MX620B芯片手册中文版

概述
该产品为电池供电的玩具、低压或者电池供电的运动控制应用提供了一种集成的有刷直流马达驱动解决方案。电路内部集成了采用N沟和P沟功率MOSFET设计的H桥驱动电路,适合于驱动有刷直流马达或者驱动步进马达的一个绕组。该电路具备较宽的工作电压范围(从2V到9.6V),最大持续输出电流达到2A,最大峰值输出电流达到 3.5A。
该驱动电路内置过热保护电路。通过驱动电路的负载电流远大于电路的最大持续电流时,受封装散热能力限制,电路内部芯片的结温将会迅速升高,一旦超过设定值(典型值150℃),内部电路将立即关断输出功率管,切断负载电流,避免温度持续升高造成塑料封装冒烟、起火等安全隐患。内置的温度迟滞电路,确保电路恢复到安全温度后,才允许重新对电路进行控制。
该驱动电路内置限流保护电路。当流过功率管的电流超过设定值时,内部电路限流保护电路启动,功率管最大输出电流将被限制在设定值。该功能可确保电路输出端口与地短路、输出端口之间短路时,电路不烧毁。
特性
●低待机电流(小于0.1uA);
●低静态工作电流;
●集成的H桥驱动电路;
●内置防共态导通电路;
●低导通内阻的功率MOSFET管;
●内置带迟滞效应的过热保护电路(TSD);
●内置限流保护电路,输出对地短路,输出与输出短路,不烧电路;
●抗静电等级:3KV(HBM)。
典型应用
●2-6节AA/AAA干电池供电的玩具马达驱动;
●2-6节镍-氢/镍-镉充电电池供电的玩具马达驱动;
●1-2节锂电池供电的马达驱动
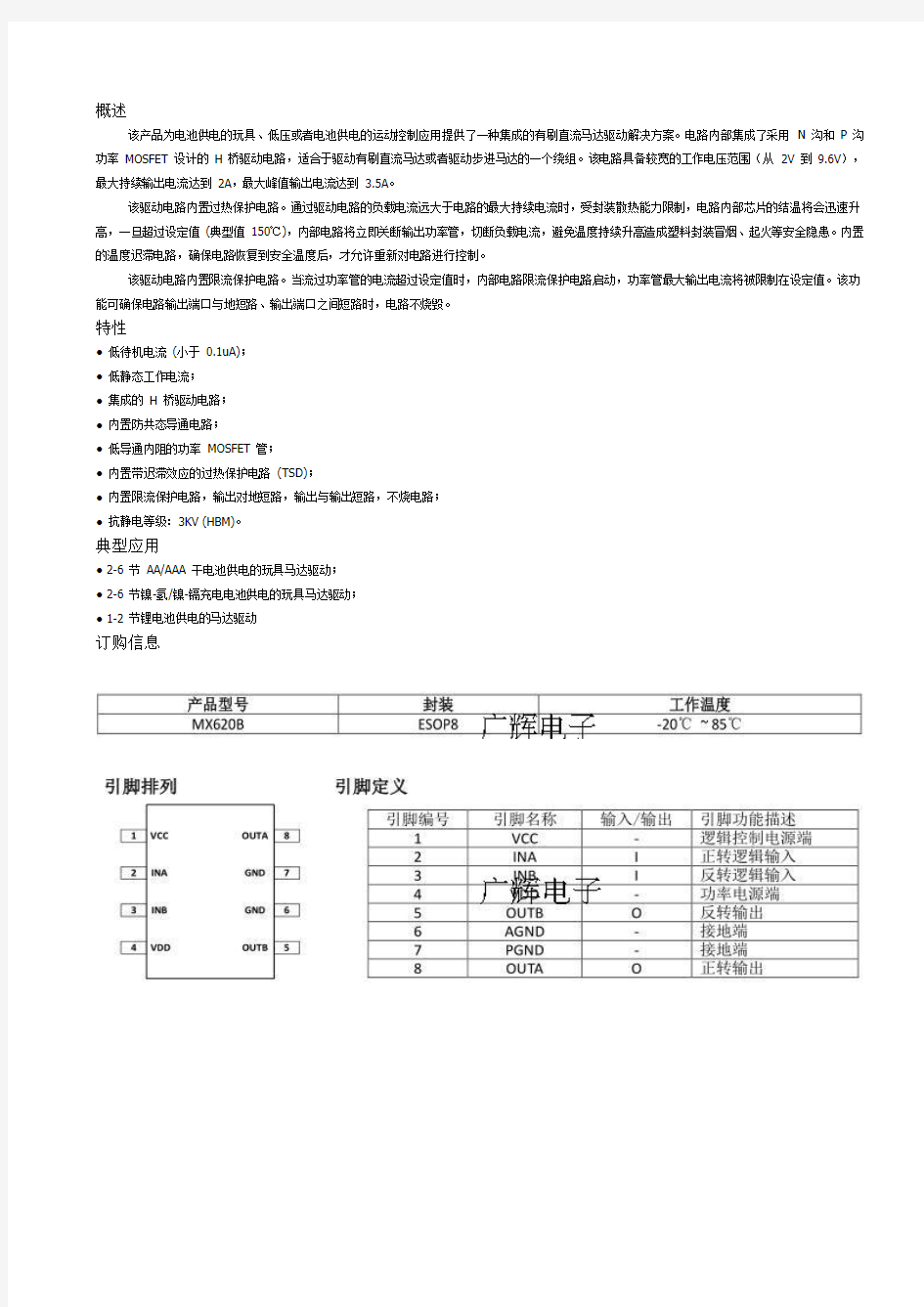
订购信息
应用说明
1、基本工作模式
a)待机模式
在待机模式下,INA=INB=L。包括驱动功率管在内的所有内部电路都处于关断状态。电路消耗极低极低的电流。此时马达输出端OUTA和OUTB 都为高阻状态。
b)正转模式
正转模式的定义为:INA=H,INB=L,此时马达驱动端OUTA输出高电平,马达驱动端OUTB输出低电平时,马达驱动电流从OUTA流入马达,从OUTB流到地端,此时马达的转动定义为正转模式。
c)反转模式
反转模式的定义为:INA=L,INB=H,此时马达驱动端OUTB输出高电平,马达驱动端OUTA输出低电平时,马达驱动电流从OUTB流入马达,从OUTA流到地端,此时马达的转动定义为反转模式。
d)刹车模式
刹车模式的定义为:INA=H,INB=H,此时马达驱动端OUTA以及OUTB都输出低电平,马达内存储的能量将通过OUTA端NMOS管或者OUTB端NMOS快速释放,马达在短时间内就会停止转动。注意在刹车模式下电路将消耗静态功耗。
e)PWM模式A
当输入信号INA为PWM信号,INB=0或者INA=0,INB为PWM信号时,马达的转动速度将受PWM信号占空比的控制。在这个模式下,马达驱动电路是在导通和待机模式之间切换,在待机模式下,所有功率管都处于关断状态,马达内部储存的能量只能通过功率MOSFET的体二极管缓慢释放。
注意:在PWM模式A下,当输入信号从高电平跳变为低电平时,按照逻辑要求H桥的4个功率管必须全部进入关断的状态。MX620B内部设计了关断延迟电路,当输入信号从高电平跳变到低电平时,H桥的NMOS功率管立即关断,而高边的PMOS管仍然会维持30us的导通时间,在此期间电机电流通路如下所示。
f)PWM模式B
当输入信号INA为PWM信号,INB=1或者INA=1,INB为PWM信号时,马达的转动速度将受到PWM信号占空比的控制。在这个模式下,马达驱动电路输出在导通和刹车模式之间,在刹车模式下马达存储的能量通过低边的NMOS管快速释放。
2、防共态导通电路
在全桥驱动电路中,将半桥内的高边PMOS功率管和低边NMOS功率管同时导通的状态称为共态导通状态。共态导通将出现一个电源至地的瞬态大电流,该电流会引起额外的功耗损失,极端情况下会烧毁电路。通过内置死区时间,可避免共态导通。典型的死区时间为300ns。
3、过热保护电路
当驱动电路结温超过预设温度(典型值为150℃)时,TSD电路开始工作,此时控制电路强制关断所有输出功率管,驱动电路输出进入高阻状态。TSD电路中设计了热迟滞,只有当电路的结温下降到预设温度(典型值130℃)时,电路返回正常工作状态。
4、限流保护电路
电路内部的比较电路能够实时检测PMOS功率管的导通压降,当导通压降超过内部设定值时,功率管驱动电路将驱动功率PMOS进入线性恒流模式,其最大输出电流由内部电路限制。结温为27摄氏度时,最大输出电流限制在8A。结温为140度时,最大输出电流限制在4A。当输出与地短路或者输出与输出短路时,内部限流保护电路将保护电路不会立即烧毁。由于短路时所有的功耗都消耗在电路上,因此电路温度急剧上升,电路将立即进入过热关断保护状态。虽然,在短路状态下电路不会立即烧毁,但如果芯片长期处于短路状态,内部结温过高,将会对芯片的寿命造成一定影响。5、驱动电路最大持续功耗
该系列马达驱动电路内部均设计有过热保护电路,因此当驱动电路消耗的功耗过大时,电路将进入热关断模式,热关断状态下马达将无法正常工作。驱动电路最大持续功耗的计算公式为:
P M=(150℃-T A)/θJA
其中150℃为热关断电路预设温度点,T A为电路工作的环境温度(℃),θJA为电路的结到环境的热阻(单位℃/W)。注意:驱动电路的最大持续功耗与环境温度、封装形式以及散热设计等因素有关,与电路导通内阻并无直接关系。
6、驱动电路功耗
马达驱动电路内部功率MOSFET的导通内阻是影响驱动电路功耗的主要因素。驱动电路功耗的计算公式为:P D=I L2*R ON其中I L表示马达驱动电路的输出电流,R ON表示功率MOSFET的导通内阻。
注意:功率MOSFET的导通内阻随着温度的升高而升高,在计算电路的最大持续输出电流以及功耗时必须考虑导通内阻的温度特性。
7、驱动电路最大持续输出电流
根据驱动电路的最大持续功耗以及驱动电路功耗可计算出驱动电路的最大持续输出电流,计算公式为:
其中的R ONT为考虑温度特性后的功率MOSFET导通内阻。
注意:驱动电路的最大持续输出电流与环境温度、封装形式、散热设计以及功率MOSFET的导通内阻等因素有关。
8、马达内阻选择
上述分析表明,马达驱动电路的最大持续功耗有限。如果马达驱动电路所驱动马达内阻极小,其堵转电流超过马达驱动电路所能承受的最大持续输出电流太多,则很容易导致马达驱动电路进入过热关断状态,玩具车在跑动或者反复前进、后退时将出现抖动的现象。在马达驱动电路选型时,必须考虑马达的内阻.
特别注意事项
1、电源与地反接
将电路的电源与地线反接,将导致电路损坏,严重时会导致塑料封装冒烟。可考虑在电路的电源端串联一个功率肖特基二极管至电池的正端,可防止由于电池接反引起的电路损坏。功率肖特基二极管的最大持续电流能力必须大于马达堵转的持续电流,否则肖特基二极管会因为过热而损坏。功率肖特基二极管的反向击穿电压必须大于最高电源电压,如果反向击穿电压过小,当电池反接时,会击穿肖特基二极管造成烧毁。
2、功率电源VDD对地去耦电容(C1)
驱动电路要求添加的功率电源VDD对地去耦电容C1(参考应用线路图1)主要有两个作用:1)、吸收马达向电源释放的能量,稳定电源电压,避免电路因为过压而击穿;2)、在马达起动或者快速正转、反转切换的瞬间,马达需要瞬间大电流才能迅速启动。由于电池的响应速度以及连接引线较长,往往不能立即输出瞬态大电流,此时需要依赖靠近马达驱动电路附近的储能电容释放出瞬态大电流。
根据电容的储能特性,电容容值越大,相同时间内的电压波动越小,因此在高压、大电流的应用条件下建议电容C1取值100uF,建议根据具体的应用选择电容值,但是该电容C1取值至少需要 4.7uF。
3、静电防护
电路的输入/输出端口采用了CMOS器件,对静电放电敏感。虽然设计有静电防护电路,但在运输、包装、加工、储存过程中应该采取防静电措施,尤其是在加工过程中应重点考虑防静电。
4、输出对地短路、输出端短路
电路内部设计有限流保护电路,可以保护电路在遇到短路等异常状况时不会立即损坏。但切不可将电路长期工作在短路状态下,会对芯片的寿命造成影响。
5、输出对电源短路
在正常工作时,当电路的低电平输出端与电源发生短路时,电路将会被立即损坏。
6、最大峰值电流
电路内部设计了限流电路,在芯片结温较高时,峰值电流较小,此时可能会引起电机正、反切换不能及时响应的情况,在方案评估阶段需要特别注意。合理选择电机的最大峰值电流。
封装外形尺寸图
飞思卡尔智能汽车设计技术报告
第九届“飞思卡尔”杯全国大学生 智能汽车竞赛 技术报告 学校:武汉科技大学队 伍名称:首安二队参赛 队员:韦天 肖杨吴光星带队 教师:章政 0敏
I
关于技术报告和研究论文使用授权的说明 本人完全了解第九届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名: 带队教师签名: 日期:
II
目录 第一章引言 (1) 1.1 概述 (1) 1.2 内容分布 (1) 第二章系统总体设计 (2) 2.1 设计概述 (3) 2.2 控制芯片的选择 (3) 2.3 线性 CCD 检测的基本原理 (3) 2.3 系统结极 (5) 第三章机械系统设计 (7) 3.1 底盘加固 (7) 3.2 轮胎处理 (7) 3.3 四轮定位 (8) 3.4 差速器的调整 (12) 3.5 舵机的安装 (13) 3.6 保护杆的安装 (15) 3.7 CCD的安装 (16) 3.8 编码器的安装 (17) 3.9 检测起跑线光电管及加速度计陀螺仪的安装 (18) 第四章硬件系统设计 (19) 4.1 最小系统版 (20) 4.2 电源模块 (21) 4.3 CCD模块 (22) 4.4 驱动桥模块 (23) 4.5 车身姿态检测模块 (24) 4.7 测速模块 (24) 4.8 OLED液晶屏及按键、拨码 (25) 第5章程序设计 (27)
74HC595中文芯片手册
74HC595 8位移位寄存器与输出锁存器 功能描述 这种高速移位寄存器采用先进的硅栅CMOS技术。该装置具有高的抗干扰性和标准CMOS集成电路的低功率消耗,以及用于驱动15个LS-TTL负载的能力。 此装置包含馈送一个8位D型存储寄存器的8位串行入,并行出移位寄存器。存储寄存器具有8 TRI-STATE e输出。提供了用于两个移位寄存器和存储寄存器独立的时钟。 移位寄存器有直接首要明确,串行输入和串行输出(标准)引脚级联。两个移位寄存器和存储寄存器的使用正边沿触发的时钟。如果两个时钟被连接在一起时,移位寄存器的状态 将总是提前存储寄存器的一个时钟脉冲。 该54HC/74HC逻辑系列就是速度,功能和引脚输出与标准54LS/74LS逻辑系列兼容。所有输入免受损害,由于静电放电由内部二极管钳位到VCC和地面。 产品特点 1低静态电流:80 mA最大值(74HC系列) 2低输入电流为1mA最大 38位串行输入,并行出移位寄存器以存储 4宽工作电压范围:2V ± 6V 5级联 6移位寄存器直接明确 7保证移频率:DC至30兆赫
TL/F/5342-1 Top View Order Number MM54HC5S5 or MM74HC595 DuaHn-Line Package RCK SCK SCLR G Function X X X H Q A thruQH = TRI-STATE X X L L Shift Register cleared Q H -O X T H L Shift Register clocked C)N = Qnd ,Qo = SER T X H L Con tents of Shift Register transferred to output latches Operating Conditions Supply Voltage (V QC ) -0.5 to +7.0V DC Input Voltage (V IM ) -1.5 toV C c+15V DC OutpiX Voltage (V OUT ) -0.5 toVcc+0.5V Clamp Diode Current (I IK . I(X ) ±20 mA DC Output Current, per pin (lour) ±35 mA DC Vcc or GND Current, per pin (Icc) ±70 mA Storage Temperature Range (T STG ) -65"Cto+15(rC Power Dissipation (P Q ) (Note 3) 600 mW S.O. Package only 500 mW Lead Temp. (TO (Sobering 10 seconds) 2?TC Min Max Units Supply Voltage (Vcc) 2 6 V DC Input or Outpu* Voltage 0 Vcc V (Vw. VOUT ) Operating Temp. Range (T A ) MM74HC -40 +85 ?c MM54HC -55 + 125 ?c Input Rise or Fall Times VOC-20V 1000 ns V QC -4.5V 500 ns Vcc-6.0V 400 ns Absolute Maximum Ratings (Notes 1&2) If Military/Aerospace specified devices are required, please contact the National Semiconductor Sales Office/Distributors for availability and specifications ?
基于嵌入式STM32的飞思卡尔智能车设计
摘
要
飞思卡尔智能车大赛是面向全国大学生举办的应用型比赛, 旨在培养创新精 神、协作精神,提高工程实践能力的科技活动。大赛主要是要求小车自主循迹并 在最短时间内走完整个赛道。针对小车所安装传感器的不同,大赛分为光电组、 电磁组和摄像头组。 本文介绍了本院自动化系第一届大学生智能汽车竟赛的智能车系统。 包括总 体方案设计、机械结构设计、硬件电路设计、软件设计以及系统的调试与分析。 机械结构设计部分主要介绍了对车模的改进,以及舵机随动系统的机械结构。硬 件电路设计部分主要介绍了智能车系统的硬件电路设计, 包括原理图和 PCB 设计 智能车系统的软、 硬件结构及其开发流程。该智能车车模采用学校统一提供的飞 思卡尔车模,系统以 STM32F103C8T6 作为整个系统信息处理和控制命令的核心, 使用激光传感器检测道路信息使小车实现自主循迹的功能
关键字:飞思卡尔智能车STM32F103C8T6
激光传感器
第一章 概述
1.1 专业课程设计题目
基于嵌入式 STM32 的飞思卡尔智能车设计
1.2 专业课程设计的目的与内容
1.2.1 目的 让学生运用所学的计算机、传感器、电子电路、自动控制等知识,在老师的 指导下,结合飞思卡尔智能车的设计独立地开展自动化专业的综合设计与实验, 锻炼学生对实际问题的分析和解决能力,提高工程意识,为以后的毕业设计和今 后从事相关工作打下一定的基础。 1.2.2 内容 本次智能车大赛分为光电组和创新做,我们选择光电组小车完成循迹功能。 该智能车车模采用学校统一提供的飞思卡尔车模, 系统以 STM32F103C8T6 作为整 个系统信息处理和控制命令的核心,我们对系统进行了创造性的优化: 其一, 硬件上采用激光传感器的方案, 软件上采用 keil 开发环境进行调试、 算法、弯道预判。 其二,传感器可以随动跟线,提高了检测范围。 其三,独立设计了控制电路板,充分利用 STM32 单片机现有模块进行编程, 同时拨码开关、状态指示灯等方便了算法调试。
1.3 方案的研讨与制定
1.3.1传感器选择方案 方案一:选用红外管作为赛道信息采集传感器。 由于识别赛道主要是识别黑白两种不同的颜色, 而红外对管恰好就能实现区 分黑白的功能,当红外光照在白色KT板上时,由于赛道的漫反射作用,使得一部 分红外光能反射回来, 让接收管接的输出引脚的电压发生变化,通过采集这个电 压的变化情况来区分红外光点的位置情况,以达到区分赛道与底板的作用。 红外管的优点在于价格便宜,耐用;缺点却用很多:1、红外光线在自然环 境中,无论是室内还是室外均比较常见,就使得其抗干扰能力不强,容易受环境 变化的影响。2、调试不方面,由于红外光是不可见光,调试的时候需要采用比 较麻烦的方法来判断光电的位置。3、由于红外管光线的直线性不好,就使得红 外传感器所能准确的判断的最远距离比较小,也就是通常所说的前瞻不够远。
飞思卡尔K60 DMA 中文手册
/*----------------------------------------------------------------------------------------------------------------------------- 桂林电子科技大学 物联网工程 Editor:JaceLin Date:2014.2.5 -------------------------------------------------------------------------------------------------------------------------------- 一、DMA特性 1)k60有16个DMA通道 二、寄存器 1)控制寄存器:DMA_CR 31-18 reserved 17 CX 取消转移,0正常操作,1取消剩下数据转移 16 ECX 错误取消转移,0正常操作,1取消转移 15-8 reserved 14 EMLM 使能副循环映射 0 禁止,TCDn.word2 为32位 1 使能,TCDn.word被重新定义 6 CLM 持续连接模式,0当副循环结束后,再次激活DMA要通过裁决,1不用裁决 5 HALT 停止DMA操作,0正常模式,1停止DMA操作 4 HOE 错误时停止,0正常操作,1当有错误时HALT=1,也就是DMA停止 3 reserved 2 ERCA 使能循环通道裁决, 1 EDBG 使能调试,写0,调试也用DMA,写1,调试时DMA不可用 0 reserved 2)错误状态寄存器DMA_ES 31 VLD 所有错误状态位逻辑或,0没有错误,1表示至少有1个错误没有清除 30-17 保留 16 ECX 转移被取消0没有被取消的转移,1最后一次记录是被取消的转移 15 保留 14 CPE 通道优先错误,0没有通道优先错误,1有 13-12 保留 11-8 ERRXHN 错误通道位/被取消的位(最多16位) 7 SAE 源地址错误,0没有源地址配置错误,1有错误 6 SOE 源偏移错误,0没有源偏移配置错误,1有偏移配置错误 5 DAE 目标地址错误,0没有错,1有错误 4 DOE 目标偏移错误,0没有错误,1有 3 NCE NBYTES/CITER配置错误,0没有,1有 2 SGE Scatter/Gather配置错误,0没有,1有 1 SBE 源总线错误,0没有错误,1有
飞思卡尔16位单片机MC9S12XS128加密(程序下载不进去,正负极未短路,通电芯片不发烫)后解锁的方法及步骤w
飞思卡尔16位单片机MC9S12XS128加密(程序下载不进去,正负极未短路,通电芯片不发烫)后解锁的方法及步骤 /*****************************************************************************/ *本人用此法成功解救了4块板子【窃喜!】,此说明是本人边操作边截图拼成的,有些是在别的说明上直接截图【有些图本人不会截取,就利用现成的了,不过那也是本人用豆和财富值换来的】,表达不清之处还望见谅,大家将就着看吧!如能有些许帮助,我心甚慰!!! ————武狂狼2014.4.23 /*****************************************************************************/ 编译软件:CW5.1版本,下载器:飞翔BDMV4.6 【1】,连接好单片机,准备下载程序,单击下载按钮出现以下界面 或 (图1.1) 图 1.1——4中所有弹出窗口均单击“取消”或红色“关闭”按钮依次进入下一界面
(图1.2) (图1.3)
(图1.4) ******************************************************************************* ******************************************************************************* 【2】单击出现如下图所示下拉列表,然后单击 (图2.1) 出现下图(图2.2)对话框,按下面说明操作 (图2.2)
芯片手册
74系列 74ls48 BCD—7段译码器-内部上拉输出驱动 1 7473 TTL 带清除负触发双J-K触发器 1 7474 TTL 带置位复位正触发双D触发器 2 7476 TTL 带预置清除双J-K触发器 2 7483 TTL 四位二进制快速进位全加器 3 7485 TTL 四位数字比较器 4 7486 TTL 2输入端四异或门 5 7490 TTL 可二-五分频十进制计数器 5 7495 TTL 四位并行输入-输出移位寄存器7 74107 TTL 带清除主从双J-K触发器8 74109 TTL 带预置清除正触发双J-K触发器8 74122 TTL 可再触发单稳态多谐振荡器9 74126 TTL 三态输出低有效四总线缓冲门9 74138 TTL 3-8线译码器-复工器10 74139 TTL 双2-4线译码器-复工器11 74150 TTL 16选1数据选择-多路开关12 74154 TTL 4线—16线译码器13 74157 TTL 同相输出四2选1数据选择器14 74160 TTL 可预置BCD异步清除计数器15 74165 TTL 八位并行入-串行输出移位寄存器16 74166 TTL 八位并入-串出移位寄存器16 74169 TTL 二进制四位加-减同步计数器17 74173 TTL 三态输出四位D型寄存器18 74174 TTL 带公共时钟和复位六D触发器18 74175 TTL 带公共时钟和复位四D触发器19 74180 TTL 9位奇数-偶数发生器-校验器20 74185 TTL 二进制—BCD代码转换器21 74192 TTL 可预置BCD双时钟可逆计数器22 74194 TTL 四位双向通用移位寄存器22 74197 TTL 二进制可预置锁存器-计数器23 74245 TTL 八同相三态总线收发器23 74247 TTL BCD—7段15V输出译码-驱动器23 74248 TTL BCD—7段译码-升压输出驱动器24 74273 TTL 带公共时钟复位八D触发器24 74299 TTL 三态输出八位通用移位寄存器25 74323 TTL 三态输出八位双向移位-存贮寄存器25 CD系列 4008 CMOS 4位二进制并行进位全加器26 4013 CMOS 带置位-复位的双D触发器28 4014 CMOS 8级同步并入串入-串出移位寄存器29
74HC系列芯片型号与功能介绍
电子元件知识-74系列芯片功能略表 74HC01 2输入四与非门 (oc) 74HC02 2输入四或非门 74HC03 2输入四与非门 (oc) 74HC04 六倒相器 74HC05六倒相器(oc) 74HC06 六高压输出反相缓冲器/驱动器(oc,30v) 74HC07 六高压输出缓冲器/驱动器(oc,30v) 74HC08 2输入四与门 74HC09 2输入四与门(oc) 74HC10 3输入三与非门 74HC11 3输入三与门 74HC12 3输入三与非门 (oc) 74HC13 4输入双与非门 (斯密特触发) 74HC14 六倒相器(斯密特触发) 74HC15 3输入三与门 (oc) 74HC16 六高压输出反相缓冲器/驱动器(oc,15v) 74HC17 六高压输出缓冲器/驱动器(oc,15v) 74HC18 4输入双与非门 (斯密特触发) 74HC19 六倒相器(斯密特触发) 74HC20 4输入双与非门 74HC21 4输入双与门 74HC22 4输入双与非门(oc) 74HC23 双可扩展的输入或非门 74HC24 2输入四与非门(斯密特触发) 74HC25 4输入双或非门(有选通) 74HC26 2输入四高电平接口与非缓冲器(oc,15v) 74HC27 3输入三或非门 74HC28 2输入四或非缓冲器 74HC30 8输入与非门 74HC31 延迟电路 74HC32 2输入四或门 74HC33 2输入四或非缓冲器(集电极开路输出) 74HC34 六缓冲器 74HC35 六缓冲器(oc) 74HC36 2输入四或非门(有选通) 74HC37 2输入四与非缓冲器 74HC38 2输入四或非缓冲器(集电极开路输出) 74HC39 2输入四或非缓冲器(集电极开路输出) 74HC40 4输入双与非缓冲器 74HC41 bcd-十进制计数器 74HC42 4线-10线译码器(bcd输入) 74HC43 4线-10线译码器(余3码输入) 74HC44 4线-10线译码器(余3葛莱码输入)
freescale MC9S12P128中文手册
1 Chapter1 Device Overview MC9S12P-Family 1.1介绍 The MC9S12P 系列单片机是经过优化后有着低成本、高性能、低引脚数的汽车专业级单片机产品,该产品倾向于弥补高端16位单片及产品如MC9S12XS和低端8位单片机产品之间的空缺。MC9S12P 主要针对于要求使用CAN 或者LIN/J2602通讯接口的汽车应用产品,典型的应用案例包括车身控制器、乘坐人员检测、车门控制、座椅控制、遥控车门开关信号接收器、智能执行器、车灯模块、智能接线器。 The MC9S12P 系列单片机使用了很多MC9S12XS系列单片机相同的功能,包括片内闪存错误纠正代码(ECC)、一个专为数据诊断或者数据存储的单独的数据闪存模块、高速AD转换器和高频调制锁相环(IPLL)有效改善电磁兼容性能。MC9S12P系列单片机提供的所有16为单片机优点和微处理器效率,同时保持飞思卡尔用户熟悉的8位及16位单片机,低成本,功耗,EMC和高效的代码80针QFP、64针LQFP、40针QFN封装产品,最大限度的与MC9S12尺寸的优点,如同MC9S12XS一样可以无需等待外围设备和内存的状态既可以运行16为带款的寻址,MC9S12P系列单片机主要有XS引脚兼容. I/O口在各种模式下都可以使用,同时具有中断功能的I/O口还可以在停止或等待模式下唤醒。 1.2 芯片特性 表一:提供了MC9S12P家庭成员特征摘要, 1.P或D寄存器擦除或者编程需要最低总线频率为1MHZ
1.2.2 芯片功能 ? S12 CPU 内核 ? 高达128 KB具有ECC功能的片上闪存 ? 4 Kbyte带ECC功能的数据闪存 ? 高达6 Kb片上静态存储器(SRAM) ? 具有内部滤波器的锁相环倍频器(IPLL) ? 4–16 MHz 皮尔斯振荡器 ? 1 MHz内部RC振荡器 ? 定时器(TIM) 具有16位输入捕捉、输出比较、计数器脉冲累加器功能 ? 具有8位6通道的脉冲调制模块(PWM) ? 10通道12位分辨率的逐次逼近AD转换器 ? 1个串行通信外部接口(SPI) ? 1个支持局域网通讯串行通信(SCI) 模块 ?一个多可扩展控制器区域网络(MSCAN) 模块(支持CAN 协议2.0A/B) ?片上电压调节器(VREG) 可对内部供电及内部电压整流 ? 自主周期中断(API) 1.3 模块特征 1.3.1 CPU S12 CPU 是一个高速的16位处理单元: ?全16-bit数据通道提供有效的数学运算和高速的数学执行 ? 包含很多单字节指令,可以有效的利用ROM空间 ? 宽域变址寻址功能: —采用堆栈指针作为所有变址操作的变址寄存器 —除了在自增或自减模式下都可以利用程序计数器作为变址寄存器 —使用A\B\D累加器做累加器偏移 —自动变址,前递增(++a)、前递减(--a)、后递减(a--)、后递增(a++)(by –8 to +8) 1.3.2 带ECC功能的片内闪存 ? 高达128 Kb程序闪存空间 — 32 位数据加7 位ECC (纠错码) 允许单字节纠错和双字节纠错 — 512字节擦出扇区空间 —自动编程和擦除算法 —用户设置读写页面边界 —具有可以防止偶然编程或者擦除的保护结构 ? 4 Kb 数据闪存空间 — 16 位数据加6位纠错码允许单字节和双字节纠错功能 — 256 字节的擦出扇区空间 —自动编程和擦除算法 —用户设置读写页面边界 1.3.3 片内静态存储器
SSD1306 OLED驱动芯片中文手册
简介 SSD1306是一个单片CMOS OLED/PLED驱动芯片可以驱动有机/聚合发光二极管点阵图形显示系统。由128 segments 和64 Commons组成。该芯片专为共阴极OLED面板设计。 SSD1306中嵌入了对比度控制器、显示RAM和晶振,并因此减少了外部器件和功耗。有256级亮度控制。数据/命令的发送有三种接口可选择:6800/8000串口,I2C接口或SPI接口。适用于多数简介的应用,注入移动电话的屏显,MP3播放器和计算器等。 特性 1.分辨率:128 * 64 点阵面板 2.电源: a)VDD = 1.65V to 3.3V 用于IC逻辑 b)VCC = 7V to 15V 用于面板驱动 3.点阵显示 a)OLED驱动输出电压,最大15V b)Segment最大电流:100uA c)常见最大反向电流:15mA d)256级对比亮度电流控制 4.嵌入式128 * 64位SRAM显示缓存 5.引脚选择MCU接口 a)8位6800/8000串口 b)3/4线SPI接口 c)I2C接口 6.水平和垂直两个方向的屏幕保存连续滚动功能。 7.RAM写同步信号 8.可编程的帧率和多重比率 9.行重映射和列冲映射 10.片上晶振 11.两种封装 COG和COF 12.工作温度范围广:‐40℃ to 85℃ 订购信息 暂不翻译
结构方框图 功能块描述 MCU接口选择 SSD1306MCU接口由8个数据引脚和5个控制引脚组成。引脚分配由不同的接口选择决定, 详情如下表。不同的MCU模块可以通过BS[2:0]引脚的硬件选择设置。
MCU 并口 6800系列接口 不翻译 MCU 并口8080系列接口 不翻译 MCU串口(4‐wire SPI) 不翻译 MCU串口(3‐wire SPI) 不翻译 MCU I2C 接口 I2C通讯接口由从机地址为SA0,I2C总线数据信号(SDAout/D2输出和SDAin/D1输入)和I2C 总线时钟信号SCL(D0)组成。数据和时钟信号线都必须接上上拉电阻。RES#用来初始化设备。 a.从机地址位(SA0) SSD1306在发送或接受任何信息之前必须识别从机地址。设备将会响应从机地址,后面跟随着从机地址位(SA0位)和读写选择位(R/W#位),格式如下: b7 b6 b5 b4 b3 b2 b1 b0 0 1 1 1 1 0 SA0 R/W# SA0位为从机地址提供了一个位的拓展。0111100或0111101都可以做为SSD1306的从机地址。D/C#引脚作为SA0用于从机地址选择。R/W#为用来决定I2C总线接口的操作模式。R/W# = 1,读模式。R/W# = 0 写模式 b.I2C总线数据信号SDA SDA作为发送者和接受者之间的通讯通道。数据和应答都是通过SDA发送。 应该注意的是ITO轨道电阻和SDA引脚上的上拉电阻会变成一个潜在的电压分压器。结
飞思卡尔汽车芯片
飞思卡尔推出业界最强大的汽车动力总成系统微 控制器 2011-10-14 18:05:18 来源:与非网 关键字:飞思卡尔Qorivva MCU 动力总成控制系统 2011年10月12日-德国巴登(2011汽车电子系统展览会)–汽车厂商继续通过新的汽车设计将业界标准提升至新高度,通过交付具有更高燃油经济性和更低排放的汽车满足消费者的期望和政府的法规要求。高性能微控制器(MCU)在环保汽车设计领域扮演着重要角色,飞思卡尔半导体(NYSE:FSL)日前宣布推出强大的多核心汽车MCU系列中的第一款产品,帮助汽车设计者更加轻松地提高引擎效率并降低排放污染。 飞思卡尔新推出的多核心Qorivva 32位MPC5676R MCU在Power Architecture?技术的基础上构建,与上一代单核心MPC5566 MCU相比,性能提高了四倍、内存空间提高了一倍、并提供了更多功能。MPC5676R的多种优势允许全球汽车厂商在单一控制器中融合多种尖端技术,例如直喷、涡轮增压和有线系统全驱动。 飞思卡尔负责汽车MCU业务副总裁Ray Cornyn表示,“飞思卡尔充分了解帮助汽车厂商生产更加环保、燃油效率更高的汽车所需的关键技术及其重要性,长期以来我们一直与汽车行业合作,共同开发可以满足其最新一代设计需求的解决方案。在动力总成领域,我们的目标是生产最强大、最灵活的MCU,它可以同时管理最新引擎的所有复杂控制任务,为设计者提供了降低系统复杂性所需的工具和软件平台。” 90纳米双核心MPC5676R MCU配备了: ? 6 MB片上闪存 ?384 KB片上RAM ?三个高性能增强型时序处理器单元(eTPU)
飞思卡尔MC9S12XS128技术手册翻译AD
飞思卡尔MC9S12XS128技术手册(AD转换部分) 英文资料:飞思卡尔MC9S12XS256RMV1官方技术手册 1.1 XS12系列单片机的特点 XS12系列单片机特点如下: ·16位S12CPU —向上支持S12模糊指令集并去除了其中的MEM, WAV, WAVR, REV, REVW 五条指令; —模块映射地址机制(MMC); —背景调试模块(BDM); ·CRG时钟和复位发生器 —COP看门狗; —实时中断; ·标准定时器模块 —8个16位输入捕捉或输出比较通道;; —16位计数器,8位精密与分频功能; —1个16位脉冲累加器; ·周期中断定时器PIT —4具有独立溢出定时的定时器; —溢出定时可选范围在1到2^24总线时钟; —溢出中断和外部触发器; ·多达8个的8位或4个16位PWM通道 —每个通道的周期和占空比有程序决定; —输出方式可以选择左对齐或中心对其; —可编程时钟选择逻辑,且可选频率范围很宽; ·SPI通信模块 —可选择8位或16位数据宽度;
—全双工或半双工通信方式; —收发双向缓冲; —主机或从机模式; —可选择最高有效为先输出或者最低有效位先输出; ·两个SCI串行通信接口 —全双工或半双工模式 ·输入输出端口 —多达91个通用I/O引脚,根据封装方式,有些引脚未被引出; —两个单输入引脚; ·封装形式 —112引脚薄型四边引线扁平封装(LQFP); —80引脚扁平封装(QFP); —64引脚LQFP封装; ·工作条件 —全功率模式下单电源供电范围3.15V到5V; —CPU总线频率最大为40MHz —工作温度范围–40 C到125 C 第十章模拟—数字转换 10.1 介绍 ADC12B16C是一个16通道,12位,复用方式输入逐次逼近模拟—数字转换器。 ATD的精度由电器规格决定。 10.1.1 特点 ·可设置8位、10位、12位精度 ·在停止模式下,ATD转换使用内部时钟 ·转换序列结束后自动进入低耗电模式 ·可编程采样时间 ·转化结果可选择左对齐或右对齐
74HC系列芯片资料
74HC00 四2 输入与非门 国际通用符号 54/7400 ,54/74H00 ,54L 00 ,54/74S00 ,54/74LS00 ,54/74ALS00 ,54/ 74F 00 ,54/74HC00 ,54/ 74AC 00 ,54/74HCT00 ,54/74ACT00 ,54/74AHC00 , 54/74AHCT00 ,74LV00 ,74LVC00 。 74HC02 四2 输入或非门 国际通用符号 54/7402 ,54L 02 ,54/74S02 ,54/74LS02 ,54/74AS02 ,54/74ALS02 ,54/ 74F 02 ,54/74HC02 ,74AC 02 ,54/74HCT02 ,54/74ACT02 ,54/74AHC02 , 54/AHCT02 ,74LV02 ,74LVC02 。
74HC04 六反相器 国际通用符号 54/7404 ,54L 04 ,54/74H04 ,54/74S04 ,54/74LS04 ,54/74AS04 ,54/74ALS04 ,54/ 74F 04 ,54/74HCU04 ,54/74HC04 ,54/ 74AC 04 ,54/74HCT04 , 54/74ACT04 ,54/74AHC04 ,54/74AHCT04 ,74LV04 ,74LVC04 ,54/74AHCU04 ,74LVU04 ,74LVCU04 。 74HC08 四2 输入与门 国际通用符号 54/7408 ,54/74S08 ,54/74LS08 ,54/74AS08 ,54/74ALS08 ,54/ 74F 08 , 54/74HC08 ,54/74HCT08 ,54/ 74AC 08 ,54/74ACT08 ,54/74AHC08 , 54/74AHCT08 ,74LV08 ,74LVC08 。
飞思卡尔智能车技术报告
第六届“飞思卡尔”杯全国大学生智能汽车邀请赛技术报告 学校: 队伍名称: 参赛队员: 带队教师:
关于技术报告和研究论文使用授权的说明 本人完全了解第六届“飞思卡尔”杯全国大学生智能汽车邀请赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。 参赛队员签名: 带队教师签名: 日期: 摘要 随着现代科技的飞速发展,人们对智能化的要求已越来越高,而智能化在汽车相关产业上的应用最典型的例子就是汽车电子行业,
汽车的电子化程度则被看作是衡量现代汽车水平的重要标志。同时,汽车生产商推出越来越智能的汽车,来满足各种各样的市场需求。本文以第六届全国大学生智能车竞赛为背景,主要介绍了智能车控制系统的机械及硬软件结构和开发流程。 机械硬件方面,采用组委会规定的标准 A 车模,以飞思卡尔半导体公司生产的80管脚16 位单片机MC9S12XS128MAA 为控制核心,其他功能模块进行辅助,包括:摄像头数据采集模块、电源管理模块、电机驱动模块、测速模块以及无线调试模块等,来完成智能车的硬件设计。 软件方面,我们在CodeWarrior IDE 开发环境中进行系统编程,使用增量式PD 算法控制舵机,使用位置式PID 算法控制电机,从而达到控制小车自主行驶的目的。 另外文章对滤波去噪算法,黑线提取算法,起止线识别等也进行了介绍。 关键字:智能车摄像头图像处理简单算法闭环控制无线调试 第一章引言 飞思卡尔公司作为全球最大的汽车电子半导体供应商,一直致力于为汽车电子系统提供全范围应用的单片机、模拟器件和传感器等器件产品和解决方案。飞思卡尔公司在汽车电子的半导体器件市场拥有领先的地位并不断赢得客户的
飞思卡尔单片机优点
常有人问freescale的单片机有什么优点,今天转篇别人写的文章来,可以部分回答这些朋友的问题,但需要说明的是下面这篇文章主要是针对S08,S12这类单片机说的,飞思卡尔处理器远非只是单片机。飞思卡尔(freescale)半导体公司,就是原来的Motorola公司半导体产品部。于2004年从Motorola分离出来,更名为freescale!freescale系列单片机采用哈佛结构和流水线指令结构,在许多领域内都表现出低成本,高性能的的特点,它的体系结构为产品的开发节省了大量时间。此外freescale提供了多种集成模块和总线接口,可以在不同的系统中更灵活的发挥作用!所有单片机都具有的功能我就不多说了,freescale单片机的特有的特点如下: (1)全系列: 从低端到高端,从8位到32位全系列应有尽有,最近还新推出8位/32位管脚兼容的QE128,可以从8位直接移植到32位,弥补单片机业界8/32 位兼容架构中缺失的一环! (2)多种系统时钟模块:三种模块,七种工作模式 多种时钟源输入选项,不同的mcu具有不同的时钟产生机制,可以是RC振荡器,外部时钟或晶振,也可以是内部时钟,多数CPU同时具有上述三种模块!可以运行在FEI,FEE,FBI,FBILP,FBE,FBELP,STOP这七种工作模式! (3)多种通讯模块接口: 与其它系列的单片机不同,freescale单片机几乎在内部集成各种通信接口模块:包括串行通信接口模块SCI,多主I2C总线模块,串行外围接口模块SPI,MSCAN08控制器模块,通用串行总线模块(USB/PS2)! (4)具有更多的可选模块:某些MCU具有LCD驱动模块,某些MCU带有温度传感器,某些MCU具有超高频发送模块,部分MCu含有同步处理器模块,某写含有同步处理器的MCU 还具有屏幕显示模块OSD,还有少数的MCU具有响铃检测模块RING和双音多频/音调发生器DMG模块! (5)可靠性高,抗干扰性强 (6)低功耗 也许freescale系列的单片机的功耗没有msp430的低,但是他具有全静态的“等待”和“停止”两种模式,从总体上降低您的功耗!新近推出的几款超低功耗已经与msp430的不相上下! (7)多种引脚数和封装选择 可以说freescale系列单片机具有的MCU种类是最多的了,有些MCU本身就有几种不同的引脚数和封装形式,这样用户各异根据需要来选择,总有一款适合你的开发的单片机! 有关于部分人的freescale单片机模块寄存器多,配置困难不容易上手,可以说freescale单片机模块寄存器的确相对多,就拿GPIO来说就有端口数据寄存器、端口数据方向寄存器、端口内部上拉使能寄存器、端口转换率使能寄存器和端口驱动强度选择寄存器5个寄存器,它的寄存器多是为了解决客户对IO端口的高要求和高可靠性要求,如果不考虑这些,您就只需要配置端口数据寄存器、端口数据方向寄存器这两个寄存器,这就和其他的单片机如430和pic 的难易度一样了! 独有的BDM仿真开发方式和单一引脚用于模态选择和背景通信,HCS08 的开发支持系统包括了背景调试控制器(BDC)和片内调试模块(DBG),BDC提供了一个至目标MCU 的单线调试接口,也就是提供了一个便于在片内FLASH 或其它固定存储器编程的接口.
飞思卡尔mc9s12d64芯片奏乐
//作者:徐成 //单位:湖北汽车工业学院科技学院 //时间:2013-7-25 //芯片:飞思卡尔mc9s12d64 //功能:让蜂鸣器作《生日快乐》 #include
DM9000中文数据手册
dm9000 1、总体介绍 该DM9000是一款完全集成的和符合成本效益单芯片快速以太网MAC控制器与一般处理接口,一个10/100M自适应的PHY和4K DWORD值的SRAM 。它的目的是在低功耗和高性能进程的3.3V与5V的支持宽容。 DM9000还提供了介质无关的接口,来连接所有提供支持介质无关接口功能的家用电话线网络设备或其他收发器。该DM9000支持8位,16位和32 -位接口访问内部存储器,以支持不同的处理器。DM9000物理协议层接口完全支持使用10MBps 下3类、4类、5类非屏蔽双绞线和100MBps下5类非屏蔽双绞线。这是完全符合I EEE 802.3u规格。它的自动协调功能将自动完成配置以最大限度地适合其线路带宽。还支持IEEE 802.3x全双工流量控制。这个工作里面DM9000是非常简单的,所以用户可以容易的移植任何系统下的端口驱动程序。 2、特点 支持处理器读写内部存储器的数据操作命令以字节/ 字/ 双字的长度进行 集成10/100M自适应收发器 支持介质无关接口 支持背压模式半双工流量控制模式 IEEE802.3x流量控制的全双工模式 支持唤醒帧,链路状态改变和远程的唤醒 4K双字SRAM 支持自动加载EEPROM里面生产商ID和产品ID 支持4个通用输入输出口 超低功耗模式 功率降低模式 电源故障模式 可选择1:1 YL18-2050S,YT37-1107S 或5:4变压比例的变压器降低格外功率 兼容3.3v和5.0v输入输出电压 100脚CMOS LQFP封装工艺 3、引脚描述 I=输入O=输出I/O=输入/输出O/D=漏极开路P=电源LI=复位锁存输入#= 普遍低电位
飞思卡尔智能车设计报告
飞思卡尔智能车设计报告
目录 1.摘要 (3) 2.关键字 (3) 3.系统整体功能模块 (3) 4.电源模块设计 (4) 5.驱动电路设计 (4) 6.干簧管设计 (5) 7.传感器模块设计 (6) 8.传感器布局 (6) 9.软件设计 (7) 9.1控制算法 (7) 9.2软件系统实现(流程图) (10) 10.总结 (11) 11.参考文献 (12)
1.摘要 “飞思卡尔”杯全国大学生智能汽车竞赛是由教育部高等自动化专业教学指导分委员会主办的一项以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。该竞赛以汽车电子为背景,涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科的科技创意性比赛。 本文介绍了飞思卡尔电磁组智能车系统。本智能车系统是以飞思卡尔32 位单片机K60为核心,用电感检测赛道导线激发的电磁信号, AD 采样获得当前传感器在赛道上的位置信息,通过控制舵机来改变车的转向,用增量式PID进行电机控制,用编码器来检测小车的速度,共同完成智能车的控制。 2.关键字 电磁、k60、AD、PID、电机、舵机 3.系统整体功能模块 系统整体功能结构图
4.电源模块设计 电源是一个系统正常工作的基础,电源模块为系统其他各个模块提供所需要的能源保证,因此电源模块的设计至关重要。模型车系统中接受供电的部分包括:传感器模块、单片机模块、电机驱动模块、伺服电机模块等。设计中,除了需要考虑电压范围和电流容量等基本参数外,还要在电源转换效率、噪声、干扰和电路简单等方面进行优化。可靠的电源方案是整个硬件电路稳定可靠运行的基础。 全部硬件电路的电源由7.2V,2A/h的可充电镍镉电池提供。由于电路中的不同电路模块所需要的工作电流容量各不相同,因此电源模块应该包含多个稳压电路,将充电电池电压转换成各个模块所需要的电压。 电源模块由若干相互独立的稳压电源电路组成。在本系统中,除了电机驱动模块的电源是直接取自电池外,其余各模块的工作电压都需要经电源管理芯片来实现。 由于智能车使用7.2V镍镉电池供电,在小车行进过程中电池电压会有所下降,故使用低压差电源管理芯片LM2940。LM2940是一款低压稳压芯片,能提供5V的固定电压输出。LM2940低压差稳压芯片克服了早期稳压芯片的缺点。与其它的稳压芯片一样,LM2940需要外接一个输出电容来保持输出的稳定性。出于稳定性考虑,需要在稳压输出端和地之间接一个47uF低等效电阻的电容器。 舵机的工作电压是6伏,采用的是LM7806。 K60单片机和5110液晶显示器需要3.3伏供电,采用的是LM1117。 5.驱动电路设计 驱动电路采用英飞凌的BTS7960,通态电阻只有16mΩ,驱动电流可达43A,具有过压、过流、过温保护功能,输入PWM频率可达到25KHz,电源电压5.5V--27.5V。BTS7960是半桥驱动,实际使用中要求电机可以正反转,故使用两片接成全桥驱动。如图下图所示。
飞思卡尔智能车简介
智能车制作 F R E E S C A L E 学院:信息工程学院 班级:电气工程及其自动化132 学号:6101113078 姓名:李瑞欣 目录: 1. 整体概述 2.单片机介绍 3.C语言 4.智能车队的三个组 5.我对这门课的建议
一、整体概述 智能车的制作过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作。内容涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科多专业。 下面是一个智能车的模块分布: 总的来说智能车有六大模块:信号输入模块、控制输出模块、数据处理模块、信息显示模块、信息发送模块、异常处理模块。 1、信号输入模块: 智能车通过传感器获知赛道上的路况信息(直道,弯道,山坡,障碍物等),同时也通过传感器获取智能车自身的信息(车速,电磁电量等)。这些数据构成了智能车软件系统(大脑)的信息来源,软件系统依靠这些数据,改变智能车的运行状态,保证其在最短的时间内按照规定跑完整个赛道。 2、控制输出模块: 智能车在赛道上依靠转向机构(舵机)和动力机构(电机)来控制运行状态,这也是智能车最主要的模块,这个模块的好坏直接决定了你的比赛成绩。 电机和舵机都是通过PWM控制的,因此我们的软件系统需要根据已有的信息进行分析计算得到一个合适的输出数据(占空比)来控制电机和舵机。 3数据处理模块: 主要是对电感、编码器、干簧管的数据处理。信号输入模块得到的数据非常原始,有杂波。基本上是不能直接用来计算的。因此需要有信号处理模块对采集的数据进行处理,得到可用的数据。 4信息显示模块: 智能车调试过程中,用显示器来显示智能车的部分信息,判断智能车是否正常运行。正式比赛过程中可关闭。主流的显示器有:Nokia 5110 ,OLED模块等,需要进行驱动移植。