旋转角和旋转矩阵

1.旋转角度
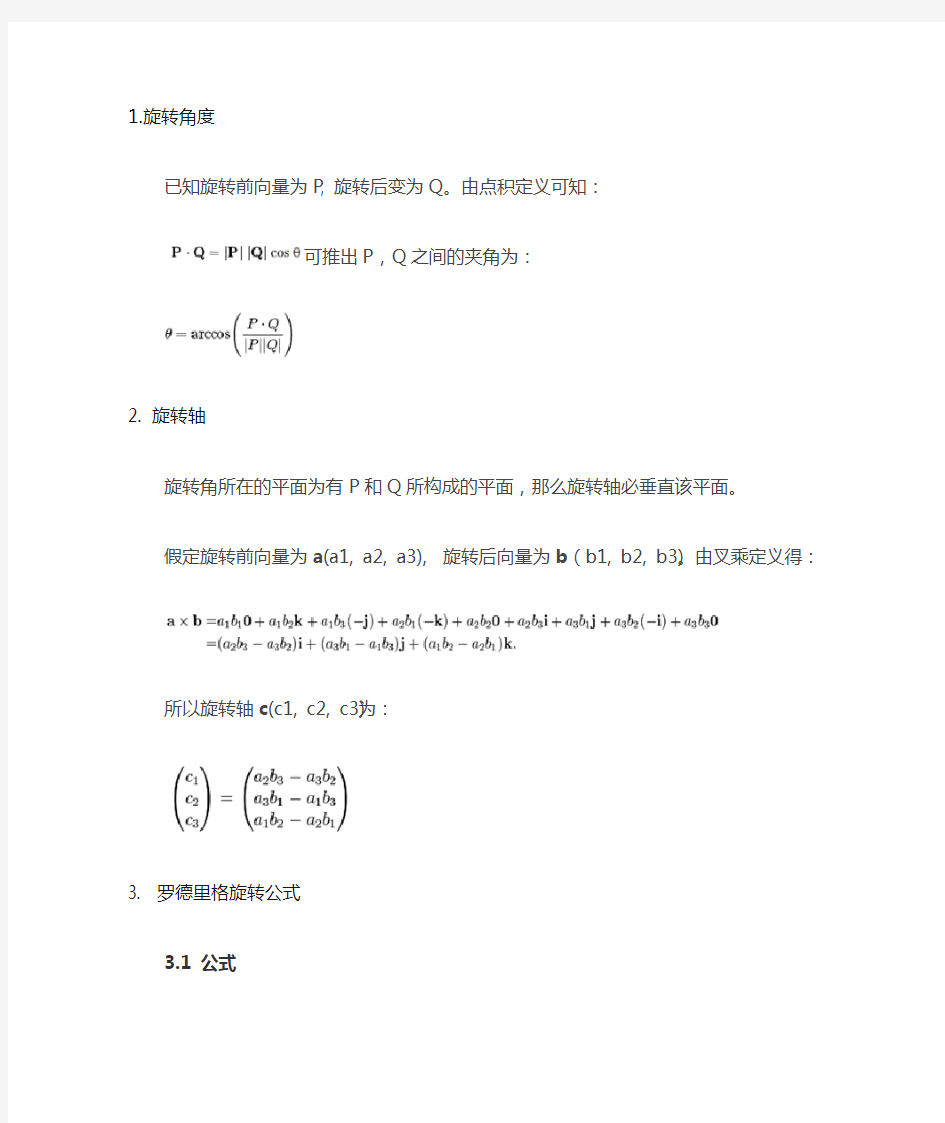
已知旋转前向量为P, 旋转后变为Q。由点积定义可知:
可推出P,Q之间的夹角为:
2. 旋转轴
旋转角所在的平面为有P和Q所构成的平面,那么旋转轴必垂直该平面。
假定旋转前向量为a(a1, a2, a3),旋转后向量为b(b1, b2, b3)。由叉乘定义得:
所以旋转轴c(c1, c2, c3)为:
3. 罗德里格旋转公式
3.1 公式
已知单位向量n ,将它旋转θ角。由罗德里格旋转公式,可知对应的旋转矩阵
根据旋转前后的两个向量值,使用上面的方法,先求出旋转角度和旋转轴,然后用罗德里格旋转公式即可求出对应的旋转矩阵。
具体实现过程可以调用Vector3类,利用里面的叉乘函数crossProduct计算出旋转前后向量的旋转轴:
Vector3rotationAxis = crossProduct( vectorBefore, vectorAfter) 调用求向量模函数和math.h里的acos函数计算出旋转角度:
Float rotationAngle= acos(vectorBefore* vectorAfter/ vectorMag(vectorBefore) /vectorMag(vectorAfter))
然后再利用上面的公式可求出旋转矩阵:
rotatinMatrix[0][0] = cos(angle) + u.x * u.x * (1 - cos(angle)); rotatinMatrix[0][1] = u.x * u.y * (1 - cos(angle) - u.z * sin(angle));
rotatinMatrix[0][2] = u.y * sin(angle) + u.x * u.z * (1 - cos(angle));
rotatinMatrix[1][0] = u.z * sin(angle) + u.x * u.y * (1 - cos(angle)); rotatinMatrix[1][1] = cos(angle) + u.y * u.y * (1 - cos(angle)); rotatinMatrix[1][2] = -u.x * sin(angle) + u.y * u.z * (1 - cos(angle));
rotatinMatrix[2][0] = -u.y * sin(angle) + u.x * u.z * (1 - cos(angle)); rotatinMatrix[2][1] = u.x * sin(angle) + u.y * u.z * (1 - cos(angle)); rotatinMatrix[2][2] = cos(angle) + u.z * u.z * (1 - cos(angle));