实用电路——半双工UART通信
实用电路——半双工UART通信
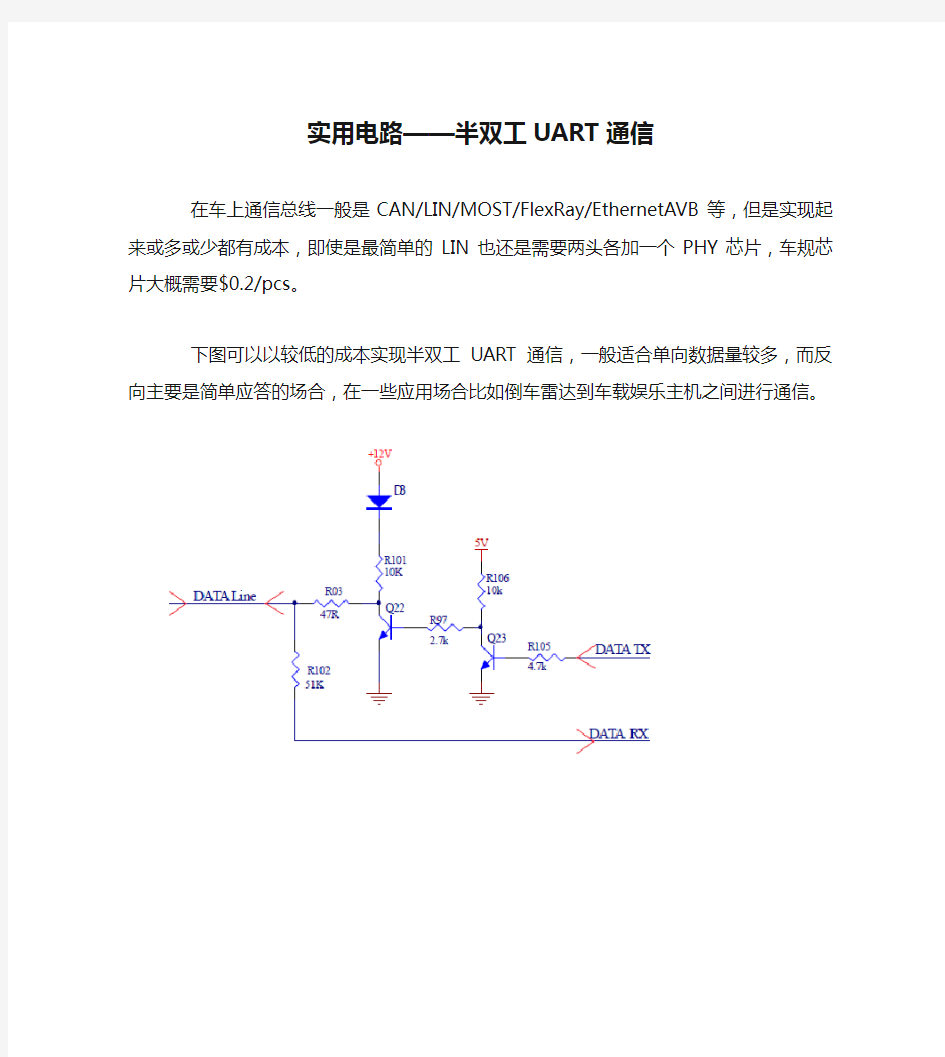
在车上通信总线一般是CAN/LIN/MOST/FlexRay/EthernetAVB等,但是实现起来或多或少都有成本,即使是最简单的LIN也还是需要两头各加一个PHY芯片,车规芯片大概需要$0.2/pcs。
下图可以以较低的成本实现半双工UART通信,一般适合单向数据量较多,而反向主要是简单应答的场合,在一些应用场合比如倒车雷达到车载娱乐主机之间进行通信。
cc2530串口UART0通信实验(20200627130016)
/********************* 头文件*************************************************/ #include 全双工与半双工知识 半双工定义 半双工(Half Duplex)数据传输指数据可以在一个信号载体的两个方向上传输,但是不能同时传输。例如,在一个局域网上使用具有半双工传输的技术,一个工作站可以在线上发送数据,然后立即在线上接收数据,这些数据来自数据刚刚传输的方向。像全双工传输一样,半双工包含一个双向线路(线路可以在两个方向上传递数据)。 数据通信中,数据在线路上的传送方式可以分为单工通信、半双工通信和全双工通信三种。 半双工通信:半双工通信是指数据可以沿两个方向传送,但同一时刻一个信道只允许单方向传送,因此又被称为双向交替通信。若要改变传输方向,需由开关进行切换。半双工方式要求收发两端都有发送装置和接收装置。由于这种方式要频繁变换信道方向,故效率低,但可以节约传输线路。半双工方式适用于终端与终端之间的会话式通信。 半双工即Half duplex Communication,是指在通信过程的任意时刻,信息既可由A传到B,又能由B传A,但只能由一个方向上的传输存在。采用半双工方式时,通信系统每一端的发送器和接收器,通过收/发开关转接到通信线上,进行方向的切换,因此,会产生时间延迟。收/发开关实际上是由软件控制的电子开关。 当计算机主机用串行接口连接显示终端时,在半双工方式中,输入过程和输出过程使用同一通路。有些计算机和显示终端之间采用半双工方式工作,这时,从键盘打入的字符在发送到主机的同时就被送到终端上显示出来,而不是用回送的办法,所以避免了接收过程和发送过程同时进行的情况。 编辑本段半双工解析 半双工传输是指接收与发送共用一个载波信道,但同一时刻只能发送或只能接收数据的传输方式。例如,局域网中的半双工数据传输方式是指:一个工作站发送数据,然后立即在同一信道上接收来自相同方向上的数据。另一方面,全双工传输(Full Duplex Transmission)指同时发生在两个方向上的一种数据传输方式。 例如:无线电话机就是一种半双工设备,在同一时间内只允许一方讲话。相反,电话机则是一种全双工设备,其通话双方可以同时进行对话。当某局域网中的两台计算机在实现通信时,同一时刻只能在同一方向上传送数据,这是因为大多数局域网中使用的基带网络都只支持单个信号。换句话说,基带网络采用的是半双工工作模式。 只要有合适的设备支持,在某些特定类型的局域网中实现全双工通信是完全可能的。关键是首先解决每个方向上的通信流量信道问题。该问题能否解决主要取决于所使用的网络媒体。如:同轴电缆是由中心导体、绝缘材料层、网状织物构成的屏蔽层以及外部隔离材料层组成,所以其不具备在两个方向上同时运行通信流量的物理方式,除非每次连接时另安装两根电缆这样也可支持运行。另一方面,双绞线电缆由两根具有绝缘保护层的铜导线组成,所以在理论上,使用双绞线电缆作为媒体的网络能 2.5 UART串口通信设计实例(1) 接下来用刚才采用的方法设计一个典型实例。在一般的嵌入式开发和FPGA设计中,串口UART是使用非常频繁的一种调试手段。下面我们将使用Verilog RTL编程设计一个串口收发模块。这个实例虽然简单,但是在后续的调试开发中,串口使用的次数比较多,这里阐明它的设计方案,不仅仅是为了讲解RTL编程,而且为了后续使用兼容ARM9内核实现嵌入式开发。 串口在一般的台式机上都会有。随着笔记本电脑的使用,一般会采用USB转串口的方案虚拟一个串口供笔记本使用。图2-7为UART串口的结构图。串口具有9个引脚,但是真正连接入FPGA开发板的一般只有两个引脚。这两个引脚是:发送引脚TxD和接收引脚RxD。由于是串行发送数据,因此如果开发板发送数据的话,则要通过TxD线1 bit接着1 bit 发送。在接收时,同样通过RxD引脚1 bit接着1 bit接收。 再看看串口发送/接收的数据格式(见图2-8)。在TxD或RxD这样的单线上,是从一个周期的低电平开始,以一个周期的高电平结束的。它中间包含8个周期的数据位和一个周期针对8位数据的奇偶校验位。每次传送一字节数据,它包含的8位是由低位开始传送,最后一位传送的是第7位。 这个设计有两个目的:一是从串口中接收数据,发送到输出端口。接收的时候是串行的,也就是一个接一个的;但是发送到输出端口时,我们希望是8位放在一起,成为并行状态(见图2-10)。我们知道,串口中出现信号,是没有先兆的。如果出现了串行数据,则如何通知到输出端口呢?我们引入“接收有效”端口。“接收有效”端口在一般情况下都是低电平,一旦有数据到来时,它就变成高电平。下一个模块在得知“接收有效”信号为高电平时,它就明白:新到了一个字节的数据,放在“接收字节”端口里面。 1、单工 单工就是指A只能发信号,而B只能接收信号,通信是单向的,就象灯塔之于航船——灯塔发出光信号而航船只能接收信号以确保自己行驶在正确的航线上。 2、半双工 半双工就是指A能发信号给B,B也能发信号给A,但这两个过程不能同时进行。最典型的例子就象我们在影视作品中看到的对讲机一样: 007:呼叫总部,请求支援,OVER 总部:收到,增援人员将在5分钟内赶到,OVER 007:要5分钟这么久?!要快呀!OVER 总部:…… GAME OVER 在这里,每方说完一句话后都要说个OVER,然后切换到接收状态,同时也告之对方——你可以发言了。如果双方同时处于收状态,或同时处于发状态,便不能正常通信了。 3、全双工 全双工比半双工又进了一步。在A给B发信号的同时,B也可以给A发信号。典型的例子就是打电话。 A:我跟你说呀…… B:你先听我说,情况是这样的…… A和B在说的同时也能听到对方说的内容,这就是全双工。 对于全双工以太,IEEE制订了802.3x全双工/流控制标准,该标准对全双工方式下的流控制机制做了具体的规定。在各以太标准(10/100/1000 Base)中,除100 Base T4之外,均具有全双工能力,但在实际应用中,似乎只有Gb以太(即千兆以太)才使用全双工方式。 以太网的MAC协议是CSMA/CD,但在全双工以太中是不需要冲突检测(CD)的。这能使Gb以太突破40余米的段长限制(更准确地说是41.2m,这个数据可以根据IEEE定时规则的限制计算出来,这里就不详细介绍了)。在实际应用中如果需要网络中的某个站点能工作在全双工方式下,则必须在该站点安装支持全双工的网卡,并要求与全双工站点连接的HUB/路由器等连网设备配备有全双工端口。 这样看来,如果希望工作在全双工方式下,首先要有硬件的支持。 全双工以太的主要优势在于它能够在二个独立的信道上同时实现二个方向上的数据传输,借以提高链路的总带宽,所以它只适用于文件服务器一类的需要同时进行双向数据传输的站点。对于一般只进行单向数据传输的站点,全双工以太并无优势可言,所以全双工以太在应用上有很大的局限性。全双工以太主要用在交换机互连的场合,尤其是Gb以太交换机。Win2K中,网卡与双工相关的设置在本地连接 - 属性 - 配置 - 高级里有一项“Link Speed & Duplex”,其值一般都是“Auto Detect”。建议不做改动。 交换机上有Duplex灯,如果亮表示工作在双工方式。目前,绝大多数的交换机均能自动识别与支持双工方式,无需手工设置。 半双工 科技名词定义 中文名称:半双工 英文名称:half duplex 定义: 单工半双工全双工的含 义及区别 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】 1、单工 单工就是指A只能发信号,而B只能接收信号,通信是单向的,就象灯塔之于航船——灯塔发出光信号而航船只能接收信号以确保自己行驶在正确的航线上。 2、半双工 半双工就是指A能发信号给B,B也能发信号给A,但这两个过程不能同时进行。最典型的例子就象我们在影视作品中看到的对讲机一样: 007:呼叫总部,请求支援,OVER 总部:收到,增援人员将在5分钟内赶到,OVER 007:要5分钟这么久!要快呀!OVER 总部:…… GAME OVER 在这里,每方说完一句话后都要说个OVER,然后切换到接收状态,同时也告之对方——你可以发言了。如果双方同时处于收状态,或同时处于发状态,便不能正常通信了。3、全双工 全双工比半双工又进了一步。在A给B发信号的同时,B也可以给A发信号。典型的例子就是打电话。 A:我跟你说呀…… B:你先听我说,情况是这样的…… A和B在说的同时也能听到对方说的内容,这就是全双工。 对于全双工以太,IEEE制订了全双工/流控制标准,该标准对全双工方式下的流控制机制做了具体的规定。在各以太标准(10/100/1000 Base)中,除100 Base T4之外,均 具有全双工能力,但在实际应用中,似乎只有Gb以太(即千兆以太)才使用全双工方式。 以太网的MAC协议是CSMA/CD,但在全双工以太中是不需要冲突检测(CD)的。这能使Gb以太突破40余米的段长限制(更准确地说是41.2m,这个数据可以根据IEEE定时规则的限制计算出来,这里就不详细介绍了)。在实际应用中如果需要网络中的某个站点能工作在全双工方式下,则必须在该站点安装支持全双工的网卡,并要求与全双工站点连接的HUB/路由器等连网设备配备有全双工端口。 这样看来,如果希望工作在全双工方式下,首先要有硬件的支持。 全双工以太的主要优势在于它能够在二个独立的信道上同时实现二个方向上的数据传输,借以提高链路的总带宽,所以它只适用于文件服务器一类的需要同时进行双向数据传输的站点。对于一般只进行单向数据传输的站点,全双工以太并无优势可言,所以全双工以太在应用上有很大的局限性。全双工以太主要用在交换机互连的场合,尤其是Gb 以太交换机。 Win2K中,网卡与双工相关的设置在本地连接 - 属性 - 配置 - 高级里有一项“Link Speed & Duplex”,其值一般都是“Auto Detect”。建议不做改动。 交换机上有Duplex灯,如果亮表示工作在双工方式。目前,绝大多数的交换机均能自 动识别与支持双工方式,无需手工设置。 半双工 科技名词定义 中文名称: 单工,半双工,全双工的 含义及区别 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】 1、单工单工就是指A只能发信号,而B只能接收信号,通信是单向的,就象灯塔之于航船——灯塔发出光信号而航船只能接收信号以确保自己行驶在正确的航线上。 2、半双工半双工就是指A能发信号给B,B也能发信号给A,但这两个过程不能同时进行。最典型的例子就象我们在影视作品中看到的对讲机一样:007:呼叫总部,请求支援,O V E R 总部:收到,增援人员将在5分钟内赶到,O V E R 007:要5分钟这么久!要快呀!O V E R 总部:…… G A M E O V E R 在这里,每方说完一句话后都要说个OVER,然后切换到接收状态,同时也告之对方——你可以发言了。如果双方同时处于收状态,或同时处于发状态,便不能正常通信了。3、全双工全双工比半双工又进了一步。在A给B发信号的同时,B也可以给A发信号。典型的例子就是打电话。 A:我跟你说呀…… B:你先听我说,情况是这样的…… A和B在说的同时也能听到对方说的内容,这就是全双工。对于全双工以太,IEEE制订了全双工/流控制标准,该标准对全双工方式下的流控制机制做了具体的规定。在各以太标准(10/100/1000 Base)中,除100 Base T4之外,均具有全双工能力,但在实际应用中,似乎只有Gb以太(即千兆以太)才使用全双工方式。 以太网的MAC协议是CSMA/CD,但在全双工以太中是不需要冲突检测(CD)的。这能使Gb以太突破40余米的段长限制(更准确地说是41.2m,这个数据可以根据IEEE定时规则的限制计算出来,这里就不详细介绍了)。在实际应用中如果需要网络中的某个站点能工作在全双工方式下,则必须在该站点安装支持全双工的网卡,并要求与全双工站点连接的HUB/路由器等连网设备配备有全双工端口。这样看来,如果希望工作在全双工方式下,首先要有硬件的支持。全双工以太的主要优势在于它能够在二个独立的信道上同时实现二个方向上的数据传输,借以提高链路的总带宽,所以它只适用于文件服务器一类的需要同时进行双向数据传输的站点。对于一般只进行单向数据传输的站点,全双工以太并无优势可言,所以全双工以太在应用上有很大的局限性。全双工以太主要用在交换机互连的场合,尤其是G b以太交换机。 实验八、UART串口通信实验 一、实验目的 1. 了解RS232通信接口的基本原理; 2. 熟悉通信接口芯片(TL16C550C)在DSP I/O空间寄存器的地址映射 及工作原理; 3.了解异步通信中串口模式选择、设置数据传输格式、设置波特率、建立连接、传输数据和断开连接等功能。 二、实验设备 1. 集成开发环境CCS 2. 实验开发板TMS320VC5402DSK、RS232接口电缆线及附件 3.程序“串口调试程序v2.2.exe” 三、实验内容及步骤 实验操作流程参照前面实验。 1 在汇编环境调试Uart:(实现字符或文件的发送和回发功能) a. 实验代码main.s54、uartasm.cmd和uart_init.s54、dsp_init.s54 以及uartasm.h54,c5402_dsk.gel(说明同前)。 b. 串口调试程序“串口调试程序v2.2.exe” , 汇编调试中Build option设置情况与CODEC实验中的汇编调试设置及出错情况相同。 c. 程序文件介绍: 1)“uart.h54”定义了一些寄存器的地址以及函数类型。 2)“dsp_init.s54”与dsp工作有关的寄存器ST1、PMST、IMR、IFR和SWWSR,并且清除INTM位以及设定时钟模式。 3)“uart_init.s54”先检测UART模块是否工作正常,然后设定UART模块的寄存器,如CNTL1、CNTL2、LCR、MSB&LSB(设定波特率)、FCR、IER 等。 4)“main.s54”主程序查看标志位,检测是否UART存在有效接收数据。若有,则执行一定的处理,包括亮LED以及将接收的数据从UART回发。 d. 执行程序时,只要发送数据时,可在串口调试程序的接收窗口立即看到回发的数据。 e. 程序中UART工作参数设置如下: 1)波特率9600(或更低)、无数据校验、字符长度8比特、停止位1、 UART异步串行口 UART异步串行口简介 数据通信的基本方式可分为并行通信与串行通信两种: 并行通信:是指利用多条数据传输线将一个资料的各位同时传送。它的特点是传输速度快,适用于短距离通信,但要求通讯速率较高的应用场合。 串行通信:是指利用一条传输线将资料一位位地顺序传送。特点是通信线路简单,利用简单的线缆就可实现通信,降低成本,适用于远距离通信,但传输速度慢的应用场合。 UART 异步串行口的传输格式 异步通信以一个字符为传输单位,通信中两个字符间的时间间隔是不固定的,然 而在同一个字符中的两个相邻位代码间的时间间隔是固定的。 通信协议(通信规程):是指通信双方约定的一些规则。在使用异步串口传送一个 字符的信息时,对资料格式有如下约定:规定有空闲位、起始位、资料位、奇偶校验位、停止位。通讯时序图如下: 开始前,线路处于空闲状态,送出连续“1”。传送开始时首先发一个“0”作为 起始位,然后出现在通信线上的是字符的二进制编码数据。 每个字符的数据位长可以约定为5 位、6 位、7 位或8 位,一般采用ASCII 编码。后面是奇偶校验位,根据约定,用奇偶校验位将所传字符中为“1”的位数凑成奇 数个或偶数个。也可以约定不要奇偶校验,这样就取消奇偶校验位。 最后是表示停止位的“1”信号,这个停止位可以约定持续1 位、1.5 位或2 位 的时间宽度。 至此一个字符传送完毕,线路又进入空闲,持续为“1”。经过一段随机的时间后,下一个字符开始传送才又发出起始位。 每一个数据位的宽度等于传送波特率的倒数。微机异步串行通信中,常用的波特 率为110,150,300,600,1200,2400,4800,9600 ,19200,38400,115200等。 S3C2410的异步串行口 1 网络的全双工与半双工 平时我们经常会说:“这个网络是10Mbps的,那个网络是100Mbps的”。但如果我问你:“这10Mbps、100Mbps是指的全双工呢?还是半双工呢?”也许你就回答不上来了。是的,关于网络的“双工”问题,真正弄清楚的人并不多,很多从事组网或网络管理工作多年的技术人员,也无法说清楚“全双工”和“半双工”的具体含义和差别。难道这很深奥吗?不!只是我们平时没有在意这个问题罢了。现在,我们就来谈谈网络的“全双工”和“半双工”。 一、什么是“全双工”、“半双工”所谓“双工”,是“双向工作”的意思。与电视和广播的单向工作不同,计算机网络有数据发送,也有数据接收,所以必然是双向的,因此也就是双工的。关于声卡的全双工和半双工,想必大家都清楚,声卡的录音(声音进入)和播放(声音输出)能同时进行就是全双工声卡,不能就是半双工声卡。网络的全双工和半双工也是同样的道理。如果在发送数据的同时也能够接收数据,那么网络就是“全双工网络”;如果发送和接收数据在同一时刻只能进行其一,那么网络就是“半双工网络”。 二、双工网络带宽如何计算那么,我们平时所说的“10Mbps、100Mbps”是指全双工带宽呢?还是半双工带宽呢?我这样回答你:我们所说的十兆以太网、百兆以太网、千兆以太网,甚至新近出现的万兆以太网,都是指在一个回路上的网络带宽,即单向带宽。 现在的双绞线网络使用两对线分别用于数据的发送和接收,也就是说具有两个回路。既然双绞线有两个回路,那么是不是说100Mbps双绞线网络的实际带宽就是200Mbps呢?实际上并非绝对如此,这要看这两个回路是否处于“全双工”工作状态,即发送线对和接收线对同时在工作。 在全双工双绞线网络中,接收线对和发送线对同时在工作,每一线对的带宽都是100Mbps,这样在双绞线网络中,实际传送的带宽是200Mbps。就像双向车道一样,车辆流量的计算应是两个方向的车辆流量之和,网络带宽的计算也是如此。 在半双工双绞线网络中,在某一时刻,如果发送线对处于发送状态,则接收线对只能处于闲置状态,即使在物理线路上允许接收也不行,因为是不是全双工状态取决于与双绞线连接的网络设备是否支持全双工,而双绞线只是提供了物理介质而已。打个浅显的比方,高速公路都是双向(即双工)的,但是如果高速公路两端的收费站都只有一个车道,同一时刻只能有一辆车驶入或驶出,那么双向车道又有什么用呢?所以,100Mbps的半双工网络的带宽是 简单描述: SPI 和I2C这两种通信方式都是短距离的,芯片和芯片之间或者其他元器件如传感器和芯片之间的通信。SPI和IIC是板上通信,IIC有时也会做板间通信,不过距离甚短,不过超过一米,例如一些触摸屏,手机液晶屏那些很薄膜排线很多用IIC,I2C能用于替代标准的并行总线,能连接的各种集成电路和功能模块。I2C 是多主控总线,所以任何一个设备都能像主控器一样工作,并控制总线。总线上每一个设备都有一个独一无二的地址,根据设备它们自己的能力,它们可以作为发射器或接收器工作。多路微控制器能在同一个I2C总线上共存这两种线属于低速传输; 而UART是应用于两个设备之间的通信,如用单片机做好的设备和计算机的通信。这样的通信可以做长距离的。UART和,UART就是我们指的串口,速度比上面三者快,最高达100K左右,用与计算机与设备或者计算机和计算之间通信,但有效范围不会很长,约10米左右,UART优点是支持面广,程序设计结构很简单,随着USB的发展,UART也逐渐走向下坡; SmBus有点类似于USB设备跟计算机那样的短距离通信。 简单的狭义的说SPI和I2C是做在电路板上的。而UART和SMBUS是在机器外面连接两个机器的。 详细描述: 1、UART(TX,RX)就是两线,一根发送一根接收,可以全双工通信,线数也比较少。数据是异步传输的,对双方的时序要求比较严格,通信速度也不是很快。在多机通信上面用的最多。 2、SPI(CLK,I/O,O,CS)接口和上面UART相比,多了一条同步时钟线,上面UART 的缺点也就是它的优点了,对通信双方的时序要求不严格不同设备之间可以很容易结合,而且通信速度非常快。一般用在产品内部元件之间的高速数据通信上面,如大容量存储器等。 3、I2C(SCL,SDA)接口也是两线接口,它是两根线之间通过复杂的逻辑关系传输数据的,通信速度不高,程序写起来也比较复杂。一般单片机系统里主要用来和24C02等小容易存储器连接。 SPI:高速同步串行口。3~4线接口,收发独立、可同步进行 UART:通用异步串行口。按照标准波特率完成双向通讯,速度慢 SPI:一种串行传输方式,三线制,网上可找到其通信协议和用法的 3根线实现数据双向传输 串行外围接口 Serial peripheral interface UART:通用异步收发器 UART是用于控制计算机与串行设备的芯片。有一点要注意的是,它提供了 串行通讯简单认识单工、半双工和全双工的定义 串行通讯简单认识 串行通讯的基本概念:与外界的信息交换称为通讯。基本的通讯方式有并行通讯和串行通讯两种。 一条信息的各位数据被同时传送的通讯方式称为并行通讯。并行通讯的特点是:各数据位同时传送,传送速度快、效率高,但有多少数据位就需多少根数据线,因此传送成本高,且只适用于近距离(相距数 米)的通讯。 一条信息的各位数据被逐位按顺序传送的通讯方式称为串行通讯。串行通讯的特点是:数据位传送,传按位顺序进行,最少只需一根传输线即可完成,成本低但送速度慢。串行通讯的距离可以从几米到几千 米。 根据信息的传送方向,串行通讯可以进一步分为单工、半双工和全双工三种。信息只能单向传送为单工;信息能双向传送但不能同时双向传送称为半双工;信息能够同时双向传送则称为全双工。 串行通讯又分为异步通讯和同步通讯两种方式。在单片机中,主要使用异步通讯方式。 MCS_51单片机有一个全双工串行口。全双工的串行通讯只需要一根输出线和一根输入线。数据的输出又称发送数据(TXD),数据的输入又称接收数据(RXD)。串行通讯中主要有两个技术问题,一个是数据传送、另一个是数据转换。数据传送主要解决传送中的标准、格式及工作方式等问题。数据转换是指数据的串并行转换。具体说,在发送端,要把并行数据转换为串行数据;而在接收端,却要把接收到的串行 数据转换为并行数据。 单工、半双工和全双工的定义 如果在通信过程的任意时刻,信息只能由一方A传到另一方B,则称为单工。 如果在任意时刻,信息既可由A传到B,又能由B传A,但只能由一个方向上的传输存在,称为半双工传输。 如果在任意时刻,线路上存在A到B和B到A的双向信号传输,则称为全双工。 电话线就是二线全双工信道。由于采用了回波抵消技术,双向的传输信号不致混淆不清。双工信道有时也将收、发信道分开,采用分离的线路或频带传输相反方向的信号,如回线传输。 实验四 UART 串口通信 学院:研究生院 学号:1400030034 姓名:张秋明 一、 实验目的及要求 设计一个UART 串口通信协议,实现“串 <-->并”转换功能的电路,也就是 “通用异步收发器”。 二、 实验原理 UART 是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实 现全双工传输和接收。在嵌入式设计中,UART 用来主机与辅助设备通信,如汽 车音响与外接AP 之间的通信,与PC 机通信包括与监控调试器和其它器件,如 EEPROM 通信。 UART 作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一 位接一位地传输。 其中各位的意义如下: 起始位:先发出一个逻辑” 0的信号,表示传输字符的开始。 资料位:紧接着起始位之后。资料位的个数可以是 4、5、6、7、8等,构成 一个字符。通常采用ASCII 码。从最低位开始传送,靠时钟定位。 奇偶校验位:资料位加上这一位后,使得“ 1的位数应为偶数(偶校验)或奇数 (奇校验),以此来校验资料传送的正确性。 停止位:它是一个字符数据的结束标志。可以是 1位、1.5位、2位的高电 平。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能 在通信中两台设备间出现了小小的不同步。 因此停止位不仅仅是表示传输的结束, 并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步 的容忍程度越大,但是数据传输率同时也越慢。 空闲位:处于逻辑“ 1状态,表示当前线路上没有资料传送。 波特率:是衡量资料传送速率的指标。表示每秒钟传送的符号数(symbol )。 一个符号代表的信息量(比特数)与符号的阶数有关。例如资料传送速率为 120 字符/秒,传输使用256阶符号,每个符号代表8bit ,则波特率就是120baud,比 特率是120*8=960bit/s 。这两者的概念很容易搞错。 三、 实现程序 library ieee; use ieee.std 」o gic_1164.all; end uart; architecture behav of uart is en tity uart is port(clk : in std_logic; rst_n: in std 」o gic --系统时钟 --复位信号 rs232_rx: in std 」o gic rs232_tx: out std 」o gic --RS232接收数据信号; --RS232发送数据信号;); use ieee.std_logic_ un sig ned.all; 单工-半双工-全双工的含义及区别 1、单工 单工就是指A只能发信号,而B只能接收信号,通信是单向的,就象灯塔之于航船——灯塔发出光信号而航船只能接收信号以确保自己行驶在正确的航线上。 2、半双工 半双工就是指A能发信号给B,B也能发信号给A,但这两个过程不能同时进行。最典型的例子就象我们在影视作品中看到的对讲机一样: 007:呼叫总部,请求支援,OVER 总部:收到,增援人员将在5分钟内赶到,OVER 007:要5分钟这么久?!要快呀!OVER 总部:…… GAME OVER 在这里,每方说完一句话后都要说个OVER,然后切换到接收状态,同时也告之对方——你可以发言了。如果双方同时处于收状态,或同时处于发状态,便不能正常通信了。 3、全双工 全双工比半双工又进了一步。在A给B发信号的同时,B也可以给A发信号。典型的例子就是打电话。 A:我跟你说呀…… B:你先听我说,情况是这样的…… A和B在说的同时也能听到对方说的内容,这就是全双工。 对于全双工以太,IEEE制订了802.3x全双工/流控制标准,该标准对全双工方式下的流控制机制做了具体的规定。在各以太标准(10/100/1000 Base)中,除100 Base T4之外,均具有全双工能力,但在实际应用中,似乎只有Gb以太(即千兆以太)才使用全双工方式。 以太网的MAC协议是CSMA/CD,但在全双工以太中是不需要冲突检测(CD)的。这能使Gb以太突破40余米的段长限制(更准确地说是41.2m,这个数据可以根据IEEE定时规则的限制计算出来,这里就不详细介绍了)。在实际应用中如果需要网络中的某个站点能工作在全双工方式下,则必须在该站点安装支持 实验四UART串口通信 学院:研究生院学号:1400030034姓名:张秋明 一、实验目的及要求 设计一个UART串口通信协议,实现“串<-->并”转换功能的电路,也就是“通用异步收发器”。 二、实验原理 UART是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。在嵌入式设计中,UART用来主机与辅助设备通信,如汽车音响与外接AP之间的通信,与PC机通信包括与监控调试器和其它器件,如EEPROM通信。 UART作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。 其中各位的意义如下: 起始位:先发出一个逻辑”0”的信号,表示传输字符的开始。 资料位:紧接着起始位之后。资料位的个数可以是4、5、6、7、8等,构成一个字符。通常采用ASCII码。从最低位开始传送,靠时钟定位。 奇偶校验位:资料位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验资料传送的正确性。 停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。 空闲位:处于逻辑“1”状态,表示当前线路上没有资料传送。 波特率:是衡量资料传送速率的指标。表示每秒钟传送的符号数(symbol)。一个符号代表的信息量(比特数)与符号的阶数有关。例如资料传送速率为120字符/秒,传输使用256阶符号,每个符号代表8bit,则波特率就是120baud,比特率是120*8=960bit/s。这两者的概念很容易搞错。 三、实现程序 library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_arith.all; use ieee.std_logic_unsigned.all; entity uart is port(clk : in std_logic; --系统时钟 rst_n: in std_logic; --复位信号 rs232_rx: in std_logic; --RS232接收数据信号; rs232_tx: out std_logic --RS232发送数据信号;); end uart; architecture behav of uart is RS485数据全双工、半双工的定义与应用 在串行通信中,数据通常是在两个站(如终端和微机)之间进行传送,按照数据流的方向可分成三种基本的传送方式:全双工、半双工、和单工,但单工目前已很少采用。 1、全双工方式(full duplex) 当数据的发送和接收分流,分别由两根不同的传输线传送时,通信双方都能在同一时刻进行发送和接收操作,这样的传送方式就是全双工制,如图1所示。在全双工方式下,通信系统的每一端都设置了发送器和接收器,因此,能控制数据同时在两个方向上传送。全双工方式无需进行方向的切换,因此,没有切换操作所产生的时间延迟,这对那些不能有时间延误的交互式应用(例如远程监测和控制系统)十分有利。这种方式要求通讯双方均有发送器和接收器,同时,需要2根数据线传送数据信号,可能还需要控制线和状态线,以及地线。 图1 2、半双式方式(half duplex) 若使用同一根传输线既作接收又作发送,虽然数据可以在两个方向上传送,但通信双方不能同时收发数据,这样的传送方式就是半双工制,如图2所示。采用半双工方式时,通信系统每一端的发送器和接收器,通过收/发开关转接到通信线上,进行方向的切换,因此,会产生时间延迟。收/发开关实际上是由软件控制的电子开关。 图2 3.单工方式 如果在通信过程的任意时刻,信息只能由一方甲传到另一方乙,则称为单工。 图3 4.各种工作模式说的应用范围 1)全双工多用在要实现两端都可以控制云台上,其它的使用用途还在查找中….. 2)半双工多用在键盘矩阵的连接,语音对讲(来帮对讲系统)、硬盘录像机等。一般常见的设备之间的通讯都是使用的此模式。 3)单工多用在单向的云台控制。即我们常见的正向、反向控制数据等,我们光端机常规的都是这种工作方式。 在接受客户订单时,一定要区分数据的类型,特别是半双工和全双工,单工只需确认数据是正向和反向。 TD-SCDMA、WCDMA、CDMA2000三种方式的共性是多址方式用都用到CDMA,三者最主要的区别是双工方式不同,TD-SCDMA是时分双工TDD,WCDMA和CDMA2000 是频分双工FDD。 所以要入门,首先要搞懂什么是多址方式,什么是双工方式。 多址方式中的“址”就像给每个手机用户给一个“住址”,但这个住址不是按照门牌号区分的,而是按照时间T、频率F和扩频码字C共同区分的。多址方式中的“多”表示多个用户可以同时通话,比如办公室小格子里的小红和隔壁小格子里的小黑可以同时打电话,之所以不是轮流打,是因为通信网络给同时打电话的小红和小黑都分配了不同的“住址”,这样接收手机信号的基站就能通过“住址”这个标识把小红和小黑区分出来了,没有多址方式,小红和小黑的信号的混在一起了分不开了。 多址方式分为时分多址TDMA、频分多址FDMA和码分多址CDMA,D表示分,M表示多,A表示址。从效果上看三种方式等价,这个效果就是办公室格子间的同事们都同时打电话。时分多址TDMA就是大家的手机轮流给基站发送信号,但是轮流的非常非常快,每个手机发送的时间只占1秒的几十万分之一,再加上手机的一些信号处理,人耳感觉不到轮流中等待的那段时间,感觉就像连续通话一样。时分多址TDMA的“址”就是轮流分得的发送时间。频分多址FDMA就是大家的手机在不同的频率上给基站同时发送信号,各个频率就像不同的车道,互不干扰。频分多址FDMA的“址”就是分配给用户的不同车道。 码分多址CDMA就像大家发送信号前,给自己的信号上贴个大头贴,基站接收到大家一起发来的信号后,通过大头贴就能分辨出谁是小红、谁是小黑。这个大头贴就是扩频码字,扩频的意思的大大增加了传送的数据量,需要扩展车道,这是因为大家发送数据时给每个数据都额外传送这个大头贴,所以要用更宽的车道来传。码分多址CDMA的“址”就是标识用户的大头贴。 在实际中,并不一定仅由时间T、频率F或扩频码字C决定一个用户的“住址”,经常是几个因素一起决定,就像小红在指定车道上开着贴着自己大头贴的车,这就叫FDMA-CDMA, 串口通讯—全双工和半双工方式 在串行通信中,数据通常是在两个站(如终端和微机)之间进行传送,按照数据流的方向可分成三种基本的传送方式:全双工、半双工、和单工。但单工目前已很少采用,下面仅介绍前两种方式。 1、全双工方式(full duplex) 当数据的发送和接收分流,分别由两根不同的传输线传送时,通信双方都能在同一时刻进行发送和接收操作,这样的传送方式就是全双工制,如图1所示。在全双工方式下,通信系统的每一端都设置了发送器和接收器,因此,能控制数据同时在两个方向上传送。全双工方式无需进行方向的切换,因此,没有切换操作所产生的时间延迟,这对那些不能有时间延误的交互式应用(例如远程监测和控制系统)十分有利。这种方式要求通讯双方均有发送器和接收器,同时,需要2根数据线传送数据信号。(可能还需要控制线和状态线,以及地线)。 图1 比如,计算机主机用串行接口连接显示终端,而显示终端带有键盘。这样,一方面键盘上输入的字符送到主机内存;另一方面,主机 内存的信息可以送到屏幕显示。通常,往键盘上打入1个字符以后,先不显示,计算机主机收到字符后,立即回送到终端,然后终端再把这个字符显示出来。这样,前一个字符的回送过程和后一个字符的输入过程是同时进行的,即工作于全双工方式。 2、半双式方式(half duplex) 若使用同一根传输线既作接收又作发送,虽然数据可以在两个方向上传送,但通信双方不能同时收发数据,这样的传送方式就是半双工制,如图2所示。采用半双工方式时,通信系统每一端的发送器和接收器,通过收/发开关转接到通信线上,进行方向的切换,因此,会产生时间延迟。收/发开关实际上是由软件控制的电子开关。 图2 当计算机主机用串行接口连接显示终端时,在半双工方式中,输入过程和输出过程使用同一通路。有些计算机和显示终端之间采用半双工方式工作,这时,从键盘打入的字符在发送到主机的同时就被送到终端上显示出来,而不是用回送的办法,所以避免了接收过程和发送过程同时进行的情况。 实验四UART串口通信 一、实验目的及要求 设计一个UART串口通信协议,实现“串<-->并”转换功能的电路,也就是“通用异步收发器”。 二、实验原理 UART是一种通用串行数据总线,用于异步通信。该总线双向通信,可以实现全双工传输和接收。在嵌入式设计中,UART用来主机与辅助设备通信,如汽车音响与外接AP之间的通信,与PC机通信包括与监控调试器和其它器件,如EEPROM通信。 UART作为异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输。 其中各位的意义如下: 起始位:先发出一个逻辑”0”的信号,表示传输字符的开始。 资料位:紧接着起始位之后。资料位的个数可以是4、5、6、7、8等,构成一个字符。通常采用ASCII码。从最低位开始传送,靠时钟定位。 奇偶校验位:资料位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验资料传送的正确性。 停止位:它是一个字符数据的结束标志。可以是1位、1.5 位、2位的高电平。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。 空闲位:处于逻辑“1”状态,表示当前线路上没有资料传送。 波特率:是衡量资料传送速率的指标。表示每秒钟传送的符号数(symbol)。一个符号代表的信息量(比特数)与符号的阶数有关。例如资料传送速率为120字符/秒,传输使用256阶符号,每个符号代表8bit,则波特率就是120baud,比特率是120*8=960bit/s。这两者的概念很容易搞错。 三、实现程序 library ieee; use ieee.std_logic_1164.all; use ieee.std_logic_arith.all; use ieee.std_logic_unsigned.all; entity uart is port(clk : in std_logic; --系统时钟rst_n: in std_logic; --复位信号 rs232_rx: in std_logic; --RS232接收 实验七UART串口通信 一、实验目的 1.能够理解UART串口通信的基本原理和通信过程。 2.学会通过配置寄存器,实现串口通信的基本操作过程。 二、实验内容 通过对单片机编程来实现UART串口通信的基本过程,通过串口调试助手发送数据到单片机,并在数码管上显示出来。 三、实验参考原理 3.1 串行通信的初步认识 通信按照基本类型可以分为并行通信和串行通信。并行通信时数据的各个位同时传送,可以实现字节为单位通信,但是因为通信线多占用资源多,成本高。比如我们前边用到的 P0 = 0xfe;一次给P0的8个IO口分别赋值,同时进行信号输出,类似于有8个车道同时可以过去8辆车一样,这种形式就是并行的,我们习惯上还称P0、P1、P2和P3为51单片机的4组并行总线。 而串行通信,就如同一条车道,一次只能一辆车过去,如果一个0xfe这样一个字节的数据要传输过去的话,假如低位在前高位在后,那发送方式就是0-1-1-1-1-1-1-1-1,一位一位的发送出去的,要发送8次才能发送完一个字节。 在STC89C52上,有两个引脚,是专门用来做UART串口通信的,一个是P3.0一个是P3.1,还分别有另外的名字叫做RXD和TXD,这两个引脚是专门用来进行UART通信的,如果我们两个单片机进行UART串口通信的话,那基本的演示图如图3-1所示。 图3-1 单片机之间UART通信示意图 图中,GND表示单片机系统电源的参考地,TXD是串行发送引脚,RXD是串行接收引脚。两个单片机之间要通信,首先电源基准得一样,所以我们要把两个单片机的GND相互连起来,然后单片机1的TXD引脚接到单片机2的RXD引脚上,即此路为单片机1发送而单片机2接收的通道,单片机1的RXD引脚接到单片机2的TXD引脚上,即此路为单片机2发送而单片机2接收的通道。这个示意图就体现了两个单片机各自收发信息的过程。 当单片机1想给单片机2发送数据时,比如发送一个0xE4这个数据,用二进制形式表示就是0b11100100,在UART通信过程中,是低位先发,高位后发的原则,那么就让TXD 首先拉低电平,持续一段时间,发送一位0,然后继续拉低,再持续一段时间,又发送了一位0,然后拉高电平,持续一段时间,发了一位1......一直到把8位二进制数字0b11100100全双工与半双工知识
UART串口通信设计实例
单工,半双工,全双工的含义及区别
单工半双工全双工的含义及区别
单工,半双工,全双工的含义及区别
dsp实验-UART串口通信实验
UART串行口简介
全双工与半双工
SPI、I2C、UART三种串行总线的原理、区别及应用
串行通讯简单认识 单工、半双工和全双工的定义
UART串口通信实验报告
单工-半双工-全双工的含义及区别
UART串口通信实验报告
RS485数据全双工、半双工的定义与应用
多址和双工的区别
串口通讯—全双工和半双工方式
实验四 UART串口通信实验报告
实验七 UART串口通信