AVR单片机串口的波特率设置

AVR单片机串口的波特率设置
公司有一款产品要实现通过串口更新开机画面的功能。产品用的是AVR的ATmega8单片机,配有两个通用同步和异步串行接收器和转发器(USART) 。在芯片的数据
文档里给出了波特率寄存器UBRR的值的计算公式。
可是实际测试才发现,就算出的值根本不能用。也
就是说,用算出的值发出的波特率根本不是想要的波特率。百思不得其解,只好上网搜搜看有没有收获。果然,网上有个仁兄的症状和我一样,也是波特率不对。看了
后面的回答,觉得有一个挺靠谱的,大概是说,在用了AVR的内部RC振荡器的情况下,实际波特率会和计算值
有偏差。因为芯片的内部RC振荡器频率不像外部晶振的频率那么稳定。
在不增加外部晶振的情况下,如何解决问题呢?在
网没有找到什么方法,只好自己用笨方法了。上示波器,看单片机发出的波形的宽度,和标准的波特率的宽度对比,再一点点的在UBRR的计算值的基础上修正,直到单片机发出的波形正确为止。
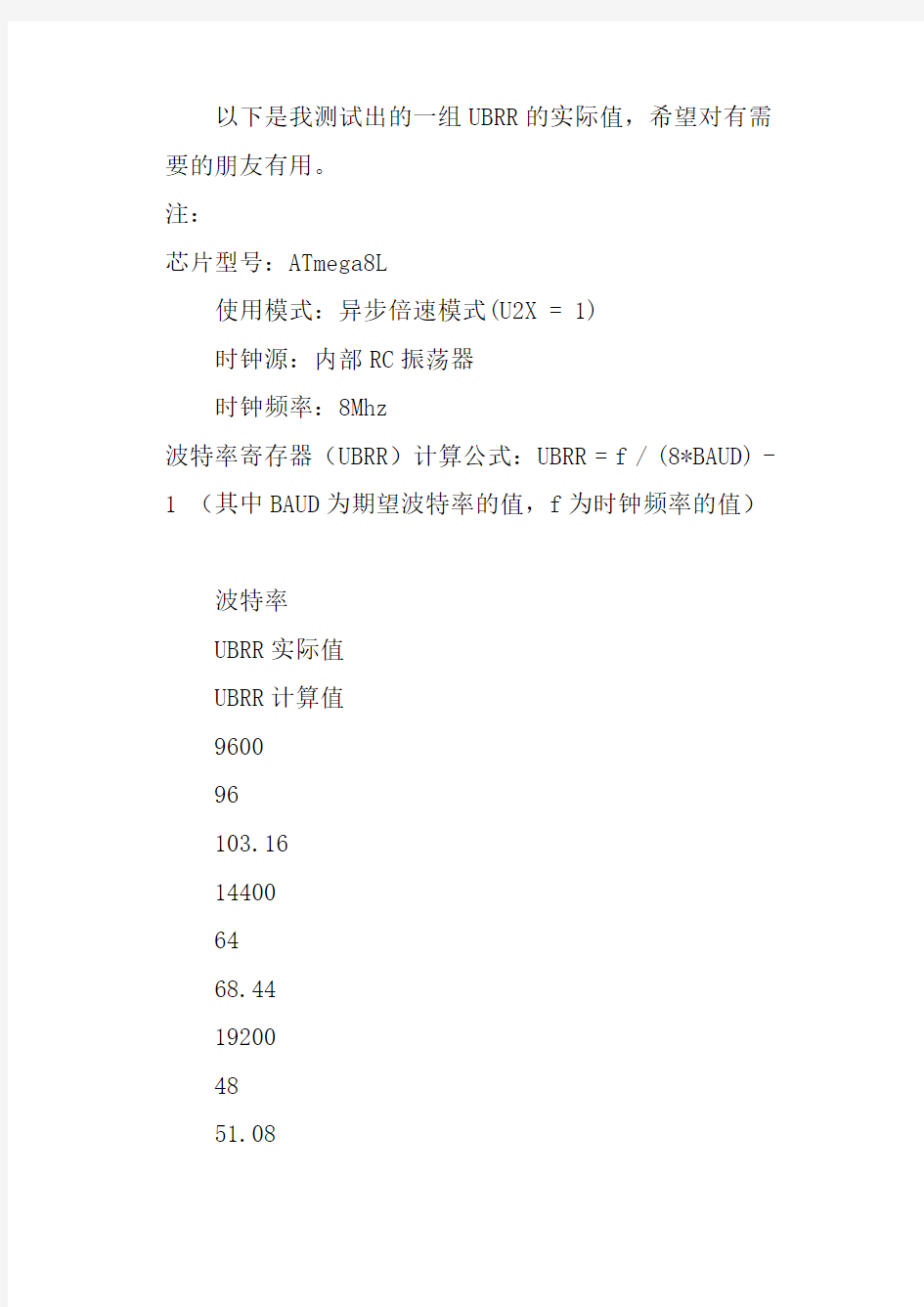
以下是我测试出的一组UBRR的实际值,希望对有需要的朋友有用。
注:
芯片型号:ATmega8L
使用模式:异步倍速模式(U2X = 1)
时钟源:内部RC振荡器
时钟频率:8Mhz
波特率寄存器(UBRR)计算公式:UBRR = f / (8*BAUD) - 1 (其中BAUD为期望波特率的值,f为时钟频率的值)
波特率
UBRR实际值
UBRR计算值
9600
96
103.16
14400
64
68.44
19200
48
51.08
28800 31
33.72 38400 22
25.04 56000
15
16.85 57600
15
16.36 115200
未测试
7.68 128000
未测试
6.81
根据C51单片机的键盘及LCD显示
基于C51单片机的键盘及LCD显示 一、实验目的 1.掌握矩阵式键盘的数字键和功能键的编程方法。 2.掌握LCD的接口技术和编程方法。 3.掌握仪器监控程序设计和调试方法。 二、预习与参考 1. 结合ST7920 控制器系列中文图形液晶模块有关资料手册,详细了解ST7920接口设计技术。 2. 参考资料 1)实验板说明书 2)ST7920 控制器系列中文图形液晶模块资料手册 三、设计指标 利用实验板上提供的键盘电路,LCD显示电路,设计一人机界面,能实现以下功能: 1.LCD上显示“重庆科技学院” 2.按键至少包括0-9的数字键 3.LCD显示按键值 4.电子钟显示:时,分,秒(选作) 四、实验要求 1.以单片机为核心,设计4*4非编码键盘及LCD的硬件电路,画出电路原理图。 2.设计4*4非编码键盘及LCD的控制软件,画出流程图,编写控制程序。
五、实验仪器设备和材料清单 单片机实验板、连接导线、ST7920图形液晶模块、PC机; Keil c51软件 六、实验设计及实施的指导 1.实验课前布置实验任务,提出实验要求,预习相关资料,完成硬件草图设计和软件流程图备查。 2.经指导教师检查,预习达到要求者进入实验室实验。 3.按照设计的电路连线,构建键盘及显示系统,经检查无误方可进入下一步。 4.在指导教师指导下调试LCD显示程序。 5.在指导教师指导下调试按键程序。 6.综合调试直到满足设计要求。 七、实验成绩评定方法 实验成绩包括预习、实验完成质量、实验报告质量4部分组成,各部分所占比例分别为30%、30%、40%。 八、实验报告要求 1.实验报告格式: 一.实验名称 二.实验目的 三.实验内容 四.设计思想 五.硬件设计 六.程序代码
51单片机串口通信及波特率设置
51单片机串口通信及波特率设置 MCS-51单片机具有一个全双工的串行通信接口,能同时进行发送和接收。它可以作为UART(通用异步接收和发送器)使用,也可以作为同步的移位寄存器使用。 1. 数据缓冲寄存器SBUF SBUF是可以直接寻址的专用寄存器。物理上,它对应着两个寄存器,即一个发送寄存器一个接收寄存器,CPU写SBUF就是修改发送寄存器;读SBUF就是读接收寄存器。接收器是双缓冲的,以避免在接收下一帧数据之前,CPU未能及时的响应接收器的中断,没有把上一帧的数据读走而产生两帧数据重叠的问题。对于发送器,为了保持最大的传输速率,一般不需要双缓冲,因为发送时CPU是主动的,不会产生重叠问题。 2. 状态控制寄存器SCON SCON是一个逐位定义的8位寄存器,用于控制串行通信的方式选择、接收和发送,指示串口的状态,SCON即可以字节寻址也可以位寻址,字节地址98H,地址位为98H~9FH。它的各个位定义如下: MSB LSB SM0 SM1 SM2 REN TB8 RB8 TI RI SM0和SM1是串口的工作方式选择位,2个选择位对应4种工作方式,如下表,其中Fosc是振荡器的频率。 SM0 SM1 工作方式功能波特率 0 0 0 8位同步移位寄存器Fosc/12 0 1 1 10位UART 可变 1 0 2 11位UART Fosc/64或Fosc/32 1 1 3 11位UART 可变 SM2在工作方式2和3中是多机通信的使能位。在工作方式0中,SM2必须为0。在工作方式1中,若SM2=1且没有接收到有效的停止位,则接收中断标志位RI不会被激活。在工作方式2和3中若SM2=1且接收到的第9位数据(RB8)为0,则接收中断标志RB8不会被激活,若接收到的第9位数据(RB8)为1,则RI置位。此功能可用于多处理机通信。 REN为允许串行接收位,由软件置位或清除。置位时允许串行接收,清除时禁止串行接收。 TB8是工作方式2和3要发送的第9位数据。在许多通信协议中该位是奇偶位,可以按需要由软件置位或清除。在多处理机通信中,该位用于表示是地址帧还是数据帧。 RB8是工作方式2和3中接收到的第9位数据(例如是奇偶位或者地址/数据标识位),在工作方式1中若SM2=0,则RB8是已接收的停止位。在工作方式0中RB8不使用。 TI 为发送中断标志位,由硬件置位,软件清除。工作方式0中在发送第8位末尾由硬件置位;在其他工作方式时,在发送停止位开始时由硬件置位。TI=1时,申请中断。CPU 响应中断后,发送下一帧数据。在任何工作方式中都必须由软件清除TI。 RI为接收中断标志位,由硬件置位,软件清除。工作方式0中在接收第8位末尾由硬件置位;在其他工作方式时,在接收停止位的中间由硬件置位。RI=1时,申请中断,要求CPU取走数据。但在工作方式1中,SM2=1且未接收到有效的停止位时,不会对RI置位。在任何工作方式中都必须由软件清除RI。 系统复位时,SCON的所有位都被清除。 控制寄存器PCON也是一个逐位定义的8位寄存器,目前仅仅有几位有定义,如下所示:MSB LSB
AVR单片机下载线
像我们这样搞电子的人,要的就是动手的乐趣。下面我们来介绍近期在网络上非常流行的USBasp下载线,因为现在的笔记本包括台式机都渐渐地舍弃了并口、串口;所以之前的并口或串口下载线已经不能再使用了,应该说是做个USBasp下载线是势在必行的,下面我们来介绍其制作的全过程。本 下载线与《51单片机C语言快速上手》完全同步,有兴趣的朋友可以从网上以关键字的形式搜索下载。 图(1) 图1为原作者设计的原理图,为了便于制作我修改过某部分电路如图2,其功能一样。
图(2) 在制作之前首先要搞清楚几点: 第一、这个USB下载线本身就是一块AVR单片机,在制作过程中也必需对其进行程序下载才能运行。 第二、先得大概了解一下这个AVR单机机ATmega8的基本资料。这样才能对电路有个了解,从而便于调试。 第三﹑COM1是PC机与USB相接的端口,我们在焊接时一定要区分GND、VCC、D+、D-,下面图(3)是对应本次制作的USB端口的引脚功能。在焊接的之前务必搞清楚,否则会造成PC机端口的USB或下载给的ATmega8烧毁。
图(3)USB端口引脚功能 第四﹑最后我们来了解一下电路的结构。对应图2,其中JP1是选择下载时的速度是快速或慢速,当JP1接地时选择低速,否则为高速。对于选择快速还是慢是相对于被下载的单片机晶振时钟而言的。一般来讲,目标单片机与USBasp的ATmega8的时钟不能相差太远。而JP2是电源的选择,当短接时被下载的单片机选择USBasp供电,则否选择独立供电。切记:两者只能任选其一。LED2为ATmega8程序运行的指示灯,当其点亮时就证明USBasp运行正常。LED1为下载程序时的工作指示灯,当接收到上位机信号时,此灯就会闪动。
基于51单片机的PS2键盘的单片机编程
PS2键盘的单片机编程 在单片机系统中,经常使用的键盘都是专用键盘.此类键盘为单独设计制作的,成本高、使用硬件连接线多,且可靠性不高,这一状况在那些要求键盘按键较多的应用系统中更为突出.与此相比,在PC系统中广泛使用PS/2键盘具有价格低、通用可靠,且使用连接线少(仅使用2根信号线)的特点,并可满足多种系统的要求.因此在单片机系统中应用PS/2键盘是一种很好的选择. 文中在介绍PS/2协议和PS/2键盘工作原理与特点的基础上,给出了一个在单片机上实现对PS/2键盘支持的硬件连接与驱动程序设计实现.该设计实现了在单 片机系统中对PS/2标准104键盘按键输入的支持.使用Keil C51开发的驱动程序接口和库函数可以方便地移植到其他单片机或嵌入式系统中.所有程序在 Keil uVision2上编译通过,在单片机AT89C51上测试通过. 1 PS/2协议 目前,PC机广泛采用的PS/2接口为mini-DIN 6pin的连接器,如图1所示. PS/2设备有主从之分,主设备采用Female插座,从设备采用Male插头.现在广泛使用的PS/2键盘鼠标均在从设备方式下工作.PS/2接口的时钟 与数据线都是集电极开路结构,必须外接上拉电阻(一般上拉电阻设置在主设备中).主从设备之间数据通信采用双向同步串行方式传输,时钟信号由从设备产生. 1.1 从设备到主设备的通信 当从设备向主设备发送数据时,首先检查时钟线,以确认时钟线是否为高电平.如果是高电平,从设备就可以开始传输数据;反之,从设备要等待获得总线的控制权,才能开始传输数据.传输的每一帧由11位组成,发送时序及每一位的含义如图2 所示. 每一帧数据中开始位总是为0,数据校验采用奇校验方式,停止位始终为1.从设 备到主设备通信时,从设备总是在时钟线为高时改变数据线状态,主设备在时钟 下降沿读人数据线状态.
51单片机课设 串口计算器
[二0一三年]
1作品简介 本作品为带有串口通信功能的计算器,PC可通过串口助手软件将算式发送至单片机,单片机立即将计算结果发送回PC,并且在液晶上显示结果。串口通信波特率为两档可调,分别为9600bps和4800bps,可通过两个按键调整,同时在液晶上会显示当前的波特率。 计算器可自动识别输入的字符串,并自动判断输入的算式是否正确;可自动识别算式中包含错误字符、除数为零、浮点数做取余运算等错误。当计算结果超出设定范围时在液晶上出现“超出范围”提示,同时向PC发送“The result is out of range! ”。 2作品整体方案 2.1 串行通信功能: 实验板和PC电脑通过USB线相连,使MCU和PC软件“串口助手”能够进行串行通信。 (1)当实验板上电时默认波特率为9600bps,并发送欢迎词和提示词,例如“Welcome to Calculator V1.0”,"You can press key1 and key2 to change baud rate.".... (2)当实验板上按键1按下时波特率变更为4800bps,按键2按下时波特率变更为9600bps,并用两个LED灯指示相应的波特率。 2.2 计算器功能 通过串口助手发送框发送需要计算的公式,例如20*4=,MCU收到后解析公式并计算结果,将结果返回给串口,例如“The result is 80”,同时将计算结果显示在数码管上,具体细节如下: (1)可以进行加(+)、减(-)、乘(*)、除(\)、取余(%)运算; (2)整形、浮点型运算; (3)当计算结果为整形数时,有效的运算结果范围是-999~9999,超过此结果,返回相应的提示符,例如“The result is out of range.”,液晶上显示“超出范围”; (4)当计算结果为浮点数时,有效的运算结果范围是-99.9~999.9,液晶上保
AVR单片机程序
* 文件名:闪烁灯.c * 杜邦线接法:用单条杜邦线把PD.0和J38的1端相连接。 ***********************************************************************/ #include
* 文件名:闪烁灯2.c * 创建人:东流,2012年2月10日 * 版本号:1.0 * 杜邦线接法:用8针杜邦线把PD和J38的1--8连接(PD0对应J38的1端)。 用杜邦线把PB0对应J38的9端。 用杜邦线把PB1对应J38的10端。 用杜邦线把PB2对应J38的11端。 用杜邦线把PB3对应J38的12端。 ***********************************************************************/ #include
MSP430串口波特率的设置与计算
MSP430波特率的计算 给定一个BRCLK时钟源,波特率用来决定需要分频的因子N: N = fBRCLK/Baudrate 分频因子N通常是非整数值,因此至少一个分频器和一个调制阶段用来尽可能的接近N。 如果N等于或大于16,可以设置UCOS16选择oversampling baud Rate模式注:Round():指四舍五入。 Low-Frequency Baud Rate Mode Setting 在low-frequency mode,整数部分的因子可以由预分频实现: UCBRx = INT(N) 小数部分的因子可以用下列标称公式通过调制器实现: UCBRSx = round( ( N –INT(N) ) × 8 ) 增加或减少UCBRSx一个计数设置,对于任何给定的位可能得到一个较低的最高比特误码率。如果确定是这样的情况UCBRSx设置的每一位必须执行一个精确的错误计算。 例1:1048576Hz频率下驱动以115200波特率异步通讯 ACLK = REFO = ~32768Hz, MCLK = SMCLK = default DCO = 32 x ACLK = 1048576Hz。 N = fBRCLK/Baudrate = 1048576/115200 = ~9.10 UCBRx = INT(N) = INT(9.10) = 9 UCBRSx = round( ( N –INT(N) )×8 ) = round( ( 9.10 –9) × 8 )=round(0.8 )=1 UCA0CTL1 |= UCSSEL_2;// 选SMCLK为时钟 UCAxBR0 = 9; UCAxBR1 = 0; UCAxMCTL = 0x02;//7-4:UCBRFx,3-1:UCBRSx,0:UCOS16 UCBRSx 为寄存器UCAxMCTL的1-3位,所以写入0x02(00000010) 例2:32768Hz频率下驱动以2400波特率异步通ACLK = REFO = ~32768Hz, MCLK = SMCLK = DCO ~1.045MHz N = fBRCLK/Baudrate = 32768/2400 = ~13.65 UCBRx = INT(N) = INT(13.65) = 13 UCBRSx = round( ( N –INT(N) )×8 ) = round( ( 13.65 –13) × 8 )=round(5.2)=5 UCA0CTL1 |= UCSSEL_1; // 选ACLK为时钟 UCAxBR0 = 13;UCAxBR1 = 0 ; UCAxMCTL = 0x0A;//7-4:UCBRFx,3-1:UCBRSx,0:UCOS16 UCBRSx为寄存器UCAxMCTL的1-3位,所以写入0x0A(00001010) Oversampling Baud Rate Mode Setting 在oversampling mode 与分频器设置如下:
51单片机独立按键程序查询法和外部中断两种
//以下程序都是在VC++6.0 上调试运行过的程序,没有错误,没有警告。 //单片机是STC89C52RC,但是在所有的51 52单片机上都是通用的。51只是一个学习的基础平台,你懂得。 //程序在关键的位置添加了注释。 //用//11111111111111111代表第一个程序。//2222222222222222222222222代表第二个程序,以此类推 //1111111111111111111111111111111111111111111111111111111111111111111 //1111111111111111111111111111111111111111111111111111111111111111111 /****************************************************************************** * * 实验名: 左右流水灯实验 * 使用的IO : LED使用P2,键盘使用P3.1 * 实验效果: 按下K1键, * 注意: ******************************************************************************* / #include
个人总结的AVR的ATMEGA16L单片机程序
ATMAGE 16 的C语言程序
ATMAGE 16 的C语言程序 (1) 一、PB0 口的PB0.1 LED 发光管闪烁的程序: (3) 二、PA0、PB0、PC0口的LED 发光管闪烁的程序: (5) 三、I/O口的输入与输出 (6) 四、跑马灯 (8) 五、数码管计数显示设计 (10) 六、控制直流电机正反转 (16) 七、单片机的定时器(T/C0)应用 (20) AVR原理图 (24)
一、PB0 口的PB0.1 LED 发光管闪烁的程序: #include
else PORTB&=0XFE; /*&最后一位为0 */ led=!led; //延时 for (i=0; i<255; i++) for(j=0; j<255;j++) k++; } } /////////////////////////////////////////////////////////////// #include
单片机波特率的计算方法
51单片机波特率计算的公式和方法 51单片机芯片的串口可以工作在几个不同的工作模式下,其工作模式的设置就是使用SCON寄存器。它的各个位的具体定义如下: SM0SM1SM2REN TB8RB8TI RI SM0、SM1为串行口工作模式设置位,这样两位可以对应进行四种模式的设置。串行口工作模式设置。 波特率在使用串口做通讯时,一个很重要的参数就是波特率,只有上下位机的波特率一样时才可以进行正常通讯。波特率是指串行端口每秒内可以传输的波特位数。这里所指的波特率,如标准9600不是每秒种可以传送9600个字节,而是指每秒可以传送9600个二进位,而一个字节要8个二进位,如用串口模式1来传输那么加上起始位和停止位,每个数据字节就要占用10个二进位,9600波特率用模式1传输时,每秒传输的字节数是9600÷10=960字节。 51芯片的串口工作模式0的波特率是固定的,为fosc/12,以一个12M的晶振来计算,那么它的波特率可以达到1M。模式2的波特率是固定在fosc/64或fosc/32,具体用那一种就取决于PCON寄存器中的SMOD位,如SMOD为0,波特率为focs/64,SMOD为1,波特率为focs/32。 模式1和模式3的波特率是可变的,取决于定时器1或2(52芯片)的溢出速率,就是说定时器1每溢出一次,串口发送一次数据。那么我们怎么去计算这两个模式的波特率设置时相关的寄存器的值呢?可以用以下的公式去计算。
上式中如设置了PCON寄存器中的SMOD位为1时就可以把波特率提升2倍。通常会使用定时器1工作在定时器工作模式2下,这时定时值中的TL1做为计数,TH1做为自动重装值,这个定时模式下,定时器溢出后,TH1的值会自动装载到TL1,再次开始计数,这样可以不用软件去干预,使得定时更准确。在这个定时模式2下定时器1溢出速率的计算公式如下: 溢出速率=(计数速率)/(256-TH1初值) 溢出速率=fosc/[12*(256-TH1初值)] 上式中的“计数速率”与所使用的晶体振荡器频率有关,在51芯片中定时器启动后会在每一个机器周期使定时寄存器TH的值增加一,一个机器周期等于十二个振荡周期,所以可以得知51芯片的计数速率为晶体振荡器频率的1/12,一个12M的晶振用在51芯片上,那么51的计数速率就为1M。通常用11.0592M 晶体是为了得到标准的无误差的波特率,那么为何呢?计算一下就知道了。如我们要得到9600的波特率,晶振为11.0592M和12M,定时器1为模式2,SMOD 设为1,分别看看那所要求的TH1为何值。代入公式: 11.0592M 9600=(2÷32)×((11.0592M/12)/(256-TH1)) TH1=250
51单片机键盘设置
\\\§8.3 键盘接口技术 一、键盘输入应解决的问题 键盘是一组按键的集合,它是最常用的单片机输入设备. 操作人员可以通过键盘输入数据或命令,实现简单的人机通讯。 键是一种常开型按钮开关,平时(常态)键的二个触点处于断开状态,按下键时它们才闭合(短路)。 键盘分编码键盘和非编码键盘。 键盘上闭合键的识别由专用的硬件译码器实现并产生编号或键值的称为编码键盘, 如:ASCⅡ码键盘、BCD码键盘等; 靠软件识别的称为非编码键盘。 在单片机组成的测控系统及智能化仪器中用得最多的是非编码键盘。 本节着重讨论非编码键盘的原理、接口技术和程序设计。 键盘中每个按键都是—个常开关电路,如图所示。
1.按键的确认:P1.7=1 无按键; P1.7=0 有按键; 2.去抖动 去抖动的方法: ①硬件去抖动采用RS触发器: 优点: 速度快,实时, 缺点: 增加了硬件成本 ②软件去抖动采用延时方法 延时5—10ms 延时5—10ms P1.7=0 确认P1.7=0 P1.7=1 (去前沿抖动) (去后沿抖动) 二、独立式键盘
每个I/O口连接一个按,S1 P1.0 S2 P1.1 ………………………. S8 P1.7 软件: START:MOV P1,#0FFH ;置P1口为高电平 JNB P1.0, RS1 ; S1按下,程序去执行RS1 JNB P1.1, RS2 ; S2按下,程序去执行RS2
JNB P1.2, RS3 ; S3按下,程序去执行RS3 JNB P1.3, RS4 ; S4按下,程序去执行RS4 JNB P1.4, RS5 ; S5按下,程序去执行RS5 JNB P1.5, RS6 ; S6按下,程序去执行RS6 JNB P1.6, RS7 ; S7按下,程序去执行RS7 JNB P1.7, RS8 ; S8按下,程序去执行RS8 AJMP START ; 继续扫描按键 …………. RS1: AJMP PK1 ; RS2: AJMP PK2 ; RS3: AJMP PK3 ; RS4: AJMP PK4 ; RS5: AJMP PK5 ; RS6: AJMP PK6 ; RS7: AJMP PK7 ; RS8: AJMP PK8 ; AJMP START ; 无键按下,继续扫描………………… PK1: ……….. ;按键S1功能处理程序 AJMP START ;处理S1按键后, 继续扫描PK2: ……….. ;按键S2功能处理程序
MCS-51单片机串行口工作方式与波特率计算举例
MCS-51单片机串行口工作方式与波特率计算举例 1)方式0 方式0是外接串行移位寄存器方式。工作时,数据从RXD串行地输入/输出,TXD 输出移位脉冲,使外部的移位寄存器移位。波特率固定为fosc/12(即,TXD每机器周期输出一个同位脉冲时,RXD接收或发送一位数据)。每当发送或接收完一个字节,硬件置TI=1或RI=1,申请中断,但必须用软件清除中断标志。 实际应用在串行I/O口与并行I/O口之间的转换。 2)方式1 方式1是点对点的通信方式。8位异步串行通信口,TXD为发送端,RXD为 接收端。一帧为10位,1位起始位、8位数据位(先低后高)、1位停止位。波特率由T1或T2的溢出率确定。 在发送或接收到一帧数据后,硬件置TI=1或RI=1,向CPU申请中断;但必须用软件清除中断标志,否则,下一帧数据无法发送或接收。 (1)发送:CPU执行一条写SBUF指令,启动了串行口发送,同时将1写入 输出移位寄存器的第9位。发送起始位后,在每个移位脉冲的作用下,输出移位寄存器右移一位,左边移入0,在数据最高位移到输出位时,原写入的第9位1的左边全是0,检测电路检测到这一条件后,使控制电路作最后一次移位,/SEND 和DATA无效,发送停止位,一帧结束,置TI=1。 (2)接收:REN=1后,允许接收。接收器以所选波特率的16倍速率采样RXD 端电平,当检测到一个负跳变时,启动接收器,同时把1FFH写入输入移位寄存器(9位)。由于接、发双方时钟频率有少许误差,为此接收控制器把一位传送时间16等分采样RXD,以其中7、8、9三次采样中至少2次相同的值为接收值。接收位从移位寄存器右边进入,1左移出,当最左边是起始位0时,说明已接收8位数据,再作最后一次移位,接收停止位。此后: A、若RI=0、SM2=0,则8位数据装入SBUF,停止位入RB8,置RI=1。
avr单片机全系列选型指南
AVR Microcontrollers ATMEL? CORPORATION A VR? Microcontrollers: Product Line Reference January 2006 Customer Edition Table of Contents 1AVR Product Family (2) 1.1P RODUCT S ELECTION G UIDE - TINY AVR? (2) 1.2P RODUCT S ELECTION G UIDE - MEGA AVR? (3) 1.3P RODUCT S ELECTION G UIDE – PICO P OWER?AVR (4) 1.4P RODUCT S ELECTION G UIDE –AVR32 (4) 1.5P RODUCT S ELECTION G UIDE – MEGA AVR LCD AND ASSP AVR (5) 1.6P RODUCT S ELECTION G UIDE –AVR Z-L INK? (5) 1.7P RODUCT S ELECTION G UIDE –A UTOMOTIVE AVR (6) 2Application Area in Focus: Comparing power consumption (7) 2.1.1AVR BOD vs. TI BOR (7) 2.1.2Protection in sleep modes (8) 2.2O VERALL POWER CONSUMPTION (8) 3AVR Development Tools (9) 3.1T OOLS R EFERENCE (9) 3.2AVR S TUDIO?T OOLS AND D EVICE S UPPORT (10) 4Documentation (12) 4.1D ATASHEETS (12) 4.2A PPLICATION N OTES (13)
基于某51单片机地键盘盘可调万年历
开放性实验报告 题目: 基于80C51的万年历设计_ 院系:
专业班级: 学号: 姓名: 指导老师:________________________ 时间:2014年9月8号 摘要 电子万年历是一种非常广泛日常计时工具,对现代社会越来越流行。它可以对年、月、日、周、时、分、秒进行计时,还具有闰年补偿等多种功能。本系统选用DALLAS 公司生产的日历时钟芯片DS1302来作为实时时数字万年历采用直观数字显示,可以同时显示年、月、日、周、时、分、秒等信息,还具有键盘时间校准等功能。该电路采用AT89C52单片机作为核心,用以5V电压供电。 本系统硬件部分由AT89C52单片机、DS1302时钟芯片、LCD1602液晶显示环境下以C51语言编写,包括时间设置、时间显示、时间修正等功能。在仿真的时候,以Proteus 与Keil uVision4软件为基础,编写了MCS-51单片机对LCD1602显示控制的软件,绘制其原理图,并使用Proteus软件与Keil uVision4软件建立联合仿真。本设计主要论述了原理图各个模块的作用,以及控制软件的各个模块的编程。
关键词:时钟芯片DS1302;单片机AT89C52;液晶显示1602;独立键盘等
目录 第1章绪论 (1) 1.1实时万年历的简介 (1) 1.2系统所实现的功能 (3) 第2章开发工具软件简介 (4) 2.1K EIL U V ISION4软件简介 (4) 2.2P ROTEUS软件简介 (4)
2.3K EIL U V ISION4与P ROTEUS软件联合仿真 (5) 第3章LCD1602显示控制技术 (6) 3.11602字符型LCD简介 (6) 3.2LCD1602功能 (7) 3.3 LCD1602的指令说明及时序 (8) 3.4LCD1602的RAM地址映射及标准字库表 (7) 3.5 LCD1602的一般初始化(复位)过程 (8) 第4章系统硬件概况 (13) 4.1系统概况 (13) 4.2 MCS-51单片机最小系统模块 (14) 4.3 DS1302时钟芯片控制与键盘设置时间模块 (15) 4.4 LCD1602显示模块 (16) 第5章软件控制系统概况 (18) 5.1程序流程概况 (18) 5.2 流程图 (18) 5.3 源程序代码 (19) 参考文献 (25)
基于51单片机的波特率自动识别系统程序
#include
基于C51单片机矩阵键盘控制蜂鸣器的应用
学校代码 10126 学号科研创新训练论文 题目基于C51单片机的蜂鸣器和流水灯的 应用 院系内蒙古大学鄂尔多斯学院 专业名称自动化 年级 2013 级 学生姓名高乐 指导教师高乐奇 2015年06月20日
基于C51单片机的蜂鸣器和流水灯的应用 摘要 当今时代是一个新技术层出不穷的时代,在电子领域尤其是自动化智能控制领域,传统的分立元件或数字逻辑电路构成的控制系统,正以前所未见的速度被单片机智能控制系统所取代。单片机具有体积小、功能强、成本低、应用面广等优点,可以说,智能控制与自动控制的核心就是单片机。本文介绍了单片机的发展及应用,和基于单片机的蜂鸣器和流水灯的知识及应用,还介绍了此次我所设计的课题。 关键词:C-51单片机,控制系统,流水灯,蜂鸣器,程序设计
The application of buzzer and flowing water light based on C51 MCU Author:GaoLe Tutor:GaoLeQi Abstract This age is a new technology emerge in endlessly era, in the electronic field especially automation intelligent control field, the traditional schism components or digital logic circuit, is composed of control system with unprecedented speed was replaced by micro-controller intelligent control system. SCM has small, strong function, low cost, etc, it can be said that wide application, intelligent control and automatic control core is the micro-controller.This article introduces the MCU development and application,the knowledge and application of buzzer and flowing water light based on MCU,then introduces the task I have designed this time. Keyword:C51 micro-controller,control system,flowing water light,buzzer ,programming
51单片机串口通信
一、串口通信原理 串口通讯对单片机而言意义重大,不但可以实现将单片机的数据传输到计算机端,而且也能实现计算机对单片机的控制。由于其所需电缆线少,接线简单,所以在较远距离传输中,得到了广泛的运用。串口通信的工作原理请同学们参看教科书。 以下对串口通信中一些需要同学们注意的地方作一点说明: 1、波特率选择 波特率(Boud Rate)就是在串口通信中每秒能够发送的位数(bits/second)。MSC-51串行端口在四种工作模式下有不同的波特率计算方法。其中,模式0和模式2波特率计算很简单,请同学们参看教科书;模式1和模式3的波特率选择相同,故在此仅以工作模式1为例来说明串口通信波特率的选择。 在串行端口工作于模式1,其波特率将由计时/计数器1来产生,通常设置定时器工作于模式2(自动再加模式)。在此模式下波特率计算公式为:波特率=(1+SMOD)*晶振频率/(384*(256-TH1)) 其中,SMOD——寄存器PCON的第7位,称为波特率倍增位; TH1——定时器的重载值。 在选择波特率的时候需要考虑两点:首先,系统需要的通信速率。这要根据系统的运作特点,确定通信的频率范围。然后考虑通信时钟误差。使用同一晶振频率在选择不同的通信速率时通信时钟误差会有很大差别。为了通信的稳定,我们应该尽量选择时钟误差最小的频率进行通信。 下面举例说明波特率选择过程:假设系统要求的通信频率在20000bit/s以下,晶振频率为12MHz,设置SMOD=1(即波特率倍增)。则TH1=256-62500/波特率 根据波特率取值表,我们知道可以选取的波特率有:1200,2400,4800,9600,19200。列计数器重载值,通信误差如下表: 因此,在通信中,最好选用波特率为1200,2400,4800中的一个。 2、通信协议的使用 通信协议是通信设备在通信前的约定。单片机、计算机有了协议这种约定,通信双方才能明白对方的意图,以进行下一步动作。假定我们需要在PC机与单片机之间进行通信,在双方程式设计过程中,有如下约定:0xA1:单片机读取P0端口数据,并将读取数据返回PC机;0xA2:单片机从PC机接收一段控制数据;0xA3:单片机操作成功信息。 在系统工作过程中,单片机接收到PC机数据信息后,便查找协议,完成相应的操作。当单片机接收到0xA1时,读取P0端口数据,并将读取数据返回PC机;当单片机接收到0xA2时,单片机等待从PC机接收一段控制数据;当PC机接收到0xA3时,就表明单片机操作已经成功。 3、硬件连接 51单片机有一个全双工的串行通讯口,所以单片机和计算机之间可以方便地进行串口通讯。进行串行通讯时要满足一定的条件,比如计算机的串口是RS232电平的,而单片机的串口是TTL电平的,两者之间必须有一个电平转换电路,我们采用了专用芯片MAX232进行转换,虽然也可以用几个三极管进行模拟转换,但是还是用专用芯片更简单可靠。我们采用了三线制连接串口,也就是说和计算机的9针串口只连接其中的3根线:第5脚的GND、第2脚的RXD、第3脚的TXD。这是最简单的连接方法,但是对我们来说已经足够使用了,电路如下图所示,MAX232的第10脚和单片机的11脚连接,第9脚和单片机的10脚连接,第15脚和单片机的20脚连接。
MSComm串行通讯控件设置 串口、波特率等参数方法
MSComm串行通讯控件设置串口、波特率等参数方法(转 (2010-03-07 14:07:21) 转载 分类:程序设计 标签: it 一.想一进入程序,有默认的串口参数设置: 1.把参数值设定死 在OnInitDialog()函数里添加: if (m_ctrlComm.GetPortOpen()) m_ctrlComm.SetPortOpen(FALSE); m_ctrlComm.SetCommPort(1); // 选择com1 if (!m_ctrlComm.GetPortOpen()) m_ctrlComm.SetPortOpen(TRUE); // 打开串口 else AfxMessageBox("cannot open serial port"); m_ctrlComm.SetSettings("9600, n, 8, 1"); // 波特率9600,无校验,8个数据位,1个停止位 m_ctrlComm.SetInputMode(1); // 1表示以二进制方式检取数据 m_ctrlComm.SetRThreshold(1); // 参数为1,表示每当串口接收缓冲区中有对于或等于一个字符时,将引发一个接收数据的OnComm事件 m_ctrlComm.SetInputLen(0); // 设置当前接收区数据长度为0 m_ctrlComm.GetInput(); // 先预读缓冲区以清除残留数据
2. 用COMBO BOX下拉框选择串口、波特率 m_cbPortSelect.ResetContent(); m_cbPortSelect.AddString(_T("COM1")); m_cbPortSelect.AddString(_T("COM2")); m_cbPortSelect.AddString(_T("COM3")); m_cbPortSelect.AddString(_T("COM4")); m_cbPortSelect.AddString(_T("COM5")); m_cbPortSelect.SetCurSel(3); m_cbPortRate.ResetContent(); m_cbPortRate.AddString(_T("1200")); m_cbPortRate.AddString(_T("2400")); m_cbPortRate.AddString(_T("4800")); m_cbPortRate.AddString(_T("9600")); m_cbPortRate.SetCurSel(0); 二.想动态地设置串口相关参数: CString str_setting; str_setting.Format(_T("%d, %c, %d, %d"), baud_num, 'n', 8, 1); m_ctrlComm.SetSettings(str_setting); // 设置波特率,校验位,数据位,停止位;m_ctrlComm是通信控件变量 想在Edit Box里显示实时值: