电动汽车用电机控制器过电流保护方法
2011年第8期
D
驱动控制rive and co n trol
电动汽车用电机控制器过电流保护方法
61
收稿日期:2011-02-15
电动汽车用电机控制器过电流保护方法
王淑旺,郗世洪,孙纯哲,周 政,桂星星
(合肥工业大学,安徽合肥230009)
摘 要:系统地分析了电机控制器过电流故障产生的原因,建立了基于TM S320LF2407A 的电控平台,搭建了电流的检测、采样、硬件过流保护电路和软件过流保护策略,从而有效地解决了电机控制器过电流故障的保护问题,并且提出了减少过流故障的几点建议。
关键词:电动汽车;电机控制器;过电流保护
中图分类号:T M 33 文献标识码:A 文章编号:1004-7018(2011)08-0061-03
Over-Current Prot ecti o n M et hods of E lectric V ehicle M ot or Controller WANG Shu -w ang,X I Shi -hong,SU N Chun -zhe ,Z HOU Zheng,GUI X ing -xing
(H efeiUn iversity of Techno logy ,H e fei 230009,China)
Abstract :Th is paper syste m aticall y analyzed the causes o f over-curren t i n m oto r contro ller ,bu ilt the platfo r m o f the electronic contro l based on TM S320LF2407A D SP ,and establis hed the current detection ,samp li ng ,ov er-cu rrent ha rd w are protection circu it and ov er-current so ft w are protec ti on strategy .W ith these ,the system effecti ve l y so lves the prob l e m of over -current i n m otor controll e r ,and proposes som e suggesti ons on how to reduce t he over-current f ault of mo tor contro ller .
K ey word s :electr i c vehic l e ;m oto r contro ller ;over-curren t protec tion
0引 言
随着能源危机的日益加剧和环境压力的增加,
电动汽车代替传统的燃油汽车已经成为一个必然的趋势
[1]
。电驱动系统是电动汽车的心脏,是提高电
动汽车的驱动性能、行驶里程及可靠性的根本保证[2]
,电机控制器是电驱动系统的关键部件,在复
杂极限路况下使电机控制器内部的电流、电压值可能达到所设定的值,内部的元器件承受能力有限,尤其是对功率模块的损害巨大,需要对其采取相应的措施。其中过电流故障是电动车电机控制器的常见故障,主要是突变性和峰值性的电流值,该故障的保护在电机控制器中极其重要。
目前电机控制器过电流保护一般可通过延长加速时间和减速时间,减少负载突变,加强绝缘水平,外加能耗制动元件、E MC 滤波器
[3]
。下面从电机控
制器产生过电流的原因、电流值的信号检测、采样、硬件保护电路和软件保护策略角度对该电机控制器进行过电流分析和保护。
1电机控制器过电流故障产生原因
过电流故障是电动车电机控制器的常见故障,主要是突变性和峰值性的电流值,一般表现为:
(1)电动汽车电机控制器输出端三相线出现短
路,导致过电流;
(2)电动车出现冲击负载或者电动车爬坡出现驱动电机堵转时,导致驱动电机的两相长时间接通,相线电感饱和,导致过电流;
(3)电动车急加速(急刹车)时,车子本身负载惯性较大,升速(降速)时间设定太短,电机控制器的工作频率上升太快,同步电机的转速迅速上升(下降),同步电机原来处于转子产生的磁场与定子产生的旋转磁场同步,当出现急加速(急刹车)时,电机的转子转速因惯性较大,转子速度仍处于高速旋转,转子产生的磁场与定子的旋转磁场出现转差过大,导致绕组切割磁感线太快,产生过大的感应电动势,导致产生过电流;
(4)电机控制器电源侧缺相、输出侧断线、电动机内部故障引起过电流故障;
(5)驱动电机受电磁干扰的影响,漏电流变大,产生轴电流、轴电压,引起电机控制器过电流;
(6)电机控制器的控制电路遭到电磁干扰,导致控制信号错误,速度反馈信号丢失或非正常时,也会引起过电流;
(7)电机控制器的容量选择与负载特性不匹配,引起电机控制器功能和工作异常,造成过电流;(8)电机控制器参数设定不正确和硬件电路出问题,也导致过电流;
(9)短时间内I G B T 电流值变化过大也会导致
过电流;如瞬时断电,电流产生尖峰,导致I GBT 过
D
驱动控制rive and co n trol
2011年第8期
电动汽车用电机
控制器过电流保护方法
62
电流;电机控制器复位后再起动造成过电流。
电机控制器过电流主要是加减速时间太短、负载发生突变、电压过低或过高、断相、短路、漏电流、
电磁干扰及电机控制器内部元件故障等引起[3]
。
2电机控制器的保护方法
电动汽车电机控制器过电流故障是常见故障,故障的保护显得非常重要,对车用电机控制器的过电流保护主要从硬件处理和软件处理进行。硬件处理主要包括对传感器的选择,如:灵敏度和精确度;对DSP 处理器能力的选择;电流信号的检测和处理,主要是包括滤波、判断和保护。软件处理主要是基于得到过流信号后通过程序的比较分析进行的保护。下面从多个角度分别介绍过流保护的措施。
2.1硬件检测及保护
硬件电路的保护实现反应速度较快,在电流信号的检测、采集和电机控制器功率模块保护几个环节中起到很重要的作用。
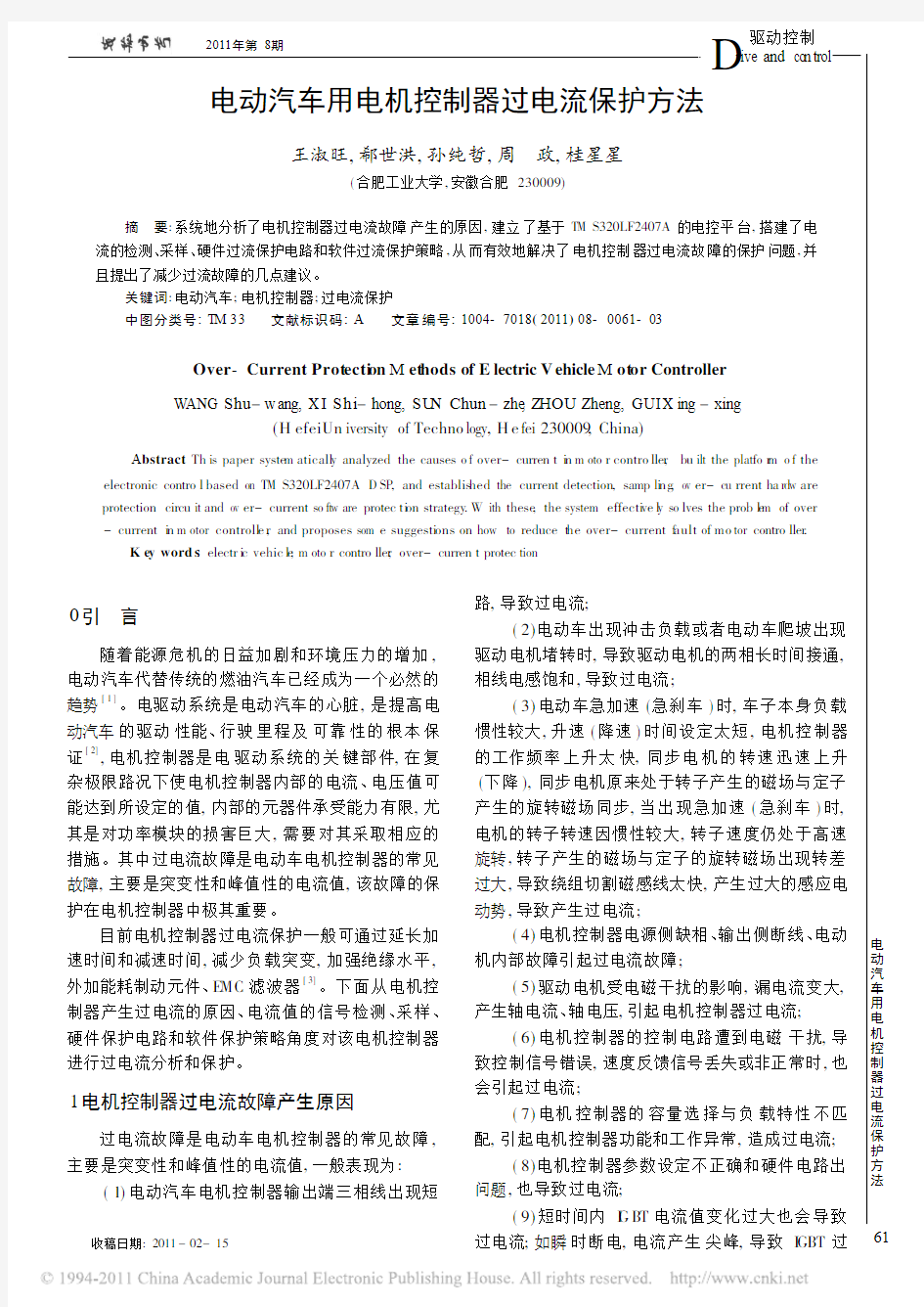
电机控制器的电流检测通过电流传感器检测母图1 电机控制器主电路
线电流和相线电流。电机控制器主电路如图1所示。图中显示为检测的线电流I D C 、相线电流I A _re 和I C _re 。
如图2所示,以A 相线检测为例,通过电流传感器检测到的电压信号通过RC 滤波电路和电压跟随电路,得到电流比较信号I A _comp ,I A _co m p 一路信号经过差分电路得到DSP 芯片可接受的0~3 3V 的信号I A
_DSP ,I A _D SP 通过A /D 转换后得到实际的电流值,通过软件程序进行判断是否过流。另一路I A _co m p 信号通过与基准电路的比较,进行判断是否过流
,若过流,得到过流信号I over ,然后I over 信号进入过流锁存
电路,出现故障后就进行停机保护,防止故障信号复位导致在有故障的条件下运行车辆;PDPI N TA 为功率驱动保护中断输入引脚,在确定出现故障后,该中断有效,将P WM 输出引脚(EVA )置为高阻态,通过DSP 关断六路驱动信号;同时确定出现故障后直接把驱动信号的与门电路进行置低电平,通过硬件电
图2 过电流硬件处理
路直接关断驱动信号,确保车辆的安全。
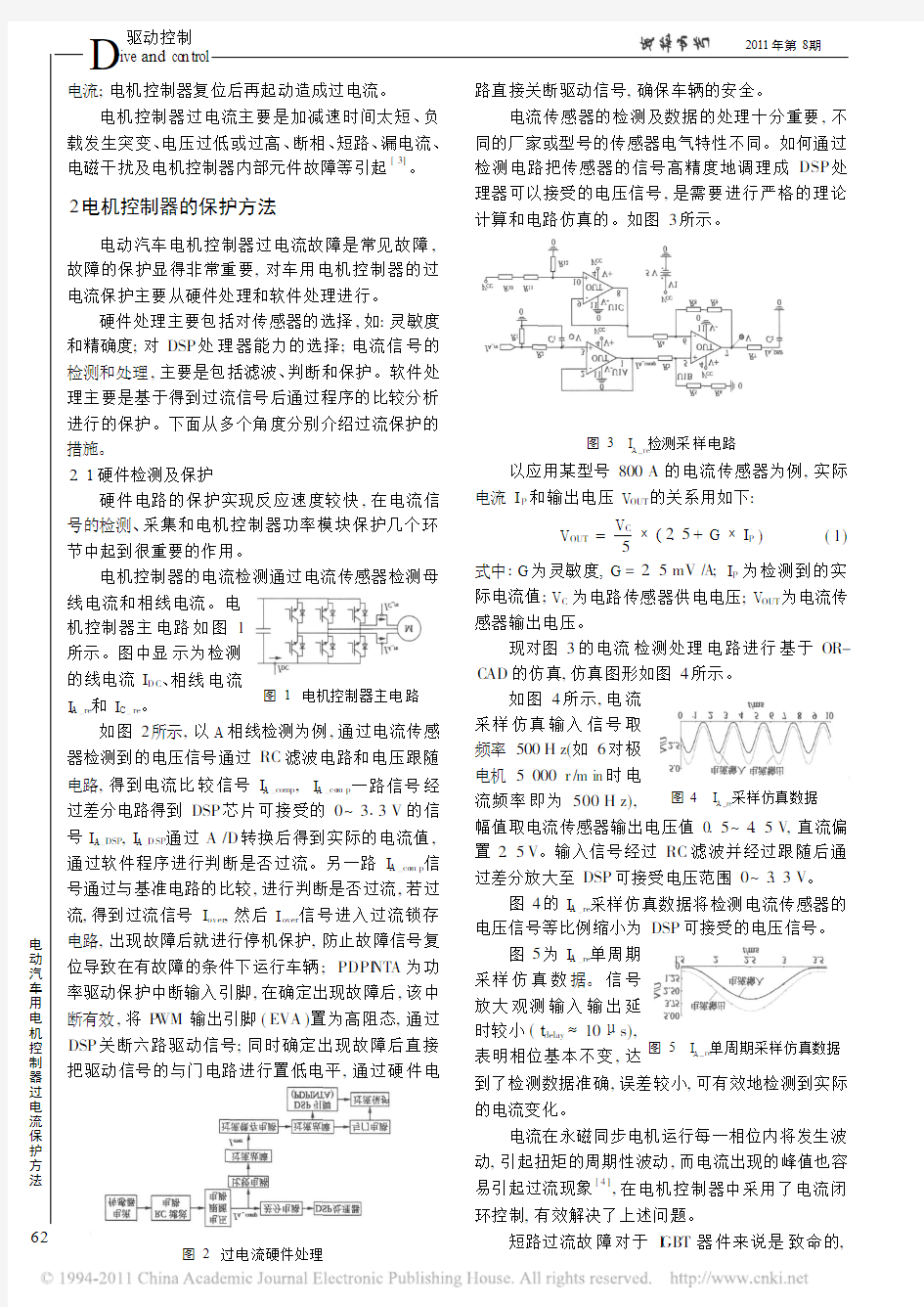
电流传感器的检测及数据的处理十分重要,不同的厂家或型号的传感器电气特性不同。如何通过检测电路把传感器的信号高精度地调理成DSP 处理器可以接受的电压信号,是需要进行严格的理论计算和电路仿真的。如图3所示。
图3 I A _re 检测采样电路
以应用某型号800A
的电流传感器为例,实际电流I P 和输出电压V OUT 的关系用如下:
V OUT =
V C
5
(2.5+G I P )(1)式中:G 为灵敏度,G =2.5mV /A;I P 为检测到的实
际电流值;V C 为电路传感器供电电压;V OUT 为电流传感器输出电压。
现对图3的电流检测处理电路进行基于OR-C AD 的仿真,仿真图形如图4所示。
图4 I A
_re 采样仿真数据
如图4所示,电流采样仿真输入信号取频率500H z(如6对极电机5000r /m in 时电流频率即为500H z),
幅值取电流传感器输出电压值0.5~4.5V,直流偏置2.5V 。输入信号经过RC 滤波并经过跟随后通过差分放大至DSP 可接受电压范围0~3.3V 。图4的I A _re 采样仿真数据将检测电流传感器的电压信号等比例缩小为DSP 可接受的电压信号。
图5 I A _re 单周期采样仿真数据
图5为I A _re 单周期采样仿真数据。信号放大观测输入输出延时较小(t delay 10 s),表明相位基本不变,达到了检测数据准确,误差较小,可有效地检测到实际
的电流变化。
电流在永磁同步电机运行每一相位内将发生波动,引起扭矩的周期性波动,而电流出现的峰值也容易引起过流现象
[4]
,在电机控制器中采用了电流闭
环控制,有效解决了上述问题。
短路过流故障对于I G BT 器件来说是致命的,
2011年第8期
D
驱动控制rive and co n trol
电动汽车用电机控制器过电流保护方法
63
短路发生时强大的电流流过I GBT ,若不及时采取保护,将会直接导致器件损毁。1ED020I12-FA 驱动芯片采用了特有的无芯变压器隔离技术,能够驱动耐压600V /1200V 的I G B T 或I GBT 模块,该驱动器提供了过流保护功能,通过检测V ce 电压来实现I G BT 短路保护。
1ED020I 12-F A 的短路保护包括两部分:一部分是对I GBT 集电极端进行退饱和检测以判断是否有短路过流故障;另一部分是在关断I G B T 过程中对栅极进行短路箝位。短路过流故障识别,主要是通过检测I G B T 集电极端的饱和电压来实现的。I G -BT 正常工作时,集电极饱和压降很低;但当短路过流故障产生时,U ce 会明显增至高于正常导通时的饱和压降水平,一般为7V 以上,产生退饱和现象。检测电路如图6所示,电路中,芯片DESAT 引脚与C B lank 、R DESAT 和DDESAT 构成了退饱和检测电路,DESAT 引脚端电压变化可用下式表示:
U DESAT =250 R D ES AT +U DDES AT +U ce
(
2)
图6 1ED 020I12-FA 驱动保护电路
在退饱和检测时,当U DES AT 高于门限值9V 时,即表明I G B T 出现了短路或者过流,此时芯片输出
故障信号,同时OUT 输出低电平来及时关闭I G BT,同时在延时2 s 后上传故障信号。因为I GBT 导通时V ce 电压下降有一定的延迟,通常退饱和检测要设定一定的保护盲区,以防止退饱和误判断[5]
。
2.2软件策略及保护
软件上实现了对数据的处理和分析,对各工况下的故障信号做出相应的处理。故障安全保护在电机控制器中采用分等级处理,对不同的故障信号采用不同级别的措施,这样更有效地保护电机控制器。
在电机控制器保护后,需要确保车辆的安全,当关断器件后需要产生一个毫秒级的关断时间,使I G BT 在电流下降到安全水平后再次开通,在保护器件的同时,也不影响电动汽车退出过流状态后的正常行驶。
如图3所示,该电路经过滤波、跟随和差分得到I A _D SP ,该信号采集后通过模数转换输入到DSP 中,经过平滑处理,转换为实际值后进行判断故障,图7为软件保护流程。
下面对几种过电流在软件进行保护处理:
(1)电机控制器工作中因过载出现过电流故障,
根据驱动电机和负载能力的大小确定电流限制
图7 软件保护流程
I li m ,当电流值超过了I li m 值时就采用降低电机控制器工作频率f X 的方法处理(降功率处理),当电流值小于I li m 的值时再恢复到额定值。图8为降功率
保护策略[6]
。电动车出现堵转时,也会出
现过电流,此时可通过该方法进行处理。
(2)对电动车急加速或急刹车的条件下,可采用延长急加速和急减速的时间来降低电流值。当超过所设置的过电流值I li m 时就保持电机控制器工作频率f X 不变,等到电流值小于I li m 时,再增加电机控制器的工作频率f X ,保证电机控制器的安全。图9为延长时间保护策略
[6]
。
图8 降功率保护策略图9 延长时间保护策略
3结 语
通过对电动车用电机控制器的过电流保护分析,可见电机控制器的过电流出现的原因很多,必须从数据的检测、采集和数据处理,再到硬件电路和软件控制策略等方面分别进行保护,才能达到预期的目的。
电动汽车用电机控制器的过电流保护非常重要,故障保护从电机控制器的设计之初到最终的产品,整个设计、研发、采购、加工、调试都需要注意,系统地考虑故障问题。参考文献
[1] 陈清泉,孙逢春,祝嘉光.现代电动汽车技术[M ].北京:北京
理工大学出版社,2002.
[2] 陈清泉.环境保护和电动车的开发[J ]江苏机械制造与自动
化,2000(1):3-7.
[3] 李锐.变频器过流原因分析[M ].印刷杂志出版社,2006.[4] Bolton H R.Investi gati on i nto a class of bru s h less DC m otor w it h
quasis quare volt age and cu rrent [J ].I EE PROC,P t 2B ,1986,133(2):103-111.
[5] 施贤能,吴庚泽,朱元.1ED020I12-FA 在驱动中大功率I GBT
中的应用[J].企业技术开发(学术版),2010,29(5):4-6.[6] 张燕宾.SP WM 变频调速应用技术[M ].北京:机械工业出版
社,2001.
作者简介:王淑旺(1978-),男,博士,副教授,硕士生导师,研究方向为电动汽车电驱动系统和汽车自动化装备。
MOSFET在电动车无刷电机控制器中的应用
MOSFET在电动车无刷控制器中的应用 蔡林高级应用工程师 苏州硅能半导体科技股份有限公司 摘要:本文介绍了电动自行车无刷控制器的热设计、短路保护时间确定及驱动电路的优化。 第一节:电动自行车无刷电机控制器的热设计 z概述 由于功率MOSFET具有驱动电流小、开关速度快等优点,已经被广泛地应用在电动车的控制器里。但是如果设计和使用不当,会经常损坏MOSFET。一旦损坏,MOSFET的漏源极短路,晶圆将被严重烧毁。通常MOSFET损坏模式包括:过流、过压、雪崩击穿、超出安全工作区等。这些原因导致的损坏最终都是因为晶圆温度过高而损坏,所以在设计控制器时,热设计是非常重要的。MOSFET的结点温度必须经过计算,确保在使用过程中MOSFET结点温度不会超过其最大允许值。 z无刷电机控制器简介 由于无刷电机具有高扭矩、长寿命、低噪声等优点,已在各领域中得到了广泛应用,其工作原理也已被大家广为熟知。国内电动车电机控制器通常工作方式为三相六步,工作及原理图如图1所示,其中Q1, Q2为A相上管及下管;Q3, Q4为B相上管及下管;Q5, Q6为C相上管及下管。MOSFET全部使用SSF7509。 MOSFET工作在两两导通方式,导通顺序为Q1Q4→Q1Q6→Q3Q6→Q3Q2→Q5Q2→Q5Q4→Q1Q4,控制器的输出通过调整上桥PWM脉宽实现,PWM频率一般设置为15KHz。
当电机及控制器工作在某一相时(假设B相上管Q3和C相下管Q6),在每一个PWM周期内,有两种工作状态: 状态1: Q3和Q6导通, 电流I1经Q3、电机线圈L、Q6、电流检测电阻Rs流入地。 状态2: Q3关断, Q6导通, 电流I2流经电机线圈L、Q6、Q4,此状态称为续流状态。在状态2中,如果Q4导通,则称控制器为同步整流方式。如果Q4关断,I2靠Q4体二极管流通,则称为非同步整流工作方式。 流经电机线圈L的电流I1和I2之和称为控制器的相电流,流经电流检测电阻Rs的平均电流I1称为控制器的线电流,所以控制器的相电流要比控制器的线电流要大。
电动车无刷马达控制器硬件电路详解
电动车无刷马达控制器硬件电路详解 电动车无刷电机是目前最普及的电动车用动力源,无刷电机以其相对有刷电机长寿,免维护的特点得到广泛应用,然而由于其使用直流电而无换向用的电刷,其换向控制相对有刷电机要复杂许多,同时由于电动车负载极不稳定,又使用电池作电源,因此控制器自身的保护及对电机,电源的保护均对控制器提出更多要求。 自电动车用无刷电动机问世以来,其控制器发展分两个阶段:第一阶段为使用专用无刷电动机控制芯片为主组成的纯硬件电路控制器,这种电路较为简单,其中控制芯片的代表是摩托罗拉的MC33035,这个不是这里的主题,所以也不作深入介绍。第二阶段是以MCU为主的控制芯片。这是这篇文章介绍的重点,在MCR版本的设计中,揉和了模拟、数字、大功率MOSFET 驱动等等许多重要应用,结合MCU智能化控制,是一个非常有启迪性的设计。 今以应用最广泛的以PIC16F72为智能控制中心,350W的整机电路为例,整机电路如图1: 整机电路看起来很复杂,我们将其简化成框图再看看:
图2:电路框图 电路大体上可以分成五部分: 一、电源稳压,供应部分; 二、信号输入与预处理部分; 三、智能信号处理,控制部分; 四、驱动控制信号预处理部分; 五、功率驱动开关部分。 下面我们先来看看此电路最核心的部分:PIC16F72组成的单片机智能处理、控制部分,因为其他电路都是为其服务或被其控制,弄清楚这部分,其它电路就比较容易明白。 图3:PIC16F72在控制器中的各引脚应用图 我们先来简单介绍一下PIC16F72的外部资源:该单片机有28个引脚,去掉电源、复位、振
荡器等,共有22个可复用的IO口,其中第13脚是CCP1输出口,可输出最大分辨率达10BIT 的可调PWM信号,另有AN0-AN4共5路AD模数转换输入口,可提供检测外部电路的电压,一个外部中断输入脚,可处理突发事件。内部软件资源我们在软件部分讲解,这里并不需要很关心。 各引脚应用如下: 1:MCLR复位/烧写高压输入两用口 2:模拟量输入口:放大后的电流信号输入口,单片机将此信号进行A-D转换后经过运算来控制PWM的输出,使电流不致过大而烧毁功率管。正常运转时电压应在0-1.5V左右 3:模拟量输入口:电源电压经分压后的输入口,单片机将此信号进行A-D转换后判断电池电压是否过低,如果低则切断输出以保护电池,避免电池因过放电而损坏。正常时电压应在 3V以上 4:模拟量输入口:线性霍尔组成的手柄调速电压输入口,单片机根据此电压高低来控制输出给电机的总功率,从而达到调整速度的目的。 5:模拟/数字量输入口:刹车信号电压输入口。可以使用AD转换器判断,或根据电平高低判断,平时该脚为高电平,当有刹车信号输入时,该脚变成低电平,单片机收到该信号后切断给电机的供电,以减少不必要的损耗。 6:数字量输入口:1+1助力脉冲信号输入口,当骑行者踏动踏板使车前行时,该口会收到齿轮传感器发出的脉冲信号,该信号被单片机接收到后会给电机输出一定功率以帮助骑行者更轻松地往前走。 7:模拟/数字量输入口:由于电机的位置传感器排列方法不同,该口的电平高低决定适合于哪种电机,目前市场上常见的有所谓120°和60°排列的电机。有的控制器还可以根据该口的电压高低来控制起动时电流的大小,以适合不同的力度需求。 8:单片机电源地。 9:单片机外接振荡器输入脚。 10:单片机外接振荡器反馈输出脚。 11:数字输入口:功能开关1 12:数字输入口:功能开关2 13:数字输出口:PWM调制信号输出脚,速度或电流由其输出的脉冲占空比宽度控制。 14:数字输入口:功能开关3 15、16、17:数字输入口:电机转子位置传感器信号输入口,单片机根据其信号变化决定让电机的相应绕组通电,从而使电机始终向需要的方向转动。这个信号上面讲过有120°和60°之分,这个角度实际上是这三个信号的电相位之差,120°就是和三相电一样,每个相位和前面的相位角相差120°。60°就是相差60°。 18:数字输出口:该口控制一个LED指示灯,大部分厂商都将该指示灯用作故障情况显示,当控制器有重大故障时该指示灯闪烁不同的次数表示不同的故障类型以方便生产、维修。 19:单片机电源地。 20:单片机电源正。上限是5.5V。 21:数字输入口:外部中断输入,当电流由于意外原因突然增大而不在控制范围时,该口有低电平脉冲输入。单片机收到此信号时产生中断,关闭电机的输出,从而保护重要器件不致损坏或故障不再扩大。 22:数字输出口:同步续流控制端,当电流比较大时,该口输出低电平,控制其后逻辑电路,使同步续流功能开启。该功能在后面详细讲解。 23--28:数字输出口:是功率管的逻辑开关,单片机根据电机转子位置传感器的信号,由这里输出三相交流信号控制功率MOSFET开关的导通和关闭,使电机正常运转。
电动汽车用驱动电机系统的现状及发展趋势
电动汽车用驱动电机系统的现状及发展趋势 中国汽车技术研究中心窦汝振李磊宋建锋 摘要:介绍了我国电动汽车用驱动电机系统的研发现状,以及车用系统与普通工业用系统间的差异,指出了发展趋势。 1 引言 我国汽车工业的发展面临着来自能源安全、环境保护和气候变化等可持续发展要求的多重挑战。随着近几年汽车保有量的快速增加,汽车能源消耗增长呈现加速趋势,进一步加剧了我国石油供需矛盾。在当前石油资源日益紧张,价格不断攀升的国际形势下,发展电动汽车特别是混合动力汽车是缓解我国石油资源短缺现状的有效途径,也是增强我国汽车工业核心竞争力的重大战略举措。 经过“八五”、“九五”规划的实施,特别是“十五”国家863电动汽车重大专项,我国已实现了官、产、学、研的资源整合,具有了电动汽车用驱动电机系统自主研发能力。在国家“三纵三横”总体布局中(如附图所示),驱动电机及其控制系统被列为“三横”中的共性技术之一。 附图国家“十五”电动汽车重大专项布局示意 2 电动汽车用驱动电机系统的特点及分类 电动汽车对驱动电机系统的要求至少包括: (1)基速以下输出大转矩,以适应车辆的启动、加速、负荷爬坡、频繁起停等复杂工况; (2)基速以上为恒功率运行,以适应最高车速、超车等要求; (3)全转速运行范围内的效率最优化,以提高车辆的续驶里程; (4)结构坚固、体积小、重量轻、良好的环境适应性和高可靠性; (5)低成本及大批量生产能力。 电动汽车最早采用了直流电机系统,特点是成本低、控制简单,但重量大,需要定期维护。随电力电子技术、自动控制技术、计算机控制技术的发展,包括异步电机及永磁电机在内的交流电机系统体现出比直流电机系统更加优越的性能,目前已逐步取代了直流电机控制系统。特别是借助于设计方法、开发工具及永磁材料的不断进步,用于驱动的永磁同步电动机得到了飞速发展。 电动汽车中常用的交流电机主要有异步、永磁、开关磁阻三大类型,其特点如表1所示。
基于TMS320F28035电动汽车电机控制器
2011-2012德州仪器C2000及MCU创新设计大赛 项目报告 题目:基于TMS320F28035电动汽车用电机控制器 学校:重庆大学 组别:专业组 应用类别:先进控制类 平台: C2000 题目:基于TMS320F28035电动汽车电机控制器 摘要:21世纪,纯电动汽车已经成为了解决燃油车辆带来的能源和环境问题的 最有希望的方案之一。而电动汽车电机控制器又是纯电动汽车的核心部分。本设 计以TI公司的TMS320F28035为控制核心,设计了一款用于电动汽车的低压电机 控制器,采用先进的弱磁控制算法和效率优化策略,实现了电机在整个运行范围 内输出最大转矩和达到较高的效率。 Abstract:ELECTRIC vehicles (EV) are seen as a possible step towards the solution of the pollution problem in urban environment. And the motor controller is core of the electric vehicle. Based on TMS320F28035 ,we design a motor controller used in low voltage EV. With the advanced control
scheme ,we can get the maximum torque in the whole speed range and the maximum efficiency. 1引言 1.1系统设计的背景 20世纪90年代以来,汽车作为人类最重要的代步和交通工具,在全球范围内得到蓬勃快速发展。其实世界汽车工业总共发展了100多年,已经成为世界上许多国家的支柱产业,在人类经济生活和生产中发挥着举足轻重的作用。进入21世纪,在今后的50年里,全球人口将从60亿增加到100亿,汽车的数量将从7亿增加到25亿。如果这些车辆使用内燃机的话,他们所需要的石油将不可估量,它们所排出的尾气将无法处理,它们将对我们的环境造成巨大的伤害。这些问题迫使人们去寻找21世纪可持续发展的道路交通工具。另外,由于能源资源日益消耗,迫使人们重新考虑未来汽车的动力来源,世界各国都竞相积极地研制新能源汽车,从而来替代燃料汽车。由于新能源汽车清洁无污染,能源形式多样并且能量比重高,结构简单而且维护方便,是21世纪最有发展潜力的汽车。 近二十多年来,西方工业发达国家政府把电动汽车的研究开发看作解决环境问题和能源问题的一种有效手段,在经济上给予大力支持。美国政府至今已出资数百亿美元支持汽车厂商和相关厂商进行电动汽车技术的开发研究。美国三大汽车公司1991年联合成立了美国先进电池联合体,投入了4.5亿美元,其中政府拨款2.25亿美元,共同开发镍镉、镍氢、锌空气电池、燃科电池等各种高性能蓄电池。日、法、德等国各大公司也投入巨资研究开发高性能电池。在电动汽车整车研究开发方面,至90年代末期,国外大汽车公司已开发生产了100多种型号的纯电动汽车、燃料电动汽车和混合动力汽车(表1)。其中,已有10多种纯电动汽车车型投入商业化生产;近年来,燃料电池电动汽车成为新的开发热点,美国计划到2010年市场上燃料电池汽车占市场4%份额,达到60万辆,日本政
超静音智能型无刷电动车控制器接线说明
、超静音智能型无刷电动车控制器接线说明: 1、电源线为6.3-3AY三根线,红,红,黑。接48v电压。 2、电机线为黄,绿,蓝三根线,一般情况是相应的颜色接相应的线,如果转的声音很大,可以把这三根线调换位置接一下。 3、霍尔信号线为2.8-6AY五根线,一般情况是相应的颜色接相应的线。红,黑,黄,绿,蓝。 4、反相充电为2.8-2AY二根线,红,黑。 5、调速线为sm-3AY三根线,红,黑,灰。 6、1:1助力线为sm-3AY三根线,红,黑,绿。 8、刹车线为sm-2AY二根线,黑,紫。 7、巡航线相当于转把线sm-2AY二根线,红,黑。 9、限速线为二根单独的白色线,当把这二根线接上时,无论转把转的位置多大,速度也不会变快,保持一定速度。 10、 ABS为二根单独的绿色线,当把这二根线接上时,按下刹车,电动自行车的电机马上停转,如果不接,滑行时按下刹车,由于惯性,会向前滑行一段距离。 首先电动车要转起来,基本的连线就是电机相线(三根线:黄、绿、蓝)接上控制相线(三根线:黄、绿、蓝)、电机霍尔线(五根线:红、黑、黄、绿、蓝)接上控制器霍尔线(五根线:红、黑、黄、绿、蓝),电池(两根线加AAC线:红、红、黑)接上控制器的电源端子(两根线加AAC线:红、红、黑),调速把接控制器的调速端子,接好这四个基本连线(还要考虑相序问题),就可以转起来了。 另外还有助力线(三根:红、黑、白),限速端子等。其他的功能线可以通过合端子分辩出来。深圳市士金技术的电动车检修匹配仪可以用来检修和帮助接线。1分20秒可以从36种接法中选出最佳接线方式。 中国惯用(通用)的颜色:主电源线黑色-负极,红色+正极(最粗的那两根根)比这两根稍稍细点的一般是充电线路,注意红黑不能接错,不然严重的烧毁车子,运气好的话烧毁线路。粗点,硬的三根线(一般为黄蓝绿三色)是电机线,作用是相位线,可以随便接,主要是转的方向要注意,不然就有了倒车功能了呵呵,和这三根线在一起的是五根小线,红黑在上面两个是电源线不能接反颜色要一致,下面三根黄蓝绿是信号线(也叫:霍尔线)可以随便接,原理与三根电机线一样。其他的线路要通过万用表测量,分别是:喇叭,大灯,转向灯,尾灯,刹车灯,有些带助力的还有助力线。颜色各个厂家采用的不一样,只有通过万用表测。 无刷电动车控制器接线说明 1.电源输入 粗红色线为电源正端黑色线为电源负端细橙色线为电门锁
电动汽车电机控制器
电动汽车电机控制器 一、电机控制器的概述 根据GB/T18488.1-2001《电动汽车用电机及其控制器技术条件》对电机控制器的定义,电机控制器就是控制主牵引电源与电机之间能量传输的装置、是由外界控制信号接口电路、电机控制电路和驱动电路组成。 电机、驱动器和电机控制器作为电动汽车的主要部件,在电动汽车整车系统中起着非常重要的作用,其相关领域的研究具有重要的理论意义和现实意义。 二、电机控制器的原理 图1汽车电机控制器原理图 电机控制器作为整个制动系统的控制中心,它由逆变器和控制器两部分组成。逆变器接收电池输送过来的直流电电能,逆变成三相交流电给汽车电机提供电源。控制器接受电机转速等信号反馈到仪表,当发生制动或者加速行为时,控制器控制变频器频率的升降,从而达到加速或者减速的目的。 三、电机控制器的分类 1、直流电机驱动系统 电机控制器一般采用脉宽调制(PWM)斩波控制方式,控制技术简单、成熟、成本低,但效率低、体积大等缺点。 2、交流感应电机驱动系统 电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速,采用矢量控制或直接转矩控制策略实现电机转矩控制的快速响应。 3、交流永磁电机驱动系统 包括正弦波永磁同步电机驱动系统和梯形波无刷直流电机驱动系统,其中正弦波永磁同步电机控制器采用PWM方式实现高压直流到三相交流的电源变换,采用变频调速方式实现电机调速;梯形波无刷直流电机控制通常采用“弱磁调速”方式实现电机的控制。由于正弦波永磁同步电机驱动系统低速转矩脉动小且高速恒功率区调速更稳定,因此比梯形波无刷直流电机驰动系统具有更好的应用前景。
4、开关磁阻电机驱动系统 开关磁阻电机驱动系统的电机控制一般采用模糊滑模控制方法。目前纯电动汽车所用电机均为永磁同步电机,交流永磁电机采用稀土永磁体励磁,与感应电机相比不需要励磁电路,具有效率高、功率密度大、控制精度高、转矩脉动小等特点。 四、电动控制器的相关术语 1、额定功率:在额定条件下的输出功率。 2、峰值功率:在规定的持续时间内,电机允许的最大输出功率。 3、额定转速:额定功率下电机的转速。 4、最高工作转速:相应于电动汽车最高设计车速的电机转速。 5、额定转矩:电机在额定功率和额定转速下的输出转矩。 6、峰值转矩:电机在规定的持续时间内允许输出的最大转矩。 7、电机及控制器整体效率:电机转轴输出功率除以控制器输入功率再乘以100%。
电动车无刷电机控制器软件设计详解
电动车无刷电机控制器软件设计详解作者:谢渊斌原作发表在《电子报2007年合订本》下册版权保留,转帖请注明出处本文以MICROCHIP公司所生产的PIC16F72为基础说明软件编程方面所涉及的要点,此文所涉及的源程序均以PIC的汇编语言为例。由于软件不可避免需与硬件相结合,所以此文可能出现硬件电路图或示意图。本文适合在单片机编程方面有一定经验的读者,有些基础知识恕不一一介绍。我们先列一下电动车无刷马达控制器的基本要求:功能性要求:1.电子换相2.无级调速3.刹车断电4.附加功能a.限速b.1+1助力c.EBS柔性电磁刹车d.定速巡航e.其它功能(消除换相噪
音,倒车等)安全性要求:1.限流驱动2.过流保护3.堵转保护3.电池欠压保护4.节能和降低温升5.附加功能(防盗锁死,温升限制等)6.附加故障检测功能从上面的要求来看,功能性要求和安全性要求的前三项用专用的无刷马达驱动芯片加上适当的外围电路均不难解决,代表芯片是摩托罗拉的MC33035,早期的控制器方案均用该集成块解决。但后来随着竞争加剧,很多厂商都增加了不少附加功能,一些附加功能用硬件来实现就比较困难,所以使用单片机来做控制的控制器迅速取代了硬件电路芯片。但是硬件控制和软件控制有很大的区别,硬件控制的反应速度仅仅受限于逻辑门的开关速度,而软件的运
行则需要时间。要使软件跟得上电机控制的需求,就必须要求软件在最短的时间内能够正确处理换相,电流限制等各种复杂动作,这就涉及到一个对外部信号的采样频率,采样时机,信号的内部处理判断及处理结果的输出,还有一些抗干扰措施等,这些都是软件设计中需要再三仔细考虑的东西。PIC16F72是一款哈佛结构,精简指令集的MCU,由于其数据总线和指令总线分开,总共35条单字指令,0-20M的时钟速度,所以其运算速度和抗干扰性能都非常出色,2K 字长的FLASH程序空间,22个可用的IO 口,同时又附加了3个定时/计数器,5个8位AD口,1个比较/捕捉/脉宽调制器,8个
电动车无刷控制器硬件电路详解
电动车无刷马达控制器硬件电路详解 2008-5-10 9:47:25 电动车无刷电机是目前最普及的电动车用动力源,无刷电机长寿,免维护的特点得到广泛应用,然而由于其使用直电刷,其换向控制相对有刷电机要复杂许多,同时由于电动又使用电池作电源,因此控制器自身的保护及对电机,电器提出更多要求。 自电动车用无刷电动机问世以来,其控制器发展分两个阶用专用无刷电动机控制芯片为主组成的纯硬件电路控制器单,其中控制芯片的代表是摩托罗拉的MC33035,这个不以也不作深入介绍。第二阶段是以MCU为主的控制芯片。的重点,在MCR版本的设计中,揉和了模拟、数字、大功等许多重要应用,结合MCU智能化控制,是一个非常有启今以应用最广泛的以PIC16F72为智能控制中心,350W的机电路如图1:
图1:350W整机电路图 整机电路看起来很复杂,我们将其简化成框图再看看:
图2:电路框图 电路大体上可以分成五部分: 一、电源稳压,供应部分; 二、信号输入与预处理部分; 三、智能信号处理,控制部分; 四、驱动控制信号预处理部分; 五、功率驱动开关部分。 下面我们先来看看此电路最核心的部分:PIC16F72组成的控制部分,因为其他电路都是为其服务或被其控制,弄清路就比较容易明白。
图3:PIC16F72在控制器中的各引脚应用图 我们先来简单介绍一下PIC16F72的外部资源:该单片机电源、复位、振荡器等,共有22个可复用的IO口,其中输出口,可输出最大分辨率达10BIT的可调PWM信号,另路AD模数转换输入口,可提供检测外部电路的电压,一个可处理突发事件。内部软件资源我们在软件部分讲解,这里各引脚应用如下: 1:MCLR复位/烧写高压输入两用口 2:模拟量输入口:放大后的电流信号输入口,单片机将换后经过运算来控制PWM的输出,使电流不致过大而烧毁时电压应在0-1.5V左右 3:模拟量输入口:电源电压经分压后的输入口,单片机转换后判断电池电压是否过低,如果低则切断输出以保护过放电而损坏。正常时电压应在3V以上 4:模拟量输入口:线性霍尔组成的手柄调速电压输入口压高低来控制输出给电机的总功率,从而达到调整速度的
电动汽车电机控制器国内外发展现状
电动汽车驱动电机与电机控制器国内外发展现状 1、国外驱动电机在新能源汽车上的应用 电机方面: 全球范围看,有刷直流电机、一般同步电机、感应电机与有刷磁铁电机商品化历史最长,产品更新换代不断,迄今还在应用。上世纪80 年代开始进入商品化的表面永磁同步电机与1990 年代以来研制开发的开关磁阻电机、内置式永磁同步电机以及最新的同步磁阻电机相继进入市场,并在电动汽车与混合动力汽车上获得应用。 根据电动汽车、混合动力车车型的开发应用年代,日本的产业水平与市场偏好,成本核算等方面考虑,先采用感应电机,而近几年来在批量生产的日本电动汽车车型上以采用永磁同步电机为主流。 近年来美、欧开发的电动汽车多采用交流感应电机。其主要优点是价格较低,性能可靠;缺点是起动转矩小。日本近年来问世的电动汽车与新型混合动力车大多采用永磁电机。其主要优点是效率比交流感应电机高,但价格较贵。永磁材料耐热温度低于120℃,而开关磁阻电机(SRM:Switched Reluctance Motor)结构新型、简单、起动性能好,无大的冲击电流,但噪声大。 驱动电机系统的驱动方式与控制方面: 车辆的电机驱动系统的驱动方式可分为集中驱动与车轮独立驱动。集中驱动结构简单,可以沿用内燃机汽车的部分传动装置,是目前应用最多的电驱动方式,容易处理电机冷却、防振以及电磁干扰等问题。但是集中驱动传动系统复杂、传动效率低,不能对两侧驱动轮转矩进行单独控制,影响车辆的操纵稳定性。 车轮独立驱动的范例是三菱汽车公司应用开发的轮毂电机电动汽车,和日产汽车公司开发的轮毂电机电动汽车。 车轮独立驱动的优点是简化传动系统,布置方便;由于每个电机可以单独控制,能实现车轮驱动力的单独调节和施加横摆力矩控制,容易实现车辆底盘系统的电子控制,改善车辆驱动性能和行驶性能。但轮毂电机驱动系统会使车轮质量过大,对于整车动力性能造成影响,还可能带来其它问题,如电机散热、防水、防尘难度大等。 正因为上述问题,三菱在推出新一代电动汽车“iMiEV”时,不再采用轮毂电机,仍采用集中驱动系统,驱动电机采用永磁电机。 至于电机驱动系统的控制,涉及到电压波形与调制率控制、矩形波电压相位控制、直流电流失调反馈(DC offset feedback)控制,与可变电压系统控制。此外,在电机控制的硬件方面,例如混合动力车用电机控制在100us 程度的抽样周期中必须进行多项控制计算,再加上保险失效处理功能(fail safe),其编制程序极其繁复。 从驱动系统的实际应用中,因为仍以传统的集中驱动方式作为主流,而永磁电机由于其优点突出,在日本纯电动汽车与混合动力车上得到更多应用。而从成本角度来看,采用集中驱动可以尽可能沿用基型车的车身和悬架而降低成本,往往比采用轮毂电机驱动系统成本低。而iMiEV 纯电动车采用传统的集中驱动系统,即驱动方式通过减速器、差速器、驱动轴把电机输出扭矩传递到左右车轮,驱动车辆行驶。 2、国内驱动电机行业现状 电机业中的小行业、但制造门槛高 作为电机行业的细分领域,电动汽车驱动电机是一个小行业。主要是由于市场处于起步
电动汽车用永磁同步电机控制系统设计
硕士学位论文 二0一五 年 六 月 作者姓名 指导教师 学科专业 控制工程
摘要 本文在开始先介绍了研究电动汽车的背景及其意义,并介绍了电动汽车在国内外的发展现状,然后从电动汽车的燃油经济性,驱动性,安全性及舒适度,三个方面分析了电动汽车比其他燃料汽车存在的优越性。电动机是电动汽车的核心部件,本文中从其驱动方式把电动机分为四大类,直流有刷电动机,永磁同步电动机,永磁无刷直流电动机和开关磁阻电动机。本章从工作原理与性能方面分析了,这四种电动机各存在的优点和不足。从中得出永磁同步电动机是电动汽车比较理想的选择。本文刚开始介绍了永磁同步电动机PMSM的三种不同的控制方式,恒压频比控制,矢量控制,直接转矩控制,并从三者之间比较得出,PMSM采用直接转矩控制DTC的方式有着比其他两者更好的稳定性。 随后从永磁同步电动机PMSM的结构及其特点,分析了其优越性,并建立数学模型,根据空间矢量坐标关系推导出PMSM的在各坐标系下DTC的原理。本章分析了定子磁链与电磁转矩的估算和滞环控制,通过其原理研究了开关表控制的方式,并对PMSM的直接转矩控制DTC的Matlab/Simulink仿真,最终得出了DTC 较其它控制方式的稳定性。 其次分析了永磁同步电机PMSM的直接转矩控制DTC存在的诸多缺点,并提出基于SVM技术的SVPWM的控制方式,即空间矢量调制DTC控制策略,通过Matlab/Simulink仿真,得出SVPWM比PMSM DTC有着更好的稳定性。 TI公司推出的TMS320F2812 DSP芯片的控制系统设计,从硬件电路的设计和软件的设计,两个方面研究了该芯片。DSP硬件方面包含了智能模块的自保护特性,并设计了检测电路,保护电路,驱动电路和CAN通信等模块,软件系统方面分析了,其初始化流程图,接收流程图等。 关键词:永磁同步电机;直接转矩控制;DSP;SVPWM
纯电动汽车的驱动电机系统详解
纯电动汽车的驱动电机系统详解 驱动电机系统是电动汽车三大核心系统之一,是车辆行驶的主要驱动系统,其特性决定了车辆的主要性能指标,直接影响车辆动力性、经济性和用户驾乘感受。一、驱动电机系统介绍驱动电机系统由驱动电机、驱动电机控制器(MCU)构成,通过高低压线束、冷却管路与整车其他系统连接,如图1所示。整车控制器(VCU)根据加速踏板、制动踏板、挡位等信号通过CAN网络向电机控制器MCU发送指令,实时调节驱动电机的扭矩输出,以实现整车的怠速、加速、能量回收等功能。电机控制器能对自身温度、电机的运行温度、转子位置进行实时监测,并把相关信息传递给整车控制器VCU,进而调节水泵和冷却风扇工作,使电机保持在理想温度下工作。驱动电机技术指标参数,如表1所示,驱动电机控制器技术参数如表2所示。1、驱动电机永磁同步电机是一种典型的驱动电机(图2),具有效率高、体积小、可靠性高等优点,是动力系统的执行机构,是电能转化为机械能载体。它依靠内置旋转变压器、温度传感器(图3)来提供电机的工作状态信息,并将电机运行状态信息实时发送给MCU。旋转变压器检测电机转子位置,经过电机控制器内旋变解码器解码后,电机控制器可获知电机当前转子位置,从而控制相应的IGBT功率管导通,按顺序给定子三个线圈通电,驱
动电机旋转。温度传感器的作用是检测电机绕组温度,并提信息供给MCU,再由MCU通过CAN线传给VCU,进而控制水泵工作、水路循环、冷却电子扇工作,调节电机工作温度。驱动电机上有一个低压接口和三根高压线(V、U、W)接口,如图4所示。其中低压接口各端子定义如表3所示,电机控制器也正是通过低压端口获取的电机温度信息和电机 转子当前位置信息。2、驱动电机控制器驱动电机控制器MCU结构如图5所示,它内部采用三相两电平电压源型逆变器,是驱动电机系统的控制核心,称为智能功率模块,它以IGBT(绝缘栅双极型晶体管)为核心,辅以驱动集成电路、主控集成电路。MCU对所有的输入信号进行处理,并将驱动电机控制系统运行状态信息通过CAN2.0网络发送给整车控制器VCU。驱动电机控制器内含故障诊断电路,当电机出现异常时,达到一定条件后,它将会激活一个错误代码并发送给VCU整车控制器,同时也会储存该故障码和相关数据。驱动电机控制器主要依靠电流传感器(图6)、电压传感器、温度传感器来进行电机运行状态的监测,根据相应参数进行电压、电流的调整控制以及其它控制功能的完成。电流传感器用于检测电机工作实际电流,包括母线电流、三相交流电流。电压传感器用于检测供给电机控制器工作的实际电压,包括动力电池电压、12V蓄电池电压。温度传感器用于检测电机控制系统的工作温度,包括IGBT模块的温度。驱动电
电动车控制器接线图
电动车控制器接线图 电动车控制器接线说明 1.电源输入 粗红色线为电源正端 黑色线为电源负端 细橙色线为电门锁 2.电机相位(u、v、w输出) 粗黄色线为U 粗绿色线为V 粗蓝色线为W 3.转把信号输入 细红色线为+5V电源 细绿色为手柄信号输入 细黑色线为接地线 4.电机霍耳(A、B、C输入) 细红色线为+5V电源 细黑色线为接地线 细黄色线为 A 细绿色线为 B 细蓝色线为 C 5.刹车(柔性EABS+机械刹) 细黄色线为柔性EABS; 细蓝色线为机械刹(高电平刹车:+12V) 细黑色线为接地线(低电平刹车) 6.传感器 细红色线为+5V电源 细黑色线为接地线 细绿色线为传感器信号输入 7.仪表(转速):细紫色线 8.巡航:细棕色线 9.限速:细灰色线 10.自动识别开关线:细黄色线 PIC16F72智能型无刷电动车控制器使用方法和注意事项 1、在接线前先切断电源,按接线图所示连接各根导线; 2、该控制器应安装在通风、防水、防震部位。 3、控制器限速控制插头应放置容易操作的地方。 4、控制器接插件应接插到位,禁止将控制器电源正负极反接(即严禁粗红、细橙和粗黑;细红和细黑接反)。 5、电机模式自动识别:正确接好电动车控制器的电源、转把、刹把等线束,,将电机识别模式开关线(细黄)短接,打开电门锁,使电机进入自动识别状态,若电机反转则按一下刹车即可使电机正向转动,在控制器识别电机模式10秒后
将电机识别模式开关线(细黄)直接断开即可完成电机模式自动识别。 6、1+1助力方向调整:在通电状态,将调速电阻从最大值调到最小值,再回到原始状态后,可将1+1助力的方向从正向模式切换到反向模式,再调整一次可从反向模式切换到正向模式,并将最终的模式存入单片机。
电动汽车用车电机及控制器技术条件
ID号:9034790 受控文件归档日期:2009-04-21 09:13:27 编码:ID号:xxxxxxx 受控文件归档日期:2009-04-xx 编 码: JLYY-XX -09 电动汽车用电机及控制器 技术条件 编制: 校对: 审核: 审定: 标准化: 批准: 浙江吉利汽车研究院有限公司 二○○九年五月
前言 为了规范电动汽车用电机及控制器的技术特性,控制驱动电机及控制器系统质量和出厂检验规则编制了本标准。 本标准由浙江吉利汽车研究院有限公司提出。 本标准由浙江吉利汽车研究院有限公司新能源技术开发部负责起草。 本标准主要起草人:刘波。 本标准于2009年5月13日发布并实施。
1 范围 本标准规定了吉利电动汽车使用的电机及控制器型号、要求、检验规则、标志、随车技术文件、包装、运输、贮存及质量承诺。 本标准适用于吉利电动汽车用的驱动电机及其控制器。 2 规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。 GB 755-200 旋转电机定额和性能 GB/T 2423.17-1993 电工电子产品基本环境试验规程试验Ka:盐雾试验方法 GB/T 4772.1-1999 旋转电机尺寸和输出功率等级第1部分:机座号56~400和凸缘号55~1080 GB/T 4942.1-1985 电机外壳防护分级 GB/T 4942.2-1993 低压电器外壳防护等级 GB 10068.2-2000 轴中心高为56 mm及以上电机的机械振动—振动的测量、评定及限值 GB 10069.3-1988 旋转电机噪声测定方法及限值噪声限值 GB/T 12665-1990 电机在一般环境条件下使用的湿热试验要求 GB/T 12668-1990 交流电动机半导体变频调速装置总技术条件 GB 1471l-1993 中小型旋转电机安全通用要求 GB/T 17619-1998 机动车电子电器组件的电磁辐射抗扰性限值测量方法 GB/T 18488.2-2001 电动汽车用电机及其控制器试验方法 GB/T 2900.25-1994 电工术语旋转电机 GB/T 2900.26-1995 电工术语控制电机 GB/T 2900.33-1993 电工术语电力电子技术 GB/T 10069.1-2006 旋转电机噪声测定方法及限值第1部分:旋转电机噪声测定方法 GB 10069.3 旋转电机噪声测定方法及限值第3部分:噪声限值 GB/T 18488.1-2001 电动汽车用电机及其控制器技术条件 GB/T 18488.2-2001 电动汽车用电机及其控制器试验方法 3 定义
电动车无刷控制器电机线和霍尔线常规接法
针对目前控制器普通版本和标准版本需要对相序给出常规接法(本公司智能自学习版本无需对相序),?? 无刷电机为3相6拍控制,因此3根霍尔状态对应3根电机线6种输出状态,不同组合有36种接法,其中有6种接法能让电机运转正常,且这6种接法里有3种接法是正转另3种接法是反转。所以我们有必要掌握接线规则。 一:首先我们得让电机正常转起来,通常是霍尔插头直接插上,调整电机线。 以下给出6种规律接法,必定有1种能让电机运转正常 1》电机线蓝色对控制器蓝色电机线绿色对控制器绿色电机线黄色对控制器黄色 2》电机线蓝色对控制器蓝色电机线绿色对控制器黄色电机线黄色对控制器绿色 3》电机线黄色对控制器黄色电机线蓝色对控制器绿色电机线绿色对控制器蓝色 4》电机线绿色对控制器绿色电机线蓝色对控制器黄色电机线黄色对控制器蓝色 5》电机线蓝色对控制器黄色电机线黄色对控制器绿色电机线绿色对控制器蓝色 6》电机线黄色对控制器蓝色电机线蓝色对控制器绿色电机线绿色对控制器黄色 总结以上规律我们可以编出一套顺口溜方便记忆 一般控制器是放在上方的,电机是放在下方的,我们可以这么记忆 1》颜色对颜色 2》蓝对蓝,其它2色对调 3》黄对黄,其它2色对调 4》绿对绿,其它2色对调 5》上蓝对下蓝,其它2色对调 6》上黄对下蓝,其它2色对调 霍尔有正有反,说明该电机是60°相位角,没有正反就是120°相位角。你可按原样放入(可稍稍用502瞬间胶固定)将三个霍尔的正极和负极分别并联后与电机引出线中细的红、黑线相连焊接(注意绝缘)将三个霍尔的信号线分别与电机引出线中细的黄、绿,蓝线相连焊接(注意绝缘)。
二:以上接法能让电机运转正常,但不一定是正转,如果你要调成正转可将电机线A相C相对调,霍尔线A相B相对调。 无刷电机相角的判断 无刷电机的相角是无刷电机的相位代数角的简称,指无刷电机各线圈在一个通电周期里面线圈内部电流方向改变的角度。电动车用无刷电机常见的相位代数角有120°与60°两种。 □观察霍耳元件安装空间位置判断无刷电机的相角 120°和60°两种相角电机的霍耳元件安装空间位置不一样。 □测量霍耳真值信号判断无刷电机的相角 在此需要先说明一下的是什么叫无刷电机的磁拉力角.无刷电机的磁钢数量一般是 12片、16片或18片,其对应的定子槽数是36槽、48槽或54槽。电机在静止状态时,转子磁钢的磁力线有沿磁阻最小方向行走的特性,因此转子磁钢所停顿的位置恰好为定子槽凸极的位置。磁钢不会停在定子槽心的位置,这样转子与定子的相对位置只有36种、48种或54种这有限的几个位置。因此无刷电机的最小磁拉力角就是360/36°、360/48°或360/54°。
通用型无刷电机控制器接线说明
刷电动车控制器接线说明 1.电源输入 粗红色线为电源正端黑色线为电源负端细橙色线为电门锁 2.电机相位(u、v、w输出) 粗黄色线为U 粗绿色线为V 粗蓝色线为W 3.转把信号输入 细红色线为+5V电源细绿色为手柄信号输入细黑色线为接地线 4.电机霍耳(A、B、C输入) 细红色线为+5V电源细黑色线为接地线 细黄色线为 A 细绿色线为 B 细蓝色线为 C 5.刹车(柔性EABS+机械刹) 细黄色线为柔性EABS;细蓝色线为机械刹(高电平刹车:+12V) 细黑色线为接地线(低电平刹车) 6.传感器 细红色线为+5V电源细黑色线为接地线细绿色线为传感器信号输入 7.仪表(转速):细紫色线 8.巡航:细棕色线 9.限速:细灰色线 10.自动识别开关线:细黄色线 PIC16F72智能型无刷电动车控制器使用方法和注意事项 1、在接线前先切断电源,按接线图所示连接各根导线; 2、该控制器应安装在通风、防水、防震部位。 3、控制器限速控制插头应放置容易操作的地方。 4、控制器接插件应接插到位,禁止将控制器电源正负极反接(即严禁粗红、细橙和粗黑;细红和细黑接反)。 5、电机模式自动识别:正确接好电动车控制器的电源、转把、刹把等线束,,将电机识别模式开关线(细黄)短接,打开电门锁,使电机进入自动识别状态,若电机反转则按一下刹车即可使电机正向转动,在控制器识别电机模式10秒后将电机识别模式开关线(细黄)直接断开即可完成电机模式自动识别。 6、1+1助力方向调整:在通电状态,将调速电阻从最大值调到最小值,再回到原始状态后,可将1+1助力的方向从正向模式切换到反向模式,再调整一次可从反向模式切换到正向模式,并将最终的模式存入单片机
电动汽车电机及控制器性能测试系统
电动汽车电机及控制器性能测试系统 1 电机驱动系统的作用 电机驱动系统是电动汽车的核心,它与整车动力性能的好坏密切相关,是电动汽车关键技术之一。电机驱动系统由电动机和驱动控制器两部分组成。电动机是一种将电能转变为机械能的装置,为满足整车动力性能的需求,要求其具有瞬时功率大、过载能力强、加速性能好、使用寿命长、调速范围广、减速时实现再生制动能量回馈、效率高、可靠性高等特点。驱动控制器是将电池的电量转变为适于电动机运行的另一种电能变换控制装置。通过这种变换和控制使电动机处于最佳工作状态,以满足电动汽车实际行驶工况的需要,驱动控制器要求结构简单、控制精度高、动态响应好、系统高可靠、成本低。驱动电机及其控制器的性能好坏直接决定车辆的品质好坏,所以在试验室中正确地进行试验是必要的。 2 电机控制器性能测试设备 2.1 实验设备目前常用的测功机主要有直流电力测功机、交流电力测功机、电涡流测功机和水力测功机。直流电力测功机:由直流电机、测力计和测速发电机组合而成。直流电机的定子由独立的轴承座支承。它可以在某一角度范围内自由摆动。机壳上带有测力臂,它与测力计配合,可以检测定子所受到的转矩。转轴上的转矩可以由定子上量测。与直流电机类似,直流测功机调速性能好,控制简单,但由于换向器的原因,不适合高速运行,而且大功率的测功机相对于其他类型,体积较大。不适用于动力电机测试。交流电力测功机:由 1 台三相交流电动机和测
力计、测速发电机组成。它的测功原理与直流测功机相同,但不存在换向问题,结构简单,可靠性高。目前交流测功机在动、静态性能上已经得到了很大提高。电力测功机既可以进行电动性能测试,也可以进行馈电性能的测试。 2.2 测试方法 通过安装夹具及联轴器将被测电机与测功机连接,适当调整使轴与轴的对中度符合试验要求,对个别超高速电机,为防止试验过程中因为轴振动或对中不够精确引起轴承发热失效或者损坏电机的情况,可以考虑在适当位置安装振动传感器及温度传感器,对试验过程中局部情况实时监测,一旦有异常立即停止。针对标准的要求,试验时测试额定及峰值负载下的转速,转矩和效率特性,以及额定负载下的馈馈电特性。温升试验也是在台架上进行,分别测量电机绕组的温升和控制器的温升。电机和控制器都配备有散热系统,或水冷或风冷。电机及控制器从冷机状态下启动开始工作,温度会随之慢慢增加,在固定负载的情况下,温度最终会趋于稳定,这段时间内温度的变化量就是温升值。标准中有3种方法:电阻法、埋置检温计(ETD法和温度计法。试验电机不宜拆开。因此选用电阻法比较适合,通过比较试验前后环境温度、冷却水温度以及绕组直流电阻的变化来计算电机不同工况下的温升值。控制器的温升通过温度计即可测量。温升值根据不同产品的工作制要求进行测试。用在不同类型系统上的电机应选用不同的工作制,比如纯电动汽车,串联式、并联式以及混联式混合动力汽车,PLUG-IN混合动力汽车等不同类型的应用。在该项目中,标准里除了对温升值的要求外,对试验过程中电
无刷电机控制器基本原理
无刷电机控制器基本原理 电动车采用的电机分有刷电机和无刷电机两种,由于无刷电机具有噪声低、寿命长的特点,因而在电动车中获得比较广泛应用。无刷电机的控制器要比有刷电机控制器复杂得多,在维修上有一定的难度,因此,本文从无刷控制器的原理入手介绍维修要点,以期对广大维修爱好者有所帮助。 基本原理 电动车无刷控制器主要由单片机主控电路、功率管前级驱动电路、电子换向器、霍尔信号检测电路、转把信号电路、欠电检测电路、限流/过流检测电路、刹车信号电路、限速电路、电源电路等部分组成,其原理框图如图1所示,下面介绍主要电路的工作原理。 1. 电子换向器 无刷电机与有刷电机的根本区别就在于无刷电机用电子换向器代替了有刷电机的机械换向器,因而控制方法也就大不相同,复杂程度明显提高。在无刷电机控制器中,用6个功率MOSFET管组成电子换向器,其结构如图2所示。图中MOSFET管VT1、VT4构成无刷电机A相绕组的桥臂,VT3、VT6 构成无刷电机B相绕组的桥臂,VT5、VT2构成无刷电机C相绕组的桥臂,在任何情况,同一桥臂的上下两管不能同时导通,否则要烧坏管子。 6只功率MOSFET管按一定要求顺次导通,就可实现无刷电机A、B、C 三相绕组的轮流通电,完成换相要求,电机正常运转。在电动车无刷电机控制器中,这6只功率管有二二通电方式和三三通电方式的运用,二二通电方式即每一瞬间有两只功率管同时通电,三三通电方式即每一瞬间有三只功率管同时通电。对于二二通电方式,功率管须按VT1、VT2;VT2、VT3;VT3、VT4;VT4、VT5;VT5、VT6;VT6、VT1;VT1、VT2??的通电顺序,电机才能正常运转。对于三三通电方式,功率管须按VT1、VT2、VT3;VT2、VT3、VT4;VT3、VT4、VT5;VT4、VT5、VT6;VT5、VT6、VT1; VT6、VT1、VT2;VT1、VT2 、VT3??的次序通电,电机才能正常运转。