数码管驱动芯片TM1620『官方最新版』

LED 驱动控制专用电路
一、 概述
TM1620
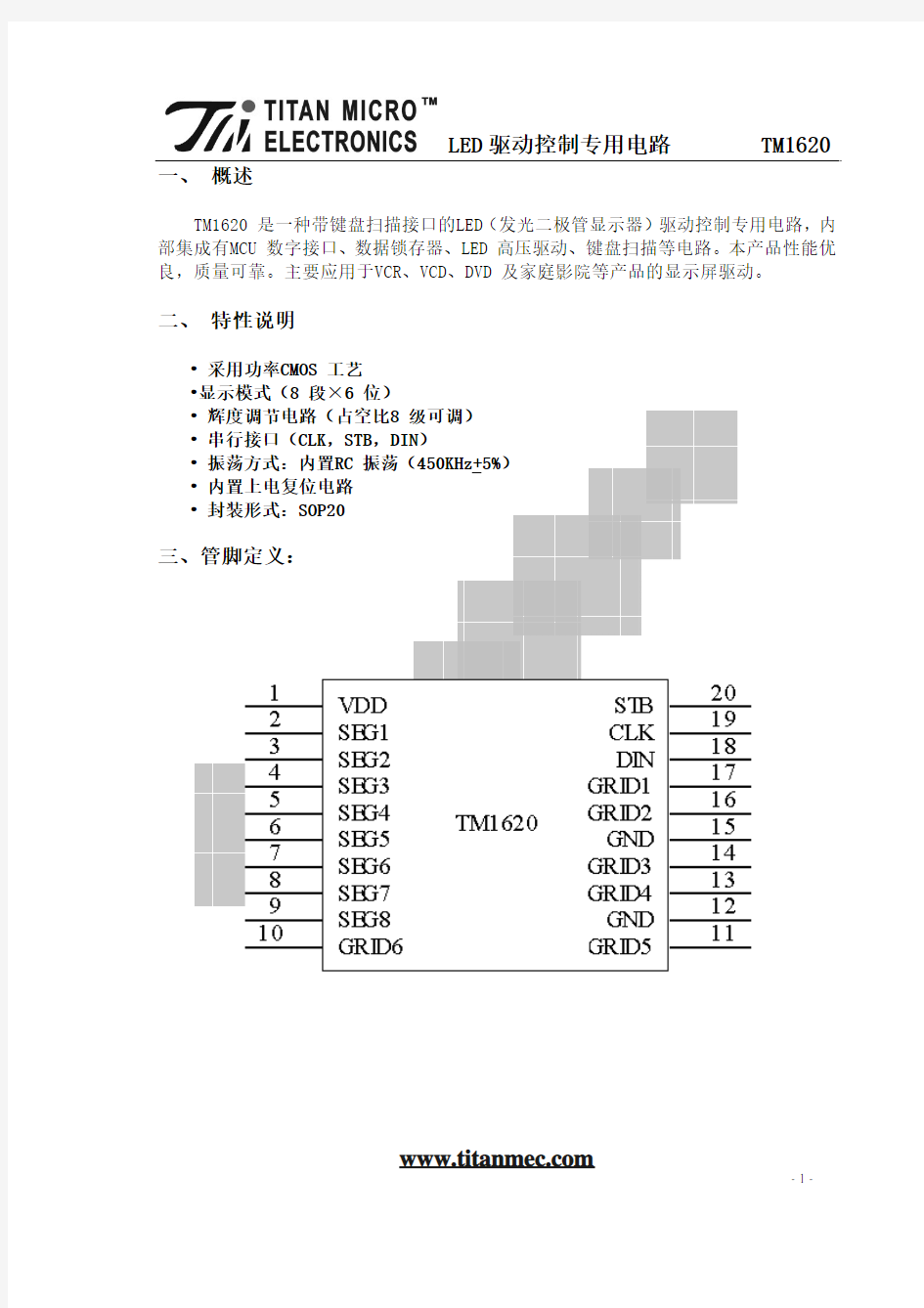
TM1620 是一种带键盘扫描接口的LED(发光二极管显示器)驱动控制专用电路,内 部集成有MCU 数字接口、数据锁存器、LED 高压驱动、键盘扫描等电路。本产品性能优 良,质量可靠。主要应用于VCR、VCD、DVD 及家庭影院等产品的显示屏驱动。
二、 特性说明
? 采用功率CMOS 工艺 ?显示模式(8 段×6 位) ? 辉度调节电路(占空比8 级可调) ? 串行接口(CLK,STB,DIN) ? 振荡方式:内置RC 振荡(450KHz+5%) ? 内置上电复位电路 ? 封装形式:SOP20
三、管脚定义:
https://www.360docs.net/doc/2211545827.html,
-1-
LED 驱动控制专用电路
四、管脚功能定义
符号 DIN 管脚名称 数据输入 说明 在时钟上升沿输入串行数据,从低位开始
TM1620
STB
片选
在上升或下降沿初始化串行接口,随后等待接收指 令。STB 为低后的第一个字节作为指令,当处理指 令时, 当前其它处理被终止。 当STB 为高时, CLK 被 忽略 在上升沿读取串行数据,下降沿输出数据 段输出(也用作键扫描),p管开漏输出 位输出,N管开漏输出 5V±10% 接系统地
CLK Seg1~Seg8 Grid1~ Grid6 VDD GND
时钟输入 输出(段) 输出(位) 逻辑电源 逻辑地
▲ 注意:DIO口输出数据时为N管开漏输出,在读键的时候需要外接1K-10K的上拉电阻。本公司推
荐10K的上拉电阻。 DIO在时钟的下降沿控制N管的动作, 此时读数时不稳定, 你可以参考图 (6) , 在时钟的上升沿读数才时稳定。
VCC
芯片内部 电路
10K
DIO
CT
GND
图(1)
五、 显示寄存器地址和显示模式:
该寄存器存储通过串行接口从外部器件传送到TM1620的数据,地址从00H-0AH共11字节单元, 分别与芯片SGE和GRID管脚所接的LED灯对应,分配如下图:
https://www.360docs.net/doc/2211545827.html,
-2-
LED 驱动控制专用电路
8 G E S B7 GRID1 GRID2 GRID3 GRID4 GRID5 GRID6 LSB B6 0 B5 B4 B3 B2 B1 1 B0 0 显示模式 6位8段 7 G E S B6 6 G E S B5 5 G E S B4 4 G E S B3 无关项 3 G E S B2 2 G E S B1 1 G E S B0
TM1620
写LED显示数据的时候,按照从显示地址从低位到高位,从数据字节的低位到高位操作。
xxHL(低四位) 00HL 02HL 04HL 06HL 08HL 0AHL
xxHU(高四位) 00HU 02HU 04HU 06HU 08HU 0AHU
图(2)
六、 指令说明:
指令用来设置显示模式和LED 驱动器的状态。 在STB下降沿后由DIO输入的第一个字节作为一条指令。经过译码,取最高B7、B6两位比特位以 区别不同的指令。
B7 0 0 1 1
B6 0 1 0 1
指令 显示模式设置 数据命令设置 显示控制命令设置 地址命令设置
图(3) 如果在指令或数据传输时STB被置为高电平,串行通讯被初始化,并且正在传送的指令或数据无 效(之前传送的指令或数据保持有效)。
(1) 显示模式设置:
MSB B7 0
图(4) 该指令用来设置选择段和位的个数,TM1620 没有段位复用脚,但是程序设置需要写模式命令 (02),因为 TM1620 内部晶源和 TM1623 内部晶源是相同的。当指令执行时,显示被强制关闭。要 送显示控制命令开显示,原先显示的数据内容不会被改变,但当相同模式被设置时,则上述情况并 不发生。上电时,默认设置模式为 7 位 8 段。
(2) 数据命令设置:
https://www.360docs.net/doc/2211545827.html,
-3-
74hc595驱动数码管
74hc595驱动数码管 版本一 顶层例化文件 module seg7x8( input CLOCK_50, // 板载50MHz时钟 input Q_KEY, // 板载按键RST output [7:0] SEG7_SEG, // 七段数码管 段脚 output [2:0] SEG7_SEL // 七段数码管 待译位脚 ); // 显示效果: // ------------------------- // |1 |2.|3 |4 | |B |C |D | // ------------------------- seg7x8_drive u0( .i_clk (CLOCK_50), .i_rst_n (Q_KEY), .i_turn_off (8'b0000_1000), // 熄灭位[2进制][此处取第3位 .i_dp (8'b0100_0000), // 小数点位[2进制][此处取第6位 .i_data (32'h1234_ABCD), // 欲显数据[16进制] .o_seg(SEG7_SEG), .o_sel(SEG7_SEL) ); endmodule 驱动文件 module seg7x8_drive(
input i_clk, input i_rst_n, input [7:0] i_turn_off, // 熄灭位[2进制 input [7:0] i_dp, // 小数点位[2进制 input [31:0] i_data, // 欲显数据[16进制 output [7:0] o_seg, // 段脚 output [2:0] o_sel // 使用74HC138译出位脚 ); //++++++++++++++++++++++++++++++++++++++ // 分频部分 开始 //++++++++++++++++++++++++++++++++++++++ reg [16:0] cnt; // 计数子 always @ (posedge i_clk, negedge i_rst_n) if (!i_rst_n) cnt <= 0; else cnt <= cnt + 1'b1; wire seg7_clk = cnt[16]; // (2^17/50M = 2.6114)ms //-------------------------------------- // 分频部分 结束 //-------------------------------------- //++++++++++++++++++++++++++++++++++++++ // 动态扫描, 生成seg7_addr 开始 //++++++++++++++++++++++++++++++++++++++ reg [2:0] seg7_addr; // 第几个seg7 always @ (posedge seg7_clk, negedge i_rst_n) if (!i_rst_n) seg7_addr <= 0; else seg7_addr <= seg7_addr + 1'b1; //-------------------------------------- // 动态扫描, 生成seg7_addr 结束 //-------------------------------------- //++++++++++++++++++++++++++++++++++++++
7段数码管驱动芯片,7279原理与应用
HD7279A的原理与应用 作者:河北科技大学电气信息学院王改名赫苏敏王忠杰 摘要:详述一种专用的智能键盘和LED控制芯片HD7279A的工作原理、工作时序及其控制指令;介绍HD7279A与CPU及键盘显示器的接口电路,并给出实际接口电路的程序实例和实际应用中的注意事项。 关键词:HD7279A 接口电路接口程序 HD7279A硬件电路图HD7279A是一种管理键盘和LED显示器的专用智能控制芯片。它能对8位共阴极LED显示器或64个LED发光管进行管理和驱动,同时能对多达8×8的键盘矩阵的按键情况进行监视,具有自动消除键抖动并识别按键代码的功能,从而可以提高CPU工作的效率。HD7279A和微处理器之间采用串行接口,其接口电路和外围电路简单,占用口线少,加之它具有较高的性能价格比,因此,在微型控制器、智能仪表、控制面板和家用电器等领域中日益获得广泛的应用。 一、引脚说明与接口电路 279A的硬件电路如图1所示,它共有28个引脚。 RC引脚用于连接HD7279A的外接振荡元件,其典型值为R=1.5k?,C=15pF。RESET为复位端。该端由低电平变成高电平并保持25ms即复位结束。通常,该端接+5V即可。DIG0~DIG7分别为8个LED管的位驱动输出端。SA~SG分别为LED数码管的A段~G段的输出端。DP为小数点的驱动输出端。HD7279A片内具有驱动电路,它可以直接驱动1英吋及以下的LED数码管,使外围电路变得简单可靠。 DIG0~DIG7和SA~SG同时还分别是64键盘的列线和行线端口,完成对键盘的监视、译码和键码的识别。在8×8阵列中每个键的键码是用十六进制表示的,可用读键盘数据指令读出,其范围是00H~3FH。 HD7279与微处理器仅需4条接口线,其中CS为片选信号(低电平有效)。当微处理器访问HD7279A(读键号或写指令)时,应将片选端置为低电平。DATA为串行数据端,当向HD7279A 发送数据时,DATA为输入端;当HD7279A输出键盘代码时,DATA为输出端。CLK为数据串行传送的同步时钟输入端,时钟的上升沿表示数据有效。KEY为按键信号输出端,在无键按下时为高电平;而有键按下时此引脚变为低电平并且一直保持到键释放为止。(图1 HD7279A硬件电路图,点击下载) 二、电特性 表1所列为HD7279A的电特性。 参数符号测试条件最小值典型值最大值 电源电压Vcc/V . 4.5 5.0 5.5 工作电流Icc/mA 不接LED . 3 5 工作电流Icc/mA LED全亮, ISEG=10mA. 60 100 逻辑输入高电平Vih/V . 2.0 . 5.5 逻辑输入低电平Vil/V . 0 . 0.8 按键响应时间Tkey/ms 含去抖时间10 18 40 KEY引脚输入电流Iki/mA . . . 10 KEY引脚输出电流IKO/mA . . . 7 表 1
51单片机驱动两片74HC595级联动态驱动8位数码管
51单片机驱动两片74HC595级联动态驱动8位数码管 功能: 用2片74HC595驱动8位数码管, 级联的最低1片595控制位选,那么第一片控制段选 平台: STC89C52 现象: 8位数码管从第一位开始从0计数,满10进位 版本说明: 第0版本没有使用定时器中断,同时定义了一个unsigned long int 变量计数,再把这个数的每位分离出来显示,所以导致有点闪屏,此版本使用定时器中断,而且没有用unsigned long int 之类的变量,而是用数组Val[8] 来计数, 主函数只负责显示,其它的在中断函数里面处理,这样显示一点都不闪屏, 备注: 可以用ULN2003A 接在数码管的com 口来提高驱动能力,ULN2003A里面有7个NPN三极管, 可以大大提高驱动能力 #include <> sbit SCK = P1^1; // 数据输入时钟线,脉冲 sbit SI = P1^0; // 数据线 sbit RCK = P1^2; // 锁存 unsigned char code SMG[10] = {0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8, 0x80, 0x90}; // 段码 unsigned char code Wei[8] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80}; // 位选unsigned char Val[8] = {0}; // 要显示的数据 ************************ 函数声明************************ void interrupt_init(void); void timer_init(void); 控制74HC595输出数据 void Output(void) { RCK = 0; RCK = 1; } 向74HC595中写入一字节数据 void Write_Byte(unsigned char dat) { unsigned char i = 0; for(i=0; i<8; i++) { SCK = 0; SI = dat & 0x80;
两片74HC595级联驱动两个四连体数码管
两片74HC595级联驱动两个四连体数码管 74HC595是具有8位移位寄存器和一个存储器,三态输出功能。移位寄存器和存储器是分别的时钟。 数据在SHcp的上升沿输入,在STcp的上升沿进入的存储寄存器中去。如果两个时钟连在一起,则移位寄存器总是比存储寄存器早一个脉冲。移位寄存器有一个串行移位输入(Ds),和一个串行输出(Q),和一个异步的低电平复位,存储寄存器有一个并行8位的,具备三态的总线输出,当使能OE时(为低电平),存储寄存器的数据输出到总线。 我的硬件连接:用级联方式连接! 工作顺序:单片机先送1个8位数据到第一个595的内部移位寄存器->然后数据会送到内部的输出寄存器->输出 当MR(10引脚)为高电平,OE(13引脚)为低电平时,数据在SH CP上升沿进入移位寄存器,在ST CP上升沿输出到并行端口。 可能这还不太好理解,没关系,咱去程序应用中理解! 请看一个简单的程序: sbit SDA1 = P0^0; //串行数据输入,对应595的14脚SER sbit SCL1 = P0^1; //移位寄存器时钟输入,对应595的11脚SCK sbit SCL2 = P0^2; //存储寄存器时钟输入,对应595的12脚RCK unsigned char code duan[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90}; //0 1 2 3 4 5 6 7 8 9 unsigned char code wei[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80}; void delay2ms(void) { unsigned char i,j; for(i=133;i>0;i--) for(j=6;j>0;j--); } void 595_in(unsigned char Data) { unsigned char i; for(i = 0; i < 8; i++) //循环8次,刚好移完8位
74HC595驱动数码管上显示数字
/******************************************************************************* * 标题: 试验74HC595驱动数码管上显示数字(C语言)* 连接方法:JP12用条线冒短接JP3和JP2 用8PIN排线连接 ******************************************************************************** * 通过本例程了解74HC595(串入并出)基本原理和使用* 请学员认真消化本例程,懂74C595在C语言中的操作* ********************************************************************************/ #include
51单片机+74HC595驱动数码管程序
51单片机+74HC595驱动数码管程序 这里是电路图:完整的源码和图纸下载地址:51hei/bbs/dpj-20392-1.html 下面是51 单片机驱动74hc595 芯片的程序:#include //包含51 单片机的头文 件#include #define uint unsigned int#define uchar unsigned char//sbit sin_595 =P1;//sbit rclk_595 =P1;//sb it sclk_595 =P1 ;//sbit s_clr =P1;sb it a_cp_595 =P2; //串行移位时钟脉冲sh_cp_595sbit b_cp_595 =P2;//输出锁存器控制脉冲 st_cp_595//sbit _oe_595 =P1 ; //8 位并行输出使能/禁止(高阻态)sbit ds_595 =P2 ; //串行数据输入extern uchar datas[6]; //存放6 个数码管的显示数字uchar ledcode[]={0xC0,// 00xF9,// 10xA4,// 20xB0,// 30x99,// 40x92,// 50x82,// 60xF8,// 70x80,// 80x90,// 90x88,// A0x83,// B0xC6,// C0xA1,// D0x86,// E0x8E// F};void delay(uint z){uint t1,y;for(t1=z;t1>0;t1--)for(y=110;y>0;y--);}void led_display(void){ uchar i,j; bit testb; uchar bdata movebit[6]; uchar bdata test; //_oe_595=0; //选中数码管for(i=0;i<6;i++) movebit[i]=ledcode[datas[i]]; // P1=0; delay(1); for(i=0;i<6;i++) //数据移位{ test=movebit[i]; for(j=0;j<8;j++) { testb=test&0x80; test=test<<1; if(testb) { ds_595=1; } else {ds_595=0; }a_cp_595=1; a_cp_595=0; } //数据移位} b_cp_595=0; b_cp_595=1; b_cp_595=0;} tips:感谢大家的阅读,本文由我司收集整编。仅供参阅!
4位7段数码管驱动电路设计要求
4位7段数码管驱动电路 图1 开发板电路原理图 信号说明
1. iRST_N(异步复位) 当iRST_N信号为低时,Seg7_Driver模块中的所有寄存器异步复位为初值。 2. iCLK 模块的输入时钟40MHz。 3. iSeg_Val[15:0] 7段数码管输入二进制值,0x0~0xF iSeg_Val[15:12],左侧第一位7段数码管的值。 iSeg_Val[11: 8],左侧第两位7段数码管的值。 iSeg_Val[ 7: 4],左侧第三位7段数码管的值。 iSeg_Val[ 3: 0],左侧第四位7段数码管的值。 4. iDot_Val[3:0] 各位7段数码管小数点的显示,值为1表示显示小数点,0表示不显示小数点。 iDot_Val[3],左侧第一位7段数码管的小数点。 iDot_Val[2],左侧第两位7段数码管的小数点。 iDot_Val[1],左侧第三位7段数码管的小数点。 iDot_Val[0],左侧第四位7段数码管的小数点。 5. oDisplay[7:0] 7段数码管的数据信号。4位7段数码管共用数据信号。7段数码管为共阳极连接,各段数据线为0时,对应段发光。 6. oDis_En[3:0] 各位7段数码管的使能信号,低有效。
oDis_En[3],左侧第一位7段数码管的使能信号。 oDis_En[2],左侧第两位7段数码管的使能信号。 oDis_En[1],左侧第三位7段数码管的使能信号。 oDis_En[0],左侧第四位7段数码管的使能信号。 建议的分块: 将整个驱动电路分成Seg7_Ctrl模块与Seg7_Hex2seg模块 Seg7_Ctrl模块负责产生数码管动态显示的控制信号oDis_En的时序 Seg7_Hex2Seg模块负责将二进制值转换成数据码管显示的数据值,包括小数点的值。 注意点: 1. 动态显示过程是利用人眼的视觉残留现象来实现的,应选择适当的数码管扫描频率。可先 选择数码管的扫描显示的刷新率为125Hz(8ms),即每位数码管用2ms。 2. 完成基本功能后,可实验改变刷新率,观察数码管显示的效果,并思考原因。 3. 如果要使得数码管能够显示,A,b,C,n,o等其他字符,模块应该作怎样的修改?
数码管驱动芯片TM1620『官方最新版』
LED 驱动控制专用电路
一、 概述
TM1620
TM1620 是一种带键盘扫描接口的LED(发光二极管显示器)驱动控制专用电路,内 部集成有MCU 数字接口、数据锁存器、LED 高压驱动、键盘扫描等电路。本产品性能优 良,质量可靠。主要应用于VCR、VCD、DVD 及家庭影院等产品的显示屏驱动。
二、 特性说明
? 采用功率CMOS 工艺 ?显示模式(8 段×6 位) ? 辉度调节电路(占空比8 级可调) ? 串行接口(CLK,STB,DIN) ? 振荡方式:内置RC 振荡(450KHz+5%) ? 内置上电复位电路 ? 封装形式:SOP20
三、管脚定义:
https://www.360docs.net/doc/2211545827.html,
-1-
LED 驱动控制专用电路
四、管脚功能定义
符号 DIN 管脚名称 数据输入 说明 在时钟上升沿输入串行数据,从低位开始
TM1620
STB
片选
在上升或下降沿初始化串行接口,随后等待接收指 令。STB 为低后的第一个字节作为指令,当处理指 令时, 当前其它处理被终止。 当STB 为高时, CLK 被 忽略 在上升沿读取串行数据,下降沿输出数据 段输出(也用作键扫描),p管开漏输出 位输出,N管开漏输出 5V±10% 接系统地
CLK Seg1~Seg8 Grid1~ Grid6 VDD GND
时钟输入 输出(段) 输出(位) 逻辑电源 逻辑地
▲ 注意:DIO口输出数据时为N管开漏输出,在读键的时候需要外接1K-10K的上拉电阻。本公司推
荐10K的上拉电阻。 DIO在时钟的下降沿控制N管的动作, 此时读数时不稳定, 你可以参考图 (6) , 在时钟的上升沿读数才时稳定。
VCC
芯片内部 电路
10K
DIO
CT
GND
图(1)
五、 显示寄存器地址和显示模式:
该寄存器存储通过串行接口从外部器件传送到TM1620的数据,地址从00H-0AH共11字节单元, 分别与芯片SGE和GRID管脚所接的LED灯对应,分配如下图:
https://www.360docs.net/doc/2211545827.html,
-2-
使用74HC595实现IO口的扩展
使用74HC595实现I/O口的扩展 一、实验目的 1. 了解74HC595(串入并出)基本原理和使用 2. 了解数码管的基本原理和驱动方式 3. 学会使用74HC595来驱动静态数码管 二、实验器材 C51单片机开发板(含74HC595芯片,静态数码管)1块 8PIN排线1根 数据线1根 三、实验原理 1. 数码管 数码管是一种半导体发光器件,其基本单元是发光二极管。数码管按段数分为七段数码管和八段数码管(还有一种“米”字型的数码管,其段数更多),八段数码管比七段数码管多一个发光二极管单元(多一个小数点显示),其基本原理是:将所有LED的一端(正极、负极均可)连在一起作为一个公共端,然后通过分别控制这组LED的另一个端口来使部分LED点亮,从而达到显示一定字形的目的。 (1)数码管的分类 按能显示多少个“8”可分为1位、2位、4位等等数码管;按发光二极管单元连接方式分为共阳极数码管和共阴极数码管。共阳数码管是指将所有发光二极管的阳极接到一起形成公共阳极(COM)的数码管。共阳数码管在应用时应将公共极COM接到+5V,当某一字段发光二极管的阴极为低电平时,相应字段就点亮。当某一字段的阴极为高电平时,相应字段就不亮。。共阴数码管是指将所有发光二极管的阴极接到一起形成公共阴极(COM)的数码管。共阴数码管在应用时应将公共极COM接到地线GND上,当某一字段发光二极管的阳极为高电平时,相应字段就点亮。当某一字段的阳极为低电平时,相应字段就不亮。我们在实际使用中一定要搞清楚数码管是共阴极的还是共阳极的。 (2)数码管段、位引脚的确定(以4位8段数码管为例) 数码管引脚测量分三步:极性判断(共阳极还是共阴极)、公共端判断(位选端口)、段码端判断(段选端口)。 首先要确定数码管是共阴极还是共阳极的:找一个3到5V的直流电源,准备几个1K或者几百欧姆的电阻。将电源的正极串接一个电阻后连在数码管的任意一个脚上,然后将电源的负极逐个接到数码管的其余引脚上,观察数码管的某一段是否会点亮,如果全部引脚试过都没有亮的,那么将电源正极(串电阻)换一个引脚再试,直到有一个LED发光,这时固定电源负极不动,电源正极(串电阻)逐个接到数码管的其余引脚上,如果有8段LED都亮,说明该数码管是共阴极的。相反,按住电源正极不动,电
驱动数码管程序
//GPIO define //FUNCTION:用595完成八位数码管显示 -------------------------------------------------------------------------- */ #include
74HC595介绍及头文件讲解
74HC595是美国国家半导体公司生产的通用移位寄存器芯片。并行输出端具有输出锁存功能。与单片机连接简单方便,只须三个I/O口即可。而且通过芯片的Q7引脚和SER引脚,可以级联。 595引脚介绍 ________ QB--|1 16|--Vcc QC--|2 15|--QA QD--|3 14|--SER-------------------串行输入 QE--|4 13|--/G---------------------使能端输出有效(低电平) QF--|5 12|--RCK-------------------存储寄存器时钟输入 QG--|6 11|--SCK-------------------移位寄存器时钟输入 QH--|7 10|--/SCLR----------------主复位(低电平) GND-|8 9|--QH'--------------------串行输出端 |________| 74595的数据端: 1)、QA--QH: 八位并行输出端,可以直接控制数码管的8个段。 2)、QH': 级联输出端。我将它接下一个595的SER端。 3)、SER: 串行数据输入端。 74595的控制端说明: 1) 、/SCLR(10脚): 低点平时将移位寄存器的数据清零。通常我将它接Vcc。 2)、SCK(11脚):上升沿时数据寄存器的数据移位。QA-->QB-->QC-->...-->QH;下降沿移位寄存器数据不变。(脉冲宽度:5V时,大于几十纳秒就行了。我通常都选微秒级) 3)、RCK(12脚):上升沿时移位寄存器的数据进入数据存储寄存器,下降沿时存储寄存器数据不变。通常我将RCK置为低电平,当移位结束后,在RCK端产生一个正脉冲(5V时,大于几十纳秒就行了。我通常都选微秒级),更新显示数据。 4)、/G(13脚): 高电平时禁止输出(高阻态)。如果单片机的引脚不紧张,用一个引脚控制它,可以方便地产生闪烁和熄灭效果。比通过数据端移位控制要省时省力。 注:74164和74595功能相仿,都是8位串行输入转并行输出移位寄存器。74164的驱动电流(25mA)比74595(35mA)的要小,14脚封装,体积也小一些。 74595的主要优点是具有数据存储寄存器,在移位的过程中,输出端的数据可以保持不变。这在串行速度慢的场合很有用处,数码管没有闪烁感。 与164只有数据清零端相比,595还多有输出端时能/禁止控制端,可以使输出为高阻态。 程序讲解: //Note: 74HC595驱动 //File: 74HC595.H //Date: 08-7-16 //Time: 8:50 // ______ __ //Note: SCLR(10脚)主复位接电源正极, G(13脚)使能端,输出有效接电源负极 //防止74HC595.H头文件被主程序重复调用 /*--------------------------------------------*/ #ifndef __74HC595_H__ #define __74HC595_H__
LED数码管驱动显示实验
LED数码管驱动显示实验 实验内容: 1、八字段LED数码管驱动显示工作原理 2、74LS138三—八译码器工作原理及如何控制数码管工作原理 3、数码管动态显示工作原理分析与计算 4、数码管多种显示实验 实验讲义: 一、七字段数码管显示工作原理 共阴级接法 共阳级接法
详情分析可以启动51单片机工具箱软件,选择“数码管字形”生成选项进行字形分析。 二、74LS138三—八译码器工作原理及如何控制数码管工作原理
注:上图是工程样品图。实际修改后的电路板图将接入9012三极管的Y0-Y7顺序改为Y7-Y0 三、数码管驱动方式及动态显示工作原理分析与计算 1、人眼的视觉暂留现象 数码管要正常显示,就要用驱动电路来驱动数码管的各个段码,从而显示出我们要的数字,因此根据数码管的驱动方式的不同,可以分为静态式和动态式两类。 ①静态显示驱动:静态驱动也称直流驱动。静态驱动是指每个数码管的每一个段码都由一个单片机的I/O端口进行驱动,或者使用如BCD码二-十进制译码器译码进行驱动。静态驱动的优点是编程简单,显示亮度高,缺点是占用I/O端口多,如驱动5个数码管静态显示则需要5×8=40根I/O端口来驱动,要知道一个89S52单片机可用的I/O端口才32个呢:),实际应用时必须增加译码驱动器进行驱动,增加了硬件电路的复杂性。 ②动态显示驱动:数码管动态显示接口是单片机中应用最为广泛的一种显示方式之一,动态驱动是将所有数码管的8个显示笔划"a,b,c,d,e,f,g,dp"的同名端连在一起,另外为每个数码管的公共极COM增加位选通控制电路,位选通由各自独立的I/O线控制,当单片机输出字形码时,所有数码管都接收到相同的字形码,但究竟是那个数码管会显示出字形,取决于单片机对位选通COM端电路的控制,所以我们只要将需要显示的数码管的选通控制打开,该位就显示出字形,没有选通的数码管就不会亮。通过分时轮流控制各个数码管的的COM 端,就使各个数码管轮流受控显示,这就是动态驱动。在轮流显示过程中,每位数码管的点亮时间为1~2ms,由于人的视觉暂留现象及发光二极管的余辉效应,尽管实际上各位数码管并非同时点亮,但只要扫描的速度足够快,给人的印象就是一组稳定的显示数据,不会有闪烁感,动态显示的效果和静态显示是一样的,能够节省大量的I/O端口,而且功耗更低。 2、数码管使用的电流与电压计算 电流:静态时,推荐使用10-15mA;动态时,16/1动态扫描时,平均电流为4-5mA,峰值电流50-60mA。 电压:查引脚排布图,看一下每段的芯片数量是多少?当红色时,使用1.9V乘以每段的芯片串联的个数;当绿色时,使用2.1V乘以每段的芯片串联的个数。 四、数码管显示实验 利用3-8译码器来选择需要显示(亮)哪个数码管,利用P0口来负责显示什么数字或符号 1、让Y0所对应的数码管显示“0”—“9”,间隔1秒 2、让Y0所对应的数码管显示“0”,Y1显示“1”,Y2显示“2”…………以此类推最后Y7显示“7”,间隔1秒
数码管按键驱动芯片
//***************************************************************************** *************************************************** //TM1639.h //数码管和按键驱动芯片TM1639函数借口和芯片操作相关宏定义 //***************************************************************************** *************************************************** #ifndef _TM1639_H #define _TM1639_H //位使能 #define DIG0 0xc0 #define DIG1 0xc2 #define DIG2 0xc4 #define DIG3 0xc6 #define DIG4 0xc8 #define DIG5 0xca #define DIG6 0xcc #define DIG7 0xce //显示亮度级别 #define LEVEL_OFF 0x80 #define LEVEL_1 0x88 #define LEVEL_2 0x89 #define LEVEL_4 0x8a #define LEVEL_10 0x8b #define LEVEL_11 0x8c #define LEVEL_12 0x8d #define LEVEL_13 0x8e #define LEVEL_14 0x8f //初始化IC端口 void InitTM1639(); //连续传送多个数据 void SeriesInData (unsigned char starAddr,unsigned char *data,unsigned char loop,unsigned char level); //传送一个数据(本质是连续模式) void OneByteInData(unsigned char starAddr,unsigned char *data,unsigned char level); //清楚所有显示数据 void ClearAll(); //读取按键键值 void KeyRead(int *key); //测试模式,内部使用,检验硬件完整性
(完整版)595驱动数码管
器件:74hc595. 引脚说明: SDA:数据输入口。 SH_CP:数据输入控制端,在每个SH_CP的上升沿, SDA口上的数据移入寄存器, 在SH_CP的第9个上升沿, 数据开始从QS移出。 ST_CP:数据置入锁存器控制端。 Q0~Q7:数据并行输出端。 数据从SDA 口送入74HC595 , 在每个SH_CP的上升沿, SDA口上的数据移入寄存器, 在SH_CP的第9个上升沿, 数据开始从QS 移出。如果把第一个74HC595的QS和第二个74HC595 的SDA 相接, 数据即移入第二个74HC595中,照此一个一个接下去, 可接任意多个。数据全部送完后, 给ST_CP一个上升沿, 寄存器中的数据即置入锁存器。此时如果EN 为低电平, 数据即从并口Q0~Q7输出, 把Q0~Q7 与LED的8 段相接, LED就可以实现显示了。要想软件改变LED的亮度, 只需改变EN的占空比就行了。 实验原理及内部结构:
如图所示: 74HC595 内含8 位串入、串/并出移位寄存器和8位三态输出锁存器。 寄存器和锁存器分别有各自的时钟输入(SH_CP和ST_CP) , 都是上升沿有效。 当SH_CP从低到高电平跳变时,串行输入数据(SDA) 移入寄存器; 当ST_CP从低到高电平跳变时, 寄存器的数据置入锁存器。 清除端(CLR) 的低电平只对寄存器复位(QS 为低电平) ,而对锁存器无影响。 当输出允许控制(EN) 为高电平时, 并行输出(Q0~Q7) 为高阻态, 而串行输出(QS) 不受影响。 74HC595 最多需要5 根控制线,即SDA、SH_CP、ST_CP、CLR 和EN。其中CLR 可以直接接到高电平, 用软件来实现寄存器清零; 如果不需要软件改变亮度, EN可以直 接接到低电平, 而用硬件来改变亮度。把其余三根线和单片机的I/ O 口相接, 即可实现对LED 的控制。数据从SDA 口送入74HC595 ,在每个SH_CP的上升沿, SDA 口上的数据移入寄存器, 在SH_CP的第9个上升沿, 数据开始从QS 移出。如果把第一个 74HC595 的QS和第二个74HC595 的SDA 相接, 数据即移入第二个74HC595 中, 照此一个一个接下去, 可接任意多个。数据全部送完后, 给ST_CP 一个上升沿,寄存器中的数据即置入锁存器。此时如果EN 为低电平, 数据即从并口Q0~Q7 输出, 把Q0~Q7 与LED 的8 段相接, LED就可以实现显示了。要想软件改变LED 的亮度, 只需改变EN 的占空比就行了。。LED 的亮度用PR1~PR3 的阻值来控制。P1 口的P115 、P116 、P117 用来控制LED 的显示,分别接到ST_CP、SH_CP和SDA 脚。 实验内容: 按下图连接器件:
51单片机驱动74HC595的编程及使用要点
74595外形图 ______ QB--|1 16|--Vcc QC--|2 15|--QA QD--|3 14|--SI QE--|4 13|--/G QF--|5 12|--RCK QG--|6 11|--SCK QH--|7 10|--/SCLR GND-|8 9|--QH' |_____| 74595的数据端: QA--QH: 八位并行输出端,可以直接控制数码管的8个段。 QH': 级联输出端。我将它接下一个595的SI端。 SI: 串行数据输入端。 74595的控制端说明: /SCLR(10脚): 低点平时将移位寄存器的数据清零。通常我将它接Vcc。 SCK(11脚):上升沿时数据寄存器的数据移位。QA-->QB-->QC-->...-->QH;下降沿移位寄存器数据不变。(脉冲宽度:5V时,大于几十纳秒就行了。我通常都选微秒级) RCK(12脚):上升沿时移位寄存器的数据进入数据存储寄存器,下降沿时存储寄存器数据不变。通常我将RCK置为低点平,当移位结束后,在RCK端产生一个正脉冲(5V时,大于几十纳秒就 行了。我通常都选微秒级),更新显示数据。 /G(13脚): 高电平时禁止输出(高阻态)。如果单片机的引脚不紧张,用一个引脚控制它,可以方便地产生闪烁和熄灭效果。比通过数据端移位控制要省时省力。 注1)74164和74595功能相仿,都是8位串行输入转并行输出移位寄存器。74164的驱动电流(25mA)比74595(35mA)的要小,14脚封装,体积也小一些。 2)74595的主要优点是具有数据存储寄存器,在移位的过程中,输出端的数据可以保持不变。这在串行速度慢的场合很有用处,数码管没有闪烁感。3)595是串入并出带有锁存功能移位寄存器,
数码管的使用方法
数码管的使用方法 一、工作原理 数码管是一种半导体发光器件,其基本单元是发光二极管。能显示4位数字的叫四位数码管,当然也有多位和只有一位的数码管,他们的电气原理相同。数码管按段数分为七段数码管和八段数码管,八段数码管比七段数码管多一个发光二极管单元(多一个小数点显示);按发光二极管单元连接方式分为共阳极数码管和共阴极数码管。共阳数码管是指将所有发光二极管的阳极接到一起形成公共阳极(COM)的数码管。共阳数码管在应用时应将公共极COM接到+5V,当某一字段发光二极管的阴极为低电平时,相应字段就点亮。当某一字段的阴极为高电平时,相应字段就不亮。共阴数码管是指将所有发光二极管的阴极接到一起形成公共阴极(COM)的数码管。共阴数码管在应用时应将公共极COM接到地线GND上,当某一字段发光二极管的阳极为高电平时,相应字段就点亮。当某一字段的阳极为低电平时,相应字段就不亮。
二、电气特性 单位数码管有十个管脚,其中有8根是用来点亮a,b,c,d,e,f,dp 共8个发光二极管(原理中有介绍),3,8两个管脚为公共COM脚,它们相连通且作用相同,可接任意一根。为了更清楚介绍,贴图如下: 三、驱动方式 静态驱动也称直流驱动。静态驱动是指每个数码管的每一个段码都由一个单片机的I/O端口进行驱动,或者使用如BCD码二-十进制译码器译码进行驱动。静态驱动的优点是编程简单,显示亮度高,缺点是占用I/O端口多,如驱动5个数码管静态显示则需要5×8=40根I/O端口来驱动,要知道一个89S51单片机可用的I/O端口才32个呢:),实际应用时必须增加译码驱动器进行驱动,增加了硬件电路的复杂性。 数码管动态显示接口是单片机中应用最为广泛的一种显示方式之一,动态驱动是将所有数码管的8个显示笔划"a,b,c,d,e,f,g,dp"的同名端连在一起,另外为每个数码管的公共极COM增加位选通控制电路,位选通由各自独立的I/O线控制,当单片机输出字形码时,所有数码管都接收到相同的字形码,但究竟是那个数码管会显示出字形,取决于单片机对位选通COM端电路的控制,所以我们只要将
74HC595实现多位LED显示的方法
74HC595实现多位LED显示的方法 单片机应用系统中使用的显示器主要有LED和LCD两种。近年来也有用CRT显示的。前者价格低廉,配置灵活,与单片机接口方便;后者可进行图形显示,但接口较复杂,成本也较高。LED(Ling Emiting Diode)是发光二极管的缩写。实际应用非常普遍的是八段LED显示器。LED显示器在大型报时屏幕,银行利率显示,城市霓虹灯建设中,得到广泛应用。在这些需要多位LED显示的场合,怎样实现系统稳定,价格低廉的显示,成为决定其成本的关键所在。 2 74HC595实现LED静、动态显示基本原理 74HC595是美国国家半导体公司生产的通用移位寄存器芯片。并行输出端具有输出锁存功能。与单片机连接简单方便,只须三个I/O口即可。而且通过芯片的Q7引脚和SER引脚,可以级联。而且价格低廉. 2.1 静态显示 每位LED显示器段选线和74HC595的并行输出端相连,每一位可以独立显示(见图1)。在同一时间里,每一位显示的字符可以各不相同(每一位由一个74HC595的并行输出口控制段选码)。 N位LED显示要求N个74HC595芯片及N+3条I/O口线,占用资源较多,而且成本较高。这对于多位LED显示很不利。 2.2 动态显示 在多位LED显示时,为了简化电路,降低成本,节省系统资源,将所有的N位段选码并联在一起,由一片74HC595控制(见图2)。由于所有LED的段选码皆由一个74HC595并行输
出口控制,因此,在每一瞬间,N位LED会显示相同的字符。想要每位显示不同的字符,就必须采用扫描的方法,即在每一瞬间只使用一位显示字符。在此瞬间,74HC595并行输出口输出相应字符段选码,而位选则控制I/O口在该显示位送入选通电平,以保证该位显示相应字符。如此轮流,使每位分时显示该位应显示字符。由于74HC595具有锁存功能,而且串行输入段选码需要一定时间,因此,不需要延时,即可形成视觉暂留效果。 N位LED显示时,只需要一片74HC595即可完成,成本最低。但是,此种方法的最大弱点就是当LED的位数大于12位时,出现闪烁现象,这是所有动态LED显示方式共同的弱点。 3 多位LED显示方法的实现 74HC595具有一个8位串行输入并行输出的移位寄存器和一个8位输出锁存器。 ;================================================ ;74HC595 走马灯演示程序 ;================================================ SDATA_595 EQU P1.0 ;串行数据输入 SCLK_595 EQU P1.1 ;移位时钟脉冲 RCK_595 EQU P1.2 ;输出锁存器控制脉冲 ;================================================ ORG 0000H LJMP MAIN ORG 0030H ;================================================ MAIN: MOV SP,#60H MOV R0,#0FEH MAIN1: CALL OUT_595 CALL DELAY MOV A,R0 RL A MOV R0,A JMP MAIN1 ;--------------------------------------------------------------- ;输出锁存器输出数据子程序 ;--------------------------------------------------------------- OUT_595: LCALL WR_595 CLR RCK_595