通信系统建模与仿真作业
通信系统建模与仿真作业
在高斯白噪声的情况下,求2ASK、2PSK、2FSK的误码率。解答:
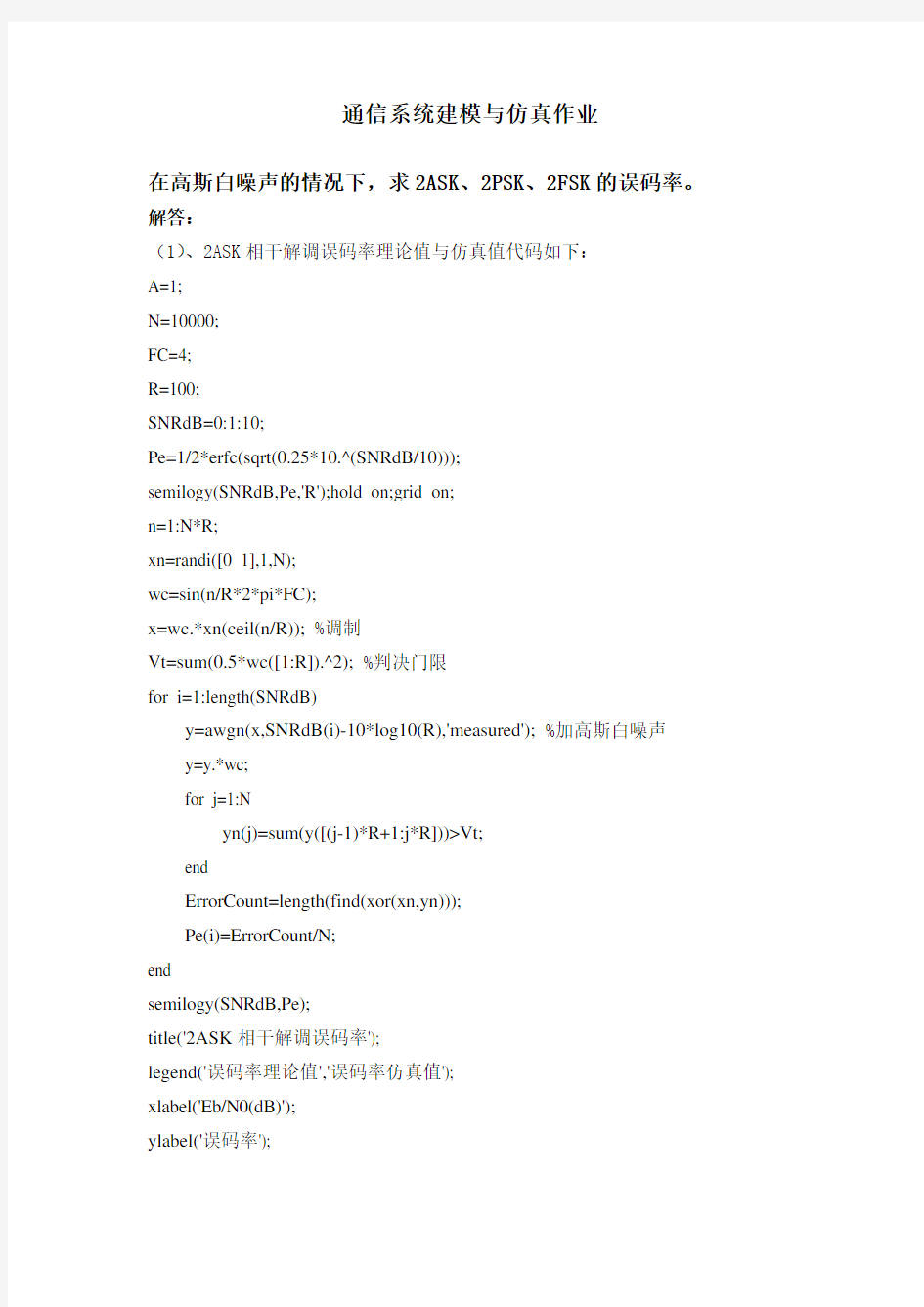
(1)、2ASK相干解调误码率理论值与仿真值代码如下:
A=1;
N=10000;
FC=4;
R=100;
SNRdB=0:1:10;
Pe=1/2*erfc(sqrt(0.25*10.^(SNRdB/10)));
semilogy(SNRdB,Pe,'R');hold on;grid on;
n=1:N*R;
xn=randi([0 1],1,N);
wc=sin(n/R*2*pi*FC);
x=wc.*xn(ceil(n/R)); %调制
Vt=sum(0.5*wc([1:R]).^2); %判决门限
for i=1:length(SNRdB)
y=awgn(x,SNRdB(i)-10*log10(R),'measured'); %加高斯白噪声
y=y.*wc;
for j=1:N
yn(j)=sum(y([(j-1)*R+1:j*R]))>Vt;
end
ErrorCount=length(find(xor(xn,yn)));
Pe(i)=ErrorCount/N;
end
semilogy(SNRdB,Pe);
title('2ASK相干解调误码率');
legend('误码率理论值','误码率仿真值');
xlabel('Eb/N0(dB)');
ylabel('误码率');
(2)、2ASK非相干解调误码率理论值与仿真值代码如下:
A=1;
N=10000;
FC=2;
R=64;
SNRdB=0:1:10;
Pe=1/2*exp(-0.25*10.^(SNRdB/10));
semilogy(SNRdB,Pe,'R');hold on;grid on;
n=1:N*R;
xn=randi([0 1],1,N);
wc=sin(n/R*2*pi);
x=wc.*xn(ceil(n/R));%调制
Vt=sum(0.5*wc([1:R]).^2);%判决门限
for i=1:length(SNRdB)
y=awgn(x,SNRdB(i)-10*log10(R),'measured');%加高斯白噪声 for j=1:N
z=y([(j-1)*R+1:j*R]);
z=conv(z,wc([1:R]));
z=abs(hilbert(z));
z=z(R);
yn(j)=z>Vt;
end
ErrorCount=length(find(xor(xn,yn))); Pe(i)=ErrorCount/N;
end
%%打印图形
semilogy(SNRdB,Pe);
title('2ASK非相干解调误码率');
legend('误码率理论值','误码率仿真值'); xlabel('Eb/N0(dB)');
ylabel('误码率');
(3)、2PSK相干解调误码率理论值与仿真值代码如下:
A=1;
N=10000;
FC=4;
R=100;
SNRdB=0:1:10;
Pe=1/2*erfc(sqrt(0.5*10.^(SNRdB/10)));
semilogy(SNRdB,Pe,'R');hold on;grid on;
n=1:N*R;
xn=randi([0 1],1,N);
wc=sin(n/R*2*pi*FC);
x=wc.*xn(ceil(n/R))-wc.*(1-xn(ceil(n/R))); %调制
Vt=0; %判决门限
for i=1:length(SNRdB)
y=awgn(x,SNRdB(i)-10*log10(R),'measured'); %加高斯白噪声 y=y.*wc;
for j=1:N
yn(j)=sum(y([(j-1)*R+1:j*R]))>Vt;
end
ErrorCount=length(find(xor(xn,yn)));
Pe(i)=ErrorCount/N;
end
semilogy(SNRdB,Pe);
title('2PSK相干解调误码率');
legend('误码率理论值','误码率仿真值');
xlabel('Eb/N0(dB)');
ylabel('误码率');
(4)、2FSK相干解调误码率理论值与仿真值代码如下:
A=1;
N=10000;
FC1=4;
FC0=2;
R=100;
SNRdB=0:1:10;
Pe=1/2*erfc(sqrt(0.25*10.^(SNRdB/10)));
semilogy(SNRdB,Pe,'R');hold on;grid on;
n=1:N*R;
xn=randi([0 1],1,N);
wc1=sin(n/R*2*pi*FC1);
wc0=sin(n/R*2*pi*FC0);
x=wc1.*xn(ceil(n/R))+wc0.*(1-xn(ceil(n/R)));%调制
Vt=0; %判决门限
for i=1:length(SNRdB);
y=awgn(x,SNRdB(i)-10*log10(R),'measured'); %加高斯白噪声
y1=y.*wc1;
y0=y.*wc0;
for j=1:N
yn(j)=(sum(y1([(j-1)*R+1:j*R]))-sum(y0([(j-1)*R+1:j*R])))>Vt; end
ErrorCount=length(find(xor(xn,yn)));
Pe(i)=ErrorCount/N;
end
semilogy(SNRdB,Pe);
title('2FSK相干解调误码率');
legend('误码率理论值','误码率仿真值');
xlabel('Eb/N0(dB)');
ylabel('误码率');
(5)、2FSK非相干解调误码率理论值与仿真值代码如下:
A=1;
N=10000;
FC1=4;
FC0=2;
R=100;
SNRdB=0:1:10;
Pe=1/2*exp(-0.25*10.^(SNRdB/10));
semilogy(SNRdB,Pe,'R');hold on;grid on;
n=1:N*R;
xn=randi([0 1],1,N);
wc1=sin(n/R*2*pi*FC1);
wc0=sin(n/R*2*pi*FC0);
x=wc1.*xn(ceil(n/R))+wc0.*(1-xn(ceil(n/R)));%调制
Vt=0;%判决门限
for i=1:length(SNRdB)
y=awgn(x,SNRdB(i)-10*log10(R),'measured');%加高斯白噪声 for j=1:N
z=y([(j-1)*R+1:j*R]);
z1=conv(z,wc1([1:R]));
z1=abs(hilbert(z1));
z1=z1(R);
z0=conv(z,wc0([1:R]));
z0=abs(hilbert(z0));
z0=z0(R);
yn(j)=(z1-z0)>Vt;
end
ErrorCount=length(find(xor(xn,yn)));
Pe(i)=ErrorCount/N;
end
%%打印图形
semilogy(SNRdB,Pe);
title('2FSK非相干解调误码率');
legend('误码率理论值','误码率仿真值'); xlabel('Eb/N0(dB)');
ylabel('误码率');
通信系统建模与仿真课程设计
通信系统建模与仿真课程设计2011 级通信工程专业1113071 班级 题目基于SIMULINK的基带传输系统的仿真姓名学号 指导教师胡娟 2014年6月27日
1任务书 试建立一个基带传输模型,采用曼彻斯特码作为基带信号,发送滤波器为平方根升余弦滤波器,滚降系数为0.5,信道为加性高斯信道,接收滤波器与发送滤波器相匹配。发送数据率为1000bps,要求观察接收信号眼图,并设计接收机采样判决部分,对比发送数据与恢复数据波形,并统计误码率。另外,对发送信号和接收信号的功率谱进行估计。假设接收定时恢复是理想的。 2基带系统的理论分析 1.基带系统传输模型和工作原理 数字基带传输系统的基本组成框图如图1 所示,它通常由脉冲形成器、发送滤波器、信道、接收滤波器、抽样判决器与码元再生器组成。系统工作过程及各部分作用如下。 g T(t) n 定时信号 图 1 :数字基带传输系统方框图 发送滤波器进一步将输入的矩形脉冲序列变换成适合信道传输的波形g T(t)。这是因为矩形波含有丰富的高频成分,若直接送入信道传输,容易产生失真。 基带传输系统的信道通常采用电缆、架空明线等。信道既传送信号,同时又因存在噪声n(t)和频率特性不理想而对数字信号造成损害,使得接收端得到的波形g R(t)与发送的波形g T(t)具有较大差异。 接收滤波器是收端为了减小信道特性不理想和噪声对信号传输的影响而设置的。其主要作用是滤除带外噪声并对已接收的波形均衡,以便抽样判决器正确判决。 抽样判决器首先对接收滤波器输出的信号y(t)在规定的时刻(由定时脉冲cp控制)进行抽样,获得抽样信号{r n},然后对抽样值进行判决,以确定各码元是“1”码还是“0”码。 2.基带系统设计中的码间干扰和噪声干扰以及解决方案
物流仿真大作业.doc
物流系统仿真 期末作业 题目:Manufacturing System Planning and Scheduling 班级:物流工程131 学号:1311393003 1311393008 姓名:黎宇帆张力夫 日期:2015-09-19 成绩:
制造系统规划与调度 翻译 2.1引言 现代生产调度工具是非常强大的,提供了广阔的范围内调整工具的行为的真实过程要求的选项和参数。 然而,更多的选项的存在,它就在实践中找到的工具的最佳配置更加困难。 即专家们经常无法预测的多种可能性的影响。 测试甚至一小部分在现实中可能的配置,对实际生产过程的影响可能需要几个月的时间,可能会严重降低整体性能。 因此,这样的试验在实践中是不可行的。 优化的生产调度仿真模型比使用真正的过程更安全,更便宜,更快,更容易测试。为了在一个中等规模的制造公司充分使用先进的调度工具的优势,找到它的一个最佳的规则和参数的优化配置。 模块化仿真模型的整个业务的制造系统和生产过程中阳极氧化阶段是建立以测试不同的调度配置的影响。调度工具的配置测试和优化进行了离线使用的仿真模型。实际生产过程不受干扰,可以非常快速、低成本的找到最优配置。 2.2问题描述 位于英国的一个中型制造商,生产一系列的不同的小压铝零件和一系列大批量的其他面向消费者的产品。典型的应用包括香水的喷雾组件和哮喘患者的分配器。这是一个高度竞争的行业,成功取决于是否能实现高效率和低成本制造。所以生产调度是非常重要的。 在过去,该公司安装的软件工具可以支持生产过程中的各个区域调度。全面提高公司绩效,增加产量和减少产品的交货时间,他们计划建立自动电抗器的供应链规划服务器–总调度系统协调当地所有的业务和生产区。为了提供最好的解决方案,调度工具供应商,预优国际(https://www.360docs.net/doc/40977856.html,)决定使用模拟求解调度工具的优化配置。 问题是建立一个仿真工具,它将接受的到来客户订单和生产订单排序以满足这些需求。一个重要的地方是模型的生产过程本身,以确保它的主要阶段的最佳时刻加载。阳极氧化阶段是整个生产过程中特别重要的,因此,它必须是非常详细的模拟,以测试到整体订单的交货时间可以通过阳极氧化过程阶段优化减少到什么程度。 在这种情况下的研究主要目标是以下几个: (1)为了确定公司模型间的相关业务和生产过程和确定订单和交货时间, (2)在规划部门分析和优化业务流程,为了处理传入的需求和规划生产订单。 (3)测试的整体生产时间,提高灵敏度,特别是确定是否引入特定排序规则的生产订单将减少在阳极氧化处理阶段总的处理时间。
系统仿真示例
Flexsim应用案例示例 示例一港口集装箱物流系统仿真 (根据:肖锋,基于Flexsim集装箱码头仿真平台关键技术研究,武汉:武汉理工大学硕士学位论文,2006改编) 1、港口集装箱物流系统概述与仿真目的 1.1港口集装箱物流系统概述 1.2港口集装箱物流系统仿真的目的 2、港口集装箱物流系统的作业流程 2.1港口集装箱物流系统描述 2.2港口集装箱物流系统作业流程 2.3港口集装箱物流系统离散模型分析 3、港口集装箱物流系统仿真模型 3.1港口集装箱物流系统布局模型设计 3.2港口集装箱物流系统设备建模 3.3港口集装箱物流系统仿真 4、仿真运行及数据分析 4.1仿真运行及数据处理 4.2仿真数据的结果分析 小结与讨论 示例二物流配送中心仿真 (根据:XXX改编) 1、物流配送中心概述与仿真目的 1.1物流配送中心简介 1.2仿真目的 2、配送中心的作业流程描述 2.1配送中心的功能 2.2配送中心的系统流程
3、配送中心的仿真模型 3.1配送中心的仿真布局模型设计 3.2配送中心的设备建模 3.3配送中心的仿真 4、仿真运行及数据分析 4.1仿真运行及数据处理 4.2仿真数据结果分析 4.3系统优化 小结与讨论 “我也来编书”示例 示例一第X章排队系统建模与仿真学习要点 1、排队系统概述 2、排队系统问题描述 3、排队系统建模 4、排队系统仿真 5、模型运行与结果分析 小结 思考题与习题(3-5题) 参考文献 1、李文锋,袁兵,张煜.2010.物流系统建模与仿真(第6章) 北京:科学出版社 2、王红卫,谢勇,王小平,祁超.2009.物流系统仿真(第6章) 北京:清华大学出版社 3、马向国,刘同娟.2012.现代物流系统建模、仿真及应用案例(第5章)
通信系统建模与仿真
《电子信息系统仿真》课程设计 级电子信息工程专业班级 题目FM调制解调系统设计与仿真 姓名学号 指导教师胡娟 二О一年月日
内容摘要 频率调制(FM)通常应用通信系统中。FM广泛应用于高保真音乐广播、电视伴音信号的传输、卫星通信和蜂窝电话系统等。 FM调制解调系统设计是对模拟通信系统主要原理和技术进行研究,理解FM系统调制解调的基本过程和相关知识,利用MATLAB集成环境下的M文件,编写程序来实现FM调制与解调过程,并分别绘制出基带信号,载波信号,已调信号的时域波形;再进一步分别绘制出对已调信号叠加噪声后信号,非相干解调后信号和解调基带信号的时域波形;最后绘出FM基带信号通过上述信道和调制和解调系统后的误码率与信噪比的关系,并通过与理论结果波形对比来分析该仿真调制与解调系统的正确性及噪声对信号解调的影响。在课程设计中,系统开发平台为Windows XP,使用工具软件为 7.0。在该平台运行程序完成了对FM调制和解调以及对叠加噪声后解调结果的观察。通过该课程设计,达到了实现FM信号通过噪声信道,调制和解调系统的仿真目的。了解FM调制解调系统的优点和缺点,对以后实际需要有很好的理论基础。 关键词 FM;解调;调制;M ATL AB仿真;抗噪性
一、M ATLAB软件简介 MATLAB是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。其特点是: (1) 可扩展性:Matlab最重要的特点是易于扩展,它允许用户自行建立指定功能的M文件。对于一个从事特定领域的工程师来说,不仅可利用Matlab所提供的函数及基本工具箱函数,还可方便地构造出专用的函数。从而大大扩展了其应用范围。当前支持Matlab的商用Toolbox(工具箱)有数百种之多。而由个人开发的Toolbox则不可计数。 (2) 易学易用性:Matlab不需要用户有高深的数学知识和程序设计能力,不需要用户深刻了解算法及编程技巧。 (3) 高效性:Matlab语句功能十分强大,一条语句可完成十分复杂的任务。如fft语句可完成对指定数据的快速傅里叶变换,这相当于上百条C语言语句的功能。它大大加快了工程技术人员从事软件开发的效率。据MathWorks公司声称,Matlab软件中所包含的Matlab 源代码相当于70万行C代码。
matlab机电系统仿真大作业
一曲柄滑块机构运动学仿真 1、设计任务描述 通过分析求解曲柄滑块机构动力学方程,编写matlab程序并建立Simulink 模型,由已知的连杆长度和曲柄输入角速度或角加速度求解滑块位移与时间的关系,滑块速度和时间的关系,连杆转角和时间的关系以及滑块位移和滑块速度与加速度之间的关系,从而实现运动学仿真目的。 2、系统结构简图与矢量模型 下图所示是只有一个自由度的曲柄滑块机构,连杆与长度已知。 图2-1 曲柄滑块机构简图 设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系 图2-2 曲柄滑块机构的矢量环
3.匀角速度输入时系统仿真 3.1 系统动力学方程 系统为匀角速度输入的时候,其输入为输出为;。 (1) 曲柄滑块机构闭环位移矢量方程为: (2)曲柄滑块机构的位置方程 (3)曲柄滑块机构的运动学方程 通过对位置方程进行求导,可得 由于系统的输出是与,为了便于建立A*x=B形式的矩阵,使x=[], 将运动学方程两边进行整理,得到 将上述方程的v1与w3提取出来,即可建立运动学方程的矩阵形式 3.2 M函数编写与Simulink仿真模型建立 3.2.1 滑块速度与时间的变化情况以及滑块位移与时间的变化情况 仿真的基本思路:已知输入w2与,由运动学方程求出w3和v1,再通过积分,即可求出与r1。 (1)编写Matlab函数求解运动学方程 将该机构的运动学方程的矩阵形式用M函数compv(u)来表示。 设r2=15mm,r3=55mm,r1(0)=70mm,。 其中各个零时刻的初始值可以在Simulink模型的积分器初始值里设置
M函数如下: function[x]=compv(u) %u(1)=w2 %u(2)=sita2 %u(3)=sita3 r2=15; r3=55; a=[r3*sin(u(3)) 1;-r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2));r2*u(1)*cos(u(2))]; x=inv(a)*b; (2)建立Simulink模型 M函数创建完毕后,根据之前的运动学方程建立Simulink模型,如下图: 图3-1 Simulink模型 同时不要忘记设置r1初始值70,如下图: 图3-2 r1初始值设置
制造系统建模与仿真知识点2
知识点2 1. 结合具体制造系统或服务系统,分析离散事件动态系统的基本特征。 2. 什么叫“状态空间爆炸”?产生状态空间爆炸的原因是什么?它给系统性能分析带来哪些 挑战? 3. 常用的离散事件系统建模方法有哪些,它们是如何分类的? 4. 什么是马尔可夫特性?它在离散事件系统建模与分析中有什么作用? 5. 根据功能不同,仿真模型(程序)可以分为哪三个层次?分析三个层次之间的关系。 6. 分析事件调度法、活动循环法、进程交互法和消息驱动法等仿真调度方法的特点,在分 析每种调度方法基本原理的基础上,阐述几种仿真调度方法之间的区别与联系,并绘制每种仿真调度方法的流程图。 7. 结合具体的离散事件系统,如银行、理发店、餐厅、超市、医院、作业车间等,采用事 件调度法、活动循环法或进程交互法分析建立此类系统的仿真模型,试分析仿真模型中的建模元素以及仿真调度流程。 8. 从系统描述、建模要点、仿真时钟推进机制等层面,比较事件调度法、活动循环法和进 程交互法的异同之处。 9. 什么叫仿真时钟,它在系统仿真中有什么作用?什么叫仿真时钟推进机制?常用的仿真 时钟推进机制有哪些?它们的主要特点是什么,分别适合于怎样的系统? 10.结合具体的离散事件系统,分析若采用固定步长时间推进机制、下次事件时间推进机制 或混合时间推进机制时,分别具有哪些优点和缺点,以图形或文字等形式分析时钟推进流程。 11.什么叫仿真效率?什么叫仿真精度?分析影响仿真效率和仿真精度的因素? 12.从仿真效率和仿真精度的角度,分析和比较三种仿真时钟推进机制的特点,并分析三种 仿真时钟推进机制分别适合于什么样的系统? 13. 什么是蒲丰投针试验?绘制蒲丰投针试验原理图,通过推导蒲丰投针试验中针与任一直 线相交的概率,分析采用随机投针试验方法来确定圆周率π的原理。 14. 按照蒲丰投针试验的条件和要求,完成投针试验,在统计投针次数、针与直线的相交次 数的基础上,求解π的估计值,并以报表或图形等形式表达试验结果。具体要求如下: ①自行确定针的长度、直线之间的距离。 ②投针10次、20次、30次、40次、50次、…、100次、…、200次、…,分别计算针 与直线相交的概率、π的估计值。 ③以一随机变量描述上述试验结果,并通过编程或采用商品化软件,以图形、报表等形 式表示投针试验结果,分析其中的规律,并给出结论。 ④写出试验报告。 ⑤在熟悉投针试验原理的基础上,编制投针试验仿真程序,动态运行投针试验的过程。15.什么是蒙特卡洛仿真?它有什么特点,蒙特卡洛仿真应用的基本步骤是什么? 16.采用C或C++等语言,分别编写产生均匀分布、正态分布、指数分布以及威布尔分布的伪随机数序列,通过改变每种分布中参数的数值,分析不同参数数值对随机数值的影响;通过对所产生的伪随机数分布区间的统计、分析和绘图,检验伪随机数的特性及其数值特征。 17. 对于制造系统而言,库存有哪些作用和功能? 18. 在制造企业中,库存大致可以分成四种类型。简要论述四种库存的名称和功能。 19. 什么是安全库存、订货提前期?确定安全库存和订货提前期时分别需要考虑哪些因素? 20. 什么叫“订货点法”?要确定订货点,需要哪些条件?订货点法适合于怎样的库存系统?
通信系统建模与仿真课程设计
1 任务书 试建立一个基带传输模型,采用曼彻斯特码作为基带信号, 发送滤波器为平方根升余弦滤波器,滚降系数为0.5,信道为加性高 斯信道,接收滤波器与发送滤波器相匹配。发送数据率为1000bps , 要求观察接收信号眼图,并设计接收机采样判决部分,对比发送数据 与恢复数据波形,并统计误码率。另外,对发送信号和接收信号的功 率谱进行估计。假设接收定时恢复是理想的。 2 基带系统的理论分析 2.1基带系统传输模型及工作原理 基带系统传输模型如图1所示。 发送滤波器 传送信道 接收滤波器 {an} n(t) 图1 基带系统传输模型 1)系统总的传输特性为(w)()()()H GT w C w GR w ,n (t )是信道中 的噪声。 2)基带系统的工作原理:信源是不经过调制解调的数字基带信号, 信源在发送端经过发送滤波器形成适合信道传输的码型,经过含有加
性噪声的有线信道后,在接收端通过接收滤波器的滤波去噪,由抽样 判决器进一步去噪恢复基带信号,从而完成基带信号的传输。 2.2 基带系统设计中的码间干扰及噪声干扰 码间干扰及噪声干扰将造成基带系统传输误码率的提升,影响基 带系统工作性能。 1)码间干扰及解决方案 a ) 码间干扰:由于基带信号受信道传输时延的影响,信号波形 将被延迟从而扩展到下一码元,形成码间干扰,造成系统误码。 b) 解决方案: ① 要求基带系统的传输函数H(ω)满足奈奎斯特第一准则: 2(),||i i H w Ts w Ts Ts ππ+ =≤∑ 不出现码间干扰的条件:当码元间隔T 的数字信号在某一理想低通 信道中传输时,若信号的传输速率位Rb=2fc (fc 为理想低通截止频 率),各码元的间隔T=1/2fc ,则此时在码元响应的最大值处将不 产生码间干扰。传输数字信号所要求的信道带宽应是该信号传输速 率的一半:BW=fc=Rb/2=1/2T ② 基带系统的系统函数H(ω)应具有升余弦滚降特性。 如图2所示:滚降系数:a=[(fc+fa)-fc]/fc
《生产系统建模与仿真》教学大纲
《生产系统建模与仿真》教学大纲 (理论课程) 开课系(部):工程学院课程编号:010396 课程类型:专业课总学时:48 学分:3 适用专业:工业工程开课学期:2014-2015学年第一学期 先修课程:概率论与数理统计、C语言程序设计、系统工程导论 一、课程简述 《生产系统建模与仿真》是面向工程实际的应用型课程,是工业工程系的主导课程之一。学生通过本课程的学习能够初步运用仿真技术来发现生产系统中的关键问题,并通过改进措施的实现,提高生产能力和生产效率。 本课程具有较强的理论性,同时具有较强的实践性和应用性,能够有效增强学生的系统仿真理论基础,提高学生对系统仿真、分析工作的适应性,培养其开发创新能力。 本课程的教学目标是培养学生的设计能力、创新能力和工程意识。课程以制造型生产企业为核心,通过理论教学和实践环节相结合,阐述了离散事件系统建模与仿真技术在生产企业分析中的基本原理和方法。其容涉及计算机仿真技术在生产系统分析中的作用和原理、仿真软件的介绍,重点介绍排队系统、库存系统、加工系统以及输入、输出数据分析。本课程的目的是要求学生通过学习、课堂教育和上机训练,能了解如何运用计算机仿真技术模拟生产系统的布置和调度管理;并熟悉和掌握计算机仿真软件的基本操作和能够实现的功能;使学生了解计算机仿真的基本步骤。 二、课程要求 (一)教学方法 1、启发式课堂讨论 针对关键知识点、典型题和难题,通过教师提问,鼓励学生回答问题或请到讲台前做题,并请其他学生评判或提出不同的答案或不同的解决方法。目的是加强学生自主学习的能力和判断能力,培养主动思考的习惯,启发学生的探索精神。 2、重视在教学中加强知识演进的逻辑规律的讲解 提高学生的逻辑思维能力,培养学生分析问题、解决问题的能力。 3、加强计算机辅助设计、分析 将Flexsim仿真软件引入教学中。应用计算机辅助设计、分析,能方便的改变系统
系统建模与仿真课后作业
、系统、模型和仿真三者之间具有怎样的相互关系 答:系统是研究的对象,模型是系统的抽象,仿真通过对模型的实验以达到研究系统的目的。 、通过因特网查阅有关蒲丰投针实验的文献资料,理解蒙特卡罗方法的基本思想及其应用的一般步骤。 答:蒲丰投针实验内容是这样的:在平面上画有一组间距为a的平行线,将一根长度为L(L (1)实体流图 (2)活动循环图 、以第二章中图2-5所示的并行加工中心系统为对象,建立Petri 网模型。 3214所示Petri 网模型的运行过程,并将分析结果同例3-5相比较。 、任取一整数作为种子值,采用第三题中得到的随机数发生器生成随机数序列的前200项数据,并对其统计性能进行检验。 解:由第3题可得到一个随机数发生器: a=5 b=9 c=3 m=512 取种子值,生成的随机数序列前200项数据如下: n n 5000032458 4 t t P t P P P P t P (2)t3发 生后 t t P t P P P P t P (3)t2发 生后 (4)t1不能 发生 t t P t P P P P t P (5)t4发 生后 Simulink仿真 根据以上的分析论证,将已求得的个函数参数带入动态结构图中,初步得到图3动态结构图。 图3 根据理论得到的各参数设计后可得到理论设计条件下输出转速曲线图4。 图4 可以清楚地看出,输出转速有很大的超调最大可达84.1%,调整时长为2.65s 之久,这是我们所不能接受的。 速度调节器的设计参数与实际调试结果相差比较大,使系统对负载扰动引起的动态速降(升)缺乏有效的抑制能力,存在起动和制动过程中超调量大,突加(减)负载时,动态速降(升)大等缺点。 所以,我们对ACR和ASR的参数进行整定,特别是速度控制器的参数。我们就对其作出了适当的调整,将速度控制器的传递函数改成,将电流调节器的传递函数改为。当然,这是需要时间和经验的。 校正后的动态结构图如图5所示 图5 校正后的输出转速曲线如图6所示 图六 电流环跟随性能仿真实验 如上文所述:电流环的作用就是保持电枢电流在动态过程中不超过允许值,在突加控制作用时不希望有超调,或者超调量越小越好。这就需要我们对电流环的跟随性能加以分析。将电流环从系统中分离出来(将电枢电压对电流环影响看成是扰动)。电流环模型如图7所示: 图7 通过如下命令可以得到电流环的bode图和nyquist图以及电流环的单位阶跃响应。 [num,den]=linmod('current_loop') sys=tf(num,den) figure(1) margin(sys) [mag,phase,w]=bode(sys); [gm,pm,wcg,wcp]=margin(mag,phase,w) Figure(2) Nyquist(sys) Figure(3) Step(sys) 我们还可以得到以下的数据: gm = 4.2925 pm =47.7281 wcg =345.3056 cp =164.6317 剪切频率ωc=164.6317rad/s;相角相对裕度δ=47.7281°;-∏穿越频率ω g=345.3056rad/s 幅值相对裕度Lh=20lg(4.2925)=12.65dB 新疆财经大学实验报告 课程名称:物流管理综合实验 实验项目名称:系统建模与仿真 学号: 2013104059 姓名:曾华艳 班级:物流管理11-1 指导教师:林秋平 2014年 6月 2日 新疆财经大学实验报告 《铁路局联通营业厅排队仿真分析实验报告》 一、实验目的 (一)通过对铁路局联通营业厅运作的观察,建立计算机仿真全过程,对营业厅运作进行数据采集、建模和仿真分析,为联通营业厅提出改进和优化方案的建议。 (二)通过这次实验活动,全面了解计算机仿真技术在物流领域、生产制造领域等离散事件系统中的应用,理解仿真技术如何辅助管理人员进行决策。 (三)通过分组合作的形式,提供一种系统仿真工作中常见的团队协作方式的实践体验,培养协调工作、共同完成任务的能力。 二、系统描述 人们进入联通营业厅,首先要通过取票系统拿到自己的号,先在等待区等待叫号系统报自己的号。一共有2个服务台,2个服务台同时工作,哪个服务台叫到几号,拿这个号码的人就去哪个服务台,叫号系统按顺序叫号,2个服务台叫号不会发生重复现象。我们组决定针对铁路局联通营业厅叫号排队办理业务的过程进行研究,因此我们采集了仿真模型相关数据。记录了每位顾客到达时间、等待时间和离开时间。将收集的数据整理,录入excel中,并计算出了顾客的到达时间间隔和被服务时间,再利用flexsim建立仿真模型进行仿真分析与优化。 三、小组分工 (一)本组成员 1.组长:曾华艳 2.组员:晁芙蓉、陈磊、阿尔孜姑丽、宗泽宁、张振恒 (二)小组分工 1.调查收集数据和模型优化:全体成员 2.数据录入:晁芙蓉、张振恒、阿尔孜姑丽 3.数据处理:宗泽宁、阿尔孜姑丽 4.仿真模型建立与分析:陈磊、曾华艳 5.实验报告:曾华艳、晁芙蓉、宗泽宁 6.PPT 制作:张振恒、陈磊 控制系统仿真大作业 1、曲线拟合的Matlab实现和优化度检验 通过一个实际的例子,介绍最小二乘曲线拟合法的基本原理,对最小二乘曲线拟合法的Matlab实现方法进行研究,并给出曲线拟合Matlab实现的源程序。论述了Matlab软件在做曲线拟合时的用法,并进行曲线的拟合和相应的图像。 2、基于Matlab的液位串级控制系统 运用组态王和Matlab混合编程的方法设计了一个双容(两个水箱串联)液位串级在线控制系统,由组态王编制人机交互界面,用Matlab完成控制算法,二者通过DDE进行实时数据交换;采用串级控制策略,减小二次干扰的影响,验证其方法的有效性。 3、基于Matlab的变压器差动保护闭环仿真研究 应用Matlab建立了微机保护仿真系统,并对不同原理的变压器差动保护进行了仿真和比较.仿真系统采用积木式结构,根据微机保护的实现原理构建模块,实现保护的闭环仿真,对保护的动作过程进行分析. 4、基于MATLAB/SIMULINK的交流电机调速系统建模与仿真 根据直接转矩控制原理,利用MATLAB/SIMULINK软件构造了一个交流电机调速系统,该系统能够很好地模拟真实系统,实现高效的调速系统设计。仿真结果验证该方法的有效性。 5、基于MCGS和MATLAB的薄膜厚度控制系统仿真 以MCGS组态软件和MATLAB为平台,设计和仿真了一个薄膜厚度控制系统.MCGS完成硬件接口的设置、数据的实时采集、人机对话、以动画的方式显示控制系统的运行情况,MATLAB完成PID参数的自动整定,并利用动态数据交换(DDE)技术建立两者间的通讯.并分析其仿真结果。 6、Matlab在动态电路分析中的应用 用Matlab计算动态电路,可得到解析解和波形图.一阶电路先计算3要素,后合成解 Simulink 仿真 根据以上的分析论证,将已求得的个函数参数带入动态结构图中,初 步得到图3动态结构图 图3 根据理论得到的各参数设计后可得到理论设计条件下输出转速曲线 图4 可以清楚地看出,输出转速有很大的超调最大可达84.1%,调整时长为2.65s 之久,这是我们所不能接受的 速度调节器的设计参数与实际调试结果相差比较大,使系统对负载扰动引起的 动态速降(升)缺乏有效的抑制能力,存在起动和制动过程中超调量大,突加(减)负载时,动态速降(升)大等缺点。 所以,我们对ACR和ASR的参数进行整定,特别是速度控制器的参数。我 + 1 们就对其作出了适当的调整,将速度控制器的传递函数改成,将电流调节器的传递函数改为当然,这是需要时间和经验的。 校正后的动态结构图如图5所示 校正后的输出转速曲线如图6所示 |Time cffeel 0 图六 电流环跟随性能仿真实验 如上文所述:电流环的作用就是保持电枢电流在动态过程中不超过允许值,在突加控制作用时不希望有超调,或者超调量越小越好。这就需要我们对电流环的跟随性能加以分析。将电流环从系统中分离出来(将电枢电压对电流环影响看成是扰动)。电流环模型如图7所示: Transfer Fcn1 图7 通过如下命令可以得到电流环的bode图和nyquist图以及电流环的单位阶跃响 应。 [nu m,de n]=li nm od('curre nt_loop') sys=tf( nu m,de n) figure(1) margi n(sys) [mag,phase,w]=bode(sys); [gm,pm,wcg,wcp]=margi n( mag,phase,w) Figure(2) Nyquist(sys) Figure?) Step(sys) 我们还可以得到以下的数据 gm = 4.2925 pm =47.7281 wcg = 345.3056 cp = 164.6317 剪切频率3 c=164.6317rad/s;相角相对裕度S = 47.7281 °; -n穿越频率3 g=345.3056rad/s 幅值相对裕度Lh=20lg (4.2925) =12.65dB 通信系统建模与仿真课程设计 2008 级通信工程专业0813072 班级 题目基于SIMULINK的2ASK频带传输系统的仿真姓名李春艳学号081307211 指导教师胡娟闫利超贾晓兰 2011年6月1日 1 任务书 试建立一个ASK 频带传输模型,产生一段随机的二进制非归零码的基带信号,对其进行ASK 调制后再送入加性高斯白噪声(AWGN )信道传输,在接收端对其进行ASK 解调以恢复原信号,观察还原是否成功,改变AWGN 信道的信噪比,计算传输前后的误码率,绘制信噪比-误码率曲线,并与理论曲线比较进行说明。另外,对发送信号和接收信号的功率谱进行估计。 2 二进制振幅键控(2ASK )的理论分析 2.1 2ASK 调制原理 振幅键控是正弦载波的幅度随数字基带信号而变化的数字调制。当数字基带信号为二进制时,则为二进制振幅键控。 设发送的二进制符号序列由0、1序列组成,发送0符号的概率为P ,发送1符号的概率为1-P ,且相互独立。该二进 wct nTs t ang wct t s t sASK cos ])([cos )()(∑-== 制符号序列可表示为 其中: ?? ?=10an 0是以概率p 出现,而1是以概率1-p 出现。 二进制振幅键控信号时间波型如图1 所示。 由图1 可以看出,2ASK 信号的时间波形e2ASK(t)随二进制基带信号s(t)通断变化,所以又称为通断键控信号(OOK 信号)。 二进制振幅键控信号的产生方法如图2 所示,图(a)是采用模拟相乘的方法实现, 图(b)是采用数字键控的方法实现。 由图1 可以看出,2ASK 信号与模拟调制中的AM 信号类似。所以,对2ASK 信号也能够采用非相干解调(包络检波法)和相干解调(同步检测法),其相应原理方框图如图3 所示。2ASK 信号非相干解调过程的时间波形如图4 所示。 实验1 Witness仿真软件认识 一、实验目的 熟悉Witness 的启动;熟悉Witness2006用户界面;熟悉Witness 建模元素;熟悉Witness 建模与仿真过程。 二、实验内容 1、运行witness软件,了解软件界面及组成; 2、以一个简单流水线实例进行操作。小部件(widget)要经过称重、冲洗、加工和检测等操作。执行完每一步操作后小部件通过充当运输工具和缓存器的传送带(conveyer)传送至下一个操作单元。小部件在经过最后一道工序“检测”以后,脱离本模型系统。 三、实验步骤 仿真实例操作: 模型元素说明:widget 为加工的小部件名称;weigh、wash、produce、inspect 为四种加工机器,每种机器只有一台;C1、C2、C3 为三条输送链;ship 是系统提供的特殊区域,表示本仿真系统之外的某个地方; 操作步骤: 1:将所需元素布置在界面: 2:更改各元素名称: 如; 3:编辑各个元素的输入输出规则: 4:运行一周(5 天*8 小时*60 分钟=2400 分钟),得到统计结果。5:仿真结果及分析: Widget: 各机器工作状态统计表: 分析:第一台机器效率最高位100%,第二台机器效率次之为79%,第三台和第四台机器效率低下,且空闲时间较多,可考虑加快传送带C2、C3的传送速度以及提高第二台机器的工作效率,以此来提高第三台和第四台机器的工作效率。 6:实验小结: 通过本次实验,我对Witness的操作界面及基本操作有了一个初步的掌握,同学会了对于一个简单的流水线生产线进行建模仿真,总体而言,实验非常成功。 通信系统建模与仿真作业 在高斯白噪声的情况下,求2ASK、2PSK、2FSK的误码率。解答: (1)、2ASK相干解调误码率理论值与仿真值代码如下: A=1; N=10000; FC=4; R=100; SNRdB=0:1:10; Pe=1/2*erfc(sqrt(0.25*10.^(SNRdB/10))); semilogy(SNRdB,Pe,'R');hold on;grid on; n=1:N*R; xn=randi([0 1],1,N); wc=sin(n/R*2*pi*FC); x=wc.*xn(ceil(n/R)); %调制 Vt=sum(0.5*wc([1:R]).^2); %判决门限 for i=1:length(SNRdB) y=awgn(x,SNRdB(i)-10*log10(R),'measured'); %加高斯白噪声 y=y.*wc; for j=1:N yn(j)=sum(y([(j-1)*R+1:j*R]))>Vt; end ErrorCount=length(find(xor(xn,yn))); Pe(i)=ErrorCount/N; end semilogy(SNRdB,Pe); title('2ASK相干解调误码率'); legend('误码率理论值','误码率仿真值'); xlabel('Eb/N0(dB)'); ylabel('误码率'); (2)、2ASK非相干解调误码率理论值与仿真值代码如下: A=1; N=10000; FC=2; R=64; SNRdB=0:1:10; Pe=1/2*exp(-0.25*10.^(SNRdB/10)); semilogy(SNRdB,Pe,'R');hold on;grid on; n=1:N*R; xn=randi([0 1],1,N); wc=sin(n/R*2*pi); x=wc.*xn(ceil(n/R));%调制 Vt=sum(0.5*wc([1:R]).^2);%判决门限 for i=1:length(SNRdB) y=awgn(x,SNRdB(i)-10*log10(R),'measured');%加高斯白噪声 for j=1:N % ch3example1A.m clear; f_p=2400; f_s=5000; R_p=3; R_s=25; % 设计要求指标 [n, fn]=buttord(f_p,f_s,R_p,R_s, 's'); % 计算阶数和截止频率 Wn=2*pi*fn; % 转换为角频率 [b,a]=butter(n, Wn, 's'); % 计算H(s) f=0:100:10000; % 计算频率点和频率范围 s=j*2*pi*f; % s=jw=j*2*pi*f H_s=polyval(b,s)./polyval(a,s); % 计算相应频率点处H(s)的值 figure(1); subplot(2,1,1); plot(f, 20*log10(abs(H_s))); % 幅频特性 axis([0 10000 -40 1]); xlabel('频率Hz');ylabel('幅度dB'); subplot(2,1,2); plot(f, angle(H_s)); % 相频特性 xlabel('频率Hz');ylabel('相角rad'); figure(2); freqs(b,a); % 也可用指令freqs直接画出H(s)的频率响应曲线。 % ch3example1B.m clear; f_p=2400; f_s=5000; R_p=3; R_s=25; % 设计要求指标 [n, fn]=ellipord(f_p,f_s,R_p,R_s,'s'); % 计算阶数和截止频率 Wn=2*pi*fn; % 转换为角频率 [b,a]=ellip(n,R_p,R_s,Wn,'s'); % 计算H(s) f=0:100:10000; % 计算频率点和频率范围 s=j*2*pi*f; % s=jw=j*2*pi*f H_s=polyval(b,s)./polyval(a,s); % 计算相应频率点处H(s)的值 figure(1); subplot(2,1,1); plot(f, 20*log10(abs(H_s))); % 幅频特性 axis([0 10000 -40 1]); xlabel('频率Hz');ylabel('幅度dB'); subplot(2,1,2); plot(f, angle(H_s)); % 相频特性 xlabel('频率Hz');ylabel('相角rad'); figure(2); freqs(b,a); % 也可用指令freqs直接画出H(s)的频率响应曲线。 % ch3example2A.m f_N=8000; % 采样率 f_p=2100; f_s=2500; R_p=3; R_s=25; % 设计要求指标 Ws=f_s/(f_N/2); Wp=f_p/(f_N/2); % 计算归一化频率 [n, Wn]=buttord(Wp,Ws,R_p,R_s); % 计算阶数和截止频率 [b,a]=butter(n, Wn); % 计算H(z) figure(1); freqz(b,a, 1000, 8000) % 作出H(z)的幅频相频图, freqz(b,a, 计算点数, 采样率) 西安理工大学 研究生课程论文/研究报告 课程名称:电力电子系统建模与分析 任课教师: 完成日期:2016 年7 月 5 日 专业:电力电子与电力传动 学号: 姓名: 同组成员: 成绩: 题目要求 某用户需要一直流电源,要求:直流输出24V/200W,输出电压波动及纹波均<1%。用户有220V交流电网(±10%波动变化)可供使用: (1) 设计电源主电路及其参数; (2) 建立电路数学模型,获得开关变换器传函模型; (3) 设计控制器参数,给出控制补偿器前和补偿后开环传递函数波特图,分 析系统的动态和稳态性能; (4) 根据设计的控制补偿器参数进行电路仿真,实现电源要求; (5) 讨论建模中忽略或近似因素对数学模型的影响,得出适应性结论(量化 性结论:如具体开关频率、具体允许扰动幅值及频率等)。 主要工作 本次设计主要负责电源主电路及其参数的的设计,以及建立电路数学模型并获得开关变换器传函模型这两部分内容,具体如下: (1) 本次设计电源主电路及其参数,采用从后向前的逆向设计思想。首先根据系统输出要求,设计了后级DC/DC型Buck电路的参数。接着设计了前级不控整流电路以及工频变压器的参数。考虑到主电路启动运行时的安全性,在主电路中加入了软启动电路; (2) 本次DC/DC变换器的建模并没有采用传统的状态空间平均方法,而是采用更为简单、直观的平均开关建模方法,建立了Buck变换器小信号交流模型。最后,推到出了开关变换器的传递函数模型,并给出了Buck电路闭环控制框图。 1 设计主电路及其参数 1.1主电路设计 根据题目要求,系统为单相交流220V/50Hz 输入,直流24V/200W 输出。对于小功率单相交流输入的场合,由于二极管不控整流电路简单,可靠性高,产生的高次谐波较少,广泛应用于不间断电源(UPS)、开关电源等场合。所以初步确定本系统主电路拓扑为:前级AC-DC 电路为电源经变压器降压后的二极管不控整流,后级DC-DC 电路为Buck 斩波电路,其中Buck 电路工作在电感电流连续模式(CCM ),前后级之间通过直流母线和直流电容连接在一起。系统主电路结构如图1-1所示。 AC 220V/50Hz L C 1 C 2R D S 图1-1 系统主电路结构图 1.2主电路参数设计 本次设计电源主电路参数,采用从后向前的逆向设计思想。先对后级DC/DC 型Buck 电路的参数进行设计,接着对前级不控整流电路以及工频变压器的参数进行设计。下面分别对后级的Buck 电路和前级经变压器降压后的不控整流电路各参数进行分析设计。 1.2.1 输出电阻计算 根据系统电路参数:220,50;24;200i o U V Hz U V P W ===,可计算: 输出电流: /200/248.33O O I P U W V A ==≈ (1-1) 负载等值电阻: /24/8.33 2.88O O R U I V A ==≈Ω (1-2) 一、物流系统建模与仿真软件简介 由于物流系统变得越来越复杂并且内部关联性越来越强。仿真是公司检验其物流系统及决策是否真的高效的唯一可用技术了。在设计一个新的工厂或系统,对已由系统添加新设备或重新优化,仿真都是非常必要的。同时仿真还用来提供直觉的和经验的决策支持。在当今市面上,仿真可用使用专用软件来实现。由于存在着如此多的仿真软件,如何正确的选择软件至关重要。下面列举出典型的系统仿真软件[3]。 软件名称简介 (1)20-sim 20-sim是由Twente大学控制实验室开发的运行于Windows系统下的建模与仿真软件。作为著名软件包TUTSIM的后续产品,它完全支持图形建模,让用户在直观和友善的方式对动态系统进行设计和分析,同MATLAB和Simulink可以方便的进行建模与仿真的交互。使用20-sim,我们可以仿真动态系统(例如电力、机械、水动力系统或它们的组合系统)的各种行为。 (2)arena该软件可以用来模拟服务、制造、运输、物流、供应链和其它系统。(3)Automod该软件提供了真实的三维虚拟现实动画,使得仿真模型非常用以理 解;提供了高级的特征让用户可以仿真复杂的活动,如机器人、设 备工具、生产线等的运动和转动。该软件还为用户提供了一套基于 专家系统的物料搬运系统,它是根据工业自动化的真实运行经验开 发的。这些包括输送链、自动存储和检索系统,桥式起重机等。(4)Awesim Awesim提供生产系统动态模型的仿真机。动画使用图形界面构建, 用户可以对交互式仿真进行特定的控制。 (5)Easy5由波音公司开发的用来模拟和仿真包含水力、风力、机械、热、电 子和数字等子系统的动态系统软件包。包括了一整套控制系统建 模、分析和设计功能。 (6)Idef该软件是一种流程图析软件,可以非常容易的适用流程图来绘制和 表述流程。它能够提供比传统流程图更多的信息。流程中包含的流 程、流程约束、人和其他资源能够被整合到一起。 (7)Intrax该软件能够提供许多被建模和仿真实际流程的管理决策。它能够被 用来执行战略(同战略视图,同步价值链视图相符合的现实),流 程改善(工序改善、生产力改善、节约循环时间),同步价值链(动 态视觉,同步约束)和日常运作(可对比的运作替代方案,短期变 化影响力的检验)等的模拟和仿真。 (8)Manufacturing Engineering 该软件提供离散仿真功能来解决制造问题和设计制造方案。它在广阔的应用领域中预测产出率,人工和其他的绩效。 (9)Matlab该软件是组合的数字计算、高级图形技术和可视化、高级编程语言 的集成计算机算环境。Simulink式用来对动态系统进行建模、仿真 和分析的交互式工具。它可以构建图形化的结构图,模拟动态系统, 评估系统绩效和精炼设计。 (10)Modsim该软件可以用来仿真像港口,铁路网和航空管制等的管理模型。还 可以用来仿真制造系统。 (11)Promodel该软件可以对制造系统、仓储系统和物流系统的评估、规划或重新 设计进行仿真。典型应用包括精益制造的实施,周期事件的降低, 设备投资决策,产出率和能力分析,识别和排除瓶颈,资源分配等。系统建模与仿真仿真作业结果
曾华艳组离散事件系统仿真大作业
大作业题目
系统建模与仿真仿真作业结果
simulink通信系统建模与仿真
系统建模与仿真实验报告
通信系统建模与仿真作业
Matlab通信系统建模与仿真例题源代码-第三章
电力电子电路建模与分析大作业要点
物流系统建模与仿真软件简介