伺服参数初始化操作

第三讲伺服参数的初始化
FANUC0i-MateD系列画面说明
功能键:
:按此键显示位置显示画面。:按此键显示偏置/设定画面。
:按此键显示程序画面。:按此键显示系统画面。
:按此键显示信息画面。:按此键显示图形画面。
1、伺服参数的作用
实现数控系统与机床结构和机床各种功能的匹配,使数控机床的性能达到最佳。
2、伺服参数初始化设定的页面介绍P105
(1)在MDI方式下,按下【OFS/SET】,再单击【设定】,选择设定页面,确认“写参数=1”,如图4-1所示。
图4-1 设定画面图4-2 修改参数
(2)设置参数#3111.0=1(设1后应关机,再开机)允许显示伺服参数初始化设定页面和伺服参数调整页面。
(3)显示伺服参数初始化设定页面的步骤:
1)按功能键【SYSTEM】和软键【+】,出现如图4-4所示画面。
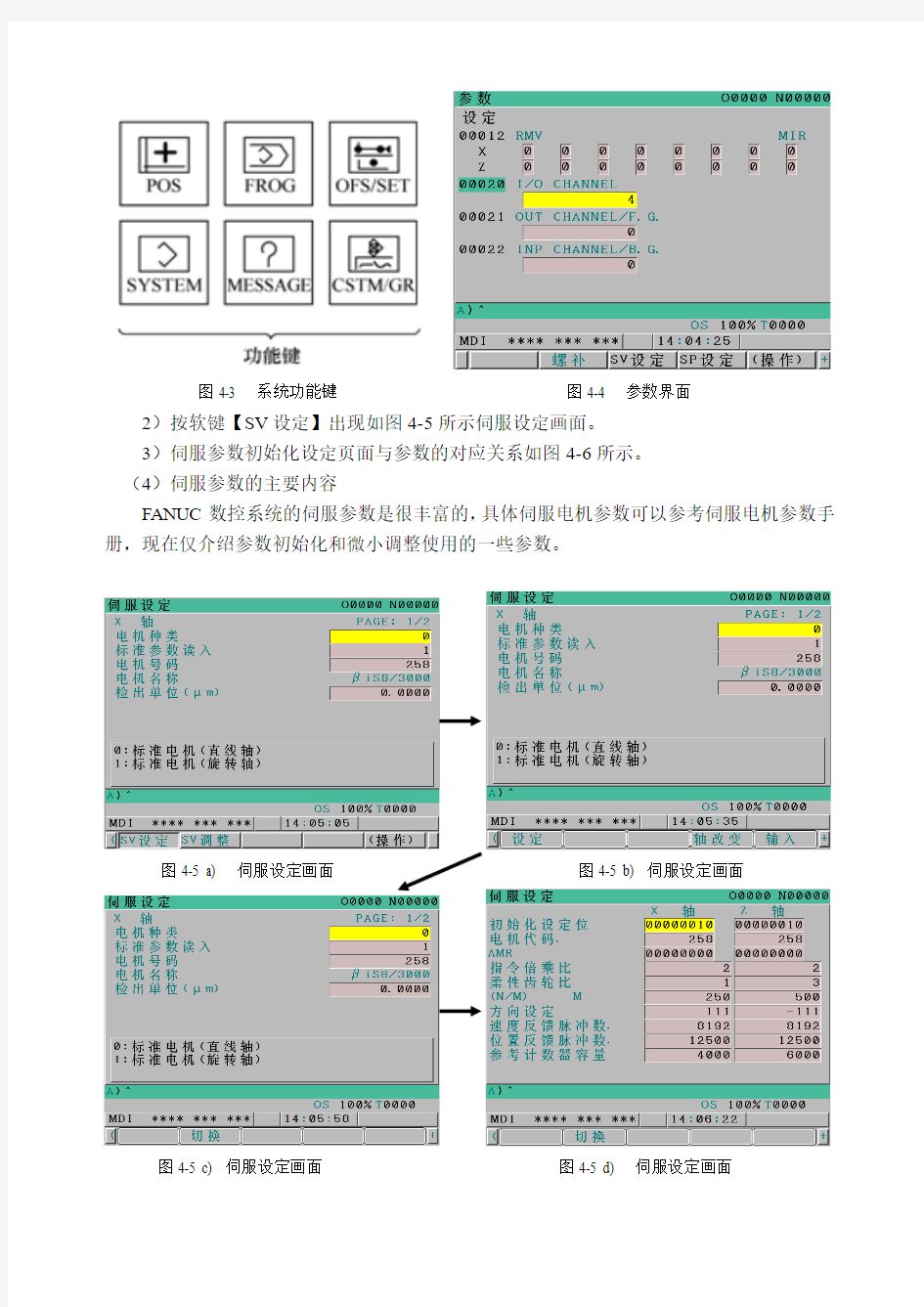
图4-3 系统功能键图4-4 参数界面2)按软键【SV设定】出现如图4-5所示伺服设定画面。
3)伺服参数初始化设定页面与参数的对应关系如图4-6所示。
(4)伺服参数的主要内容
FANUC数控系统的伺服参数是很丰富的,具体伺服电机参数可以参考伺服电机参数手册,现在仅介绍参数初始化和微小调整使用的一些参数。
图4-5 a) 伺服设定画面图4-5 b) 伺服设定画面
图4-5 c) 伺服设定画面图4-5 d) 伺服设定画面
1)初始化设定位
NO 2000
#0(PLC01):设定为“0”时,检测单位为1μm,FANUC系统使用参数2023(速度脉冲数)、2024(位置脉冲数)。设定为“1”时,检测单位为0.1μm,把上面系统参数的数值乘10倍。#1(DGPRM):设定为“0”时,系统进行数字伺服参数初始化设定,当伺服参数初始化后,该位自动变成“1”。
#3(PRMCAL):进行伺服初始化设定时,该位自动变成“1”(FANUC—OC/OD系统无此功能)。根据编码器的脉冲数自动计算下列参数:PRM2043、PRM2044、PRM2047、PRM2053、PRM2054、PRM2056、PRM2057、PRM2059、PRM2074、PRM2076。
2)伺服电机代号
根据所使用的伺服电动机的类型及规格,查出ID代码。
电机型号:βiS8/3000(电机型号:βiS8,最高转速为3000r/min);
电机订货号:A06B-0075-B103(B103表示电机为法兰安装,不带抱闸)。
表FANUC系统αis、βis系列伺服电动机的ID代码
3)AMR(No.2001)
设定电枢倍增比,设定为“00000000”。
4)指令倍乘比(No.1820)
设定伺服系统的指令倍率CMR。CMR=指令单位/检测单位。CMR为1~48时,设定值=2×CMR;CMR为1/2~1/27时,设定值=1/CMR+100。
5)柔性齿轮比N/M(No.2084、No.2085)
对不同的丝杠螺距或机床传动有减速齿轮时,为了使位置反馈脉冲数与指令脉冲数相同而设定进给齿轮比N/M,由于通过系统参数可以修改,所以又称柔性进给齿轮比。
半闭环伺服系统:N/M=(电机1转所需的位置反馈脉冲数/100万)的约分数
全闭环伺服系统:N/M=(电机1转所需的位置反馈脉冲数/电机1转分离型检测装置位置反馈的脉冲数)的约分数
6)方向设定(No.2022)
电机旋转方向。111:正向(从脉冲编码器一侧看沿顺时针方向旋转);-111:负向(从脉冲编码器一侧看沿逆时针方向旋转)。
7)速度反馈脉冲数(No.2023)
速度反馈脉冲数设定为8192。
8)位置反馈脉冲数(No.2024)
半闭环系统中,设定为12500;全闭环系统中,按电机1转来自分离型检测装置的位置
反馈脉冲数设定。
9)参考计数器容量(No.1821)
半闭环系统中,设定为电机1转所需的位置反馈脉冲数或其整数分之一。
(5)CNC重新上电
至此,伺服初始化设定结束。在JOG方式下各轴已能正确运行,运动方向和定位精度已得到保证。
(6)确定初始化位为1。
说明:从维修角度讲,一般不需要伺服参数初始化,只有在维修中更换了不同的伺服电机或机械部分功能做了变更时,才需要伺服参数初始化。
案例分析:
0i-TD系统数控车床,Z轴滚珠丝杠螺距为6mm,伺服电机与丝杠直连,伺服电机规格为αis 8 /4000,机床的检测单位为0.001mm,数控指令单位为0.001mm,如何实现伺服参数初始化设置?
任务:伺服参数初始化
训练目标:
1、掌握伺服放大器(SV M)伺服参数初始化步骤;
2、理解伺服参数初始化设置的含义。
训练步骤:
(1)显示伺服参数初始化设定页面准备
在MDI方式下,按下急停按钮,再按下功能键【OFS/SET】,单击【设定】,选择设定页面,确认“写参数=1"。
设置参数#3111.0为1时(设1后应关机、再开机),允许显示伺服参数初始化设定页面。
(2)显示伺服参数初始化设定页面
按功能键【SYSTEM】和软键【+】、【SV设定】。
(3)明确伺服参数初始化设定页面与参数对应关系。
(4)将Z轴“初始化设定位"设为0。
(5)根据交流伺服电机参数说明书(B-65270CM)设定“电机代码”。
(6)设定AMR为00000000。
(7)设定“指令倍乘比”为2。
(8)根据实验装置具体丝杠螺距(P=6mm)设置柔性齿轮比N/M。
(9)“方向设定”为111,若实际运行后不符合机床坐标系方向,可以再修改。
(10)设定“速度反馈脉冲数”和“位置反馈脉冲数",对应参数分别为参数8192和参
数12500。
(11)设定“参考计数器容量”,根据滚珠丝杠螺距设置。
(12)按功能键【OFS/SET】,再单击【设定】,选择设定页面,确认“写参数=0”,再按【RESET】。根据显示屏提示,关断CNC电源,再打开电源即可。观察是否有报警信息。
(13)验证参数设置是否正确
1)在JOG方式下,按“+Z”键,观察Z轴伺服电机是否运行,并注意运动方向是否与+Z方向一致。
2)在手轮方式下,选择Z轴运行,手轮倍率设为×100,在导轨上记下纵向托板初始位置,观察Z轴坐标移动一个丝杠螺距位移,再观察纵向托板是否移动一个螺距位移。注意托板移动方向,若一致,说明柔性齿轮比N/M设置是正确的;否则设置错误。
说明:伺服电机没有带刀架或工作台或机械丝杠时,可以观察位置显示页面胤坐标移动一个螺距时,电机是否转一圈。
各种伺服调试经验参数
安川/ 富士/ 松下/ 开通 伺服单元调试经验参数 高档数控国家工程研究中心 中国科学院沈阳计算技术研究所有限公司 各种伺服调试经验参数 1、富士交流伺服单元(FALDIC-W 系列) 连接富士交流伺服单元(FALDIC-W)系列伺服单元,有以下几个常用参数需要设置: ?控制模式的设定: 09号参数用于设定控制模式(速度/位置/转矩控制)。一 般情况下: 设定为“0”:位置控制模式 设定为“1”:速度控制模式 设定为“2”:转矩控制模式 使用者,根据具体情况选择控制模式。 ?脉冲指令形式的设定: 对于位置控制模式,使用者还应当设定脉冲指令的工作 方式,03号参数用于设定脉冲指令的工作方式: 设定为“0”:命令脉冲+命令符号 设定为“1”:正转脉冲+反转脉冲 设定为“2”:90°相位差2路信号 ?编码器PG分周比设定: 19号参数用来设定电机每转动一周,编码器返回的脉冲 数量,范围是16~32768,依据用户的设定值设定上位机 的参数。 ?加速时间参数的设定: 35号参数用于设定马达的加速时间,范围是0.000~9.999 秒。使用者可以通过设定此参数,来改变马达的加速时 间。 ?减速时间参数的设定: 36号参数用于设定马达的减速时间,范围是0.000~9.999 秒。使用者可以通过设定此参数,来改变马达的减速时 间。减速时间应尽量与加速时间设置相同的值。 ?自动调谐增益的设定: 07号参数用来设定伺服单元自动/半自动调整模式时的
调谐增益,连接滚珠丝杠的机械装置时,一般情况下此 参数设置的范围为10~15,(建议设置为12以上),此参 数可以抑制过冲/下冲现象。使用者可以根据实际情况设 定。 如果没有异常现象,则其余的参数采用缺省的默认设置值即可。 注意:对于模拟量连接的方式时,还应当将CONT3信号(CN1插座的4号引脚)与+24V地短接,再将驱动器的12号参数设置为15(手动正转方式FWD),模拟信号才可以正常的工作。 2、安川交流伺服单元(ΣII系列) 连接安川的ΣII系列伺服单元,有以下几个常用参数需要设置: ?正转驱动禁止的解除: 参数Pn50A.3用来设定正转驱动禁止的解除,将“.3”位 (第四位)参数由缺省的“2”改为“8”,即可解除正转驱 动禁止。 ?反转驱动禁止的解除: 参数Pn50B.0用来设定反转驱动禁止的解除,将“.0”位 (第一位)参数由缺省的“3”改为“8”,即可解除反转驱 动禁止。 ?编码器PG分周比设定: 参数Pn201用来设定电机每转动一周,编码器返回的脉冲 数量,范围是16~16384,依据用户的设定值设定上位机的 参数。 ?控制模式的设定: 参数Pn000.1用于设定控制模式(速度/位置/转矩控制)。 一般情况下: Pn000.1设定为“0”:速度控制模式 Pn000.1设定为“1”:位置控制模式 Pn000.1设定为“2”:转矩控制模式 使用者,根据具体情况选择控制模式。 ?脉冲指令形式的设定: 对于位置控制模式,使用者还应当设定脉冲指令的工作 方式,参数Pn200.0用于设定脉冲指令的工作方式: Pn200.0设定为“0”:DIR工作方式 Pn200.0设定为“1”:CW+CCW工作方式 Pn200.0设定为“2”:2向脉冲,相位差为90°方式 ?伺服单元额定工作电压的设定: 参数Pn300的值的设定表示马达额定转速时的工作电压, 一般设定为“6V”,使用者可以根据实际情况更改。
富士 伺服接线图与初始化
FUJI伺服(SMART轻惯量)的接线图一、编码器的接线(配线采用双绞屏蔽线) 驱动器侧CN2 电机侧插头 二、动力线的接线 驱动器侧电机侧插头 U 1 1 U V 2 2 V W 3 3 W 地 4 地 三、相关参数设置
注:设置好参数请重新上电。 四、操作说明 线路连好之后即可上电,如果没有出现报警就可进行参数的设定。 上电后面板显示:PSOF 1.按MODE/ESC键多次直到面板上显示:PA01 2.按ENT 键1秒以上,面板显示:P1.01 3.按ENT键1秒以上进行1号参数的设定,按∧∨键改变值的大小,想 移位时按SHIFT/ENT键。改好数值后按ENT键1秒以上,显示值闪烁, 闪烁停止时表明参数值成功写入。 4. 按MODE/ESC返回。 5. 按∧键,面板显示:P1.02,重复第三步的操作设定2号参数。 6. 以同样的方法设定其它参数。 7.全部参数设完之后请务必先关掉电源,然后重新上电。这样所改的参
数才会生效,重新上电后面板上显示:0000。 注:对于4~5位参数的显示分为两部分,H表示高位,L表示低位。例:NO.01参数值16684在参数中显示为“H16”连续按三下ENT后,显示“L684”,设定时按ENT选择位的位置;NO.02号参数也是如此,显示分别为“H00”和“L050”。 如何进行参数的初始化 按MODE/ESC键多次,直到面板上显示:Fn01,再按∧或∨键直到显示:Fn07,按ENT键1秒以上,面板显示:PA.1n,按ENT键,显示GO,再按ENT 键执行参数的初始化,完成后面板显示:donE。 按MODE/ESC键退出,断电后再重新上电。 再把参数设置一遍即可。 注意:执行参数初始化,出现NG ,表示未进行参数初始化,可能是伺服使能没断,请断掉时能再进行参数初始化。
伺服DR~参数设置
伺服驱动参数设定 1、伺服由OFF—〉ON允许重启的范围 如果电压过低引起电源欠压至停止状态,当伺服信号由off到on ,继续执行位置操作的功能。当最后的位置控制值小于允许重新启动BF区所设定的值时,伺服信号由off到on,重新启动功能执行。 1、伺服放大器(Driver)型号 2、放大器设定 当使用电池时,断电时其位置不会丢失,选择绝对型系统=1。当未选用电池时,断电时其位置会丢失,选择增量型系统=0。(断电一次后参数可生效)。 3、刹车选择 再生制动选择,是否选择制动电阻(制动电阻),选择要正确,否则会引起选件损坏(断电一次后参数可生效)。 4、外部动力刹车 当Z轴使用马达时,须考虑用刹车系统,此处选择=1。(马达需要选择带刹车的型号)(断电一次后参数可生效。
5、马达型号 可通过PLC程序设定相应BF区,30103,30203,30303,30403。 6、马达容量 当马达容量为0.4KW时,设定值=0.4KW*100=40H 当马达容量为22KW时,设定值=22KW*100=2200H 一定得设定,否则Driver将报Ab。 7、伺服马达额定转速 1=1000r/min,2=2000r/min,3=3000r/min。实际数据来源马达手册 8、反馈脉冲、 马达旋转一圈的解析度,与参数Pulse per rotation相等。(断电一次后参数可生效) 9、旋转方向 用于定位,JOG,MPG动作的方向,如果下正轉命令,機構是往負的方向動,则改变此参数,重要。(断电一次后参数可生效) 10、自动调整 惯量,增益,刚性 (1)插补模式:插补模式的增益调整是指系统有两根以上的轴时,需要调整各轴伺服系统的位置环增益并使之匹配,位置环增益1及速度环增益1可用手动设定,其它的参数通过自动调整模式自动设定。 (2)自动调整模式1:12-17项参数无需设置,自动协调产生。手动设定11:响应频率。 (3)自动调整模式2:设置固定转动惯量比,响应频率可手动调整,下列参数自动产生。
伺服调试步骤及注意点
伺服调试步骤和注意点 用途:介绍FANUC系统伺服调试的方法及步骤
文件使用的限制以及注意事项等 文件版本更新的纪录 修订日期版本号文件名称修订内容修订人2009年11月 1.0 伺服调试步骤和注意点首次发布徐少华
目录 1、伺服调试概述 (2) 1.1伺服优化的对象 (2) 1.2伺服优化的方法 (2) 2、手动一键设定one shot (3) 2.1、one shot功能介绍 (3) 2.2、参数设定支持画面的调用 (3) 2.3手动加入滤波器的方法 (5) 2.4伺服增益的自动调整 (5) 2.5典型加工形状的测试 (7) 3、伺服软件自动调整导航器 (8) 3.1自动调整导航器介绍 (8) 3.2导航器调整具体步骤: (9) 4、servo guide手动调整 (14) 4.1伺服三个环(电流环、速度环、位置环)调整 (14) 4.1.1、电流环的调整:设定HRV控制模式 (14) 4.1.2、速度环的调整:合理提高速度环增益(100%~600%) (16) 4.1.3、位置环的调整:一步到位设定位置环增益为4000~8000 (27) 4.2加减速时间常数的调整 (28) 4.2.1加减速时间常数的分类 (28) 4.2.2一般控制(不使用高速高精度功能)加减速时间常数的调整 (30) 4.2.3高速高精度模式下时间常数的确认 (34) 5、典型加工形状调整、检测 (38) 5.1圆的调整 (38) 5.1.1圆度的调整 (38) 5.1.2圆大小调整 (39) 5.1.3圆象限的调整 (39) 5.2方的调整 (50) 5.3、1/4圆弧的调整 (52)
伺服驱动器参数设置方法
伺服驱动器参数设置方法 在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。 1.位置比例增益:设定位置环调节器的比例增益。设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调。参数数值由具体的伺服系统型号和负载情况确定。 2.位置前馈增益:设定位置环的前馈增益。设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。不需要很高的响应特性时,本参数通常设为0表示范围:0~100% 3.速度比例增益:设定速度调节器的比例增益。设置值越大,增益越高,刚度越大。参数数值根据具体的伺服驱动系统型号和负载值情况确定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡的条件下,尽量设定较大的值。 4.速度积分时间常数:设定速度调节器的积分时间常数。设置值越小,积分速度越快。参数数值根据具体的伺服驱动系统型号和负载情况确定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡的条件下,尽量设定较小的值。 5.速度反馈滤波因子:设定速度反馈低通滤波器特性。数值越大,截止频率越低,电机产生的噪音越小。如果负载惯量很大,可以适当减小设定值。数值太大,造成响应变慢,可能会引起振荡。数值越小,截止频率越高,速度反馈响应越快。如果需要较高的速度响应,可以适当减小设定值。 6.最大输出转矩设置:设置伺服驱动器的内部转矩限制值。设置值是额定转矩的百分比,任何时候,这个限制都有效定位完成范围设定位置控制方式下定位完成脉冲范围。本参数提供了位置控制方式下驱动器判断是否完成定位的依据,当位置偏差计数器内的剩余脉冲数小于或等于本参数设定值时,驱动器认为定位已完成,到位开关信号为 ON,否则为OFF。 在位置控制方式时,输出位置定位完成信号,加减速时间常数设置值是表示电机从0~2000r/min的加速时间或从2000~0r/min的减速时间。加减速特性是线性的到达速度范围设置到达速度在非位置控制方式下,如果伺服电机速度超过本设定值,则速度到达开关信号为ON,否则为OFF。在位置控制方式下,不用此参数。与旋转方向无关。7.手动调整增益参数 调整速度比例增益KVP值。当伺服系统安装完后,必须调整参数,使系统稳定旋转。首先调整速度比例增益KVP值.调整之前必须把积分增益KVI及微分增益KVD调整至零,然后将KVP值渐渐加大;同时观察伺服电机停止时足否产生振荡,并且以手动方式调整KVP参数,观察旋转速度是否明显忽快忽慢.KVP值加大到产生以上现象时,必须将KVP 值往回调小,使振荡消除、旋转速度稳定。此时的KVP值即初步确定的参数值。如有必要,经KⅥ和KVD调整后,可再作反复修正以达到理想值。 调整积分增益KⅥ值。将积分增益KVI值渐渐加大,使积分效应渐渐产生。由前述对积分控制的介绍可看出,KVP值配合积分效应增加到临界值后将产生振荡而不稳定,如同KVP值一样,将KVI值往回调小,使振荡消除、旋转速度稳定。此时的KVI值即初步确定的参数值。
伺服电机的调试步骤
伺服电机的调试步骤 1、初始化参数 在接线之前,先初始化参数。在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。 2、接线 将控制卡断电,连接控制卡与伺服之间的信号线。以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。复查接线没有错误后,电机和控制卡(以及PC)上电。此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向 对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。通过控制卡打开伺服的使能信号。这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。一般控制卡上都会有抑制零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。如果不能控制,检查模拟量接线及控制方式的参数设置。确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。如果电机带有负载,行程有限,不要采用这种方式。测试不要给过大的电压,建议在1V以下。如果方向不一致,可以修改控制卡或电机上的参数,使其一致。 4、抑制零漂 在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。 5、建立闭环控制 再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。将控制卡和伺服的使能信号打开。这时,电机应该已经能够按照运动指令大致做出动作了。 6、调整闭环参数 细调控制参数,确保电机按照控制卡的指令运动,这是必须要做的工作,而这部分工作,更多的是经验,这里只能从略了。
伺服电机的一般调试步骤
运动控制器以模拟量信号控制伺服电机的一般调试步骤 运动控制器控制伺服电机通常采用两种指令方式: 1,数字脉冲这种方式与步进电机的控制方式类似,运动控制器给伺服驱动器发送“脉冲/方向”或“CW/CCW”类型的脉冲指令信号;伺服驱动器工作在位置控制模式,位置闭环由伺服驱动器完成。日系伺服和国产伺服产品大都采用这种模式。其优点是系统调试简单,不易产生干扰,但缺点是伺服系统响应稍慢。 2,模拟信号这种方式下,运动控制系统给伺服驱动器发送+/-10 V的模拟电压指令,同时接收来自电机编码器或直线光栅等位置检测元件的位置反馈信号;伺服驱动器工作在速度控制模式,位置闭环由运动控制器完成。欧美的伺服产品大多采用这种工作模式。其优点是伺服响应快,但缺点是对现场干扰较敏感,调试稍复杂。 以下介绍运动控制器以模拟量信号控制伺服电机的一般调试步骤:1、初始化参数 在接线之前,先初始化参数。 在控制器上:选好控制方式;将PID参数清零;让控制器上电时默认使能信号关闭;将此状态保存,确保控制器再次上电时即为此状态。在伺服驱动器上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。比如,松下MI NAS A4系列伺服驱动器的速度指令增益参数Pr50用来设置1V指令电压对应的电机转速(出厂值为500),如果你只准备让电机在100
0转以下工作,那么,将这个参数设置为111。 2、接线 将控制器断电,连接控制器与伺服之间的信号线。以下的连线是必须的:控制器的模拟量输出线、使能信号线、伺服输出的编码器信号线。复查接线没有错误后,将电机和控制器上电。此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。用外力转动电机,检查控制器是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置 3、试方向 对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。通过控制器打开伺服的使能信号。此时伺服电机应该以一个较低的速度转动,这就是所谓的“零漂”。一般控制器上都会有抑制零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。如果不能控制,检查模拟量接线及控制方式的参数设置。确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。如果电机带有负载,行程有限,不要采用这种方式。测试不要给过大的电压,建议在1V以下。如果方向不一致,可以修改控制器或电机上的参数,使其一致。 4、抑制零漂 在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。使用控制器或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。由于零漂本身也有一定的随机性,所以,不必要求
Fanuc系统的伺服初始化
日本FANUC数控系统,当系统在初始安装时或现有的伺服驱动、伺服电机更换时,再或因为更换电池等原因,使伺服参数出现错误时,必须对伺服系统进行初始化处理与重新调整。否则数控系统与现有的软硬件无法进行“沟通”。 在进行系统及数字伺服初始化前时,应首先确认以下基本数据,以便进行初始化工作。 1,数控系统的型号。 2,伺服电动机的型号、规格、电动机代码。 3,电动机内装的脉冲编码器的型号、规格。 4,伺服系统是否使用外部位置检测器件,如使用,需要确认其规格型号。 5,电动机每转对应的工作台移动距离。 6,机床的检测单位。 7,数控系统的指令单位。 对于FANUC l6/18/20/21系列数控系统,要想进行伺服初始化,必须先将参数PRM3111之零位设定为“1”,使伺服参数页面可以在CRT上显示(此参数关机
重开后生效)。 按“SYSTEM”键,选择“系统”显示页面。 再按次序依次操作“软功能键”〖SYSTEM〗→〖>〗→〖SV-PRM〗或〗〖SP-PRM〗。
出现了系统伺服初始化画面!现对各项作简要说明,非常重要! 初始设定位:对应系统参数2000.设定时第三位自动变成1,根据脉冲编码器的脉冲数系统自动计算参数2043、2044、2047、2053、2054、2056、2057、2059、2074、2076的值;第一位对是否需要进行初始化设定作出选择;第零位对是否需要对参数2023、2024的值乘以10倍作出选择。 电机ID 号:如同网络一样,数控系统需要知道配套FANUC伺服电机的身份。具体ID号需查日本FANUC系统资料。每种电机的型号对应一个ID号。 任意AMR功能:注意该参数只能设定为00000000。 CMR指令倍比:CMR为1/2-1/27 时,设定值=1/CMR+100;CMR为0.5-48时,设定值=2XCMR; 进给柔性比N/M(F.FG):太复杂,先只能说N对应参数2084,M对应参数2085.对于全闭环与半闭环系统分别有不同的设定方法。 电机回转方向:对应系统参数2022。+111为正向,-111为负向。
伺服驱动器8大参数设置
伺服驱动器8大参数设置 摘要:在自动化设备中,经常用到伺服电机,特别是位置控制,大部 分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电 机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音 情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来 参考。然后设定速度增益和速度积分时间,确保在低速运行时连续,位置 精度受控即可。并给出故障排查技巧。 一、伺服驱动器的8大参数设置: (1)位置比例增益 设定位置环调节器的比例增益。设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调。参数数值由具 体的伺服系统型号和负载情况确定。 (2)位置前馈增益 设定位置环的前馈增益。设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不 稳定,容易产生振荡。不需要很高的响应特性时,本参数通常设为0表示范围:0~100% (3)速度比例增益 设定速度调节器的比例增益。设置值越大,增益越高,刚度越大。参数数值根据具体的伺服驱动系统型号和负载值情况确定。一般情况下,负载惯量越大,设定值越 大。在系统不产生振荡的条件下,尽量设定较大的值。 (4)速度积分常数 设定速度调节器的积分时间常数。设置值越小,积分速度越快。参数数值根据具体的伺服驱动系统型号和负载情况确定。一般情况下,负载惯量越大,设定值越大。 在系统不产生振荡的条件下,尽量设定较小的值。 (5)速度反馈滤波因子 设定速度反馈低通滤波器特性。数值越大,截止频率越低,电机产生的噪音越小。 如果负载惯量很大,可以适当减小设定值。数值太大,造成响应变慢,可能会引起振 荡。数值越小,截止频率越高,速度反馈响应越快。如果需要较高的速度响应,可以 适当减小设定值。 (6)最大输出转矩设置 设置伺服驱动器的内部转矩限制值。设置值是额定转矩的百分比,任何时候,这 个限制都有效定位完成范围设定位置控制方式下定位完成脉冲范围。本参数提供了位 置控制方式下驱动器判断是否完成定位的依据,当位置偏差计数器内的剩余脉冲数小 于或等于本参数设定值时,驱动器认为定位已完成,到位开关信号为 ON,否则为 OFF。
Panasonic伺服参数设定说明
Panasonic(MINAS A系列)伺服參數設定說明:
备注: 1、首先设置驱动器的电子齿轮比和需要马达转一圈回授的脉冲数计算方法如下:MSMA042A1A 通常新代控制器所设精度单位1um/Pules (可在系统参数17中设所 需精度单位) 通常新代控制器所设的倍频数是4 倍(可在系统参数81~100中所设轴 卡的倍频) 计算公式: F= f ×(Pr 46 ×2Pr 4A) /Pr 4B = 10000或(217) 注: F —电机转一圈所需的内部指令脉冲数(编码器的分辨率) f —电机转一圈所需指令脉冲数 马达转一圈回授的脉冲数= 负载转一圈移动量脉冲数÷控制器内部所 设的倍频4 ****** ex:****** 当螺杆的节距是10mm,马达选用A 型编码器分辨率,采用直传连轴器 那齿轮比计算如下: 负载转一圈移动量脉冲数= 10mm÷1um/Pules =104 Pules M / N = 1 / 1 F(10000) = f(10000) ×{ Pr 46 ×2Pr 4A) ÷Pr 4B 把Pr 4A = 0 1、Pr 46 = 10000 2、Pr 4B = 10000 2、设定上表中的驱动器参数,值为后面的设定值;Pr 4A、Pr 46、Pr 4B为上面 公式根据实际情况计算出来的值;Pr 10、Pr 11、Pr 12先不修改数值,为出厂值; 3、调整机台的刚性,先进行X、Y、Z 轴的来回运动,通过自动整定调谐驱动 器参数值,按加1数值增大;通常调节到机台出现震动或有声音后,降回原一级。注意一点:调完后,需把X、Y、Z的位置增益Pr 10设成一样大; 注意:齿轮比设错,编码器会无回授,同时控制器发遗失位置命令、严重追随误差警报。
FANUC伺服参数的初始化设置
FANUC数字伺服参数的初始化设置 1-4 数字伺服参数的初始化设置 由于数字伺服控制是通过软件方式进行运算控制的,而控制软件是存储在伺服ROM中。通电时数控系统根据所设定的电机规格号和其它适配参数——如齿轮传动比、检测倍乘比、电机方向等,加载所需的伺服数据到工作存储区(伺服ROM中写有各种规格的伺服控制数据),而初始化设定正是进行电机规格号和其它适配参数的设定。 设定方法如下: 1. 在紧急停止状态,接通电源。 2. 确认显示伺服设定调整画面的参数 SVS (#0)=1 (显示伺服画面) * 按照下面顺序,显示伺服参数的设定画面 按 [SYSTEM] 健,再按翻页(扩展)键,找到软件键 [SV-PRM] * 使用光标、翻页键,输入初始设定必要的参数 (1)初始设定位 #3(PRMCAL)1:进行参数初始设定时,自动变成1。根据脉冲编码器的脉冲数自动计算下列值。 PRM 2043(PK1V),PRM 2044(PK2V),PRM 2047(POA1), PRM 2053(PPMAX),PRM 2054(PDDP), PRM 2056(EMFCMP), PRM 2057(PVPA),PRM 2059(EMFBAS), PRM 2074(AALPH),PRM 2076(WKAC) #1(DGPRM)0:进行数字伺服参数的初始化设定。 1:不进行数字伺服参数的初始化设定。 #0(PLC01)0:使用PRM 2023,2024的值。 1:在内部把PRM 2023,2024的值乘10倍。 (2)电机ID号 选择所使用的电机ID号,按照电机型号和规格号(中间4位:A06B-XXXX-BXXX)列于下面的表格中。对于本手册中没叙述到的电机型号,请参照α系列伺服放大器说明书。 例: □αCi系列伺服电机
大豪伺服参数调整简易说明V1.2
大豪伺服参数调整简易说明 参数调整前请参考阅读《大豪伺服高速机调试操作手册》,以便于熟悉操作。大豪伺服框架主要针对各个针长进行控制,因此驱动器中对应有相关参数,详见 许则升级成最新的主控程序和驱动器程序 一、确认XY通讯地址(需重新上电才能生效) 大豪伺服框架采用通信方式进行指令控制,因此务必把XY轴对应的驱动器地址设对(X向驱动器参数PA01设为0001, Y向驱动器参数PA01设为0002)。如果设置错误将会造成通信报错或者绣作花样变形走位。 二、设定电子齿轮比PA02、PA03(需重新上电才能生效)电子齿轮比设置规律为: A、框架轴套采用0.45对应移框0.1mm的机器,则电子齿轮比的设置为
电子齿轮比分子(PA02) 二级传动减速装置大轮 半径 电子齿轮比分母(PA03) . 二级传动减速装置小轮半径 B 、框架轴套采用0.36对应移框0.1mm 的机器,则电子齿轮比的设置为 电子齿轮比分子(PA02) 二级传动减速装置大轮半径 10 - 电子齿轮比分母(PA03) 二级传动减速装置小轮 半径 注:如果是采用三洋伺服参数设置的机器,则可以根据上述的AB 两条折算。 或者用大豪伺服电子齿轮比=1.25 X 三洋伺服电子齿轮比来计算。 另设置好伺服驱动器电子齿轮比后, 可以通过手动移框一段距离来反馈是否 正确。手动移框一小段距离(比如5mm )后,将XY 位移清零,在台板上做标记, 接着移框100m m ,停止移框后在台板上做标记,用尺子测量这两个标记之间的 距离是否也是100mm 。如果测量结果是100mm ,那说明驱动器的电子齿轮比设 置是对的。 具体步骤如下: ① 设置成低速移框;按电脑操作面板上的 〔兰 键,屏幕上显示为 礎” * m “十 &TI : 的妙 11 ”K I -GD I J -X t 1 -¥ [ -va n | -tvr 出.o i FXf -+IIQ.A ] tvl -15.0 ] iSTI TI Mb li 32 PtRCEHr : 7 Ji ②向X 方向移框一段距离(比如5mm 后,按电脑操作面板上的1工 键,将位移清零,屏幕上 X [ +0.0 ] 显示 ,在台板上做标记 X r-1000 1 ] Y [+0.0 ) ④停止移框,在台板上做标记 g 手动高速移框; :手动低速移框 ③接着按这个方向继续移动100mm,屏幕上, X [ 4 100,0 ] 显示¥ I 1或者
A5伺服参数设置
松下A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定: 用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。但是,为优化机床性 松下伺服器修改参数设定值后,须选择EEPROM 写入模式。 方法如下: ①按MODE键,选择EEPROM写入显示模式EE_SEt; ②按SET键,显示EEP -; ③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。 三、电子齿轮比的计算(针对松下A5驱动),有两种计算方式:
1、松下专有方式:Pr0.08* 电机每旋转一次的指令脉冲数=螺距/脉冲当量 2、通用计算方式:当Pr0.08参数为0时,电子齿轮比=分子/分母=Pr0.09/Pr0.10=编码器分辨率*脉冲当量*机械减速比/螺距(=10000*0.001*1/5=2/1) 四、惯量比的调节Pr0.04惯量比 该参数对机床运行的平稳性、加工效果等起到了很重要的作用,比如:机床振动、机床电机发出异常声音、加工出来的圆不圆、加工的工件粗糙、加工的工件变形等,只有设置合理的惯量比,机床才能发挥出最大的优势,才能加工出更好的工件。 惯量比的设定有两种方法: 其一、手动设定直接手动将估算的惯量比设置到【Pr0.04】里。如果手动设置,需要你估算该机床的惯量比,既然估算,很难达到理想的惯量比,机床就很难发挥出最大的优势。 其二、自动设定机床运动。只有适合机床的惯量比,加工出来的工件才是最好的 下面我将详细介绍惯量比的自动调节: 1) 【 【 2) X轴Y 轴Z 3) 4) 【 【 5) 6) 7) 8) 如果机床振动或者某个轴的电机发出嗡嗡的叫声,调节该轴对应驱动器的的【Pr0.03】实时自动调整机械刚性选择,把刚性数值一个一个的降低,直到不振动或者嗡嗡的叫为止,然后再进行自动增益调整。 以上参数只适合上海维宏控制系统
伺服参数初始化操作
第三讲伺服参数的初始化 FANUC0i-MateD系列画面说明 功能键: :按此键显示位置显示画面。:按此键显示偏置/设定画面。 :按此键显示程序画面。:按此键显示系统画面。 :按此键显示信息画面。:按此键显示图形画面。 1、伺服参数的作用 实现数控系统与机床结构和机床各种功能的匹配,使数控机床的性能达到最佳。 2、伺服参数初始化设定的页面介绍P105 (1)在MDI方式下,按下【OFS/SET】,再单击【设定】,选择设定页面,确认“写参数=1”,如图4-1所示。 图4-1 设定画面图4-2 修改参数 (2)设置参数#3111.0=1(设1后应关机,再开机)允许显示伺服参数初始化设定页面和伺服参数调整页面。 (3)显示伺服参数初始化设定页面的步骤: 1)按功能键【SYSTEM】和软键【+】,出现如图4-4所示画面。
图4-3 系统功能键图4-4 参数界面2)按软键【SV设定】出现如图4-5所示伺服设定画面。 3)伺服参数初始化设定页面与参数的对应关系如图4-6所示。 (4)伺服参数的主要内容 FANUC数控系统的伺服参数是很丰富的,具体伺服电机参数可以参考伺服电机参数手册,现在仅介绍参数初始化和微小调整使用的一些参数。 图4-5 a) 伺服设定画面图4-5 b) 伺服设定画面 图4-5 c) 伺服设定画面图4-5 d) 伺服设定画面
1)初始化设定位 NO 2000 #0(PLC01):设定为“0”时,检测单位为1μm,FANUC系统使用参数2023(速度脉冲数)、2024(位置脉冲数)。设定为“1”时,检测单位为0.1μm,把上面系统参数的数值乘10倍。#1(DGPRM):设定为“0”时,系统进行数字伺服参数初始化设定,当伺服参数初始化后,该位自动变成“1”。 #3(PRMCAL):进行伺服初始化设定时,该位自动变成“1”(FANUC—OC/OD系统无此功能)。根据编码器的脉冲数自动计算下列参数:PRM2043、PRM2044、PRM2047、PRM2053、PRM2054、PRM2056、PRM2057、PRM2059、PRM2074、PRM2076。 2)伺服电机代号 根据所使用的伺服电动机的类型及规格,查出ID代码。 电机型号:βiS8/3000(电机型号:βiS8,最高转速为3000r/min); 电机订货号:A06B-0075-B103(B103表示电机为法兰安装,不带抱闸)。 表FANUC系统αis、βis系列伺服电动机的ID代码
A5伺服参数设置
松下A5系列伺服参数 一、松下MINAS A5系列伺服驱动器参数设定: 用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。但是, 二、松下驱动器的调节 松下伺服器修改参数设定值后,须选择EEPROM 写入模式。 方法如下: ①按 MODE键,选择EEPROM写入显示模式EE_SEt; ②按 SET键,显示EEP -;
③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。 三、电子齿轮比的计算(针对松下A5驱动),有两种计算方式: 1、松下专有方式:Pr0.08* 电机每旋转一次的指令脉冲数=螺距/脉冲当量 2、通用计算方式:当Pr0.08参数为0时,电子齿轮比=分子/分母=Pr0.09/Pr0.10=编码器分辨率*脉冲当量*机械减速比/螺距(=10000*0.001*1/5=2/1) 四、惯量比的调节 Pr0.04惯量比 该参数对机床运行的平稳性、加工效果等起到了很重要的作用,比如:机床振动、机床电机发出异常声音、加工出来的圆不圆、加工的工件粗糙、加工的工件变形等,只有设置合理的惯量比,机床才能发挥出最大的优势,才能加工出更好的工件。 惯量比的设定有两种方法: 其一、手动设定直接手动将估算的惯量比设置到【Pr0.04】里。如果手动设置,需要你估算该机床的惯量比,既然估算,很难达到理想的惯量比,机床就很难发挥出最大的优势。 其二、自动设定机床运动。只有适合机床的惯量比,加工出来的工件才是最好的下面我将详细介绍惯量比的自动调节: 1) 调节【Pr0.02】实时自动增益调整模式设定 【Pr0.02】 X轴、Y轴设为【1】 【Pr0.02】 Z轴设为【3】 2) 调节【Pr0.03】实时自动调整机械刚性选择 该参数非常重要,决定了机床的平稳性以及加工效果。一般设定值在0~31之间。X轴Y 轴Z轴可根据机床本身任意设,在机床运动时机床不振动、电机不发出嗡嗡声音的前提下,尽量增大参数的值,因为该参数决定机床的刚性,机床的刚性越大,加工出来的工件越理想,加工效果越好 3) 装载一个三轴加工文件,最好连动的,可以不放工件进行空跑,也可以放工 件。大约十分钟左右便可以停下来,此时,你去看【Pr0.04】,已经有了变化,此时不管数值是多少,不要去改动。因为是自动惯量比,请抛开你以前认为的数值。如果其中某一个轴为0,重新操作。 4) 重新调节【Pr0.02】实时自动增益调整模式设定 【Pr0.02】 X轴、Y轴设为【0】 【Pr0.02】 Z轴设为【0】 即将实时自动增益调整设置无效 5) 调节【Pr1.15】第一控制切换模式 将【Pr1.15】设为【0】,让第一增益值固定 6) 调节【Pr1.00】第 1位置环增益和【Pr1.01】第 1速度环增益 在实时自动增益时,【Pr1.00】第 1 位置环增益和【Pr1.01】第 1 速度环增益便会随着机械刚性的选择进行变化。在机床运动时机床不振动、电机不发出嗡嗡声音的前提下,尽量增大两个参数的值,这样响应越快,加工出来的工件越理想,加工效果越好。
富士伺服驱动器参数设定基本操作。(方案
4.2.1 第一阶段 连接伺服放大器及伺服电机,进行试运行。配线方法参照3 章。 在伺服电机的输出轴未连接到机械系统的状态下进行试运行。 在第一阶段确认以下项目。 <确认> ?确认伺服放大器的电源配线(L1、L2、L3) ?确认伺服电机动力线(U、V、W)、编码器电缆线 ?确认伺服放大器、伺服电机是否正常工作 ?确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序 (1) 请固定伺服电机,以防其横向翻倒。 将伺服电机牢固固定 不要在电机的输出轴上安装任何东西 (2) 请按3 章的配线,为伺服放大器与伺服电机配线。 ※第一阶段进行单体试运行,故不要连接到CN1 上。 (3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。 i) 请确认充电用显示灯。 ii) 请确认触摸面板显示。 ※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。 5 参数 5.1 参数构成 伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。 由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。 作为参数一览表的"变更" 项目的"电源" 的参数,即使切断主电源,再接通电源时仍然有效。(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。) 5.1.1 利用触摸面板编集的方法 5-2
5.2 参数一览表
5.3 参数说明 以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。 输出脉冲数和命令脉冲补偿无关。根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
交流伺服系统主要参数与设定方法
交流伺服系统主要参数与设定方法 大部分交流伺服系统位置环均采用比例调节器,因为积分调节虽然可以减小系统的静差,但是会产生位置超调,在需要高跟随性能的系统中,可以增加位置前馈增益参数。速度环和电流环采用比例积分调节器。下面对影响数控机床性能的交流伺服主要参数及意义说明如下: 速度比例增益参数 主要是设定速度环调节器的比例增益,增益越高,刚度越大,参数数值 根据具体的伺服驱动系统型号和负载情况确定,一般情况下,负载惯量越大,设定值越大。 速度积分频率参数(速度积分频率为速度积分时间的倒数) 主要是设定 速度环调节器的积分频率,积分频率越大,刚度越大,参数数值根据具 体的伺服驱动系统型号和负载情况确定,一般情况下,负载惯量越大, 设定值越小。 速度检测低通滤波器参数,主要是设定速度检测低通滤波器特性,数值越小,截止频率越低,电机产生的噪音越小,如果负载惯量很大,可以适
当减小设定值。数值太小,造成响应变慢,可能会引起振荡。 位置比例增益参数,主要是设定位置环调节器的比例增益,设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小,但数值太大可能会引起振荡或超调。 电流积分频率参数,主要是设定电流环调节器的积分频率,积分频率越大,积分速度越快,电流跟踪误差越小,但积分时间太大,会产生噪声或振荡,该参数仅与伺服驱动器和电机有关,与负载无关,一般情况下,电机的电磁时间常数越大,积分频率越小,在系统不产生振荡的条件下,该参数尽量设定的较大。 电流比例增益参数,主要是设定电流环调节器的比例增益,增益越高,电流跟踪误差越小,但增益太高,会产生噪声或振荡,该参数仅于伺服驱动器和电机有关,与负载无关,在系统不产生振荡的条件下,该参数尽量设定的较大。 电流或转矩指令低通滤波器截止频率参数,该参数主要是设定电流或转矩指令低通滤波器截止频率,用来限制电流或转矩指令频带,避免电流或转矩冲击和振荡,使电流、转矩响应平稳。 调节改变交流伺服参数,伺服系统的特性发生改变,比例环节参数的作
a伺服参数设置
松下 A5系列伺服参数 一、松下MINAS A5系列伺服驱动器参数设定: 用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
二、松下驱动器的调节 松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下: ①按 MODE键,选择EEPROM写入显示模式EE_SEt; ②按 SET键,显示EEP -; ③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。 三、电子齿轮比的计算(针对松下A5驱动),有两种计算方式: 1、松下专有方式:* 电机每旋转一次的指令脉冲数=螺距/脉冲当量 2、通用计算方式:当参数为0时,电子齿轮比=分子/分母==编码器分辨率*脉冲当量*机械减速比/螺距(=10000**1/5=2/1) 四、惯量比的调节惯量比 该参数对机床运行的平稳性、加工效果等起到了很重要的作用,比如:机床振动、机床电机发出异常声音、加工出来的圆不圆、加工的工件粗糙、加工的工件变形等,只有设置合理的惯量比,机床才能发挥出最大的优势,才能加工出更好的工件。 惯量比的设定有两种方法: 其一、手动设定直接手动将估算的惯量比设置到【】里。如果手动设置,需要你估算该机床的惯量比,既然估算,很难达到理想的惯量比,机床就很难发挥出最大的优势。 其二、自动设定机床运动。只有适合机床的惯量比,加工出来的工件才是最好的
下面我将详细介绍惯量比的自动调节: 1) 调节【】实时自动增益调整模式设定 【】 X轴、Y轴设为【1】 【】 Z轴设为【3】 2) 调节【】实时自动调整机械刚性选择 该参数非常重要,决定了机床的平稳性以及加工效果。一般设定值在0~31之间。X轴Y 轴Z轴可根据机床本身任意设,在机床运动时机床不振动、电机不发出嗡嗡声音的前提下,尽量增大参数的值,因为该参数决定机床的刚性,机床的刚性越大,加工出来的工件越理想,加工效果越好 3) 装载一个三轴加工文件,最好连动的,可以不放工件进行空跑,也可以放工件。大约十 分钟左右便可以停下来,此时,你去看【】,已经有了变化,此时不管数值是多少,不要去改动。因为是自动惯量比,请抛开你以前认为的数值。如果其中某一个轴为0,重新操作。 4) 重新调节【】实时自动增益调整模式设定 【】 X轴、Y轴设为【0】 【】 Z轴设为【0】 即将实时自动增益调整设置无效 5) 调节【】第一控制切换模式
伺服驱动器重要参数的设置方法和技巧
伺服驱动器重要参数的设置方法和技巧 随着市场的发展和国内功率电子技术、微电子技术、计算机技术及控制原理等技术的进步,国内数控系统、交流伺服驱动器及伺服电动机这两年有了较大的 发展,在某些应用领域打破了国外的垄断局面。笔者因多年从事数控技术工作,使用了多套日本安川、松下、三洋等数字伺服,但最近因国产伺服性价比好,使 用了一些数控技术公司生产的交流伺服驱动及电动机,对使用中某些方面总结了一些简单实用的技巧。 1KNDSD100基本性能 1.1基本功能 SD100采用国际上先进的数字信号处理器(DSP)TM320(S240)、大规模可编程门阵列(FPGA)、日本三菱的新一代智能化功率模块(1PM),集成度高,体积小,具有超速、过流、过载、主电源过压欠压、编码器异常和位置超差等保护功能。 与步进电动机相比,交流伺服电动机无失步现象。伺服电动机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。调速比宽1:5000,转矩恒定,1 r和2000r的扭矩基本一样,从低速到高速都具有稳定的转矩特性和很快的响应特性。采用全数字控制,控制简单灵活。用户通过参数修改可以对伺服的工作方式、运行特性作出适当的设置。目前价格仅比步进电动机高2000~3000元。 1.2参数调整 SD100为用户提供了丰富的用户参数0~59个,报警参数1~32个,监视方式(电动机转速,位置偏差等)22个。用户可以根据不同的现场情况调整参数,以达到最佳控制效果。几种常用的参数的含义是: (1)“0”号为密码参数,出厂值315,用户改变型号必须将此密码改为
385。" (2)“1”号为型号代码,对应同系列不同功率级别的驱动器和电动机。 (3)“4”号为控制方式选择,改变此参数可设置驱动器的控制方式。其中,“0”为位置控制方式;“1”为速度控制方式;“2”为试运行控制方式;“3”为JOG控制方式;“4”为编码器调零方式;“5”为开环控制方式(用户测试电压及编码器);“6”为转矩控制方式。 (4)“5”号为速度比例增益,出厂值为 150。"此设置值越大,增益越高,刚度越高。参数设置根据具体的伺服驱动型号和负载情况设定。一般情况下,负载惯量越大,设定值越大。在系统不产生振荡情况下,应尽量设定较大些。 (5)“6”号为速度积分时间常数,出厂值为 20。"此设定值越小,积分速度越快,太小轻易产生超调,太大使响应变慢。参数设置根据具体的伺服驱动型号和负载确定。一般情况下,负载惯量越大,设定值越大。 (6)“40”、“4l”号为加减速时间常数,出厂设定为 0。"此设定值表示电动机以0~100r/min转速所需的加速时间或减速时间。加减速特性呈线性。 (7)“9”号为位置比例增益,出厂没定为 40。"此设置值越大,增益越高,刚度越高,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调。参数数值根据具体的伺服驱动型号和负载情况而定。 2 KNDSD100的参数设置技巧 SD100伺服驱动器和凯恩帝数控系统相配时,只需设定表1中的参数,其余参数,一般情况下,不用修改。电子齿轮比的设置如下: