液压挖掘机主控制阀东芝和KPM

液压挖掘机主控制阀
发表于:2008年3月18日 16时55分34秒阅读(4)评论(0)本文链接:
https://www.360docs.net/doc/7c18015437.html,/479140927/blog/1205830534
液压挖掘机主控制阀
液压挖掘机主控制阀主控制阀也称为主控阀或主阀,它的作用是按操作者的指令将泵排出的压力油提供到各执行元件,使挖掘机完成各种动作。主控阀是个复杂的液压元件,现就几种典型的主控阀加以说明。
1.U28阀
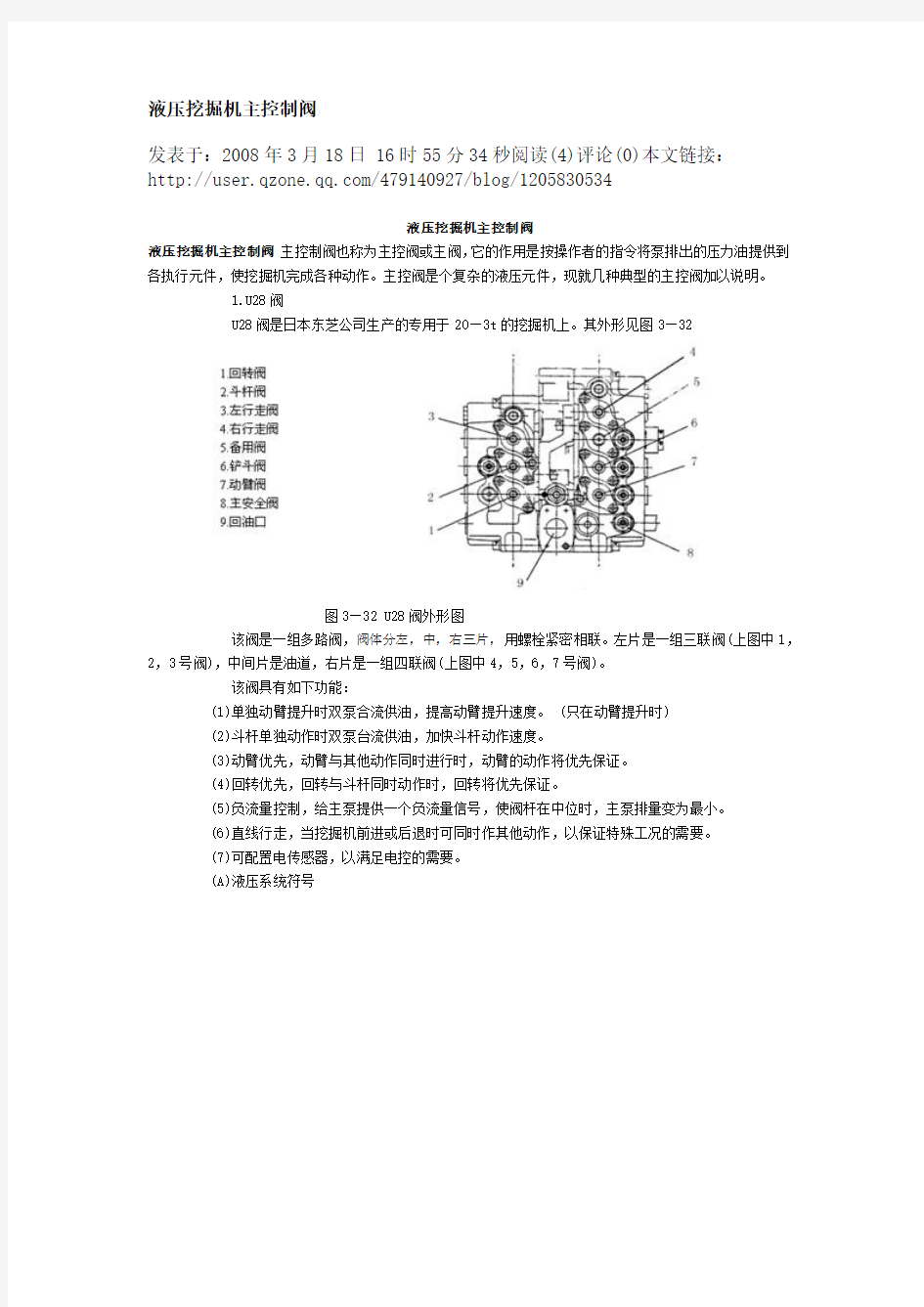
U28阀是日本东芝公司生产的专用于20—3t的挖掘机上。其外形见图3—32
图3—32 U28阀外形图
该阀是一组多路阀,阀体分左,中,右三片,用螺栓紧密相联。左片是一组三联阀(上图中1,2,3号阀),中间片是油道,右片是一组四联阀(上图中4,5,6,7号阀)。
该阀具有如下功能:
(1)单独动臂提升时双泵合流供油,提高动臂提升速度。(只在动臂提升时)
(2)斗杆单独动作时双泵台流供油,加快斗杆动作速度。
(3)动臂优先,动臂与其他动作同时进行时,动臂的动作将优先保证。
(4)回转优先,回转与斗杆同时动作时,回转将优先保证。
(5)负流量控制,给主泵提供一个负流量信号,使阀杆在中位时,主泵排量变为最小。
(6)直线行走,当挖掘机前进或后退时可同时作其他动作,以保证特殊工况的需要。
(7)可配置电传感器,以满足电控的需要。
(A)液压系统符号
图中下面油口中,两个P1分别与两个主泵的出油口相接,是主进油口P2~口P3用油管连接,作为斗杆合流时的辅助进油。
b口与上面b口(左罗辑阀出口)用油管连接。
C口与动臂阀伺服油a1口相连,作为动臂合流的信号。
R口是主回油,接液压油散热器,然后回油箱。
a口与上面a口(右罗辑阀出口)用油管连接。
Py1和Py2与左,右行走操纵阀(脚踏阀)的出油连接,使行走增压。
上面油口fL和fR分别与两个主泵的负流量控制接口相接。
G口作为信号输出可作他用,如接压力传感器等。
当各阀杆在中立位置时(无操作时),左路P1通过三组阀后,推开罗辑阀2,经过负流量阀3进入回油道,从主回油口R回油箱。右路P1通过四组阀后,推开罗辑阀,经过负流量阀进入回油道,从主回油口R回油箱。
此时,两个负流量阀接口fL和fR分别有压力信号输出到主泵的调节器,使主泵排量减小。这是阀杆全部处于中立位置时油的流向。如果阀杆移动将有下面的情况。
1.回转阀(左片下面)移动时,假设a1口进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A1口,油从A1口流出进入回转马达。由回转马达流回的油经B1口从该阀的回油口流入回油道。此时,这一路油被引入执行元件回转马达而使挖掘机回转,上面的两组阀没有油通过,所以,负流量输出口fL没有压力输出,主油泵排量变大。
2.斗杆阀(左片中间一组)移动时,假设a2进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A2口,油从A2口流出进入斗杆油缸大腔。由斗杆油缸小腔流回的油经B2口从该阀的回油口流入回油道。此时,这一路油被斗杆阀切断,上面的一组阀没有油通过(指到罗辑阀处没有油,经节流阀6来的并联油路的油在单向阀4处被断开)。所以,负流量输出口fL没有压力输出,主油泵排量变大。
当该阀杆向右移时,阀杆右端切断了控制油到回油道的通路(虚线,从a口来的油,即从右片阀的罗辑阀出口a经外接管道进入下面a口)。使右片阀的罗辑阀出口a被堵截,右面主泵压力油从罗
辑阀心小孔进到该阀心上部,由于面积差的作用阀心被压住,使右路油不能从罗辑阀回油,强行使右路油经单向阀8进入斗杆阀,实现了左右两路油都进入斗杆阀,即双泵合流。
当伺服油进入b2,推动阀杆向左移时,主泵的油经B2进入斗杆缸小腔,而大腔经A2回油,其他情况相同,仍是双泵合
流。
在A2,B2的油路上装有过载溢流阀,它们的调定压力高于主安全阀,它们的作用是在该阀中位时,由外部的力使该油缸压力过高时此溢流阀泄油以保护油缸。而在油缸吸空时,如斗杆快速下降,斗杆油缸大腔需快速进油,如果双泵合流仍供不上时,油缸将吸空压力变低,此时过载溢流阀从回油路向油缸补油,避免油缸吸空。
3.左行走阀(左片上面)在中位时,A3,B3两腔相通(Y型阀)并与回油相通,行走马达不制动(机械制动)。当a3进伺服油阀杆向右移位时,压力油经单向阀4从A3口进入马达。B3口回油,罗辑阀没有油流入,负流量输出没有压力,主泵排量变大。(由此可知,凡是有一个阀杆不在中位,都没有负流量压力信号输出,主泵流量变大。当阀杆稍开或半开,则有负流量信号,起油泵的调速作用。此点以后不再说明。)当b3进伺服油阀杆向左移位时,变成B3口出油,A3口回油。其他情况相同。右片阀最上面一组为右行走阀,其结构与作用和左行走阀相同。
为实现直线行走功能,设置了直线行走阀1,其工作情况如下:阀组从p1口引进了伺服泵的控制油,其压力一般为35kgf/cm2—40kgf/cm2,这个控制压力作用在直线行走阀1的右端,同时穿过右片阀的铲斗阀,动臂阀,经过中片后又穿过左片阀的斗杆阀和回转阀,最后进回油道。当铲斗,动臂,斗杆,回转任一个阀有动作(移位)时,这控制压力将不能通回油而升高压力,从而将推动直线行走阀1,使其向左移,此时两个行走阀的进油路连通,成为并联油路。只要有一个泵供油两边的行走可同时运行。而另一个泵的油可作其他动作,如动臂,斗杆等。即实现了直线行走功能。
4.右片设有备用阀,以便装其他工作装置时使用,如液压破碎器等。
5.铲斗阀动作情况与回转阀基本相同。
6.动臂阀(右片下面),当a1口进伺服油时,阀杆向右移,右路主泵的压力油从A1口进动臂缸大腔,动臂缸小腔的回油从B1口经阀内油道回油。
a1口进伺服油的同时,C口也进伺服油(外接管路接通)并推动动臂合流阀上部的二位阀向左移,断开从单向阀来的左路泵的压力油,使左路泵的压力油推开罗辑阀7进入右路主油道,同时给动臂缸大腔进油。即双泵合流。(当动臂阀杆右移的同时,阀杆左端b口来的控制油被断开,左路罗辑阀b口因不能回油而使压力升高,罗辑阀关闭,左路油不能经罗辑阀及负流量控制阀回油只能经合流阀7进入右路实现合流。
7.阀组右下端Rs口也是回油口接回转马达回油口,作为回转马达的回油或补油。
1. 行走直线阀(图3—34中的1)见图3—35
图3—36行走直线阀
1.堵头2弹簧3“0”形圈4阀芯 (图3-35)
当控制油有压力时(伺服油压力)推动阀芯4向左移,使右路油与左路油沟通,以保证直线行走。
2.罗辑阀(图3—34中的2)见图3—36
1接头(图3—34中罗辑阀b口) 2挡圈3“0”形圈4弹簧5.阀芯当b口未被切断时主油道的油通过阀芯4的节流孔经b口以及管道,进入右片阀下面的b口,再经动臂阀杆左端油道回油。(见图3—34)此时由节流孔压差的作用,节流孔下面的压力大,推动阀芯5压缩弹簧4,使阀芯向上移动,打开主油道与回油道的通路,此时大量的油经回油道回油。
当b口的油被动臂阀杆的移动而切断时,节流口没有油流过,也就没有压差,也就是阀芯5上下端压差为0,但阀芯5上端面积大总有个向下的力,使阀芯5封住主油道与回油道的通路,当主油路的压力越大封堵力越大,所以能迫使左路油经合流阀7进入右路与右路油合流后进入动臂缸大腔。
3负向流量信号阀(图3—34中的3)见图3—37
1阀芯2“0”形圈3弹簧4接头座5.垫片6.垫片7阀体
负向流量信号阀安装在罗辑阀与回油道之间,当回油时由于弹簧3的作用阀芯1尚未打开,回油从阀芯1的节流孔流出,当回油量增大时节流阻力增大,这时阀芯1推动弹簧右移,阀芯1打开,回油压力与弹簧力保持平衡,嘴口输出一个压力信
号。这个压力信号随回油量的多少而变化,回油量多时fL的压力高。FL最高时约为40kgf/cm2。
4单向阀(图3—34中的4)见图3—38
在图3—34中由主泵进口P1到罗辑阀2的这一路油穿过各阀组,这条油道是主油道。但阀杆移位后这条油路都被切断,通过阀杆到A口或B口进入油缸的油都是从进油道来的油。见图3—34中的4单向阀处。图3—38单向阀就表示它的结构,当阀杆移位后,主油道被切断,主油道的油推开单向阀芯5而进入进油道。
1.导杆2主阀芯3阀套4弹簧5.先导阀芯6先导阀座7.弹簧8弹簧9调压螺塞10.锁紧螺母
主安全阀控制液压系统最高压力值,以保护各液压元件的安全。其工作过程如下,见图3—39,主油道(高压腔)的压力油通过导杆1的中心小孔进入A腔,由于弹簧8将先导阀芯5压紧在先导阀座上使A腔封闭,A腔的压力与主油道(高压腔)的压力相同。
当A腔的压力升高到设定值时(即调定的安全压力),可服弹簧8的予紧力使先导阀芯向右移动,A腔的油经先导阀芯5与先导阀座6之间的空隙流入B腔(B腔与回油道相通),此时A腔的压力下降,主油道的压力推动主阀芯2向右移打开主油道与回油道之间的通路,使部分高压油回油,系统压力不再升高。
当系统压力下降时,弹簧8的推力使先导阀芯5与先导阀座6压紧,A腔与B腔断开A腔压力升高使主阀芯2压紧在阀座上,主油道与回油道断开,即主安全阀关闭。
6阀杆结构见图3—40
图中A口,B口接执行元件
T为回油道(两边)
0为来油道(由进油口来油或由前一组阀来油)
H为通油道(通向下一组阀)
J为进油道(向A口或B口供油)
图示位置是阀的中立位置(a口,b口未通伺服油),此时0通道的来油经阀杆与阀体之间的孔隙流向H通道并进入下一组阀。而A口和B口处于封闭状态。
当右端a口通入伺服压力油时,阀杆向左移,o到H的通道被阀杆截断(两处),0油道的油推开单向阀(参见图3—38)进入进J。与此同时,由于阀杆的左移使进油道J与A口接通,给执行元件供油。而B口与左端的回油道T相通即回油。
当左端b口通入伺服压力油时,阀杆右移,B口出油而A口回油。
7.动臂提升(动臂油缸大腔合流)
图中表示当动臂提升时左路油进入右路,合流后进入动臂缸大腔。参见前面说明。
8行走、回转复合动作见图3—42
行走和回转同时动作时左路油供回转阀,右路油供两个行走阀使两条履带行走。因行走直线阀的作用,两个行走阀并联,而且右路油因单向阀的作用不能进入左路,保证行走优先。左路油供回转阀的同时,可从并联油路进入行走阀,怛节流阀(见图3—34中的6)保证了回转的需要。
9.回转,斗杆下降复合动作
(A)基本机构
KMX阀是日本川琦公司研制的,由于性能较好目前多数挖掘机主在采用。该阀的外形见图3-46
KMX阀由左片阀,右片阀,行走直线阀和斗杆锁定阀等组成。
KMX阀的分解见图3—47和图3—48。
(B)系统原理图
KMX阀的系统见图50
由上图可知:
(1) 动臂大腔,斗杆可以合流,铲斗有速度加快。
(2) 具有回转优先,以及动臂1优先于斗杆2。
(3) 具有行走直线阀。
(4) 中位负向流量控制。
(5) 斗杆回路设有再生回路,并具有斗杆锁定阀。
(6) 斗杆小腔,动臂大腔设有节流限速。
(7) 主安全阀有二次增压。(行走用)
(8) 有备用阀。(用于附属装置)
图中1,行走直线阀2,回转优先3,斗杆再生阀4,斗杆锁定阀5.铲斗2速阀
主油路部分在后面举例说明,先说明控制油路的流向。控制油(伺服油)从图下面Ps口引入分成两路。
左路:通过节流阀向上(同时进入行走直线阀待命)流过回转阀,动臂2,斗杆1,然后,转入右阀片,流过铲斗阀,动臂1,备用阀,最后到T点(回油点),向上从Dr口接回油。此时,因流经各阀均在中位,回油通畅,节流阀后都是低压。当流经各阀有任何一个动作时则左路控制油被截断而不能回油,此时压力升高,从而使进入行走直线阀1的油高压待命。
右路:通过节流阀向上(同时通到信号油口Pr和到行走直线阀1的上端)。绕过左面行走阀后,流向右片通过右面行走阀后到T点,也是从Dr口回油。当行走阀动作时,右路油的回油路被截断,压力升
高,从而推动此开关阀向下移,打开通道。使正在待命的高压油通过开关阀去推动行走直线阀。阀芯右移,使一个泵的油同时供给左右行走阀实现直线行走。
KMX阀的合流方式采用两组阀,即在左右两片阀中各设一组阀来实现。除了本来设置在右片阀中的动臂1之外,又在左片阀中设置了动臂2,半截阀只给大腔合流。而斗杆的合流,除了本来设置在左片阀中的斗杆1外,在右片阀中又设置了斗杆2,实现斗杆双向都合流。
KMX阀与U28阀相比尚有如下不同:
1.用一个主安全阀控制两路油的压力。
2.装有斗杆锁定阀,使斗杆下沉量小。
3.装有半推阀使动作可控。
4.设有铲斗2速阀5,该阀设在左路最顶端主回油路上,当操纵铲斗阀时,同时有一路伺服油进入双速阀上端,使阀芯下移,此时,左路的回油被切断,左路油从外接管路引到右路,由铲斗阀的进油道进入铲斗阀,使铲斗挖掘速度加快。
(C)KMX阀运行情况说明
a)回转与动臂提升复合动作(动作速度可调节)见图3—51
左路油供回转,同时由并联油路经回转优先阀向动臂2供一部分油。右路油供动臂1。动臂1动臂2合流后鸿动臂缸大腔使动臂提升。回转优先阀由电磁比例控制阀调节开度,即调节进入动臂2的油量,也就是调节动臂提升和回转的速度。见图3-52
b)回转和斗杆提升复合动作(动作速度可调节)见图3-53
图3—53回转和斗杆伸出复合动作
左路油供回转,同时由并联油路经回转优先阀向斗杆1供一部分油。右路油供斗杆2。斗杆1斗杆2
合流后供斗杆缸小腔,使斗杆伸出。调节旋钮通过电磁比例控制阀调节回转优先阀的开度,即调节进入斗杆1的油量。当开度大时,进入斗杆1的流量多,进入回转的流量就少。这样斗杆伸出的快,回转慢。
当回转优先阀的开度小时,进入斗杆1的流量小,进入回转的流量就多,这样斗杆伸出的慢,回转快。这就可以根据施工的要求调节回转和斗杆的速度比例。(在上述调节过程中右路油供斗杆2的流量不变)
c)回转和斗杆快进复合动作(斗杆下降或轻负荷伸出)见图3—54
图3—54回转和斗杆快进复合动作
左路油供回转,同时由并联油路通过回转优先阀供给斗杆l,此时斗杆负荷很低(特别是斗杆下降时),左路油会大量的流向压力低的斗杆l,而回转需要的油却保证不了。为避免这类问题,设置了行程限制器(半推)。推动行程限制器的伺服油,是引回转的操纵油,当操纵回转时同时有一股油引到行程限制器,并将其推动,使斗杆1的行程受到限制,而保证回转的压力,使回转正常运行。行程限制器只对斗杆缸大腔起作用,对小腔进油不起作用。
右路油进入斗杆2不受影响,井与斗杆1的油合流后进入斗杆缸。
d)回转,动臂提升和斗杆复合动作见图3—55
这种复合动作一般出现在装车作业工况,要求回转和动臂提升有适当的配合,即回转的角度和提升高度恰到好处。左路油供回转,动臂2和斗杆1。右路油供动臂1和斗杆2。由回转调节旋钮调节回转优先阀使动臂上升速度调节到最佳值,使动臂与回转有良好的配合。
由另一个电磁比例控制阀调节右路油上的动臂优先阀,调节进入斗杆2的油量调节斗杆与动臂的速度配合。通过这些调节使各动作有良好的配合,使作业速度尽可能加快。
e) 动臂提升和斗杆收回复合动作见图3—56
图3—56 动臂提升和斗杆回收复合动作
比较典型的是平整场地作业。
左路油供动臂2和斗杆1。右路油供动臂1和斗杆2。这时动臂和斗杆并联供油,而动臂提升压力高,要求流量小。斗杆压力低,要求流量大。由于未动回转,回转优先阀也不动作,动臂优先阀也不宜使用,因为推动动臂优先阀后将使斗杆流量减小,使动臂流量增大,这不符合工况要求。最好的方案是减小动臂操纵杆角度,即减小动臂阀的开度。
f) 动臂提升,斗杆回收和铲斗挖土复合动作见图3—57
国内外小型挖掘机发展综述外文文献翻译、中英文翻译、外文翻译
中国地质大学长城学院 本科毕业设计外文资料翻译 系别:工程技术系 专业:机械设计制造及其自动化 姓名:吴宝生 学号: 05211615 2015 年 1 月 22 日
国内外小型挖掘机发展综述 1液压挖掘机简介 液压挖掘机是由发动机、液压系统、工作装置、行走装置和电气控制等部分组成。液压系统由液压泵、控制阀、液压缸、液压马达、管路、油箱等组成。电气控制系统包括监控盘、发动机控制系统、泵控制系统、各类传感器、电磁阀等。液压挖掘机一般由工作装置、回转装置和行走装置三大部分组成。根据其构造和用途可以区分为:履带式、轮胎式、步履式、全液压、半液压、全回转、非全回转、通用型、专用型、铰接式、伸缩臂式等多种类型。 工作装置是直接完成挖掘任务的装置。它由动臂、斗杆、铲斗等三部分铰接而成。动臂起落、斗杆伸缩和铲斗转动都用往复式双作用液压缸控制。为了适应各种不同施工作业的需要,液压挖掘机可以配装多种工作装置,如挖掘、起重、装载、平整、夹钳、推土、冲击锤等多种作业机具。 回转与行走装置是液压挖掘机的机体,转台上部设有动力装置和传动系统。发动机是液压挖掘机的动力源,大多采用柴油要在方便的场地,也可改用电动机。 液压传动系统通过液压泵将发动机的动力传递给液压马达、液压缸等执行元件,推动工作装置动作,从而完成各种作业。以工地使用较多的PV-200型液压挖掘机为例。该机采用改进型的开式中心负荷传感系统(OLSS)。该系统用控制斜盘式变量柱塞泵斜盘角(输出流量)的方法,减少了发动机的功率输出,从而减少燃油消耗,是一种节能型系统。这种液压系统的特点是:定转矩控制,能维持液压泵驱动转矩不变,载断控制,可以减少作业时间的卸荷损失;油量控制,可减少空挡和小调控制时液压泵的输出流量,减少功率损失。 械到电力驱动和内燃机驱动回转挖掘机、应用机电液一体化技术的全自动液压挖掘机的逐步发展过程。由于液压技术的应用,20世纪40年代有了在拖拉机上配装液压反铲的悬挂式机械,20世纪50年代初期和中期相继研制出拖式全回转液压挖掘机和履带式全液压机械。初期试制的液压挖掘机是采用飞机和机床的液压技术,缺少适用于机械各种工况的液压元件,制造质量不够稳定,配套件也不齐全。从20世纪60年代起,液压挖掘机进入推广和蓬勃发展阶段,各国机械制造厂和品种增加很快,产量猛增。1968-1970年间,液压挖掘机产量已占机械总产量的83%,目前已接近100%。 2小型挖掘机的发展及其趋势 20 世纪80~90 年代小型挖掘机在市政工程、交通、管道等施工中发挥了较大优势并得以迅速发展。它在城市的土建施工工程中为节省人力、物力出了较大贡献 , 逐步成为城市施工中具有代表性的施工机械。 小型挖掘机的发展主要依赖于城市建设的发展,由于城市的改造、建设施工较多,要求施工时间短、施工机械对周围环境影响小、安全、低污染、回转半径小、便于运输以
液压挖掘机智能化控制系统
液压挖掘机智能化控制系统 余会挺,李丽 (煤炭科学研究总院上海分院,上海200030) 摘 要: 提出一种基于模糊算法和遗传算法相结合的自适应控制方法,对挖掘机的挖掘轨迹进行自动控制,取得了较好的应用效果。 关键词: 矿山;挖掘机;遗传算法;模糊控制 中图分类号:T D422.2+2 文献标识码:B 文章编号:1001-0874(2008)05-0031-04 I nte lli gent Contr o l System of Hydrauli c Excava t o r YU Hui2ting,L I L i (Shanghai B ranch of China Coal Research I nstitute,Shanghai200030,China) Ab s trac t: A fuzzy self2steering tracing contr ol syste m of hydraulic excavat or based on combinati on of fuzzy algorith m with genetic algorithm is p r oposed.The good efficiency of p resented method app lied t o s ome excavat ors has already been shown. Keywo rd s: m ine;excavat or;genetic algorith m;fuzzy contr ol 1 引言 随着科学技术的迅猛发展,智能化控制成为挖掘机技术发展的主要课题之一[1]。随着液压传动技术的发展及液压部件的质量提高、成本的降低,上世纪80年代,液压挖掘机替代了机械式挖掘机。液压挖掘机具有重量轻、体积小、结构紧凑、传动平稳、操纵简单、以及容易实现无级变速和自动控制等一系列优点。随着计算机技术、电子技术、传感器技术、机电一体化技术的发展,液压挖掘机正向着高效率、高可靠性、安全节能及自动化、智能化的方向发展[2]。 本文对液压挖掘机工作装置轨迹智能化控制进行研究。 2 挖掘机工作装置 (1)结构 液压挖掘机工作装置是由动臂、斗杆、铲斗和液压油缸等构成的连杆机构,通过电液控制系统控制液压油缸的伸缩实现运动控制[3]。挖掘机工作装置电液驱动控制系统的控制模型结构如图1所示,并在作业过程中采用通过电磁比例先导阀控制多路换向阀的方法 。 图1 挖掘机电液驱动控制系统图 图2 挖掘轨迹控制图 (2)轨迹控制原理 挖掘机工作装置轨迹控制系统由电液伺服系统、控制器、压力传感器、角度传感器、操作手柄、人机交互模块(上位机)等组成。在液压油缸驱动下 控制动臂角θ 1 、斗杆角θ 2 、铲斗角θ 3 (图2),实现挖掘机工作装置轨迹控制。控制器预先设定工作装置的运行轨迹,通过编程将其离散化。在实时控制时, 采集角度传感器测得的转角θ 1 、θ 2 、θ 3 ;将其与设定
液压挖掘机设计开题报告
目录 目录 (1) 一、选题的目的和意义: (2) 二、国内外研究现状(文献综述) (2) 2.1挖掘机的机器人化 (2) 2.2遥控挖掘机的研究 (3) 2.3挖掘机节能技术的研究 (4) 2.4振动挖掘机理研究 (5) 三、市场发展状况(市场分析) (6) 3.1挖掘机的多功能化 (6) 3.2挖掘机的智能化 (7) 3.3挖掘机的实用型设计 (8) 四、选题研究的内容: (8) 五、选题研究的技术路线、研究方法和要解决的主要问题: (8) 六、研究工作进度: (9) 七、参考文献: (9) 1
一、选题的目的和意义: 挖掘机械是一种集土方挖掘、装载、平整、拆除、抢险等作业的工程机械,广泛应用于各类土石方工程施工、民用建筑、道路建设和市政工程场所。近年来伴随着我国经济的快速增长,大规模的基础设施建设对挖掘机提出了强劲的市场需求,我国挖掘机械的产销量每年均有15%~30%的爆炸式增长,2011年更是达到了70%,另一方面,挖掘机作为技术复杂的终端机械产品,其开发和制造涉及机械、液压传动、冶金、石油化工、电气等众多行业,已经形成了一个庞大的产业集群。因此,大力开展对液压挖掘机的研究和探索,对于提升国家整体工业水平和加速国民经济的发展具有重大的促进意义。 二、国内外研究现状(文献综述) 2.1挖掘机的机器人化 为延伸人类在复杂、恶劣、危险环境中的作业,世界各国对机器人化挖掘机的研发工作非常重视,国外在这方面研究比较早,较为典型的有: ①Carnegie Mellon大学的自主装载系统(Au—tonomous Loading System,ALS)t'Jt~ALS系统使用两个激光扫描测距仪,对车辆进行确认和准确定位、观测土壤表面情况、识别障碍物等。该系统还提出一种用于实时轨迹规划和执行复杂挖掘机器人运动的参数化控制方法。相同情况下,普通挖掘机熟练的操作手装满一卡车需要120S,而使用该系统也不超过150S,完成一个装载循环的时间小于1min,与熟练的操作手的操作速度基本相当。因此该系统能满足连续重复挖掘装载的工况要求。关于该系统的具体说明见于下面两篇论文:Peyret F,Jurasz J.The Compu~r Integrated Road Construction pmject[J].Automation in Construction,2000(9)Singh S,Cannon H_Multi-Resolution Planning for Earthmoving.Proceedings International Conference on Robotics and Automation[C].Leuven,Belgium,1998 ②国内机器人化挖掘机的研究国内在这方面研究相对较迟,浙江大学冯培恩教授从上世纪80年代开始率先着手研究挖掘机机电一体化技术,首先实现挖掘机器人作业过程的分级规划和局部自主控制圈。但是他们在任务 2
挖掘机主溢流阀压力调整方法
挖掘机主溢流阀压力调整方法 来源:铁甲工程机械网责任编辑:宋学征作者:极光发布时间:2011-09-20 [铁甲工程机械网原创] 您的设备在工作过程中是否也出现过全车动作缓慢,感觉设备一下子就从青年时期到了老年,使您徒增不少烦恼?如何迅速排解故障舒畅自己的心情呢?本文在这里支招为您排忧解难。 导致全车动作慢的原因之一就有全车压力无法建立,压力低,而设备的主溢流阀很有可能就是导致该故障发生的罪魁祸首。主溢流阀位于分配器阀体上的一个安全阀,其作用是限制整个液压系统的最高压力,以保护整个系统不至于损坏,如果该阀中的弹簧断裂或调定压力过低,将导致整个系统的压力过低,因主溢流阀的泄压使整个液压系统无法建立起设备
正常工作所需压力,则主泵压力油就不能推动执行元件正常工作,就会出现全车动作慢甚至于无动作现象,此时应检查更换或调整主溢流阀。 分配器 判断主溢流阀是否出现故障需测定主溢流阀的调定压力,测压时,各品牌设备情况不一,参照设备使用手册选择量程合适的油压表安装在测压口上,一般600BAR的油压表就可以;启动设备,发动机全油门运转,液压油温度应在45~55摄氏度左右,并将铲斗缸,动臂缸,斗杆缸分别伸缩到尽头,使系统溢流,然后测量压力值。如果上面所测的6个数值中有4个或过多的数值基本一样又低于标准值时,基本可以认定为主溢流阀故障。以斗山K3V泵为例,此泵的测压口安装有压力传感器,有前后泵之分,为两个测压口,且各执
行元件的溢流压力可以通过驾驶室内的仪表盘读取数据(读取方法参照设备使用手册),这样比较方便检查维护和了解设备运行状态;多部分机型系统压力约为330BAR。 液压泵
液压挖掘机主控制阀工作原理
液压挖掘机主控制阀 液压挖掘机主控制阀 液压挖掘机主控制阀 液压挖掘机主控制阀 液压挖掘机主控制阀 主控制阀也称为主控阀或主阀,它的作用是按操作者的指令将泵排出的压力油提供到液压挖掘机主控制阀 各执行元件,使挖掘机完成各种动作。主控阀是个复杂的液压元件,现就几种典型的主控阀加以说明。 1.U28阀 U28阀是日本东芝公司生产的专用于20—3t的挖掘机上。其外形见图3—32 图3—32 U28阀外形图 该阀是一组多路阀,阀体分左,中,右三片,用螺栓紧密相联。左片是一组三联阀(上图中1,2,3号阀),中间片是油道,右片是一组四联阀(上图中4,5,6,7号阀)。 该阀具有如下功能: (1)单独动臂提升时双泵合流供油,提高动臂提升速度。(只在动臂提升时) (2)斗杆单独动作时双泵台流供油,加快斗杆动作速度。 (3)动臂优先,动臂与其他动作同时进行时,动臂的动作将优先保证。 (4)回转优先,回转与斗杆同时动作时,回转将优先保证。 (5)负流量控制,给主泵提供一个负流量信号,使阀杆在中位时,主泵排量变为最小。 (6)直线行走,当挖掘机前进或后退时可同时作其他动作,以保证特殊工况的需要。 (7)可配置电传感器,以满足电控的需要。 (A)液压系统符号
图中下面油口中,两个P1分别与两个主泵的出油口相接,是主进油口P2~口P3用油管连接,作为斗杆合流时的辅助进油。 b口与上面b口(左罗辑阀出口)用油管连接。 C口与动臂阀伺服油a1口相连,作为动臂合流的信号。 R口是主回油,接液压油散热器,然后回油箱。 a口与上面a口(右罗辑阀出口)用油管连接。 Py1和Py2与左,右行走操纵阀(脚踏阀)的出油连接,使行走增压。 上面油口fL和fR分别与两个主泵的负流量控制接口相接。 G口作为信号输出可作他用,如接压力传感器等。 当各阀杆在中立位置时(无操作时),左路P1通过三组阀后,推开罗辑阀2,经过负流量阀3进入回油道,从主回油口R回油箱。右路P1通过四组阀后,推开罗辑阀,经过负流量阀进入回油道,从主回油口R回油箱。 此时,两个负流量阀接口fL和fR分别有压力信号输出到主泵的调节器,使主泵排量减小。这是阀杆全部处于中立位置时油的流向。如果阀杆移动将有下面的情况。 1.回转阀(左片下面)移动时,假设a1口进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A1口,油从A1口流出进入回转马达。由回转马达流回的油经B1口从该阀的回油口流入回油道。此时,这一路油被引入执行元件回转马达而使挖掘机回转,上面的两组阀没有油通过,所以,负流量输出口fL没有压力输出,主油泵排量变大。 2.斗杆阀(左片中间一组)移动时,假设a2进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A2口,油从A2口流出进入斗杆油缸大腔。由斗杆油缸小腔流回的油经B2口从该阀的回油口流入回油道。此时,这一路油被斗杆阀切断,上面的一组阀没有油通过(指到罗辑阀处没有油,经节流阀6来的并联油路的油在单向阀4处被断开)。所以,负流量输出口fL没有压力输出,主油泵排量变大。 当该阀杆向右移时,阀杆右端切断了控制油到回油道的通路(虚线,从a口来的油,即从右片阀的罗辑阀出口a经外接管道进入下面a口)。使右片阀的罗辑阀出口a被堵截,右面主泵压力油从罗辑阀心
挖掘机行走装置-开题报告
设计(论文) 题目 履带式挖掘机行走装置的设计 设计(论文)类型(划“√”)工程设计应用研究开发研究基础研究其它 √ 一、本课题的发展现状 履带式挖掘机属于工程机械,而工程机械是国民经济建设及国防工程施工中使用的重要技术装备,在国民经济建设中,尤其是城市建设、民用建筑、水利建设、道路构筑、机场修建、矿山开采、码头建造、农田改良中,工程机械起着越来越重要的作用。我国的工程机械行业目前进入了一个高速发展阶段,推、挖、装、起重、铲土运输、筑路、农用机械等各种品种齐全并形成了系列化,各种工程机械虽然品种很多但基本上可划分为动力装置、行走装置和工作装置。行走装置是全机的基础。 二、本课题的国内外发展趋势 由于传统履带式挖掘机具有很多的不足之处(如跨越障碍物的能力弱,摩擦阻力损失大,性价比高,稳定性差等),因此未来挖掘机的结构逐渐向着实用化的方向发展,从而呈现出新的发展趋势。 1)挖掘机的各个零部件趋于系列化,利于机械的维修。 2)新型的液压式挖掘机的稳定性得到进一步的改善。 三、本课题的主要研究内容(提纲) 1、履带式挖掘机的发展趋势 2、托链轮体及轮架的制造过程 3、传动方案的总体设计 4、履带张紧装置的设计 5、履带式行走装置的总体方案设计 6、驱动轮设计 7、导向轮设计 8、支重轮的设计
四、文献综述(国内外研究情况及其发展) 从国内情况来看,我国挖掘机行业整体发展水平较国外缓慢,在挖掘机液压系统方面的理论还比较薄弱。国内大部分挖掘机企业在挖掘机液压系统传统技术方面的研究具有一定基础,但由于采用传统液压系统的挖掘机产品在性能、质量、作业效率、可靠性等方面均较差,因此采用传统液压系统的挖掘机在国内市场上基本失去了竞争力,取而代之的是采用各种高新技术的国外挖掘机产品。先进的挖掘机液压系统都被国际上一流的生产企业垄断,国内企业在该领域的研究几乎是空白,这样国内的挖掘机生产厂家就无法独立制造出性能优异的挖掘机,绝大部分的市场份额都被国外各种品牌的挖掘机所占据。以20t级的中型液压挖掘机为例,国产20t级挖掘机大多数是欧洲80年代初的技术”,同90年代初以来在国内形成批量的日本小松、日立、神钢以及韩国大宇、现代等机型相比,其主要差距柴油机功率偏低,液压系统流量偏小,液压系统特性差,导致平台回转速度低,行走速度低,各种性能参数均偏小,整机性能和作业效率较国外偏低。研究挖掘机的节能控制处于非常关键的地位,决定了国内挖掘机今后的竞争力。尽管国外挖掘机节能控制已经发展到了非常成熟的地步,但并不意味着我们没有一点机会,混合动力汽车的发展为我们挖掘机等工程机械的的节能提供了很好的借鉴,说明挖掘机节能还有很大的潜力可挖,乐观估计的话应该还有50%的节能潜力。 中国工程机械行业从形成、发展到壮大,成为世界工程机械大国,经历了短短的40余年,特别是改革开放30年来,发展尤为迅速,以液压挖掘机为例,1993年我国液压挖掘机总销量为2349台,15年后的2008年我国液压挖掘机的总销量高达83000台,15年增长35倍。而2010年我国液压挖掘机的总销量已超过一万台,挖掘机行业在中国机械行业中占据了不可替代的地位。
挖掘机液压系统原理
一、主液压回路系统的构成 日立挖掘机主液压回路系统是由主液压系统和先导回路系统构成。主液压回路将泵的液压油供给各操作机能的促动器。 二、先导回路液压操作系统的组成 液压系统是由发动机、主泵、先导泵、控制阀各1台和四个液压缸、1台旋转马达及2台行走马达组合而成、泵通过输入轴由发动机所驱动。主泵的液压油通过控制阀流到各促动器。先导泵的液压油流入先导回路内。 三、主回路 1、主液压回路 主液压回路系由吸引回路、输出回路、回油路及牌友回路所构成。液压系统由主泵、控制阀、行走马达各一台及四个液压缸。 主泵是斜轴式排量可变型轴向活塞泵,是由发动机驱动的(发动机转速比为1.0) 2、吸引回路和输出回路 泵通过吸引滤油器吸引液压油箱的油,油从泵流入控制阀,然后由油箱口放出,主泵放出的油通过控制阀流至各促动器。 控制阀控制各种液压机能,从各促动器流出的回油通过控制阀和液压油冷却器流回液压油箱。 3、回油路 每个促动器放出的油全部通过控制阀流回液压油箱内。回油路内有旁道单向阀,其设定压力分别为9.8×10^4pa及4×9.8×10^4pa。通常回油通过液压油冷却器及左侧控制阀流回液压油箱, 油温低时,粘度变高,通过油冷却器时的阻力也随着增大。 油压超过9.8×10^4pa时,回油直接流回液压油箱,可在短时间内把油温提高到适当的高度。 油冷却器被阻塞时,回油通过旁道单向阀直接流回液压油箱。 旁道单向阀被阻塞时设在冷却器和液压油箱之间,其设定压力为4×9.8×10^4pa。 液压箱内设有直流式滤油器,从左右两侧的控制阀流出的油合流后经直流式滤油器过滤,直流式滤油器内有旁道安全阀。当滤芯阻塞使差压达9.8×10^4pa时,旁道安全阀就打开,油直接流回液压油箱。 4、排油回路 马达及刹车阀等内部漏的油以及润滑油回路内的油,全部都积蓄起来,经过排油回路流回操作油箱。 5、行走马达排油回路 左右两行走马达漏的油由各个马达壳的排油口排出,合流后通过中心接头,经过直流式滤油器流回液压油箱。 6、旋转马达排油回路 旋转马达漏的油排出后,与行走回路排出的油一起通过直流式滤油器流回液压油箱。 7、输出压控制 控制阀内的卸载安全阀控制泵的输出压力保持一定。全部操作均在330×9.8×10^4Pa设定压力操作。 在挖掘操作时,设定压力变为370×9.8×10^4Pa。 狼涌截止安全阀把高压油释放到液压油箱内,以免油压系统及发动机承受过负荷。 8、先导回路 先导回路是由吸引、出油回路构成的。先导系统有先导泵、换冲阀、保险阀、2个高速电
挖掘机多路阀详解(1)
第一节多路阀主油路液压系统 多路阀是工程机械液压系统的重要部件,它是组成液压系统的主要部分,确定了液压泵向各液压作用元件的供油路线和供油方式,多液压作用元件同时动作时的流量分配,如何实现复合动作,决定了工程机械作业时运动学和动力学的特性,动作优先和配合,合流供油和直线行走等。它的设计依据是能否更好地满足工程机械作业要求和工况要求。工程机械多路阀有采用通用的多路阀,但为了更好的满足工程机械的性能要求,不少工程机械采用专用多路阀,专用多路阀液压系统应该是由了解和熟悉工程机械的主机厂来设计。液压系统原理图设计好后,多路阀的结构设计、工艺制造设计可由主机厂委托液压件厂来生产制造。 一,多路阀基本類型 工程机械多路阀液压系统大致可分为两大类:开中心直通六通阀系统和闭中心四通阀(负载敏感阀)系统,两者差异较大,需要分别讨论。
1,多路阀各阀之间油路连接基本方式 多路阀各阀之间油路连接方式主要是液压泵压力油向各阀供油连接方式,供油方式不同则多路阀阀杆同时动作,实现多液压动作元件复合动作时,其运动特性和力学特性不同。多路阀内阀杆油路连通基本方式有串联式、并联式、优先式(串并联)三种。 2 2 1 12 2 1 1 2 2 1 1 (a)串联式(b)并联式(c)串并联式 图14 多路阀阀杆油路连接基本方式 1.串联式(图13(a)所示) 前联换向阀的回油口和后联换向阀的进油口相连,串联油路的特点可以实现两个和两个以上液压动作元件同时动作。液压泵的工作压力是同时工作液压元件压力的总和。 在初期挖掘机上曾采用过这种油路。但是挖掘机一般都在重负荷下工作,为了使结构紧凑,减轻重量,每个液压作用元件都按液压泵压力设计,不允许两个液压元件串联工作,因此串联油路目前在挖掘机上不采用。 2.并联式(图13(b)所示) 液压泵出口压力油并联供给各阀杆,各阀回油并联回油箱,并联油路特点是多路阀杆同时动作时,泵供油首先进入负荷压力最低的液压元件,负荷高的液压元件由于压力低不能动。要实现多液压元件同时动作,必须通过低负荷阀杆节流,提高系统油压,通过各阀杆开口量控制去各液压元件的流量来实现同时动作时的调速。因此并联方式要实现复合动作,须有高超的技术。但是不稳定,随各液压元件负荷变化情况和发动机转速等因素变化。可以说该油路实现同时复合动作较困难。 3.优先式(串并联式)(图13(c)所示) 液压泵出口压力油按上下油优先顺序供油,上游的阀杆打开进行工作时,就把下游阀杆的进油路切断了,因此下游阀就得不到液压泵压力油,就无法动作。优先阀回油路并联回油,虽然如果上游阀杆不在最大开度位置,部分油会通过节流口流向下流阀,存在下流阀控制的液压元件动作的可能性。但是严格来说优先油路只能一个液压作用元件动作。 2,多路阀中位卸载方式 (1),开中心卸載:多路阀处于中位不工作时,液压泵所供压力油能通过各阀杆直接回油箱,各阀杆都处于进油口和回油口相通,也就是中位是开式的,我们称它为开中心. (2,)闭中心通过卸载阀来卸载:多路阀在中位时,各阀杆进油口都处在关闭状态,液压泵所供压力油不能通过多路阀,被封闭的压力油,必須通过設立缷载阀来卸荷,多路阀中位是关闭的,所以称为闭中心.
挖掘机毕业设计开题报告书
附表2: 毕业设计开题报告
于修筑铁路的繁重工作,被认为是现代挖掘机的先驱,距今已有170多年的历史。1950年,德国研制出世界上第一台全液压挖掘机(图1-2)。由于科学技术的飞速发展,各种新技术、新材料不断在挖掘机上得到应用,尤其是电子技术和信息技术的应用使得液压挖掘机在作业效率、可靠性、安全性和操作舒适性以及节能、环保等方面有了长足的进步。目前液压挖掘机已经在全世界围得到广泛应用,成为土石方施工不可缺少的重要机械装备。 图1-1 蒸汽机驱动的“动力铲”图1-2 早起全液压挖掘机 3.1.1国液压挖掘机的发展概况 我国从1967年开始自行研制液压挖掘机。早期开发成功的产品主要有上海建筑机械厂的WY100、矿山机器厂的W4-60、矿山机器厂的WY60等。到20世纪701年代末80年代初,长江挖掘机厂和重型机械厂分别研制成功了WY160和WY250等液压挖掘机产品。从1994年开始,美国的卡特彼勒公司、日本的神户制钢所、日本的小松制作所、日本的日立建机株式会社、韩国大宇重工、韩国现代重工业以及德国利勃海尔、德国雪孚、德国阿特拉斯、瑞典沃尔沃等公司先后在中国建立了中外合资、外商独资挖掘机生产企业,生产具有世界先进水平的多种型号和规格的液压挖掘机产品。 近年来我国经济增长迅速,液压挖掘机市场需求不断扩大,形成了巨大的挖掘机市场空间,但该行业主要由合资企业和外资企业所垄断。国一些工程机械行业的上市股份公司通过合资的方式介入了挖掘机产业,同时国还有众多的企业也在生产液压挖掘机,但在生产规模、
铲斗挖掘力可达25KN。卡特彼勒公司最小的微型挖掘机为301.5,其整机质量只有1673kg,发动机功率为13KW,斗容量围为0.018~0.056m3。如图1-4为微型挖掘机。 图1-3 超大型液压挖掘机图1-4 微型挖掘机 (2)液压挖掘机的多功能化 中、小型液压挖掘机趋向于一机多能,配备了多种工作装置。除正铲、反铲外,还配备了起重、抓斗、平坡斗、装载斗、耙齿、破碎锥、麻花钻、电磁吸盘、振捣器、推土板、冲击铲、集装叉、高空作业架、绞盘及拉铲等,以满足各种施工的需要。与此同时,发展专门用途的特种挖掘机,如低接地比压、低噪声、水下专用和水路两用液压挖掘机等。 (3)液压挖掘机的电子化和信息化 世界上各大液压挖掘机生产厂商在应用新技术、新工艺、新结构,加快标准化、系列化、通用化发展速度的过程中,重视电子技术、信息技术在挖掘机上的应用,使挖掘机向高效、节能、安全、环保以及操作方便舒适的方向发展。从20世纪80年代开始,以微电子技术为核心的高新技术,特别是微机、微处理器、传感器和检测仪表在挖掘机上的应用,推动了电子控制技术在挖掘机上的应用和推广,并已成为液压挖掘机现代化的重要标志。目前先进的液压挖掘机均装有电子控制单元(ECU),用于发动机和泵阀的电子控制以及工作模式控制和工作状
文献综述-马铃薯挖掘机设计
马铃薯挖掘机设计 摘要:马铃薯挖掘机的研究和应用进行介绍和分析,设计了组合分离式马铃薯挖掘机。对该机的主要参数进行了选择,对主要零部件的设计进行了理论计算和结构优化。马铃薯为地下产物,且是块茎繁殖,其收获受季节和天气限制。由于马铃薯的收获费时费力、劳动强度大且季节性强,因此给农民造成极大的困难。为了解决上述问题,本文就国内外马铃薯收获机现状、马铃薯挖掘机的研究和应用进行介绍和分析,设计了组合分离式马铃薯挖掘机。对该机的主要参数进行了选择,对主要零部件的设计进行了理论计算。 关键词:马铃薯;挖掘机;结构优化
Design of Potato Excavator Abstract: Potato is an under ground plant. Its harvest is limited by the crown of the year and weather. Since the potato harvesting process has some difficult problems for farmers such as being strenuous and time consuming, great in labor intensity and urgent in seasonal demand, the paper analyses the present situation of potato harvest, and a combined separation potato digger has been developed through selection of principal parameters and theoretical calculation for the design of essential parts. Key words:potato、excavator、optimize the structure
挖掘机开题报告
本科生毕业设计(论文)开题报告 题目: 姓名:学号 年级:专业: 指导教师:姓名职称 学科 2015年 3 月5 日 说明 一、开题报告前的准备 毕业设计(论文)题目确定后,学生应尽快征求指导教师意见,讨论题
意与整个毕业设计(论文)的工作计划,然后根据课题要求查阅、收集有关资料并编写研究提纲,主要由以下几个部分构成: 1.研究(或设计)的目的与意义。应说明此项研究(或设计)在生产实践上或对某些技术进行改革带来的经济与社会效益。有的课题过去曾进行过,但缺乏研究,现在可以在理论上做些探讨,说明其对科学发展的意义。 2.国内外同类研究(或同类设计)的概况综述。在广泛查阅有关文献后,对该类课题研究(或设计)已取得的成就与尚存在的问题进行简要综述,只对本人所承担的课题或设计部分的已有成果与存在问题有条理地进行阐述,并提出自己对一些问题的看法。 3.课题研究(或设计)的内容。要具体写出将在哪些方面开展研究,要重点突出。研究的主要内容应是物所能及、力所能及、能按时完成的,并要考虑与其它同学的互助、合作。 4.研究(或设计)方法。科学的研究方法或切合实际的具有新意的设计方法,是获得高质量研究成果或高水平设计成就的关键。因此,在开始实践前,学生必须熟悉研究(或设计)方法,以避免蛮干造成返工,或得不到成果,甚至于写不出毕业设计(论文)。 5.实施计划。要在研究提纲中按研究(或设计)内容落实具体时间与地点,有计划地进行工作。 二、开题报告 1.开题报告可在指导教师所在教研室或学院内举行,须适当请有关专家参加,指导教师必须参加。报告最迟在毕业(生产)实习前完成。 2.本表(页面:A4)在开题报告通过论证后填写,一式三份,本人、指导教师、所在学院(要原件)各一份。 三、注意事项 1.开题报告的撰写完成,意味着毕业设计(论文)工作已经开始,学生已对整个毕业设计(论文)工作有了周密的思考,是完成毕业设计(论文)关键的环节。在开题报告的编写中指导教师只可提示,不可包办代替。 2.无开题报告者不准申请答辩。
液压挖掘机主控制阀
液压挖掘机主控制阀 发表于:2008年3月18日 16时55分34秒阅读(4)评论(0)本文链接:h ttp://user.qzone.qq.com/479140927/blog/1205830534 液压挖掘机主控制阀 液压挖掘机主控制阀主控制阀也称为主控阀或主阀,它的作用是按操作者的指令将泵排出的压力油提供到各执行元件,使挖掘机完成各种动作。主控阀是个复杂的液压元件,现就几种典型的主控阀加以说明。 ? 1.U28阀?U28阀是日本东芝公司生产的专用于20—3t的挖掘机上。其外形见图3—32 图3—32U28阀外形图?该阀是一组多路阀,阀体分左,中,右三片,用螺栓紧密相联。左片是一组三联阀(上图中1,2,3号阀),中间片是油道,右片是一组四联阀(上图中4,5,6,7号阀)。 (1)单独动臂提升时双泵合流供油,提高动臂提升速该阀具有如下功能:? 度。(只在动臂提升时)?(2)斗杆单独动作时双泵台流供油,加快斗杆动作速度。 (3)动臂优先,动臂与其他动作同时进行时,动臂的动作将优先保证。 (4)回转优先,回转与斗杆同时动作时,回转将优先保证。 (5)负流量控制,给主泵提供一个负流量信号,使阀杆在中位时,主泵排量变为最小。 ? (6)直线行走,当挖掘机前进或后退时可同时作其他动作,以保证特殊工况的需要。 (7)可配置电传感器,以满足电控的需要。? (A)液压系统符号
?
图中下面油口中,两个P1分别与两个主泵的出油口相接,是主进油口P2~口P3用油管连接, 作为斗杆合流时的辅助进油。 b口与上面b口(左罗辑阀出口)用油管连接。 C口与动臂阀伺服油a1口相连,作为动臂合流的信号。 R口是主回油,接液压油散热器,然后回油箱。 a口与上面a口(右罗辑阀出口)用油管连接。?Py1和Py2与左,右行走操纵阀(脚踏阀)的出油连接,使行走增压。?上面油口fL和fR分别与两个主泵的负流量控制接口相接。?G口作为信号输出可作他用,如接压力传感器等。?当各阀杆在中立位置时(无操作时),左路P1通过三组阀后,推开罗辑阀2,经过负流量阀3进入回油道,从主回油口R回油箱。右路P1通过四组阀后,推开罗辑阀,经过负流量阀进入回油道,从主回油口R回油箱。?此时,两个负流量阀接口fL和fR分别有压力信号输出到主泵的调节器,使主泵排量减小。这是阀杆全部处于中立位置时油的流向。如果阀杆移动将有下面的情况。 1.回转阀(左片下面)移动时,假设a1口进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A1口,油从A1口流出进入回转马达。由回转马达流回的油经B1口从该阀的回油口流入回油道。此时,这一路油被引入执行元件回转马达而使挖掘机回转,上面的两组阀没有油通过,所以, 2.斗杆阀(左片中间一组)移动时,假设a 负流量输出口fL没有压力输出,主油泵排量变大。? 2进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A2口,油从A2口流出进入斗杆油缸大腔。由斗杆油缸小腔流回的油经B2口从该阀的回油口流入回油道。此时,这一路油被斗杆阀切断,上面的一组阀没有油通过(指到罗辑阀处没有油,经节流阀6来的并联油路的油在单向阀4处被断开)。所以,负流量输出口fL没有压力输出,主油泵排量变大。?当该阀杆向右移时,阀杆右端切断了控制油到回油道的通路(虚线,从a口来的油,即从右片阀的罗辑阀出口a经外接管道进入下面a口)。使右片阀的罗辑阀出口a被堵截,右面主泵压力油从罗辑阀心小孔进到该阀心上部,由于面积差的作用阀心被压住,使右路油不能从罗辑阀回油,强行使右路油经单向阀8进入斗杆阀,实现了左右两路油都进入斗杆阀,即双泵合流。?当伺服油进入b2,推动阀杆向左移时,主泵的油经B2进入斗杆缸小腔,而大腔经A2回油,其他情况相同,仍是双泵合?流。 在A2,B2的油路上装有过载溢流阀,它们的调定压力高于主安全阀,它们的作用是在该阀中位时,由外部的力使该油缸压力过高时此溢流阀泄油以保护油缸。而在油缸吸空时,如斗杆快速下降,斗杆油缸大腔需快速进油,如果双泵合流仍供不上时,油缸将吸空压力变低,此时过载溢流阀从回油路向油缸补油,避免油缸吸空。 3.左行走阀(左片上面)在中位时,A3,B3两腔相通(Y型阀)并与回油相通,行走马达不制动(机械制动)。当a3进伺服油阀杆向右移位时,压力油经单向阀4从A3口进入马达。B3口回油,罗辑阀没有油流入,负流量输出没有压力,主泵排量变大。(由此可知,凡是有一个阀杆不在中位,都没有负流量压力信号输出,主泵流量变大。当阀杆稍开或半开,则有负流量信号,起油泵的调速作用。此点以后不再说明。)当b3进伺服油阀杆向左移位时,变成B3口出油,A3口回油。其他情况相同。右片阀最上面一组为右行走阀,其结构与作用和左行走阀相同。?为实现直线行走功能,设置了直线行走阀1,其工作情况如下:阀组从p1口引进了伺服泵的控制油,其压力一般为35kgf/cm2—40kgf/cm2,这个控制压力作用在直线行走阀1的右端,同时穿过右片阀的铲斗阀,动臂阀,经过中片后又穿过左片阀的斗杆阀和回转阀,最后进回油道。当铲斗,动臂,斗杆,回转任一个阀有动作(移位)时,这控制压力将不能通回油而升高压力,从而将推动直线行走阀1,使其向左移,此时两个行走阀的进油路连通,成为并联油路。只要有一个泵供油两边的行走可同时运行。而另一个泵的油可作其他动作,如动臂,斗杆等。即实现了直线行走功能。 4.右片设有备用阀,以便装其他工作装置时使用,如液压破碎器等。 5.铲斗阀动作情况与回转阀基本相同。 6.动臂阀(右片下面),当a1口进伺服油时,阀杆向右移,右路主泵的压力油从A1口进动臂缸
液压挖掘机主控制阀
液压挖掘机主控制阀 发表于:2008年3月18日 16时55分34秒阅读(4)评论(0)本文链接: https://www.360docs.net/doc/7c18015437.html,/479140927/blog/1205830534 液压挖掘机主控制阀 液压挖掘机主控制阀主控制阀也称为主控阀或主阀,它的作用是按操作者的指令将泵排出的压力油提供到各执行元件,使挖掘机完成各种动作。主控阀是个复杂的液压元件,现就几种典型的主控阀加以说明。 1.U28阀 U28阀是日本东芝公司生产的专用于20—3t的挖掘机上。其外形见图3—32 图3—32 U28阀外形图该阀是一组多路阀,阀体分左,中,右三片,用螺栓紧密相联。左片是一组三联阀(上图中1,2,3号阀),中间片是油道,右片是一组四联阀(上图中4,5,6,7号阀)。 该阀具有如下功能: (1)单独动臂提升时双泵合流供油,提高动臂提升速度。 (只在动臂提升时) (2)斗杆单独动作时双泵台流供油,加快斗杆动作速度。 (3)动臂优先,动臂与其他动作同时进行时,动臂的动作将优先保证。 (4)回转优先,回转与斗杆同时动作时,回转将优先保证。 (5)负流量控制,给主泵提供一个负流量信号,使阀杆在中位时,主泵排量变为最小。 (6)直线行走,当挖掘机前进或后退时可同时作其他动作,以保证特殊工况的需要。 (7)可配置电传感器,以满足电控的需要。 (A)液压系统符号
图中下面油口中,两个P1分别与两个主泵的出油口相接,是主进油口P2~口P3用油管连接,作为斗杆合流时的辅助进油。 b口与上面b口(左罗辑阀出口)用油管连接。 C口与动臂阀伺服油a1口相连,作为动臂合流的信号。 R口是主回油,接液压油散热器,然后回油箱。 a口与上面a口(右罗辑阀出口)用油管连接。 Py1和Py2与左,右行走操纵阀(脚踏阀)的出油连接,使行走增压。 上面油口fL和fR分别与两个主泵的负流量控制接口相接。 G口作为信号输出可作他用,如接压力传感器等。 当各阀杆在中立位置时(无操作时),左路P1通过三组阀后,推开罗辑阀2,经过负流量阀3进入回油道,从主回油口R回油箱。右路P1通过四组阀后,推开罗辑阀,经过负流量阀进入回油道,从主回油口R回油箱。 此时,两个负流量阀接口fL和fR分别有压力信号输出到主泵的调节器,使主泵排量减小。这是阀杆全部处于中立位置时油的流向。如果阀杆移动将有下面的情况。 1.回转阀(左片下面)移动时,假设a1口进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A1口,油从A1口流出进入回转马达。由回转马达流回的油经B1口从该阀的回油口流入回油道。此时,这一路油被引入执行元件回转马达而使挖掘机回转,上面的两组阀没有油通过,所以,负流量输出口fL没有压力输出,主油泵排量变大。 2.斗杆阀(左片中间一组)移动时,假设a2进伺服油,推动阀杆向右移位,P1的中路油被切断,而旁路油推开单向阀进入A2口,油从A2口流出进入斗杆油缸大腔。由斗杆油缸小腔流回的油经B2口从该阀的回油口流入回油道。此时,这一路油被斗杆阀切断,上面的一组阀没有油通过(指到罗辑阀处没有油,经节流阀6来的并联油路的油在单向阀4处被断开)。所以,负流量输出口fL没有压力输出,主油泵排量变大。 当该阀杆向右移时,阀杆右端切断了控制油到回油道的通路(虚线,从a口来的油,即从右片阀的罗辑阀出口a经外接管道进入下面a口)。使右片阀的罗辑阀出口a被堵截,右面主泵压力油从罗辑阀心
参考文献
参考文献 [1] 同济大学,太原重型机械学院.单斗液压挖掘机[M].北京:中国建筑工业出版社,1980: 40-86,264-274. [2] 金海薇. 液压挖掘机反铲工作装置CAD/CAM研究[D].沈阳:辽宁工程技术大学,2001 [3] 刘本学.液压挖掘机反铲工作装置的有限元分析[D].西安:长安大学,2003,2 [4] 高衡、张全根主编.液压挖掘机[M].北京:中国建筑工业出版社,1981.8,74 -75 [5] 成大先主编.机械设计手册. 连接与紧固[M].北京:化学工业出版社,2004.1 [6] 胡传鼎 编著. 机械制图画法范例[M].北京:化学工业出版社,2005.1,221-227 [7] 杨晓辉主编. 简明机械实用手册[M].北京:科学出版社,2006.8,680-689 [8] 范厚军主编.紧固件手册[M].南昌:江西科学出版社,2004.1,357-640 [9] 机械设计手册编委会.机械设计手册第一卷[M].北京:机械工业出版社,2004.8,2-14-2-25 [10] 吴宗泽. 机械设计师手册. 北京:机械工业出版社,2002 [11] 庄宗元. AutoCAD 2000 使用教程. 徐州:中国矿业大学出版社,2000 [12] 张树森. 机械制造工程学. 沈阳:东北大学出版社,2001 [13] 李宜民,王慕龄,宫能平. 理论力学. 徐州:中国矿业大学出版社,1996 [14] 单辉祖. 材料力学. 北京:高等教育出版社,2004 [15] 甘永立. 几何量公差与检测. 上海:上海科学技术出版社,2001 [16] 丁玉兰. 人机工程学. 北京:北京理工大学出版社,2000 [17] 项占琴,王家平.现代机电产品设计. 杭州:浙江大学出版社,1999 [18] 中国矿业大学机械制图教材编写组.画法几何及机械制图. 徐州:中国矿业大学出版社, 2002 [19] 王洪欣,李木,刘秉忠. 机械设计工程学. 徐州:中国矿业大学出版社,2001 [20] 白杰平,伍峰,潘英. 机械工程科技英语. 徐州:中国矿业大学出版社,2001 [21] 江耕华等. 机械传动设计手册. 北京: 煤炭工业出版社, 1992 [22] 刘鸿文. 材料力学. 北京: 高等教育出版社, 2004 [23] 程志红. 机械设计. 南京: 东南大学出版社, 2006 [24] 中国机械工程学会. 中国机械设计大典(1-5册). 南昌: 江西科学技术出版社, 2002 [25] 王红彬.国外液压挖掘机新技术发展动向.国外工程机械.1993.19 中国矿业大学徐海 学院2012届本科生毕业设计89 [26] 章崇焕.国外大型矿用挖掘机的最新发展.矿山机械.1993 [27] 张建宗.浅谈液压挖掘机的节能技术及发展趋势.矿山机械.2001.8 [28] 陈正利.我国液压挖掘机发展的几个重要阶段及其前景展望.建筑机械.1999. [29] 王宗君.加速挖掘机改进创新促进挖掘机生产企业的振兴和发展.建筑机械,1998.5 [30] 张铁.《液压挖掘机结构原理及使用》.石油大学出版社.2002 [31] 黄宗益.《液压挖掘机液压系统概述》.建筑机械化.2003.9 [32] 左健民主编.液压与气压传动(2版).北京:机械工业出版社.1999.5 [33] 黄宗益.液压挖掘机分析工况控制.建筑机械,1998 [34] 郭建瑞等.单斗液压挖掘机系列主参数规律的研究.《工程机械》1994 [35] 李建启.负载传感系统压力补偿方案的分析比较.液压气动与密封,1992.3 [36] 赵建.降低液压系统能耗的有效途径.液压与气动,2000.5: 1-3 [37] 范春行.压力补偿及负载传感变量泵.液压与气动,1993.5: 20-22 [38] 陈世教等《川崎KMX15R挖掘机多路阀的功能与结构》建筑机械,1999.6 [39] 叶伟等《挖掘机工作装置液压操纵回路(一)》建筑机械.2003. [40] 官忠范主编.《液压传动系统》.机械工业出版社.1997 [41] 李福义.《液压技术与液压
液压挖掘机毕业设计
摘要 液压挖掘机是一种多功能的工程机械,通常用于挖掘、倾倒、表面处理、提升及其他工作。然而,液压挖掘机的驾驶者必须有多年训练经验才能工作起来又快又娴熟。每个液压挖掘机有三个铰接件:动臂、斗杆和铲斗。操纵者只有两只手,所以,对于初学习者来说同时精确控制三个铰接件并不是一件容易的事。此外,驾驶者必须在各种危险的环境下,有时甚至得在尘土非常多的环境下工作,这对于他们的健康将有非常大的危害。因为这些原因,研究液压挖掘机的自动化对于提高生产力,生产效率和安全是很有必要的,目前,挖掘机的自动化研究已在各地广泛进行。在所有的被用作发展复杂多变任务的基础的基本元素中,挖掘机动力臂控制目前是最重要最基本方面,挖掘机自动化过程中存在以下问题:机械结构中的变量参数、各种非线性液压执行机构和地面的扰动。为了解决这些问题,已经进行了许多研究,这些研究要么按照基于规则的研究分类要么按照基于研究的模型分类。本设计提出了一种不连续检验,它是基于接近非线性增益系数的自适应鲁棒控制器以及整个系统的非线性,误差处理是通过鲁棒控制器的反馈和鲁棒控制器的设计,最后,臂的运动控制实验被用来证明此方案的可行性。
目录 一、项目实施的目的与要求 (4) 二、项目报告的内容 (5) (一)项目背景及其意义 (5) (二)项目国内发展现状 (6) (三)项目分析及其技术要求 (6) 1、项目原理分析 (7) 2、项目方案制定 (8) 四、项目设计步骤 (10) 五、项目成果实物图 (13) 六、设计课题收获及感受 (14)
一、项目实施的目的与要求 目的: 液压传动课程作业是本课程的一个综合实践教学环节,通过该教学环节,要求达到以下三个目的: (1)巩固和深化液压的理论知识,掌握液压系统设计计算的一般方法和步 骤; (2)能正确合理地确定执行元件,选用标准液压元件;能熟练地运用液压基本回路组合成满足基本性能要求的、高效率的液压系统; (3)熟悉并会运用有关的国家标准、部颁标准、设计手册和产品样本等技术资料。 要求: (1)设计时必须从实际出发,总和考虑实用性、经济性、安全性及操作方便和结构简单。多设想几个方案进行分析对比后确定最理想的一个; (2)独立完成作业。设计时可以参考同类机械,但必须在深入理解和消化后借鉴,不要简单地抄袭; (3)在完成课程作业的过程中,要随时复习液压元件的工作原理、基本回路几典型液压系统的实例,积极思考,认真完成; (4)在完成课程作业的过程中,希望大家注意深化和扩大自己的知识面,培养独立的工作能力,使自己解决工程问题的能力有所提高。