四连杆受力分析
四连杆受力分析
不计摩擦时机构的受力分析根据机构所受已知外力(包括惯性力)来确定个运动副中的反力和需加于该机构上的平衡力。由于运动副反力对机构来说是内力,必须将机构分解为若干个杆组,然后依次分析。
——与作用于机构构件上的已知外力和惯性力相平衡的未知外力(矩)相平衡的未知外力(矩)已知生产阻力平衡力(矩)——求解保证原动件按预定运动规律运动时所需要的驱动力(矩)已知驱动力(矩)平衡力(矩)——求解机构所能克服的生产阻力一. 构件组的静定条件——该构件组所能列出的独立的力平衡方程式的数目.
一.构件组的静定条件
——垓构件纽斯能列出的強立的力平衞方程式的数目, 应等于构件组中原有力的未知娶素的数目。
独丈的力平衡方程丸的<β =所有力的来知要素的AQO
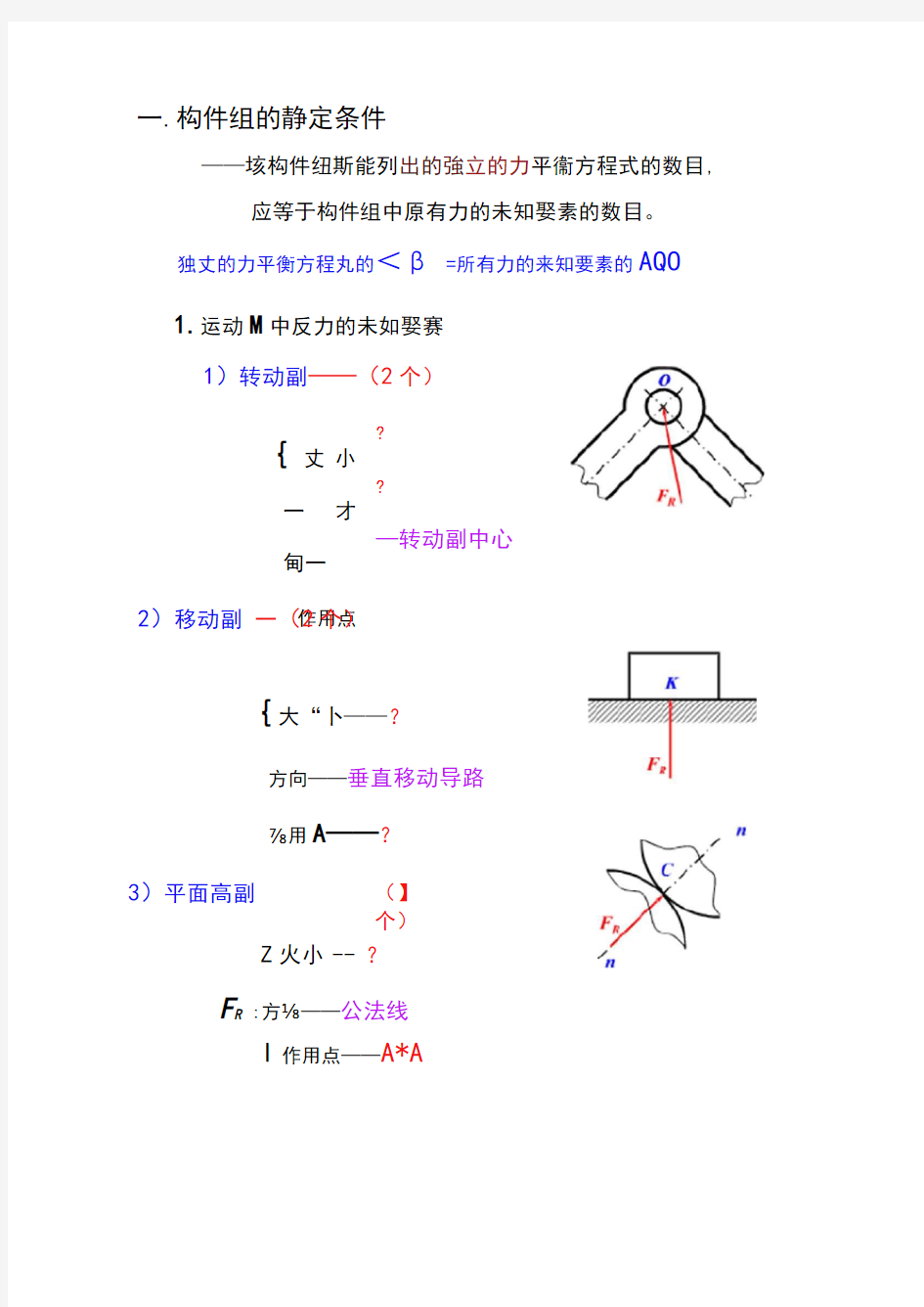
1.运动M中反力的未如娶赛
1)转动副——(2个)
{丈小一才甸一
作用点?
?
—转动副中心
2)移动副一(2个)
{大“卜——?
方向——垂直移动导路
?用A——?
3)平面高副(】
个)
Z火小-- ?
F R :方?——公法线
I作用点——A*A
2 ?构件组的静定条件
设某构件组共有"个构件、刃个低副、/个高副
>一个构件可以列出3个砂立的力平衡方程,〃个构件共有%个力平衡方程
>一个平面低副引入2个力的未知数,竹个低副共引入2刃个力的未知数
>一个平面高副引入1个力的未知数,几个低副共引入几个力的未知数
* ∣3"2P∕+仇
而当构件组仅有低副时,则为;3/1 = 2P z
结论:基衣杆组卑满足静走条件
二?用图解法作机构的动态静力分析
步骤;
I)对机构进行运动分析,求出个构件的。及其质心的心;
2) 求出各构件的惯性力,并把它们视为外力加于构件上;
3)根据静定条件将机构分解为若干个构件组和平衡力作用
的构件:
4)对机构进行力分析,从有已知力的构件开始,对各构件组进行力分析:
5)对平衡力作用的构件作力分析。
[ft]如图所示为一往复式
运输机的机构运动简图。已
知各构件尺寸、G2、JS2、G5.
0、行。不计其他构件的重
量和惯性力。求各运动副反
力及需加于构件]±G点的平
衡力你(沿AX方
向)。
燥(1)
选比例尺A/、"八μa t作
机构运动简.速度图(图
b)、加速度图(图C)?
AaUD
(2) H定各构件的禎性力IMI 閔
构件2:
[片2=嗨=(G I 'g^P^2 _
∣Λ∕Z2=JC(X I =JS t gBlk=JSβ>W
山
F£I方2=%/刁2
(FH与“S2反向何2与逅反
向)
构件
5:
FG =叫如=(GM ∣S}μa pf
(F15-?ΛF反向)A d^
X
E
G2
(3)tt*A?l?V :
1)将各构件产生的惯性力视为
外力加于相应的构件上?
ES. S
2)分解轩组:4?5、2-3
此时可取滑块坊分离体,列方程
十E 十戸"十EM5 + F R65 =
θ
方向:√√ √√√
大小f √√ √? ?
3)进行力分析,
A先从构件组>4 开
始,由于不考虑构
件锚重量及惯性
力,故构件4为二
力杆,且有:
/<
A
t
占再分析杆组Z 3
枸件2: LAf C=O
F右2 = (G虫- 构
件3; F?-FΛ43Λ>O
杆组2、3;
∑?j=
θ
IS
方
向:
大小:?
按H作力多边形
由力多边形得?
恥3+用?s +忌43+用2+G +用12 +為产"
三、用解析法作机构的动态静力分析
1.矢量方程解析法
在图4 - 6中,设为刚体上A 点的作用 力,
半该力对刚体上任意点O 取矩时,则
(1) 首先建立一宜角坐标系,并将各
构件的杆矢量及方位角示出,如图 所示。燃后再设各运动副中的反力 为
(2)
首廉运动副;
机构中首解副的条件是:组成该运动S4的两个构件上的作用 外力
和力矩均为已知者?在本实例中,运动副「为应为首解副。
(3) 求 RC
取构件3为分离体.并取该构件上的诸力对D 点取矩(规定力矩的方向逆时针 者为正,顺时针者为负),则∑M D -O
^A = ^lI =
:
十
4Ly
KB = K l 2 =
;-K 21 =JιJ.2x j+K 12y j R c = R 23 = -Ryi≈ R2y 1t t + RDyj
RD = RX ≈
-克3 = R 嵌 Rj 4J
M Q ≈ r Psma
于是得 ?*^23 JMr= ∕3??
+
)- Mr
=一 Z3^23x iiι163 + l i R 2iy∞^0} -M r -O
同理,取构件2为分离体,并取诸力对B 点取矩,则"? = 0
? ^n+(αc ÷^)?P=-Z2??(R l U + ?√)÷(
L SRd s
i n
e2 " h^23y°°n
^2 一 OPain(? - ?) —6Pa ?(。2- ?)≡0
因此棘2?d Kny=
S
in(^-^)I
I 讐+讐[心2讥)十畑例-%)】 ! 勺 +
^s j ?
n
^3
[αsin(弘-%)十 bcos(-^P)I
⑶求RD
根据构件3上的诸力平衡条件ΣF≡0 R 43 = - R 23
⑷求RB
根据构件2上的诸力平衡条件^F=O
? R 12tR 32÷P^0
分别用;及;点积上式■可求得
RI2x =尺2?
一 P
CoS
^P , R IZy=R23y ■ P&11?
1
^12 ~ Rus , + RUjJ
⑸求RA
同理,根据构件1的平獲条件ΣP=C 得
Λ<ιfc Λu
Mb= f∣i
?Kj] -IIel t
*(RtUi + R21J)
至此,机构的受力分析进行完毕.
2矩阵法
如图为一四杆机构,图中1、2、3 分
别为作用于质心S八$2、:处的已知外力
(含惯性力),M八M2. M i为作用于各构件
上的已知外力偶觅(含惯性力偶矩),另
外,在从动件上还受着一个已知的生产阻
力矩气?现律确定各运动副中的反力及需
加于原动件1上的平Ifi力偶矩
如图所示先建立一直角坐标系,以便
将各力都分解为沿两坐标轴的两个分
力,然后再分别就构件1、ZR芳《山
它们的力的平篌方程式。
又为便于列矩阵方程,
D可解性分析:在四杆机构中,共有四个低副,每个低副中的反力都有两个去知要盍(即反力的大小及方向),此外,旳8N尚有一个力的未知要素, 所以在此机构中共有九个未知要素待定;而另一方面,在此机构中,对三个活动构件共可列出九个平衡方程,故此机构中所有的力的未知要素都是可解的。
2)反力的统一表示:用运动副中反力他,表示构件(作用于构件/上的反力,而Ri 所以各运动副中的反力统一写成坷的形式(即反力坷用%y表示之)。
3)力矩的统一表达式:作用于构件上任一点/ 上的力什对该构件上另一点K之矩(规定逆时针方向时为正,顺时针方向时为负),可表示
为下列统一的形式
MK = (JTC 一?∏)Ph + g 一?rκ)
Λ
式中>\—力作用点/的坐标,
?5J K—取矩点K的坐标。
4) 各构件的力平衡方程式
?对于构件I 分别根据∑M A -0 ΣF X -Q XF y -O 可得
■■ J ?]R% -(S 一 J r A)Rl2, + Mb = -(% - 畑)P“ - (ASl 一 ?r A)p iy ? MI -RUl-K nX = _F ?
_ R H F -R I2y = _P ?
?对于构件2有
"<3F B ? yc)^23χ- (JC ? ^β>K 23y = -(y β-ys2)^2X -(XS Xs)p2y M 2 心2*? Rd= - “2*
R 】2y _ Rjy = _ ^2y
?对于构件3有
一(WyD )R 珈一(5 一工 C )R “ = -(W 如)Pι?-(氐 3一工「疗刘 一 M"
^w y -^M y = _卩3,
以上共列出九个方程式,故可解出上述各运动副反力和平衡力的九个力 的未知要素。又因为以上九式为一线性方程组,因此可按构件1、2. 3上待 定的未知力IMA R 4IV RW R l2V RW RR
>ΛV Rz R 坤的次序整理成以下的 矩阵形式:
f ? 0
-Jr A e
-S :
1也
494 J 0 -1
0 -1 0 0
-1
0 ■ 1
J^l ?y
0 0 *
"??c
构牛】
I 0 ■1 O : ^iiy
9
1
O ?1 ! Λ
2>M
O yι>- - T u
R 级
构件3
X ■ 1
0 -1 () Rj
■ ?
0 1 0
1 J
FXV
「_[
N
M I
1
O -J O
O
Pl. OO-I
n f
-I W 刘 ^J-XsX
M 2
O -1 O
P2
、
O
O
-1
Pz>
—1 /W" Λ. 女
M 冊
Vf 厂 Vf r
O -1 U
FX
L
O
O
-1
PW
上式可以简化为[C]{ ^}=[D]{ P]
式中{,}—己知力的列阵;{R}——未知力的列阵;
?D]—已知力的系数矩阵, [0]——未知力的系数矩
列阵?
对于各种具体机构,都不难按上述的步骤进行分析,即按顺序对机构的每一活动构件写出其力平衡方程式,然后整理成为一个线性方程,并写成矩阵方程式。利用上述形式的矩阵方程弍,可以同时求出各运动副中的反力和所需的平衡力,而不必按静定杆组逐一进行推算, 而且根据这种矩阵方程式便于利用标准程序且计算机解算。
§3-5考虑摩擦时机构的力分析ΛA 1)ItJtHi UA和崖18■半哲?并曹岀tβR; 2)H二力杆着手分根据杆件受竝或受≡Sg杆相对于另一杠件的转动方自,求停作用在该枸件上的二力方向; 3)对有巳知力作用的构件作力分析; 4)对要求的力所在构件作力分析。 掌握了对运动副屮的摩擦分析的方袪后,就不难在考虑有摩擦的条件下,对机构进行力的分析了,下面我们举两个例子加以说明。 例:图示为一四杆机构,构件 1为主动件,已知驱动力矩不 计构件的重量和惯性力。求各 运动副中的反力及作用在构件 3上的平衡力矩MX 坍:U?家构什2所旻的眄力尽2?尽2笛方位。 2)?取?4M秀分左体_其上作∕≡*: ^R21、FM 、、 由力平衡条件得:F FW产?F R2] 且有:MI = F R21Δ÷Γk2l= MJL 3)?和构伴2舟分亦体一其上柞用有: 尽2? ^?32 F R32="R∣2=F R2I 3丿.取构仲3为分克休一其 由力平衡条件得:?-?^RZ1/V3= F W L F R2? 例如图所示为一曲柄滑块机构,设各构件的尺寸(包括转动 副的 半径)已知,各运动副中的摩擦系数均为/;作用在滑 块上的水平阻力为0,试对该机构在图示位置时进行力分 析(设各构件的重力及惯性力均略而不计),并确定加于点 〃与曲柄/〃垂直的平衡力Pb 的大小。 解:1)根据已知条件作 出各 转动副处的摩據 圆(如图中虔线小圆 所示)。 2)取二力杆连杆3为研 究对象 ?:?构件3在〃、C 两运动副处分別受到“3及心J 的作用 =>/?和和心分别切于该两处的摩擦圆外,且g=~Rg 3) 根据心及心J 的方向,定出心 及備J 的方向。 4) 取滑块4为分髙体 滑块4在Q 、仏J 及A*三个力的作用下平衡 =>ρ+∕j 54+Λ14-0且二力应汇于一点卩 5〕取曲柄2为分离体 曲柄2在Ph 、心和力作用下平衡 =>"b+z ?+R∣2=o ∕?M (= -Λ43)^ 心(=?∕?=他3)、及平 復力Pb 的大小。 6)用图解法求出各运动副的反力匕“ Q §3-6平衡力的简易求法 ——茹可夫斯基杠杆法 K应用场金:只需要知道为了维持机械按给定规律运动时应加于机械上的平衡力,而不要求知道各运动副中的反力。 2、≡?Jkrt:根据达朗伯尔原理,当机构各 构件的惯性力视为外力加于相应的构件上后, 即可认为该机构处于平衡 状态。因此,由虚位孩嵐理可得: ∑(P i? dg? COSa Z)=O 两边都除以力,则得 X(^rfV Z cOSΛJ)=∑ΛΓZ = 0 即当机构 处于平的狀态时,其上作用的所有外力 lfi?JL??2和等于零。 由速度图可见: V i? COS a i = h i? μv ∑(^ ,?)=θ ★作用于机构上所有片力对沿廉动件 (0之遒向转5190。的追度多边形极点的矩之和为辛。——茹可夫斯基杠杆法 例,已知生产阻力求解所需平衡力矩。 解:将作岀机构的转向速度多边形(即 将机构原速度多边形整个转过9炉),并 将各力平移至其转向多边形的对应点 当机构上的其它外力均为巳知时,应用茹可夫斯基杠杆法便可很方便地将平衡力求出来。 此方法在求解过程中,相当于将机构的转向速度多边形视为刚性杠杆,而各力对其极点取矩,所以称为UK 基本要求: >了解机构中作用的各种力及机构力分析的方法; >会确定各运动副中的反力及需加于机械上的平衡力或平衡力偶矩; >了解一般平面机构进行力分析的过程。 £点: ★作用在机械上的力及机构力分析的Q的和方廉; ★枸件慣性力的确夫J ★含念葺拯时运册別总反力钓确龙。 难点:君成唐都辅也帯期息反力的确炙。 连杆分析报告 连杆是连接活塞和曲轴,并将活塞所受作用力传给曲轴,将活塞的往复运动转变为曲轴的旋转运动的机构。由连杆体、连杆大头盖、连杆小头衬套、连杆大头轴瓦和连杆螺栓(或螺钉)等组成。连杆组承受活塞销传来的气体作用力及其本身摆动和活塞组往复惯性力的作用,这些力的大小和方向都是周期性变化的。因此连杆受到压缩、拉伸等交变载荷作用。连杆必须有足够的疲劳强度和结构刚度。 1.工作情况 连杆受力状况: 在最大惯性力引起的拉伸力工况:连杆大、小头孔内作用的拉伸载荷PY = 187.66 KN;连杆长螺钉预紧PC =182.92 KN;连杆短螺钉预紧力Pd = 178.59 KN;来自轴瓦的过盈配合力。 连杆材料属性: 2.根据图纸建模 3.导入ANSYS有限元 将模型导入ANSYS中,如下 4.创建轴瓦和曲柄销活塞销 在孔中创建轴瓦和曲柄销活塞销,如图。(假设过盈量为0.001m) 5.划分网格 对该模型进行网格划分。由于结构复杂,采用四面体单元。同时由于结构大小存在差异,网格的大小也不相同,以保证网格数量少。划分网格后如下: 6.创建接触单元 把接触的面创建接触单元,对于所有存在螺栓的区域,均使用绑定约束。由于轴瓦和曲柄销之间存在油膜,将其摩擦系数设为0.1,其余皆为0.3。接触单元如下: 7.约束和加载 对于连杆螺栓要施加预紧力。约束曲轴销的两个面。并在活塞销上施加力。在曲柄销上施加约束,在活塞销上施加力。力的加载是一个比较复杂的问题,但在实际情况中,活塞销往往不易变形。因此耦合其对应节点的所有自由度,如下: 并在编号最小的节点施加载荷。最终模型如下: 连杆受力分析 问题描述: 如图1所示的几何模型,连杆的厚度为0.5mm。在小头孔的内侧90°范围内承受P=l E 1.定义工作文件名和工作标题 (1)定义工作文件名:执行Utility Menu>File>Change Jobname命令,在弹出的【ChangeJobname】对话框中输入“c-rod”,选择【New log and error files】复选框,单击 按钮。 (2)定义工作标题:执行Utility Menu>File>Change Title命令,在弹出的【Change Title】对话框中输入“The stress calculating of c-rod”,单击按钮。 (3)重新显示:执行Utility Menu>Plot>Replot命令。 2.定义单元类型及材料属性 (1)设置单元类型:执行Main Menu>Preprocessro>Element Type>Add/Edit/Delete命令,弹出【Element Tpyes】对话框。单击按钮,弹出【Labrary of Element Types】对话框。选择“Not Solved”和“Mesh Facet 200”选项,单击按钮。 (2)设置单元选项:单击Element Types对话框中的按钮,弹出如图2所示的【MESH200 Element Type Option】对话框。设置“K1”为“QUAD 8-Node”,单击按钮。单击按钮,弹出【Library Of Element Type】对话框。选择“Structural Solid”和“Brick 20node 95”选项,单击按钮,单击按钮。 平面连杆机构的运动分析和动力分析1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm 最短杆长度+最长杆长度(125.36+73.4) ≤其余两杆长度之和(103.4+103.52) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm 最短杆长度+最长杆长度(125.36+50.1) ≤其余两杆长度之和(109.8+72.85) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第三组(3代)四杆机构L1=163.2mm,L2=61.6mm,L3=150mm,L4=90mm 最短杆长度+最长杆长度(163.2+61.6) ≤其余两杆长度之和(150+90) 最短杆为连架杆,四杆机构为曲柄摇杆机构 在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。 1.3 机构的数学模型的建立 图1机构结构简图 在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。如图1所示,先建立一直角坐标系。设各构件的长度分别为L1 、L2 、L3 、L4 , 其方位角为、、、。以各杆矢量组成一个封闭矢量多边形,即ABCDA。其个矢量之和必等于零。即: 结构杆件的受力变形 高二(10)班黄钦仪魏萌 指导教师邹樑 摘要 这篇论文通过实验,向我们展示了结构杆件在刚性连接下的受力变形特点以及杆系的不同部位受力对其他部位的影响,并提出了在建筑构筑物时选材的几点建议,为我们设计杆件提供最基本的资料。 研究目的 研究杆件的变形有以下三个目的: 1、使我们了解设计杆件时,除了要满足强度条件以保证安全外,还要满足其刚度条件以保证其正常工作。也就是要求杆件在荷载作用下,弯曲变形不得超过允许范围。 2、是将来我们学习杆件的变形计算的基础。 3、通过实验的分析和对资料的整理,提高了我们分析问题和解决问题的能力。 问题提出 在工程实际中,承受荷载和传递荷载的结构的构件在荷载的作用下,引起周围构件对它们的反作用,同时,构件本身因受内力作用而将产生变形,并且存在发生破坏的可能性。 构件在怎样的受力情况下会产生怎样的变形,构件在受力变形下会不会影响构筑物的正常使用,以及柱子等细长杆件受压时会不会出现屈曲现象致使杆件不能承担荷载,并由此引起整个构筑物的倒坍等都是我们将研究的问题。 研究方法:1收集资料2实验观察3画图分析4访问专业人士 材料:橡胶(型号:HD2803)、胶水 研究结果:在设计房屋、桥梁的楼面时,板和梁是用得最多的结构形式,在横向荷载的作用下,梁将产生弯曲变形,用橡胶做成梁的模型,这种弯曲变形就看得很清楚。 在加载之前,先在杆件的侧面上,划上许多横向直线和纵向直线,然后加载。 1、首先,我们做了一个最简单的杆件受力变形实验。 在一根杆件的两端支两个支点,再在这根杆件上加载(如图) 在加载的过程中可以观察到,杆件受载后弯曲了,但那些纵向直线仍保持直线形式,不过相对旋转了一个角度。 设想梁是由无数纵向纤维所组成,由于弯曲而使截面转动,就使梁凹边纤维缩短,凸边纤维伸长,于是中间必有一层纤维是没有长度改变 3.4 静定平面桁架 教学要求 掌握静定平面桁架结构的受力特点和结构特点,熟练掌握桁架结构的内力计算方法——结点法、截面法、联合法 3.4.1 桁架的特点和组成 静定平面桁架 桁架结构是指若干直杆在两端铰接组成的静定结构。这种结构形式在桥梁和房屋建筑中应用较为广泛,如南京长江大桥、钢木屋架等。 实际的桁架结构形式和各杆件之间的联结以及所用的材料是多种多样的,实际受力情况复杂,要对它们进行精确的分析是困难的。但根据对桁架的实际工作情况和对桁架进行结构实验的结果表明,由于大多数的常用桁架是由比较细长的杆件所组成,而且承受的荷载大多数都是通过其它杆件传到结点上,这就使得桁架结点的刚性对杆件内力的影响可以大大的减小,接近于铰的作用,结构中所有的杆件在荷载作用下,主要承受轴向力,而弯矩和剪力很小,可以忽略不计。因此,为了简化计算,在取桁架的计算简图时,作如下三个方面的假定: (1)桁架的结点都是光滑的铰结点。 (2)各杆的轴线都是直线并通过铰的中心。 (3)荷载和支座反力都作用在铰结点上。 通常把符合上述假定条件的桁架称为理想桁架。 桁架的受力特点 桁架的杆件只在两端受力。因此,桁架中的所有杆件均为二力杆。在杆的截面上只有轴力。 桁架的分类 (1)简单桁架:由基础或一个基本铰接三角形开始,逐次增加二元体所组成的几何不变体。(图3-14a) (2)联合桁架:由几个简单桁架联合组成的几何不变的铰接体系。(图3-14b) (3)复杂桁架:不属于前两类的桁架。(图3-14c) 3.4.2 桁架内力计算的方法 桁架结构的内力计算方法主要为:结点法、截面法、联合法 结点法――适用于计算简单桁架。 截面法――适用于计算联合桁架、简单桁架中少数杆件的计算。 联合法――在解决一些复杂的桁架时,单独应用结点法或截面法往往不能够求解结构的内力,这时需要将这两种方法进行联合应用,从而进行解题。 解题的关键是从几何构造分析着手,利用结点单杆、截面单杆的特点,使问题可解。 在具体计算时,规定内力符号以杆件受拉为正,受压为负。结点隔离体上拉力的指向是离开结点,压力指向是指向结点。对于方向已知的内力应该按照实际方向画出,对于方向未知的内力,通常假设为拉力,如果计算结果为负值,则说明此内力为压力。 常见的以上几种情况可使计算简化: 1、不共线的两杆结点,当结点上无荷载作用时,两杆内力为零(图3-15a)。 F1=F2=0 2、由三杆构成的结点,当有两杆共线且结点上无荷载作用时(图3-15b),则不共线的第三杆内力必为零,共线的两杆内力相等,符号相同。 F1=F2 F3=0 3、由四根杆件构成的“K”型结点,其中两杆共线,另两杆在此直线的同侧且夹角相同(图3-15c),当结点上无荷载作用时,则不共线的两杆内力相等,符号相反。 1.连杆受力及其特征: 1.)四冲程内燃机连杆在整个工作循环中时而受压,时而受拉,二冲程内燃机的连杆 则几乎是一直受压; 2.)连杆的摆动使杆身产生惯性力矩并使连杆受弯; 3.)主副连杆机构中的副连杆的作用力产生附加弯矩 2.设计连杆时注意: 1.)应从疲劳强度的角度来考虑连杆的强度设计,几乎所有连杆因强度问题而出现的 事故均系耐疲劳强度下不足所致; 2.)应保证连杆有足够的刚度,特别应避免连杆大、小端孔的变形过大,以保证轴瓦 与衬套能可靠工作,同时应力求减小给连杆螺栓增加附加弯曲应力; 3.)保证连杆大、小端轴瓦和衬套可靠工作、足够的耐磨性和抗疲劳性,以适应柴油 机不断提高功率和降低维护保养费用,延长检修期的需要。 3.平切口连杆大端: 连杆大端盖的剖分面与连杆中心垂直。杆身与大端盖之间用连杆螺栓联接。平切口结构连杆大端的曲柄销尺寸范围为dp≤(0.65-0.72)D。尽管这种大端结构及制造工艺均甚为简单,且仍广泛应用于高、中速内燃机中,但由于曲柄销径的增大受到限制,这种结构难以用于高参数的柴油机中。 4.斜切口连杆大端: 当连杆的接合面宽度K相同时,斜切口式连杆大端可以按排较大的连杆轴颈,而仍能保持由气缸中抽出活塞连杆组的优点。通常斜切口连杆大端许可安排下的连杆轴颈为dp≤0.85D. 5.连杆大端盖: 1.)梳齿形断面:结构轻,刚度较均匀,但加工困难、成本高,只能用于轻型高速柴 油机; 2.)双筋式:刚度亦较均匀,由于大端盖筋的方向与杆身上工字形断面肋片方向垂直 而不便与连杆体用同一幅锻模制造; 3.)T型断面:结构简单,易于锻造和机械加工,在中、高速柴油机中应有较多; 4.)工字形断面:结构合理,适合于铸钢毛坯,多用于中低速柴油机 6.连杆小端结构的优缺点: 1.)锻造毛坯的连杆,表面有7-10度的拔模角,通常在模锻之后外表不再机械加工, 广泛用于强载度不高,大批量生产的,尺寸不大的产品中; 2.)自由锻毛坯经车削加工而成,小端呈球形,杆身多呈圆柱形,工艺简单,结构笨 重,适用于小批量生产的中低速柴油机; 3.)在于增加小端顶部中央截面的抗弯能力; 4.)可以分别增加连杆小端及活塞销座的主要承压面,许多强载度较高的柴油机连杆 采用; 5.)二冲程高速柴油机的连杆小端,其特点在于衬套内表面有螺旋形布油槽,能向连 杆小端轴承内表面供应较充分的润滑油。 7.连杆杆身设计时为什么选用工字梁: 第19卷第5期昌潍师专学报 2000年10月Vol.19 No.5Journal of Changwei Teachers College Oct.2000 曲柄连杆机构的惯性力分析 Ξ 丁素英 (潍坊高等专科学校,山东潍坊 261041) 摘 要:曲柄连杆机构是活塞式制冷压缩机中的主要运动部件,它的受力情况直接影响压缩机的寿命.本文从质 点动力学角度对曲柄连杆机构进行了惯性力的分析. 关键词:曲柄连杆机构;惯性力;旋转 中图分类号:O31113 文献标识码:A 文章编号:1008—4150(2000)05—0068—03 在活塞式制冷压缩机中,曲柄连杆机构的作用是将外界输入的功率传递给活塞组件.因此,曲柄连杆机构的惯性力也就来自三个方面,即活塞往复直线运动产生的惯性力;曲柄不平衡质量旋转产生的惯性力;连杆产生的惯性力.由于曲柄连杆机构的质量分布不均匀,对惯性力的分析就增加一定的困难.下面从质量转化的角度加以分析. 图1 1 曲柄连杆机构的运动方程 曲柄连杆机构如图1所示.图中点O 为曲柄的旋转中心,点B 为曲柄销中心,点A 为活塞销中心,点C 和点D 分别为活塞销在内、外止点的位置.OB 为曲柄,长度以r 表示,A B 为连杆,长度以L 表示.曲柄与汽缸轴线的夹角为α,连杆与汽缸轴线的夹角为β.从外止点算起,活塞向曲轴旋转中心的位移为正,曲轴顺时针旋转为正. 由图中的几何关系,可得出活塞的位移x 为: x =OD -OA =(L +r )-(r cos α+L cos β)由△EOB 和△EA B 可知,EB =L sin β=r sin α,令λ=r L ,则sin β=λsin α,cos β= 1-sin 2β= 1-λ2 sin 2α. 利用二项式定理展成无穷级数 cos β=1-x 2sin 2α2-x 4sin 4α8 -……在实际应用中,α很小,可略去λ4 sin 4α以上各项,即 cos β≈1-12 λ2sin 2 α 于是 x =(L + r )- r cos α+L 1-12 λ2sin 2α=r (1-cos α+ 12 λ2sin 2α)(米)(1) 将(1)式对时间求导可得活塞运动的速度 v =d x d t =d x d α?d αd t =r sin α+λ22sin2α? d α d t 上式中导数d αd t 是曲柄的瞬时角速度,一般情况下,角速度为一常数,即d α d t =ω. ? 86?Ξ收稿日期:2000—03—02 4 曲柄连杆机构的受力分析 4.1 曲柄连杆机构的组成 摩托车发动机的曲柄连杆机构由活塞、活塞环、活塞销、连杆、大小头轴承、曲轴等组成。 4.1.1 活塞组合 活塞组合由活塞、活塞环、活塞销、 活塞销挡圈等组成,见图4-1。它的功能 是: 1)承受气缸中可燃混合气燃烧产生的 压力,并将作用力通过活塞销传给连杆, 带动曲轴旋转。 2)活塞顶部与气缸盖组成燃烧室。 3)通过安装在其上的活塞环,保证气 缸的密封性。 4.1.1.1 四行程发动机活塞 四行程发动机活塞的顶面呈平面形,且对应于进、排气门之处加工有凹坑,以 避免在运动中与进、排气门相干涉,在顶面有“IN ”标记表示进气侧,保证活塞安装时的方向。 在活塞槽部通常设有两道气环、一道油环。在油环槽周围,设置有许多回油小孔,安装油环后,能刮去缸壁上多余的润滑油(见图4-2)。有些活塞在油环槽下再加工一个较浅的环形槽, 其上也加工回油小孔。四行程发动机活塞所 有环槽上都无需有定位销孔,原因是四行程 发动机的气缸上无气口,活塞环运动时不会 产生干涉现象。 为适应活塞在高温、高压、高速条件下 工作,活塞通常多采用质量轻、导热性好的 高铝合金来制造。有些活塞表面还进行镀锡 处理,以提高其磨合性。 4.1.1.2 活塞环 四行程活塞裙部较短,并无需做有缺口,因四行程发动机的进、排气道没有气缸盖上。 但有时为避免与曲轴相撞,并为增加裙部弹性及减小活塞质量,在受力不 大的沿销孔方向两侧,从底部各开一个浅而长的圆弧形缺口。 活塞环的功能是: 1)密封气缸与活塞间的间隙,防止漏气。 2)刮去气缸壁上多余的机油。 3)把活塞的热量传递给气缸体散发。 活塞环应具有良好的密封性,在高温、高压、和高速的工况下,具有良好的弹度、弹性和耐磨性;此外,并应有良好的磨合性与加工性。为适应这些要求,活塞环的材料多选用合金铸铁。 活塞环的自由状态是非圆形 的,且具有切口,以适应装入气缸 后恰好成为圆形,与气缸贴合。切 口的形式如图4-3所示,其中直切 口比搭接口的密封性差,但工艺性 好;斜切口介于两者之间。 活塞环按其用途不同,可分为 气环和油环两类。 (1)气环 气环的主要功能 是密封活塞与气缸之间的间隙,防 止燃气漏入曲轴箱,同时,气环将 活塞头部的大部分热量传递给气 缸壁,帮助活塞散热。摩托车发动机的气环断面有梯形环和矩形环 两种。 梯形环的优点是:不易胶结和卡死,并有较好密封效果。缺点是:内锥面的加工比较困难。一般在温度较高,润滑油容易形成积炭或胶状物时,第一环槽装用梯形环。 矩形环的优点是:工艺性和传热性都较好。但其磨合性及对气缸的适应性较差,抗积炭、抗胶结的能力也较差,不宜用作第一道环。 (2)油环 油环的主要功能是刮去气缸壁上多余的润滑油,使气缸壁上形成一层均匀的油膜,它主要用 在四行程发动机上。油环可分为普通 油环和组合油环两类。 1)普通油环:它的外圆柱面中 间,加工一个环槽,使得油环和气缸 的接触面积减小,从而增大接触比 压,加强刮油能力和密封性。环沿圆 周加工有许多回油槽和回油孔,以便 使油环从气缸壁上刮下的润滑油流入活 塞上的回油孔而进入曲轴箱,见图4-4。 第五章平面连杆机构动力分析 §5.1概述 一、机构力分析的目的 在机构运动过程中,其各个构件是受到各种力的作用的,故机构的运动过程也是机构传力和作功的过程,作用在机械上的力,不仅是影响机械的运动和动力性能的重要参数,而且也是决定相应构件尺寸及结构形状等的重要依据。所以不论是设计新的机械,还是为了合理地使用现有机械,都应当对机构进行力分析。 机构力分析的目的有两个: 1)确定运动副中的反力,亦即运动副两元素接触处的相互作用力。这些力的大小和变化规律,对于计算机构各零件的强度,决定运动副中的摩擦、磨损,确定机构的效率及其运转时所需的功率,都是极为重要而且必需的资料。 2)确定机构原动件按给定规律运动时需加于机械上的平衡力(或平衡力矩)。所谓平衡力(或平衡力矩)是指与作用在机械上的已知外力及按给定规律运动时与各构件的惯性力(惯性力矩)相平衡的未知外力(外力矩)。求得机械的平衡力(或平衡力矩),对于确定原动机的功率,或根据原动机的功率确定机械所能克服的最大工作或荷等是必不可少的。 二、机构力分析的方法 机构力分析有两类,一类适用于低速轻载机械,称之为机构的静力分析,即在不计惯性力所产生的动载荷而仅考虑静载荷的条件下,对机构进行的力分析;另一类适用于高速重载机构称之为机构的动力分析,即同时计及静载荷和惯性力(惯性力矩)所引起的动载荷,对机构进行的力分析。 在对机构进行动力分析时,常采用动态静力法,即根据达朗贝尔原理,假想地将惯性力加在产生该力的构件上,则在惯性力和该构件上所有其他外力作用下,该机构及其单个构件都可认为是处于平衡状态,因此可以用静力学的方法进行计算。这种分析计算方法称为机构的动态静力分析。 机构的力分析方法可分为图解法和解析法两种。图解法用于静力分析是清晰简便的,也有足够的精度。考虑到图解法只是应用理论力学中的力多边形和二力共线及三力汇交等一些平衡关系求解,读者自己可以解决此类问题,本书不予讨论。由于解析法求解精度高,容易求得约束反力与平衡力的变化规律,随着电子计算机的广泛应用而愈来愈受到重视。 三、作用在机械上的力 如前所述,机器能实现预期的机械运动并用来完成有用的机械功或转换机械能,所以在组成机器的各种机构的运动过程中,它们的各个构件上都受到力的作用。作用在构件上的力 连杆受力分析实例 1、问题描述 如图4-2所示为汽车连杆的几何模型,连杆的厚度为0.5m,在小头孔的内侧90°范围内承受P=1000N的面载荷作用,利用有限元分析该连杆的受力状态。 由于连杆的架构和载荷均对称,因此在分析时只要采用一半进行分析。采用由底向上的建模方式,有20节点的SOLID95单元划分网格并用PCG求解器求解。 3、操作步骤 (1)定义工作文件名和工作标题 ①定义工作文件名:执行Utility Menu > File > Change Jobname命令在对话框【Change Jobname】中输入“c-rod”并选择【New log and error files】复选框,单击OK按钮。 ②定义工作标题:Utility Menu > File > Change Title,在对话框【Change Title】中输入“The Stress calculating of c-rod”,单击OK按钮。 (2)定义单元类型及材料属性 ①设置单元类型:Main Menu > Preprocessor > Element Type >Add/Edit/Delete,在【Element Type】对话框中单击Add...按钮,在之后的【Labrary of Element Type】对话框中选择“Not Solved”和“Mesh Facet 200”选项,单击Ok按钮。 ②设置单元选项:单击【Element Type】对话框中的Options...按钮,在【MESH200 element type option】设置“K1”为“QUAD 8-Node”,单击OK按钮。单击Add...按钮,在【Labrary of Element Type】中选择“Structural Solid”和“Brick 20node95”选项,单击Ok按钮,单击Close按钮。 ③设置材料属性:Main Menu > Preprocessor > Material Props > Material Models,在【Define Material Models Behavior】窗口中双击【Material Model > Available】列表中的“Structural﹨Linear﹨Elastic﹨Isotropic”选项,在弹出【Linear Isotropic Material Properties For Material Number 1】对话框中输入“EX=30e6,PRXY=0.3”,单击OK按钮,执行Material > Exit命令,完成材料属性的设置。 (3)建立2D模型 ①创建两个圆环面:Main Menu > Preprocessor > Modeling > Create >Areas > Circle > By >Dimensions,在对话框【Circle Area by Dimensions】,输入数据“RAD1=1.4,RAD2=1,THETA1=0,THETA2=180”,单击Apply 按钮,在THETA1文本框中输入“45”,单击OK按钮。 ②打开编号控制:Utility Menu > PlotCtrls > Numbering,选中【Plot Numbering Controls】对话框中的【Areas Number】复选框,单击Ok按钮。(4)创建两个矩形面 ①生成矩形面:Main Menu > Preprocessor > modeling > Create > Areas >Rectangle > By Dimensions,在【Create Rectangle by Dimensions】连杆分析报告
连杆受力分析实例
四连杆机构分析代码动力学--精简
结构杆件的受力变形
桁架受力分析
连杆受力及其特征
曲柄连杆机构的惯性力分析
04 曲柄连杆机构的 受力分析
第五章平面连杆机构动力分析
连杆受力分析