哈工大无人机实验报告
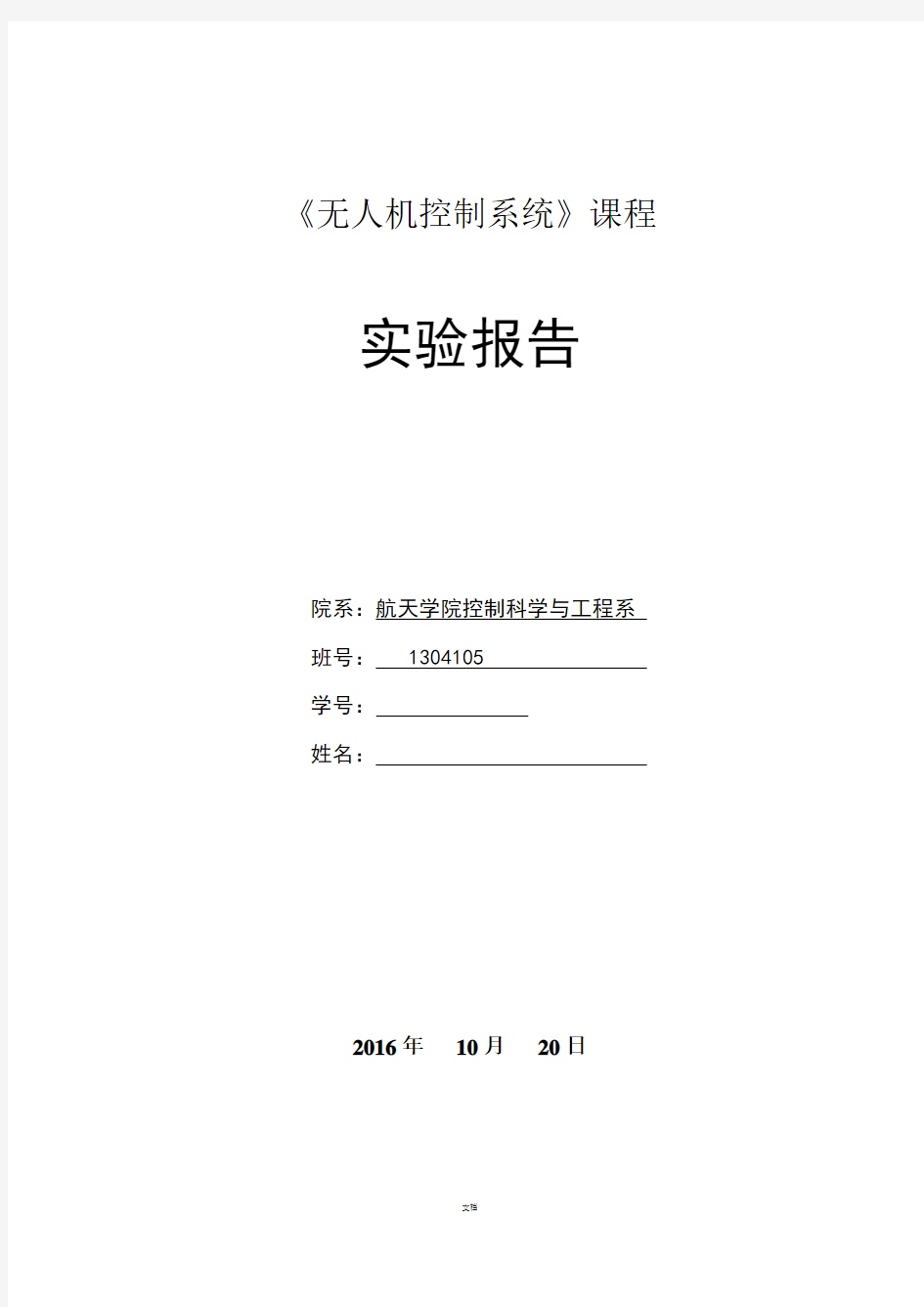
《无人机控制系统》课程实验报告
院系:航天学院控制科学与工程系
班号: 1304105 学号:
姓名:
2016年10月20日
审阅教师: 实验成绩:
一、实验目的
1、了解无人机控制系统的设计方法;
2、掌握并熟悉MATLAB 仿真工具的使用方法;
3、掌握并熟悉SIMULINK 仿真工具的使用方法。 二、实验内容
1、试验对象:无人机俯仰角控制系统设计
2、参数:? 无人机舵系统传递函数为:
()0.1
()0.11
e c s s s δδ=+ ? 升降舵偏角与姿态角之间的传递函数为: 2()3
()25
e s s s s θδ=++ 3、要求:
? 画出系统根轨迹图;
? 分别用根轨迹法和增益调试的方法求出系统最大增益; ? 利用Simulink 对系统进行仿真和参数调试,并给出最终控制器 及控制效果图。 三、实验步骤 1、画出系统根轨迹图 系统的传递函数
23()
()()(25)(10)
p c k s G s s s s s θδ==
+++,
在MATLAB 中输入以下指令 num=3;
>> den=conv([1 2 5],[1 10]); >> rlocus(num,den) 画出根轨迹图如下:
Root Locus
Real Axis
I m a g i n a r y A x i s
-25-20-15-10-50510152025
2、确定最大增益
图中根轨迹与虚轴交点的Kp 对应最大增益,此时系统临界稳定,Kp=
250
3
,此时系统的传递函数为 2()250
()()(25)(10)
c s G s s s s s θδ==+++ 系统开环放大倍数为5。
接下来用增益调试法确定最大增益。 系统的传递函数为2
3()
()()(25)(10)
p c k s G s s s s s θδ=
=+++
当20p k =时,系统单位阶跃响应收敛。单位阶跃响应如下图所示。
0.10.20.30.40.50.6
0.70.80.9Step Response
Time (sec)
A m p l i t u d e
当120p k =时,系统单位阶跃响应发散。单位阶跃响应如下图所示。
020
406080100120140160180200
-8
-6
-4
-2
2
4
6
8
x 10
25
Step Response
Time (sec)
A m p l i t u d e
当250
3
p k =时,系统单位阶跃响应临界稳定。单位阶跃响应如下图所示。
0510
152025
0.20.40.60.811.2
1.41.6
1.8Step Response
Time (sec)
A m p l i t u d e
由此可见,
250
3p k =
为最大增益。
3、利用Simulink 设计控制器 当系统调至最大增益
250
3p k =
时,系统出现等幅振荡。由
系统的根轨迹图可知,系统需要一个位于左半平面的零点,且需在实 轴极点之前,这样系统的两个共轭复根会被零点拽回 LHP ,从而系统不会出现发散现象。
由上分析,我们选择 PD 控制器,它可以给系统提供一个 LHP 零点。
画出Simulink模拟图如下图所示。
250
s +12s +25s+50
32
Transfer Fcn
Step Scope
1
Gain1
1
Gain
du/dt
Derivative
系统阶跃响应如下:
可见系统存在较大稳态误差,需再加积分控制器。故重新搭建系统控制器如下:
250
s +12s +25s+50
32
Transfer Fcn
Step Scope
1
s
Integrator
1
Gain2
1
Gain1
5
Gain
du/dt
Derivative
系统阶跃响应如下
可见增加积分控制器后系统稳态误差消除。此时系统超调量为8%,调整时间为2s, 性能较好。
此时控制器传递函数为
251
()c s s G s s
++=
四、实验结论
无人机舵系统的传递函数为 2
3()
()()(25)(10)
p c k s G s s s s s θδ=
=+++ 通过选取适当的 PID 控制器,系统可以有很不错的动态性能。分别用根轨迹法和增益调试的方法求出系统最大增益为
250
3p k =
。然
后通过Simulink 仿真确定PID 控制器参数为5,1,1p i d k k k ===。
因此,控制器传递函数为
251
()c s s G s s
++=
此时,系统超调量为8%,调整时间为2s, 无稳态误差,系统性能较好。
哈工大单片机实验报告(上传)
H a r b i n I n s t i t u t e o f T e c h n o l o g y 单片机原理与应用 实验报告 学生姓名: 学号: 班级: 专业: 任课教师: 所在单位: 2013年5月
软件实验 在软件实验部分,通过实验程序的调试,使学生熟悉MCS-51的指令系统,了解程序设计过程,掌握汇编语言设计方法以及如何使用实验系统提供的调试手段来排除程序错误。 实验一清零程序 一、实验目的 掌握汇编语言设计和调试方法,熟悉键盘操作。 二、实验内容 把2000~20FFh的内容清零。 三、程序框图 四、实验过程 实验中利用MOVX语句,将外部存储器指定内容清零。利用数据指针DPTR完成数据传送工作。程序采用用循环结构完成,R0移动单元的个数,可用CJNE比较语句判断循环是否结束。 五、实验结果及分析 清零前清零后
【问题回答】清零前2000H~20FFH中为内存里的随机数,清零后全变为0。 六、实验源程序 AJMP MAIN ORG 0640H MAIN: MOV R0, #00H MOV DPL, #00H MOV DPH, #20H LOOP: MOV A, #00H MOVX @DPTR, A INC DPTR INC R0 CJNE R0, #0FFH, LOOP MOVX @DPTR, A END 实验二拆字程序 一、实验目的 掌握汇编语言设计和调试方法。 二、实验内容 把2000h的内容拆开,高位送2001h低位,低位送2002h低位,2001h、2002h高位清零,一般本程序用于把数据送显示缓冲区时用。 三、程序框图 四、实验过程 将寄存器中内容送入2000H,分别将高低四位移到低位,将高四位置零然后移入2001H 和2002H中。利用MOVX语句、DPTR指针可实现数据的传送,利用高低四位交换语句SWAP和与语句ANL可进行对高低位的清零。
数据库实验3答案
实验三:交互式SQL语句的使用 1、实验目的 (1)掌握数据库对象的操作过程,包括创建、修改、删除 (2)熟悉表的各种操作,包括插入、修改、删除、查询 (3)熟练掌握常用SQL语句的基本语法 2、实验平台 使用SQL Server提供的Microsoft SQL Server Management Studio工具,交互式使用SQL语句。 3 实验容及要求 选择如下一个应用背景之一: ●学生选课系统 ●习题3、4、和5中使用的数据库 ●其它你熟悉的应用 (1)建立一个数据库和相关的表、索引、视图等数据库对象,练习对表、索引和视图的各种操作。 (2)要求认真进行实验,记录各实验用例及执行结果。 (3)深入了解各个操作的功能。 实验要求包括如下方面的容: 3.1 数据定义 1.基本表的创建、修改及删除 2.索引的创建 3.视图的创建 3.2 数据操作 完成各类更新操作包括: 1.插入数据
2.修改数据 3. 删除数据 3.3 数据查询操作 完成各类查询操作 1.单表查询 2.分组统计 3. 连接查询 4. 嵌套查询 5. 集合查询 3.4 数据操作 1.创建视图 2.视图查询 参考示例: 建立一个学生选课数据库,练习对表、视图和索引等数据库对象的各种操作。 一、数据定义 创建学生选课数据库ST,包括三个基本表,其中Student表保存学生基本信息,Course表保存课程信息,SC表保存学生选课信息,其结构如下表: 表1. Student表结构 表2. Course表结构
表3. SC表结构 1.创建、修改及删除基本表 (1)创建Student表 CREATE TABLE Student (Sno CHAR(8)PRIMARY KEY, Sname CHAR(8), Ssex CHAR(2)NOT NULL, Sage INT, Sdept CHAR(20) ); (2)创建Course表 CREATE TABLE Course (Cno CHAR(4)PRIMARY KEY, Cname CHAR(40)NOT NULL, Cpno CHAR(4), Ccredit SMALLINT, ); (3)创建SC表 CREATE TABLE SC (Sno CHAR(8)FOREIGN KEY (Sno)REFERENCES Student(Sno), Cno CHAR(4), Grade SMALLINT, ); (4)创建员工表Employee
网络攻防实验报告
实验报告模板
【实验目的】(简要描述实验目的) 采用免杀、混淆等技术的恶意代码有可能突破安全软件的防护而运行在目标主机中。即使用户感受到系统出现异常,但是仅仅通过杀毒软件等也无法检测与根除恶意代码,此时需要用户凭借其它系统工具和对操作系统的了解对恶意代码手工查杀。本实验假设在已经确定木马进程的前提下,要求学生借助进程检测和注册表检测等系统工具,终止木马进程运行,消除木马程序造成的影响,从而实现手工查杀恶意代码的过程。 【实验结果及分析】(需要有结果截图) 一、恶意代码手工查杀实验 1、虚拟机快照 为防止虚拟机破坏后无法恢复,应先将干净的虚拟机进行快照设置。点击菜单“虚拟机”“快照”“拍摄快照”,创建一个干净的虚拟机快照。 2.创建被感染的系统环境 由于恶意代码采用了免杀技术,因此能够成功绕过防病毒等安全软件检测,等用户感到系统异常时,通常恶意代码已经在主机系统内加载运行。为了尽量模拟一个逼真的用户环境,我们在搭建好的虚拟机中运行木马宿主程序 “radar0.exe”。运行完后,可以看见,“radar0.exe”自动删除。
3.木马进程的定位 用户对系统的熟悉程度决定了发现系统异常继而查找恶意代码的早晚。在本例中,明显可以感受到系统运行速度变慢,打开任务管理器,可以观察到有一个“陌生”的进程(非系统进程或安装软件进程)“wdfmgr.exe”占用CPU比率很高。 为了确定该进程为木马进程,可以通过查找该进程的静态属性如创建时间、
开发公司、大小等,以及通过对该进程强制终止是否重启等现象综合判断。在本例中,“Wdfmgr.exe”为木马radar.exe运行后新派生的木马进程。 4.记录程序行为 打开工具“ProcMon.exe”,为其新增过滤规则“Process Name”“is”“wdfmgr.exe”,然后开始监控。点击“Add”将过滤规则加入,可以看到ProcMon开始监控“wdfmgr.exe”进程的行为。需要注意的是,有时为了保证观察到的行为完备性,会先启动ProcMon工具,然后再启动被监控进程。 为了分别观察该进程对文件系统和注册表的操作,点击菜单 “Tools”“File Summary”,观察对文件系统的修改。
哈工大无人机实验分析报告
哈工大无人机实验报告
————————————————————————————————作者:————————————————————————————————日期:
《无人机控制系统》课程实验报告 院系:航天学院控制科学与工程系 班号: 1304105 学号: 姓名: 2016年10月20日
审阅教师: 实验成绩: 一、实验目的 1、了解无人机控制系统的设计方法; 2、掌握并熟悉MATLAB 仿真工具的使用方法; 3、掌握并熟悉SIMULINK 仿真工具的使用方法。 二、实验内容 1、试验对象:无人机俯仰角控制系统设计 2、参数:? 无人机舵系统传递函数为: ()0.1 ()0.11 e c s s s δδ=+ ? 升降舵偏角与姿态角之间的传递函数为: 2()3 ()25 e s s s s θδ=++ 3、要求: ? 画出系统根轨迹图; ? 分别用根轨迹法和增益调试的方法求出系统最大增益; ? 利用Simulink 对系统进行仿真和参数调试,并给出最终控制器 及控制效果图。 三、实验步骤 1、画出系统根轨迹图 系统的传递函数 23() ()()(25)(10) p c k s G s s s s s θδ== +++,
在MATLAB 中输入以下指令 num=3; >> den=conv([1 2 5],[1 10]); >> rlocus(num,den) 画出根轨迹图如下: Root Locus Real Axis I m a g i n a r y A x i s -30 -25-20-15-10-50510 -25-20-15-10-50510152025 2、确定最大增益 图中根轨迹与虚轴交点的Kp 对应最大增益,此时系统临界稳定,Kp= 250 3 ,此时系统的传递函数为 2()250 ()()(25)(10) c s G s s s s s θδ==+++ 系统开环放大倍数为5。 接下来用增益调试法确定最大增益。 系统的传递函数为2 3() ()()(25)(10) p c k s G s s s s s θδ= =+++
哈工大计算机网络实验报告之五
计算机网络课程实验报告 实验5:利用Ethereal分析TCP、UDP、ICMP协议 继续学习Ethereal的使用; 利用Ethereal分析TCP、UDP和ICMP协议。 TCP协议采用了哪些机制保证可靠数据传输。(3分) 数据重传和数据确认应答机制 Traceroute的工作过程,用自己的话来描述,200字以内,超过酌情扣分。 (4分) 构造数据包,来检查到达一个主机时经过了哪些路由。主机发送给目的地址的数据包的TTL是从1逐个递增的,而数据包每到达一个路由器,它的TTL值就会减1,当TTL减到0时,该数据包被取消,传回一个数据包给主机,我们就能捕获这个路由器的IP地址了。如果收到"超时错",表示刚刚到达的是路由器,而如果收到的是"端口不可达" 错误,表示刚刚到达的就是目的主机,路由跟踪完成,程序结束。 阐述一下为什么应用程序开发者会选择将应用程序运行在UDP而不是TCP 之上?(3分) UDP没有拥塞控制机制,发送方可以以任何速率向下层注入数据。很多实时应用是
可以容忍一定的数据丢失的,同时又对速率有很高要求(比如在线视频播放),这时开发者会倾向选择UDP协议,避免使用TCP协议的拥塞控制机制产生的分组开销。 实验过程: 使用Ethereal分析TCP协议: (15分)得分:抓取本机与https://www.360docs.net/doc/d610675898.html,/ethereal-labs/alice.txt通信过程中的网络数据包。根据操作思考以下问题: 客户服务器之间用于初始化TCP连接的TCP SYN报文段的序号(sequence number)是多少?在该报文段中,是用什么来标示该报文段是SYN报文段的? Seq=0 Flags中的syn位为1,ack位为0,说明是syn报文段 服务器向客户端发送的SYNACK报文段序号是多少?该报文段中,Acknowledgement字段的值是多少?https://www.360docs.net/doc/d610675898.html,服务器是如何决定此值 的?在该报文段中,是用什么来标示该报文段是SYNACK报文段的? Seq=0 Ack=1,服务器根据客户端发送的SYN报文的Seq值加一后得到此值 Flags中的Ack和Syn位都为1,所以是SYNACK报文
数据库实验三
实验三订购数据库 (一)数据定义 一、基本表操作 1.建立基本表 1)创建仓库表,由以下属性组成:仓库号(CHAR 型),城市(CHAR 型),面积(INT 型)。其中仓库号为主码,并且有面积>0 的限定条件 2)创建职工表,由以下属性组成:仓库号(CHAR型),职工号(CHAR型),工资(INT型)。其中职工号为主码,仓库号为外码,工资的限定条件为1000<=工资<=5000。 3)创建供应商表,由以下属性组成:供应商号(CHAR型),供应商名(CHAR型),地址(CHAR 型)。其中供应商号为主码。 4)创建订购单表,由以下属性组成:职工号(CHAR型),供应商号(CHAR型),订购单号(CHAR 型),订购日期(CHAR型)。其中订购单号为主码,职工号和供应商号为外码。 2.修改基本表 1)往订购单表中增加一个新的属性“完成日期”,DATETIME型,并且允许为空值。 2)将职工表中的工资属性类型改为SMALLINT 型。 3)删除刚才在订购单表中加入的“完成日期”属性。 二、索引操作 1.建立索引 1)在订购单表上建立关于供应商号的普通索引supidx。 2)在订购单表的多个字段建立索引sup_empidx,先按照供应商号升序索引,然后按照职工号升序索引。 2.删除索引 1)删除订购单表上的索引supidx。 2)删除订购单表上的索引sup_empidx。 (二)数据操作 一、插入数据 1)向仓库表插入下列数据:WH1,北京,370 WH2,上海,500 WH3,广州,200 WH4,武汉,400 2)向职工表插入下列数据:WH2,E1,1220 WH4,E2,1270 WH1,E3,1210 WH2,E4,1250 WH3,E5,1200 WH3,E6,1230 WH1,E7,1250 3)向供应商表插入下列数据: S1,利民电子元件厂,上海 S2,联华电子公司,武汉 S3,振华电子厂,西安
网络防御实验报告
网络防御实验报告 学院计算机学院 专业网络工程 班级1班 姓名刘小芳 学号41009040127 - 2013年12月30日
一.实验题目 网络防御实验 二.实验环境 PC 机一台; 操作系统:win7 物理地址:EO-E9-A5-81-A5-1D IP地址:192.168.1.102 三.实验目的 掌握有关网络防御的基本原理和方法; 四.常见网络防御方法 10.1物理层 10.2网络层 路由交换策略 VLAN划分 防火墙、隔离网闸 入侵检测 抗拒绝服务 传输加密 10.3系统层 漏洞扫描 系统安全加固 10.4应用层 防病毒 安全功能增强 10.5管理层 独立的管理队伍 统一的管理策略 五、实验方法概述 前面设计了网络攻击实验,现在在前面的基础上完成网络攻击的防御,主要模仿现在常用的网络防御手段,如防火墙等。 六.概述: 1.恶意代码及黑客攻击手段的三大特点: 传播速度惊人:“大型推土机”技术(Mass rooter),是新一代规模性恶意代码具备的显著功能。 这些恶意代码不仅能实现自我复制,还能自动攻击内外网上的其它主机,并以受害者为攻击源继续攻击其它网络和主机。 以这些代码设计的多线程和繁殖速度,一个新蠕虫在一夜之间就可以传播到互联网的各个角落。
2.受害面惊人:许多国家的能源、交通、金融、化工、军事、科技和政府部门等关键领域的信息化程度逐年提高,这些领域的用户单位的计算机网络,直接或间接地与Internet有所联系。 各种病毒、蠕虫等恶意代码,和各种黑客攻击,通过Internet为主线,对全球各行业的计算机网络用户都造成了严重的影响。 3穿透深度:蠕虫和黑客越来越不满足于攻击在线的网站,各种致力于突破各种边界防线的攻击方式层出不穷。 一个新的攻击手段,第一批受害对象是那些24小时在线的网站主机和各种网络的边界主机; 第二批受害对象是与Internet联网的,经常收发邮件的个人用户; 第三批受害对象是OA网或其它二线内网的工作站; 终极的受害对象可能会波及到生产网络和关键资产主机。 4.网络攻击的动机 偷取国家机密 商业竞争行为 内部员工对单位的不满 对企业核心机密的企望 网络接入帐号、信用卡号等金钱利益的诱惑 利用攻击网络站点而出名 对网络安全技术的挑战 对网络的好奇心 5.攻击的过程 预攻击攻击后攻击
四旋翼飞行器实验报告
实验报告 课程名称:《机械原理课内实验》 学生姓名:徐学腾 学生学号:1416010122 所在学院:海洋信息工程学院 专业:机械设计制造及其自动化 报导教师:宫文峰 2016年6 月26 日
实验一四旋翼飞行器实验 一、实验目的 1.通过对四旋翼无人机结构的分析,了解四旋翼无人机的基本结构、工作的原理和传动控制系统; 2. 练习采用手机控制终端来控制无人机飞行,并了解无人机飞行大赛的相关内容,及程序开发变为智能飞行无人机。 二、实验设备和工具 1. Parrot公司AR.Drone 2.0四旋翼飞行器一架; 2. 苹果手机一部; 3. 蓝牙数据传输设备一套。 4. 自备铅笔、橡皮、草稿纸。 三、实验内容 1、了解四旋翼无人机的基本结构; 2、了解四旋翼无人机的传动控制路线; 3、掌握四旋翼无人机的飞行控制的基本操作; 4、了解四旋翼无人机翻转动作的机理; 5、能根据指令控制无人机完成特定操作。 四、实验步骤 1、学生自行用IPHONE手机下载并安装AR.FreeFlight四旋翼飞行器控制软件。 2、检查飞行器结构是否完好无损; 3、安装电沲并装好安全罩; 4、连接WIFI,打开手机AR.FreeFlight软件,进入控制界面; 5、软件启动,设备连通,即可飞行。 6、启动和停止由TAKE OFF 控制。 五、注意事项 1.飞行器在同一时间只能由一部手机终端进行控制; 2. 飞行之前,要检查螺旋浆处是否有障碍物干涉; 3. 飞行之后禁止用手去接飞行器,以免螺旋浆损伤手部; 4. 电量不足时,不可强制启动飞行; 5. 翻转特技飞行时,要注意飞行器距地面高度大于4米以上; 6. 飞行器不得触水; 7. 飞行器最大续航时间10分钟。
北邮大数据库实验三
实验三完整性及视图、索引 视图是基于某个查询结果的一个虚拟表,只是用来查看数据的窗口而已。索引能够提供一种以一列或多列的值为基础迅速查找数据表(或视图)中行的能力,用来快速访问数据表(或视图)中的数据。触发器是一种特殊的存储过程,它在特定语言事件发生时自动执行,通常用于实现强制业务规则和数据完整性。 【实验目的】 掌握MySQL视图、索引的使用,理解什么是数据库的完整性。 【实验要求】 1、每完成一个任务,截取全屏幕快照1~3作为中间步骤和结果的贴图,粘贴在最后的实验报告中。 2、除了使用我们提供的数据外还要自己向表中添加些新数据,以保证每个查询结果不为空集,或计数结果不为0。 3、思考题可以选做,作为优秀加分的依据。 【实验任务】 1、创建一个视图,该视图为每门课程的平均成绩,视图包括的列有课程号 及平均成绩,并用利用该视图查询所有课程的平均成绩,要求给出课程号、课程名及平均成绩。
2、创建一个视图,该视图为每门课程的平均成绩,视图包括的列有课程号、 课程名及平均成绩,并用利用该视图查询所有课程的平均成绩,要求给出课程号、课程名及平均成绩。
3、为院系代码表(dept_code)创建基于“院系代码”列的索引。 4、为教室信息表(classroom_info)创建基于room_id列的惟一索引并插入一 条room_id列与表中已有的值重复的数据,观察系统的反馈。
5、重新修改表stud_info、lesson_info及stud_grade,修改的容为: ①为三表增加主码约束,stud_info的主码为stud_id,lesson_info的主码为 course_id,stud_grade的主码为stud_id、course_id。
实验1-木马病毒攻防
南昌航空大学实验报告 二〇一三年十一月八日 课程名称:信息安全实验名称:实验1木马攻击与防范 班级:xxx 姓名:xxx 同组人: 指导教师评定:签名: 一、实验目的 通过对木马的练习,使读者理解和掌握木马传播和运行的机制;通过手动删除木马,掌握检查木马和删除木马的技巧,学会防御木马的相关知识,加深对木马的安全防范意识。 二、实验原理 木马的全称为特洛伊木马,源自古希腊神话。木马是隐藏在正常程序中的具有特殊功能的恶意代码,是具备破坏、删除和修改文件、发送密码、记录键盘、实施DOS攻击甚至完全控制计算机等特殊功能的后门程序。它隐藏在目标计算机里,可以随计算机自动启动并在某一端口监听来自控制端的控制信息。 1.木马的特性 木马程序为了实现其特殊功能,一般应该具有以下性质: (1)伪装性(2)隐藏性(3)破坏性(4)窃密性 2.木马的入侵途径 木马入侵的主要途径是通过一定的欺骗方法,如更改图标、把木马文件与普通文件合并,欺骗被攻击者下载并执行做了手脚的木马程序,就会把木马安装到被攻击者的计算机中。木马也可以通过Script、ActiveX及ASP、CGI交互脚本的方式入侵,攻击者可以利用浏览器的漏洞诱导上网者单击网页,这样浏览器就会自动执行脚本,实现木马的下载和安装。木马还可以利用系统的一些漏洞入侵,获得控制权限,然后在被攻击的服务器上安装并运行木马。3.木马的种类 (1)按照木马的发展历程,可以分为4个阶段:第1代木马是伪装型病毒;第2代木马是网络传播型木马;第3代木马在连接方式上有了改进,利用了端口反弹技术,例如灰鸽子木马;第4代木马在进程隐藏方面做了较大改动,让木马服务器端运行时没有进程,网络操作插入到系统进程或者应用进程中完成,例如广外男生木马。 (2)按照功能分类,木马又可以分为:破坏型木马;密码发送型木马;服务型木马;DOS 攻击型木马;代理型木马;远程控制型木马。 4.木马的工作原理 下面简单介绍一下木马的传统连接技术、反弹端口技术和线程插入技术。 (1)木马的传统连接技术;C/S木马原理如图1-1所示。第1代和第2代木马都采用的是C/S连接方式,这都属于客户端主动连接方式。服务器端的远程主机开放监听端目等待外部的连接,当入侵者需要与远程主机连接时,便主动发出连接请求,从而建立连接。 (2)木马的反弹端口技术;随着防火墙技术的发展,它可以有效拦截采用传统连接方式。但防火墙对内部发起的连接请求则认为是正常连接,第3代和第4代“反弹式”木马就是利用这个缺点,其服务器端程序主动发起对外连接请求,再通过某些方式连接到木马的客户端,如图1-2和图1-3所示。
哈工大天线实验报告
Harbin Institute of Technology 天线原理实验报告 课程名称:天线原理 班级: 姓名: 学号: 同组人: 指导教师: 实验时间: 实验成绩: 注:本报告仅供参考 哈尔滨工业大学
一、实验目的 1. 掌握喇叭天线的原理。 2. 掌握天线方向图等电参数的意义。 3. 掌握天线测试方法。 二、实验原理 1. 天线电参数 (1).发射天线电参数 a.方向图:天线的辐射电磁场在固定距离上随空间角坐标分布的图形。 b.方向性系数:在相同辐射功率,相同距离情况下,天线在该方向上的辐射功率密度Smax与无方向性天线在该方向上的辐射功率密度S0之比值。 c.有效长度:在保持该天线最大辐射场强不变的条件下,假设天线上的电流均匀分布时的等效长度。 d.天线效率:表征天线将高频电流或导波能量转换为无线电波能量的有效程度。 e.天线增益:在相同输入功率、相同距离条件下,天线在最大辐射方向上的功率密度Smax与无方向性天线在该方向上的功率密度S0之比值。 f.输入阻抗:天线输入端呈现的阻抗值。 g.极化:天线的极化是指该天线在给定空间方向上远区无线电波的极化。 h.频带宽度:天线电参数保持在规定的技术要求范围内的工作频率范围。 (2).接收天线电参数:除了上述参数以外,接收天线还有一些特有的电参数:等效面积和等效噪声温度。 a.等效面积:天线的极化与来波极化匹配,且负载与天线阻抗共轭匹配的最佳状态下,天线在该方向上所接收的功率与入射电波功率密度之比。 b.等效噪声温度:描述天线向接收机输送噪声功率的参数。 2. 喇叭天线 由逐渐张开的波导构成,是一种应用广泛的微波天线。按口径形状可分为矩形喇叭天线与圆形喇叭天线等。波导终端开口原则上可构成波导辐射器,由于口径尺寸小,产生的波束过宽;另外,波导终端尺寸的突变除产生高次模外,反射较大,与波导匹配不良。为改善这种情况,可使波导尺寸加大,以便减少反射,又可在较大口径上使波束变窄。 (1).H面扇形喇叭:若保持矩形波导窄边尺寸不变,逐渐张开宽边可得H面扇
数据库实验三
注意:在粘贴截图时请保留窗口完整标题,但只需保留关键界面,多余的空白界面请删除。 一、实验课时:4 二、实验目的 (1) 掌握使用T-SQL语句创建、删除数据库的方法。 (2) 掌握使用T-SQL语句创建、修改、删除表的方法。 (3) 掌握使用T-SQL语句创建、删除数据库完整性约束条件的方法。 (4) 掌握使用T-SQL语句对表添加、修改、删除数据的方法。 (5) 掌握使用T-SQL语句创建、修改、删除、查询视图的方法。 三、实验要求 (1) 使用SQL Server 2008查询分析器。 (2) 严格依照操作步骤进行。 (3) 在本地服务器中创建和管理数据库。 四、实验环境 (1) PC机。 (2) SQL Server 2008。 五、实验内容及步骤(请特别注意实验步骤:第6项的第1小项,即“插入数据”操作必须在第4项以前执行) ??? 1.使用Transact-SQL语句创建JOBS数据库,数据库名格式为 JOBS_SunYu(即JOBS_你的中文名字拼音) CREATE Database JOBS_DengZhiPeng;
2.使用Transact-SQL语句创建JOBS数据库包含的所有表 EMPLOYEE CREATE TABLE EMPLOYEE( EMPNO SMALLINT NOT NULL, SUPNAME VARCHAR(50)NOT NULL, FORENAMES VARCHAR(50)NOT NULL, DOB DATE NOT NULL, ADDRESS VARCHAR(50)NOT NULL, TELNO CHAR(10)NOT NULL, DEPNO SMALLINT NOT NULL ); JOBHISTORY CREATE TABLE JOBHISTORY( EMPNO SMALLINT NOT NULL, POSITION VARCHAR(50)NOT NULL, STARDATE DATE NOT NULL, ENDDATE DATE NULL, SALARY INT NOT NULL ); COURSE CREATE TABLE COURSE( COURSENO SMALLINT NOT NULL, CNAME VARCHAR(50)NOT NULL, CDATE DATE NOT NULL ); DEPARTMENT CREATE TABLE DEPARTMENT( DEPNO SMALLINT NOT NULL, DNAME VARCHAR(50)NOT NULL, LOCATION VARCHAR(10)NOT NULL, HEAD SMALLINT NOT NULL ); EMPCOURSE CREATE TABLE EMPCOURSE( EMPNO SMALLINT NOT NULL,
计算机病毒实验报告
计算机病毒实验报告 ——windows病毒实验 姓名:张艳秋 学号:081300607 班级:信安0802 指导老师:韦俊银 实验日期:2011.5.27
实验内容 1.PE文件感染实验(选) 2.暴风一号病毒 3.VBS病毒产生 4.宏病毒实验(选)
PE文件感染实验 实验目的 了解pe病毒的感染过程 实验环境 硬件设备 PC机一台(建议虚拟机) 软件工具 Office Word 2007 实验步骤 一:参照病毒感染PE文件的7个步骤,记录病毒是如何感染文件(文字和截屏形式) 病毒感染文件过程(以感染文件ebookcode.exe为例): 重定位,获得所有API地址: …… 通过软件Stud_PE可查看可执行文件ebookcode.exe的结构可查看文件内容: 1.判断目标文件开始的两个字节是否为“MZ”:
2.判断PE文件标记“PE”: 3.判断感染标记,如果已被感染过则跳出继续执行宿主程序,否则继续: 4.读取IMAGE_FILE_HEADER的NumberOfSections域,获得Data Directory (数据目录)的个数,(每个数据目录信息占8个字节): 5.得到节表起始位置。(数据目录的偏移地址+数据目录占用的字节数=节表起始位置):
6.得到节表的末尾偏移(紧接其后用于写入一个新的病毒节信息)节表起始位置+节的个数*(每个节表占用的字节数28H)=节表的末尾偏移 7.开始写入节表,感染文件: 二:在掌握Stud_PE工具的基础上,比较文件感染前后有哪些变化。 感染前:
感染后: 由上两图可以看出,感染前后有4处发生了变化: 1:PE文件头中入口点: 感染病毒后ebookedit.exe程序的入口点变成了病毒文件的入口点 2:PointerToRawData域值,即该文件的偏移量发生了变化; 3:imag的大小发生了变化; 4:sections的数量发生了变化。 由.exe文件感染前后变化可知,PE病毒感染过程即在文件中添加一个新节,
无人机航空摄影测量_航空摄影测量实习报告.docx
无人机航空摄影测量_航空摄影测量实习报告 实习报告网免费发布航空摄影测量实习报告,更多航空摄影测量实习报告相关信息请访问实习报告网。 一、实习目的摄影测量与遥感实习是摄影测量学和遥感技术相应用的综合实习课。本课程的任务是通过实习掌握摄影测量的原理、影像处理方法、成图方法,掌握遥感的信息获取、图像处理、分类判读及制图的方法和作业程序。从而更系统地掌握摄影测量与遥感技术。通过实习使我们更熟练地掌握摄影测量及遥感的原理,信息获取的途径,数字处理系统和应用处理方法。进一步巩固和深化理论知识,理论与实践相结合。培养我们的应用能力和创新能力、工作认真、实事求是、吃苦耐劳、团结协作的精神,为以后从事生产实践工作打下坚实的理论与实践相结合的综合素质基础。二、实习内容1) 遥感影像图制作; 2) 相片控制测量; 3) 航空摄影测量相对立体观察与两侧; 4) 航片调绘、遥感图像属性调查; 5) 相片及卫片的判读及调绘6) 调绘片的内页整饰7) 撰写实习报告,提交成果。三、实习设备与资料1) 摄影测量与遥感书本上的理论知识。2) 通过电脑查找有关这门学科的实践应用及其它相关知识等。3) 电脑上相关的摄影测量的图片信息资料及判读方法。4) 现有的实习报告模板及大学城空间里的相关教学资料。四、实习时间与地点时间:2011年6月19日——2011年6月26日。地点:学校图书馆、教室、寝室及搜集摄影测量与遥感这门学科的资料等相关地方。五、实习过程 5.1摄影测量与遥感学的发展情景摄影测量与遥感是从摄影影像和其他非接触传感器系统获取所研究物体,主要是地球及其环境的可靠信息,并对其进行记录、量测、分析与应用表达的科学和技术。随着摄影测量发展到数字摄影测量阶段及多传感器、多分辨率、多光谱、多时段遥感影像与空间科学、电子科学、地球科学、计算机科学以及其他边缘学科的交叉渗透、相互融合,摄影测量与遥感已逐渐发展成为一门新型的地球空间信息科学。由于它的科学性、技术性、应用性、服务性以及所涉及的广泛科学技术领域,其应用已深入到经济建设、社会发展、国家安全和人民生活等各个方面。 5.2单张像片测量原理单张像片测图的基本原理是中心投影的透视变换,而摄影过程的几何反转则是立体测图的基本原理。广义来说,前一情况的基本原理也是摄影过程的几何反转。20世纪30年代以后,摄影过程的几何反转都是应用各种结构复杂的光学机械的精密仪器来实现的。50年代,开始应用数学解析的方式来实现。图1就是用光学投影方法实现摄影几何反转的示意图。图中假设两张相邻的航摄像片覆盖了同一地面AMDC,它们在左片P1上的构像为ɑ1m1d1c1,右片P2上的构像为ɑ2m2d2c2,两摄站点S1和S2间的距离为基线B。如将这两张像片装回与摄影镜箱相同的投影器内,后面用聚光器照明,就会投射出同摄影时相似的投影光束。再把这两个投影光束安置在与摄影时相同的空间方位,并使两投影中心间的距离为b(b为按测图比例尺缩小的摄影基线),此时所有的同名投影光线都应成对相交,从而得出一个地面的立体模型A"M "D "C "。这时, 用一个空间的浮游测标(可作三维运动)去量测它,就可画得地形图。 5.3航空摄影测量的内外业技术要求航测外业工作包括:①像片控制点联测。像片控制点一般是航摄前在地面上布设的标志点,也可选用像片上的明显地物点(如道路交叉点等),用普通测量方法测定其平面坐标和高程。②像片调绘。是图像判读、调查和绘注等工作的总称。在像片上通过判读,用规定的地形图符号绘注地物、地貌等要素;测绘没有影像的和新增的重要地物;注记通过调查所得的地名等。通过像片调绘所得到的像片称为调绘片。调绘工作可分为室内的、野外的和两者相结合的3种方法。③综合法测图。主要是在单张像片或像片图上用平板仪测绘等高线。航测内业工作包括:①测图控制点的加密。以前对于平坦地区一般采用辐射三角测量法,对于丘陵地和山地则采用立体测图仪建立单航线模拟的空中三角网,
防火墙实验报告 2
计算机安全实验报告 实验题目:天网防火墙windows安全设置专业/班级:计科一班 学号:110511407 姓名:李冲 指导教师:张小庆
一天网防火墙技术 1 实验题目简述 个人防火墙是防止电脑中的信息被外部侵袭的一项技术,在系统中监控、阻止任何未经授权允许的数据进入或发出到互联网及其他网络系统。个人防火墙产品如著名Symantec公司的诺顿、Network Ice公司的BlackIce Defender、McAfee公司的思科及Zone Lab的free ZoneAlarm 等,都能帮助用户的系统进行监控及管理,防止特洛伊木马、spy-ware 等病毒程序通过网络进入电脑或向外部扩散。 这些软件都能够独立运行于整个系统中或针对个别程序、项目,所以在使用时十分方便及实用。本次试验采用天网个人防火墙SkyNet FireWall进行个人防火墙简单的配置应用。 2.实验目标和意义 实验的目标是在于熟悉个人防火墙的配置与应用,以便更加保证个人电脑的网络安全,避免恶意用户以及程序的入侵。防治安全威胁对个人计算机产生的破坏。 3.实验原理和实验设备 3.1 实验原理 随着计算机技术的迅速发展,在计算机上处理的业务也由基于单机的数学运算、文件处理,基于简单连接的内部网络的内部业务处理、办公自动化等发展到基于复杂的内部网、企业外部网、全球互联网的企业级计算机处理系统和世界范围内的信息共享和业务处理。在系统处理能力提高的同时,系统的连接能力也在不断的提高。但在连接能力信息、流通能力提高的同时,
基于网络连接的安全问题也日益突出,因此计算机安全问题,应该像每家每户的防火防盗问题一样,做到防范于未然。防火墙则是一个安全策略的检查站。所有进出的信息都必须通过防火墙,防火墙便成为安全问题的检查点,使可疑的访问被拒绝于门外。 防火墙对流经它的网络通信进行扫描,这样能够过滤掉一些攻击,以免其在目标计算机上被执行。防火墙还可以关闭不使用的端口。而且它还能禁止特定端口的流出通信,封锁特洛伊木马。最后,它可以禁止来自特殊站点的访问,从而防止来自不明入侵者的所有通信。 例如,防火墙可以限制 TCP、UDP协议及TCP协议允许访问端口范围,当不符合条件时,程序将询问用户或禁止操作,这样可以防止恶意程序或木马向外发送、泄露主机信息。并且可以通过配置防火墙IP规则,监视和拦截恶意信息。与此通知,还可以利用IP规则封杀指定 TCP/UDP端口,有效地防御入侵,如139漏洞、震荡波等。 3.1 实验设备 Window 7 天网个人防火墙2010版 4.实验步骤 4.1 实验步骤 第一步:局域网地址设置,防火墙将会以这个地址来区分局域网或者是INTERNET的IP来源。设置如图3-1.
四旋翼无人机建模及其PID控制律设计
四旋翼无人机建模及其PID控制律设计 时间:2012-10-27 来源:现代电子技术作者:吴成富,刘小齐,袁旭 关键字:PID无人机建模 摘要:文中对四旋翼无人机进行建模与控制。在建模时采用机理建模和实验测试相结合的方法,尤其是对电机和螺旋桨进行了详细的建模。首先对所建的模型应用PID进行了姿态角的控制。在此基础上又对各个方向上的速度进行了PlD 控制。然后在四旋翼飞机重心进行偏移的情况下进行PID控制,仿真结果表明PID控制律能有效的控制四旋翼无人机在重心偏移情况下的姿态角和速度。最后为了方便控制加入了控制逻辑。 关键词:四旋翼;建模;PID;控制;重心偏移;控制逻辑 四旋翼无人机是一种具有4个旋翼的飞行器,有X型分布和十字型分布2种。文中采用的是X型分布的四旋翼,四旋翼无人机只能通过改变旋翼的转速来实现各种运动。国外对四旋翼无人直升机的研究非常活跃。加拿大雷克海德大学的Tavebi和McGilvrav证明了使用四旋翼设计可以实现稳定的飞行。澳大利亚卧龙岗大学的McKerrow对Dragantlyer进行了精确的建模。目前国外四旋翼无人直升机的研究工作主要集中在以下3个方面:基于惯导的自主飞行、基于视觉的自主飞行和自主飞行器系统。而国内对四旋翼的研究主要有:西北工业大学、国防科技大学、南京航天航空大学、中国空空导弹研究院第27所、吉林大学、北京科技大学和哈工大等。大多数的研究方式是理论分析和计算机仿真,提出了很多控制算法。例如,针对无人机模型的不确定性和非线性设计的 DI/QFT(动态逆/定量反馈理论)控制器,国防科技大学提出的自抗扰控制器可以对小型四旋翼直升机实现姿态增稳控制,还有一些经典的方法比如PID控制等,但是都不能很好地控制四旋翼速度较大的情况。本文对四旋翼无人机设计了另外一种不同的控制方法即四旋翼的四元数控制律设计,仿真结果表明这种控制方法是一种有效的方法。尤其是对飞机的飞行速度较大的情况,其能稳定地控制四旋翼达到预期的效果。 1 四旋翼的模型 文中所研究的四旋翼结构属于X型分布,即螺旋桨M1和M4与M2和M3关于X轴对称,螺旋桨M1和M2与M3和M4关于Y轴对称,如图1所示。对于四旋翼的模型本文主要根据四旋翼的物理机理进行物理建模,并做以下2条假设。
哈工大威海计算机网络实验报告1资料
计算机网络与通信实验报告(一)学号姓名班级报告日期 2015.04.15 实验内容网络常用命令的使用 实验目的1.熟悉网络命令的使用,例如ping,tracert,netstat,ipconfig等,对结果进行分析判断。 2.熟悉dns的层次查询,以及smtp协议。 实验预备知识结合实验报告相关知识以及老师课堂演示、笔记。 实验过程描述1.按照实验报告步骤所指,一步步熟悉ping tracert ipconfig 等网络命令,并对结果进行相应分析、截图。 2.Dns层次查询时,首先网上搜索全球13 个根域名服务器的ip,选择其中一个ip 对学校主页https://www.360docs.net/doc/d610675898.html, 进行层次分析,依次进行cn https://www.360docs.net/doc/d610675898.html, https://www.360docs.net/doc/d610675898.html, https://www.360docs.net/doc/d610675898.html, 的域名分析,最终得到主页ip,然后使用ping命令ping得主页ip 相比较,结果一致,查询成功。 3.熟悉掌握SMTP协议。Dos 命令下依次输入telnet相关命令,并使用事先转换成base64 的用户名、密码登陆邮箱。登陆成功后给自己的邮箱发送信息,最后退出。操作、邮箱截图如下。 实验结果见表格下方截图。 实验当中问题及解决方法1、telnet命令刚开始dos无法识别,属于不认识的命令。上网查询资料后,在控制面板中设置后成功解决。 2、熟悉SMTP协议时,telnet 登陆邮箱并发送信件,期间出现好多错误,比如单词拼写错误,指令错误。重复多次后最终成功实现。 成绩(教师打分)优秀良好及格不及格
实验相关截图 一、网络命令的使用 1.ping 命令
2.tracert 命令
网络安全 实验报告
首都经济贸易大学信息学院实验报告 实验课程名称网络安全技术 首都经济贸易大学信息学院计算机系制
实验报告 学号:实验地点:3机房 姓名:实验时间: 一、实验室名称:网络安全实验 二、实验项目名称:冰河木马攻击 三、实验原理: 原理:特洛伊木马(简称木马),是一种基于远程控制的黑客工具,具有隐蔽性和破坏性的特点。大多数木马与正规的远程控制软件功能相似。但木马有一些明显的特点,例如,它的安装和操作都是在隐蔽之中完成。攻击者经常将木马隐蔽在一些游戏或小软件中,诱使粗心的用户在自己的机器上运行。最常见的情况是,用户从不正规的网站下载和运行了带恶意代码的软件,或者不小心点击了带恶意代码的邮件附件。 大多数木马包括客户端和服务器端两个部分。攻击者利用一种称为绑定程序的工具将服务器绑定到某个合法软件上,只要用户运行被绑定的合法软件,木马的服务器部分就在用户毫无知觉的情况下完成了安装过程。通常,木马的服务器部分是可以定制的,攻击者可以定制的项目一般包括服务器运行的IP端口号,程序启动时机、如何发出调用、如何隐身、是否加密。另外,攻击者还可以设置登录服务器的密码,确定通信方式。木马攻击者既可以随心所欲地查看已被入侵的机器,也可以用广播方式发布命令,指示所有在他控制之下的木马一起行动,或者向更广泛的范围传播,或者做其他危险的事情。 木马的设计者为了防止木马被发现,会采用多种手段隐藏木马,这样用户即使发现感染了木马,也很验证找到并清除它。木马的危害越来越大,保障安全的最好办法就是熟悉木马的类型、工作原理,掌握如何检测和预防这些代码。常见的木马,例如冰河、Netbus、网络神偷等,都是多用途的攻击工具包,功能非常全面,包括捕获屏幕、声音、视频内容的功能。这些木马可以当作键记录器、远程控制器、FTP服务器、HTTP服务器、Telnet服务器,还能够寻找和窃取密码。攻击者可以配置木马监听的端口、运行方式,以及木马是否通过Email、IRC或其他通信手段联系发起攻击的人。一些危害大的木马还有一定的反侦测能力,能够采取各种方式隐藏自身,加密通信,甚至提供了专业级的API供其他攻击者开发附加的功能。冰河在国内一直是不可动摇的领军木马,有人说在国内没有用过冰河的人等于没用过木马。冰河木马的目的是远程访问、控制。该软件主要用于远程监牢,具体功能包括: (1)自动跟踪目标机屏幕变化,同时完全模拟键盘及鼠标输入,即在同步变化的同时,监控端的一切键盘及鼠标操作将反映在被控端屏幕(局域网适用)。 (2)记录各种口令信息。包括开机口令、屏保口令、各种虚伪补齐诼绝大多数在对话框中出现过的口令信息,且1.2以上的版本中允许用户对该功能自行扩充,2.0以上的版本还同时提供了击键记录功能。 (3)获取系统信息。包括计算机名、注册公司、当前用户、系统路径、操作系统版本、当
舵机高精度测试实验报告
舵机测试实验报告 张冲 一、实验目的 为了较好的设计旋翼无人机的舵机控制系统,必须首先确定舵机的旋转精度,舵机精度的高低直接影响控制的精度。如果舵机的精度达到1°,那么我们现有的控制方式将能很好的实现舵机的控制,从而保证旋翼无人机控制系统的精度。如果达不到1°,那么我们需要根据舵机的实际精度来改进控制方式,使其尽可能的满足旋翼无人机的控制要求。所以我们设计了这个舵机测试实验来验证S3156型舵机精度能否达到1°。 二、实验原理 如图1,舵机的控制信号是脉冲宽度调制(Pulse Wide Modulator,PWM)信号,利用占空比的变化改变舵机的位置。 图1 PWM控制信号(左图) 实测得PWM信号(右图) 受到舵机测试仪给出的PWM控制信号之后,与舵机相连的指针将发生偏转,偏转变化 量将通过转台刻度读出。如果舵机输出位置精度达到1 ,则满足设计要求。 图2舵机精度测试平台
三、实验步骤 1、把舵机固定在转台中央,使得舵机的转子与转台的圆心重合 2、把舵机输入端与PWM波输出卡的一路输出端相连 3、用网线把PWM波输出卡的主机和电脑连接起来(如图3) 4、打开电脑基于labview的PWM波控制界面,测试舵机在逆时针方向上从-30°到30°的线性特性,然后测试舵机在顺时针方向上从30°到-30°的线性特性,记录每组试验结果。 5、通过第4步实验得出的舵机偏转角度每改变1°时,占空比的改变量,来测试舵机转向1°时的实际偏转角度,即舵机的死区测试。 图3 系统连线实拍图 四、实验器材 S3156高精度舵机,PWM波输出卡,PWM波输出卡主机,电脑,转台,稳压电源,导线。 五、实验数据 因为舵机变向时有明显的死区,所以我们把实验分成顺时针转动和逆时针转动时分别测试舵机两个转向上的线性特性,然后第二阶段再测试死区的大小。 逆时针旋转顺时针旋转 偏转角度占空比偏转角度占空比 -30 0.4606 30 0.7879 -29 0.4657 29 0.7828 -28 0.4707 28 0.7778 -27 0.4758 27 0.7728 -26 0.4808 26 0.7678 -25 0.4859 25 0.7628 -20 0.5112 20 0.7376