三相异步电动机的设计计算
Equation Chapter 2 Section 1.
题目:Y160-M4型三相异步电动机设计
姓名 ___ __ _ __
学号_ __ __
年级 ____ _
专业 _电气工程及其自动化
目录
目录 ......................................................................................................................................... I 摘要 ..............................................................................................................................................II 第一章异步电动机的概述 . (1)
1.1异步电动机的用途及分类 (1)
1-2.定子的结构组成及工作原理 (1)
1.3电机设计的过程 (2)
1.4异步电动机主要性能指标 (3)
第二章电机设计计算准备 (4)
2.1电机主要尺寸,绕组构成和原理 (4)
2.2主磁路 (5)
2.3电抗 (6)
2.4损耗与效率 (7)
2.5通风散热 (8)
2.6电机设计要求 (8)
第三章电机设计计算程序 (11)
3.1额定数据和主要尺寸 .............................................................................. 错误!未定义书签。
3.2磁路计算 .................................................................................................. 错误!未定义书签。
3.3参数的计算 .............................................................................................. 错误!未定义书签。
3.4启动性能的计算 ...................................................................................... 错误!未定义书签。
3.5电机设计的分析比较 .............................................................................. 错误!未定义书签。第四章总结 . (36)
参考文献 (37)
摘要
三相异步电动机又称为三相感应电动机。感应电动机是基于气隙旋转磁场与转子绕组中感应电流相互作用产生电磁转矩,从而实现能量转换的一种交流电动机。由于转子绕组电流是感应产生的,因此称为感应电动机。与其它电动机相比,感应电动机具有结构简单,制造、使用、维护方便,运行可靠及重量轻成本低等优点。此外,感应电动机还还便于派生各防护型式以使用不同环境条件的需要,也有较高的效率和较好的工作特性。由于感应电动机具有上述许多优点,它是工业领域中应用最广泛。在中小型轧钢设备、矿山机械、机床、起重运输机械、鼓风机、水泵和农副产品加工机械大多采用三相异步电动机来拖动。
三相异步电动机转子的转速低于旋转磁场的转速,转子绕组因与磁场间存在着相对运动而感生电动势和电流,并与磁场相互作用产生电磁转矩,实现能量变换。
相比于单相异步电动机,三相异步电动机运行性能好,并可节省各种材料。按转子结构的不同,三相异步电动机可分为笼式和绕线式两种。笼式转子的异步电动机结构简单、运行可靠、重量轻、价格便宜,得到了广泛的应用,其主要缺点是调速困难。绕线式三相异步电动机的转子和定子一样也设置了三相绕组并通过滑环、电刷与外部变阻器连接。调节变阻器电阻可以改善电动机的起动性能和调节电动机的转速。
关键词:三相异步电机感应电动机电机设计
第一章异步电动机的概述
1.1异步电动机的用途及分类
根据电机的可逆原理,异步电机既可用作电动机,也可用作发电机。但其作发电机运行时性能较差,故很少采用。而用作电动机时具有较好的工作特性,故其主要用作电动机。异步电动机结构简单,价格低廉,运行可靠,坚固耐用,易于控制,因而是电动机中应用得最为广泛的一种。异步电动机是一种交流电机,主要用作电动机,拖动各种生产机械,广泛应用于交通运输、农业生产以及国防、文教、医疗和日常生活中。
异步电动机具有较高的运行效率和较好的工作特性,从空载到满载范围内接近恒速运行,能满足大多数工农业生产机械的传动要求。异步电动机还便于派生成各种防护型式,以适应不同环境条件的需要。随着电力电子器件以及交流变频调速技术的发展,由异步电动机和变频调速器组成的交流调速系统的调速性能以及经济性已可与直流调速系统相媲美,且使用维护简便,因而应用愈来愈广泛。
由于异步电动机在运行过程中必须从电网吸收感性无功功率,因此其功率因素较差,总是小于1,此外,异步电动机空载电流大,起动和调速性能都不够理想,是异步电机的主要缺点[2]。
异步电动机的种类很多,从不同的角度考虑,有不同的分类方法。
按照相数来分,有单相异步电动机,三相异步电动机。大功率机械拖动时,一般都用三相异步电动机,日常生活和工业控制装置则多用单相异步电动机。
按转子结构分,有鼠笼试异步电动机和绕线式异步电动机两种,其中,鼠笼式异步电动机,又包括单鼠笼式异步电动机、双鼠笼式异步电动机和深槽式异步电动机。
按机壳的保护方式分,有防护式异步电动机、封闭式异步电动机,以及防爆式异步电动机[3]。
1-2.定子的结构组成及工作原理
三相异步电动机由定子和转子两个基本部分构成。转子按其结构可分为鼠笼型和绕线型两种。
定子由定子铁心、机座、定子绕组等部分组成,定子铁心是异步电动机磁路的一部分,一般由0.5毫米厚的硅钢片叠压而成,用压圈及扣片固紧,各片之间相互绝缘,以减少涡流损耗。
定子绕组是由带有绝缘的铝导线或铜导线绕制而成的,小型电机采用散下线
圈或称软绕组,大中型电机采用成型线圈,又称为硬绕组。
转子由转子铁心、转子绕组、转子支架、转轴和风扇等部分组成,转子铁心和定子铁心一样,也是由0.5毫米硅钢片叠压而成。鼠笼型转子的绕组是由安放在转子铁心槽内的裸导条和两端的环形端环连接而成,如果去掉转子铁心,绕组的形状象一个笼子;绕线型转子的绕组与定子绕组相似,做成三相绕组,在内部星型或三角型。
当定子绕组接至三相对称电源时,流入定子绕组的三相对称电流,在气隙内产生一个以同步转速n
1
旋转的定子旋转磁场,设旋转磁场的转向为逆时针,当旋
转磁场的磁力线切割转子导体时,将在导体内产生感应电动势e
2
,电动势的方向根据右手定则确定。N极下的电动势方向用⊕表示,S极下的电动势用⊙表示,
转子电流的有功分量i
2a 与e
2
同相位,所以⊕和⊙既表示电动势的方向,又表示
电流有功分量的方向。转子电流有功分量与气隙旋转磁场相互作用产生电磁力
f
em
,根据左手定则,在N极下的所有电流方向为⊕的导体和在S极下所有电流流
向为⊙的导体均产生沿着逆时针方向的切向电磁力f
em
,在该电磁力作用下,使转
子受到了逆时针方向的电磁转矩M
em
的驱动作用,转子将沿着旋转磁场相同的方向转动。驱动转子的电磁转矩与转子轴端拖动的生产机械的制动转矩相平衡,转子将以恒速n拖动生产机械稳定运行,从而实现了电能与机械能之间的能量转换,这就是异步电动机的基本工作原理。
1.3电机设计的过程
按照一般工业界的编程电机设计的过程可分为三个阶段:准备阶段、电磁设计与结构设计。
准备阶段:通常抱过两方便内容:首先是熟悉国家标准,收集相近电机的产品样本和技术资料,并听取生产和使用单位的意见与要求;然后在国家标准有关规定及分析相应资料的基础上,编制技术任务或技术建议书。
电磁设计:本阶段的任务是跟据技术任务书的规定,参相生产实践经验,通过计算和方案比较,来确定与所设计电机电磁性有关的尺寸和数据,选定有关材料,并核算电磁性能。
结构设计:结构设计的任务是确定电机的机械结构,零部件尺寸,加工要求与材料的规格及性能要求,包括必要的机械计算及通风和升温计算。
1.4异步电动机主要性能指标
异步电动机性能指标有:
(1)效率:电动机输出机械功率与输入电功率之比。
(2)功率因素:电动机输入有效功率与视在功率之比。
(3)起动电流:电动机在额定电压、额定频率和转子起动时从供电回路输入的最大稳态方均根电流。
(4)起动转矩:电动机在额定电压、额定频率和转子起动时说产生的转矩的最小测得值。
(5)最小转矩:电动机在额定电压、额定频率下,在零转速与对应于最大转矩的转速之间所产生的稳态异步转矩的最小值。
(6)最大转矩:电动机在额定电压、额定频率下说能产生的最大稳态异步转矩。
(7)噪声:电动机在空载稳态运行时A计权声功率级(dB),以及在额定负载运行是时超过空载运行的噪声声功率级增量。
(8)振动;电动机在空载稳态运行时振动速率有效值。
第二章 电机设计计算准备
首先应根据产品通用标准、技术条件设计原始数据,然后进行电磁设计和结构设计。电磁设计是根据设计技术要求确定电机的电磁负荷,计算转子、定子冲片和铁心各部分尺寸及绕组数据,进而核算电机各项参数及性能,并对设计数据做必要的调整,直到达到要求,提出电磁设计单。结构设计是根据设计技术要求及电磁设计确定的有关数据,确定电机总体结构、零部件尺寸、材料及加工要求,绘制总装图及零部件图,进行必要的机械计算及热计算,提出全套生产图样。
电机设计要进行多种方案的分析、比较,或采用优化设计方法,以权衡电机性能、运行费用、制造成本、运行可靠性等因素,决定最优的设计。中小型电机生产量大,使用面广,品种规格繁多,一般都成系列设计及制造。设计时,应充分考虑到标准化、通用化、系列化的要求。
2.1电机主要尺寸,绕组构成和原理
主要尺寸指定子铁心外径1D 、内径1i D 以及铁心长度。在已知电机的视在功率及转速情况下,可借助利用系数的经验值或通过适当地选择电磁负荷,由式(2.1)计算的21i ef D l 分别求得主要尺寸1i D 与ef l 。参照定子内外径比的经验值可估算定子外径1D 。
21ef '
N 6.1
p Nm dq D l n P K K AB δ
α= (2.1)
对应于系列电机的每一机座中心高,根据合理利用机座径向空间及考虑硅钢片的合理套裁等要求,确定合理的定子冲片外径1D 。设计时按1D 估算值或直接按电机功率及转速,选定某一中心高的机座及与之相适应的外径。
电机绕组要求各并联支路具有相同的电动势及阻抗。三相交流绕组要求各相相轴在空间互差0120电角度,并有相同的有效匝数,以保正各相电动势对称(即大小相等、相位互差0120电角度)。同时要求绕组感应电动势和产生磁动势的基波分量尽可能大,而谐波分量尽可能小。
交流绕组有多种分类方法,按绕组布置分类,有集中绕组及分布绕组;按相带分类,有0120、060、030相带绕组及混相绕组;按每极每相槽数q 分类,有整数槽绕组及分数槽绕组(q 为整数或分数);按槽内线圈边层数分类,有单层绕组、双层绕组及单双层绕组;按线圈形状和端部连接方式分类,有叠绕组、波绕组以及同心式、链式、交叉式绕组。
直流电枢绕组一般按绕组元件与换向片之间连接规律不同而分为叠绕组、波绕组和蛙绕组。绕组由多个按一定规律连接的线圈构成,每一线圈包括置于于槽中的有效部分及端接部分。若各相带的某些槽的线圈有规则地改属另一相,即为混相绕组。
双层绕组每槽分上下两层放两个线圈边,双层绕组所有线圈的形状、几何尺寸相同,端部排列整齐,可选择有利节距以改善电动势和磁动势波形。
2.2主磁路
空载气隙磁场在直流电机和同步电机中由磁极绕组的直流励磁磁动势建立,而在异步电机中则由定子绕组的交流磁动势建立。
直流电机主极极弧形状通常可分为以下三种: (1)均匀气隙;
(2)偏心气隙,极弧与电枢外圆不同心,使气隙从中心至极尖逐渐增大; (3)极尖削角的均匀气隙,气隙从极弧两端约1/6长度处至极尖逐渐增大。后两种电枢形状可抑制电枢反应所引起的气隙磁场畸变。
凸极同步电机的磁极极弧形状大致有两种:
(1)沿极弧范围内气隙是变化的,得到接近正弦的磁场分布; (2)气隙均匀,得到近似矩形的磁场分布。
磁路计算是按给定的电机端电压求得每极磁通,进而求取磁路各部分磁通密度(磁密)和磁位降,计算所需的磁动势、励磁电流以及空载特性。磁路计算方法的 依据是全电流定律,即总磁动势为磁场强度的线积分。实际计算是通过求各段磁路,如气隙、齿、轭、极身等部分磁位降的总和代替积分求得总磁动势。
气隙的一边或两边有齿和槽,因此,实际的气隙磁密分布是不均匀的,气隙磁位降较假定气隙光滑时的大,它的影响用气隙系数k δ对气隙长度δ加以修正,设齿宽为t,槽口宽为0b ,则气隙系数
t
k t δγδ
=
- (2.2)
式中 γ——对开口槽,2
002/5b b γδδ????=+ ? ????
?
; 对半闭口或半开口槽,2
002/[4.40.75]b b γδ
δ????=+ ? ?????
径向通风道使磁通通过气隙的轴向长度减小,计算气隙磁密时的实际长度为铁心的有效长度ef t v v v l l k N b =-,式中t l 为铁心总长,v N 及v b 为通风道数及其宽度, /(5/)
v v v b k b δ
δ=
+。
如定转子均有通风道,两者交错时应分别考虑;两者对齐且相等时,v k 式中应以2v b 代替v b 。
沿齿部磁路不同位置的齿宽t b 一般是变化的,不同截面处磁密及磁场强度是不同的。计算齿磁位降时,沿齿高分段越多,计算结果也越准确。实际计算时常加以简化,取靠近齿部最窄的1/3齿高处的磁场强度为t H 。若齿宽不连续变化,则应在不连续处分段计算。
根据不同电机的磁路结构,由各部分磁位降之和求取所需的励磁磁动势。 隐极同步电机及异步电机
1122t j t j F F F F F F δ=++++
(2.3)
式(2.3)中,tc F 为主极补偿齿磁位降,j F δ为磁极装配间隙磁位降。对直流励磁的电机,励磁绕组匝数为f W 时,空载励磁电流F
If Wf
=(A )对异步电动机,励磁电流
2m dp
pF
I mWK π
=
(A )
(2.4)
2.3电抗
与初、次级交链的基波互感主磁通在绕组中感应电动势,直接参与能量转换,与基波主磁场相对应的电抗称为主电抗。多相交流绕组的每相主电抗
2
0ef
's ef
()4()dp m WK f l Xm p K μτπδ=?Ω
(2.5)
式中:'s K ——电机磁路总磁位降与气隙磁位降之比;
0μ——气隙磁导率。
对异步电机,主电抗即为励磁电抗;对同步电机,主电抗为电枢反应电抗。
/N N U I 为基准值的主电抗标么值
0*'2dp m
s ef
K A X K B δ
μτ
πδ=
?
(2.6)
从上式可知,主电抗与
A
B δ
成正比,而气隙长度增大,则主电抗减小。 漏磁通是绕组产生总磁通的一部分,一般只与初、次级中一侧交链,不参与能量转换。它能在绕组中感应电动势,该电动势频率与产生该磁通的电流频率相同,通常用漏抗压降表示,因而每种漏抗都与某一部分漏磁通相对应,相应的有槽漏抗、端部漏抗、齿端漏抗。设计中常把某种与初、次级都交链的互感磁通也归入漏抗,如谐波漏抗。
不同的漏抗有不同的来源。例如槽漏抗由横向穿过槽壁的漏磁通引起;端部漏抗由端部漏磁通引起,与绕组端部结构及尺寸有关,端部越长,和附近的磁性金属构件越靠近,则端部漏磁导愈大。
齿端漏抗是由齿端漏磁通引起,它是从一个齿顶出发,沿气隙到相邻的另一个齿顶的漏磁通,齿端漏抗随槽口宽度与气隙长度比值的增大而减小。对气隙较小的电机,如异步电机可忽略齿端漏抗。谐波漏抗由气隙中高次谐波磁通引起。有时把谐波漏抗划分为齿谐波漏抗及相带谐波漏抗。
2.4损耗与效率
损耗包括铜耗、铁耗、铜耗、风摩损耗和杂散损耗等。其中铜耗是电流流过绕组产生的焦耳热损耗,按我国标准规定绕组电阻应折算到与绕组绝缘等级相对应的基准工作温度。若电流通过电刷与集电环或换向器,则应包括电刷接触损耗。对直流电机,除电枢绕组的电阻损耗外,还应包括与之串联的换向极绕组及补偿绕组的电阻损耗。对带励磁绕组的同步电机或直流电机,应计入励磁绕组的电阻损耗。
基本铁损耗是铁心中主磁通交变引起磁滞及涡流损耗。计算时应分别计算定子或电枢铁心的齿、轭部铁损耗,然后相加。正常运行时,同步电机的磁极主磁通不变,异步电机转子的磁通变化频率也很低,基本铁耗均可忽略。
风摩损耗包括风扇及通风系统的损耗,电机转子表面与冷却介质的摩擦损耗、轴承摩擦损耗、电刷摩擦损耗等。
杂散损耗包括表面损耗和脉振损耗。前者是由气隙谐波磁通相对与齿或磁极铁心表面移动而在其表面产生的涡流损耗;后者是该谐波磁通相对于齿移动,使进入齿中的谐波磁通脉动,因而在齿中产生的涡流及磁滞损耗。
效率由输出功率2P 及在该功率下各种损耗总和P ∑求得
2
1P P P
η=-
+∑∑ (2.7)
一般考核在额定输出功率N P 下的额定效率,当电机运行在不变损耗和可变损耗相等的负载时,电机运行效率最高。
2.5通风散热
电机冷却过程是把电机损耗产生的热量首先传递给一次冷却介质,已升高温度的一次冷却介质,由新的低温冷却介质不断替换,或者通过某种形式的冷却器由二次冷却介质加以冷却。常用冷却方式有:表面冷却、通风冷却、循环冷却、管道通风冷却等。
风扇常作为驱使冷却介质循环所需要的动力,它应能产生足够的压力以克服电机冷却通道中的压力降落,并输送足够的介质流量通过电机。常用的风扇有离心式和轴流式两种。
电机绝缘结构按其耐热性分为A 、E 、B 、F 、H 五个等级,不同耐热等级的极限温度如下表: 耐热等级
A
E B
F H 极限温度(℃) 105
120
130
155
180
电机绕组温升限值基本上取决于其绝缘结构耐热等级及环境温度,同时与温度测量方法有关,常用的方法有电阻法、温度计法及埋置检温法[4]。
2.6电机设计要求
Y 系列电动机为全封闭自扇冷式笼型三相异步电动机,是按照国际电工委员会(IEC)标准设计的,具有国际互换性的特点。用于空气中不含易燃、易炸或腐蚀性气体的场所。适用于无特殊要求的机械上,如机床、泵、风机、运输机、搅拌机、农业机械等。也用于某些需要高起动转矩的机器上,如压缩机。通用Y 系列的设计数据如表2-1所示。
表2—1 Y 系列电动机的技术数据
电动机型号
额定功率 KW
满载转速(r/min )
堵转转矩/额定转矩 最大转矩/额
定转矩
同步转速1500r/min ,4极 Y801-4
Y802-4 Y90S-4
0.55 0.75 1.1 1390 1390 1400
2.2
2.2 2.2 2.2 2.2 2.2
Y90L-4
Y100L
1
-4
Y100L
2
-4 Y112M-4 Y132S-4 Y132M-4 Y160M-4 Y160L-4 Y180M-4 Y180L-4 Y200L-4 Y225S-4
1.5
2.2
3
4
5.5
7.5
11
15
18.5
22
30
37
1400
1420
1420
1440
1440
1440
1460
1460
1470
1470
1470
1480
2.2
2.2
2.2
2.2
2.2
2.2
2.2
2.2
2.0
2.0
2.0
1.9
2.2
2.2
2.2
2.2
2.2
2.2
2.2
2.2
2.2
2.2
2.2
2.2
此外,国际电工委员会还设计的相应的安装代号,如表2-2所示。
表2—2Y系列电动机安装代号
安装型式基本安装型由B3派生安装型
B3 V5 V6 B6 B7 B8
示意图
中心高
(mm)
80~280 80~160
安装型式基本安装型由B5派生安装型基本安装型由B35派生安装型B5 V1 V3 B35 V15 V36
示意图
中心高
(mm)
80~225 80~280 80~160 80~280 80~160
综上所述,本文设计的Y160-M4型三相异步电动机基本数据如下:
额定功率P
N
=4kW(似乎没有对上,下文应当以11KW的额定功率重新计算)(若待设计电机的额定功率为4KW,Y112M-4型中心高112mm,推荐气隙为0.3mm
而非下文的0.5mm),额定相电压U
N =380V,相数m=3,额定频率f
N
=50Hz,极对
数p=2,额定转速n=1460r/min,B级绝缘,连续运行,封闭自冷式。输出功电流(相): KW
I=3.51A。下文将根据标准确定定转子铁芯主要尺寸。
由《Y系列(IP44)三相异步电动机技术条件(H80-280毫米)》(JB3074-82),待设计电机型号是Y160M-4。Y系列的这种三相异步电动机中心高H是160mm[1]。
查表知道定子外径D
1=260mm,内径D
il
=170mm。转子内径D
i2
=60mm,气隙长度
g=0.5mm。定、转子槽配合Q1/Q2为36/28,绕组形式是单层绕组【1】
第三章 电机设计计算程序
3.1额定数据和主要尺寸
1. 额定功率:KW P N 0.4=
2. 额定电压:V U U N N 380==Φ (?接)
3. 功电流:A A mU P I N N kW
51.3380
3100.43=??==Φ 4. 效率:效率标准值84.0=η
5. 功率因素:功率因素标准值82.0cos =?
6. 极对数:2=p
7. 定转子槽数
定子槽数Q 1=36 转子槽数Q 2=26 8. 定转子每极槽数 1823611===
p Q Q p 132
2622===
p Q Q p 9.确定电机电机主要尺寸 定、转子冲片尺寸
定子外径D 1 =260mm=26cm 定子内径1i D =170mm=17cm
转子外径=-=-=5.0*217*212g D D i 16cm 转子内径D i2=6cm
z s
1
R1
bs1
bs2
h s 12
b01
hs0
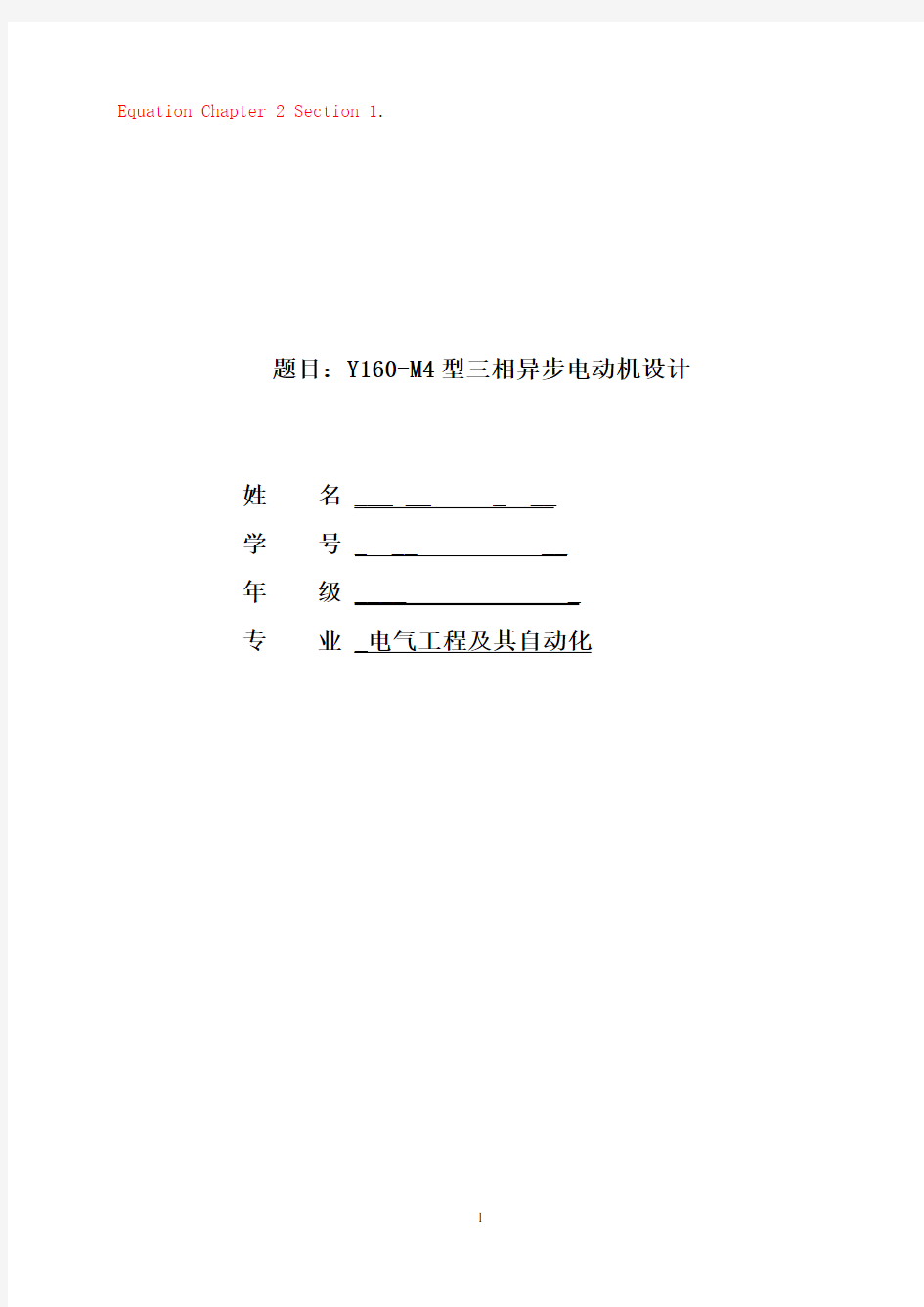
图3—1 三相异步电动机的定子槽型[1]
中小型异步电机定子槽型通常采用半闭口梨形槽。较小的槽开口可以减少铁芯表面损耗和齿部脉振损耗,并使气隙系数较小,以减小励磁电流;同时使得槽面积利用率高,冲模寿命较长;槽绝缘的弯曲程度较小,不易磨损,如图3-1所示。
定子槽尺寸有 01b =0.32cm cm h s 08.00= 301=s Z
cm b s 51.01=
cm b s 73.02= cm h s 29.112=
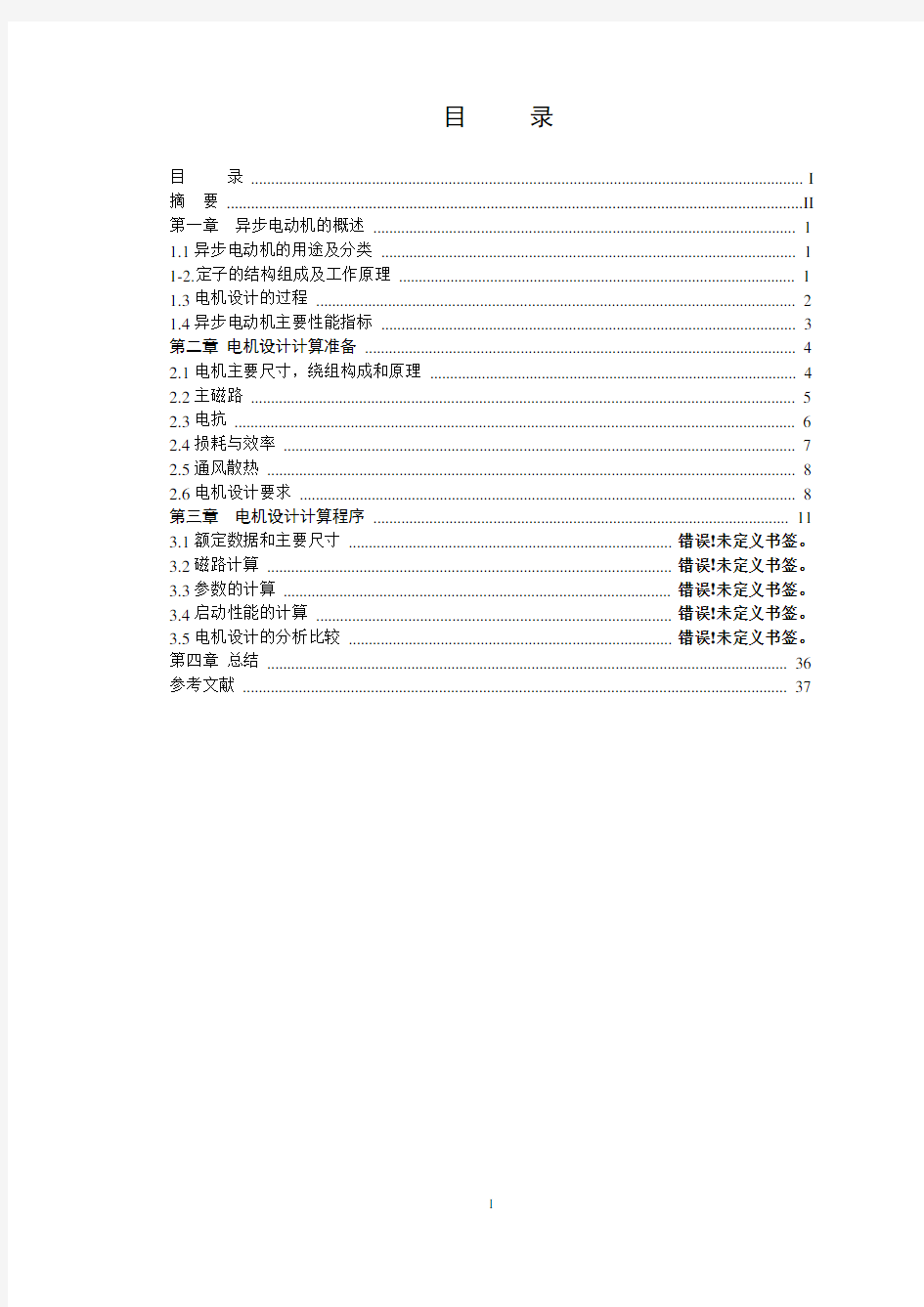
br2
br1
z s 2
hr12
b02
hr0
图3—2 三相异步电动机的转子圆底槽型[1] 转子槽尺寸有
cm b 1.002= cm h r 05.00= 302=s Z cm b r 57.01= cm b r 22.02=
cm h r 75.112=
R
H ’s
bs1
h
图3—3 槽绝缘结构示意图[1]
10.气隙的确定
气隙长度g =0.5mm=0.05cm 11.极距 cm p
D i p 70.26217
1
=?=
=
ππτ
12.定子齿距 cm Q D t i 48.136
17
1
1
1=?=
=
ππ
转子齿距 cm Q D t 93.126
16
2
2
2=?=
=ππ
13.绕组节距
定子绕组采用单层绕组,交叉式,节距1-9,2-10,18-11 故绕组节距67.73/)788(=++=y
通常,绕组节距y 的取值根据绕组的类型(单层或者双层)确定。 对于本题的单层绕组,在计算时绕组短距系数1p K 时去整数,即1p K =1.0 14.转子斜槽度
为了削弱齿谐波磁场的影响,转子采用斜槽,一般斜一个定子齿距1t , 转子斜槽度SK b 一般以与定子齿距t 1的比值来表示,转子斜槽尺寸SK B 如下: cm t b B SK SK
07.248.14.11=?=?=
15.定子绕组每槽导体数
并联支路11=a .对于单层绕组,此题每槽导体数521=Z
16. 每相串联导体数 6241
352
3611111=??==?Φa m Z Q Z 17.绕组线规设计
根据经验,一般按照类比法选取线规。当不合适时,应进行多次选取,直至所选取的线规满足效率,启动性能和满槽率的要求等。计算本例所选取的线规为0.11Φ-。 18.槽满率的计算 先计算槽面积
2
22
121885.02365.0)2.029.1(251.0365.022)(22cm R h h b R S s s s =?+-?+?=+
-?+=ππ
式中,槽楔高度按表选取的,h=0.2cm 。 对于单层绕组,槽绝缘所占面积
2
120931.0)365.029.12(025.0)
2(cm R h C S s i i =?+??=+=ππ 式中,槽绝缘厚度按表选取,cm C i 025.0=
槽满率 %59.79100
7919.008.15212
211=???=?=
?e f S d Z N S 19.铁心长
铁心有效长cm g L L eff 1.1205.02122=?+=+= 净铁心长cm L K L Fe Fe 4.111295.0=?==? 20.绕组系数
对于单层绕组,其绕组的短距系数1p K 恒等于1,即 11=p K
96.02)20sin(3)
2203sin()2sin()2sin(11=?=??= ααq q K d 其中
2036
360221=?==Q p πα
所以绕组系数 96.00.196.0111=?=?=p d dp K K K 每相有效串联导体数
3689598.0384111=?=?=ΦΦN K N dp 21.每相有效串联导体数
59996.06241111=?=?=ΦΦdp dp K Z K Z
3.2磁路的计算
22. 满载电势
设设负载电势系数初值9061.01'
'1=-=L e k ε
Wb
Wb k Z f U k dp e 58
1
18
1110175.59598.06245022.2103809061.022.210?=?????=????=
ΦΦ
通常从这里开始进行负载电势系数的循环计算,一般需要进行多次的循环。 23. 每极下齿部截面积
定子齿截面积1T S :
22114.962
364.11471.0cm p Q L b S Fe T T =??=?
?= 转子齿截面积
22220.902
264.11607.0cm p Q L b S Fe T T =??=?
?= 24.定子、转子轭部磁路计算高度 定子轭部计算高度
cm
cm R
h D D h s i C 89.23365.0735.1217263211'1=+--=+--=
转子轭部计算高度
cm
r h D D h r i C 13.3311.091.126163
22
22'2=+
--=+--=
25. 轭部导磁截面积
定子轭部导磁截面积21'195.324.1189.2cm L h S Fe C C =?=?= 转子轭部导磁截面积22'268.354.1113.3cm L h S Fe C C =?==? 26. 一极下空气隙截面积
2207.3231.1270.26cm m L S eff p g =?=?=τ 27. 波幅系数
从这里开始进行饱和系数的循环计算,一般需进行多次的循环。先假定饱和系数30.1'=T F ,则波幅系数查表为【2】 451.1=s F 28. 气隙磁密计算
2324.02.232407.32310175.5451.15
==??=?=Gs Gs S F B g s g φ
29. 定子齿部磁密:
T
Gs Gs S F B T s T 7789.03.77894.9610175.5451.15
11==??=?=φ 30.转子齿部磁密
T Gs Gs S F B T s T 8343.03.83430
.9010175.5451.15
22==??=?=φ
31. 定子轭磁密T Gs Gs S B C C 7853.08.785295.3210175.55.0215
11==??=Φ?= 32. 转子轭磁密T Gs Gs S B C C 7253.09.725168
.3510175.55.0215
22==??=Φ?= 33. 各部分磁路所需单位安匝数:
根据上述计算出的B T1、B T2、B C1、B C2,按所采用硅钢片DR510牌号的磁化曲线分别查取各部分磁路每厘米单位长度所需的安匝数 at T1和at T2即为【3】 64.271=T at 92.262=T at 0.121=C at 17.102=C at 34. 有效气隙长度
定子为半闭口槽,其卡式系数为
618
.132.0)32.075.005.04.4(48.1)
32.075.005.04.4(48.1)75.04.4()
75.04.4(2
2
01
0110111=-?+???+??=
-++=b b g t b g t K C
转子为半开口槽,其卡式系数为
0179
.11
.0)1.075.005.04.4(93.1)1.075.005.04.4(93.1)75.04.4()
75.04.4(2
2
02
0220222=-?+???+??=
-++=b b g t b g t K C
有效空气气隙长度
0823.00179.1618.105.021=??=??=C C e K K g g
35.齿部磁路计算长度 定子齿部磁路计算长度1'T h
cm
cm R h h h s s T 41.1365.031
235.1055.031211'=?++=++= 转子齿部磁路计算长度2
'T h
三相异步交流电机的设计_毕业设计
学生毕业设计(毕业论文) 系别:机电工程 专业:数控技术 设计(论文)题目:三相异步交流电机
毕业设计(论文)任务书 一、课题名称:三相异步电机的设计 二、主要技术指标: 1.内部由定子和转子构成。 2. 外壳有机座、端盖、轴承盖、接线盒、吊环等组成。 3. 技术要求:采用电压AC380,可以实现正反转。 三、工作内容和要求: 1.设计磁路部分:定子铁心和转子铁心。 2 设计电路部分:定子绕组和转子绕组以及电路图。 3 设计机械部分:机座、端子、轴和轴承等。 4.设计电路的正反转和安全控制部分。 5.按照“毕业设计规格”设计毕业报告。 四、主要参考文献: 1.[1]王世琨.《图解电工入门》[M].中国电力出版社.2008.
2.[2]满永奎.《电工学》[M].清华大学出版社.2008. 3.[3]乔长君.《电机绕组接线图册》[M].化学工业出版社.2012. 4.百度文库 学生(签名)年月日 指导教师(签名)年月日 教研室主任(签名)年月日 系主任(签名)年月日
毕业设计(论文)开题报告
摘要
在费拉里斯和特斯拉发明多相交流系统后,19世纪80年代中期,多沃罗沃尔斯基发明了三相异步电机,异步电机无需电刷和换向器三相异步电机(Triple-phase asynchronous motor)是靠同时接入380V三相交流电源(相位差120度)供电的一类电动机,由于三相异步电机的转子与定子旋转磁场以相同的方向、不同的转速成旋转,存在转差率,所以叫三相异步电机。 作电动机运行的三相异步电机。三相异步电动机转子的转速低于旋转磁场的转速,转子绕组因与磁场间存在着相对运动而感生电动势和电流,并与磁场相互作用产生电磁转矩,实现能量变换。与单相异步电动机相比,三相异步电动机运行性能好,并可节省各种材料。按转子结构的不同,三相异步电动机可分为笼式和绕线式两种。笼式转子的异步电动机结构简单、运行可靠、重量轻、价格便宜,得到了广泛的应用。 Reese and Tesla invented in AC system. At the mid of 1880s, 多沃罗沃尔Chomsky invented the three-phase asynchronous motors, asynchronous motors without brushes and commutate. Three-phase asynchronous motors (Triple-phase asynchronous motor) is by simultaneously accessing 380V three-phase AC power supply of a class of motors, three-phase asynchronous motor as the rotor and the stator rotating in the same direction, to rotate at different speeds, there turn slip, so called three-phase asynchronous motors. For three-phase asynchronous motors motor is running. Three-phase asynchronous motor rotor speed is lower than the speed of the rotating magnetic field, the magnetic field due to the rotor windings relative motion exists between the induced electromotive force and current, and the magnetic field generated by the interaction with the electromagnetic torque and achieve energy conversion. Compared with single-phase induction motor, Three- phase asynchronous motor running properties, and save a variety of materials. According to the different structure of the rotor, three-phase cage induction motor and the winding can be divided into two kinds. Cage rotor induction motor, simple structure, reliable operation, light weight, cheap, has been widely used
三相异步电动机基本控制线路的安装与调试
三相异步电动机基本控制线路的安装与调试 任务1-1 三相异步电动机的单向运行控制 学习内容: 1、常用低压电器的基本结构、工作原理、图形符号和文字符号、主要技术参数及其应用; 2、三相异步电动机的启/停、点动/长动控制。 学习目标: 1、知道:常用低压电器的工作原理、图形符号和文字符号;常用低压电器的用途。 2、能根据控制要求正确选择低压电器。 3、了解:常用低压电器的基本结构;主要技术参数。 4、掌握三相异步电动机的启/停、点动/长动控制电路的原理。 学习重点:工作原理、图形符号、文字符号、选择使用。 学习难点:工作原理、选择使用 §1-1 机床电气控制中常用的低压电器 目标任务: 1、了解低压电器的基本知识,熟悉常用的低压电器种类; 2、熟悉常用的各种低压电器的结构及原理、符号、选用; 3、熟练掌握常用低压电器的使用。 相关知识: 1-1. 低压电器基本知识
凡是对电能的生产、输送、分配和应用能起到切换、控制、调节、检测以及保护等作用的电工器械,均称为电器。低压电器通常是指在交流1200V及以下、直流1500V及以下的电路中使用的电器。机床电气控制线路中使用的电器多数属于低压电器。 一、低压电器的分类 低压电器是指工作在交流电压1200V 、直流电压1500V 以下的各种电器。生产机械上大多用低压电器。低压电器种类繁多,按其结构、用途及所控制对象的不同,可以有不同的分类方式。 1 .按用途和控制对象不同,可将低压电器分为配电电器和控制电器。 用于电能的输送和分配的电器称为低压配电电器,这类电器包括刀开关、转换开关、空气断路器和熔断器等。用于各种控制电路和控制系统的电器称为控制电器,这类电器包括接触器、起动器和各种控制继电器等。 2 .按操作方式不同,可将低压电器分为自动电器和手动电器。 通过电器本身参数变化或外来信号(如电、磁、光、热等)自动完成接通、分断、起动、反向和停止等动作的电器称为自动电器。常用的自动电器有接触器、继电器等。 通过人力直接操作来完成接通、分断、起动、反向和停止等动作的电器称为手动电器。常用的手动电器有刀开关、转换开关和主令电器等。 3 .按工作原理可分为电磁式电器和非电量控制电器 电磁式电器是依据电磁感应原理来工作的电器,如接触器、各类电磁式继电器等。非电量控制电器的工作是靠外力或某种非电量的变化而动作的电器,如行程开关、速度继电器等。 二、低压电器的作用 控制作用、保护作用、测量作用、调节作用、指示作用、转换作用 三、低压电器的基本结构 电磁式低压电器大都有两个主要组成部分,即:感测部分──电磁机构和执行部分──触头系统。 1 .电磁机构 电磁机构的主要作用是将电磁能量转换成机械能量,带动触头动作,从而完成接通或分断电路的功能。 电磁机构由吸引线圈、铁心和衔铁 3 个基本部分组成。常用的电磁机构如图所示,可分为 3 种形式。 2. 直流电磁铁和交流电磁铁
三相异步电动机型号参数表
三相异步电动机型号参数表 Y2系列电动机是Y系列电机的更新换代产品,是一般用途的全封闭自扇冷式鼠笼型三相异步电动机。该产品应用于国民经济各个领域,如机床、水泵、风机、压缩机,也可适用于运输、搅拌、印刷、农机、食品等各类不含易燃、易爆或腐蚀性气体的场合。 Y2系列电机的安装尺寸和功率等级符合IEC标准,其外壳防护等级为IP54,冷却方法为IC41l,连续工作制(S1)。 采用F级绝缘,温升按B级考核(除315L2-2、4,355全部规格按F级考核外),并要求考核负载噪声指标。 Y2系列电动机额定电压为380V,额定频率为50Hz。电动机运行地点的海拔不超过1000m;环境空气温度随季节变化,但不超过40℃;最低环境空气温度为-15℃;最湿月月平均最高相对湿度为90%;同时该月月平均最低温度不高于25℃。 Y2系列电动机有两种设计,一种是适用于一般机械配套和出口需要,在轻载时有较高效率,在实际运行中有较佳节能效果,且具有较高堵转转矩,此设计称为Y2-Y系列。中心高63~355mm,功率从0.12~315kW。电动机符合JB/T8680.1-1998 Y2系列(1P54)三相异步电动机(机座号63~355)技术条件。 型号含义:如Y2-200L1-2Y:“Y2”表示异步电动机第二次改型设计,“200”表示中心高,“L”表示机座长短号,“1”表示铁心长度序号,“2”表示极数,“Y”表示第一种设计。第2种设计是满载时有较高效率,更适用于长期运行和负载率较高的使用场合,如水泵、风机配套,此设计称为Y2-E系列,中心高80~280mm,功率从0.55~90kW。电动机符合 JB/T8680.2-1998 Y2系列(1P54)三相异步电动机(机座号80~280)技术条件。 型号含义:如Y2-200L2-6E:“Y2”表示异步电动机第二次改型设计,“200”表示中心高,“L”表示机座长短号,“2”表示铁心长度序号,“6”表示极数,“E”表示第二种设计。 Y2系列电动机机座外轮廓呈四方形兼圆形,散热片呈垂直,水平平行分布,全部采用铸铁结构。另外H63~112还兼有铝合金压铸结构。 本系列电动机采用浅端盖结构,增加了内部加强筋的数量和尺寸,全部采用铸铁结构,另外H63~112还兼有铝合金压铸结构。为方便用户使用和检修,H180及以上增设了不停机的注油装置。 接线盒防护等级为IP55。为了减轻电机重量,H63~280接线盒用铝合金压铸(也可用铸铁件),H315~355使用铸铁件。且盒内设有专用的接地装置,H160及以上机座考虑有热保护装置的安装位置,电源进线孔采用双孔进线,并有两种密封结构:一种为加密封盖,另一种为锁紧密封。接线盒一般位于机座顶部,并可以四面出线,另外H80~355铸铁机座的接 1
Y2-160M1-2三相异步电动机电磁设计解读
目录 摘要 ..................................................................... I Abstract................................................................. II 第一章绪论........................................................ - 4 - 1.1 工程背景...................................................... - 4 - 1.2 该课题设计的主要内容.......................................... - 4 - 第二章三相异步电动机................................................ - 6 - 2.1 三相异步电动机结构............................................ - 6 - 2.1.1 异步电动机的定子结构..................................... - 7 - 2.1.2 异步电动机的转子结构..................................... - 8 - 2.1.3 三相异步电动机接线图..................................... - 8 - 2.2 三相异步电动机工作原理........................................ - 9 - 2.3 三相异步电动机的机械特性和工作特性........................... - 12 - 第三章三相异步电机电磁设计......................................... - 14 - 3.1 主要尺寸和空气隙的确定....................................... - 14 - 3.2 定子绕组与铁芯设计........................................... - 14 - 3.2.1 定子绕组型式和节距的选择................................ - 15 - 3.2.2 定子冲片的设计.......................................... - 16 - 3.3 额定数据及主要尺寸........................................... - 17 - 3.4 磁路计算..................................................... - 19 - 3.5 性能计算..................................................... - 22 - 3.5.1 工作性能计算............................................ - 22 - 3.5.2 起动性能计算............................................ - 26 - 第四章电机转动轴的工艺分析......................................... - 28 - 4.1 转动轴的加工工艺分析......................................... - 28 - 4.2 选择设备和加工工序........................................... - 30 - 4.3 成品的最后工序............................................... - 31 - 小结与致谢........................................................... - 32 - 参考文献............................................................. - 33 -
高压中大型三相异步电机基本知识
三相异步电动机基本知识 1电机概述 电机的型式很多,但其工作原理都基于电磁感应定律和电磁力定律。因此,电机构造的一般原则是:用适当的有效材料(导磁和导电材料)构成能互相进行电磁感应的磁路和电路,以产生电磁功率和电磁转矩,达到转换能量形态的目的。 为了减少激磁电流和旋转磁场在铁心中产生的涡流和磁滞损耗,铁心有0.5mm厚的 硅钢片叠压而成。硅钢片绝缘层的作用?笼型转子结构简单、制造方便。对要求启动电流小、启动转矩大的电机,可以采用绕线式电机。 按电机功能来分,可分为: ①发电机——把机械能转换成电能; ②电动机——把电能转换成机械能; ③变压器、变频机、变流机、移相器——分别用于改变电压、频率、电流相位。 ④控制电机——作为控制系统中的元件。 又可按以下方法分类: 下面主要讲述高压中大型三相异步电机 S=ns-n/ns 2电机型号、结构及分类 2.1分类
a)按中心高分类 可分为微型电机、小型电机、中型电机、大型电机。一般来说,H80以下的称为 微型电机(也叫分马力电机,功率在1kW以下),H80?H315的称为小型电机,H355?H630的称为中型电机,H710?H1000的称为大型电机。 b)按防护等级分类 基本上可分为开启式、防护式和封闭式电机。开启式电机的常用结构是IP11,防护式电机的常用结构是和IP22、IP23,封闭式电机的常用结构是IP44和IP54。 IP是International Protection的意思,紧跟其后的第一个数字表示电机防护固体的能力(0-无防护;1-防护大于50mm的固体;2-防护大于12mm的固体;3-防护大于2.5mm 的固体;4-防护大于1mm的固体;5-防尘。),第二个数字表示电机防水的能力(0-无防护电机;1-防滴电机;2-15°防滴电机;3-防淋水电机;4-防溅水电机;5-防喷水电机;6-防海浪电机;7-防浸水电机;8-潜水电机)。 请参考标准GB4942.1-85《电机外壳防护分级》。 c)按安装方式分类 总体上可分为卧式电机和立式电机。 卧式电机的典型结构是IMB3,其余派生结构有IMB35、IMB5等。立式电机的典型结构是IMV1(把IMB5立起来装即可,轴伸朝下),其余派生结构有IMV15(把IMB35 立起来装即可,轴伸朝下)等。 IM 即International Mounting。 请参考标准GB997-2008《电机结构及安装型式代号》。(IEC60034-7:2001) 旋转电机的结构形式、安装形式及接线盒位置---IM代码。 结构形式:有关固定用构件、轴承装置和轴伸等电机部件的构成形式。 1根据负载类型选择不同的冷却方式
三相异步电动机的七种调速方法及特点
三相异步电动机分类特点以及调速方法 三相异步电动机分类: 1、从调速的本质来看,不同的调速方式无非是改变交流电动机的同步转速或不改变同步转两种。不改变同步转速的调速方法有1)绕线式电动机的转子串电阻调速、2)斩波调速、3)串级调速以及应用电磁转差离合器、4)液力偶合器、5)油膜离合器等调速。不改变同步转速的调速方法在生产机械中广泛使用。 2、改变同步转速的有改变定子极对数的多速电动机,改变定子电压、频率的变频调速有能无换向电动机调速等。 3、从调速时的能耗观点来看,有1)高效调速方法与2)低效调速方法两种:高效调速指时转差率不变,因此无转差损耗,如多速电动机、变频调速以及能将转差损耗回收的调速方法(如串级调速等)。有转差损耗的调速方法属低效调速,如转子串电阻调速方法,能量就损耗在转子回路中;电磁离合器的调速方法,能量损耗在离合器线圈中;液力偶合器调速,能量损耗在液力偶合器的油中。一般来说转差损耗随调速范围扩大而增加,如果调速范围不大,能量损耗是很小的。 我们清楚三相异步电动机转速公式为: n=60f/p(1-s) 从上式可见,改变供电频率f、电动机的极对数p及转差率s均可太到改变转速的目的,下面松文机电具体介绍其七种调速方法。 一、变极对数调速方法:这种调速方法是用改变定子绕组的接红方式来改变笼型电动机定子极对数达到调速目的。本方法适用于不需要无级调速的生产机械,如金属切削机床、升降机、起重设备、风机、水泵等。 特点如下:1、具有较硬的机械特性,稳定性良好; 2、无转差损耗,效率高;3、接线简单、控制方便、价格低;4、有级调速,级差较大,不能获得平滑调速;5、可以与调压调速、电磁转差离合器配合使用,获得较高效率的平滑调速特性。 二、变频调速方法:变频调速是改变电动机定子电源的频率,从而改变其同步转速的调速方法。变频调速系统主要设备是提供变频电源的变频器,变频器可分成交流-直流-交流变频器和交流-交流变频器两大类,目前国内大都使用交-直-交变频器。本方法适用于要求精度高、调速性能较好场合。其特点:1、效率高,调速过程中没有附加损耗;2、应用范围广,可用于笼型异步电动机;3、 调速范围大,特性硬,精度高;4、 技术复杂,造价高,维护检修困难。 三、串级调速方法 :串级调速是指绕线式电动机转子回路中串入可调节的附加电势来改变电动机的转差,达到调速的目的。大部分转差功率被串入的附加电势所吸收,再利用产生附加的装置,把吸收的转差功率返回电网或转换能量加以利用。根据转差功率吸收利用方式,串级调速可分为
三相异步电动机的使用、维护和检修教案
教案(首页) 授课班级机电高职1002 授课日期 课题序号 3.5 授课形式讲授授课时数 2 课题名称三相异步电动机的使用、维护和检修 教学目标1.了解三相异步电动机启动前的准备工作和启动时的注意事项。2.熟悉三相异步电动机运行中的监视项目。 3.熟悉三相异步电动机的定期检修内容。 4.了解三相异步电动机的常见故障以及处理方法。 教学重点1.了解三相异步电动机启动前的准备工作和启动时的注意事项。2.熟悉三相异步电动机运行中的监视项目。 教学难点1.了解三相异步电动机启动前的准备工作和启动时的注意事项。2.熟悉三相异步电动机运行中的监视项目。 教材内容更 新、补 充及删减 无 课外作业补充 教学后记无 送审记录 课堂时间安排和板书设计
复习5 导 入 5 新 授 60 练 习 15 小 结 5 一、电机选择原则 1、电源的原则 2、防护形式的选择 3、功率的选择 4、起动情况选择 5、转速的选择 二、电机的安装原则 三、电机的接地装置 四、电机的定期检查和保养 五、三相异步电机的常见故障及处理方法 课堂教学安排
课题序号课题名称第页共页教学过程主要教学内容及步骤 导入新授三相异步电动机在生产设备中长期不间断地工作,是目前工矿企业的主要动力装置,电动机的使用寿命是有限的,因为电动机轴承的逐渐磨损、绝缘材料的逐渐老化等等,这些现象是不可避免的。但一般来说,只要选用正确、安装良好、维修保养完善,电动机的使用寿命还是比较长的。在使用中如何尽量避免对电动机的损害,及时发现电动机运行中的故障隐患,对电动机的安全运行意义重大。因此,电动机在运行中的监视和维护,定期的检查维修,是消灭故障隐患,延长电动机使用寿命,减小不必要损失的重要手段。 一、电动机的选择原则 合理选择电动机是正确使用电动机的前提。电动机品种繁多,性能各异,选择时要全面考虑电源、负载、使用环境等诸多因素。对于与电动机使用相配套的控制电器和保护电器的选择也是同样重要的。 1.电源的选择 在三相异步电动机中,中小功率电动机大多采用三相380V电压,但也有使用三相22OV电压的。在电源频率方面,我国自行生产的电动机采用50Hz的频率,而世界上有些国家采用60Hz的交流电源。虽然频率不同不至于烧毁电动机,但其工作性能将大不一样。因此,在选择电动机时应根据电源的情况和电动机的铭牌正确选用。 2.防护型式的选择 由于工作环境不尽相同,有的生产场所温度较高、有的生产场所有大量的粉尘、有的场所空气中含有爆炸性气体或腐蚀性气体等等。这些环境都会使电动机的绝缘状况恶化,从而缩短电动机的使用寿命,甚至危及生命和财产的安全。因此,使用时有必要选择各种不同结构形式的电动机,以保证在各种不同的工作环境中能安全可靠地运行。电动机的外壳一般有如下型式: (1)开启型外壳有通风孔,借助和转轴连成一体的通风风扇使周围的空气与电动机内部的空气流通。此型电动机冷却效果好,适用于干燥无尘的场所。 (2)防护型机壳内部的转动部分及带电部分有必要的机械保护,以防止意外的接触。若电动机通风口用带网孔的遮盖物盖起来,叫网罩式;通风口可防止垂直下落的液体或固体直接进入电动机内部的叫防漏式;通风口可防止与垂直成100o范围内任何方向的液体或固体进入电动机内部的叫防溅式。(3)封闭式机壳严密密封,靠自身或外部风扇冷却,外壳带有散热片。适用于潮湿、多尘或含酸性气体的场合。 (4)防水式外壳结构能阻止一定压力的水进入电动机内部。 (5)水密式当电动机浸没在水中时,外壳结构能防止水进入电动机内部。 (6)潜水式电动机能长期在规定的水压下运行。 (7)防爆式电动机外壳能阻止电动机内部的气体爆炸传递到电动机外部,从而引起外部燃烧气体的爆炸。 3.功率的选择 课堂教学安排 课题序号课题名称第页共页
三相异步电动机的参数测定
实验报告
图2-1 三相异步电动机参数测定接线图 (2)利用调压电源改变供给异步电动机的电源,异步电动机连接成Y 形,即将U 、V 、W (A 、B 、C )各接A 、B 、C 三相宫电线,X 、Y 、Z 接在一起。 (3)当施加电压从零逐渐增加,达到某值时,电机开始启动,然后逐渐增加电压到额定电压。测量其空载转速,观察其方向,再降低电压,使电机停下来。 (4)将三相交流供电线任意两相交换,再逐渐增加电压,观察电动机的转向,理解电源相序变化对电机转向的影响。 2. 参数测定 测量定子绕组的冷态直流电组,用数字万用表测量三个定子绕组1r 值, 娶妻平均数,即得冷态电阻。至于异步电动机的参数12 12,,,,,m m x x x r r r '',可用空载和短路实验来测定。下面主要作这两个实验。 (1). 空载实验 a.按照图3-1接线。电机绕组为Y 接(U N =220V )。负载与电机脱开,即不加负载。 b.把交流调压器的电压调至最小位置,接通电源,逐渐升高电压,是电动机旋转,并注意电机的旋转方向。若电机的旋转方向不符合要求,则需改变任意两根输入线即可。 c.保持电机在额定电压下,空载运行数分钟,使电机的机械损耗达到稳
1 x由下列短路实验求得。励磁电阻: 2 3 Fe m P r I =,式中 Fe P为额定电压下的铁损耗,由图3-2确定。 图2-2 电机的铁损与机械损耗 即作出2 () P f U =曲线,在2H U时对应的,Fe mec mec P P P 。可取2 () P f U =的延长线与 纵轴的交点,线段OK的长度表示机械损耗 mec P。 由短路实验计算出短路参数: 短路阻抗K k k U Z I =;短路电阻: 2 3 k k k P R I =;短路电抗:22 k k k X Z R =-,式中 ,, k k k U I P分别是短路相电压、短路相电流、三相短路功率之和。 转子绕组的折合值为 21 k r R R '=-,定、转子漏电抗为 12 1 2k x x X ' =≈最后画出完整的三相异步电动机等效电路图,并填入相关参数。
三相异步电动机的设计说明书
三相异步电动机的设 计说明书 一.三相异步电动机的基本结构 三相异步电动机由两个基本部分构成:固定部分—定子和转子,转子 按其结构可分为鼠笼型和绕线型两种。 1-1.定子的结构组成 定子由定子铁心、机座、定子绕组等部分组成,定子铁心是异步电动机磁路的一部分,一般由0.5毫米厚的硅钢片叠压而成,用压圈及扣片固紧,各片之间相互绝缘,以减少涡流损耗。 定子绕组是由带有绝缘的铝导线或铜导线绕制而成的,小型电机采用散下线圈或称软绕组,大中型电机采用成型线圈,又称为硬绕组。 1-2.转子的结构组成 转子由转子铁心、转子绕组、转子支架、转轴和风扇等部分组成,转子铁心和定子铁心一样,也是由0.5毫米硅钢片叠压而成。鼠笼型转子的绕组是由安放在转子铁心槽的裸导条和两端的环形端环连接而成,如果去掉转子铁心,绕组的形状象一个笼子;绕线型转子的绕组与定子绕组相似,做成三相绕组,在部星型或三角型。 1-3.工作原理 当定子绕组接至三相对称电源时,流入定子绕组的三相对称电流,在气隙产生一个以同步转速n 1 旋转的定子旋转磁场,设旋转磁场的转向为逆 时针,当旋转磁场的磁力线切割转子导体时,将在导体产生感应电动势e 2 ,电动势的方向根据右手定则确定。N极下的电动势方向用?表示,S极下的 电动势用Θ表示,转子电流的有功分量i 2a 与e 2 同相位,所以Θ ?和既表示 电动势的方向,又表示电流有功分量的方向。转子电流有功分量与气隙旋转磁场相互作用产生电磁力f em ,根据左手定则,在N极下的所有电流方向为
?的导体和在S极下所有电流流向为Θ的导体均产生沿着逆时针方向的切 向电磁力f em ,在该电磁力作用下,使转子受到了逆时针方向的电磁转矩M em 的驱动作用,转子将沿着旋转磁场相同的方向转动。驱动转子的电磁转矩与转子轴端拖动的生产机械的制动转矩相平衡,转子将以恒速n拖动生产机械稳定运行,从而实现了电能与机械能之间的能量转换,这就是异步电动机的基本工作原理。 二.异步电动机存在的缺点 2-1.笼型感应电动机存在下列三个主要缺点。 (1)起动转矩不大,难以满足带负载起动的需要。当前社会上解决该问题的多数办法是提高电动机的功率容量(即增容)来提高其起动转矩,这就造成严重的“大马拉小车”,既增加购买设备的投资,又在长期的应用中因处于低负荷运行而浪费大量电量,很不经济。第二种办法是增购液力偶合器,先让电动机空载起动,在由液力偶合器驱动负载。这种办法同样要增加添购设备的投资,并因液力偶合器的效率低于97%,因此至少浪费3%的电能,因而整个驱动装置的效率很低,同样浪费电量,更何况添加液力偶合器之后,机组的运行可靠性大大下降,显著增加维护困难,因此不是一个好办法。 (2)大转矩不大,用于驱动经常出现短时过负荷的负载,如矿山所用破碎机等时,往往停转而烧坏电动机。以致只能在轻载状况下运行,既降低了产量又浪费电能。 (3)起动电流很大,增加了所需供电变压器的容量,从而增加大量投资。另一办法是采用降压起动来降低起动电流,同样要增加添购降压装置的投资,并且使本来就不好的起动特性进一步恶化。 2-2.绕线型感应电动机 绕线性感应电动机正常运行时,三相绕组通过集电环短路。起动时,为减小起动电流,转子中可以串入起动电阻,转子串入适当的电阻,不仅可以减小起动电流,而且由于转子功率因数和转子电流有功分量增大,起动转矩也可增大。这种电动机还可通过改变外串电阻调速。绕线型电动机
三相异步电动机型号说明
三相异步电动机型号字母表示的含义 J——异步电动机; O——封闭; L——铝线缠组; W——户外; Z——冶金起重; Q——高起动转轮; D——多速; B——防爆; R一绕线式; S——双鼠笼; K一—高速; H——高转差率。 电磁滑差调速电机型号字母表示的含义 YCT系列电磁调调速三相异步电动机是一种交流恒转矩无级调速电动机。其调速特点是调速范围大、无失控区、起动力矩大、可以强励起动,频繁起动时,对电网无冲击。适用于纺织、化工、治金、建材、食品、矿山等部门,如,可用于油漆流水线、装配流水线的的传输带、注塑料机、印刷机、印染机、空调设备、输送设备等。 型号含意 YD系列变极多速三相异步电动机是一般用途的全封闭自扇冷式鼠笼型节能电动机,是Y系列(IP44)三相异步电动机的主要派生系列之一 型号说明
产品型号由产品代号、规格代号、特殊环境代号和补充代号等四个部分组成。它们 的排列顺序为:产品代号—规格代号—特殊环境代号—补充代号。 一、产品代号:由电机类型代号、电机特点代号、设计序号和励磁方式代号等四个 小节顺序组成。 1,类型代号是表征电机的各种类型而采用的汉语拼音字母。 比如:异步电动机Y 同步电动机T 同步发电机TF 直流电动机Z 直流发电机ZF 2,特点代号是表征电机的性能、结构或用途,也采用汉语拼音字母表示 比如:隔爆型用B表示YB轴流通风机上用YT 电磁制动式YEJ变频调速式YVP 变极多速式YD 起重机用YZD等 3.设计序号是指电机产品设计的顺序,用阿拉伯数字表示。对于第一次设计的产品不标注设计序号, 对系列产品所派生的产品按设计的顺序标注。比如:Y2 YB2 4励磁方式代号分别用字母表示,S表示三次谐波,J表示晶闸管,X表示相复励磁 二.规格代号主要用中心高、机座长度、铁心长度、极数来表示。 1,中心高指由电机轴心到机座底角面的高度;根据中心高的不同可以将电机分为大型、中型、小型和微型四种,其中中心高 H在45mm~71mm的属于微型电动机; H在80mm~315mm的属于小型电动机; H在355mm~630mm的属于中型电动机; H在630mm以上属于大型电动机。 2. 机座长度用国际通用字母表示:S——短机座 M——中机座 L——长机座 3,铁心长度用阿拉伯数字1、2、3、4、、、由长至短分别表示 4,极数分2极、4极、6极、8极等。 三,特殊环境代号有如下规定: 特殊环境 代号 “高”原用 G 船(“海”)用 H
低压电器的分类及三相异步电动机的控制电路
低压电器 第一节低压电器的分类 第二节低压配电电器 一、熔断器(FU) 1)型号及含义 2)熔断器的选用 二、刀开关与转换开关 1、刀开关 1)开启式负荷开关(磁底胶盖闸刀开关) 开启式负荷开关安装时注意: ①、手柄要朝上,不能倒装或平装,防止震动而造成下落现象; ②、接线时,电源接上端,负载解下端; ③、拉闸时操作要迅速,一次到位,保证与电源的良好接触; ④、带负载运行时不能进行合分闸。
2)自动空气断路器(自动开关) 可实现电路的短路、过载或失电压与欠电压保护,能自动分段故障电路。 3)封闭式负荷开关(铁壳开关) 优势:①采用储能机构进行合分闸操作,当扳动操作手柄时,通过弹簧储蓄能量,扳到一定位时,弹簧储存能量瞬时爆发出来,推动触点合分闸。 ②具有连锁机构,当铁盖打开时,不能进行合分闸,对于操作者而言,避免了人身安全。 使用铁壳开关应注意外壳要可靠接地,以防止意外漏电造成触电事故。 2)转换开关(组合开关) 转换开关用于照明电路中,额定电流应大于被控制电路中各负载电流的总和;用于设备电源引入开关时也应大于负载电流的总和;用于电动机中,额定电流是电动机额定电流的2~3倍;也可用于5KW以下小容量电动机的启停和正反转控制,以及机床照明电路中的开关控制。 三、按钮 安装:①按钮安装在面板上时,应布置整齐,排列合理, 如根据电动机启动的先后顺序,从上到下或从左到 右排列; ②同一机床运动部位有几种不同的工作状态时(如 上、下、前、后、松、紧等),应使每一对相反状态的按钮安装在
一起; ③按钮的安装应牢固,安装按钮的金属板或金属按钮盒必须可靠接地。 按钮常见故障及处理方法故障现象故障原因处理方法 触点接触不良触点烧损 触点表面有尘垢 触点弹簧失效 修理触点或更换产品 清理触点表面 重绕弹簧或更换产品 触点间短路塑料受热变形,导致接线螺钉相碰 短路 杂物或油污在触点间形成通路 更换产品,并查明发热原因,如白炽灯发热所 致,可降低电压 清洁按钮内部 低压控制电器 四、接触器 交流接触器直流接触器作用通断交流电路通断直流电路 结构铁芯用硅钢片叠加而成,减少涡流和磁滞损 耗, 铁芯用整块钢板制造 端面装有短路环不装短路环 线路短而粗,呈圆筒状,铁心发热为主线圈薄而长,呈圆筒状,以线圈发热为主 灭弧栅片灭弧磁吹式灭弧 操作频率启动电流大,操作频率不能太高,600次/ 小时 无启动电流,操作频率较高,1200次/小时 Ⅰ、当交流接触器的额定值与直流接触器相同时,能否互换使用? 答:不能,交流接触器线圈匝数少,直流接触器线圈匝数多,直流电阻较大,若将交流接触器用于直流,其线圈电流将大大超过正常值,导致线圈过热损坏,若将直流接触器用于交流,因电阻过大,线圈电流远小于额定值,衔铁难于吸合,无法正常工作。 Ⅱ、如果交流接触器在工作时噪声过大的原因有哪些? 答:①电源电压过低;②触头弹簧压力过大;③铁芯或衔铁歪斜,造成机械卡住;④铁芯或衔铁端面有油污、灰尘或其他异物;⑤短路环断裂。 Ⅲ、接触器在运行过程中不能切断短路电流,所以必须与熔断器配合使用。 Ⅳ、交流接触器通电后,若衔铁因故卡住,不能吸合,
(完整版)三相异步电动机的型号及选用
三相异步电动机的型号及选用 三相异步电动机的分类 三相异步电动一般为系列产品,其系列、品种、规格繁多,因而分类也较繁多。 1、按电动机尺寸大小分类 大型电动机:定子铁心外径D>1000mm或机座中心高H>630mm。 中型电动机:D=500~1000mm或H=355~630mm。 大型电动机:D=120~500mm或H=80~315mm。 2、按电动机外壳防护结构分类 3、按电动机冷方式分类 电动机按冷却方式可分为自冷式、自扇冷式、他扇冷式等。可参见国家标准GB/T1993-93《旋转电机冷却方式》。 4、按电动机的安装形式分类 IMB3:卧式,机座带底脚,端盖上无凸缘。 IMB5:卧式,机座不带底脚,端盖上有凸缘。 IMB35:卧式,机座带底脚,端盖上有凸缘。 5、按电动机运行工作制分类 S1;连续工作制 S2:短时工作制 S3~S8:周期性工作制 6、按转子结构形式分类 三相笼型异步电动机 三相绕线型异步电动机 三相异步电动机的型号及选用
我国电机产品型号的编制方法是按国家标准GB4831-84《电机产品型号编制方法》实施的,即有汉语拼音字母及国际通用符号和阿拉伯数字组成,按下列顺序排列。 1 产品(类型)代号 CHANPINGUI 异步电动机同步电动机同步发电机直流电动机直流发电机汽轮发电机水轮发电机测功机潜水电泵纺织用电机交流换向器电动机 产品代号 Y T TF Z ZF QF SF C Q F H 2 特殊环境代号 使用场合热带用湿热带用干燥带用高原用船用户外用化工防腐用 汉语拼音字母 T TH TA G H W F 产品规格代号:L-----长机座;M-----中机座;S-----短机座。 下面为两个产品举例: (1)三相异步电动机 Y2---132M---4 规格代号,中心高132mm,M中机座,4极 产品代号,异步电动机,第二次改型设计 (2)户外防腐型三相异步电动机 Y---100L2---4---WF1 特殊环境代号,W户外用,F化工防腐用,1中等防腐 规格代号,中心高100,长机座第二铁心长度,4极 产品代号,异步电动机 3 常用三相异步电动机产品型号、结构特点及应用场合 序号名称型号机座号与功率范围结构特点应用场合 新老 1 小型三相异步电动机(封闭式) Y2 (IP55) Y(IP44) JO2 JO H80~355
Y系列三相异步电动机的技术参数54876
Y系列三相异步电动机的技术参数 1、Y系列(IP44)三相异步电动机: Y系列三相异步电动机是全国统一设计的新系列产品,将取代JO系列电动机,Y系列三相异步电动机具有高效、节能、噪音低、震动小等特点。 2、Y系列(IP23)三相异步电动机: Y系列(IP23)三相异步电动机,机座号为160 - 315,其防护结构形式不同于IP44的封闭式,但比防滴式优越,其体积比Y系列(IP44)分别减少20%和15%。 Y系列(IP44)的技术参数见下表: 型号功率 ( KW) 电流 (A) 转速 r/min 铁芯 长度 定子 外径 定子 内径 输出 轴径 Y801 - 2 0.75 1.8 2830 65 120 67 Y8012- 2 1.1 2.5 2830 80 120 67 Y801- 4 0.55 1.5 1390 65 120 75 Y802- 4 0.75 2.0 1390 80 125 75 Y90S- 2 1.5 3.4 2840 80 130 72 Ф24 Y90S- 4 1.1 2.8 1400 90 130 80 Y90L- 4 1.5 3.7 1400 120 130 80 Y90S- 6 0.75 2.3 910 100 130 86 Y90L-6 1.1 3.2 910 125 130 86 Y100L-2 3.0 6.4 2870 100 155 94 Y100L1-4 2.2 5.0 1430 105 155 98
Y100L2-4 3.0 6.8 1430 135 155 98 Ф28 型号功率 ( KW) 电流 (A) 转速 r/min 铁芯 长度 定子 外径 定子 内径 输出 轴径 Y100L-6 1.5 4.0 940 100 155 160 Y112M-2 4.0 8.2 2890 105 175 98 Y112M-4 4.0 8.8 1440 135 175 110 Y112M-6 2.2 5.6 940 110 175 120 Y132S1-2 5.5 11 2900 105 210 116 Y132S2-2 7.5 15 2900 125 210 116 Y132S-4 5.5 12 1440 115 210 136 Ф38 Y132M-4 7.5 15 1440 160 210 136 Ф38 Y132S-6 3.0 7.2 960 110 210 148 Y132M1-6 4.0 9.4 960 140 210 148 Y132M2-6 5.5 13 960 180 210 148 Y132S-8 2.2 5.8 710 110 210 148 Y132M-8 3.0 7.7 710 180 210 148 Y160M1-2 11 22 710 125 260 150 Ф42 Y160M2-2 15 29 2930 155 260 150 Ф42 Y160L-2 18.5 36 2930 155 260 150 Ф42 Y160M-4 11 23 1460 195 260 170 Ф42 Y160L-4 15 30 1460 195 260 170 Ф42 Y160M-6 7.5 17 970 145 260 180 Ф42
三相异步电动机的工作特性和参数测定
第8章三相异步电动机的工作特性和参数测定 原理简述 一、基本方程式和等效电路 异步电机定子绕组所产生的旋转磁场,以转差速度切割转子导体,在转子导体中感应电势,产生电流,转子导体中的电流与定子旋转磁场相互作用而产生电磁转矩,使转子旋转。当转子的 转速与定子旋转磁场的转速相等时,定、转子之间没有相对切割,转子中就没有电流,也就不能产生转矩。因此转子的转速一定要异于磁场的转速,故称异步电机。由于异步而产生的转 矩称为异步转矩。当时,为电动机运行;时为发电机运行;当即转子逆着磁场方向旋转时,它是制动运行。异步电机绝大多数都是作为电动机运行。其转矩和转速(转差率)曲线,如图8-1所示。 由《电机学》中可知,将转子边的量经过频率折算和绕组折算,可得到异步电机的基本方程式为: 式中转差率是异步电机的重要运行参数,为折算到定子一边的转子参数,也就是从定子上测得转子方面的数值。
由方程式可以画出相应的等效电路,如图8-2所示。 当异步电动机空载时,,。附加电阻。图8-2中转子回路相当 开路;当异步电动机堵转时,,,附加电阻,图8-2转子回路相当短路,这就和变压器完全相同。因此异步电机也可以通过空载实验和堵转(短路)实验来求出异步电机的等效电路中的各参数。 二、空载实验 由空载实验可以求得励磁参数,以及铁耗和机械损耗。实验是在转子轴上 不带任何机械负载,转速,电源频率的情况下进行的。用调压器改变试验电压 大小,使定子端电压从逐步下降到左右,每次记录电动机的端电压、 空载电流和空载功率,即可得到异步电动机的空载特性,如图8-3所示。 图 8-3 空载特性图 8-4 铁耗和机械耗分离 空载时,电动机的输入功率全部消耗在定子铜耗、铁耗和转子的机械损耗上。所以从空载功 率中减去定子铜耗,即得铁耗和机械耗之和,即 式中为定子绕组每相电阻值,可直接用双臂电桥测得。 机械损耗仅与转速有关而与端电压无关,因此在转速变化不大时,可以认为是常数。