数控系统补偿参数介绍
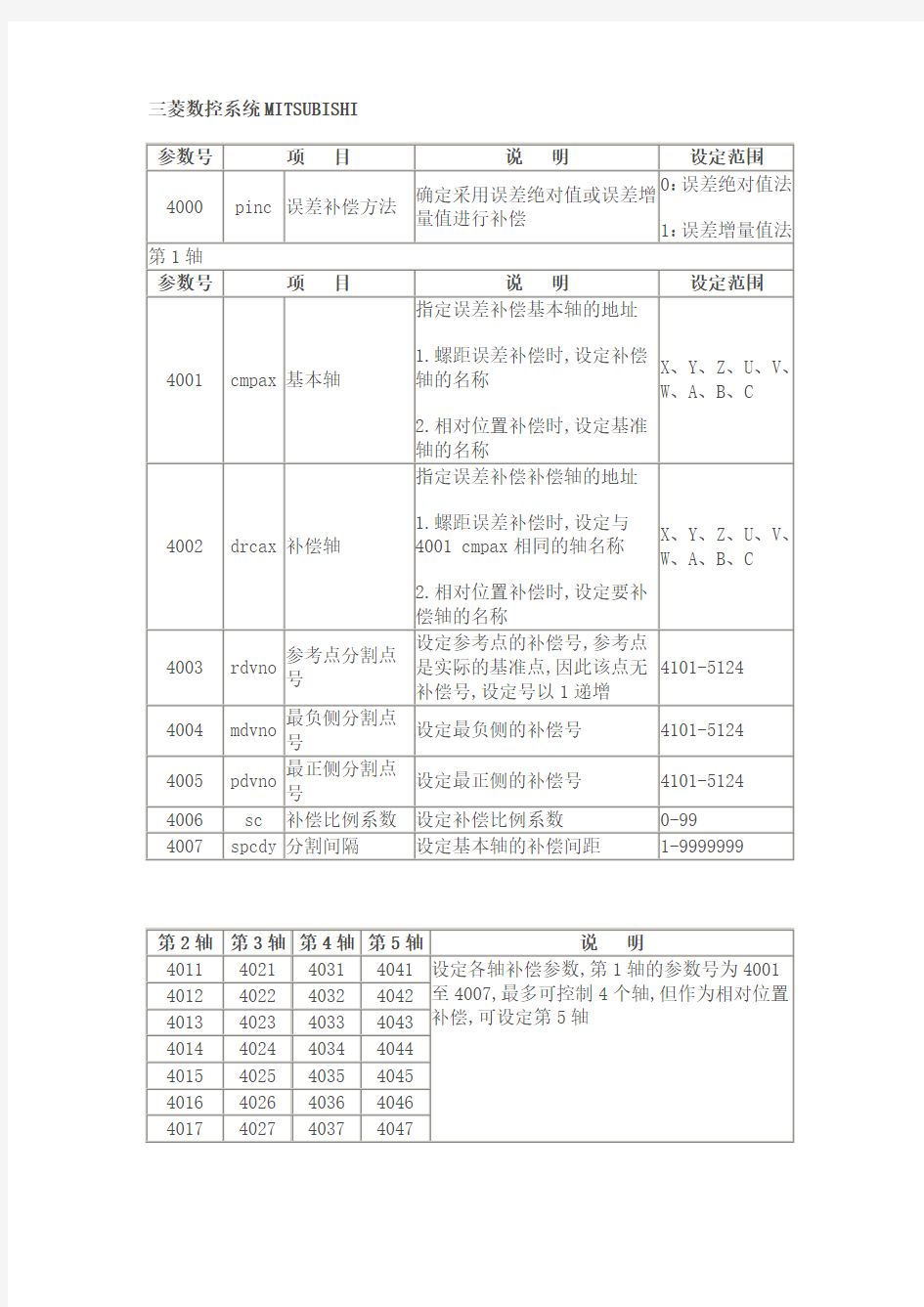

三菱数控系统MITSUBISHI
(一)FANUC-0M系列螺距误差补偿参数(表1-1)
软限位参数(表1-2)
反向间隙补偿参数(表1-3)
(二)FANUC-i系列螺距误差补偿参数(表2-1)
软限位参数(表2-2)
反向间隙补偿参数(表2-3)
(三)FANUC-0T系列螺距误差补偿参数(表3-1)
软限位参数(表3-2)
反向间隙补偿参数(表3-3)
门子数控系统SIEMENS
SINUMERIC 840D/840Di/810D螺距误差补偿参数
1. 坐标轴反向间隙补偿参数:MD32450:BACKLASH
2. 坐标轴反向间隙补偿倍率:MD32452:BACKLASH-FACTOR
补偿值范围:0.01-100.00 (In SW5 and later)
3. 螺距误差补偿值输入有效:MD32700:ENC-COMP-ENABLE
“0”有效,先置成“0”,输入完成后,再改为“1”。
螺距误差补偿有两种方法:
1. 传输法:数控系统自动生成补偿文件,将补偿文件传入计算机,在计算机上编辑并输入补偿值,再将补偿文件传回数控系统。
2. 运行法:数控系统自动生成补偿文件,将补偿文件格式改为零件程序格式,通过操作单元将补偿值输入到零件程序中,运行该零件程序,即可将补偿值写入系统。
海德汉数控系统HEIDENHAIN
(一)i530螺距误差补差参数
反向间隙补偿参数1.旋转编码器
2.直线编码器
线性坐标误差补偿参数
坐标误差补偿方式选择参数
坐标行程软限位参数
进入坐标误差补偿文件密码:807667
(二)370螺距误差补差参数
反向间隙补偿参数
线性坐标误差补偿参数
坐标误差补偿方式选择参数
坐标行程软限位参数
进入坐标误差补偿文件密码:105296
数控车床丝杠螺距误差的补偿
项目数控车床丝杠螺距误差的补偿 一、工作任务及目标 1.本项目的学习任务 (1)学习数控车床丝杠螺距误差的测量和计算方法; (2)学习数控车床螺距误差参数的设置方法。 2.通过此项目的学习要达到以下目标 (1)了解螺距误差补偿的必要性; (2)掌握螺距误差补偿的测量和计算方法; (3)能够正确设置螺距误差参数。 二、相关知识 滚珠丝杠螺母机构 数控机床进给传动装置一般是由电机通过联轴器带动滚珠丝杆旋转,由滚珠丝杆螺母机构将回转运动转换为直线运动。 1、滚珠丝杠螺母机构的结构 滚珠丝杠螺母机构的工作原理见图1;在丝杠1 和螺母 4 上各加工有圆弧形螺旋槽,将它们套装起来变成螺旋形滚道,在滚道内装满滚珠2。当丝杠相对螺母旋转时,丝杠的旋转面经滚珠推动螺母轴向移动,同时滚珠沿螺旋形滚道滚动,使丝杠和螺母之间的滑动摩擦转变为滚珠与丝杠、螺母之间的滚动摩擦。螺母螺旋槽的两端用回珠管 3 连接起来,使滚珠能够从一端重新回到另一端,构成一个闭合的循环回路。
2、进给传动误差 螺距误差:丝杠导程的实际值与理论值的偏差。例如PⅢ级滚珠丝杠副的螺距公差为0.012mm/300mm。 反向间隙:即丝杠和螺母无相对转动时丝杠和螺母之间的最大窜动。由于螺母 结构本身的游隙以及其受轴向载荷后的弹性变形,滚珠丝杠螺母机构存在轴向间隙,该轴向间隙在丝杠反向转动时表现为丝杠转动α角,而螺母未移动,则形成了反向间隙。为了保证丝杠和螺母之间的灵活运动,必须有一定的反向间隙。但反向间隙过大将严重影响机床精度。因此数控机床进给系统所使用的滚珠丝杠副必须有可靠的轴向间隙调节机构。 图2为常用的双螺母螺纹调隙式结构,它 用平键限制了螺母在螺母座内的转动,调整时只要扮动圆螺母就能将滚珠螺母沿轴 向移动一定距离,在将反向间隙减小到规定的范围后,将其锁紧。
典型数控系统数据备份与参数设置
第三章典型数控系统数据备份与参数设置在使用数控机床的过程中,有时会因为各种原因发生数据丢失,参数紊乱等各种故障。如果发生了这样的故障,而之前有没有对数据进行恰当的保存,那么就会给生产带来巨大的损失。 因此必须对数据的备份工作一定做好,以防以外的发生。对于不同的系统数据的备份和恢复的方法会有一些不同,但是都是将系统数据通过某种方式存储到系统以外的介质里。本章主要介绍西门子系统、FANUC系统和华中数控系统的数据备份与恢复。 3.1 西门子802系列数据备份与恢复 参数的备份在修改参数前必须进行备份,防止系统调乱后不能恢复。数控系统正确的运行,必须保证各种参数的正确设定,不正确的参数设置与更改,可能造成严重的后果。因此必须理解参数的功能和熟悉设定值按功能和重要性划分了参数的不同级别, 数控装置设置了三种级别的权限,允许用户修改不同级别的参数。 通过权限口令的限制,对重要参数进行保护,防止因误操作而引起故障和事故。查看参数和备份参数不需要口令。 3.1.1 数据的存储
3.1.2 西门子802系列三种启动方式 西门子802系列三种启动方式 ●方式0 正常上电启动 正常上电启动时,系统检测静态存储器,当发现静态存储器掉电,如果做过内部数据备份,系统自动将备份数据装入工作数据区后启动;如果没有系统会将出厂数据区的数据写入工作数据区后启动。 ●方式1 缺省值上电启动 机床数据、刀具数据、 零点偏移、设定数据、 螺距补偿、R 参数、 零件程序、固定循环 出厂数据区内容是系统在出厂时的标准数据(机床数据的缺省值) 备份数据区内的数据内容是系统在数据存储操作后工作数据区的全部内容复制到备份数据区 SRAM FLASH ROM
西门子840D系统下的螺距补偿和垂度补偿的综合运用
西门子840D系统下的螺距补偿和垂度补偿 的综合运用 李培志 (武汉华中自控技术发展有限公司,武汉430062) 摘要:结合西门子840D系统介绍了两种为提高机床定位精度的补偿方法------螺距补偿和垂度补偿。以及在机械几何精度不理想情况下的两种方法的综合运用。 关键词:螺距补偿垂度补偿位置精度检测 由于机械电子技术的飞速发展,数控机床作为一种高精度、高效率、稳定性强的自动化加工设备,越来越多的受到大家的关注。数控系统的定位精度是影响其高精度性能的一个重要因素,而利用西门子840D数控系统自带的螺距补偿和垂度补偿功能可以极大的降低机床的定位误差,提高机床的定位精度。本文就此介绍了这两种方法在实际中的具体使用。 补偿一般在机床几何精度调整完成后进行,这样可以尽量减少几何精度对定位精度的影响。一般情况下,螺距补偿可以运用在所有的直线进给轴以及旋转轴中,垂度补偿多运用在镗床的主轴箱滑枕或镗杆与立柱间的交叉补偿。1.螺距补偿 840D数控系统的螺距补偿功能是一种绝对型补偿方法,螺距补偿是按轴进行的。我们设定补偿起始点位置a,补偿终止点位置b,补偿间隔距离c,那么需要插补的中间点的个数n,其中n=1+(b-a)/c。 具体操作步骤如下: 1)设置轴数据MD38000 MM_ENC_COMP_MAX_POINTS[t] =n,修改此参数后会引起 NCK内存的重新分配。所以修改后要在服务菜单下对NC做一次备份。(t=所补偿轴的轴号) 2)对系统做一次NCK复位后会出现“M4400” 报警,提示轴参数丢失,此时将 1)步骤下的NC备份Load进NC系统。 3)在Nc-Active-Data菜单下Copy出“C EC_DATA”到一个新建立的备份文档目 录*.MDN中。 4)在新的目录下找到并打开补偿文件表格,根据测量人员测量的数据把相应的 补偿点直接在表格中更改。保存并关闭编辑器。 5)设定轴参数MD32700 ENC_COMP_ENABLE=0,将修改后的补偿表格 Load进NC
数控系统参数调整
返回首页 数控系统参数调整 一、实验的性质与任务 数控机床的性能在很大程度上是由系统软件的运行性能决定,在系统中对参数设置不同的值可以改变系统的运行状态。为了使数控机床运行良好,在数控机床生产过程中、生产完成以后都会根据机床以及系统的配置和测试性能对系统参数进行调试。通过该实验期望通过该实验对数控系统及其调试有更为深刻的了解。 二、实验的目的和要求 在完成实验过程中,熟悉数控系统参数手册的使用方法,了解数控系统的参数构成及其种类。通过完成参数调整实验的过程,以及观测参数调整完成后系统以及机床的运行性能,了解系统参数的变化对机床的影响。对学生的要求是: 1、养成安全、认真、踏实、严谨、一丝不苟的工作作风。 2、熟悉查阅数控系统参数手册的方法; 3、了解系统参数的体系架构; 4、掌握在数控系统中查找、修改参数的方法; 6、掌握方法; 7、撰写符合实验过程、内容的实验报告; 8、现场操作指导教师要求的实验内容; 三、预备知识 数控系统的参数体系是比较繁杂,参数种类比较多,我们在调整参数前必须对各系统参数有较为详细的了解。系统参数种类繁多,涉及到对系统的各个方面的调整。 在数控机床中,不管是那一种系统,参数按其不同功能土要有以下几种:
1.系统参数 这些参数一般由机床开发部制造商根据用户的选择进行设置,并有较高级别的密码保护,其中的参数设置对机床的功能有一定的限制,他其中的内容一般不容许用户修改。 2.用户参数 这是供用户在使用设备时自行设置的参数,内容以设备加工时所需要的各种要求为主,可随时根据用户使用的情况进行调整,如设置合理可提高设备的效率和加工精度。 2.通信参数 用以数据的输入/输出(i/o)转送。 3. PLC参数 设置PLC中容许用户修改的定时、计时、计数,刀具号及开通PLC中的一些控制功能。 4.机械参数 有些也包括在用户参数内,主要以机床行程规格,原点位置,位置的测量方式,伺服轴、主轴调整,丝杆螺距、间隙补偿方面为主,特别是伺服,主轴控制参数,设置不当设备就不能正常工作并且造成机床精度达不到要求,甚至于机床不能使用。各种不同类型的数控系统,参数的分类方法不一定相同,有些虽不明显地进行分类,但总包含着以上的内容。正常情况下,数控机床的参数厂方一般已按要求调整设置,使用中,因操作不当误改,机床使用较长时间后部分机械的磨损,断电或电路板损坏引起参数丢失,电气参数的改变等因素都会造成机床使用中出现异常,因此在故障发生后,对这些因参数引起的故障,核对并进行改正,故障就能排除,对一些可以利用参数进行调整的故障,在进行确认后,记下原来的参数,进行调整后,机床也能恢复正常。 四、实验准备工作 在进行该项实验以前,学生必须基本了解相关系统的参数说明书或者系统调试指南,能够熟练操作系统操作面板以及了解每一个按键的操作方法及意义,熟悉系统菜单的操作及含义。 五、实验内容与学时安排 总的实验时间为2天,计学时为16个学时。该实验的平台为数控实训基地北京机电院数控加工中心。本项实验将练习一些常用参数的调整,以及练习螺距误差的参数补偿。 (一) 西门子系统的螺距误差补偿 1、螺距误差补偿(LEC) 机床在出厂前,需进行螺距误差补偿(LEC)。螺距误差补偿是按轴进行的,与其有关的轴参数只有两个:
凯恩帝数控系统性能参数
凯恩帝数控系统性能参数 一、系统特征 1 插补周期1ms 2 可扩展数字接口、模拟量接口、IO接口(512点) 3 联动轴数:2, 4(可选) 4 安装于pc机的通讯传送软件exe 5 系统界面的中英文显示 二、系统功能 1 高速小线段加工 2 自动加减速功能快速进给:直线型加减速;工进或手动进给:指数型加减速 3 MDI运行模式 4 螺纹加工: 快速退尾,退尾角可调 螺距误差补偿 丝杠螺距误差补偿功能:反向间隙补偿 切直螺纹G22 x_ F_; 切锥螺纹G32 x_ z_ F_; 切割变螺距螺纹G34 x_ z_ F_ K_ 多头螺纹加工G32 X_ Z_ F_ Q_; 5 手动进给1或2轴 6 回参考点:手动回参考点,程序自动回参考点 7 手轮模拟功能 8 硬件限位软件限位 9 防护门 三、系统辅助功能 1 完整的帮助信息 2 加工时间、零件计数 3 绝对坐标x y z和增量坐标u v w 直径编程和半径编程 4 行程校验:参数设定刀具不可进入的范围 最大行程:设定在限位挡块前面,起缓冲作用 5 快速进给倍率与进给速度倍率分开 6 图形显示刀具轨迹,图像参数设定 7 主轴功能S:s**** (r/min), s** (档位) 8 卡盘控制:M10 M11 台尾控制:M78 M79 9 预留M指令:可直接作用于输入输出点 10刀具功能:T0102,在使用01号刀具,02刀补 参数:刀具长度补偿,刀具半径补偿刀具偏置量 11英制/公制转换(G20 G21) 12 程序跳转M9 P**;跳转到**行指令 13 固定循环:单一固定循环(G90 G92 G93 G94,复合固定循环(G70~G76)
fanuc数控系统参数表
fanuc数控系统参数表 FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。根据多年的实践,对常用的机床参数在维修中的应用做一介绍。 1.手摇脉冲发生器损坏。一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。当时没有合适的备件,可以先将参数900#3置“0”,暂时将手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。等手摇脉冲发生器修好后再将该参数置“1”。 2.当机床开机后返回参考点时出现超行程报警。上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种: (1)若X轴在返回参考点过程中,出现510或是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。若没有问题,则将参数0700或0704数值改为原来数值。 (2)同时按P和CAN键后开机,即可消除超程报警。 3.一台FANUC 0i数控车床,开机后不久出现ALM701报警。从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到同类型风扇,即先将参数RRM8901#0改为“1”先释放 ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为“0”。 4.一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间,发生接触碰撞异响故障。分析故障原因是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。 5.密级型参数0900~0939维修法。按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900~0939必须用MDI方
西门子840D数控系统螺距误差补偿知识
西门子840D数控系统螺距误差补偿 西门子840D数控系统不同于以前曾广泛应用的810T/M和840C等老数控系统,它并没有提供专门的双向螺距误差补偿功能,通过对840D系统中的下垂补偿功能的分析研究,找到了一种方法,成功的解决了进行双向螺距误差补偿的问题。 关键词:数控系统下垂补偿功能双向螺距误差补偿 由于机床丝杠在制造、安装和调整等方面的误差,以及磨损等原因,造成机械正反向传动误差的不一致,导致零件加工精度误差不稳定。因此也必须定期对机床坐标精度进行补偿,必要时要做双向坐标补偿,以达到坐标正反向运动误差的一致性。 一、西门子840D数控系统的补偿功能 西门子840D数控系统提供了多种补偿功能,供机床精度调整时选用。这些功能有: 1、温度补偿。 2、反向间隙补偿。 3、插补补偿,分为: (1) 螺距误差和测量系统误差补偿。 (2)下垂补偿(横梁下垂和工作台倾斜的多维交叉误差补偿)。 4、动态前馈控制(又称跟随误差补偿)。包括:速度前馈控制和扭矩前馈控制。
5、象限误差补偿(又称摩擦力补偿)。分为:常规(静态) 象限误差补偿和神经网络(动态)象限误差补偿。 6、漂移补偿。 7、电子重量平衡补偿。 在西门子840D功能说明样本和资料中所列的众多补偿功能中,都没有指出该系统具有双向螺距误差补偿功能。但是在下垂补偿功能描述中却指出,下垂补偿功能具有方向性。这样,如果下垂误差补偿功能,在基准轴和补偿轴定义为同一根轴时,就可能对该轴进行双向丝杠螺距误差补偿,由此提供了一个双向螺距误差补偿的依据。 二、840D下垂补偿功能的原理 1、下垂误差产生的原因: 由于镗铣头的重量或镗杆自身的重量,造成相关轴的位置相对于移动部件产生倾斜,也就是说,一个轴(基准轴)由于自身的重量造成下垂,相对于另一个轴(补偿轴)的绝对位置产生了变化。 2、840D下垂补偿功能参数的分析: 西门子840D数控系统的补偿功能,其补偿数据不是用机床数据描述,而是以参数变量,通过零件程序形式或通用启动文件(_INI文件) 形式来表达。描述如下: (1) $AN_CEC[t,N]:插补点N的补偿值,即基准轴的每个插补点对应于补偿轴的补偿值变量参数。 (2) $AN_CEC_INPUT_AXIS[t]:定义基准轴的名称。 (3) $AN_CEC_OUTPUT_AXIS[t]:定义对应补偿值的轴名称。 (4) $AN_CEC_STEP[t]:基准轴两插补点之间的距离。 (5) $AN_CEC_MIN[t]:基准轴补偿起始位置: (6) $AN_CEC_MAX[t]: 基准轴补偿终止位置 (7) $AN_CEC_DIRECTION[t]:定义基准轴补偿方向。其中:
FANUC 数控系统参数
Fanuc系统参数 一.16系统类参数 1.SETTING 参数 参数号符号意义16-T 16-M 0/0 TVC 代码竖向校验O O 0/1 ISO EIA/ISO代码O O 0/2 INI MDI方式公/英制O O 0/5 SEQ 自动加顺序号O O 2/0 RDG 远程诊断O O 3216 自动加程序段号时程序段号的间隔O O 2.RS232C口参数 20 I/O通道(接口板): 0,1: 主CPU板JD5A 2: 主CPU板JD5B 3: 远程缓冲JD5C或选择板1的JD6A(RS-422) 5: Data Server 10 :DNC1/DNC2接口O O 100/3 NCR 程序段结束的输出码O O 100/5 ND3 DNC运行时:读一段/读至缓冲器满O O I/O 通道0的参数: 101/0 SB2 停止位数O O 101/3 ASII 数据输入代码:ASCII或EIA/ISO O O 101/7 NFD 数据输出时数据后的同步孔的输出O O 102 输入输出设备号: 0:普通RS-232口设备(用DC1-DC4码) 3:Handy File(3〃软盘驱动器)O O 103 波特率: 10:4800 11:9600 12:19200 O O I/O 通道1的参数: 111/0 SB2 停止位数O O 111/3 ASI 数据输入代码:ASCII或EIA/ISO O O 111/7 NFD 数据输出时数据后的同步孔的输出O O 112 输入输出设备号: 0:普通RS-232口设备(用DC1-DC4码) 3:Handy File(3〃软盘驱动器)O O 113 波特率:10:4800 11:9600 12:19200 O O 其它通道参数请见参数说明书。
发那科0i mate-TC数控系统参数的设置方法
发那科0i mate-TC数控系统参数的设置方法 摘要:数控系统参数设置的正确与否直接影响数控机床的使用,本文介绍了发那科0i mate-TC数控系统参数设置的方法,通过对参数设置过程的描述,便于掌握此系统参数的设置方法和参数设置过程中的注意事项。 关键词:数控系统参数设置 无论哪个公司的数控系统都有大量的参数,有的一项参数又有八位,粗略计算起来一套CNC系统配置的数控机床就有近千个参数要设定。这些参数设置正确与否直接影响数控机床的使用和其性能的发挥。特别是用户能充分掌握和熟悉这些参数的设置,将使一台数控机床的使用和性能发挥上升到一个新的水平,也给数控机床的故障诊断和维修带来很大的方便,参数的修改还可以开发CNC系统某些在数控机床订购时没有表现出来的功能,对二次开发会有一定的帮助。 1.显示参数的操作 1)按MDI面板上的“SYSTEM”功能键数次,或者按“SYSTEM”功能键一次,再按[参数]软键,选择参数画面。 2)参数画面由多页组成,可以通过以下两种方法选择需要显示的参数所在的画面。 (1)用光标移动键或翻页键,显示需要的画面。 (2)由键盘输入要显示的参数号,然后按下[搜索]软健,这样可显示指定参数所在的页面,光标同时处于指定参数的位置。 2.用MDI设定参数 1)在操作面板上选择MDI方式或急停状态。 2)按下“OFS/SET”功能键,再按[设定]软键,可显示设定画面的第一页。 3)将光标移动到“参数写入”处,按[操作]软键,进入下一级画面。 4)按[NO:1]软键或输入1,再按[输入]软键,将“参数写入”设定为1;这样参数处于可写入状态,同时CNC发生100号报警。 5)按“SYSTEM”功能键,再按[参数]软键,进入参数画面,找到需要设定参数的画面,将光标置于需要设定的位置上。 6)输入参数,然后按“INPUT”键,输入的数据将被设定到光标指定的参数中;
数控车床刀尖半径补偿的原理和应用介绍
数控车床刀尖半径补偿的原理和应用分析 (2011-11-07 19:39:41) 分类:工程技术 标签: 杂谈 摘要:分析了数控车削中因刀尖圆弧产生误差的原因,介绍了纠正误差的思路及半径补偿的工作原理,明确了半径补偿的概念。结合实际,系统介绍了刀具半径补偿的应用方法,及使用中的注意事项。 Abstract: Analyzed the error's reason in numerical control turning because of arc of cutting tool , introduced the correction error's mentality and the radius compensation principle of work, cleared about the radius compensation concept. Union reality, introduced the cutting tool radius compensation application method, and in use matters needing attention.. 关键词:数控车床;假想刀尖;半径补偿;程序轮廓;原理;应用; Key word: CNC lathe;immaginary cutting tool point; radius compensation; procedure outline; principle; using 1、前言 在数控车床的学习中,刀尖半径补偿功能,一直是一个难点。一方面,由于它的理论复杂,应用条件严格,让一些人感觉无从下手;另一方面,由于常用的台阶轴类的加工,通过几何补偿也能达到精度要求,它的特点不能有效体现,使一些人对它不够重视。事实上,在现代数控系统中,刀尖半径补偿,对于提高工件综合加工精度具有非常重要的作用,是一个必须熟练掌握的功能。 2、刀尖圆弧半径补偿的原理 (1)半径补偿的原因 在学习刀尖圆弧的概念前,我们认为刀片是尖锐的,并把刀尖看作一个点,刀具之所以能够实现复杂轮廓的加工,就是因为刀尖能够严格沿着编程的轨迹进行切削。但实际上,目前广泛使用的机夹刀片的切削尖,都有一个微小的圆弧,这样做,既可以提高刀具的耐用度,也可以提高工件的表面质量。而且,不管多么尖的刀片,经过一段时间的使用,刀尖都会磨成一个圆弧,导致在实际加工中,是一段圆弧刃在切削,这种情况与理想刀尖的切削在效果上完全不同。
FANUC0系统和三菱系统补偿方法和步骤
光动LICS-100激光多普勒激光干涉仪线性补偿方法及其步骤 1.Faunc0系统 测量前将原有反向间隙和螺距补偿都消去. ⑴反向间隙补偿 进入轴规格参数 将反向间隙〈B〉值填入相对应的轴的补偿地址: 进入反向间隙补偿地址backlash:输入对应轴的补偿值即可。(备注两端反向间隙,故补偿的 有两个数值) ⑵螺距误差补偿 通用:螺距补偿需要设置的参数有螺距补偿方式,补偿轴,参考点,补偿区间(即最负点和 最正点),补偿倍率,补偿节距。六大要素。 ① Faunc0系统只支持增量补偿,所以一开始无需要设置补偿方式 ②设置参考点在参数地址的[3620]处(Faunc系统的补偿点共计为0—1124个点,为 XYZ 轴所共用,所以我们可以为XYZ三个轴设定相应的有效区间,正常我们可设置0-100 号码,为X轴使用;100-200为Y轴使用;200以后为Z使用。所以对应轴的参考点地 址根据需要设置为相应区间的任意点)如图A-1所示。 图 A-1 ③设置相对应的补偿区间 地址3621和 3622 3621为设置补偿区间内的最负点 3622为设置补偿区间内的最正点 即例如:测量范围为-450---0则3621设置的补偿地址即为-450的补偿地址;3622则为0的 补偿地址。 附加:3620---3622的区间设置方法 例:测量Z轴由-450测量到0,节距为 25mm
Z轴补偿区间我们假设为200以后,假设参考点为309。 则3620处填 309 3621最负处的地址为参考点-(测量长度/节距)+1=309-18+1=292即3621处填写 292 3621最正处填写参考点地址+1的地址数,即310。 这样参考点和补偿地址都设置好了。如图 A-2 图 A-2 ④3623 为倍率。Faunc 系统相对补偿参数限制为0——±7,所以倍率为 1 的情况下,如误 差中有很多的+7或者-7的话说明实际补偿误差可能大于这个数值,(例如:误差可能大于± 7,比如误差有8,10,-9那它也只能显示到7,7,-7,)那这个时候我们就要改倍率为2。 数值才会比较精确。 ④ 3624为设置测量时候实际的节距 例测量-450——0,每段测量25mm,则3624处设置为25000(大部分数控机床的设置单位基数为0.001mm如图 A-3
840D系统补偿功能汇总
840D系统补偿功能汇总 数控机床的的几何精度,定位精度一方面受到机械加工母机的精度限制,另一方面更受到机床的材料和机械安装工艺的限制,往往不能够达到设计精度要求。而要在以上诸多方面来提高数控机床的几何精度,定位精度需要投入大量的人力物力。在机械很难提高精度的情况下,通过数控电气补偿能够使数控机床达到设计精度。 一、反向间隙补偿 机床反向间隙误差是指由于机床传动链中机械间隙的存在,机床执行件在运动过程中,从正向运动变为反向运动时,执行件的运动量与目标值存在的误差,最后反映为叠加至工件上的加工精度。 机床反向间隙是机床传动链中各传动单元的间隙综合,如电机与联轴器的间隙,齿轮箱中齿轮间隙,齿轮与齿条间隙,滚珠丝杠螺母副与机床运动部件贴合面的间隙等等。 反向间隙直接影响到数控机床的定位精度和重复定位精度。在半闭环下,由伺服电机编码器作为位置环反馈信号。机械间隙无法由编码器检测到,在机械调整到最佳状态下需要进行反向间隙补偿。在全闭环下,直线轴一般采用光栅尺作为位置环反馈信号,旋转轴一般采用外接编码器或圆光栅作为位置环反馈信号。由于是直接检测运动部件的实际位移,理论上讲全闭环下无反向间隙。但是由于光栅尺或圆光栅本身精度的限制和安装工艺的限制等等,使得全闭环下也具有“反向间隙”,这在激光干涉仪下能很明显看出来,一般在0.01mm
左右。 西门子840D数控系统反向间隙补偿的方法如下: 测得反向间隙值后在轴机床数据输入反向差值,单位为mm。 MD32450 BACKLASH [0] MD32450 BACKLASH [1] 其中[0]为半闭环,[1]为全闭环。输入后按下Reset键,回参考点后补偿生效。可以在诊断→服务显示→轴调整→绝对补偿值测量系统中看到补偿效果。 反向间隙补偿能够在较大程度上提高数控机床的定位精度、重复定位精度,但是它的值是固定的,不能适用于机床的整个行程,这就需要另一种电气补偿手段,螺距误差补偿。两者结合能使数控机床达到较高的定位精度和重复定位精度。 二、螺距误差补偿 重型数控机床的传动机构,一般为滚珠丝杠传动或齿轮齿条传动。受到制造精度的影响丝杠上的螺距和齿条齿轮的齿距都有微小的误差,对于半闭环数控机床,这将直接影响其定位精度与重复定位精度。而对于全闭环,由于受到光栅尺自身的精度,光栅尺安装的直线度、挠度的影响也会产生“螺距误差”。 西门子840D数控系统螺距误差补偿原理如下图所示:
最新FANUC数控系统参数
F A N U C数控系统参数
Fanuc系统参数 一.16系统类参数 1. SETTING 参数 参数号符号意义 16-T 16-M 0/0 TVC 代码竖向校验 O O 0/1 ISO EIA/ISO代码 O O 0/2 INI MDI方式公/英制 O O 0/5 SEQ 自动加顺序号 O O 2/0 RDG 远程诊断 O O 3216 自动加程序段号时程序段号的间隔 O O 2.RS232C口参数 20 I/O通道(接口板): 0,1: 主CPU板JD5A 2: 主CPU板JD5B 3: 远程缓冲JD5C或选择板1的JD6A(RS-422) 5: Data Server 10 :DNC1/DNC2接口 O O 100/3 NCR 程序段结束的输出码 O O 100/5 ND3 DNC运行时:读一段/读至缓冲器满 O O I/O 通道0的参数: 101/0 SB2 停止位数 O O
101/3 ASII 数据输入代码:ASCII或EIA/ISO O O 101/7 NFD 数据输出时数据后的同步孔的输出 O O 102 输入输出设备号: 0:普通RS-232口设备(用DC1-DC4码) 3:Handy File(3〃软盘驱动器) O O 103 波特率: 10:4800 11:9600 12:19200 O O I/O 通道1的参数: 111/0 SB2 停止位数 O O 111/3 ASI 数据输入代码:ASCII或EIA/ISO O O 111/7 NFD 数据输出时数据后的同步孔的输出 O O 112 输入输出设备号: 0:普通RS-232口设备(用DC1-DC4码) 3:Handy File(3〃软盘驱动器) O O 113 波特率:10:4800 11:9600 12:19200 O O 其它通道参数请见参数说明书。 3.进给伺服控制参数 1001/0 INM 公/英制丝杠 O O
数控系统的参数设置与调试
数控系统的参数设置与调试 一、实验目的与要求 1. 熟悉并掌握数控系统参数的定义及设置方法 2. 了解参数的设置对数控系统运行的作用及影响 二、实验仪器与设备 QS-CNC-T1 智能网络化数控系统综合实验台 三、实验相关知识 数控系统正常运行的重要条件是必须保证各种参数的正确设定,不正确的参数设置与更改,可能造成严重的后果。因此,必须理解参数的功能,熟悉设定值。 数控系统按参数的功能和重要性大小划分了不同的级别,允许用户修改一定级别的参数,通过权限口令的限制对重要的参数进行保护,防止用户因误操作而造成故障和事故。 四、实验内容与步骤 内容1. 掌握数控系统常用参数的功能及设置方法; 2. 对轴数据、传动系统参数、主轴参数、软限位等相关参数进行设定; 3. 观察参数修改后对机床运行状态的影响。 步骤1. 轴数据设置 (1)按软件:诊断→机床数据→轴数据 (2)按软件轴+或轴-选择相应的坐标轴。首先选择X 轴。 (3)按↑或↓,将光标移至30130,输入数值()确定。 (4)按↓,将光标移至30240,输入数值()确定。 (5)按搜索→输入要查询的机床数据号“34200”按确认,光标立即定位刀所要查询的机床数据34200 上,输入设定值()按确定。 (6)按轴+,选择Z轴。重复步骤4-7:设定30130=(),30240=(),34200=()。 (7)按调试→调试开关→NC ,选择正常上电启动,确认。 2. 传动系统的机械参数设定 (1)设定下列参数: 31020=1000,31400=1000 (步进电机步距角 1.8 度,采用5 细分,则:360/1.8*5=1000) 31030=5 丝杠螺距,单位:mm 31050=1,31060=1 即减速比31050/31060=1/1=1 说明: 以上设定的操作步骤,先选定X 轴参数,再设定Z 轴参数。下面其它参数设定的操作步骤与此相同,不再赘述。 (2)设定相关的速度(X 轴、Z 轴) 32000=3000;最大轴速度mm/min; 32010=3000;点动快速mm/min; 32020=2000;点动速度mm/min; 32260=3000;电机额定转速; 36200=11500;坐标速度极限。 (3)系统重新上电。
FANUC数控系统螺距误差补偿功能.
FANUC数控系统螺距误差补偿功能数控机床的直线轴精度表现在轴进给上主要由三项精度:反向间隙、定位精度和重复定位精度,其中反向间隙、重复定位精度可以通过机械装置的调整来实现,而定位精度在很大程度上取决于直线轴传动链中滚珠丝杠的螺距制造精度。在数控机床生产制造及加工应用中,在调整好机床反向间隙、重复定位精度后,要减小定位误差,用数控系统的螺距误差螺距补偿功能是最节约成本且直接有效的方法。 FANUC数控系统已广泛应用在数控机床上,其螺距误差补偿功能有一定的典型性。螺距补偿原理是将机械参考点返回后的位置作为螺距补偿原点,CNC系统以设定在螺距误差补偿参数中的螺距补偿量和CNC移动指令,综合控制伺服轴的移动量,补偿丝杠的螺距误差。 1 螺距误差补偿前的准备工作回参考点后,编程控制需要螺距误差补偿的轴,从参考点或机床机械位置某一点间歇移动若干个等距检测点,用激光干涉仪等检测计量仪器检测出各点的定位误差。检测点数量可根据机床的工作长度自设。 2 设定螺距误差补偿参数 打开参数开关在MDI方式下设置参数PWE=1,系统出现1000报警,同时按CAN和RESET键清除报警。 ⑴参考点的螺距误差补偿点号码参数X轴参数No.1000Z轴参数No.2000 ⑵螺距误差补偿倍率参数参数No.0011的PML1,PML2。.PML2 PML1 倍率( 0 0 31,0 1 32, 1 0 34,1 1 38)设定的螺距补偿值,乘上该倍率,即为输出值. ⑶螺距误差补偿点间隔X轴参数No.756Z轴参数No.757螺距误差补偿点为等间隔,设定范围从0到999999999。一般设定单位是0.001毫米。⑷螺距补偿点数目各轴从0到127共128个螺距补偿点 ⑸螺距补偿量及螺距补偿点的号X轴参数No.(1001+螺距补偿点号)Z轴参数No.(2001+螺距补偿点号)每个螺距补偿点螺距补偿量的范围为(-7)~(+7)乘以螺距补偿倍率。负侧最远补偿点的号=原点补偿点-(负侧的机床长/补偿点间隔)+1正侧最远补偿点的号=原点补偿点+(正侧的机床长/补偿点间隔) 3设定好螺距补偿参数后,在MDI方式下,设置参数PWE=0,关闭参数写状态。机床断电后重新启动,回参考点,螺距补偿生效。再检测定位精度,没达到要求的补偿点可反复修改补偿量,直至达到要求。 4 应用举例 数控车床的参考点一般设在机械正限位不到处,参考点与正限位之间的范围在加工工件时很少用到,下面以一台数控车床的Z轴丝杠精度检测结果,阐述螺距误差补偿如何应用。 编程后运行,检测Z轴移动点,每点来回检测
机床数控系统的参数及报警概述
机床数控系统的参数及报警 第一概述 首先要了解的问题是:什么是机床参数,为什么要设置参数。 数控系统制造厂家的用户是机床制造厂家,而不是使用机床的最终用户,机床厂去向数控装置厂家去买数控装置。当然,也有些机床厂家是自己制造数控装置,不用去买别人的数控系统。但是不管怎么说,从设计、试制、最后制造出产品,都希望这种数控系统或者说数控装置,能用在各式各样机床上,这样,自己的用户就多了,市场占有就大了。 为此,数控装置制造厂家为了适用面广,而为数控装置预留了很大的适应范围的余地,或者说,留了很多空白点,要用户根据自己的需要去填写,以便适应自己设计,制造的机床。例如某一个轴的加减速时间,跟随误差大小;还有一些是机床制造厂在调试过程中来决定的参数,如:正反向间隙,螺距的补偿等等。 当然,有些参数是数控装置制造厂家自己来规定的,比如:你所买的系统应是几轴联运,以及其他的一些规定参数。 还有一部分可以由最终用户根据必要的情况进行适当的修改的。 数控系统有一些是全数字化的,在进行调节器运算时,必须有一些参数,如比例放大系数,微分时间常数,积分时间常数等等都必须事先设定,当程序进行到这里,去查参数就可以了。这些参数也是可以在一定范围内变化的。 总之,数控装置参数是非常重要的。它所以重要,一方面了解和掌握了参数,就给使用和更好的发挥机床性能上很大的帮助,另一方面在维修中,很多软件的问题,就是出在参数上,了解与掌握参数,就可以维修一些软件的故障。 参数的种类很多,有些参考书中对它进行了分类,分为状态型,比率型,真实值型等,还可以从另一个角度分为数控装置制造商对用户的保密参数,和可以告诉用户参数含义的参数。不管怎么说,我们确实还有很多参数弄不清楚,对于现场维修人员来说,把上千个参数都弄的明明白白是不可能的,一方面是没有资料,另一方面是没有那么多时间去研究它。这个任务留给科研院所去做吧! 对于现场维修人员,又必须弄懂一些最基本的参数,所以,我们根据维修手册提供的,以及历次这些大公司培训的记录,整理出来,供大家参考。 目前在我国主要两大家的产品比较多:日本FANUC,德国西门子。它们的产品系列也很庞大,但提供的有关资料比较少,有很多新的产品,各种产品的参数完全不同。为此,介绍目标是FANUC6M系统和西门子的810系统。
fanuc数控系统常用参数表
fanuc数控系统参数表 2010-07-16 14:01 FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。根据多年的实践,对常用的机床参数在维修中的应用做一介绍。 1.手摇脉冲发生器损坏。一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。当时没有合适的备件,可以先将参数900#3置“0”,暂时将手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。等手摇脉冲发生器修好后再将该参数置“1”。 2.当机床开机后返回参考点时出现超行程报警。上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种:(1)若X轴在返回参考点过程中,出现510或是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。若没有问题,则将参数0700或0704数值改为原来数值。 (2)同时按P和CAN键后开机,即可消除超程报警。 3.一台FANUC 0i数控车床,开机后不久出现ALM701报警。从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到
同类型风扇,即先将参数RRM8901#0改为“1”先释放ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为“0”。 4.一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间,发生接触碰撞异响故障。分析故障原因是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。 5.密级型参数0900~0939维修法。按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900~0939必须用MDI方式输入很不方便。现介绍一种可以传输包含密级型参数0900~0939在内的传输方法,步骤如下: (1)将方式开关设定在EDIT位置; (2)按PARAM键,选择显示参数的画面; (3)将外部接收设备设定在STAND BY(准备)状态; (4)先按EOB键不放开,再按OUTPOT键即将全部参数输出。 6.一台FANUC 0MC立式加工中心,由于绝对位置编码电池失效,导致X、Y、Z丢失参考点,必须重新设置参考点。
数控机床参数
数控机床参数 一、掌握数控机床参数的重要性: 无论哪个公司的数控系统都有大量的参数,如日本的FANUC公司6T-B系统就有294项参数。有的一项参数又有八位,粗略计算起来一套CNC系统配置的数控机床就有近千个参数要设定。这些参数设置正确与否直接影响数控机床的使用和其性能的发挥。特别是用户能充分掌握和熟悉这些参数,将会使一台数控机床的使用和性能发挥上升到一个新的水平。实践证明充分的了解参数的含义会给数控机床的故障诊断和维修带来很大的方便,会大大减少故障诊断的时间,提高机床的利用率。同时,一台数控机床的参数设置还是了解CNC系统软件设计 指导思想的窗口,也是衡量机床品质的参考数据。在条件允许的情况下,参数的修改还可以开发CNC系统某些在数控机床订购时没有表现出来的功能,对二次开发会有一定的帮助。 因此,无论是那一型号的CNC系统,了解和掌握参数的含义都是非常重要的。 另外,还有一点要说明的是,数控机床的制造厂在机床出厂时就会把相关的参数设置正确、完全,同时还给用户一份与机床设置完全符合的参数表。然而,目前这一点却做的不尽如人意,参数表与参数设置不符的现象时有发生,给日后数控机床的故障诊断带来很大的麻烦。对原始数据和原始设置没有把握,在鼓掌中就很难下决心来确定故障产生的原因,无论是对用户和维修者本人都带来不良的影响。因此,在购置数控机床验收时,应把随机所带的参数与机床上的实际设置进行校对,在制造厂的服务人员没有离开之前落实此项工作,资料首先要齐全、正确,有不懂的尽管发问,搞清参数的含义,为将来故障诊断扫除障碍。 数控机床在出厂前,已将所采用的CNC系统设置了许多初始参数来配合、适应相配套的每台数控机床的具体情况,部分参数还需要调试来确定。这些具体参数的参数表或参数纸带应该交付给用户。在数控维修中,有时要利用机床某些参数调整机床,有些参数要根据机床的运行状态进行必要的修正,所以维修人员要熟悉机床参数。以日本FANUC公司的10、11、12系统为例,在软件方面共设有26个大类的机床参数。它们是:与设定有关的参数、定时器参数、与控制器有关的参数、坐标系参数、进给速度参数、加/减速成控制参数、伺服参数、DI/DO(数据输入输出)参数,CRT/MDI及逻辑参数、程序参数、I/O接口参数、刀具偏移参数、固定循环参数、缩放及坐标旋转参数、自动拐角倍率参数、单放向定位参数、用户宏程序、跳步信号输入功能、刀具自动偏移及刀具长度自动测量,刀具寿命管理、维修等有关的参数。用户买到机床后,首先应将这份参数表复制存档。一份存放在机床的文件箱内,供操作者或维修人员在使用和维修机床时参考。另一份存入机床的档案中。这些参数设定的正确与否将直接影响到机床的正常工作及机床性能充分发挥。维修人员必须了解和掌握这些参数,并将整机参数的初始设定记录在案,妥善保存,以便维修时使用。 二、数控机床参数的分类 无论是哪种型号的CNC系统都有大量的参数,少则几百个,多则上千个,看起来眼花缭乱。经过仔细研究,归纳起来又有一定的共性可言,现提供其分类方式以做参考。
840D系统补偿功能汇总
840D 系统补偿功能汇总 数控机床的的几何精度,定位精度一方面受到机械加工母机的精度限制,另一方面更受到机床的材料和机械安装工艺的限制,往往不能够达到设计精度要求。而要在以上诸多方面来提高数控机床的几何精度,定位精度需要投入大量的人力物力。在机械很难提高精度的情况下,通过数控电气补偿能够使数控机床达到设计精度。 一、反向间隙补偿机床反向间隙误差是指由于机床传动链中机械间隙的存在,机床执行件在运动过程中,从正向运动变为反向运动时,执行件的运动量与目标值存在的误差,最后反映为叠加至工件上的加工精度。 机床反向间隙是机床传动链中各传动单元的间隙综合,如电机与联轴器的间隙,齿轮箱中齿轮间隙,齿轮与齿条间隙,滚珠丝杠螺母副与机床运动部件贴合面的间隙等等。 反向间隙直接影响到数控机床的定位精度和重复定位精度。在半闭环下,由伺服电机编码器作为位置环反馈信号。机械间隙无法由编码器检测到,在机械调整到最佳状态下需要进行反向间隙补偿。在全闭环下,直线轴一般采用光栅尺作为位置环反馈信号,旋转轴一般采用外接编码器或圆光栅作为位置环反馈信号。由于是直接检测运动部件的实际位移,理论上讲全闭环下无反向间隙。但是由于光栅尺或圆光栅本身精度的限制和安装工艺的限制等等,使得全闭环下也具有“反向间隙”,这在激光干涉仪下能很明显看出来,一般在 0.01mm 左右。 西门子840D数控系统反向间隙补偿的方法如下:
测得反向间隙值后在轴机床数据输入反向差值,单位为mm。 MD32450 BACKLASH [0] MD32450 BACKLASH [1] 其中[0]为半闭环,[1]为全闭环。输入后按下Reset键,回参考点后补偿生效。可以在诊断-服务显示-轴调整-绝对补偿值测量系统中看到补偿效果。 反向间隙补偿能够在较大程度上提高数控机床的定位精度、重复 定位精度,但是它的值是固定的,不能适用于机床的整个行程,这就需要另一种电气补偿手段,螺距误差补偿。两者结合能使数控机床达到较高的定位精度和重复定位精度。 二、螺距误差补偿 重型数控机床的传动机构,一般为滚珠丝杠传动或齿轮齿条传动。受到制造精度的影响丝杠上的螺距和齿条齿轮的齿距都有微小的误差,对于半闭环数控机床,这将直接影响其定位精度与重复定位精度。而对于全闭环,由于受到光栅尺自身的精度,光栅尺安装的直线度、挠度的影响也会产生“螺距误差”。 西门子840D数控系统螺距误差补偿原理如下图所示: