低速风洞稳风速控制系统的设计

文章编号:10035850(2005)12005503
低速风洞稳风速控制系统的设计
Design of Control System of Holding Wind Velocity
for Low Speeding Wind Tunnel
宋 伟 施洪昌
(江苏技术师范学院 常州 213001)(中国空气动力研究与发展中心 绵阳 261000)
【摘 要】在风洞模型试验过程中,洞内风速是否稳定将直接影响到实验结果的准确性,因此,稳风速控制系统是风洞测控系统中重要组成部分。以江苏技术师范学院信控研究所研制的低速风洞测控系统为例,简要介绍其稳风速控制过程。
【关键词】稳风速,测控系统,控制过程
中图分类号:T P 273
文献标识码:A
ABSTRACT Dur ing the ex per iment of w ind tunnel mo del,the steady o f w ill directly affect the accur acy o f ex perim ent result,so the contr ol sy stem o f ho lding w ind v elo city is the impor tant co mponent o f mea sur ement and co nt ro l system in w ind t unnel .T his pa-per w ill take an ex ample of measurement and contr ol sy st em fo r successive low speeding wind tunnel developed by info rmation co n-tr ol r esear ch institute o f Jiang su T eachers U niver sity ,br iefly intr oduce its co mponets and contr ol pr ocedur e o f co nt ro l sy stem o f holding w ind velocity ,a nd analyze kinds o f inter ference ex cited in sy st em ,and then adv ance so me effective measurement of inhibi-tio n interfer ence .
KEYWORDS ho ld w ind v elo city ,measur ement and contr ol system ,co nt ro l pro cedur e
连续式低速风洞由一台风扇提供试验气流,其吹风速度一般低于60m /s ,为了实现对其洞内气流稳风速控制,要求风扇转速控制的调整比为1:10~1:20,能无级变速;稳速精度为0.1%~0.2%;额定转速在30m in 内漂移小于0.1%~0.2%。
1 系统硬件设计
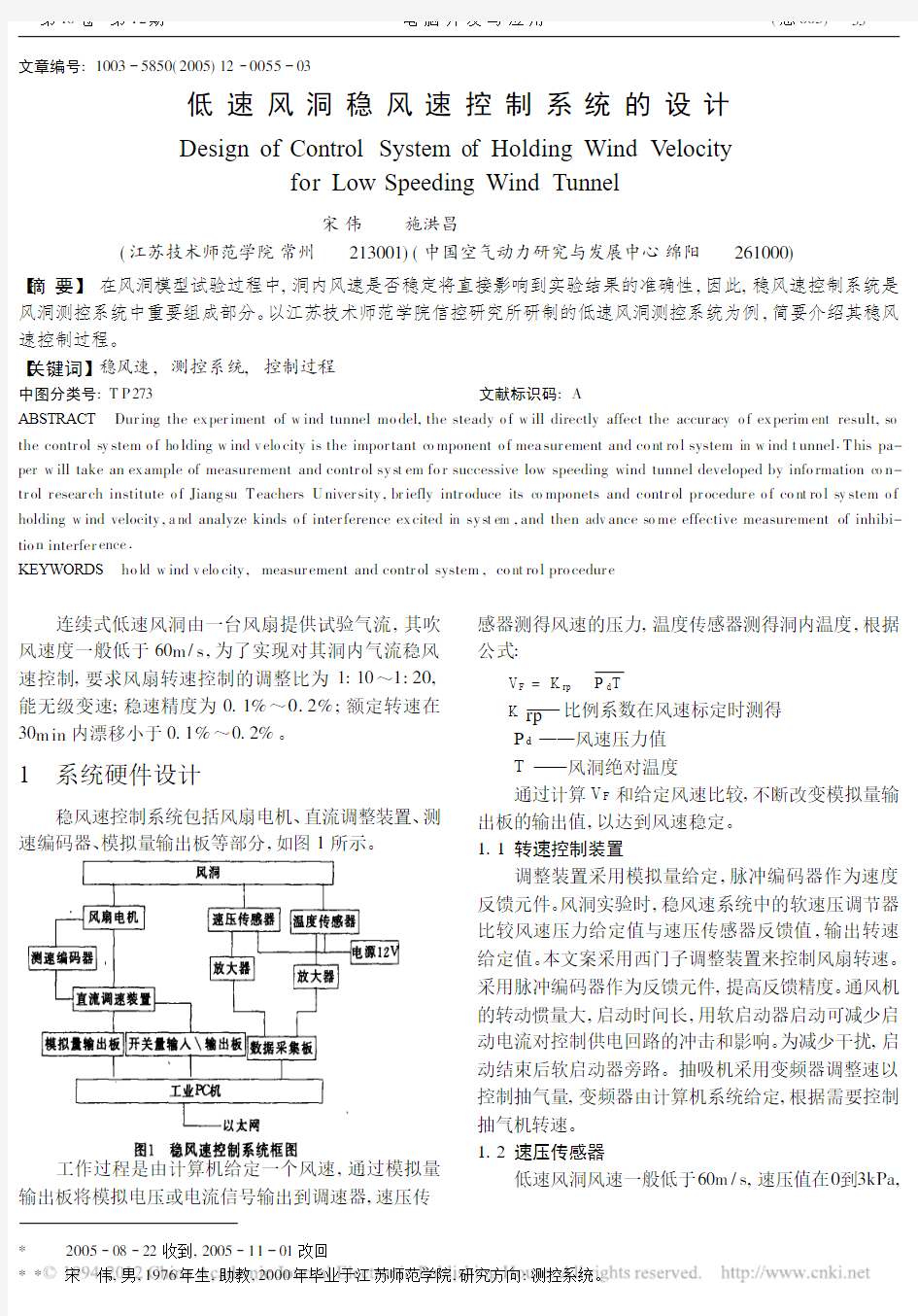
稳风速控制系统包括风扇电机、直流调整装置、测速编码器、模拟量输出板等部分,如图1
所示。
工作过程是由计算机给定一个风速,通过模拟量输出板将模拟电压或电流信号输出到调速器,速压传
感器测得风速的压力,温度传感器测得洞内温度,根据公式:
V F =K rp P d T
K
rp ——比例系数在风速标定时测得P d ——风速压力值T ——风洞绝对温度
通过计算V F 和给定风速比较,不断改变模拟量输
出板的输出值,以达到风速稳定。
1.1 转速控制装置
调整装置采用模拟量给定,脉冲编码器作为速度反馈元件。风洞实验时,稳风速系统中的软速压调节器比较风速压力给定值与速压传感器反馈值,输出转速给定值。本文案采用西门子调整装置来控制风扇转速。采用脉冲编码器作为反馈元件,提高反馈精度。通风机的转动惯量大,启动时间长,用软启动器启动可减少启动电流对控制供电回路的冲击和影响。为减少干扰,启动结束后软启动器旁路。抽吸机采用变频器调整速以控制抽气量,变频器由计算机系统给定,根据需要控制抽气机转速。1.2 速压传感器
低速风洞风速一般低于60m /s,速压值在0到3kPa,
* 20050822收到,20051101改回
** 宋 伟,男,1976年生,助教,2000年毕业于江苏师范学院,研究方向:测控系统。
?55?第18卷 第12期 电脑开发与应用 (总805)
本系统选用CYG222系列固态压阻传感器,传感器性能指标如下。
量程:1~3kPa 。非线性:±0.05%。反复性:0.02%。满量程输出:0~5V 。过载能力:100%。零点漂移:<0.1mV /8h 。零位温度系数:0.6×10-4/℃。灵敏度温度系数:0.4×10-4/℃。使用温度范围:-25℃~100℃。速压传感器安装在风洞试验段的顶部用七孔探针把速压从风洞中引到洞外,探针伸进风洞内深度要跃过边界层厚度(大于45cm ),探针上一个总压管一个静压管分别接速压传感器的正负接头。速压传感器供电电源用12V 供电。电源精度为0.01%,传感器最大输出信号为5V ,经滤波后送数据采集板。1.3 温度传感器
温度传感器测量试验段温度,用于修正风速,采用铂电阻传感器Pt100,测量温度范围0~100℃,精度±0.1℃,它的原理是将温度变化转换成电阻值
变化量
0.385 /℃。为了把电阻变化值变成电压变化值,电路
中加3个精密电阻和铂电阻组成电桥,如图2所示。铂电阻在零温度时电阻为100 ,为了保持桥在零温度是输出电压为0,R 1取值为100 ,R 2、R 3取相等电阻值,电桥电路中流过铂电阻的电流不能过大,否则,铂电阻发热产生温度效应引起测温误差。流过电流在1mA 左右为好,电桥的供电电压为12V ,所以R 2、R 3取10K ,R 1、R 2、R 3应选温度稳定性高的精密电阻。
温度校正:用冰水在0℃、常温下、50℃时各测一个输出值,三点就得到一个斜率,这样就算出温度系数。
1.4 安全联锁
为了使风洞安全可靠运行,在系统中设计安全联锁系统包括:调速系统报警、风速超过最大值报警停车、电枢电流不正常报警、励磁电流不正常报警。在软件中有故障提示,硬件有故障复位。为了实现安全联锁在硬件上配置开关量输入输出板,在设备出现故障要有相应的电位或节点闭合或断开的表示,在软件设计中定时检测这些故障输入的开关量情况,采到某个故障量后进行分析,判断出是哪个设备的故障,并发出报警或停车,并在CRT 显示器上显示。
2 系统软件设计
稳风速控制软件是稳风速控制系统的核心系统,
它以系统硬件为基础,配合硬件对风洞内的速压(风速)进行控制。系统软件选用美国NI 公司开发的基于C 语言的Lab Window s/CVI 软件开发平台,适用于自动测试、自动控制、测试仪器通信、测试硬件控制和信号分析处理的软件开发。总体流程如图3所示。
该软件的功能是在每次吹风前,设定本次吹风的风速并启动风
机,通过读取数据采集板数据实时跟踪记录风洞内温度、速压,根据风速公式的算法编制计算机运算程序,再通过模拟量输出板将模拟量送入调速装置来改变风机转速,从而实现风速的闭环控制。
3 抗干扰措施
干扰进入系统有传导和辐射两种,传导干扰通过电源线、信号线、地线进入系统,辐射干扰通过空间进入。根据干扰产生的原因,应采取如下抗干扰措施:
对电源系统干扰,在电网进入控制间的交流电源采取隔离滤波措施,应在控制间加一台3kW 超级隔离变压器,再到交流参数稳压器,它具有稳压、滤波、抗干扰和防雷击等作用。 产生干扰源设备应远离控制间,如交流调速器等。 动力线和信号线分开连线,应分别穿铁管,铁管应接地。 风洞实验室应安装仪表地(弱点地线)和动力地(强电地线),弱点地线接地电阻小于4 ,测控系统设备地线汇总一点接地。 信号输入回路应加滤波器。 小信号加抗干扰能力强的信号调理器。 选用抗干能力强的工业PC 机,这种工控机的主板电源、硬盘都有较强的电磁兼容性,机箱结构可靠抗震。 选用抗干扰能力强的数据采集板。 在系统中采取一系列硬件抗干扰措施后,若还有干扰信号则一般用软件方法采取数字滤波。
在低速稳风速控制系统的设计开发过程中,除了上述几个大的方面以外,传感器精度、放大器的噪音及线性度等因素也将直接影响系统的正常工作,开发人员应引起注意。该系统经过安装调试后,转速控制精度为±0.1%,风速控制精度为±0.5%,其他各项指标均达到了设计要求,系统操作方便,工作稳定可靠。
参考文献
[1] 张凤均.L abWindow s/CV I 开发入门和进阶.北京:北京
航空航天大学出版社,2001.
[2] 施洪昌.风洞测控系统干扰及抑制.工业控制计算机,
2004(7):78.
?
56? (总806) 低速风洞稳风速控制系统的设计 2005年
简易风洞及控制系统
简易风洞及控制系统(G题) 摘要:本帆板控制系统由单片机ATMEGA328作为帆板转角的检测和控制核心,实现按键对风扇转速的控制、调节风力的大小、改变帆板转角θ、液晶显示等功能。引导方式采用角度传感器感知与帆板受风力大小的转角θ的导引线。通过PWM波控制电机风扇风力的大小使其改变帆板摆动的角度θ。风扇控制核心采用L298电机驱动模块,用ATMEGA328单片机为控制核心,产生占空比受数字PID 算法控制的PWM脉冲,实现对直流电机转速的控制,同时利用光电传感器将电机速度转化成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。MMA7455三轴加速传感器把角度输出信号传送给ATMEGA328单片机进行处理。 关键词:ATMEGA328,MMA7455,PWM波,PID算法
目录 1. 系统设计 1.1 任务与要求 1.1.1 主要任务 1.1.2 基本要求 1.1.3 说明 1.2总体设计方案 1.2.1 设计思路· 1.2.2 方案论证与比较 1.2.3 系统的组成 2. 单元电路设计 2.1 风速控制电路 2.2小球测距原理 2.3控制算法 3. 软件设计 3.1风速控制电路设计计算 3.2控制算法设计与实现 3.3程序流程图 4. 系统测试 4.1 调试使用的仪器与方法 4.2 测试数据完整性 4.3 测试结果分析 4.4 结束语 5. 总结 参考文献 附录1 元器件明细表 附录2 电路图图纸 附录3 程序清单
1.1任务与要求 1.1.1 主要任务 设计制作一简易风洞及其控制系统。风洞由圆管、 连接部与直流风机构成,如图所示。 圆管竖直放置,长度约40cm,内径大于4cm且内 壁平滑,小球(直径4cm黄色乒乓球)可在其中上下运 动;管体外壁应有A、B、C、D等长标志线,BC段有 1cm间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部应有防止小球落入连接部的格栅。控制系统通过调节风机的转速,实现小球在风洞中的位置控制。 1.1.2 基本要求 (1)小球置于圆管底部,启动后5s内控制小球向上到达BC段,并维持5s 以上。 (2)当小球维持在BC段时,用长形纸板(宽度为风机直径的三分之一)遮挡风机的进风口,小球继续维持在BC段。 (3)以C点的坐标为0cm、B点的坐标为10cm;用键盘设定小球的高度位置(单位:cm),启动后使小球稳定地处于指定的高度3s以上,上下波 动不超过±1cm。 (4)以适当的方式实时显示小球的高度位置及小球维持状态的计时。(5)小球置于圆管底部,启动后5s内控制小球向上到达圆管顶部处A端,且不跳离,维持5s以上。 (6)小球置于圆管底部,启动后30s内控制小球完成如下运动:向上到达AB段并维持3~5s,再向下到达CD段并维持3~5s;再向上到达AB段 并维持3~5s,再向下到达CD段并维持3~5s;再向上冲出圆管(可以
小型风洞设计制作及稳定段研究
小型风洞设计制作及稳定段研究 摘要风洞是从事飞行器研制和空气动力学研究的最基本的实验设备。迄今为止绝大部分空气动力学实验都是在风洞中完成的。风洞的发展是同航空航天技术紧密相关的,风洞是研制新型飞行器的重要物质基础。稳定段及其内部的整流装置是风洞不可或缺的组成部分。整流装置包括纱网和蜂窝网等,其设计目的是使气流均匀或降低紊流度。 关键词小型风洞;纱网;均匀性;稳定段;能量损失 在本次研究中,设计并动手制作可用于实际操作的小型风洞,着重对其稳定段进行研究,从而设计出适合于一类小型风洞的稳定段。一方面,在理论计算与实验中记录有意义的数据,为以后进一步的研究提供依据。另一方面,此次研究所制作出的小型风洞,可以用于实际的风洞实验,如小型风力发电机的测试等。 在研究的前期进行小型风洞的设计,绘制小型风洞的设计图纸。在研究的第二阶段,根据设计动手制作小型风洞。在制作过程中,不断根据实际情况,对图纸细节进行调整和改进。在研究的第三阶段,对已制作完成的小型风洞稳定段中的纱网进行控制变量的研究与分析。 对于低速小型风洞,进口风速为10m/s~18m/s时,在综合气流均匀性、稳定性和气流能量3个指标之后发现,网丝直径d与网眼尺度l的比值为0.37,每层纱网间距为2cm的三层纱网组合为最优纱网组合。 1 研究方法及过程 1.1 小型风洞的设计 1.1.1 风洞整体的布置 小型风洞是由风扇、风洞本体和测量仪器系统三部分组成。 如图1所示为风洞的整体布置图。①为风扇。②为风洞本体。③为传感器组 1.1.2 风扇的设计 根据研究需要,风扇选用具有调速功能的低速风扇,其风速范围为:10m/s ~20m/s。出风口为正方形,内径为11.6cm,外径为12cm。在风洞的出口和进口,分别放置两个相同型号的风扇,进口的风扇向风洞内鼓风,出口的风扇从风洞内吸风,并始终调节两风扇的鼓风风速相同。这样的设计可以在一定程度内令风洞内的气体密度保持恒定。 1.1.3 风洞本体的设计 风洞本身共分为三段,内有两个为消除涡流而装置的蜂窝器和两套为平稳气流而装置的纱网。风洞洞体材料选为有机玻璃,既保证强度,又便于观察。 1)实验段 由于所设计风洞属于低速风洞范畴,因而不同实验段截面形状的洞壁干扰情况大致相似。而方形截面相对于其他形状截面有易于安装门窗、有利于观察实验等优点。根据研究需要,本次设计确定洞体横截面为正方形,内径15cm。根据经验公式,风洞的试验段长度L=2.0~2.5D\* MERGEFORMAT,其中D为实验段直径。因此,本次设计的实验段长度为L=40cm。 2)收缩段 此设计中,一方面为尽量避免气流在洞壁上产生分离,另一方面为减少能量损失,收缩段的长度采用进口直径的0.5倍~1.0倍\* MERGEFORMAT。因此,取收缩段长度为10cm。
风洞静态压力分布测量实验
《实验流体力学》 风洞静态压力分布测量实验Ⅰ实验设计及数据处理程序编制Ⅱ数据采集与分析 姓名 学号 实验日期 指导老师
一、实验目的 风洞测压试验是一种在风洞中测量模型表面压力分布的试验。目的是通过测量飞行器及其部件,如机翼、机身、尾翼、操纵面、外挂物等表面上的压力分布,为飞行器及其部件结构强度计算提供气动载荷分布的原始数据。通过测压实验,能够给出定量化的结果,获得模型上的压力分布信息。因此,测压试验是研究模型气动特性、验证数值计算方法的一种重要手段。 本次实验内容是测定标准模型在不同实验状态下各截面测压点的压力值,并进行数据处理,最后得到各截面的压力分布曲线随风速及迎角的变化规律。 二.实验设备 1、风洞 风洞是产生人工气流的设备,本次实验所用风洞为开口回流式低速风洞,如图1所示。其主要组成部分为实验段、扩压段、拐角和导流片、稳定段、收缩段以及动力段。 D4 风洞 实验段 风 扇 图1 D4风洞示意图 实验段尺寸:长度3.5m ,宽度1.5m ,高度1.5m ,收缩比9;实验段风速:闭口最高风速为80m / s, 开口最高风速为60m / s ;实验段湍流度为0.08%。 2、风速控制系统 D4风洞采用可控硅控制无级调速;风速控制系统组成如图1所示。本文的工作是在系统的外层增加了稳风速的闭环控制系统。风洞风速的控制采用直接数字式闭环控制。首先通过PCL727进行D/A 转换,将数字量转换成模拟量4—20mA 驱动电流,经过西门子驱动器来控制可控硅的输出电流,从而控制电机转速,电机拖动风扇,产生气流,使试验段获得所需的速压0P P (其中0p 为气体总压,p 为气体静压)。由差压变送器将压差转换成1-5V 电压,再由压差风速转换公式计算得出风速值,经PCI1716进行A/D 转换,将数字量输入计算机,通过数字PID 控制器输出控制量,从而改变输出的驱动电流,达到控制风速的目的。 三、实验模型: 1、实验模型:非圆截面机身标准测压模型,如图2所示。
风洞设计
低速风洞气动特性设计(2) 一、课程设计目的 综合运用在流体力学实验技术和其它课程中所学习的知识,完成简化了的低速风洞气动特性设计项目,达到培养和提高独立完成设计工作的能力。 二、课程设计要求 能正确运用有关学科的基本理论解决工程实际问题。图纸符合规范,清楚,整洁。设计说明书中文字、数字和插图表达清晰正确。设计中对工艺性、经济性作了考虑。工作态度认真负责,按时、独立完成指定的设计任务。 三、设计风洞任务要求 1)风洞实验段要求:开口 2)实验段进口截面形状:椭圆形 3)实验段进口截面尺寸:1.5m 4)实验段进口截面最大风速:50m/s 5)收缩段的收缩比:5 四、风洞设计说明书 根据实验段进口截面尺寸判断:我们小组所设计风洞为小型风洞 1、实验段设计 实验段是整个风洞的中心,模型装在此处进行实验。衡量风洞气动力设计及施工的质量主要从两方面来看:实验段气流的流场品质;风洞工作的效率。实验段的气流品质是风洞各部分工作的集中体现。
实验段截面形状选择 选择剖面形状的原则是在满足实验要求下最有效地利用全部气流切面积,因而可以减少风洞的驱动功率。实验段截面形状有圆形、方形、八角形、椭圆形及长方形等。 在相似的稳定段情况和相同的收缩比下,椭圆形截面的气流最为均匀,即均匀区所占的比例最大,圆形次之,长方形再次之;从洞壁干扰的情况来看,对于相同的模型展长洞宽比,椭圆形的升力干扰最小,长方形次之,圆形再次之。 因此,我们所设计实验段椭圆形截面有流场均匀、气流品质好、洞壁干扰小的优点。但,从施工和安装来讲,椭圆形不方便,这也是弊端所在。 实验段截面尺寸选择 椭圆截面按照长轴短轴比3:2设计,则长轴长1.5m ,短轴长1m 。 设长半轴为a ,短半轴为b ,则a=0.75m,b=0.5m 定义椭圆截面水力直径椭圆 椭圆C S D ?=40,且)(4b 2,b a C ab S -+==ππ椭圆椭圆 求得:m D 14.10= 实验段开口式、闭口式的选择 本实验任务要求采用开口式,优点在于:安装模型及进行实验方便;在相同的模型和风洞尺寸关系下,开口实验段的边界层干扰要小得多。但相比于闭口式,缺点在于:实验段气流均匀性差,且容易产生脉动,为保证实验数据准确性,模型应该置于等紊流度区域内,因而模型尺寸受限。 实验段长度确定 实验段长度可以分为三部分模型头部至实验段入口的距离1l 、模型长度2l 、模型尾部至
区域气象自动监测系统设计及建设
区域气象自动监测系统设计及建设 近年来,气象综合观测系统建设快速发展,全国地面气象观测站已全部完成自动气象站的建设,区域自动气象站作为综合观测体系的重要组成部分具有量大面广特点,并且由省级保障部门进行技术指导,市、县两级保障。随着对气象观测数据的精度要求越来越高,根据新一代气象观测网络建设的规划,已建成1657个新型区域自动气象观测站,实现了区域自动气象站全省乡镇全覆盖和618 个山洪地质灾害点气象监测,加上土壤水分观测自动气象站、交通气象自动气象站的建设,共同为气象预报预测、决策气象服务、公共气象服务、气象防灾减灾发挥了极其重要的作用。 区域气象自动监测系统是针对区域范围内,可能会对人的生产生活造成影响的气象要素,进行长时间区域范围内不间断的准确监测而设计开发的一款标准区域气象监测站。主要应用于城市降水网络、山洪预警、森林生态、核电厂环境监测等应用。主要监测要素是雨量、风向、风速、太阳辐射、气压、温度、湿度等气象参数。 一、系统内容 该区域气象监测系统是方大天云设计的支持站点参数、实时数据、历史数据、加密间隔、运行状态等信息的远程维护,极大地方便了用户使用和日常维护工作。此外自动站可实现自动电源管理,数据自动
采集、存储、通讯、分析等功能,能够满足灾害性天气监测、降水过程加密观测及多种形式气象保障和气象服务的需求。 二、系统指标 风速 0~60m/s;精度:3%(0-35m/s);5%(>35m/s) 风向 0~359.9°;精度:±3° 降水强度 0~200mm/h;精度:5% 降水类型雨/雪 大气压力 300~1200 hPa;精度:±1.5hPa 空气温度 -50~60°C;精度:±0.2°C(-20~+50°C)‘±0.5°C(>-30°C 空气湿度 0~100%RH;精度:±2%RH 通讯接口 RS232/RS485,板载GPRS 供电方式交流220V/太阳能+蓄电池 工作环境温度 -50~+50℃ 工作相对湿度 0~100%RH 防护等级 IP65 可靠性免维护,防盐雾,防尘 功耗 3-30W 三、功能特点 具有极强针对性的区域范围气象监测设备
动态压力测量方法
动态压力风洞实验数据处理软件 使用手册
目录 第一章绪论 (1) 1.1风洞数据采集系统特点 (1) 1.2风洞数据采集系统现状与发展 (2) 1.3本软件主要功能特点 (3) 第二章动态压力测量方法 (5) 2.1 测压导管的传递函数 (5) 2.2 两通道的传递函数 (6) 2.3 不同外径导管传递函数的模值比和相位差 (7) 2.4 动态数据处理技术 (11) 2.5 结论 (12) 第三章动态压力风洞实验数据处理软件的设计与实现 (13) 3.1 软件需求分析 (13) 3.2 软件功能设计 (14) 3.3软件流程设计 (15) 3.4 软件界面设计 (17) 第四章动态压力数据处理系统调试 (24) 4.1 动态线性度检定 (24) 4.2 动态误差限检定 (24)
第一章绪论 1.1风洞数据采集系统特点 风洞是进行空气动力学研究的重要试验装置。风洞试验装置包括测量系统、数据采集系统、模型姿态及控制系统、风速控制系统等。风洞试验中要采集大量的数据,主要有试验模型的升力、阻力、力矩、模型表面压、温度、洞体压力、模型角度等,这些数据依靠热线风速仪、压力扫描阀、应变天平、激光位移计、加速度传感器等进行量测。早期,风洞试验为人工读数和手动方式,试验周期长,数据量大,试验精度低,处理周期长。为了提高风洞试验效率、试验精度及试验水平,从20世纪70年代开始,各风洞逐步引入了数据采集系统。由数据采集系统负责将来自天平或压力传感器等测量系统的电信号转化成数据,通过多通道数据采集板,把传感器送出的模拟信号转化成数字信号送计算机存储。 风洞数据采集系统具有如下特点: (1)高速、高精度、具有强的抗干扰能力 风洞试验数据的精度直接影响到试验对象的空气动力学设计的正确性。风洞数据采集系统应具有高速、高精度、具有强的抗干扰能力。气动力系数中模型的阻尼系数△CX的试验精度要达到0.0001,风洞各参数测量精度要求为总压精度0.07%,静压精度0.07%,总温精度1%,法向力精度0.08%,轴向力精度0.08%,迎角精度0.01%。 目前计算机技术在速度和内存量等方面不断提高,为高速、高精度、多路并行采集以及实时数据传输等创造了必要的条件。单路A/D数据采集系统来分时采集的多路数据采集系统在风洞试验中己成为基本配置,但其不能满足真正的实时、同步采集的要求。并行动态数据采集系统已成为一个基本的发展趋势。它将多路A/D采集电路并行处置,用同一个触发信号同时启动各路A/D进行编码,保证了各路信号采集的严格同步性,对某瞬态时刻各路信号的分析具有十分重要的意义。同时由于不再使用模拟开关,使各路信号间的串模干扰减到了最小,系统精度可获得进一步提高。 (2)采集参数多,点数多
简易风洞及控制系统
简易风洞及控制系统 This model paper was revised by the Standardization Office on December 10, 2020
简易风洞及控制系统(专科组G题) 作者:王康、赵辉、张帅帅 赛前辅导教师:吉武庆 文稿整理辅导教师:吉武庆 摘要 本文介绍了简易风洞控制系统的设计方案。本设计以STC89C52RC单片机为主控芯片,利用涡轮式轴流风机来为小球的运动提供动能。通过在风洞表面安装的8个光电式光线传感器来检测小球位置,而后通过PID算法对轴流风机的抽风量进行进一步调校.从而形成一个完整的闭环控制系统。 关键词:PID算法,PWM调速,闭环控制 Abstract This paper introduces the design plan of a simple wind tunnel control system. The design STC89C52RC microcontroller as the main control chip, using turbine type axial flow fan to provide kinetic energy for the movement of the ball. To detect the location of the ball in a wind tunnel by surface mounted 8 photoelectric light sensor, and then through the exhaust volume PID algorithm flow fan on the shaft was further adjusted. So as to form a complete closed-loop control system. Keywords: PID algorithm, PWM speed control, closed loop control
风洞设计
低速风洞内气流速度较低,可按不可压缩流动来设计计算,设计的主要问题是合理组合收缩比与整流装置,使风洞具有高的能量比,低的湍流度,低的造价;设计高效率的风扇装置;设计没有气流分离的的收缩曲线以保证流动品质。可遵循现有的性能良好的风洞所建立的准则进行设计。 相似准则: 一个在静止空气中运动的物体或者在气流中保持静止的物体,其受到的空气动力R 取决于一系列有关气流与物体的参数,即 R=f (L 、v 、ρ、h 、α、β、E 、n s 、m 、P 、μ、2 v 、Cp 、Cv 、λ、V ) L ——物体的特性长度(m ) V ——物体的运动速度(m/s ) ρ——空气的密度(kg/m 3) h ——物体表面粗燥度的特性尺寸(m ) α——运动的迎角(°) β——运动的偏航角(°) E ——模型的体积弹性系数,V V p E /?= (Pa ) n s ——运动部件的频率或转数(1/s ) m ——物体单位长度的质量(kg/m ) P ——空气的压力(Pa ) μ——空气的粘性系数(Pa ?s ) 2v ——空气平均脉动速度的平方(m 2/s 2) Cp ——空气的定压比热(J/(kg ?K )) Cv ——空气的定容比热(J/(kg ?K )) λ——空气的热传导系数(W/(kg ?K )) V ——物体体积(m 3) 以上影响气动力的参数共15个,根据量纲理论,由于这15个参数的单位中包括4个基 本单位,则气动力系数C R ( 2221L v R C R ρ-= )将取决于12个无量纲参数,这些无量纲 参数就称为相似准则。 )k e a m a (2P F R M S L C F C R 、、、、、、、、、、、ερβ?= ?——物体表面相对粗糙度,L h =? C ——表征物体弹性形变的相似准则, 2v E C ρ=
超声波风速风向仪设计说明
& 超声波风速风向仪设计 1.研究背景及意义 风速测量在工业生产和科学实验中都有广泛的应用,尤其在气象领域,风速测量更有着重要的价值。风速测量,常用的仪表有杯状风速计、翼状风速计、热敏风速计和超声波风速计。杯状风速计和翼状风速计使用方便,但其惰性和机械摩擦阻力较大,只适合于测定较大的风速。热敏风速计利用热敏探头,其工作原理是基于冷冲击气体带走热元件上的热量,借助一个调节开元器件保持温度恒定,此时调节电流和流速成正比。这种测量方法需要人为的干预,而且此仪表在湍流中使用时,来自各个方向的气流同时冲击热元件,会影响到测量结果的准确性。现阶段常采用基于超声波传播速度受风速影响因而增减原理制成的超声波风速仪表,与其它各类仪表相比较,其优势在于:安装简单,维护方便;不需要考虑机械磨损,精度较高;不需要人为的参与,可完全智能化。 2.国外研究历史及发展状况 超声波可用于测量,是因为在超声波在传播过程中,会加载流体的流速信息,这些信息经过分离处理,便可以得到流体的流速。70年代中后期,大规模集成电路技术的飞速发展,高精度的时间测量成为一件轻而易举的事情,再加上高性能的、动作非常稳定的PLL(锁相环路)技术的应用,使得超声波流量计的稳定可靠性得到了初步的保证。同时为了消除声速变化对测量精度的影响,出现了频差法、锁相频差法等。该类方法测量周期短,响应速度快,而且几乎完全消除了声速对测量精度的影响。80年代,超声波测量出现了新的方法,比如射束位移法、多普勒法和相关噪声法等等。90年代才真正实现了高精度超声波气体流量计。 从国、外超声波气体测量发展来看,国外机构开展这项工作的时间较早,到现在为止已经形成较为成熟的产品。当今世界,超声波流量计用于气体流量计的研究与开发方面,荷兰的工nstromet公司、英国的Dnaiel公司以及美国的Cnotrolotmo公司均做出了大量的工作并取得了较好的应用效果,其销售份额也排在前几位。日本在超声波气体流量计的设计方面也具有很大的优势,在消除管
低速风洞课程设计
2015/2016学年第一学期 低速风洞设计 课程名称:工程流体力学课程设计 班级:新能源1312 小组成员: 指导教师:郭群超老师
目录 一课程设计目的 (3) 二.完成设计任务条件 (3) 三、完成的任务 (3) 四、具体设计 (3) 4.1 实验段 (4) 4.2收缩段 (5) 4.3稳定段 (6) 4.4扩压段 (7) 4.5其他部件设计 (10) 五.能量比 (11) 六.需用功率 (15) 七.心得体会 (15) 八.参考文献 (16)
一、课程设计目的 综合运用在流体力学实验技术和其它课程中所学习的知识,完成简化了的低速风洞气动特性设计项目,达到培养和提高独立完成设计工作的能力。 二、完成设计任务的条件 (1)风洞试验段要求:闭口 (2)实验段进口截面形状:矩形 (3)实验段进口截面尺寸:2.5mX3.0m (4)试验段进口截面最大风速:100m/s (5)收缩段的收缩比:7 三、完成的任务 (1)低速风洞设计图纸绘制 (2)设计说明书:我们组设计的是小型低速风洞 (3)风洞设计、研制与实验技术研究方面的综述报告 四、具体设计
4.1 实验段 ① 为了使模型处于实验段的均匀流场之中,模型头部至实验段入口应保持一定的距离,以1l 表示。1l 的大小视实验段入口流场的均匀程度而定。如实验段直径为0D ,则1l 大致为0.25~0.500D 。因为后面我们会采用较多层的紊流网,故此处不用取得太大,选择100.35l D =。 ② 模型的长度为2l 表示,大约在0.75~1.250D 之间,各类飞机的模型是不相同的。为了使风洞尽量满足一洞多用,取2l 足够长选择201.25l D =。 ③ 模型尾部至扩压段进口也应保持一定距离,以3l 表示,一方面是保证模型的尾流不过多影响扩压段的工作效率,另一方面也不使扩压段的流动影响模型尾部。这个距离大约为0.75~1.25 0D 。选择300.8l D = ④ 12302.4 6.55L l l l D m =++==,满足统计数据中,主要
风速风向检测
基于单片机的风速风向检测系统设计 时间:2011-03-01 16:46:08 来源:电源技术应用作者: 摘要:介绍了一种风速风向传感器原理,选用LPC921单片机设计了数据采集和数据传输的检测系统,给出了系统硬件电路图和软件流程图,分析了硬件设计和软件编程中的一些问题。 1 引言 风速风向测量是气象监测的重要组成部分, 测量风速风向对人类更好地研究及利用风能和改善生活生产有积极的影响。 本系统针对传感器的特点选用了LPC921 单片机,通过I/O 口输出高低电平,通过放大电路驱动继电器,控制传感器电源的开关。利用单片机的两个通用定时计数器, 对风速脉冲进行定时和计数, 通过计算单位时间内的脉冲数计算出风速。风向则是检测输入的风向格雷码, 将格雷码转换成二进制码, 通过查表的方式求出风向角度, 最终确定风向。最后设计RS485 通信协议,保证通信可靠性, 将风速风向数据送往上位机进行显示和发布。 2 传感器工作原理 本系统采用长春气象仪器研究所的EC9 -1 系列高收稿日期:2010-03-05动态性能测风传感器。EC9 - 1 系列传感器具有动态性能好、线性精度高、灵敏度高、测量范围宽、互换性好、抗风强度大等特点。 风速传感器的感应组件为三杯式风杯组件, 当风速大于0.4m/s 时就产生旋转, 信号变换电路为霍尔集成电路。在水平风力驱动下风杯组旋转, 通过主轴带动磁棒盘旋转, 其上的数十只小磁体形成若干个旋转的磁场, 通过霍尔磁敏元件感应出脉冲信号, 其频率随风速的增大而线性增加。 计算公式:V=0.1F。 V:风速,单位:m/s; F:脉冲频率,单位:Hz风向传感器的感应组件为前端装有辅助标板的单板式风向标。角度变换采用的是七位格雷码光电码盘。 当风向标随风旋转时, 通过主轴带动码盘旋转, 每转动2.8125°,位于码盘上下两侧的七组发光与接收光电器件就会产生一组新的七位并行格雷码,经过整形、倒相后输出。方位- 角度- 格雷码- 二进制码对照表是风向测量单片机编程的重要依据。传感器结构组成如图1 所示。
简易风洞设计(带有程序)
简易风洞设计 需要的材料 风机,小球,51单片机,风机驱动模块,液晶1602,超声波,电源 设计任务 设计制作一简易风洞及其控制系统。风洞由圆管、连接部与直流风机构成。圆管竖直放置,长度约40cm,内径大于4cm且内壁平滑,小球(直径4cm黄色乒乓球)可在其中上下运动;管体外壁应有A、B、C、D等长标志线,BC段有1cm间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部应有防止小球落入连接部的格栅。控制系统通过调节风机的转速,实现小球在风洞中的位置控制。 设计要求 (1)小球置于圆管底部,启动后5秒内控制小球向上到达BC段,并维持5秒以上。(20分) (2)当小球维持在BC段时,用长形纸板(宽度为风机直径的三分之一)遮挡风机的进风口,小球继续维持在BC段。(10分) (3)以C点的坐标为0cm、B点的坐标为10cm;用键盘设定小球的高度位置(单位:cm),启动后使小球稳定地处于指定的高度3秒以上,上下波动不超过±1cm。(10分)(4)以适当的方式实时显示小球的高度位置及小球维持状态的计时。(10分) 小球置于圆管底部,启动后5秒内控制小球向上到达圆管顶部处A端,且不跳离,维持5秒以上。(10分) (5)小球置于圆管底部,启动后30秒内控制小球完成如下运动:向上到达AB段并维持3~5秒,再向下到达CD段并维持3~5;再向上到达AB段并维持3~5,再向下到达CD段并维持3~5;再向上冲出圆管(可以落到管外)。(20分) (6)风机停止时用手将小球从A端放入风洞,小球进入风洞后系统自动启动,控制小球的下落不超过D点,然后维持在BC段5秒以上。(10分) (7)其他自主发挥设计。(10分) 说明 (1)题中“到达XX段”是指,小球的整体全部进入该段内; (2)题中“维持”是指,在维持过程中小球整体全部不越过该段的端线; (3)小球的位置以其中心点为准(即小球的上沿切线向下移2cm,或下沿切线向上移2cm); (4)直流风机的供电电压不得超过24V,注意防止风机叶片旋转可能造成的伤害;可在圆管及其周围设置传感器检测管内小球的位置;可将圆管、连接部与直流风机安装在硬质板或支架上,以便于使圆管保持竖直状态,并保持风洞气流通畅。
简易风洞控制系统设计
简易风洞控制系统设计 【摘要】本设计主要通过MSP430单片机控制直流风机完成简易风洞试验。风洞由圆管,连接部与直流风机构成,由单片机产生PWM控制直流风机的转速,通过红外对管阵列采集光强信息检测小球在圆管中的位置,同时由12864液晶显示小球的高度位置及维持状态的时间,从而实现小球在简易风洞中的位置控制。 【关键词】风洞;MSP430;控制系统 1.引言 风洞,是指在一个管道内,用动力设备驱动一股速度可控的气流,用以对模型进行空气动力实验的一种设备。最常见的是低速风洞。但由于风洞造价过高,导致对气流研究成本偏高。所以本次设计为一个简单的风洞,可以在导管中研究小球漂浮时气流对它的影响。 2.总体设计方案 本系统主要由主控板模块、测距模块、显示模块、电机驱动模块、电源模块组成,系统方框图如图1所示。图中MSP430控制器模块为系统的核心部件,按键和液晶显示器用来实现人机交互功能,其中通过键盘将需要设置的参数和状态输入到单片机中,并通过控制器显示到液晶屏上。在运行过程中控制器产生PWM 脉冲送到风机驱动电路中,控制直流电机转速,同时控制器经过数字PID运算后改变PWM脉冲的占空比,实现电机转速达到实时、准确控制的目的。 图1 系统总体框图 3.硬件设计 3.1 微控制器电路设计 MSP430是一个超低功耗的16位单片机,它处理速度快、运算能力强、功耗低、片内资源丰富、开发方便。其最小系统如图2所示。 3.2 传感器电路设计 传感器部分采用红外对管进行小球位置点信息的采集。红外分为两个部分,一个部分为发射,另外一部分为接收,每当小球穿过红外的时候,电路会给主控芯片送入低电平,从而达到判断小球位置的目的。电路图如图4所示。 图2 MSP430单片机最小系统电路原理图 图3 红外测距模块电路原理图
超声波风速风向仪设计
超声波风速风向仪设计 1.研究背景及意义 风速测量在工业生产和科学实验中都有广泛的应用,尤其在气象领域,风速测量更有着重要的价值。风速测量,常用的仪表有杯状风速计、翼状风速计、热敏风速计和超声波风速计。杯状风速计和翼状风速计使用方便,但其惰性和机械摩擦阻力较大,只适合于测定较大的风速。热敏风速计利用热敏探头,其工作原理是基于冷冲击气体带走热元件上的热量,借助一个调节开元器件保持温度恒定,此时调节电流和流速成正比。这种测量方法需要人为的干预,而且此仪表在湍流中使用时,来自各个方向的气流同时冲击热元件,会影响到测量结果的准确性。现阶段常采用基于超声波传播速度受风速影响因而增减原理制成的超声波风速仪表,与其它各类仪表相比较,其优势在于:安装简单,维护方便;不需要考虑机械磨损,精度较高;不需要人为的参与,可完全智能化。 2.国内外研究历史及发展状况 超声波可用于测量,是因为在超声波在传播过程中,会加载流体的流速信息,这些信息经过分离处理,便可以得到流体的流速。70年代中后期,大规模集成电路技术的飞速发展,高精度的时间测量成为一件轻而易举的事情,再加上高性能的、动作非常稳定的PLL(锁相环路)技术的应用,使得超声波流量计的稳定可靠性得到了初步的保证。同时为了消除声速变化对测量精度的影响,出现了频差法、锁相频差法等。该类方法测量周期短,响应速度快,而且几乎完全消除了声速对测量精度的影响。80年代,超声波测量出现了新的方法,比如射束位移法、多普勒法和相关噪声法等等。90年代才真正实现了高精度超声波气体流量计。 从国内、外超声波气体测量发展来看,国外机构开展这项工作的时间较早,到现在为止已经形成较为成熟的产品。当今世界,超声波流量计用于气体流量计的研究与开发方面,荷兰的工nstromet公司、英国的Dnaiel公司以及美国的Cnotrolotmo公司均做出了大量的工作并取得了较好的应用效果,其销售份额也排在前几位。日本在超声波气体流量计的设计方面也具有很大的优势,在消除管外传播时间、提高仪器精度和缩短响应时间方面有独到之处。我国的超声波流量
简易风洞
共1页,G-1 2014年陕西省TI 杯大学生电子设计竞赛题 G 题:简易风洞及控制系统(高职) 1. 任务 设计制作一简易风洞及其控制系统。风洞由圆管、连接部与直 流风机构成,如右所示。圆管竖直放置,长度约40cm ,内径大于 4cm 且内壁平滑,小球(直径4cm 黄色乒乓球)可在其中上下运动; 管体外壁应有A 、B 、C 、D 等长标志线,BC 段有1cm 间隔的短标 志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管 的气密性连接,圆管底部应有防止小球落入连接部的格栅。控制系 统通过调节风机的转速,实现小球在风洞中的位置控制。 2. 要求 (1) 小球置于圆管底部,启动后5秒内控制小球向上到达BC 段,并维持5秒以上。(20分) (2) 当小球维持在BC 段时,用长形纸板(宽度为风机直径的 三分之一)遮挡风机的进风口,小球继续维持在BC 段。(10分) (3) 以C 点的坐标为0cm 、B 点的坐标为10cm ;用键盘设定小球的高度位置(单 位:cm ),启动后使小球稳定地处于指定的高度3秒以上,上下波动不超过±1cm 。(10分) (4) 以适当的方式实时显示小球的高度位置及小球维持状态的计时。(10分) (5) 小球置于圆管底部,启动后5秒内控制小球向上到达圆管顶部处A 端,且不跳 离,维持5秒以上。(10分) (6) 小球置于圆管底部,启动后30秒内控制小球完成如下运动:向上到达AB 段 并维持3~5秒,再向下到达CD 段并维持3~5;再向上到达AB 段并维持3~5,再向下到达CD 段并维持3~5;再向上冲出圆管(可以落到管外)。(20分) (7) 风机停止时用手将小球从A 端放入风洞,小球进入风洞后系统自动启动,控制 小球的下落不超过D 点,然后维持在BC 段5秒以上。(10分) (8) 其他自主发挥设计。(10分) (9) 设计报告。(20分) 项 目 主要内容 分数 系统方案 方案比较,方案描述 5 设计与论证 风洞控制实现方法 电路设计及参数计算 8 测试 测试方法与测试结果 5 设计报告结构及规范性 摘要,正文结构完整性、内容规范性 2 小计 20
风洞概论及设计
《流体力学试验技术》 课程设计 班级:0109108 学号:010910811 姓名:周士杰 指导教师:史志伟 南京航空航天大学空气动力学系 2012年12月
一、目的要求 综合运用所学课程知识,完成简化了的低速风洞气动外型概念设计,达到培养和提高独立完成设计工作的能力。 二、完成设计任务的条件 (1)风洞试验段要求:闭口 (2)实验段进口截面形状:矩形 (3)实验段进口截面尺寸:2.5mX3.0m (4)试验段进口截面最大风速:100m/s (5)收缩段的收缩比:7 三、完成的任务 (1)低速风洞设计图纸绘制 (2)设计说明书 (3)风洞设计、研制与实验技术研究方面的综述报告 四、完成时间 2012年12月24日~2013年1月4日 五、参考文献 《风洞设计原理》、《低速风洞实验》:查找风洞实验技术相关文献资料。 指导老师:史志伟
① 为了使模型处于实验段的均匀流场之中,模型头部至实验段入口应保持一定的距离,以1l 表示。1l 的大小视实验段入口流场的均匀程度而定。如实验段直径为0D ,则1l 大致为0.25~0.500D 。因为后面我们会采用较多层的紊流网,故此处不用取得太大,选择100.35l D =。 ② 模型的长度为2l 表示,大约在0.75~1.250D 之间,各类飞机的模型是不相同的。为了使风洞尽量满足一洞多用,取2l 足够长选择201.25l D =。 ③ 模型尾部至扩压段进口也应保持一定距离,以3l 表示,一方面是保证模型的尾流不过多影响扩压段的工作效率,另一方面也不使扩压段的流动影响模型尾部。这个距离大约为0.75~1.250D 。选择300.8l D = ④ 所以12302.4 6.55L l l l D m =++==,满足统计数据中,主要实验低速飞机02.0~2.5L D =的情况。其中0D 为水力直径。 04S D C = ⑤ 由于本组的风洞实验段截面为矩形形状,而对于矩形实验段,可以采用的一种解决附面层影响的方法就是沿轴线逐渐减小切面的截角。此处我们参考NH-2风洞模型。这样做使位流截面保持不变,可以消除纵向静压梯度。
超声波风速风向仪设计
超声波风速风向仪设计
超声波风速风向仪设计 1.研究背景及意义 风速测量在工业生产和科学实验中都有广泛的应用,尤其在气象领域,风速测量更有着重要的价值。风速测量,常用的仪表有杯状风速计、翼状风速计、热敏风速计和超声波风速计。杯状风速计和翼状风速计使用方便,但其惰性和机械摩擦阻力较大,只适合于测定较大的风速。热敏风速计利用热敏探头,其工作原理是基于冷冲击气体带走热元件上的热量,借助一个调节开元器件保持温度恒定,此时调节电流和流速成正比。这种测量方法需要人为的干预,而且此仪表在湍流中使用时,来自各个方向的气流同时冲击热元件,会影响到测量结果的准确性。现阶段常采用基于超声波传播速度受风速影响因而增减原理制成的超声波风速仪表,与其它各类仪表相比较,其优势在于:安装简单,维护方便;不需要考虑机械磨损,精度较高;不需要人为的参与,可完全智能化。 2.国内外研究历史及发展状况 超声波可用于测量,是因为在超声波在传播过程中,会加载流体的流速信息,这些信息经过分离处理,便可以得到流体的流速。70年代中后期,大规模集成电路技术的飞速发展,高精度的时间测量成为一件轻而易举的事情,再加上高性能的、动作非常稳定的PLL(锁相环路)技术的应用,使得超声波流量计的稳定可靠性得到了初步的保证。同时为了消除声速变化对测量精度的影响,出现了频差法、锁相频差法等。该类方法测量周期短,响应速度快,而且几乎完全消除了声速对测量精度的影响。80年代,超声波测量出现了新的方法,比如射束位移法、多普勒法和相关噪声法等等。90年代才真正实现了高精度超声波气体流量计。 从国内、外超声波气体测量发展来看,国外机构开展这项工作的时间较早,到现在为止已经形成较为成熟的产品。当今世界,超声波流量计用于气体流量计的研究与开发方面,荷兰的工nstromet公司、英国的Dnaiel公司以及美国的Cnotrolotmo公司均做出了大量的工作并取得了较好的应用效果,其销售份额也排在前几位。日本在超声波气体流量计的设计方面也具有很大的优势,在消除管外传播时间、提高仪器精度和缩短响应时间方面有独到之处。我国的超
风洞试验
风洞实验 科技名词定义 中文名称:风洞实验 英文名称:wind tunnel testing 定义:在风洞中进行模拟飞行器在大气中运动时的空气动力学现象。 应用学科:航空科技(一级学科);飞行原理(二级学科) 本内容由全国科学技术名词审定委员会审定公布 流体力学方面的风洞实验指在风洞中安置飞行器或其他物体模型,研究气体流动及其与模型的相互作用,以了解实际飞行器或其他物体的空气动力学特性的一种空气动力实验方法;而在昆虫化学生态学方面则是在一个有流通空气的矩形空间中,观察活体虫子对气味物质的行为反应的实验。 目录
编辑本段原理 风洞实验的基本原理是相对性原理和相似性原理。根据相对性原理,飞机在静止 风洞实验 空气中飞行所受到的空气动力,与飞机静止不动、空气以同样的速度反方向吹来,两者的作用是一样的。但飞机迎风面积比较大,如机翼翼展小的几米、十几米,大的几十米(波音747是60米),使迎风面积如此大的气流以相当于飞行的速度吹过来,其动力消耗将是惊人的。根据相似性原理,可以将飞机做成几何相似的小尺度模型,气流速度在一定范围内也可以低于飞行速度,其试验结果可以推算出其实飞行时作用于飞机的空气动力。[1] 编辑本段优点 风洞实验尽管有局限性,但有如下四个优点:①能比较准确地控制实验条 风洞实验 件,如气流的速度、压力、温度等;②实验在室内进行,受气候条件和时间的影响小,模型和测试仪器的安装、操作、使用比较方便;③实验项目和内容多种多样,实验结果的精确度较高;④实验比较安全,而且效率高、成本低。因此,风洞实验在空气动力学的研究、各种飞行器的研制方面,以及在工业空气动力学和其他同气流或风有关的领域中,都有广泛应用。 编辑本段要求
PIV在低速风洞中的应用
第12卷 第2期流体力学实验与测量V o l.12,N o.2 EXPER I M EN T S AND 1998年6月M EA SU R E M EN T S I N FLU I D M ECHAN I CS Jun.,1998 P IV在低速风洞中的应用Ξ 刘宝杰 王光华 高 歌 北京航空航天大学,北京 100083 袁辉靖 北京大学特赛流动测量研究中心,北京 100871 摘要 利用在线式P I V系统,采用互相关的分析方法,以较高雷诺数下圆柱绕流和翼型 尾流为例,对P I V在低速风洞实验研究中的应用作一简要介绍,旨在表明当前P I V技术的一 些特点及其用于风洞实验研究的潜力。实验中所采用的P I V系统,反映了近几年来P I V技术 的一些新特点:一体化大能量双激光器系统、T S I公司的互 自相关CCD和高速帧采集板 (F ram e Grabber)等。 关键词 在线式P I V;互相关;风洞测量;圆柱绕流;翼型尾流 中图号 V211.7;O357.5 0 引 言 P I V(粒子图像测速技术)是在流动显示技术的基础上,利用图像处理技术发展起来的一种新的流动测量技术,通过跟踪示踪粒子来判断速度的大小和方向。当前P I V作为一种可靠的整体测量技术,获得了普遍的接受。P I V技术的重要特点就是突破了空间单点测量技术的局限性,可在同一时刻记录下整个测量平面的有关信息,从而可以获得流动的瞬时平面速度场、脉动速度场、涡量场和雷诺应力分布等。因此P I V非常适于研究涡流、湍流等复杂的流动结构,这是其它单点测量技术难以或无法做到的。同时现在的P I V系统还具备了与单点测量仪器(如激光多普勒风速计LDV等)相当的空间分辨率。因此即使仅限于二维测量,P I V也是一种先进的研究复杂流动的定量工具。此外,三维P I V技术在近几年内也获得了较大的发展,期望在不久的将来能应用于实际流动测量。 风洞是流体力学研究的基本手段,一直受到了较高重视。风洞的测量方法随着测试技术的飞速发展,也一直在不断地完善之中。由于P I V技术的上述发展,将P I V直接应用于风洞等大型实验设备的研究,在国际已经得到了普遍的认可,实际应用的例子越来越多。 本实验是利用在线式P I V系统,以低速风洞中的圆柱绕流和翼型尾流为例,对P I V 在低速风洞实验研究中的应用作一简要介绍,旨在表明当前P I V技术的一些特点,及其应用于风洞这类大型实验设备研究的潜力。本实验中所采用的P I V系统的配置,基本上体现了近几年发展并成熟起来的P I V系统的一些特点:如一体化大能量的双激光器系统 Ξ:19971006
风洞综述(实验流体力学课程设计)
实验空气动力学课程设计(风洞综述) .概念及原理 风洞(wind tunnel ),是能人工产生和控制气流,以模拟飞行器或物体周围气体的流动,并可量度气流对物体的作用以及观察物理现象的一种管道状实验设备,它是空气动力学实验最常用、最有效的工具。它不仅在航空和航天工程的研究和发展中起着重要作用在交通运输、房屋建筑、风能利用和环境保护等部门中也得到越来越广泛的应用。 原理: 用风洞作实验的依据是运动的相对性原理。为确保实验准确模拟真实流场,还必须满足相似律的要求。但由于风洞尺寸和动力的限制,通常只能选择一些影响最大的参数进行模拟。此外,风洞实验段的流场品质,如气流速度分布均匀度、平均气流方向偏离风洞轴线的大小、沿风洞轴线方向的压力梯度、截面温度分布的均匀度、气流的湍流度和噪声级等必须符合一定的标准,并定期进行检查测定。 .风洞发展简要回顾 风洞设备的发展大致经历了低速风洞发展阶段、超声速风洞发展阶段、跨声速风洞发展阶段、高超声速风洞发展阶段、风洞设备更新 改造和稳定发展阶段、风洞设备发展适应新需求、探索新概念风洞发展阶段。20世纪90年代,随着经济全球化和型号发展数量的减少,一方面,风洞设备在数量上呈现出过剩状态;另一方面,又缺少能满足未来型号精细化发展要求的高性能风洞。 三.近期风洞改造和建设 工业生产型风洞的更新改造最主要特点是风洞设计的多功能性、可扩展性、技术的先进性,风洞建设也呈现出创新的特点。主要包括:吸收试验段内的大部 分噪声, 提高风洞试验Re或模拟能力等。另外还有:感应热等离子体风洞(通
过高频电发生器以感应偶合的方式将亚声速或超声速射流加热到极高温度(5000C?10000C),这种等离子风洞主要用于防热研究) 四.风洞发展的未来趋势 1)“安静”气流风洞 不仅气动声学风洞需要“安静”的风洞,高品质的任何类型风洞都 需要“安静”的风洞。 2)亚声速高升力飞行风洞风洞Re模拟能力直接影响试验数据的准确性。经过多年论证研究, NAS提出了高升力飞行风洞(HiLiFT )的概念。它是利用磁悬浮推进技术推动试验模型在含有静止气体介质(空气或氮气)的管道中运动,