双足机器人制作及其步态运行
双足机器人制作及其步态运行
一、实验目的
1 . 掌握实验室设备使用方法
2 . 学会AutoCAD知识并运用以及学习arduino单片机的基本开发
3 . 了解双足机器人平衡控制方法。
二、原理说明
1.Arduino使用说明
Arduino是一款便捷灵活、方便上手的开源电子原型平台。包含硬件(各种型号的Arduino板)和软件(Arduino IDE)。它构建于开放原始
码simple I/O介面版,并且具有使用类似Java、C语言的
Processing/Wiring开发环境。主要包含两个主要的部分:硬件部分是可
以用来做电路连接的Arduino电路板;另外一个则是Arduino IDE,你的
计算机中的程序开发环境。你只要在IDE中编写双足步态程序代码,将
程序上传到Arduino电路板后,程序便会告诉Arduino电路板要做怎样
的步态运行。
2 . 双足步态算法
双足机器人平衡控制方法其中的“静态步行”(static walking),这种方法是在机器人步行的整个过程中,重心(COG,Center of Gravity)在机器人底部水平面的投影一直处在不规则的支撑区域(support region)内,这种平衡控制方法的好处是整个机器人行走的过程中,保证机器人
稳定行动,不会摔倒。但是这个平衡控制方法缺点是行动速度非常缓慢
(因为整个过程中重心的投影始终位于支撑区域)。另一种使用的平衡
控制方法是“动态步行”(dynamic walking),在这个控制方法中机器
人的步行速度得到了极大的飞跃,显而易见,在得到快速的步行速度同
时,机器人很难做到立即停止。从而使得机器人在状态转换的过程中显
现不稳定的状态,为了避免速度带来的影响。零力矩点(ZMP)被引入
到这个控制策略中,在单脚支撑相中,引入ZMP=COG。引入ZMP的好
处在于,如果ZMP严格的存在于机器人的支撑区域中,机器人绝不摔倒。
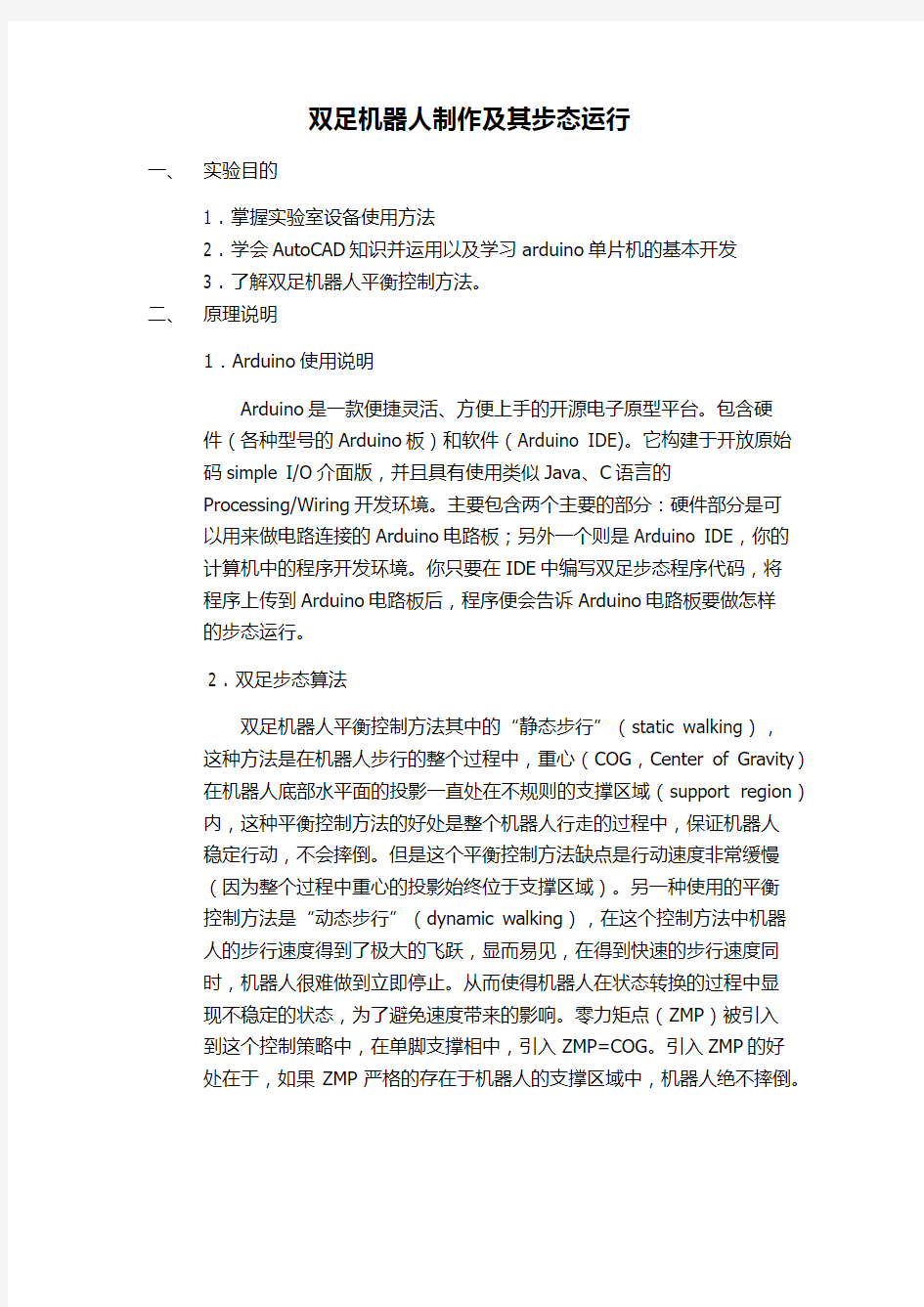
基于上述内容,可将机器人的一条腿抽象为上图。
正向ZMP动力学公式如上图
X ZMP代表正向ZMP,X mc代表质量中心前进的位移,l是倒立摆的长度,g是重力加速度。
三、实验设备
四、实验内容
1.Autodesk Computer Aided Design绘制样图
上图为双足机器人脚部以及腿部,下图为头部
https://www.360docs.net/doc/2e4053007.html,ser cutting machine非金属切割
从激光器发射出的激光,经光路系统,聚焦成高功率密度的激光束。激光束照射到亚克力板表面,使亚克力板达到熔点或沸点,同时与光束同轴的高压气体将熔化或气化金属吹走。随着光束与亚克力板相对位置的移动,最终使材料形成切缝,从而达到切割的目的。学习使用切割机,将亚克力板放入激光切割器。应用激光聚焦后产生的高功率密度能量来实现的。在计算机的控制下,通过脉冲使激光器放电,从而输出受控的重复高频率的脉冲激光,形成一定频率,一定脉宽的光束,该脉冲激光束经过光路传导及反射并通过聚焦透镜组聚焦在加工物体的表面上,形成一个个细微的、高能量密度光斑,焦斑位于待
加工面附近,以瞬间高温熔化或气化被加工材料。每一个高能量的激光脉冲瞬间就把物体表面溅射出一个细小的孔,在计算机控制下,激光加工头与被加工材料按预先绘好的图形进行连续相对运动打点,这样就会把亚克力板加工成想要的形状。
下面为激光切割机相关参考数据:
X,Y工作范围:1300mm*2500mm
切割聚焦镜头:F=80mm
最大激光输出功率:500W
调继冲频率:$300Hz
电源脉冲宽度:0.5ms-2ms
激光器:双灯镀金聚光腔
切割接口卡:CNC 3000控制卡
切割软件:适应PLT,DXF等格式
制冷功率:4W
重复定位精度:±0.03/300mm
空程速度:0-20000mm/min
切割速度:0-15000mm/min
3.组装双足机器人
将双足机器人组成零件从切割好后的亚克力板下拆卸下来,按照双足机器人结构拼接起来,关节处使用规格正确的螺丝螺母,拼接处利用1203瞬干胶-氰基丙烯酸乙酯强力瞬间接着剂粘结。
将MG 90S型号舵机放入模型中,用相关螺丝进行对接。MG 90S自带杜邦线,将arduino Nano用胶枪固定在双足机器人头部平面处。将六个MG 90S舵机线分别插入arduino Nano 的PWM3、PWM5、PWM6、PWM9、PWM10、PWM11引脚。
4.Arduino IDE编写程序控制双足步态
arduino控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等的脉冲,这些脉冲来代替正弦波或所需要的波形。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的
等值电压为正弦波形,所获得的输出平滑且低次谐波少。按一定的规则对各脉冲的宽度进行调制,即可改变逆变电路输出电压的大小,也可改变输出频率。例如,把正弦半波波形分成N等份,就可把正弦
半波看成由N个彼此相连的脉冲所组成的波形。这些脉冲宽度相等,都等于∏/n ,但幅值不等,且脉冲顶部不是水平直线,而是曲线,
各脉冲的幅值按正弦规律变化。如果把上述脉冲序列用同样数量的等幅而不等宽的矩形脉冲序列代替,使矩形脉冲的中点和相应正弦等分的中点重合,且使矩形脉冲和相应正弦部分面积(即冲量)相等,就得到一组脉冲序列,这就是PWM波形。可以看出,各脉冲宽度是按正弦规律变化的。根据冲量相等效果相同的原理,PWM波形和正弦
半波是等效的。对于正弦的负半周,也可以用同样的方法得到PWM
波形。
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的
方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给
定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。
多数负载(无论是电感性负载还是电容性负载)需要的调制频率高于10Hz,通常调制频率为1kHz到200kHz之间。
许多微控制器内部都包含有PWM控制器。例如,Microchip公司的PIC16C67内含两个PWM控制器,每一个都可以选择接通时间和
周期。占空比是接通时间与周期之比;调制频率为周期的倒数。执行PWM操作之前,这种微处理器要求在软件中完成以下工作:
1、设置提供调制方波的片上定时器/计数器的周期
2、在PWM控制寄存器中设置接通时间
3、设置PWM输出的方向,这个输出是一个通用I/O管脚
4、启动定时器
5、使能PWM控制器
如今几乎所有市售的单片机都有PWM模块功能,若没有(如早期的8051),也可以利用定时器及GPIO口来实现。更为一般的
PWM模块控制流程为(笔者使用过TI的2000系列,AVR的Mega
系列,TI的LM系列):
1、使能相关的模块(PWM模块以及对应管脚的GPIO模块)。
2、配置PWM模块的功能,具体有:
①:设置PWM定时器周期,该参数决定PWM波形的频率。
②:设置PWM定时器比较值,该参数决定PWM波形的占空比。
③:设置死区(deadband),为避免桥臂的直通需要设置死区,一般较高档的单片机都有该功能。
④:设置故障处理情况,一般为故障是封锁输出,防止过流损坏功率管,故障一般有比较器或ADC或GPIO检测。
⑤:设定同步功能,该功能在多桥臂,即多PWM模块协调工作时尤为重要。
3、设置相应的中断,编写ISR,一般用于电压电流采样,计算
下一个周期的占空比,更改占空比,这部分也会有PI控制的功能。
4、使能PWM波形发生。
首先编入头文件,对MG 90S进行定义,编写setup函数。接下来根据步态编写。
定义双足站立值:
void startt()
{
zd.write(a);
zx.write(b);
zj.write(c);
yx.write(e);
yj.write(f);
}
按照上面站立程序,调试双足的站立数值并填入表格。
void first()
{
yj.write(a);
yx.write(b);
yd.write(c);
delay(d);
zd.write(e);
zx.write(f);
yd.write(j);
delay(k);
yj.write(l);
yx.write(m);
delay(n);
zd.write(o);
zx.write(p);
delay(q);
yj.write(r);
yx.write(s);
}
上面为双足机器人第一步程序,调试双足的第一步数值并填入下面表格。
void second()
{
zd.write(a);
zx.write(b);
delay(c);
yj.write(d);
yx.write(e);
delay(g);
}
上面为双足机器人第二步程序,调试双足的第二步数值并填入下面表格。
{
yj.write(a);
yx.write(b);
yd.write(c);
delay(d);
zd.write(e);
zx.write(f);
yd.write(j);
delay(k);
yj.write(l);
yx.write(m);
delay(n);
zd.write(o);
zx.write(p);
delay(q);
yj.write(r);
yx.write(s);
}
上面为双足机器人第一步程序,调试双足的第三步数值并填入下
循环:
void loop()
{
second();
third();
}
5.运行
五、实验注意事项
1.在采用脉冲穿孔的情况下,为了获得高质量的切口,从工件静止时的脉
冲穿孔到工件等速连续切割的过渡技术应以重视。从理论上讲通常可
改变加速段的切割条件:如焦距、喷嘴位置、气体压力等,但实际上
由于时间太短改变以上条件的可能性不大。在工业生产中主要采用改
变激光平均功率的办法比较现实,具体方法有以下三种:
(1)改变脉冲宽度;
(2)改变脉冲频率;
(3)同时改变脉冲宽度和频率。
实际结果表明,第(3)种效果最好。
2.使用激光切割亚克力板,将激光对准亚克力右上角,预先测一下,看
看是否超过X,Y工作范围:1300mm*2500mm。
3.双足拼接时,一定使各个零件互相垂直,拼接偏斜会导致双足站立不
稳,行走不稳定。
4.单片机工作的三个条件分别是电源、时钟晶振、复位。当单片机不能
正常工作时,我们首先就要检查这三个条件,用电压表或者万用表检
测他的电源和接地脚,检测两个引脚之间的电压是不是5V左右;对
于时钟晶体振荡有没有正常工作,我们最好用示波器进行检测,看能
否检测到相应频率的正弦波脉冲。
六、预习思考题
1.根据原理试试如何控制方向偏转。
2.当单片机不能正常工作时,我们首先就要检查这三个条件,三个条件
分别是电源、时钟晶振、复位。复位如何检测?
3.如何用程序使运行中双足机器人转换为站立状态。
七、实验报告
1.讨论和分析零力矩点(ZMP)在这个双足控制策略中的优缺点。
2.分析双足如何顺利前行。
【外文翻译】双足机器人上楼梯的步态规划
双足机器人上楼梯的步态规划 Zhang Qin, Fan Chang-xiang and Yao Tao School of Mechanical and Automotive Engineering South China University of Technology Guang zhou, Guangdong Province, China zhangqin@https://www.360docs.net/doc/2e4053007.html, Yoshitsugu Kamiya Department of Mechanical Systems Engineering Kanazawa University Kanazawa, Japan kamiya@t.kanazawa-u.ac.jp 【摘要】上楼梯是双足机器人的一种基本动作。一个有效的算法对双足步行的稳定性是至关重要的。在本文中,我们以双足机器人爬楼梯为例,提出一个基于重复变换法(RDK)的算法来规划上楼梯动作和前向运动。在本文提出的算法中,为了满足上楼梯的稳定性,机器人通过上身来调整质心的位置,并且由重复变换法(RDK)进行计算和修正。重复变换法的作用是有保证性的,其可行性和有效性已经通过双足机器人上楼梯仿真实验的验证;而本文提出的算法也适用于双足机器人下楼梯。 【索引词】双足机器人;上楼梯;重复变换法;重心运动; 1.介绍 双足机器人和人类一样拥有多自由度的特点,每一个关节可以通过巧妙的组合从而可以完成各种动作。而且双足机器人对环境具有良好的适应性,并能进入相对狭窄空间替代人类执行各种操作,所以它们具有广阔的应用前景。上下楼梯只是双足机器人具有的基本功能。而建立机器人的运动学模型,分析其上下楼梯的过程,并研究其步态规划方法,是实现双足机器人稳定的步态非常重要的保证。 一些目前的研究成果已经计算出双足机器人的上下楼梯的步态规划。如Yusuke Sugahara以及其他人提出通过调整腰部关节的角度和预先设置的零点力矩(ZMP)轨迹来设计机器人的步态规划方法爬楼梯。而Jeon以及其他人通过四项多项式计算关节的运动轨迹,并优化的机器人上下楼所需的最小能耗,实现机器人上楼梯的步态规划。Eun-Su等人则通过优化多项式参数与动态加密算法和自适应遗传算法,并且结合低阶多项式来计算各关节的运动轨迹,最后研究轴承扭矩和能源消耗和ZMP,直至机器人能稳定上下楼梯从而规划机器人的上楼梯轨迹。Song Xian-xi等学者利用踝关节的运动轨迹,并调整踝关节的旋转角与利用模糊控制算法使ZMP的位置接近支撑区域的中心,实现机器人稳定上楼梯的步态规划。除此之外,其他一些国际和国内学者也做了相关研究关于双足机器人的上下楼梯或上下斜坡的步态规划。上面的算法主要是基于关节轨迹的预先计算,然后通过模糊控制算法或遗传算法优化步态等,这些算法相当复杂,因为计算量是非常巨大的,而且处理时间非常长。
智能化机器人设计说明书
机械装备设计制造综合技能大赛 设 计 说 明 书 姓名:孙小平洪耀林徐海昌 指导老师:黄伟玲 2014年9月17日 江西·赣州
摘要 随着计算机技术,人工智能技术的迅速发展以及智能采集器的不断改进和推陈出新,智能信息采集装置已经取得了很大进展。但是对于应用比较复杂通用性较高的全自动信息采集车还没有突破性的进展。智能数据信息采集车的研究将会告别信息相互孤立缺乏联动性的现象,是一个复杂的,面向智能化的,不断发现的过程。近年来,很多关于信息采集的研究和设计,尤其是智能数据信息采集车更是吸引了很多人的眼球。对于智能信息采集车来说,不但要有环境信息获取功能,还要有对信息理解和信息处理的功能。对自动信息采集车的研究是针对环境空间的识别,然后建立相应数据通道,通过雷达和无线装置把获取的数据传送到终端。 智能信息采集车采用了应用范围广,性价比高的基于单片机的多数据通道采集系统,将来自传感器的信号通过转换器转换为数字信号后由单片机采集然后利用SPI通信将数据送到主机进行数据的存储后期处理与显示实现数据处理功能强大的智能化高端信息采集设备。 智能数据信息采集车是一个集自动驾驶、环境感知、规划决策等功能于一体的综合系统。它集中的运用了人工智能、导航、传感器及自动控制等技术;应用了计算机、信息传递、通信交流等现代装备,是典型的高新技术综合体。 关键词:智能信息采集车、智能化、传感器、数据通道、现代装备
第一章绪论 (1) 1.1 信息采集的现状及发展概述 (1) 1.2信息采集车国内外研究现状 (2) 1.3智能信息采集车的背景意义 (4) 1.4 设计要求及内容 (6) 第二章智能信息采集车的结构与工作原理 (6) 2.1 数据获取装置的设计 (6) 2.2 行走方案选择 (7) 2.3基本结构 (9) 2.4工作原理 (11) 第三章智能信息采集车的功能与特点 (12) 3.1 智能信息采集车的功能 (12) 3.2智能信息采集车的特点 (13) 第四章智能信息采集车的设计思路 (15) 4.1 基本工作思路 (15) 4.2动力选择思路 (15) 4.3设计后的调整 (16) 第五章总结与展望 (17) 参考文献 (18)
双足步行机器人设计及运动控制
目录 第1章序言 (2) 1.1 双足机器人现状 (2) 1.2 技能综合训练意义 (2) 1.3 技能训练的内容 (2) 第2章元件选择、结构设计 (3) 2.1元件选择 (3) 2.2结构设计三维设计图 (4) 2.2.1零件三位模型以及装配 (4) 2.2.2装配三维模型 (7) 第3章控制系统设计 (10) 第4章系统软件编程与仿真 (12) 第5章结论...................................................................... 错误!未定义书签。参考文献 (17)
第1章序言 1.1双足机器人现状 随着世界第一台工业机器人1962年在美国诞生,机器人已经有了三十多年的发展史。三十多年来,机器人由工业机器人到智能机器人,成为21世纪具有代表性的高新技术之一,其研究涉及的学科涵盖机械、电子、生物、传感器、驱动与控制等多个领域。 世界著名机器人学专家,日本早稻田大学的加藤一郎教授说过:“机器人应当具有的最大特征之一是步行功能。”双足机器人属于类人机器人,典型特点是机器人的下肢以刚性构件通过转动副联接,模仿人类的腿及髋关节、膝关节和踝关节,并以执行装置代替肌肉,实现对身体的支撑及连续地协调运动,各关节之间可以有一定角度的相对转动。 双足机器人不仅具有广阔的工作空间,而且对步行环境要求很低,能适应各种地面且具有较高的逾越障碍的能力,其步行性能是其它步行结构无法比拟的。研究双足行走机器人具有重要的意义 1.2技能综合训练意义 技能训练是在学生修完除毕业设计外全部理论和时间课程以后的一次综合性时间教学环节,其目的和意义在于: 通过技能训练,了解机器人机构及控制系统设计的基础知识; 掌握机器人系统中元部件的正确选择方法和特性参数的确定; 培养学生对所学知识的综合应用,理论联系实际的能力; 培养学生的动手能力和实际操作能力; 1.3技能训练的内容 1、主要内容: 1)、机器人结构设计; 2)、控制系统软硬件设计与仿真; 3)、八自由度机器人运动控制。 2、训练形式 学生以小组为单位,集体讨论确定整体方案;指导教师给出实训方向,技术指标等,协助学生完成训练任务。
工业机器人课程设计
河南机电高等专科学校《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 扣号: 姓名:流星 2014 年 10 月 1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15) 一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一
步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,利用限位开关来保护电机和控制机械手位置的准停。 这个课题可以充分的体现机电一体化的由程序自动控制机械结构的运动,对自己以前的所学的课程也是一种巩固。另一方面这个机械手可以实现一定的搬运功能具有很强的实用性能。 2、发展现状和趋势
关于双足机器人的设计与研究
关于双足机器人的设计与研究 引言 机器人是一门综合性很强的学科,有着极其广泛的研究和应用领域。机器人技术是综合计算机技术、信息融合技术、机构学、传感技术、仿生科学以及人工智能等多学科而形成的高新技术,它不仅涉及到线性、非线性、基于多种传感器信息控制以及实时控制技术,而且还包括复杂机电系统的建模、数字仿真技术及混合系统的控制研究等方面的技术。 仿人形机器人是机器人技术中的一个重要研究课题,而双足机器人是仿人形机器人研究的前奏。步行技术是人与大多数动物所具有的移动方式,是一种高度自动化的运动,双足步行系统具有非常复杂的动力学特性,具有很强的环境适应性。相对轮式、履带式机器人,它具有无可比拟的优越性,可进入狭窄的作业空间,也可跨越障碍、上下台阶、斜坡及在不平整的地面上工作,以及护理老人、康复医学和一般家庭的家政服务。另一方面,由于双足机器人具有多关节、多驱动器和多传感器的特点,而且一般都具有冗余的自由度,这些特点对其控制问题带来很大难度,为各种控制和优化方法提供理想的实验平台,使其成为一个令人瞩目的研究方向,因此对双足步行机器人行走规划机器控制的研究不仅具有很高的学术价值,而且具有一定的现实意义。 以小型双足机器人的设计为重点,介绍一款小型双足机器人的设计,包括自由度配置,动力源核材料选择,并针对所设计的机器人进行静态步行规划。 1 小型双足机器人本体设计作为一种双足机器人研究平台,要求所设计的机器人能够满足研究者对双足机器人的基本要求,即机器人具备稳定行走的能力,为研究双足机器人的行走方法步态规划提供平台。图1为所设计的双足机器人的平面图。机器人共有18个自由度,头部的前方和左右两侧都装有超声波传感器,用来检测障碍物,头顶装有声敏传感器,用来检测声音。 1.1 机器人自由度配置
迎宾机器人设计
1引言 1.1设计目的 机器人可以干人不愿意干的事,把人从有毒的、有害的、高温的或危险的,这样的环境中解放出来,同时机器人可以干不好干的活,比方说在汽车生产线上我们看到工人天天拿着一百多公斤的焊钳,一天焊几千个点,就重复性的劳动,一方面他很累,但是产品的质量仍然很低;另一方面机器人干人干不了的活,这也是非常重要的机器人发展的一个理由,比方说人们对太空的认识,人上不去的时候,叫机器人上天,上月球,以及到海洋,进入到人体的小机器人,以及在微观环境下,对原子分子进行搬迁的机器人,都是人们不可达的工作。 机器人是一个具有有类人的功能,比如说作业功能;感知功能;行走功能;还能完成各种动作,还有一个特点是根据人的编程能自动的工作,这里一个显著的特点,就是可以编程,改变工作、动作、工作的对象和工作的一些要求。是人造的机器或机械电子装置,所以这种机器人仍然是个机器。但是目前还没有一个统一的有关机器人定义,一般来说认为机器人是计算机控制的可以编程的目前能够完成某种工作或可以移动的自动化机械,这是美国工程师协会定的一个定义,但日本和其他国家也对机器人有不同的看法,从完整的更为深远的机器人定义来看,应该更强调机器人智能,所以又提出来机器人的定义是能够感知环境,能够有学习、情感和对外界一种逻辑判断思维的这种机器。那么这给机器人提出来更高层次的要求,所以要求设计出机器人。 1.2设计背景 首先我介绍一下机器人产生的背景,机器人技术的发展,它应该说是一个科学技术发展共同的一个综合性的结果,也同时,为社会经济发展产生了一个重大影响的一门科学技术,它的发展归功于在第二次世界大战中,各国加强了经济的投入,就加强了本国的经济的发展。 另一方面它也是生产力发展的需求的必然结果,也是人类自身发展的必然结果,那么人类的发展随着人们这种社会发展的情况,人们越来越不断探讨自然过程中,在改造自然过程中,认识自然过程中,实现人们对不可达世界的认识和改造,这也是人们在科技发展过程中的一个客观需要。 “迎宾机器人”是一个机电结合的制作。在现实当中,当客人来到门口时,会向客人热情的说一句“欢迎光临”,同时记下进入人数,同样当有客人从门口离
双足机器人制作及其步态运行
双足机器人制作及其步态运行 一、实验目的 1 . 掌握实验室设备使用方法 2 . 学会AutoCAD知识并运用以及学习arduino单片机的基本开发 3 . 了解双足机器人平衡控制方法。 二、原理说明 1.Arduino使用说明 Arduino是一款便捷灵活、方便上手的开源电子原型平台。包含硬件(各种型号的Arduino板)和软件(Arduino IDE)。它构建于开放原始 码simple I/O介面版,并且具有使用类似Java、C语言的 Processing/Wiring开发环境。主要包含两个主要的部分:硬件部分是可 以用来做电路连接的Arduino电路板;另外一个则是Arduino IDE,你的 计算机中的程序开发环境。你只要在IDE中编写双足步态程序代码,将 程序上传到Arduino电路板后,程序便会告诉Arduino电路板要做怎样 的步态运行。 2 . 双足步态算法 双足机器人平衡控制方法其中的“静态步行”(static walking),这种方法是在机器人步行的整个过程中,重心(COG,Center of Gravity)在机器人底部水平面的投影一直处在不规则的支撑区域(support region)内,这种平衡控制方法的好处是整个机器人行走的过程中,保证机器人 稳定行动,不会摔倒。但是这个平衡控制方法缺点是行动速度非常缓慢 (因为整个过程中重心的投影始终位于支撑区域)。另一种使用的平衡 控制方法是“动态步行”(dynamic walking),在这个控制方法中机器 人的步行速度得到了极大的飞跃,显而易见,在得到快速的步行速度同 时,机器人很难做到立即停止。从而使得机器人在状态转换的过程中显 现不稳定的状态,为了避免速度带来的影响。零力矩点(ZMP)被引入 到这个控制策略中,在单脚支撑相中,引入ZMP=COG。引入ZMP的好 处在于,如果ZMP严格的存在于机器人的支撑区域中,机器人绝不摔倒。
搬运机器人结构设计与分析设计说明
搬运机器人结构设计与分析 摘要 在当今大规模制造业中,企业为提高生产效率,保障产品质量,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平。目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作。 本课题主要对搬运机器人的机械部分展开讨论,对原有的机械结构提出了新的改进方法,并把现在的新技术应用到本课题中,从而使得搬运机器人更加适用于现在的工业工作环境。通过详细了解搬运机器人在工业上的应用现状,提出了具体的搬运机器人设计要求,并根据搬运机器人各部分的设计原则,进行了系统总体方案设计以及包括:机器人的手部、腕部、臂部、腰部在的机械结构设计。此搬运机器人的驱动源来自液压系统,执行元件包括:柱塞式液压缸、摆动液压缸、伸缩式液压缸等。通过液压缸的运动来实现搬运机器人的各关节运动,进而实现搬运机器人的实际作业。 关键词:搬运机器人;液压系统;机械结构设计;操作
Abstract In the modern large-scale manufacturing industry,enterprises to improve productivity, and,guarantee product quality, as an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. Industrial robot technology standards and application level, to a certain extent, reflect a level of national industrial automation. Currently, Industrial robot mainly tasked with welding, spraying, handling and stacking, repetitive and intensity of significant work. The subject of the main part of the handling of their machinery discussions, and on the original mechanical structure proposed for the new improved method, which makes the handling robot is more applicable to the present industrial working environment.Through a detailed understanding of the robot in the industrial application,to propose specific handling robot design requirements,and according to the robot design principles of various parts, for the system as well as including:the robot's hand, wrist, arm, waist, the design of mechanical structures.The transfer robot driven by the source from the hydraulic system, and the implementation of components including:plunger hydraulic cylinders, hydraulic cylinders, swing, telescopic hydraulic cylinders, etc.Through the hydraulic cylinder movements to implement the joint transport robot motion,And realize the operational handling robot. Keywords:Transfer robot;Hydraulic System;Mechanical Design;Operating
一种双足步行机器人的步态规划方法
?16? 一种双足步行机器人的步态规划方法 □胡洪志马宏绪 国防科技大学机电工程与自动化学院 [摘要]本文介绍了一种双足步行机器人的步态规划方法,以前向运动为例,详细介绍了先分阶段规划然后合成的方法,并 讨论了行走过程中的冲击振动问题及减振措施,实验及仿真结果验证了这一规划方法的有效性。[关键字]双足步行机器人步态规划减振 [Abstract]In this p a p er ,w e p ut forw ard a m ethod for hum anoid robot g ait p lannin g .W e take forw ard m otion for exam p le ,illustrate the p hase p lannin g and com p ound m ethod in detail.T his p a p er also discusses the im p act v ibration p roblem and how to g et rid of it.T he ex 2p erim ent and simulation result verified the validation of the m ethod. [K e y w ords]bi p ed robot ;g ait p lannin g ;v ibration decrease [作者简介]胡洪志:男,1978年3月生,国防科技大学机电工程与自动化学院研究生,研究方向:智能机器人系统。 马宏绪:男,1966年8月生,国防科技大学机电工程与自动化学院教授,硕士生导师,研究方向:智能机器人系统。 1引言 双足步行机器人的研究是由仿生学、机械工程学和控制理论等多种学科相互融合而形成的一门综合学科,是机器人研究的一个重要分支。双足步行机器人的研究可以促进多个学科的研究,并为相关学科的研究提供一个平台,具有很大的理论价值。在实际应用中,双足步行机器人可用于有放射性、危险及其它对人体有害的环境中取代人类劳动,把人从高强度、长时间及单调乏味的工作中解脱出来,具有广阔的市场前景。步行机器人最大的特征是步行,步态是在步行运动过程中,步行体的身体各部位在时序和空间上的一种协调关系,步态规划是双足步行机器人研究中的一个关键技术。要实现和提高机器人的行走性能,必须研究实用 而有效的步态规划方法,实现机器人的稳定步行。 2双足步行机器人模型 本文的研究对象是一台具有12关节自由度的双足步行机构,每条腿各有6个自由度,即:踝关节有前向和侧向两个自由度;膝关节一个前向自由度,髋关节具有三个 自由度,包括前向、侧向及转弯自由度。由仿真分析及实验研究可知,在步行运动中,双足步行机器人前向各关节的运动与侧向各关节运动之间的耦合很小,可以忽略这一耦合的影响,对机器人前向和侧向的运动分开建模。本文主要讨论前向运动的步态规划问题。 前向运动模型如下图一: 定义:双腿关节,先左腿,后右腿,左腿由下至上,右腿由上至下,依次标注为1,2,3,...,10,11,12,各关节对应的转角依次为θ1,θ2,θ3,…,θ10,θ11,θ12,其中θ1,θ5,θ8,θ12,分别为双腿侧向关节对应的转角;θ2,θ3,θ4,θ11,θ10,θ9为双腿前向关节对应的转角;θ6, θ7转弯关节在前向运动中始终保持为零。 图一
双足机器人设计
小型双足步行机器人的结构及其控制电路设计 两足步行是步行方式中自动化程度最高、最为复杂的动态系统。两足步行系统具有非常丰富的动力学特性,对步行的环境要求很低,既能在平地上行走,也能在非结构性的复杂地面上行走,对环境有很好的适应性。与其它足式机器人相比,双足机器人具有支撑面积小,支撑面的形状随时间变化较大,质心的相对位置高的特点。是其中最复杂,控制难度最大的动态系统。但由于双足机器人比其它足式机器人具有更高的灵活性,因此具有自身独特的优势,更适合在人类的生活或工作环境中与人类协同工作,而不需要专门为其对这些环境进行大规模改造。例如代替危险作业环境中(如核电站内)的工作人员,在不平整地面上搬运货物等等。此外将来社会环境的变化使得双足机器人在护理老人、康复医学以及一般家务处理等方面也有很大的潜力。 双足步行机器人自由度的确定 两足步行机器人的机构是所有部件的载体,也是设计两足步行机器人最基本的和首要的工作[1]。它必须能够实现机器人的前后左右以及爬斜坡和上楼梯等的基本功能,因此自由度的配置必须合理:首先分析一下步行机器人的运动过程(前向)和行走步骤:重心右移(先右腿支撑)、左腿抬起、左腿放下、重心移到双腿中间、重心左移、右腿抬起、右腿放下、重心移到双腿间,共分8个阶段。从机器人步行过程可以看出:机器人向前迈步时,髓关节与踝关节必须各自配置有一个俯仰自由度以配合实现支撑腿和上躯体的移动;要实现重心转移,髋关节和踝关节的偏转自由度是必不可少的;机器人要达到目标位置,有时必须进行转弯,所以需要有髋关节上的转体自由度。另外膝关节处配置一个俯仰自由度能够调整摆动腿的着地高度,使上下台阶成为可能,还能实现不同的步态。这样最终决定髋关节配置3个自由度,包括转体(roll)、俯仰(pitch)和偏转(yaw)自由度,膝关节配置一个俯仰自由度,踝关节配置有俯仰和偏转两个自由度。这样,每条腿配置6个自由度,两条腿共12个自由度。髋关节、膝关节和踝关节的俯仰自由度共同协调动作可完成机器人的在纵向平面(前进方向)内的直线行走功能;髋关节的转体自由度可实现机器人的转弯功能;髋关节和踝关节的偏转自由度协调动作可实现在横向平面内的重心转移功能。 机器人的转体(roll)、俯仰(pitch)和偏转(yaw)定义如图1所示[2]。
机器人设计说明书
机械制造装备设计说明书 设计日期:2015年6月16日
前言 机器人(Robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
目录 1、机器人型号.................................................................................. 错误!未定义书签。 2、关节机械原理图 ....................................................................... 错误!未定义书签。 3、各关节运动范围及最快速度 (4) 4、拆装过程 (6) 5、零件明细表 (6) 6、所拆关节减速器工作原理 ....................................................................................... 小结.......................................................................................................................................... 参考文献................................................................................................. 错误!未定义书签。
新型四足机器人步态仿真与实现
M ac hine B uilding A uto mation,Jun 2008,37(3):21~23,33 作者简介:马东兴(1982— ),男,江苏省丹阳市人,在读硕士研究生,主要从事虚拟样机和四足机器人技术研究。 新型四足机器人步态仿真与实现 马东兴,王延华,岳林 (南京航空航天大学机电学院,江苏南京210016) 摘 要:研究一种背部带关节的新型四足机器人,通过三维建模软件Pr o /E 和机械系统动力学 仿真分析软件ADAMS 建立了四足机器人虚拟样机,规划了四足机器人的步态,并且利用AD 2AM S 仿真软件对该四足机器人进行了步态仿真,同时利用单个AT89C52单片机成功实现对四足机器人5个舵机的独立控制以及舵机的速度控制。仿真与实验结果表明四足机器人能够根据设计步态实现直线行走。 关键词:四足机器人;步态仿真;舵机;单片机中图分类号:TP24 文献标识码:A 文章编号:167125276(2008)0320021203 Ga it S i m ul a ti on and I m plem en t a ti on of a New Quadruped Robot MA Dong 2xing,WANG Yan 2hua,Y UE L in (Co ll ege o f M echan i ca l and E l ec tri ca l Eng i nee ri ng,N a n ji ng U n i ve rs ity o f Ae r o na u ti c s & A s tr o na u ti c s,N a n ji ng 210016,C h i na ) Abstract:A new qua drup e d r obo t w ith w a ist 2j o i nt is d iscu sse d i n this p ap e r .The virtua l p r o t o type o f quad rup ed r obo t is c re a te d by P r o /E a nd ADAM S a nd the ga it o f the r obo t is p l a nne d.The ga it s i m ul a ti o n of the qua drupe d r o bo t is do ne by ADAM S virtua lp r o t o ty 2p i ng so ft w a re.M e a nw hil e ,w e succe s sfull y con tr o l fi ve rudde r se rvo s by a s i ngl e AT89C52SCM a nd a lso rea li ze the ve l o c ity co ntr o l of the rudde r se rvo.The s i m ul a ti o n a nd e xp e ri m e nta l re sults show tha t the qua drup e d r o t w ith w a is t 2j o i n t ca n w a l k s tra i ght s te a dil y thr ough the de s i gned ga it . Key words:qua drup e d r obo t;ga it s i m ul a ti o n;rudde r se rvo;SCM 0 引言 与轮式机器人或履带式机器人相比,由于足式机器人的立足点是离散的点,可以在可能到达的地面上选择最优的支撑点,足式机器人对崎岖路面也具有很好的适应能力,因此足式机器人受到各国研究人员的普遍重视,目前已成功开发了多款足式机器人。例如日本东京工业大学 研发的TI T AN 2V III [1] 机器人,每个腿具有3个自由度,其 中大腿关节具有前后转动和上下转动2个自由度,膝关节具有1个上下转动自由度。采用新型的电机驱动和绳传动。上海交通大学马培荪等人研制的JT UWM 2III 四足机器人[2, 3] ,腿为开链式关节型结构,膝关节为一纵摇自由 度,髋关节为纵摇和横摇2个自由度。每一腿有3个自由度,共12个自由度。机体重心较高,与哺乳类动物相似,适应于动态行走。华中科技大学研发的“4+2”多足步行机器人[4, 5] ,其腿部件由髖关节、大腿关节、小腿关节和踝 关节四部分组成,大、小腿关节之间由线轮传动,每一腿有 3个自由度。但是先前研制的机器人的本体大多是一个 刚性整体,没有考虑机器人的背部关节。 因此,在分析卡内基梅隆大学(Carnegie Mell on Uni 2 versity )研制的RGR 仿壁虎机器人[628] ,以及韩国庆北大学(Kyungpook Nati onal University )设计的E L I RO 2II 四足步行机器人的基础上[9, 10] ,研究了一种新型四足机器人。 该机器人与传统的足式机器人相比,其机器人本体不再是 一个单一的刚性整体,而是在本体上用一个主动关节将机 器人的本体分为前后两个部分,通过背部主动关节的运动来实现四足机器人的直线行走。通过机械系统动力学仿真分析软件(aut omatic dynam ic analysis of mechanical sys 2te m s,ADAMS )对该四足机器人虚拟样机进行步态仿真,同时利用单个AT89C52单片机成功实现对四足机器人5个舵机的独立控制以及舵机的速度变化,四足机器人的直线行走平均速度达到12.14mm /s 。 1 四足机器人虚拟样机 1.1 四足机器人结构 传统的四足机器人每个腿有2个或3个自由度,本文研究的四足机器人结构简单,每个腿只有1个自由度,但是在机器人背部增加了1个自由度。四足机器人的结构如图1所示。该四足机器人有5个主动关节(图中关节1至关节5)和1个被动关节(6点),各关节的运动方向如图1所示。主动关节由舵机驱动。z 轴正方向为四足机器人前进方向。关节1至关节4四个主动关节可以使各腿在xoy 平面上下摆动。关节5可以使前后本体在xoz 平面转动。 1.2 四足机器人接触力 当足与地面之间发生接触时,这两个物体就在接触的 ? 12?
下肢步态康复机器人的研究综述
- 416 -有的效果。在急性胰腺炎的治疗中,传统的方法是绝对禁食并给与全肠外营养使胰腺得到“休息”,这样既可以较容易控制营养供应又能避免麻痹性肠梗阻及胰腺刺激。然而除了增加费用及导管相关性败血症风险以外,全肠外营养还可能使炎症过程恶化,导致新陈代谢及水电解质紊乱,增加肠粘膜渗透率,破坏肠粘膜屏障,进而引起脓毒症及多器官功能衰竭。Ionnn idis O等研究表明,肠内营养能维持肠道机械、生物、免疫屏障功能,降低内毒素血症,减少肠源性感染,并可以防止多器官功能衰竭。[25]C.S. Mansfield等通过对狗的动物实验研究表明,针对急性胰腺炎早期肠内营养较之肠外营养有更好的耐受性及更低的并发症发生率。[26]国内吴兴茂等也分析研究后得出以下结论,在阻止胰腺坏死感染方面肠内营养明显优于肠外营养[27] 。 综上所述,肠内营养在显著改善肝胆胰疾病患者的营养状态,延缓疾病发展进程,减少其并发症发生率及延长其生存率等方面显著优于肠外营养,目前已在临床治疗中广泛应用,其临床应用价值仍有待进一步研究与开发。 参 考 文 献 [1]Vieira JP,Araujo GF,et al.Parenteral nutrition versus enteral nutrition in severe acute pancreatitis [J].Acta Cir Bras. 2010,25(5):449-454. [2]Petrov MS,Whelan https://www.360docs.net/doc/2e4053007.html,parison of complications attributable to enteral and parenteral nutrition in predicted severe acute pancreatitis: a systematic review and meta-analysis [J]. Br J Nutr. 2010 ,103(9):1287-1295. [3] Vieira JP,Araujo GF,et al. Parenteral nutrition versus enteral nutrition in severe acute pancreatitis [J].Acta Cir Bras. 2010,25(5):449-454. [4]Petrov MS,Whelan K. Comparison of complications attributable to enteral and parenteral nutrition in predicted severe acute pancreatitis: a systematic review and meta-analysis [J]. Br J Nutr. 2010 ,103(9):1287-1295. [5] Quan H,Wang X,Guo C. A meta-analysis of enteral nutrition and total parenteral nutrition in patients with acute pancreatitis [J]. Gastroenterol Res Pract. 2011;2011:698248. [6] Wu X M,Ji K Q,Wang H Y,et al. Total enteral nutrition in prevention of pancreatic necrotic infection in severe acute pancreatitis[J]. Pancreas. 2010 39(2):248-251. [7]Plauth M,Cabré E,Riggio O.ESPEN Guidelines on Enteral Nutrition:liver disease[J].Clinical Nutrition. 2006(25),285啰294. [8]Ronis MJ,Hennings L,Stewart B,et al.Effects of long-term ethanol administration in a rat total enteral nutrition model of alcoholic liver disease[J].Am J Physiol Gastrointest Liver Physiol.2011 Jan;300(1):G109-19. [9]C h r i s t o p h e M o r e n o1,P h i l i p p e L a n g l e t,Axel Hittelet,et al.Enteral nutrition with or without N-acetylcysteine in the treatment of severe acute alcoholic hepatitis:A randomized multicenter controlled trial[J].Journal of Hepatology .2010 53(8),1117啰1122. [10]M e n g Q H,Y u H W,L i J,e t a l. I n a d e q u a t e nutritional intake and protein energy malnutrition involved in acute and chronic viral hepatitis Chinese patients especially in cirrhosis patients[J].Hepatogastroenterology,2010,57( 101) : 845-851. [11]Kachaamy T,Bajaj JS. Diet and cognition in chronic liver disease[J].Curr Opin Gastroenterol,2011,27( 2) : 174-179. [12]Zhao VM,Ziegler TR. Nutrition support in end stage liver disease[J].Crit Care Nurs Clin North Am ,2010,22 ( 3 ) : 369-380. [13] Moreno Villares JM. Parenteral nutrition-associated liverdisease[J] . Nutr Hosp,2008,23( 2) : 25-33. [14]周召海,彭永鹏,张建立. 部分肠内营养支持对肝硬化病人的治疗效果[J]. 青岛大学医学院学报,2009,45( 6) : 544-546. [15] Rayes N,Seehofer D,Theruvath T,et al. Effect of enteral nutrition and synbiotics on bacterial infection rates after pylorus-preserving pancreatoduodenectomy. Ann Surg. 2007,246(1):36-41. [16] Plauth M,Riggio O,Assis-Camilo M,et al. ESPEN Guidelines on Enteral Nutrition: Liver disease. Clin Nutr. 2006,25(2):285-294. [17]罗文峰,时军,周凯等. 肝移植后早期营养支持的评估[J]. 中国组织工程研究与临床康复,2011,15(5):800-805. [18] Marik PE,Zaloga GP. Immunonutrition in high-risk surgical patients: a systematic review and analysis of the literature[J]. Parenter Enteral Nutr. 2010,34(4):378-386. [19] Schreiter D,Rabald S,Bercker S,et al.The s i g n i f i c a n c e o f p e r i o p e r a t i v e i m m u n o n u t r i t i o n[J]. Laryngorhinootologie. 2010,89(2):103-113. [20]Z h a o D F,Z h a n g K,L a n g R,e t a l.C l i n i c a l observation of enteral immunonutrition in patients undergoing liver transplantation[J].Zhongguo Zuzhi Gongcheng Yanjiu yu Linchuang Kangfu.2011;15(31):5873-5878. [21]O'Brien A,Williams R.Nutrition in end-stage liver disease:principles and practice[J].Gaatrcemerology.2008,134(6):1729-1740. [22] Wiles A,Woodward J M.Recent advances in the management of intestinal failure-associated liver disease[J].Curr Opin Clin Nutr Metab Care.2009,12(3):265-272. [23]保红平,杨浩雷,高瑞岗等.早期肠内营养在胆道外科患者术后的临床应用[J].肝胆胰外科杂志,2007,19(5):55-56. [24]陈强谱.肠内营养的技术与应用[J].世界华人消化杂志,2000,8(12):1389. [25]Ionnnidis O,Lavrentieva A,Botaioe D. Nutrition support in acute pancreatitis [J].JOP.2008,9( 4) :375-390. [26]Mansfield CS,James FE,Steiner JM,et al. A pilot study to assess tolerability of early enteral nutrition via esophagostomy tube feeding in dogs with severe acute pancreatitis[J].Vet Intern Med.2011;25(3):419-425. [27]Wu,Xing-Mao MD,Ji,Kai-Qiang MD,Wang,Hai-Yuan MD,et al.Total Enteral Nutrition in Prevention of Pancreatic Necrotic Infection in Severe Acute Pancreatitis[J].Pancreas.2010,39(2):248-251. 【摘要】目前国内机构少有涉足于康复机器人的研究,而国外的辅助康复治疗机器人设备已有很多,所运用到的机器人检测技术和控制技术也各有不同。本文主要介绍无锡市康复医院Lokehelp康复机器人的原理、国内外的研究进展及展望。 【关键词】Lokehelp康复机器人 原理 进展 展望 下肢步态康复机器人的研究综述 王小勇 过克方 黄建(无锡市康复医院康复科 江苏无锡 214000) 【中图分类号】R496【文献标识码】A【文章编号】1672-5085(2012)28-0416-03 无锡市康复医院Lokehelp康复机器人是第一台拥有专利技术的跑台设计的步态训练器,并且完成了W O O D W A Y跑台系统, 万方数据