直升机旋翼桨毂结构形式
直升机的旋翼

直升机的旋翼张德和葛吉灵夏小同直升机的分类形式很多,按用途可分为武装直升机、运输直升机、勤务直升机三大类,最显著的标志就是旋翼。
直升机的英文名字Helicopter,意思就是“旋转的翼”。
它与生俱来的而固定翼飞机和其它飞行器所没有的飞行特点,都与旋翼密不可分。
旋翼由桨毂和若干片(最多八片)桨叶组成。
工作时,桨叶与空气作相对运动。
桨叶给空气以向下的作用力,使空气向下加速流动,与此同时,空气就给旋翼一个大小相等、方向相反的反作用力,就是旋翼产生的旋翼拉力。
旋翼拉力提供的升力等于直升机的重力,直升机悬停;升力小于重力,就下降:升力大于重力就上升。
平飞时,要想使直升机沿预定方向运动,必须使旋翼拉力朝预定方向倾斜,以获取向该方向运动的力。
桨毂的变化15世纪,有人便将螺旋型的螺旋桨,作为人类实现垂直飞行的目标。
然而由于直升机旋翼相对机身是以恒定的速度转动,与固定翼相比,旋翼桨叶的工作环境要复杂得多,也就使得直升机旋翼的结构比固定翼飞机机翼复杂。
因此它的成功飞行比固定翼飞机迟了30多年。
在试验中,人们发现旋翼是作圆周运动,由于半径的关系,翼尖处线速度已经接近音速时,圆心处线速度几乎为零,所以旋翼靠近圆周的地方产生的升力最大,靠近圆心的地方则几乎为零。
同时,桨叶向前划行时,桨叶和空气的相对速度高于旋转本身所带来的线速度;反之,桨叶向后划行时,桨叶和空气的相对速度就低于旋转本身所带来的线速度,这样旋翼两侧产生的拉力不同,形成的拉力差会产生一个令直升机翻滚的力矩,我们称它为“倾覆力矩”。
这个力矩会造成直升机向一侧翻滚,无法维持平衡。
倾覆力矩的平衡问题是直升机发展史上首先遇到的技术难题。
是西班牙人首先攻克了这个难题。
他们在桨叶的翼根部增加了一个允许桨叶在回转过程中上下挥舞的铰链,它只传力不传力矩,这个铰链称为挥舞铰(flapping hinge,也称垂直铰)。
桨叶在旋转过程中,以铰链中心为轴上下挥舞,达到平衡倾覆力矩的作用。
《直升机设计》课程设计

《直升机设计》课程设计姓名:齐伟学号:1101433070一、题目直升机旋翼桨毂(跷跷板式)设计二、任务1.选定桨毂结构型式,进行结构布置(主要是轴向铰)。
2.桨毂外载荷计算。
3.绘制桨毂装配工作图和零件(选1~2个主要零件)工作图。
4.零件强度计算。
5.编写桨毂设计说明书。
三、原始数据旋翼直径D 5.8m旋翼转速n 491rpm桨尖速度ΩR 150m/s桨叶弦长b 0.2m全机重量G 280kg桨叶重量m8.6kgb桨盘载荷102.41N/㎡桨叶实度0.0443旋翼旋转方向右旋(俯视)旋翼输入功率N 55H P四、桨毂结构参数桨毂预锥角δ 2.5°桨毂悬挂高度64mm挥舞调节系数0下限动角δ9°30′五、设计要求桨毂结构要合理,安全可靠,在满足强度要求的情况下,要尽量减轻桨毂的重量。
六、设计参数的计算与确定1、桨毂预锥角δ旋停状态下⎰Ω===Rl b e rdr R M N k Mg T tg N T 2)/(,/,δ δ=2.47º在水平飞行下,拉力大于旋停状态,所以预锥角取大。
取δ=2.5º2、当量挥舞铰外伸量e l假定12βΩ=1.1242Ω,当用铰接式旋翼代替,其挥舞一阶固有频率一致。
12βΩ=(1+e l e S /e I )2Ω , e I =⎰R l b e dr r R M 2)/( e S =⎰Rl b e rdr R M )/( 求得e l =0.433m3、桨毂悬挂高度h在预锥角δ=2.5º时,桨叶重心高h=Rsin2.5º/2=63.2mm在水平飞行状态,桨叶的锥度角变大,所以h 取大取h=64mm七、桨毂外载荷计算桨毂承受由桨叶传来的各种载荷(挥舞面的载荷、旋转面的载荷、铰链力矩)。
在直升机各种工作状态,载荷情况各不相同。
根据直升机强度规范,选用直升机在使用中会发生的并决定结构元件或整机最严重的工作状态的载荷作为桨毂静强度计算的载荷。
直升机旋翼结构
直升机旋翼结构直升机的飞行原理1. 概况与普通飞机相比,直升机不仅在外形上,而且在飞行原理上都有所不同。
一般来讲它没有固定的机翼和尾翼,主要靠旋翼来产生气动力。
这里所说的气动力既包括使机体悬停和举升的升力,也包括使机体向前后左右各个方向运动的驱动力。
直升机旋翼的桨叶剖面由翼型构成,叶片平面形状细长,相当于一个大展弦比的梯形机翼,当它以一定迎角和速度相对于空气运动时,就产生了气动力。
桨叶片的数量随着直升机的起飞重量而有所不同。
重型直升机的起飞重量在20t以上,桨叶的数目通常为六片左右;而轻、小型直升机,起飞重量在1.5t以下,一般只有两片桨叶。
直升机飞行的特点是:(1) 它能垂直起降,对起降场地要求较低;(2) 能够在空中悬停。
即使直升机的发动机空中停车时,驾驶员可通过操纵旋翼使其自转,仍可产生一定升力,减缓下降趋势;(3) 可以沿任意方向飞行,但飞行速度较低,航程相对来说也较短。
2. 直升机旋翼的工作原理直升机旋翼绕旋翼转轴旋转时,每个叶片的工作类同于一个机翼。
旋翼的截面形状是一个翼型,如图2.5.1所示。
翼型弦线与垂直于桨毂旋转轴平面(称为桨毂 旋转平面)之间的夹角称为桨叶的安装角,以ϕ表示,有时简称安装角或桨距。
各片桨叶的桨距的平均值称为旋翼的总距。
驾驶员通过直升机的操纵系统可以改变旋翼的总距和各片桨叶的桨距,根据不同的飞行状态,总距的变化范围约为2º~14º。
气流V 与翼弦之间的夹角即为该剖面的迎角α。
显然,沿半径方向每段叶片上产生的空气动力在桨轴方向上的分量将提供悬停时需要的升力;在旋转平面上的分量产生的阻力将由发动机所提供的功率来克服。
旋翼旋转时将产生一个反作用力矩,使直升机机身向旋翼旋转的反方向旋转。
前面提到过,为了克服飞行力矩,产生了多种不同的结构形式,如单桨式、共轴式、横列式、纵列式、多桨式等。
对于最常见的单桨式,需要靠尾桨旋转产生的拉力来平衡反作用力矩,维持机头的方向。
【直升机资料】直升机系统-2

典型的铰接式桨毂(Y-2)
典型的铰接式桨毂(直-五)
典型的铰接式桨毂(直-五)
典型的铰接式桨毂(直-五)
典型的铰接式桨毂(直-五)
典型的铰接式桨毂( S-58 )
典型的铰接式桨毂(云雀III)
典型的铰接式桨毂(拉扭杆)
典型的铰接式桨毂(拉扭杆)
典型的铰接式桨毂(拉扭杆)
铰接式旋翼其桨叶在挥舞、摆振 方向根部是铰支的,扭转(变距)则 属于根部铰支而又带弹性约束(操纵 系统约束)。
R 0
myi2 d r
振型 1)应满足微分方程 2)边界条件 铰接式:
y(0) 0 y"(0) 0 y"(R) 0
无铰式(无轴承式) :
y(0) 0 y'(0) 0
y"(R) 0
3)特点: 铰接式: (1y)0 (r0)阶振r 型—是—一刚条体直挥线舞 (2)振型随转速是变化的
铰接式旋翼模态弯矩
第二章 旋翼系统
一、旋翼构造型式
旋翼型式是指旋翼桨叶与旋翼轴的连 接方式,也就是旋翼桨毂的结构型式,不 同的旋翼型式其动力学特性及设计特点有 明显的差别。
1. 铰接式旋翼
桨叶通过桨毂上的挥舞铰(水平铰 )、摆振铰(垂直铰)及变距铰(轴向 铰)与旋翼轴相连,通过三个铰实现桨 叶的挥舞、摆振和变距运动。这些铰有 不同的排列方式,一般都采用金属滚动 轴承实现构件之间的相对运动。
EC135无轴承旋翼
二、旋翼主要动力学问题
2.1 旋翼动力学特性 ●旋翼的动力学特性主要指旋翼
桨叶模态特性,即固有振型以及对应的 固有频率,它是研究旋翼动力学问题的 基础和出发点,对直升机的动力学问题 往往起着重要的以至决定性的作用,甚 至对直升机的飞行品质也有重要影响。
直升机

模型基础知识-原理与结构-模型直升机结构与飞行控制关于“直升机玩具飞...”的内容本站搜索更多关于“直升机玩具飞行原理”的内容四、模型直升机结构与飞行控制(一)模型直升机主旋翼结构通常只有两个主旋翼叶片,油动和电动模型直升机的旋翼桨毂结构不同,因为电动直升机比较容易控制主轴的转速,而油动内燃机的转速必须在一定范围内才能发挥最大的效率,并且要和一定的螺距相匹配,因此都采用变桨距主旋翼,而电动直升机相当一部分采用不变桨距的主旋翼。
1、可变桨距主旋翼结构可变桨距主旋翼结构的直升机可以做出真飞机都难以做出的出色动作,如倒飞,大幅度急转换向等。
模型直升机的桨距变化都是通过倾斜圆盘直接或者间接控制的,而倾斜圆盘又是通过舵机驱动倾斜的。
为了使直升机飞行稳定,多数模型直升机都使用了带平衡翼的平衡杆,又称为挥舞桨。
模型直升机倾斜圆盘的控制又分为普通模式和CCPM模式。
普通模式是一种传统的倾斜圆盘控制模式,它采用多个舵机串联工作,两个舵机控制倾斜圆盘的前后左右倾斜来控制周期变距,一个舵机控制总桨距,因此它的倾斜圆盘的外盘的球铰为90度间隔排列的有四个(正上方看呈十字形),也成为十字盘,如图所示。
十字盘是控制直升机运动方向的关键元件,因此十字盘的稳定性,大大影响了整个机身的操控准确度。
下载(40.08 KB)2010-1-31 15:40近年,JR 发表了CCPM ( Cylic Collective Pitch Mixing ) 新型的十字盘控制结构,其他业者也相继推出相同设计原理的机种,如Kyosho 的EMS、Hirobo 的SWM。
这新设计关键在於倾斜圆盘驱动方式的差异,CCPM是用三个舵机同时并联工作来完成一系列的十字盘动作,CCPM的十字盘是呈120度排列的有三个(正上方看呈三角形),利用三个舵机连接三个头球,同时工作使十字盘进行前后、左右、上下的动作。
因为CCPM是同时使用三个舵机工作,理论上来说,倾斜圆盘受到的控制力度比传统的要大三倍(传统十字盘进行某单一方向控制时,只有一个舵机工作)。
图解直升机(中英双语)
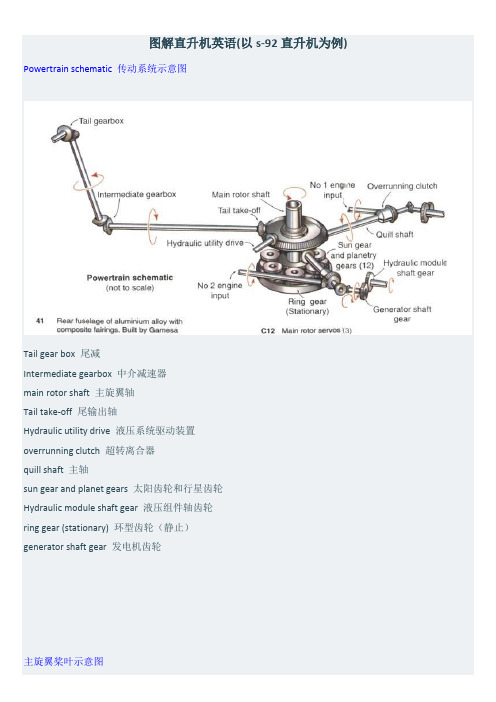
图解直升机英语(以s-92直升机为例) Powertrain schematic 传动系统示意图Tail gear box 尾减Intermediate gearbox 中介减速器main rotor shaft 主旋翼轴Tail take-off 尾输出轴Hydraulic utility drive 液压系统驱动装置overrunning clutch 超转离合器quill shaft 主轴sun gear and planet gears 太阳齿轮和行星齿轮Hydraulic module shaft gear 液压组件轴齿轮ring gear (stationary) 环型齿轮(静止)generator shaft gear 发电机齿轮主旋翼桨叶示意图Leading edge counter weight 前缘配重De-ice element 防冰组件Titanium/nickel leading edge erosion protection 钛/镍前缘摩擦保护Leading edge sheath 前缘蒙皮Lower fibreglass skin 下部玻璃纤维蒙皮Upper fibreglass skin 上部玻璃纤维蒙皮Honeycomb core 蜂窝材料Titanium edge stiffener 钛后缘加强件Graphite/fibreglass spar 石墨/玻璃纤维大梁Instrument panel,central pedestal and side consoles仪表板,中央和侧面控制台A Standby compass 备用罗盘B Backup instruments 备用仪表C Master warning panel 主警告面板D Collins multi function displays (4) with central optional display 多功能显示器E Cargo hook release 货钩释放F Pilot flight director mode select 驾驶员飞行指示器方式选择G Copilot flight director mode select 副驾驶飞行指示器方式选择H Digital clock 数字时钟I Compess unit 罗盘组件J Audio controller 音频控制器K FDR/CVR controller 数据记录/话音记录控制器L HUMS 使用状态监控系统M Pass brief control panel ?N FMS data loader 飞行管理数据输入器O Weather radar controller 气象雷达控制器P Radio tuning unit 无线电调谐器Q Display controller 显示控制器R FMS/GPS CDU 飞行管理/全球定位系统控制显示组件S AFCS (FCG) contro1 panel 自动飞行控制系统控制面板T Backup control panel 控制面板备用U Reversionary control 保留控制V Remote instrument control 远距离仪表控制W Deployable emergency beacon 释放式紧急信标X Misc switch panel 其他配电盘Y Landing gear contro1s 起落架控制Z Parking brake 停机刹车Fuel cell and installed system 油箱及安装的系统F1 Sponson fuel cells(2) with 35OUS gallon useab1e fuel in each cell浮筒油箱F2 Rubber bladder tank 气囊箱F3 Tank high level sensor 高油面传感器F4 Vent valves 通气阀门F5 Fuel quantity probes 油量传感器F6 Fuel low level sensors 低油面传感器F7 Low level shut-off valve 低油面关断阀门F8 Engine fuel feed check valve 发动机供油单向阀门F9 Fuel sump drain valve 燃油箱放油阀门F10 Tank vent lines 油箱通气管F11 Access cover to fuel cell 油箱蒙皮盖板F12 Gravity retueling point- typical both sponsons (pressure refuel Point on port sponson) 重力加油口-典型布置两侧都有,压力加油在左侧。
直升机旋翼桨毂结构形式

直升机旋翼桨毂(含主桨尾桨)结构形式1. 简介尾桨是用来平衡反扭矩和对直升机进行航向操纵的部件。
旋转着的尾桨相当于一个垂直安定面,能对直升机航向起稳定作用。
虽然后桨的功用与旋翼不同,但是它们都是由旋转而产生空气动力、在前飞时处于不对称气流中工作的状态,因此尾桨结构与旋翼结构有很多相似之处。
尾桨的结构形式有跷跷板式、万向接头式、铰接式、无轴承式、“涵道尾桨” 式等等。
前面几种形式与旋翼形式中的讨论相似,只是铰接式尾桨一般不设置摆振铰。
70 年代以来,又发展了无轴承尾桨(包括采用交叉式布置无轴承尾桨)及“涵道尾桨”。
“涵道尾桨”是把尾桨置于机身尾斜梁的“涵道”之中。
涵道风扇直径小,叶片数目多。
前飞时尾面可以提供拉力,因此,可以减小尾桨的需用功率。
但在悬停时“涵道风功率消耗偏大,对直升机悬停和垂直飞行性能不利。
可以避免地面人员或机外物体与尾桨相碰撞,安全性好。
1.1. 名词解释(参考图2.2-1)1)水平铰(挥舞铰)的作用:发动机丁作时,旋翼便以一定的转速转动。
在飞行过程中(如前飞),由于飞行速度的存在,使得旋翼前行桨叶的相对气流速度大于后行桨叶的相对气流速度,从而使前行桨叶产生的升力大于后行桨叶产生的升力。
若没有水平铰,则由两侧桨叶升力大小不等所构成的滚转力矩,将使直升机倾斜。
有水平铰时,情况则不同。
前行桨叶升力大,便绕水平铰向上挥舞;后行桨叶升力小,便绕水平铰向下挥舞。
这样,横侧不平衡的滚转力矩就不会传到机身,从而避免了直升机在前飞中产生倾斜。
2)垂直铰(摆振或摆振铰)的作用:直升机前飞时,桨叶在绕旋翼轴转动的同时还要绕水平铰挥舞。
桨叶作挥舞运动时,桨叶重心距旋翼轴的距离不断变化。
由理论力学得知,旋转着的质量对旋转轴沿径向有相对运动时,会受到科氏力的作用。
而挥舞运动引起的科氏力是周期交变力。
有关直升机空气动力的资料表明,一片桨叶的科氏力的最大幅值可以高达桨叶自重的7 倍以上。
这样大的科氏力会在旋转平面内造成很大的交变弯矩,在没有垂直铰的条件下,容易使桨叶根部因材料疲劳而提前损坏;传到机身,还会引起机身振动加剧。
直升机桨毂结构

直升机桨毂结构直升机结构(桨毂)旋翼系统由桨叶和桨毂组成。
旋翼形式是由桨毅形式决定的。
它随着材料、工艺和旋翼理论的发展而发展。
到目前为止,已在实践中应用的旋翼形式有铰接式、跷跷板式、无铰式和无轴承式,它们各自的原理如下表所示。
一、桨毂结构特点(一)铰接式铰接式(又称全铰接式)旋翼桨毂是通过桨毂上设置挥舞铰、摆振铰和变距铰来实现桨叶的挥舞、摆振和变距运动。
典型的铰接式桨毂铰的布置顺序(从里向外)是由挥舞铰、摆振铰到变距铰,如图2(2—1所示。
也有挥舞铰与摆振铰重合的。
在轴向铰中除了用推力轴承来负担离心力并实现变距运动外,另一种流行的方式是利用弹性元件拉扭杆来执行这个功能,如图2(2—2所示。
这样在旋翼进行变距操纵时必须克服拉扭杆的弹性及扭短,为了减小操纵力,就必须使拉扭杆有足够低的扭转刚度。
铰接式桨毂构造复杂,维护检修的工作量大,疲劳寿命低。
因此在直升机的发展中一直在努力改善这种情况。
在20世纪60年代后期开始发展的层压弹性体轴承(橡胶轴承)也是解决这个问题的一个较好的方案,现已实际应用。
层压弹性体轴承也可称为核胶轴承,以图2(2—3b中径向轴承为例,这是由每两层薄橡胶层中间由金属片隔开并硫化在一起。
图2(2—4为桨毂一个支管的构造。
轴承组件的主要部分是一个球面弹性体轴承,桨叶的挥舞及摆振运动全部通过这个轴承来实现。
此外靠近内端有一个层压推力铀承,桨叶变距运动的85,通过这个轴承的扭转变形来实现,其余15,则由球面轴承来实现。
这种形式的桨毂是用一组层压弹性体轴承组件来实现挥舞铰、摆振铰、变距铰三铰的功能,这样使构造大大简化,零件数量也大大减少。
同时由于不需要润滑及密封,维护检修的工作量亦少很多。
(二)桨毂减摆器铰接式旋翼在摆振铰上都带有桨毂减摆器,简称为减摆器,为桨叶绕摆振铰的摆振运动提供阻尼。
减摆器对于防止出现“地面共振”,保证其有足够的稳定性裕度是必要的。
此外,对于装备涡轮轴发动机的直升机,发动机、传动系统及旋翼整个系统的扭转振动,由于存在着燃油控制系统而形成一个闭合回路,也存在着操纵响应的稳定性问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直升机旋翼桨毂(含主桨尾桨)结构形式
1.简介
尾桨是用来平衡反扭矩和对直升机进行航向操纵的部件。
旋转着的尾桨相当于一个垂直安定面,能对直升机航向起稳定作用。
虽然后桨的功用与旋翼不同,但是它们都是由旋转而产生空气动力、在前飞时处于不对称气流中工作的状态,因此尾桨结构与旋翼结构有很多相似之处。
尾桨的结构形式有跷跷板式、万向接头式、铰接式、无轴承式、“涵道尾桨”式等等。
前面几种形式与旋翼形式中的讨论相似,只是铰接式尾桨一般不设置摆振铰。
70年代以来,又发展了无轴承尾桨(包括采用交叉式布置无轴承尾桨)及“涵道尾桨”。
“涵道尾桨”是把尾桨置于机身尾斜梁的“涵道”之中。
涵道风扇直径小,叶片数目多。
前飞时尾面可以提供拉力,因此,可以减小尾桨的需用功率。
但在悬停时“涵道风功率消耗偏大,对直升机悬停和垂直飞行性能不利。
可以避免地面人员或机外物体与尾桨相碰撞,安全性好。
1.1. 名词解释(参考图
2.2-1)
1)水平铰(挥舞铰)的作用:发动机丁作时,旋翼便以一定的转速转动。
在飞
行过程中(如前飞),由于飞行速度的存在,使得旋翼前行桨叶的相对气流速度大于后行桨叶的相对气流速度,从而使前行桨叶产生的升力大于后行桨叶产生的升力。
若没有水平铰,则由两侧桨叶升力大小不等所构成的滚转力矩,将使直升机倾斜。
有水平铰时,情况则不同。
前行桨叶升力大,便绕水平铰向上挥舞;后行桨叶升力小,便绕水平铰向下挥舞。
这样,横侧不平衡的滚转力矩就不会传到机身,从而避免了直升机在前飞中产生倾斜。
2)垂直铰(摆振或摆振铰)的作用:直升机前飞时,桨叶在绕旋翼轴转动的同
时还要绕水平铰挥舞。
桨叶作挥舞运动时,桨叶重心距旋翼轴的距离不断变化。
由理论力学得知,旋转着的质量对旋转轴沿径向有相对运动时,会受到
科氏力的作用。
而挥舞运动引起的科氏力是周期交变力。
有关直升机空气动力的资料表明,一片桨叶的科氏力的最大幅值可以高达桨叶自重的7倍以上。
这样大的科氏力会在旋转平面内造成很大的交变弯矩,在没有垂直铰的条件下,容易使桨叶根部因材料疲劳而提前损坏;传到机身,还会引起机身振动加剧。
有垂直铰时,就可以使桨叶绕垂直铰前后摆动一个角度,从而使桨叶根部承受的沿旋转方向的交变弯矩大为减小。
3)轴向铰的作用:通过操纵机构,可以使桨叶绕轴向铰偏转,以改变桨叶角(或
称桨距角)的大小,从而改变桨叶的拉力。
桨叶角增大,拉力增大;反之桨叶角减小,则拉力减小。
1.2. 运动形式(参考图2.2-1)
1)水平铰,允许桨叶上下运动,这种运动被称为挥舞,是设计用于补偿升力的
不对称性,挥舞铰可以位于螺旋桨旋翼不同距离的位置上,并且可能有不止一个铰链。
2)垂直铰,允许桨叶前后运动,这种运动被称为摆振。
阻尼器通常用于防止绕
摆振铰前后超过限制。
摆振铰和阻尼器的作用是补偿因科里奥利效应造成的加速和减速运动。
3)轴向铰,每片桨叶也都能变距,即绕桨叶展向轴旋转。
桨叶变距意味着桨叶
角的改变。
通过改变桨叶的桨叶角,可以控制主旋翼桨盘的拉力和方向。
2.铰接式
铰接式 (又称全铰接式 )旋翼桨毂是通过桨毂上设置挥舞铰、摆振铰和变距铰来实现桨叶的挥舞、摆振和变距运动。
典型的铰接式桨毂铰的布置顺序 (从里向外 )是由挥舞铰、摆振铰到变距铰,如图 2.2—1 所示。
也有挥舞铰与摆振铰重合的。
在轴向铰中除了用推力轴承来负担离心力并实现变距运动外,另一种流行的方式是利用弹性元件拉扭杆来执行这个功能,如图 2.2—2 所示。
这样在旋翼进行变距操纵时必须克服拉扭杆的弹性及扭短,为了减小操纵力,就必须使拉扭杆有足够低的扭转刚度。
图2.2-1
2.1. 优点
1)无
2.2. 缺点
1)铰接式构造复杂,维护检修工作量大,疲劳寿命低。
2)操纵功效及角速度阻尼小。
3.万象接头式
图 2.2—8 所示为 Bell47 型直升机万向接头式旋翼桨毂的构造,图 22-9 为其原理图。
两片桨叶通过各自的轴向铰和桨毂壳体互相连接,而桨毂壳体又通过万向接头与旋翼轴相连,分别通过万向节上不同的轴实现变距和挥舞运动;挥舞运动通过万向接头 B-B 铰实现,改变总距是通过轴向铰实现的,而周期变距是通过万向接头绕a-a 铰的转动实现。
3.1.优点
1)桨毂构造简单,去掉了摆振铰、减摆器。
3.2.缺点
1)铰接式构造复杂,维护检修工作量大,疲劳寿命低。
2)操纵功效及角速度阻尼小。
4.跷跷板式
跷跷板式旋翼由万向接头式旋翼发展
而来,跷跷板式旋翼有一个共用的中心水平
(挥舞)铰,没有垂直铰,而有轴向铰(或当
量变距铰),这种形式的尾桨既有铰接式的
特点,又有无铰式的特点。
跷跷板尾桨一般
没有结构锥度角,这是由子使拉力与离心力
平衡所需的结构锥度角很小,而且要兼顾带
功率状态和悬停状态力方向相反的鉴本特性所决定。
同时,往往挥舞铰与轴向铰不垂直布置,这样可以避免变距铰轴承每转1次的周期变距运动,减少磨损,提高寿命。
对于高性能的轻型直升机还可采用双跷跷板式尾桨,交错叠装在尾桨轴上的两套跷跷板式尾桨,可以提高尾桨推力(拉力),并适当减小桨尖速度和降低噪声水平。
4.1.优点
1)桨毂构造简单,桨毂壳体只通过一个挥舞铰与旋翼轴相连。
2)去绰了摆振铰、减摆器,两片桨叶共同的挥舞铰不负担离心力而只传递拉力
及旋翼力矩,轴承负荷比较小,没有“地面共振”问题。
3)两片桨叶的离心力在桨毂轴套上相平衡,不传给挥舞铰,从而大大减轻了挥
舞铰轴承的负担,可以选用较小的轴承。
4)并且尾桨桨毂构造简单、紧凑、重量轻,通常用于轻型直升机的尾桨设计。
4.2.缺点
1)但是,这种旋翼操纵功效和角速度阻尼比较小,为了加大角速度阻尼,这种
形式的旋翼都要带机械增稳装置——稳定杆,没有办法改善操纵功效,对于机动性要求较高的直升机,上述缺点就很突出。
5. 无铰式
从 40 年代到 60 年代,铰接式旋翼是主要的旋翼形式。
在长期的应用中这种形式发展得比较成熟,经验也比较多。
但是,由于结构复杂、维护工作量大、操纵功效及角速度阻尼小等固有的缺点,这种形式不够理想。
因此,从 50 年代起,除了简化铰接式旋冀结构外,还开始了无铰式旋翼的研究工作。
经过长期的理论与试验研究,印年代末及 70 年代初无铰式旋翼进入了实用阶段。
带有无
铰式旋翼的宜升机如德国的 BO—105 ,英国的“山猫”(WG—13)等,它们取得了成功并投入了批生产。
与铰接式旋冀相比,无铰式旋翼的结构的力学特性与飞行的力学特性联系更为密切。
5.1.优点
1)尺寸比较紧凑,刚度也很大
2)变距铰在桨叶根部与桨毂相连,桨叶挥舞和摆振运动是通过玻璃钢桨叶根部
的弯曲变形来实现的。
5.2.缺点
1)会产生一些新的动力稳定性问题。
6. 无轴承式
不论是半铰接式尾桨还是“跷跷板”式尾
桨,都仍然带有挥舞铰、变距铰,致使结构重
量难以减轻,而且维护工作量大、寿命低。
同
旋翼一样,合乎逻辑的发展就是取消这些铰,
使结构简化,以提高尾桨使用的可靠性和寿命。
因此,作为发展无轴承旋翼的先导,在20
世纪70年代初出现了无轴承式尾桨,无轴承
式尾桨采用全复合材料结构,取消了挥舞铰和
变距铰,桨叶的变距运动由复合材料大梁扭转
变形来实现。
右图为S-76的无轴承尾桨。
它
由四片复合材料桨叶组成,采用交叉梁结构,
相对的两片桨叶大梁是一个整体,两个大梁交
叉叠置,用夹板夹持在一起;桨叶大梁是石墨复合材料,离心力在大梁中自身得到平衡,没有单独的桨毂,结构非常简单,与一般传统的尾桨相比,结构零件减少大约87%,重量减轻约30%。
6.1.特点
结构非常简单,重量轻,无轴承旋翼取消了挥舞铰、摆振铰和变距铰的旋翼,桨叶的挥舞、摆振和变距运动都以桨叶根部的柔性元件来完成。
7.涵道风扇式
直9直升机的“涵道风扇”式尾桨
7.1.优点
1)涵道风扇直径小,叶片数目多。
2)前飞时尾面可以提供拉力,因此,可以减小尾桨的需用功率。
3)可以避免地面人员或机外物体与尾桨相碰撞,安全性好。
7.2.缺点
1)但在悬停时“涵道风”功率消耗偏大,对直升机悬停和垂直飞行性能不利。
2)重量大,结构复杂,维护较烦琐。
8.电动尾桨
无人直升机尾旋翼变螺距独立驱动结构,该无人直升机尾旋翼变螺距独立驱动结构包括尾旋翼独立驱动结构本体和尾旋翼变螺距结构本体;其中,尾旋翼独立驱动结构本体包括:无刷电机、传动轴、三叶尾桨和三个尾旋翼;尾旋翼变螺距结构本体包括:变距滑环、变距拉杆、变距连杆和三个扭力杆。
本实用新型的无人直升机尾旋翼变螺距独立驱动结构可实现主旋翼与尾旋翼之间无需固定传动比传动,且在直升机主旋翼任意转速下,尾旋翼都可以产生足够的力来抵消机身的反扭矩。
改装自Bell 429型直升机
8.1.优点
1) 这种电动尾桨能独立控制,在直升机巡航飞行中可以采用较低的转速,降低油耗。
2) 同时结构上也可取消复杂的轴和齿轮箱的连接结构。
3) 大大提高尾桨的使用效率、直升机的安全性和其他性能。