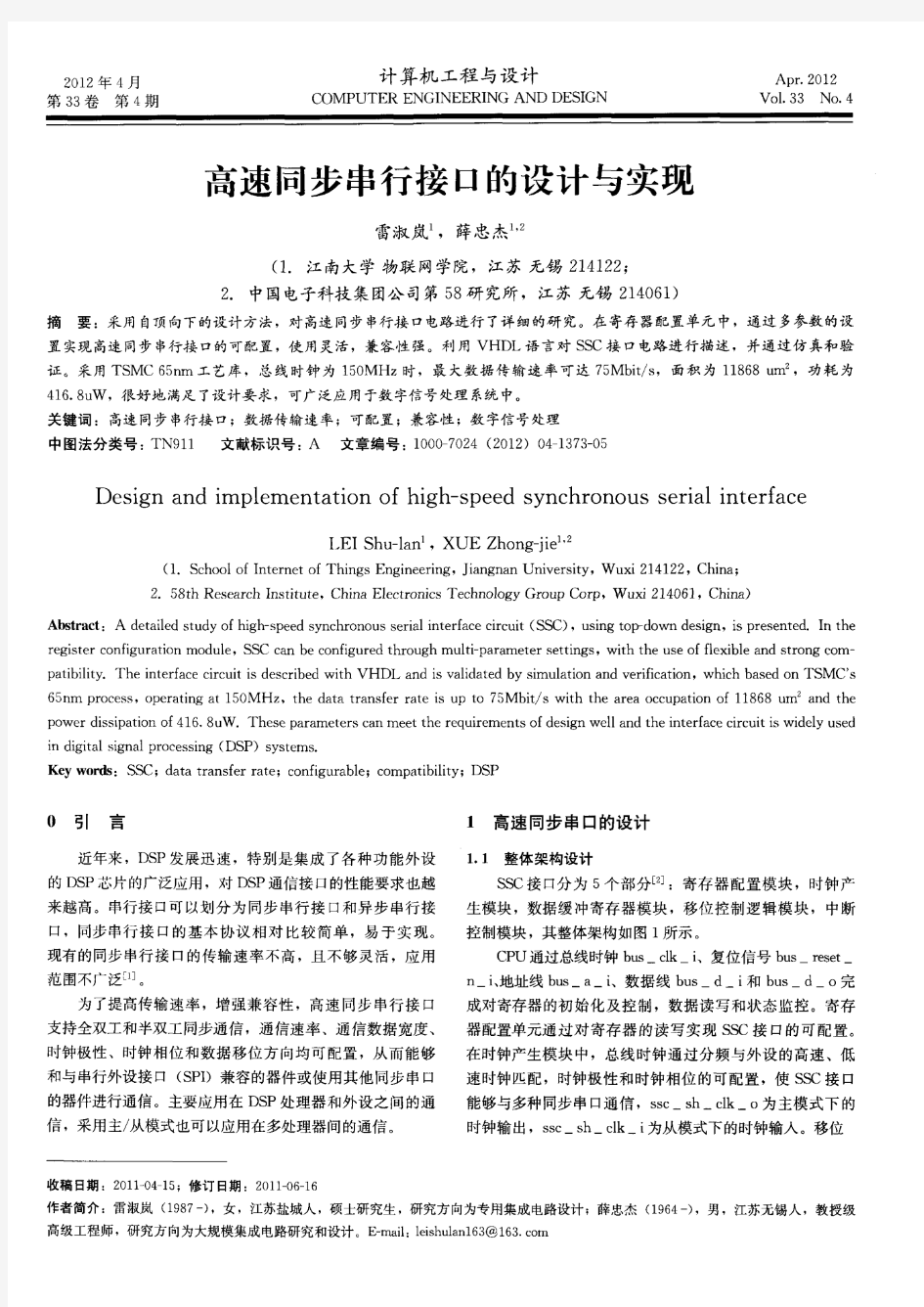
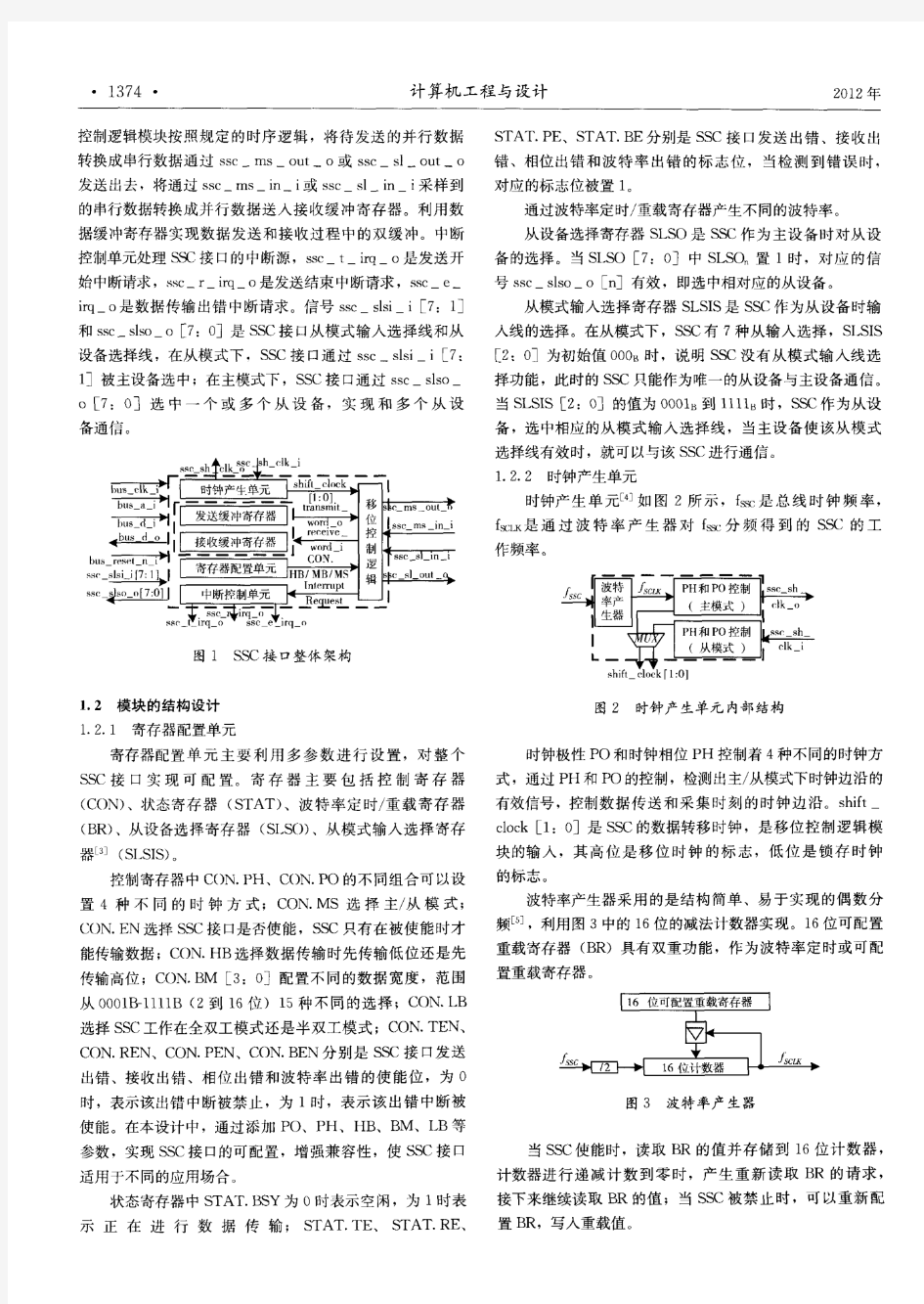
高速同步串行接口的设计与实现
进程同步模拟设计——司机和售票员问题
题目: 进程同步模拟设计——司机和售票员问题 ⑴需求分析; 本程序的功能是模拟公车的司机和售票员的开门以及行车的过程,其实也就是一个典型的进程同步互斥问题,其中主要的两点是 1:司机开车的时候,售票员不能开门,(这里体现的是进程的互斥问题)车停之后,由司机通知售票员开门(这里体现的是进程的同步问题); 2:车门开着的时候,司机不能开车,等售票员把车门关上之后,由售票员通知司机开车。 ⑵功能设计(数据结构及模块说明); 本程序的设计原理比较简单,就是两大部分,一是司机的行车操作过程,另一个是售票员的开车门和关车门(以及售票,本程序不讨论售票过程)的过程。 现在来说明如何具体实现司机开车和售票员售票的相关过程。首先,设置2个私有信号量,分别是司机和售票员的。其中,司机的私有信号量设置为sj,其初始值为0;售票员的私有信号量为spy,其初始值为1;以上的初值表示的是司机和售票员的行车和开关车门的一个具体初始状态,具体的说也就是当车子停着,车门开着的时候的状态,此时,司机不能开车,只有当售票员售完票之后,通知司机才可以。用操作系统书上的方法写出的流程图如下: 司机售票员 这样一来的话,仿照书上的P,V操作,实现司机和售票员之间的同步的过程如下:
begin sj,spy;semaphore //设置司机和售票员的私有信号量; sj=0;spy=1; //设置初始值; cobegin process 司机 //司机的操作过程; begin L1:P(sj); 启动车辆; 正常行驶; 到站停车; V(spy); goto L1; end; process 售票员 //售票员的操作过程; begin L2:P(spy); 开车门; 关车门; V(sj); 售票; goto L2; end; coend; end; ⑶开发平台及源程序的主要部分; 根据以上的原理,再结合自己所学的程序开发语言,最后得出:本程序的开发平台是c++平台,其中源程序的代码如下:
串口和并口的区别
并口、串口、COM口区别 并行接口,简称并口。并口采用的是25针D形接头。所谓“并行”,是指8位数据同时通过并行线进行传送,这样数据传送速度大大提高,但并行传送的线路长度受到限制,因为长度增加,干扰就会增加,数据也就容易出错,目前,并行接口主要作为打印机端口等。 并口的工作模式: 1:SPP(Standard Parallel Port)称为标准并口,它是最早出现的并口工作模式,几乎所有使用并口 的外设都支持该模式。 2:EPP(Enhanced Parallel Port)称为增强型高速并口,它是在SPP 的基础上发展起来的新型工作模式,也是现在应用最多的并口工作模式,目前市面上的大多数打印机、扫描仪都支持EPP 模式。 3:ECP(ExtendedCapability Port)即扩充功能并口,它是目前比较先进的并口工作模式,但兼容性问题也比较多,除非您的外设支持ECP 模式,否则不要选择该模式。 串口叫做串行接口,也称串行通信接口,即COM口。按电气标准及协议来分包括RS-232-C、RS-422、RS485、USB等。RS-232-C、RS-422与RS-485标准只对接口的电气特性做出规定,不涉及接插件、电缆或协议。USB是近几年发展起来的新型接口标准,主要应用于高速数据传输领域。 RS-232-C:也称标准串口,是目前最常用的一种串行通讯接口。它是在1970年由美国电子工业协会(EIA)联合贝尔系统、调制解调器厂家及计算机终端生产厂家共同制定的用于串行通讯的标准。它的全名是“数据终端设备(DTE)和数据通讯设备(DCE)之间串行二进制数据交换接口技术标准”。传统的RS-232-C接口标准有22根线,采用标准25芯D型插头座。后来的PC上使用简化了的9芯D型插座。现在应用中25芯插头座已很少采用。现在的电脑一般有两个串行口:COM1和COM2,你到计算机后面能看到9针D形接口就是了。现在有很多手机数据线或者物流接收器都采用COM口与计算机相连。
18F66K80串行口中文详解
SPEN=1 TRISx=1 异步模式、同步模式主动 每个增强型USART模块的操作 通过三个控制寄存器: ?发送状态和控制(TXSTAx) ?接收状态和控制(RCSTAx) ?波特率控制(BAUDCONx) TXSTAx: 第7位CSRC:时钟源选择位 异步模式:随意设置。 同步模式:1 =主模式(时钟来自内部BRG)0=从模式(从外部时钟源) 第6位TX9:9位发送使能位 1 =选择9位发送0 =选择8位传输 第5位TXEN:发送使能位(1)1 =使能发送0=发送被禁用 第4位SYNC同步:EUSART模式选择位 1 =同步模式0 =异步模式 第3位 SENDB:发送间隔字符位 异步模式: 1 =在下一次发送时发送同步间隔(完成后由硬件清零)0 =同步间隔发送完成同步模式:CSRC 第2位BRGH:高波特率选择位异步模式: 1 =高转速0=低转速 同步模式:未使用的这种模式。 位1 TRMT:发送移位寄存器状态位 1 = TSR为空0 = TSR是满 位0 TX9D:发送数据的第9位可以是地址/数据位或奇偶校验位。 RCSTAx: 第7位SPEN位置:串行端口使能位 1 =使能串口(配置RXx /的DTX及TXXX / CKx为串口引脚引脚) 0 =串行端口被禁用(在复位状态) 第6位RX9位置:9位接收使能位 1 =选择9位接收0 =选择8位接收 第5位SREN:单接收使能位 异步模式:无需设置。 同步模式—主动模式: 1 =使能接收单0 =禁止接收单此位接收完成后清零。 同步模式—从动模式:无需设置。 第4位CREN:连续接收使能位 异步模式: 1 =使能接收器0 =禁止接收器 同步模式: 1 =使能连续接收,直到使能位CREN位被清零 0 =禁止连续接收 第3位ADDEN:地址检测使能位 异步模式9位(RX9位置= 1): 1 =使能地址检测,允许中断并装载接收缓冲器当RSR <8>设置 0 =禁止地址检测,所有字节接收和第九位,可作为奇偶校验位 异步模式9位(RX9位置= 0):无需设置。 第2位FERR:帧错误位 1 =帧错误(可以通过阅读RCREGx清理登记和接收下一个有效字节) 0 =无帧错误
高速伺服总线及接口
高速伺服总线及接口在数控行业的发展概况 ——机自14班2110101092 牛善涛在计算机系统中,总线接口对整个系统的性能和功能都有直接影响,有关专家预测,在下一世纪里,串行总线将逐渐取代并行总线。 在数控系统中,个人计算机技术与数控技术越来越紧密地结合,由此而产生的具有开放性的PCNC数控系统,正在取代传统形式的数控系统,并成为市场的主流产品。计算机总线结构的变革,必将影响数控系统的体系结构,串行总线的应用将极大地改变现有的传统数控系统的结构形式。 串行总线的优点: 同并行总线相比,串行总线具有许多优点。串行总线连接引脚数量少,连接简单,成本较低,系统可靠性高。串行总线对系统体系结构具有重大的影响,它的应用有助于数据流计算机体系结构的实现。 对于高速计算机系统,串行总线比并行总线更容易使用。在并行总线中,传输数据的各个位必须处于一个时钟周期内的相同位置,频率越高,对器件的传输性能和电路结构要求越严格,系统设计难度加大,致使系统成本提高,可靠性降低。相比之下,使用串行总线时,数据的各个位是串行传输的。在串行总线设计时,既可以嵌入时钟信号作为同步信号,也可以采用锁相环的时钟恢复方式;同并行总线相比,串行总线的传输线效应比较容易处理,从而降低设计难度和系统成本。 另外,以串行信息包为基础的系统,不需要编写驱动程序。当断开任何一根互连线,对全部信息包进行解码时,串行总线将这些信息包移入存储器并中断处理器,这是一种局部的中断或事件。随后微处理器将查看这些信息包,而不需要用驱动程序进行上述工作。系统将成为一种信息传递系统,而不是事件驱动系统。 外围串行总线方式,如IEEE-1394/火线和USB(通用串行总线),已能成功应用。某些供应商准备采用某种串行总线方式替代PCI(外围器件互连)系统总线。
实验二(1)进程同步
实验二(2)进程同步 一、实验目的 1、生产者-消费者问题是很经典很具有代表性的进程同步问题,计算机中的很多同步问题都可抽象为生产者-消费者问题,通过本实验的练习,希望能加深学生对进程同步问题的认识与理解。 2、熟悉VC的使用,培养和提高学生的分析问题、解决问题的能力。 二、实验内容及其要求 1.实验内容 以生产者/消费者模型为依据,创建一个控制台进程,在该进程中创建n个线程模拟生产者和消费者,实现进程(线程)的同步与互斥。 2.实验要求 学习并理解生产者/消费者模型及其同步/互斥规则;设计程序,实现生产者/消费者进程(线程)的同步与互斥; 三、实验算法分析 1、实验程序的结构图(流程图); 2、数据结构及信号量定义的说明; (1) CreateThread ●功能——创建一个在调用进程的地址空间中执行的线程 ●格式 HANDLE CreateThread( LPSECURITY_ATTRIBUTES lpThreadAttributes, DWORD dwStackSize,
LPTHREAD_START_ROUTINE lpStartAddress, LPVOID lpParamiter, DWORD dwCreationFlags, Lpdword lpThread ); ●参数说明 lpThreadAttributes——指向一个LPSECURITY_ATTRIBUTES(新线程的安全性描述符)。dwStackSize——定义原始堆栈大小。 lpStartAddress——指向使用LPTHRAED_START_ROUTINE类型定义的函数。 lpParamiter——定义一个给进程传递参数的指针。 dwCreationFlags——定义控制线程创建的附加标志。 lpThread——保存线程标志符(32位) (2) CreateMutex ●功能——创建一个命名或匿名的互斥量对象 ●格式 HANDLE CreateMutex(LPSECURITY_ATTRIBUTES lpMutexAttributes, BOOL bInitialOwner, LPCTSTR lpName); bInitialOwner——指示当前线程是否马上拥有该互斥量(即马 ●参数说明 lpMutexAttributes——必须取值NULL。上加锁)。 lpName——互斥量名称。 (3) CreateSemaphore ●功能——创建一个命名或匿名的信号量对象 ●格式 HANDLE CreateSemaphore(LPSECURITY_ATTRIBUTES lpSemaphoreAttributes, LONG lInitialCount, LONG lMaximumCount, LPCTSTR lpName ); ●参数说明 lpSemaphoreAttributes——必须取值NULL。
第九章并行接口与串行接口习题选解
9.4写出下列两种情况下8,}55A的工作方式控制字(包括I/O方式控制字和必要的按位置位/复位控制字)。 (1) 8255A用做键盘和终端地址接口,如图9 ..4所示。. (2)8255A用做基本软盘接日,如图9.5所示。 解:(1)由图9.4可知:A口工作在方式1输人,采用中断读键盘,C口的PC4 , PC5为A口方式1输人提供固定的握手联络信号,而PC6,PC7用于输出“LT忙”和“测试LT",所以C口高4位工作在方式。输出,B口用于输人终端地址,所以B口应工作在方式。输人。由此分析可知,8255A的初始化包括设置工作方式和开中断操作,其控制字为: 工作方式控制字:1011001 x B 按位置位/复位控制字(开放中断INTEA=1,即PC4置位):00001001B (2) A口工作在方式2中断方式输人/输出,B口和C口低4位工作在方式0输出,所以8255A的初始化也包括设置工作方式和开中断操作,其控制字为: 工作方式控制字:11 x x x 000B 开放输人中断按位置位/复位控制字,即PC4置位:0000l001B 开放输出中断按位置位/复位控制字,即PC6置位:00001101B 9.5设8255A的端口A,B,C和控制寄存器的地址为F4H,F5H,F6H,F7H,要使A口工作于方式0输出,B口工作于方式1输人.C口上半部输人,下半部输出,且要求初始化时使PC6=0.试设计82SSA与PC系列机的接A电路,并编写初始化程序。 解:82SSA与FC系列机的接口电路如图9.5所示。初始化程序如下:· MO V A L , 10001110F3 ;方式字 OUT 0F7H, AL MOV AL,00000110B ;PC6=0 OUT 0F7H, AL MOV AL,00000101 ;开中断 OUT 0F7H,AL 9.6在PC系列微机系统中,用8255A做某快速启停电容式纸带机接口的硬件连接如图9.7
串行通信接口典型应用举例
串行通信接口典型应用举例 SCI_FLAG .usect ".data0",1 ;SCI标志寄存器 TXD_PTR .usect ".data0",8 ;发送的数据存放区 RXD_PTR .usect ".data0",8 ;接收到的数据存放区 .include "F2407REGS.H" ;引用头部文件 .def _c_int0 ;(1)建立中断向量表 .sect ".vectors" ;定义主向量段 RSVECT B _c_int0 ;PM 0 复位向量 1 INT1 B GISR1 ;PM 2 中断优先级1 4 INT2 B PHANTOM ;PM 4 中断优先级2 5 INT3 B PHANTOM ;PM 6 中断优先级3 6 INT4 B PHANTOM ;PM 8 中断优先级4 7 INT5 B PHANTOM ;PM A中断优先级5 8 INT6 B PHANTOM ;PM C 中断优先级6 9 RESERVED B PHANTOM ;PM E (保留位) 10 SW_INT8 B PHANTOM ;PM 10 用户定义软件中断— … SW_INT31 B PHANTOM ;PM 3E 用户定义软件中断— ;中断子向量入口定义pvecs .sect ".pvecs" ;定义子向量段 PVECTORS B PHANTOM ;保留向量地址偏移量0000h B PHANTOM ;保留向量地址偏移量0001h … B PHANTOM ;保留向量地址偏移量0005h B SCI_RX_ISR ;保留向量地址偏移量0006h SCI接收中断 B PHANTOM ;保留向量地址偏移量0007h … B PHANTOM ;保留向量地址偏移量0041h ;(2)主程序: .text _c_int0 SETC INTM CLRC SXM CLRC OV M CLRC CNF 214
武汉理工大学 进程同步模拟设计-——吃水果问题
进程同步模拟设计 ——吃水果问题 1需求分析 1.1吃水果问题的描述 桌子上有一只盘子,最多可容纳两个水果,每次只能放入或者取出一个水果。爸爸专门向盘子中放苹果,妈妈专门向盘子中放橘子,两个儿子专门等待吃盘子中的橘子,两个女儿专门等吃盘子中的苹果。 1.2问题的转换 这是进程同步问题的模拟,可以把向盘子放或取水果的每一个过程可以转为一个进程的操作,这些进程是互斥的,同时也存在一定的同步关系。通过编程实践时,实际是随机的调用人一个进程的操作,而这些进程的操作相当于程序中的函数调用。而计算机在执行时每一个时刻只能执行一个操作,这就默认了互斥。同步的模拟可以类似于函数调用时的前提关系即先决条件。 这样进程同步模拟就完全可以通过函数的调用来实现。 具体的每一个操作的对应的函数的关系: 爸爸向盘子中放一个苹果:Father() 妈妈向盘子中放一个橘子:Mother() 儿子1从盘子取一个橘子:Son1() 儿子2从盘子取一个橘子:Son2() 女儿1从盘子取一个苹果:Daugther1() 儿子1从盘子取一个苹果:Daugther2()
2功能设计 2.1 数据结构 (1)用一个整型变量Plate_Size表示盘子,初始值为0,当放水果时Plate_Size 加1,取水果时Plate_Size减1。变量Plate_Size的最大值为2,当为2时表示盘子已经满,此时若进行放水果操作,放水果将处于等待状态;为0时表示盘子为空,此时若进行取水果操作,取水果操作将处于等待状态。 (2)整型变量orange和apple分别表示盘子中的橘子和苹果数目,初始都为0,Plate_Size=apple+orange。 (3)用6个bool型的变量Father_lag,Mother_lag,Son1_lag,Son2_lag,Daughter1_lag,Daughter2_lag表示六个进程是否处于等待状态。处于等待时,变量值为true。 (4)两个放水果进程进程同时处于等待状态时,若有取水果的操作将自动执行等待的放水果进程,执行按等待的先后顺序;两个取苹果或橘子进程同时候处于等待状态,若有放苹果或橘子的操作将自动执行等待的取进程,进行按等待的先后顺序。 (5)用一个随机的函数产生0—5的6个整数,分别对应六个进程的调用。2.2模块说明 (1)main函数:用一个随机的函数产生0—5的6个整数,分别对应六个进程的 调用,调用的次数可以自己输入,本程序共产生了10次随机的调用进程。 (2)6个进程函数:爸爸向盘子中放一个苹果操作:Father();妈妈向盘子中放一 个橘子操作:Mother();儿子1从盘子取一个橘子操作:Son1();儿子2从盘子取一个橘子操作:Son2();女儿1从盘子取一个橘子操作:Daugther1(); 女儿2从盘子取一个橘子操作:Daugther2()。 (3)Print函数:用于输出盘子中苹果和橘子的个数,水果总个数及有哪些进程处于等待状态。 2.3 操作的流程图 (1)放水果操作
串行并行接口差别
串口与并口的区别 传输方式 串口形容一下就是一条车道,而并口就是有8个车道同一时刻能传送8位(一个位元组)数据。但是并不是并口快,由于8位通道之间的互相干扰。传输时速度就受到了限制。而且当传输出错时,要同时重新传8个位的数据。串口没有干扰,传输出错后重发一位就可以了。所以要比并口快。串口硬盘就是这样被人们重视的。从原理上讲,串行传输是按位传输方式,只利用一条信号线进行传输,例如:要传送一个字节(8位)数据,是按照该字节中从最高位逐位传输,直至最低位。 而并行传输是一次将所有一字节中8位信号一并传送出去。自然最少需要8根信号线。 如果按每次传送的数据流量来看,并行传输要远快于串口,在电脑发展初期,由于数据传输速率不是很高,并行传输还是很快的。 发展趋势 并口传输的发展主要存在以下两个问题: 1、干扰问题。 干扰产生的根本原因是由于传输速率太快,一般达到100M以上,信号线上传递的频率将超过100MHz。想想看,调频收音机的频率也不过 88~108MHz,也就是说,若用并行传输的话,是8根天线放在一起来传输信号,不发生干扰才怪。但如果加强屏蔽,减小信号线间的耦合电容,是可以继续增大传输速率的,不过这将变得不现实,因为这必然导致信号线将耗用更多金属,截面积更大。但这并不是不能解决的问题。 2、同步问题(最主要问题) 并行传输时,发送器是同时将8位信号电平加在信号线上,电信号虽然是以光速传输的,但仍有延迟,因此8位信号不是严格同时到达接受端,速率小时,由于每一字节在信号线上的持续时间较长,这种到达时间上的不同步并不严重,随着传输速率的增加,与8位信号到达时间的差异相比,每一字节的持续时间显得越来越短,最终导致前一字节的某几位与后一字节的几位同时到达接受端,这就造成了传输失败,而且随着信号线的加长这种现象还会越发严重,直至无法使用。——这是并口传输的致命缺点。 串行传输由于只有一位信号在信号线上,没有位同步问题,因此传送频率可以继续提高,当前传输速率已经达到1Gb/s(1000Mb)以上,而且还在提高,而并行传输在100Mb/s左右就停滞不前了,可以预见,串行传输
串行通信的同步传输与异步传输
------分隔线---------------------------- 这里所讲的同步传输和异步传输不同于VC 串口编程时的同步和异步,这里只讲串口硬件层传输的两种模式,有关VC 串口编程的同步模式和异步模式我将另外写一篇文章。 这里所讲的同步和异步是从硬件层级来讲的。首先要知道什么串行传输,串行传输是指数据的二进制代码在一条物理信道上以位为单位按时间顺序逐位传输的方式。串行传输时,发送端逐位发送,接收端逐位接受,同时,还要对所接受的字符进行确认,所以收发双方要采取同步措施(即判断什么时候有数据,数据是什么,什么时候结束传输)。 同步措施有两种,一种在传输的每个(帧)数据前(数据可能是5~8位)加一个起始位,后面加一位校验位及一位或两位的停止位组成一帧数据,这各方式称为异步传输;另一种是在一次传输(可能是多个字节)前加同步字节,可能不止一个字节,最后加校验字节或代表结束标志的字节,这种方式称为同步传输方式。 异步传输 异步传输将比特分成小组进行传送,小组可以是8位的1个字符或更长。发送方可以在任何时刻发送这些比特组,而接收方从不知道它
们会在什么时候到达。一个常见的例子是计算机键盘与主机的通信。按下一个字母键、数字键或特殊字符键,就发送一个8比特位的ASCII 代码。键盘可以在任何时刻发送代码,这取决于用户的输入速度,内部的硬件必须能够在任何时刻接收一个键入的字符。 异步传输存在一个潜在的问题,即接收方并不知道数据会在什么时候到达。在它检测到数据并做出响应之前,第一个比特已经过去了。这就像有人出乎意料地从后面走上来跟你说话,而你没来得及反应过来,漏掉了最前面的几个词。因此,每次异步传输的信息都以一个起始位开头,它通知接收方数据已经到达了,这就给了接收方响应、接收和缓存数据比特的时间;在传输结束时,一个停止位表示该次传输信息的终止。按照惯例,空闲(没有传送数据)的线路实际携带着一个代表二进制1的信号,异步传输的开始位使信号变成0,其他的比特位使信号随传输的数据信息而变化。最后,停止位使信号重新变回1,该信号一直保持到下一个开始位到达。例如在键盘上数字“1”,按照8比特位的扩展ASCII编码,将发送“00110001”,同时需要在8比特位的前面加一个起始位,后面一个停止位。 异步传输的实现比较容易,由于每个信息都加上了“同步”信息,因此计时的漂移不会产生大的积累,但却产生了较多的开销。在上面的例子,每8个比特要多传送两个比特,总的传输负载就增加25%。对于数据传输量很小的低速设备来说问题不大,但对于那些数据传输量很大的高速设备来说,25%的负载增值就相当严重了。因此,异步传输常用于低速设备。
通信协议简介及区别(串行、并行、双工、RS232等)
基本的通讯方式有并行通讯和串行通讯两种。 并行通讯:一条信息的各位数据被同时传送的通讯方式称为并行通讯。 并行通讯的特点是:各数据位同时传送,传送速度快、效率高,但有多少数据位就需多少根数据线,因此传送成本高,且只适用于近距离(相距数米)的通讯。 串行通讯:一条信息的各位数据被逐位按顺序传送的通讯方式称为串行通讯。 串行通讯的特点是:数据位传送,传按位顺序进行,最少只需一根传输线即可完成,成本低但送速度慢。串行通讯的距离可以从几米到几千米。 根据信息的传送方向,串行通讯可以进一步分为单工、半双工和全双工三种。信息只能单向传送为单工;信息能双向传送但不能同时双向传送称为半双工;信息能够同时双向传送则称为全双工。 而按照串行数据的时钟控制方式,串行通信又可分为同步通信和异步通信两种方式。 异步通信:接收器和发送器有各自的时钟; 同步通信:发送器和接收器由同一个时钟源控制。 1、异步串行方式的特点 所谓异步通信,是指数据传送以字符为单位,字符与字符间的传送是完全异步的,位与位之间的传送基本上是同步的。异步串行通信的特点可以概括为: ①以字符为单位传送信息。 ②相邻两字符间的间隔是任意长。 ③因为一个字符中的比特位长度有限,所以需要的接收时钟和发送时钟只要相近就可以,不需同步。 ④异步方式特点简单的说就是:字符间异步,字符内部各位同步。 2、异步串行方式的数据格式 异步串行通信的数据格式如图1所示,每个字符(每帧信息)由4个部分组成: ①1位起始位,规定为低电0; ②5~8位数据位,即要传送的有效信息; ③1位奇偶校验位; ④1~2位停止位,规定为高电平1。 3、同步串行方式的特点 所谓同步通信,是指数据传送是以数据块(一组字符)为单位,字符与字符之间、字符内部的位与位之间都同步。同步串行通信的特点可以概括为: ①以数据块为单位传送信息。 ②在一个数据块(信息帧)内,字符与字符间无间隔。 ③因为一次传输的数据块中包含的数据较多,所以接收时钟与发送进钟严格同步,通常要有同步时钟。 4、同步串行方式的数据格式 同步串行通信的数据格式如图2所示,每个数据块(信息帧)由3个部分组成: ①2个同步字符作为一个数据块(信息帧)的起始标志; ②n个连续传送的数据 ③2个字节循环冗余校验码(CRC) 图1 异步串行数据格式图2 同步串行数据格式
进程同步模拟吃水果,操作系统课程设计报告书
某某大学 课程设计报告课程名称:操作系统课程设计 设计题目:进程同步模拟吃水果问题系别:计算机系 专业:计算机科学与技术 组别: 学生: 学号: 起止日期: 指导教师:
目录 第一章需求分析 (1) 1.1问题概述 (1) 1.2任务分析 (1) 1.3设计思路 (1) 1.4运行环境 (1) 第二章概要设计 (2) 2.1 数据结构 (2) 2.2模块说明 (2) 2.2.1主函数 (2) 2.2.2 6个进程函数 (2) 2.3 操作的流程图 (3) 第三章详细设计 (4) 3.1定义类 (4) 3.2定义各个过程 (5) 3.3定义Print()函数 (5) 3.4主函数 (6) 第四章调式和操作说明 (13) 4.1测试用例 (13) 4.2运行结果 (14) 第五章总结和体会 (15) 参考文献: (15) 致谢: (15)
第一章需求分析 1.1问题概述 桌子上有一只盘子,最多可容纳两个水果,每次只能放入或者取出一个水果。爸爸专门向盘子中放苹果,妈妈专门向盘子中放橘子,两个儿子专门等待吃盘子中的橘子,两个女儿专门等吃盘子中的苹果。 1.2任务分析 1.模拟吃水果的同步模型:桌子上有一只盘子,最多可容纳两个水果,每次只能放入或者取出一个水果。爸爸专门向盘子中放苹果,妈妈专门向盘子中放橘子,两个儿子专门等待吃盘子中的橘子,两个女儿专门等吃盘子中的苹果。 2.设计报告容要求:模拟吃水果问题,实现进程的同步操作; 给出实现方案(包括数据结构和模块说明等);画出程序的基本结构框图和流程图;分析说明每一部分程序的的设计思路;实现源代码; 按期提交完整的程序代码和可执行程序;根据要求完成课程设计报告。 1.3设计思路 这是进程同步问题的模拟,可以把向盘子放或取水果的每一个过程可以转为一个进程的操作,这些进程是互斥的,同时也存在一定的同步关系。通过编程实践时,实际是随机的调用人一个进程的操作,而这些进程的操作相当于程序中的函数调用。而计算机在执行时每一个时刻只能执行一个操作,这就默认了互斥。同步的模拟可以类似于函数调用时的前提关系即先决条件。这样进程同步模拟就完全可以通过函数的调用来实现。 具体的每一个操作的对应的函数的关系: 爸爸向盘子中放一个苹果:Father() 妈妈向盘子中放一个橘子:Mother() 儿子1从盘子取一个橘子:Son1() 儿子2从盘子取一个橘子:Son2() 女儿1从盘子取一个橘子:Daugther1() 儿子1从盘子取一个橘子:Daugther2() 1.4运行环境
SPI同步串行总线原理
三、SPI是英文Serial Peripheral Interface的缩写,中文意思是串行外围设备接口,SPI是Motorola公司推出的一种同步串行通讯方式,是一种三线同步总线,因其硬件功能很强,与SPI有关的软件就相当简单,使CPU有更多的时间处理其他事务。 SPI概述 SPI:高速同步串行口。3~4线接口,收发独立、可同步进行. SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB 的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议,比如AT91RM9200. SPI总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI 和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。 SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以(单向传输时)。也是所有基于SPI的设备共有的,它们是SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选)。 (1)SDO –主设备数据输出,从设备数据输入 (2)SDI –主设备数据输入,从设备数据输出 (3)SCLK –时钟信号,由主设备产生 (4)CS –从设备使能信号,由主设备控制 其中CS是控制芯片是否被选中的,也就是说只有片选信号为预先规定的使能信号时(高电位或低电位),对此芯片的操作才有效。这就允许在同一总线上连接多个SPI设备成为可能。 接下来就负责通讯的3根线了。通讯是通过数据交换完成的,这里先要知道SPI是串行通讯协议,也就是说数据是一位一位的传输的。这就是SCK时钟线存在的原因,由SCK提供时钟脉冲,SDI,SDO则基于此脉冲完成数据传输。数据输出通过SDO 线,数据在时钟上升沿或下降沿时改变,在紧接着的下降沿或上升沿被读取。完成一位数据传输,输入也使用同样原理。这样,在至少8次时钟信号的改变(上沿和下沿为一次),就可以完成8位数据的传输。 要注意的是,SCK信号线只由主设备控制,从设备不能控制信号线。同样,在一个基于SPI的设备中,至少有一个主控设备。这样传输的特点:这样的传输方式有一个优点,与普通的串行通讯不同,普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。也就是说,主设备通过对SCK时钟线的控制可以完成对通讯的控制。SPI还是一个数据交换协议:因为SPI的数据输入和输出线独立,所以允许同时完成数据的输入和输出。不同的SPI设备的实现方式不尽相同,主要是数据改变和采集的时间不同,在时钟信号上沿或下沿采集有不同定义,具体请参考相关器件的文档。 在点对点的通信中,SPI接口不需要进行寻址操作,且为全双工通信,显得简单高效。在多个从设备的系统中,每个从设备需要独立的使能信号,硬件上比I2C系统要稍微复杂一些。 最后,SPI接口的一个缺点:没有指定的流控制,没有应答机制确认是否接收到数据。 AT91RM9200的SPI接口主要由4个引脚构成:SPICLK、MOSI、MISO及/SS,其中SPICLK是整个SPI总线的公用时钟,MOSI、MISO作为主机,从机的输入输出的标志,MOSI是主机的输出,从机的输入,MISO 是主机的输入,从机的输出。/SS是从机的标志管脚,在互相通信的两个SPI总线的器件,/SS管脚的电平低的是从机,相反/SS管脚的电平高的是主机。在一个SPI通信系统中,必须有主机。SPI总线可以配置成单主单从,单主多从,互为主从。 SPI的片选可以扩充选择16个外设,这时PCS输出=NPCS,说NPCS0~3接4-16译码器,这个译码器是需要外接4-16译码器,译码器的输入为NPCS0~3,输出用于16个外设的选择。 [编辑本段] SPI协议举例
二进程同步算法模拟
实验二进程同步算法模拟 一、实验目的 1、模拟设计一种进程调度过程:FCFS、短作业优先、高响应比优 先(任选其一)。 2、算法代码实现,模拟数据演示,模拟结果验证。 二、实验学时 4课时 三、实验环境与平台 Windows 2000, C/C++程序开发集成环境(开发语言可自选) 四、实验内容及要求 1、实验内容:(1)自定义PCB的数据结构;(2)针对资源分配 中出现的问题,选择适合的算法,实现资源的合理分配。 2、实验要求:(1)完成规定的实验内容;(2)在实验之前,利 用课外时间浏览帮助文件的相关主题内容;(3)实验时保存程序代码;(4)写出实验报告.(实验目的、实验时间、实验设备和实验环境平台、完成的实验内容、实验结果和结论)。 五、完成的实验内容 下例是用C语言编写,用TC2.0调试结果 六、实现代码如下: #include "stdio.h" #define getjcb(type) (type*)malloc(sizeof(type)) #define NULL 0 int n=0,time=0;float eti,ewi; struct jcb{ char name[10]; /* 作业名 */ char state; /* 作业状态 */ int ts; /* 提交时间 */ float super; /* 优先权 */ int tb; /* 开始运行时间 */ int tc; /* 完成时间 */
float ti; /* 周转时间 */ float wi; /* 带权周转时间 */ int ntime; /* 作业所需运行时间 */ char resource[10]; /* 所需资源 */ struct jcb *link; /* 结构体指针 */ } *p,*q,*head=NULL; typedef struct jcb JCB; inital(){ int i; printf("\nInput jcb num\n"); scanf("%d",&n); printf("Input\nname\tts\tntime\tresource\n"); for(i=0;i
串口和并口及引脚定义(精)
串口和并口的区别悬赏分:0 - 解决时间:2006-10-19 10:01 电脑25针和9针的口哪个是串口哪个是并口有什么区别啊提问者: gr_honey - 三级最佳答案RS-232串行接口定义计算机侧为25针公插: 设备侧为25针母插: 引脚定义 Pin Name ITU-T Dir Description 1 GND 101 Shield Ground 2 TXD 103 Transmit Data 3 RXD 104 Receive Data 4 RTS 105 Request to Send 5 CTS 106 Clear to Send 6 DSR 107 Data Set Ready 7 GND 102 System Ground 8 CD 109 Carrier Detect 9 - - RESERVED 10 - - RESERVED 11 STF 126 Select Transmit Channel 12 S.CD ? Secondary Carrier Detect 13 S.CTS ? Secondary Clear to Send 14 S.TXD ? Secondary Transmit Data 15 TCK 114 Transmission Signal Element Timing 16 S.RXD ? Secondary Receive Data 17 RCK 115 Receiver Signal Element Timing 18 LL 141 Local Loop Control 19 S.RTS ? Secondary Request to Send 20 DTR 108 Data Terminal Ready 21 RL 140 Remote Loop Control 22 RI 125 Ring Indicator 23 DSR 111 Data Signal Rate Selector 24 XCK 113 Transmit Signal Element Timing 25 TI 142 Test Indicator PC/AT 机上的串行口是 9 针公插座,引脚定义为: Pin Name Dir Description 1 CD Carrier Detect 2 RXD Receive Data 3 TXD Transmit Data 4 DTR Data Terminal Ready 5 GND System Ground 6 DSR Data Set Ready 7 RTS Request to Send 8 CTS Clear to Send 9 RI Ring Indicator PC/XT 机上的串行口是 25 针公插座,引脚定义为: Pin Name Dir Description 1 SHIELD - Shield Ground 2 TXD Transmit Data 3 RXD Receive Data 4 RTS Request to Send 5 CTS Clear to Send 6 DSR Data Set Ready 7 GND - System Ground 8 CD Carrier Detect 9 n/c - 10 n/c - 11 n/c - 12 n/c - 13 n/c - 14 n/c - 15 n/c - 16 n/c - 17 n/c - 18 n/c - 19 n/c - 20 DTR Data Terminal Ready 21 n/c - 22 RI Ring Indicator 23 n/c - 24 n/c - 25 n/c - PC 并行接口定义 PC 并行接口外观是 25 针母插座: Pin Name Dir Description 1 /STROBE Strobe 2 D0 Data Bit 0 3 D1 Data Bit 1 4 D2 Data Bit 2 5 D3 Data Bit 3 6 D4 Data Bit 4 7 D5 Data Bit 5 8 D6 Data Bit 6 9 D7 Data Bit 7 10 /ACK Acknowledge 11 BUSY Busy 12 PE Paper End 13 SEL Select 14 /AUTOFD Autofeed 15 /ERROR Error 16 /INIT Initialize 17 /SELIN Select In 18 GND Signal Ground 19 GND Signal Ground 20 GND Signal Ground 21 GND Signal Ground 22 GND Signal Ground 23 GND Signal
STM32 USART同步异步串行通讯
慢慢的看一下,应该容易理解. 在网络通信过程中,通信双方要交换数据,需要高度的协同工作。为了正确的解释信号,接收方必须确切地知道信号应当何时接收和处理,因此定时是至关重要的。在计算机网络中,定时的因素称为位同步。同步是要接收方按照发送方发送的每个位的起止时刻和速率来接收 数据,否则会产生误差。通常可以采用同步或异步的传输方式对位进行同步处理。 1. 异步传输(Asynchronous Transmission):异步传输将比特分成小组进行传送,小组可以是8位的1个字符或更长。发送方可以在任何时刻发送这些比特组,而接收方从不知道它们会在什么时候到达。一个常见的例子是计算机键盘与主机的通信。按下一个字母键、数字键或特殊字符键,就发送一个8比特位的ASCII代码。键盘可以在 任何时刻发送代码,这取决于用户的输入速度,内部的硬件必须能够在任何时刻接收一个键入的字符。 异步传输存在一个潜在的问题,即接收方并不知道数据会在什么时候到达。在它检测到数据并做出响应之前,第一个比特已经过去了。这就像有人出乎意料地从后面走上来跟你说话,而你没来得及反应过来,漏掉了最前面的几个词。因此,每次异步传输的信息都以一个起始位开头,它通知接收方数据已经到达了,这就给了接收方响应、接收和缓存数据比特的时间;在传输结束时,一个停止位表示该次传输信息
的终止。按照惯例,空闲(没有传送数据)的线路实际携带着一个代表二进制1的信号,异步传输的开始位使信号变成0,其他的比特位使信号随传输的数据信息而变化。最后,停止位使信号重新变回1,该信号一直保持到下一个开始位到达。例如在键盘上数字“1”,按照8比特位的扩展ASCII编码,将发送“00110001”,同时需要在8比特位的前面加一个起始位,后面一个停止位。 异步传输的实现比较容易,由于每个信息都加上了“同步”信息,因此计时的漂移不会产生大的积累,但却产生了较多的开销。在上面的例子,每8个比特要多传送两个比特,总的传输负载就增加25%。对于数据传输量很小的低速设备来说问题不大,但对于那些数据传输量很大的高速设备来说,25%的负载增值就相当严重了。因此,异步传输常用于低速设备。 2. 同步传输(Synchronous Transmission):同步传输的比特分组要大得多。它不是独立地发送每个字符,每个字符都有自己的开始位和停止位,而是把它们组合起来一起发送。我们将这些组合称为数据帧,或简称为帧。 数据帧的第一部分包含一组同步字符,它是一个独特的比特组合,类似于前面提到的起始位,用于通知接收方一个帧已经到达,但它同时还能确保接收方的采样速度和比特的到达速度保持一致,使收发双方