IC-NV 光栅编码器芯片
Rev C1, Page 1/19
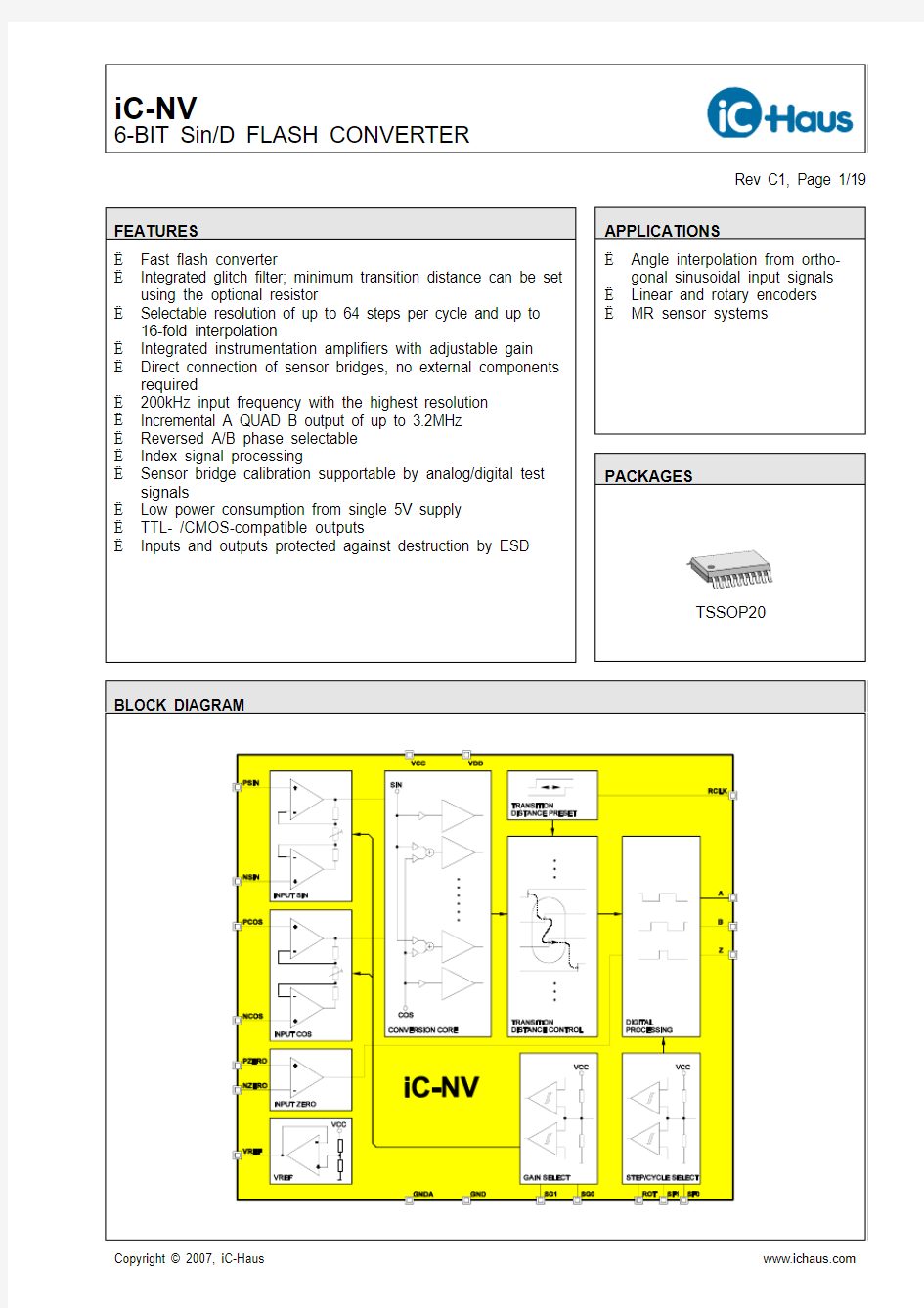
FEATURES APPLICATIONS ?Fast flash converter
?Integrated glitch filter; minimum transition distance can be set using the optional resistor
?Selectable resolution of up to 64 steps per cycle and up to 16-fold interpolation
?Integrated instrumentation amplifiers with adjustable gain ?Direct connection of sensor bridges, no external components required
?200kHz input frequency with the highest resolution ?Incremental A QUAD B output of up to 3.2MHz ?Reversed A/B phase selectable ?Index signal processing
?Sensor bridge calibration supportable by analog/digital test signals
?Low power consumption from single 5V supply ?TTL- /CMOS-compatible outputs
?
Inputs and outputs protected against destruction by ESD
?Angle interpolation from ortho-gonal sinusoidal input signals ?Linear and rotary encoders ?
MR sensor systems
Copyright ? 2007, iC-Haus https://www.360docs.net/doc/f212422766.html,
Rev C1, Page 2/19
DESCRIPTION
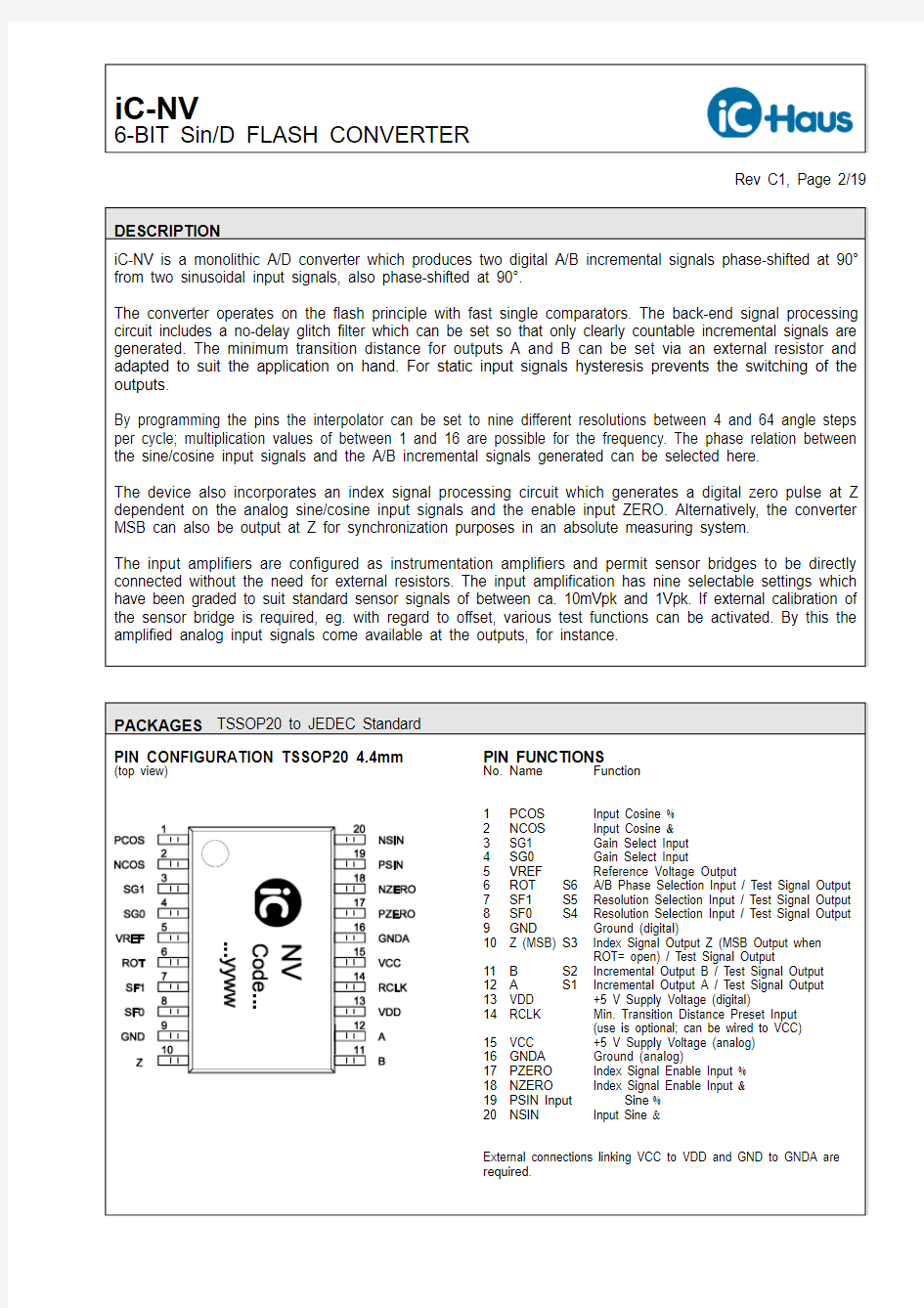
iC-NV is a monolithic A/D converter which produces two digital A/B incremental signals phase-shifted at 90°from two sinusoidal input signals, also phase-shifted at 90°.
The converter operates on the flash principle with fast single comparators. The back-end signal processing circuit includes a no-delay glitch filter which can be set so that only clearly countable incremental signals are generated. The minimum transition distance for outputs A and B can be set via an external resistor and adapted to suit the application on hand. For static input signals hysteresis prevents the switching of the outputs.
By programming the pins the interpolator can be set to nine different resolutions between 4 and 64 angle steps per cycle; multiplication values of between 1 and 16 are possible for the frequency. The phase relation between the sine/cosine input signals and the A/B incremental signals generated can be selected here.
The device also incorporates an index signal processing circuit which generates a digital zero pulse at Z dependent on the analog sine/cosine input signals and the enable input ZERO. Alternatively, the converter MSB can also be output at Z for synchronization purposes in an absolute measuring system.
The input amplifiers are configured as instrumentation amplifiers and permit sensor bridges to be directly connected without the need for external resistors. The input amplification has nine selectable settings which have been graded to suit standard sensor signals of between ca. 10mVpk and 1Vpk. If external calibration of the sensor bridge is required, eg. with regard to offset, various test functions can be activated. By this the amplified analog input signals come available at the outputs, for instance.
Rev C1, Page 3/19
All voltages are referenced to ground unless otherwise noted.
All currents into the device pins are positive; all currents out of the device pins are negative.
ABSOLUTE MAXIMUM RATINGS
Values beyond which damage may occur; device operation is not guaranteed.Item
Symbol
Parameter
Conditions
Fig.
Unit
Min.
Max.G001VCC Supply Voltage analog -0.36V G002VDD Supply Voltage digital
-0.36V G003V()
Voltage at
NSIN, PSIN, NCOS, PCOS, NZERO,PZERO, SG1, SG0, RCLK SF1, SF0, ROT, A, B, Z V() < VCC+0.3V V() < VDD+0.3V -0.3
6
V G004Imx(VCC)Current in VCC -5050mA G005Imx(GNDA)Current in GNDA
-5050mA G006Imx(VDD)Current in VDD -5050mA G007Imx(GND)Current in GND
-5050mA G008Imx()
Current in
NSIN, PSIN, NCOS, PCOS,
NZERO, PZERO, SG1, SG0, VREF,RCLK, SF1, SF0, ROT, A, B, Z -10
10
mA
G009Ilu()Pulse Current in all pins (Latch-up strength)
pulse duration < 10μs
-100100mA EG1Vd()ESD Susceptibility at all pins 100pF discharged through 1.5k ?
2kV TG1Tj Operating Junction Temperature -40150°C TG2Ts
Storage Temperature Range
-40
165
°C
THERMAL DATA
Operating Conditions: VCC= VDD= 5V ±10%Item Symbol Parameter
Conditions
Fig.
Unit
Min.Typ.
Max.T1
Ta
Operating Ambient Temperature Range
(extended temperature range of -40 to 125 °C available on request)
-25
85
°C
Rev C1, Page 4/19 ELECTRICAL CHARACTERISTICS
Operating Conditions: VCC= VDD= 5V ±10%, Tj= -40..125°C, unless otherwise noted
Item Symbol Parameter Conditions Tj Fig.Unit
°C Min.Typ.Max.
Total Device
001VCC,
VDD
Permissible Supply Voltage 4.5 5.5V 002I(VCC)Supply Current in VCC fin()= 200kHz; A, B, Z open15mA 003I(VDD)Supply Current in VDD fin()= 200kHz; A, B, Z open5mA 004Von Power-On Reset Threshold2 3.8V 005Voff Power-Down Reset Threshold1 2.2V 006Vhys Power-On Reset Hysteresis0.4 1.8V
007Vc()hi Clamp Voltage hi at
NSIN, PSIN, NCOS, PCOS,
NZERO, PZERO, SG1, SG0,
ROT, SF1, SF0, VREF, RCLK Vc()hi= V() -VCC;
I()= 1mA, other pins open
0.3 1.6V
008Vc()lo Clamp Voltage lo at
NSIN, PSIN, NCOS, PCOS,
NZERO, PZERO, SG1, SG0,
ROT, SF1, SF0, VREF, RCLK, A,
B, Z
I()= -1mA, other pins open-1.5-0.3
009Vc()hi Clamp Voltage hi at
A, B, Z Vc()hi= V()-VDD;
I()= 1mA, other pins open
0.3 1.6V
Input Amplifiers NSIN, PSIN, NCOS, PCOS
101Vos()Input Offset Voltage Vin() see table gain select
GAIN= 10..66 GAIN= 3..7.1
-7
-10
7
10
mV
mV
102Iin()Input Current V()= 0V.. VCC-5050nA 103G()Gain GAIN following table gain select95101% 104Grel Gain Ration SIN/COS GAIN following table gain select98102%
105fhc Cut-off Frequency GAIN= 66.667
GAIN= 3.03500
2.3
kHz
MHz
106SR Slew Rate GAIN= 66.667
GAIN= 3.0310
15
V/μs
V/μs
Signal Processing: Converter Accuracy
201AAabs Absolute Angle Accuracy referred to 360° input signal,
GAIN= 3.03;
VPin= 2...2.6 Vpp, VNin= 2.5 Vdc VPin= 1...1.3 Vpp, VNin= 2.5 Vdc -1
-2
1
2
DEG
DEG
202AArel Relative Angle Accuracy referred to period of A, B
GAIN= 3.03
7-1010% VREF
401V(VREF)Reference Voltage at VREF I(VREF)= -1mA..+1mA4852%VCC Signal Processing: Transition Distance Control
501RCLK Permissible Resistor at
RCLK vs. GNDA DIV= 1 (IPF= 10, 12, 16)
DIV= 2 (IPF= 5, 8)
DIV= 4 (IPF= 3, 4)
DIV= 8 (IPF=2)
DIV= 16 (IPF= 1)
47
23
12
6
3
500
500
500
500
500
k?
k?
k?
k?
k?
502DT()Minimum Transition Distance R(RCLK, GNDA)= 47K? 1%;
DIV= 1 DIV= 164
2
45
490
78
1000
ns
ns
503DT()Minimum Transition Distance V(RCLK)= VCC;
DIV= 1 DIV= 16
30
420
78
1000
ns
ns
Rev C1, Page 5/19
ELECTRICAL CHARACTERISTICS
Operating Conditions: VCC= VDD= 5V ±10%, Tj= -40..125°C, unless otherwise noted Item
Symbol
Parameter
Conditions
Tj Fig.
Unit
°C
Min.
Typ.
Max.
Fig. 1: Adjusting the minimum transition distance via resistor RCLK (given typical at 5V, 27°C; for
IPF= 1 within 5V ±10% and -40..+125°C ranges).Fig. 2: Similar to Figure 1; the minimum transition distance can be reduced by smaller resistors RCLK.
Zero Comparator 701Vos()Input Offset Voltage V()= Vcm()-2020mV 702Iin()Input Current
V()= 0V.. VCC
-50
50nA 703Vcm()Common-Mode Input Volt. Range 1.4VCC-1.5V 704Vdm()Differential Input Voltage Range 0VCC V Signal Processing: Inputs SG1, SG0, ROT, SF1, SF0
801Vt()hi Input Threshold Voltage hi 6078%VCC 802Vt()lo Input Threshold Voltage lo 2540%VCC 803V0()Mid Level Voltage 4357%VCC 804
Ri()
Input Resistance 45
150220k ? Signal Processing: Outputs A, B, Z D01Vs()hi Saturation Voltage hi Vs()hi= VDD-V(); I()= -4mA 0.4V D02Vs()lo Saturation Voltage lo I()= 4mA 0.4V D05tr()Rise Time CL()= 50pF 60ns D06tf()
Fall Time
CL()= 50pF 60
ns
ELECTRICAL CHARACTERISTICS: Diagrams
Rev C1, Page 6/19
Fig. 3: Adjusting the minimum transition distance via resistor RCLK.Fig. 4: Similar to Figure 3; minimum transition distance for smaller RCLK resistor values.
Fig. 5: Temperature drift of the minimum transition distance versus 27°C (VDD= 5V).Fig. 6: Temperature drift of the reduced minimum transition distance versus 27°C (VDD= 5V).
Fig. 7: Definition of the relative angle accuracy.
Rev C1, Page 7/19 DESCRIPTION OF FUNCTIONS
Input Amplifiers
Input stages SIN and COS are configured as instrumentation amplifiers. The gain is dependent on the amplitude of the input signal and set via pins SG0 and SG1 according to the following table. So that the DC level to be adjusted half of the supply voltage is available at VREF.
GAIN SELECT
SG1SG0Gain
Sine/Cosine Input Signal Levels Vin()
Amplitude Average value (DC) differential single ended differential single ended
hi hi66.667up to 60mVpp up to 120mVpp0.7V .. VCC-1.2V0.7V .. VCC-1.2V
hi open50.000up to 80mVpp up to 160mVpp0.7V .. VCC-1.2V0.7V .. VCC-1.2V
hi lo33.333up to 120mVpp up to 240mVpp 1.2V .. VCC-1.2V 1.2V .. VCC-1.3V
open hi20.000up to 0.2Vpp up to 0.4Vpp 1.2V .. VCC-1.2V 1.2V .. VCC-1.3V
open open14.300up to 0.28Vpp up to 0.56Vpp0.7V .. VCC-1.3V0.8V .. VCC-1.4V
open lo10.000up to 0.4Vpp up to 0.8Vpp 1.2V .. VCC-1.3V 1.3V .. VCC-1.5V
lo hi7.125up to 0.56Vpp up to 1.1Vpp 1.2V .. VCC-1.4V 1.4V .. VCC-1.7V
lo open 4.000up to 1Vpp up to 2Vpp 1.2V .. VCC-1.6V 1.6V .. VCC-2.1V
lo lo 3.030up to 1.3Vpp up to 2.6Vpp 1.2V .. VCC-1.7V 1.8V .. VCC-2.4V
Converter Core, Transition Distance Control
For each of the 64 comparator levels the sine/cosine input signals are calculated according to the theorem of addition and are fed into single comparators. This procedure guarantees a very high converter frequency yet also means that consecutive comparators can switch in a very short space of time in the event of input signal disturbances.
The comparator outputs are thus fed into a transition distance control unit. This monitors the temporal sequence of the switching operations in such a way that each event is delayed by the length of the settable minimum gap to the previous event. If no errors arise the transitions pass the control unit without a time delay. Synchronization with a fixed clock pulse does not occur.
The minimum transition distance is set via an external resistor positioned between RCLK and GNDA. Alterna-tively, pin RCLK can be shorted to VCC. Depending on the resolution maximum input frequencies of at least 200kHz are then guaranteed (see table of resolution).
Digital Processing Unit
The transition distance control unit is followed by the digital processing unit. This is where the transition events are converted into a pulse sequence for the incremental outputs A and B. The square-wave signals generated have a phase shift of +90° or -90°, depending on the direction of rotation. The phase relation between the sine/cosine input signals and the A/B output signals can be set using programming pin ROT.
Alternatively, the MSB of the converter can be output to Z when ROT is high. With the zero signal this changes to high and has the pulse length of half a cycle. This signal can be used to synchronize the high-order tracks of an absolute-value encoder device.
Rev C1, Page 8/19
A/B OUTPUT PHASE SELECTION
ROT Input signals Output signals A, B; Z
lo positive; COS leading SIN B leading A; Z
lo negative; SIN leading COS A leading B; Z
open positive; COS leading SIN B leading A; MSB
open negative; SIN leading COS A leading B; MSB
hi positive; COS leading SIN A leading B; Z
hi negative; SIN leading COS B leading A; Z
Resolution, frequency ranges
Nine different resolutions or interpolation factors (IPF) can be programmed via inputs SF0 and SF1. Resolutions 16, 12 and 10 are generated at the core of the converter itself. Resolutions of less than 10 are produced by division DIV in the digital processing unit. The minimum transition distance at outputs A and B corresponds to that of the transition distance control multiplied by the divisor of the digital processing unit.
The minimum output transition distance (maximum output frequency) should be adjusted to tarry with the overall system (bandwidth of the transfer medium, sampling rate of the counter). The maximum input frequency is determined by the transition distance control and the resolution of the converter core (16, 12 or 10). This frequency can be increased for resolutions of less than 10 with an external resistor at RCLK. The following table gives possible settings.
RESOLUTION
SF1SF0IPF DIV
internal
division fin
MAX
fin
MAX
for RCLK= VCC
or RCLK= 47 k?
hi hi161200 kHz, RCLK= 47 k?200 kHz hi open121260 kHz, RCLK= 47 k?260 kHz hi lo101320 kHz, RCLK= 47 k?320 kHz open hi82400 kHz, RCLK= 23 k?200 kHz open open52640 kHz, RCLK= 23 k?320 kHz open lo44800 kHz, RCLK= 12 k?200 kHz lo hi34 1.04 MHz, RCLK= 12 k?260 kHz lo open28 1.6 MHz, RCLK= 6 k?200 kHz lo lo116(3.2 MHz), RCLK= 3 k?200 kHz
Rev C1, Page 9/19 Hysteresis
iC-NV has an angular hysteresis which is independent of the input amplitude and phase. It prevents the outputs from switching when the inputs are static. The following diagram shows the effect this has with an interpolation
factor of 8..
When the direction of rotation is reversed the integrated hysteresis circuit prompts the change in direction to be signaled at the outputs; the hysteresis causes a delay here. According to the resolution the hysteresis is set to one of the following fixed values.
ANGLE HYSTERESIS
Interpolation factor123458101216
Hysteresis DEG5,625°5,625°7,5°5,625°9°5,625°9°7,5°5,625°referred to
A/B period
1/641/321/161/161/81/81/41/41/4
Zero pulse
One zero pulse (index) is generated per cycle from the sine/cosine inputs. To be output to Z it must be enabled by the comparator at differential inputs PZERO and NZERO. The width of the zero pulse is a quarter of the length of the A and/or B signal output cycle. When Z is high, simultaneously A&B are high. The position of the zero pulse dependent on the interpolation factor and the direction of rotation is given in the following table.
INDEX POSITION
IPF
positive direction
of rotation
negative direction
of rotation
1645°.. 50,625°39,375° .. 45°
1245°.. 52,5°37,5° .. 45°
1045°.. 54°36° .. 45°
839,375°.. 50,625°33,75° .. 45°
536° .. 54°27° .. 45°
433,75° .. 56,25°28,125° .. 50,625°
330°.. 60°22,5° .. 52,5°
222,5 .. 67,5°16,875° .. 61,875°
10° .. 90°354,375° .. 84,625°
Rev C1, Page 10/19
Fig. 9: ROT= lo/open, COS leading SIN
Fig. 11: ROT= hi, COS leading SIN
Fig. 10: ROT= lo/open, SIN leading COS
Fig. 12: ROT= hi, SIN leading COS
Oscilloscope diagrams
The following diagrams give the input and output signals for various directions of rotation and ROT settings for interpolation factors 1 and 16.
Rev C1, Page 11/19 Test functions
Device iC-NV features internal test functions which can be used to ease sensor bridge calibration procedures if such are required. To enable test operation, a threshold current of approx. 1mA present at pin RCLK must be exceeded during power up. Subsequently, four different test modes are selectable starting with mode 3 set initially.
Fig. 13: Activating test functions via pin RCLK.
Rev C1, Page 12/19 Description of test signals
MODE 3
ZK un-gated index/zero comparator output EXKA all comparators EXOR-gated
SIN, NSIN, COS, NCOS
amplifier outputs (signal valid with no load
only)
MODE 0
KA(0)Comparator 0°-180°
Duty cycle indicates offset of sine signal. KA(16)Comparator 90°-270°
Duty cycle indicates offset of cosine sig-
nal.
KA(X):KA(8) EXOR KA(24)
Comparator 45°-225°
Duty cycle indicates amplitude ratio of
sine/cosine signal. Offset calibration must
be performed first.MODE 1
CLK, UP, DN
Control signals for external counters. MODE 2
NENOS, CLK, DALL
Test signals for iC-Haus device test.
Rev C1, Page 13/19
Fig. 14: Input circuit for voltage signals of 1Vpp with no ground reference. When grounds are not separa-
ted the connection NSIN to VREF must be omitted.
Fig. 15: Input circuit for current signals of 11μA. In
this circuit offset adjustment is not possible.
source signals with ground reference (adaptation via
resistors R3, R4).
Fig. 17: Simplified input wiring for single-side voltage
signals with ground reference.
Fig. 18: Input circuit for differential current sink sensor outputs, eg. using Opto Encoder iC-WG.
APPLICATIONS INFORMATION Principal Input Circuits
Rev C1, Page 14/19
Fig. 19: Wiring scheme with offset adjustment possi-bility; the resistor values must be selected with re-spect to the photo currents available (eg. 65k ? for max. 16μApk at GAIN= 3, or 1μA at GAIN= 50
respectively).
Fig. 20: Additional adjustment possibility for ampli-
tude differences; settings at P3 must be done first.
Wiring photodiode arrays with common cathodes
Rev C1, Page 15/19
Fig. 22: Wiring scheme with offset adjustment possi-bility; the resistor values must be selected with
respect to the photo currents available (eg. 65k ? for max. 16μA pk at GAIN= 3, or 1μA at GAIN= 50
respectively).
Fig. 23: Additional adjustment possibility for ampli-
tude differences; settings at P3 must be done first.
Fig. 24: Wiring MR sensor bridges with offset adjust-ment possibility; setup pins remaining open can be
linked to VREF to enhance interference immunity.
Fig. 25: Wiring MR half-bridge sensors with offset adjustment possibility.
Wiring photodiode arrays with common anodes
Wiring magneto-resistor bridge sensors
Rev C1, Page 16/19 MR Sensor System Application Example
regulator combo iC-WD and line driver iC-WE, enabling data transmission via 100m cable length. The maximum output frequency is limited to approx. 280kHz by R1= 500k? to comply with speed-limited external counters (pins SF1 and SF0 are open and select IPF= 5). C7/C8 can help to improve noise immunity additionally, for instance with motor applications.
Rev C1, Page 17/19
assembly; the corresponding switch must remain set to high).
DEMO BOARD
The iC-NV device is equipped with a Demo Board for test purposes. Figures 10 to 12 show the wiring as well as the top and bottom layout of the test PCB.
Rev C1, Page 18/19 This specification is for a newly developed product. iC-Haus therefore reserves the right to change or update, without notice, any information contained herein, design and specification; and to discontinue or limit production or distribution of any product versions. Please contact iC-Haus to ascertain the current data. Copying – even as an excerpt – is only permitted with iC-Haus approval in writing and precise reference to source.
iC-Haus does not warrant the accuracy, completeness or timeliness of the specification on this site and does not assume liability for any errors or omissions in the materials. The data specified is intended solely for the purpose of product description. No representations or warranties, either express or implied, of merchantability, fitness for a particular purpose or of any other nature are made hereunder with respect to information/specification or the products to which information refers and no guarantee with respect to compliance to the intended use is given. In particular, this also applies to the stated possible applications or areas of applications of the product.
iC-Haus conveys no patent, copyright, mask work right or other trade mark right to this product. iC-Haus assumes no liability for any patent and/or other trade mark rights of a third party resulting from processing or handling of the product and/or any other use of the product.
As a general rule our developments, IPs, principle circuitry and range of Integrated Circuits are suitable and specifically designed for appropriate use in technical applications, such as in devices, systems and any kind of technical equipment, in so far as they do not infringe existing patent rights. In principle the range of use is limitless in a technical sense and refers to the products listed in the inventory of goods compiled for the 2007 export trade statistics issued by the Bureau of Statistics in Wiesbaden in December 2006, for example, or to any product in the product catalogue published for the 2007 exhibition in Hanover (Hannover-Messe).
We understand suitable application of our published designs to be state-of-the-art technology which can no longer be classed as inventive under the stipulations of patent law. Our explicit application notes are to be treated only as mere examples of the many possible and extremely advantageous uses our products can be put to.
Rev C1, Page 19/19 ORDERING INFORMATION
Type Package Order designation
iC-NV Demo Board TSSOP20 4.4mm iC-NV TSSOP20
EVAL NV1D
For technical support, information about prices and terms of delivery please contact: iC-Haus GmbH Tel +49-6135-9292-0
Am Kuemmerling 18Fax+49-6135-9292-192
D-55294 Bodenheim https://www.360docs.net/doc/f212422766.html,
GERMANY E-mail sales@https://www.360docs.net/doc/f212422766.html,
Appointed local distributors: http://www.ichaus.de/support_distributors.php
编码器基础知识大全
编码器 科技名词定义 中文名称: 编码器 英文名称: coder;encoder 定义: 一种按照给定的代码产生信息表达形式的器件。 应用学科: 通信科技(一级学科);通信原理与基本技术(二级学科)以上内容由全国科学技术名词审定委员会审定公布 编码器 编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺.按照读出方式编码器可以分为接触式和非接触式两种.接触式采用电刷输出,一电
刷接触导电区或绝缘区来表示代码的状态是"1”还是“0”;非接触式的接受敏感元件是光敏元件或磁敏元件,采用光敏元件时以透光区和不透光区来表示代码的状态是"1”还是"0”,通过"1”和“0”的二进制编码来将采集来的物理信号转换为机器码可读取的电信号用以通讯、传输和储存。 作用 设计图纸 利用电磁感应原理将两个平面型绕组之间的相对位移转换成电信号的测量元件,用于长度测量工具。感应同步器(俗称编码器、光栅尺)分为直线式和旋转式两类。前者由定尺和滑尺组成,用于直线位移测量;后者由定子和转子组成,用于角位移测量。1957年美国的R.W.特利普等在美国取得感应同步器的专利,原名是位置测量变压器,感应同步器是它的商品名称,初期用于雷达天线的定位和自动跟踪、导弹的导向等。在机械制造中,感应同步器常用于数字控制机床、加工中心等的定位反馈系统中和坐标测量机、镗床等的测量数字显示系统中。它对环境条件要求较低,能在有少量粉尘、油雾的环境下正常工作。定尺上的连续绕组
的周期为2毫米。滑尺上有两个绕组,其周期与定尺上的相同,但相互错开1/4周期(电相位差90°)。感应同步器的工作方式有鉴相型和鉴幅型的两种。前者是把两个相位差90°、频率和幅值相同的交流电压U1 和U2分别输入滑尺上的两个绕组,按照电磁感应原理,定尺上的绕组会产生感应电势U。如滑尺相对定尺移动,则U的相位相应变化,经放大后与U1和U2比相、细分、计数,即可得出滑尺的位移量。在鉴幅型中,输入滑尺绕组的是频率、相位相同而幅值不同的交流电压,根据输入和输出电压的幅值变化,也可得出滑尺的位移量。由感应同步器和放大、整形、比相、细分、计数、显示等电子部分组成的系统称为感应同步器测量系统。它的测长精确度可达3微米/1000毫米,测角精度可达1″/360°。 分类 按照工作原理编码器可分为增量式和绝对式两类。 增量式 增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。 绝对式
编码器详细介绍与编程指导
增量型编码器与绝对型编码器的区分 编码器如以信号原理来分,有增量型编码器,绝对型编码器。 增量型编码器 (旋转型) 工作原理: 由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。 由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。 编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。 分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。 信号输出: 信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL 也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。 信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。 如单相联接,用于单方向计数,单方向测速。 A.B两相联接,用于正反向计数、判断正反向和测速。 A、B、Z三相联接,用于带参考位修正的位置测量。 A、A-, B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。 对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。 对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。
编码器类来料检验标准(6)
一、目的 建立和规范适当之检验流程、检验方法,以使检验结果具有环保性和全面性以及准确性。 二、范围 适用于本公司所有符合产品的编码器类之进料检验。 三、权责单位 1. 本检验规范由品管部制定并核准后发行。 2. 所制定之规格,如有修改时,须经原核准单位同意后修改之。 四、参考文件 4.1 抽样计划 4.2 承认书 4.3环保测试报告、使用环保材料保证书 4.4产品的监视和测量控制程序. 五、 检验计划 5.1品质检验计划 5.1.1 批之构成:以一次送验量为单位检查批 5.1.2 抽验计划:依MIL-STD-105E 计数值抽样计划实施单次抽样 5.1.3 检验水准:一般检验水准采用Ⅱ级 特殊检验(S-2) 5.1.4 AQL 抽样标准:(Ⅱ级) 严重缺点:CR ——0 主要缺点:MA ——0.4 次要缺点:MI ——1.0 六、检验设备 6.1 游标卡尺 6.2 万用表 6.3编码器测试治具 七、定义(略) 八、环保测试: 鼎品科技有限公司 文件编号 DP-PG-SI-004 版本 V.1.0 文件名称 编码器类来料检验标准 生效日期 制定 沈国正/2014/3/18 审核 批准
8.1.验证供应商是否提供SGS 报告。 九、缺点判定标准 十、记录 10.1将检验结果记录在来料检验报告上。 10.2在物料标签上加盖判定章。 制定 沈国正/2014/3/18 审核 批准 序号 检验项目 缺点说明 缺点别 MA MI 1 一般检验 送料件与《验收入库单》核对,实物与料号不相符。 √ 2 外观检验 1.无环保测试报告. √ 2.无环保料号 √ 3.外包装无环保标识或标签. √ 4.端子与金属弹片有锈迹. √ 5.PIN 脚变形. √ 6.与工程样品对比不相符. √ 3 尺寸检验 脚距:与工程样品不相符. √ 4 电气测试 1.段落感与样品不相符. √ 2.转动时出现有杂音. √ 3.与工程承认样品对比不相符. √ 5 上锡试验 PIN 脚上锡度不良. √ 6 寿命测试 装入测试机内以36次/分。来回360°旋转10万次 后测试功能不正常 √
编码器工作原理及作用
编码器工作原理及作用-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
编码器工作原理及作用 工作原理 德国siko编码器 由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。 由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。 分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。 作用 它是一种将旋转位移转换成一串数字脉冲信号的旋转式传感器,这些脉冲能用来控制角位移,如果编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。 编码器产生电信号后由数控制置CNC、可编程逻辑控制器PLC、控制系统等来处理。这些传感器主要应用在下列方面:机床、材料加工、电动机反馈系统以及测量和控制设备。在ELTRA编码器中角位移的转换采用了光电扫描原理。读数系统是基于径向分度盘的旋转,该分度由交替的透光窗口和不透光窗口构成的。此系统全部用一个红外光源垂直照射,这样光就把盘子上的图像投射到接收器表面上,该接收器覆盖着一层光栅,称为准直仪,它具有和光盘相同的窗口。接收器的工作是感受光盘转动所产生的光变化,然后将光变化转换成相应的电变化。一般地,旋转编码器也能得到一个速度信
h.264的编码过程
H.264编码算法的实现 在H.264编码具体实现过程中,采用了目前国际上应用最广泛的开源编码器X.264作为实现的基础。X.264和JM系列编码器、T.264编码器相比有着优秀的性能和出色效果。由于X.264没有提供直接的开发API,所以在本系统中的编码部分重新封装了X.264的编码API,便于软件系统的设计和使用。以下是本系统中H.264编码的具体实现过程: 1) RGB和YUV颜色空间的转换 在系统中通过Logitech摄像头获得的视频数据为RGB24格式,但是X.264的输入流为标准的YUV(4:2:0)的图像子采样格式。因此,在编码前需要将RGB颜色空间转换为YUV的颜色空间。实现的函数调用有InitLookupTable()用于初始化色彩空间转换; RGB2YUV420(int x_dim, int y_dim, unsigned char *bmp, unsigned char *yuv, int flip);用于实际的转换。由于人眼的生理特性,经过图像子采样后,实际的图像大小已经减小为采样前的1.5个样本点,即减小了一半的数据量。 2) 设置H.264编码参数 使用x264_param_default(x264_param_t *param)对当前需要编码的图像参数进行设置。包括数据帧数量(param .i_frame_total)、采样图像的长宽度和高度(param .i_width,param .i_height)、视频数据比特率(param .rc.i_bitrate) 、视频数据帧率(param .i_fps_num)等参数进行设置,以完成编码前预设置。 3) 初始化编码器 将上步中的设置作为编码器初始化的参数, x264_t*x264_encoder_open ( x264_param_t *param )。如果初始化失败将返回NULL,在这里需要对编码器初始化结果进行处理。 4) 分配编码空间 如果编码器初始化成功,则需要为本次处理分配内存空间 Void x264_picture_alloc(x264_picture_t *pic, int i_csp, int i_width, int i_height)。 5) 图像编码 将以上步骤初始化后的数据作为编码输入,使用下面的方法进行编码: int x264_encoder_encode( x264_t *h,x264_nal_t **pp_nal, int *pi_nal,x264_picture_t *pic_in,x264_picture_t *pic_out );
海德汉编码器和海德汉光栅尺使用的各种参数
海德汉 海德汉编码器和海德汉光栅尺使用的各种参数 10 编程:Q参数
10.1原理和概述 你可以在一个零部件加工程序中编写同类零部件的程序,你只须输入称作Q参数的变量取代固定的数字值即可。 Q参数可以代表诸如以下的信息: □坐标值 □进给率 □RPM(重复数/分) □循环数据 Q参数也可以帮助你编写通过数学功能定义的外形轮廓。同时,你也可以使用Q参数根据逻辑状况执行机械加工步骤。与FK编程连用,可以将无法NC-兼容的外形轮廓与Q参数结合。 Q参数由字母Q和0到299之间的一个数字命名。其分组情况分为三类: 含义范围 普遍适用参数,适用于所有TNC内存 记忆的程序 Q0到Q99 为特殊TNC功能设定的参数Q100到Q199 主要用于循环的参数,适用于所有存 储在TNC内存中的程序 Q200到Q399 编程说明 在一个程序中可以混用Q参数和固定数字值。 Q参数可以被指定给-99.999,9999和+99 999.9999之间的数字值。TNC可以计算十进制小数点前57位到小数点后7位的范围(32位数据的计算范围相当于十进制数值4 294 967 296)。 一些Q参数总是被TNC指定给同样的数 据。例如,Q108总是被指定给当前刀具半 径,可参见368页的“预先指定Q 参数”。 如果你在OEM循环中使用Q60至Q99之间 的参数,须通过MP7251定义这些参数是 否仅用于OEM循环,还是全部适用。 338
调用Q参数功能 在编写零部件加工程序时,按下“Q”键(位于数字值输入 键盘,-/+键的下方)。然后,TNC会显示以下软键盘: 功能组软键盘 基础算术(指定,加减乘除,平方根) BASIC ARITHM. 三角函数功能TRIGO- NOME TRY 计算循环功能CIRCLE CALCU- LATION 如果/则条件,转移JUMP 其它功能DIVERSE FUNCTION 直接输入公式FORMULA 339
编码器工作原理及特点介绍
1. 编码器的特点及用途 编码器是通过把机械角度物理量的变化转变成电信号的一种装置;在传感器的分类中,他归属于角位移传感器。 根据编码器的这一特性,编码器主要用于测量转动物体的角位移量,角速度,角加速度,通过编码器把这些物理量转变成电信号输出给控制系统或仪表,控制系统或仪表根据这些量来控制驱动装置。 2. 编码器的主要应用场合: 2.1数控机床及机械附件。 2.2 机器人、自动装配机、自动生产线。 2.3 电梯、纺织机械、缝制机械、包装机械(定长)、印刷机械(同步)、木工机械、塑料机械(定数)、橡塑机械。 2.4 制图仪、测角仪、疗养器雷达等。 最常用的有两种:绝对值编码器和增量式编码器。 信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。 传感器电源电压一般分为:5V和24V。信号类型: 1、A/B/Z型 2、RS422差分 3、SSI(格雷码) 信号有正弦波的,有方波的。 信号有电流型的,有电压型的 另外SSI编码器输出除了格雷码,也有二进制码的。电压的范围也不仅限于5V和24V 3. 基本原理
3.1 构造 编码器主要是由码盘(圆光栅、指示光栅)、机体、发光器件、感光器件等部件组成。 (1)圆光栅是由涂膜在透明材料或刻画在金属材料上的成放射状的明暗相间的条纹组成的。一个相邻条纹间距称为一个栅节,光栅整周栅节数就是编码器的脉冲数(分辨率)。(注:本公司码盘有三种金属、玻璃、菲林(类似塑料) 三种)。 (2)指示光栅是一片固定不动的,但窗口条纹刻线同圆光栅条纹刻线完全相同的光栅片。 (3)机体是装配圆光栅,指示光栅等部件的载体。 (4)发光器件一般是红外发光管。 (5)感光器件是高频光敏元件;一般有硅光电池和光敏三极管。 3.2 工作原理 由圆光栅和指示光栅组成一对扫描系统,在扫描系统的一侧投射一束红外光,在扫描系统的另一侧的感光器件就可以收到扫描光信号;当圆光栅转动时,感光器件接收到的扫描光信号会发生变化,感光器件可以把光信号转变成电信号并输出给控制系统或仪表。 一般编码器的输出信号为两列成90度相位差的Sin信号和Cos信号(这是由指示光栅的窗口条纹刻线保证的);这些信号的周期等于圆光栅转过一个栅节(P)的移动时间,对Sin信号和Cos信号进行放大及整形就可输出方波脉冲信号。 4. 应用举例 编码器的应用场合十分的广泛,在此列举几个简单事例: (1) 数控机床对加工工件自动检测就是通过编码器来进行检测的:数控机床刀架的对零校准也是通过编码器来实施的。 (2) 编码器在PLC上的应用:一般PLC上都有高速信号输入口,编码器可以作为高速信号输入元件,使PLC更加迅速和精准地实施闭环控制。而在变频器上其一般接变频器的PG卡上。
编码器标定过程
标定现场编码器 因为现场编码器所使用地点不同,标定方法不尽相同,但原理相同。此处以轧机入口侧导板 编码器为例讲解。所谓标定是指对图1中红线框中的数值进行设定使得现场的位移变化量与 程序中的位移变化量相同(误差允许范围内)。标定后的值记为β,标定前的经验值记为α。 图1 1.程序中设定 ?现在程序中对所标定参数进行设定(经验值)。 ?设定位置如图2红线框所示 图2 设定值与图2中的蓝线框中的数值有关,如果是蓝线框是100则红线框为两位数, 如果蓝线框是1000则红线框为三位数,设定方法为双击,在对话框中Device栏中 进行输入数值。此处经验值为140记为α。 2.现场测量 ?在现场设备上确定一个测量的基准点(用胶带贴在设备上,在上划线作为每次测量的基准) ?移动现场设备,先进行一次点动,移动量不用很大确保以后的移动方向与此次点动方向相同(减小误差) ?移动现场设备,测量移动距离,记录为L1(473mm) ?在程序中查看程序中的移动量,查看位置如图红线框所示(有多处与此处数值相同)。 记录为S1(565.7mm)。
?再次移动现场设备(与上次方向相同)测量移动距离记录为L2(599mm)。 ?再此查看程序相同位置记录数据为S2(726.8mm)。 3.计算 ①ΔL=|L2‐L1|=126mm ②ΔS=|S2‐S1|=161.1mm ③β=ΔL÷ΔS×α=109.49 经过计算β值为109.49,现场实际测量不免有误差,多测几组(测量计算方法相同) 进行比较,得出最后结果此处给出结果β值为110。 4.验证 让设备移动较大距离(尽量减小误差),测得L1、S1、L2、S2,计算得出ΔL、ΔS比较 俩数值是否相同(误差允许范围)因为现场测量工具粗糙,此处认为误差在0.1mm即 为相同。
光栅尺和编码器介绍
光栅与编码器介绍 位置检测装置作为数控机床的重要组成部分,其作用就是检测位移量,并发出反馈信号与数控装置发出的指令信号相比较,若有偏差,经放大后控制执行部件使其向着消除偏差的方向运动,直至偏差等于零为止。为了提高数控机床的加工精度,必须提高检测元件和检测系统的精度。其中以编码器,光栅尺,旋转变压器,测速发电机等比较普遍,下面主要对光栅和编码器进行说明。 光栅,现代光栅测量技术 简要介绍: 将光源、两块长光栅(动尺和定尺)、光电检测器件等组合在一起构成的光栅传感器通常称为光栅尺。光栅尺输出的是电信号,动尺移动一个栅距,输出电信号便变化一个周期,它是通过对信号变化周期的测量来测出动就与定就职相对位移。目前使用的光栅尺的输出信号一般有两种形式,一是相位角相差90度的2路方波信号,二是相位依次相差90度的4路正弦信号。这些信号的空间位置周期为W。下面针对输出方波信号的光栅尺进行了讨论,而对于输出正弦波信号的光栅尺,经过整形可变为方波信号输出。输出方波的光栅尺有A相、B 相和Z相三个电信号,A相信号为主信号,B相为副信号,两个信号周期相同,均为W,相位差90o。Z信号可以作为较准信号以消除累积误差。 一、栅式测量系统简述 从上个世纪50年代到70年代栅式测量系统从感应同步器发展到光栅、磁栅、容栅和球栅,这5种测量系统都是将一个栅距周期内的绝对式测量和周期外的增量式测量结合了起来,测量单位不是像激光一样的是光波波长,而是通用的米制(或英制)标尺。它们有各自的优势,相互补充,在竞争中都得到了发展。由于光栅测量系统的综合技术性能优于其他4种,而且制造费用又比感应同步器、磁栅、球栅低,因此光栅发展得最快,技术性能最高,市场占有率最高,产业最大。光栅在栅式测量系统中的占有率已超过80%,光栅长度测量系统的分辨力已覆盖微米级、亚微米级和纳米级,测量速度从60m/min,到480m/min。测量长度从1m、3m 达到30m和100m。 二、光栅测量技术发展的回顾 计量光栅技术的基础是莫尔条纹(Moire fringes),1874年由英国物理学家L.Rayleigh首先提出这种图案的工程价值,直到20世纪50年代人们才开始利用光栅的莫尔条纹进行精密测量。1950年德国Heidenhain首创DIADUR复制工艺,也就是在玻璃基板上蒸发镀铬的光刻复制工艺,这才能制造高精度、价廉的光栅刻度尺,光栅计量仪器才能为用户所接受,进入商品市场。1953年英国Ferranti公司提出了一个4相信号系统,可以在一个莫尔条纹周期实现4倍频细分,并能鉴别移动方向,这就是4倍频鉴相技术,是光栅测量系统的基础,并一直广泛应用至今。 德国Heidenhain公司1961年开始开发光栅尺和圆栅编码器,并制造出栅距为4μm(250线/mm)的光栅尺和10000线/转的圆光栅测量系统,能实现1微米和1角秒的测量分辨力。1966年制造出了栅距为20μm(50线/mm)的封闭式直线光栅编码器。在80年代又推出AURODUR工艺,是在钢基材料上制作高反射率的金属线纹反射光栅。并在光栅一个参考标
国内常用国外的编码器种类及品牌
国内常用编码器种类及品牌 编码器(xx高端): 海德汉Heidenhain(德国),编码器第一品牌。 倍加福P+F(德国),各类常用编码器,占有一定中国市场。 霍勒Hohner (德国,西班牙),编码器第二大生产厂商。RESATRON(德国),脉冲可达1000PPR,多圈至29BIT。 亨士乐Hengstler (德国),钢铁行业,化工行业等。 霍普纳Hubner-berlin(德国),中高端级应用,价格较高。 霍普纳Hubner-giessen(德国),重工行业,适用恶劣环境。 施克STEGMANN(德国),主要用于机床、电机回馈系统等方面。xxMEYER(xx),主要应用: 造纸机械。 库柏KUBLER(德国),品种齐全,应用广泛。 希科SIKO (德国),磁性设计,耐潮湿,耐油污。 xxT+R (xx)。 LENORD+LINDE(xx)。 xxLENORD+BAUER(xx)。 FRABA(xx)。 ELTRA(xx)。 图尔克TURCK(xx)。 莱卡LIKA(意大利),获得ESA认证,适用航空、烟机等。
xxxxELCIS(xx)。 SCANCON (丹麦),微型高精度编码器及防爆编码器。 堡盟Baumer (瑞士),高精度,高安全性,所占空间少。 莱纳林德LEINE LINDE(瑞典)。 丹纳赫Danaher (美国),供应ACURO系列编码器。 xxxxBEI IDEACOD(xx)。 日韩品牌(中低端): 欧姆龙OMRON(日本)以小型编码器居多,价格低廉。 内密控NEMICON(日本)小型编码器,产品稳定。 多摩川TAMAGAVA(日本)伺服电机,电梯应用较多 光洋KOYO(日本)同上,主要为TRD系列。 奥托尼克斯Autonics (韩国)市场以E40系列较多。 MTL(xx)以位置测量见长。 选用的是增量型还是绝对型编码器,绝对型有断电记忆功能,开机不用找零点,这是原理决定的,增量型不行,所以,绝对型编码器一般是增量型价格的好几倍,如果是增量型的选型,脉冲多少,电压多少,输出电路什么(跟后继电路要匹配),出线方式是什么,电缆还是插头,要几米,安装方式如何,(出轴还是空心或者半空),振动性如何,IP防护等级如何(视环境和应用而定)。主要分电气和机械2部分吧,你看着选就行了,一般来说,体积大的编码器用在重工业(抗冲击),钢铁,水利,石油化工,冶金等品牌比如P+F,SICK-STEGMAN,HUBNER-GIESSEN等,体积小的用在轻工业,纺织印刷包装等,品牌比如OMRON,NEMICON,AUTONICS,微型的不算在内哈,总之科技含量较高的一般都是欧洲(德国的多)和美国的编码器,主要是因为编码器是测量仪器,主要看的是精度,这方面德国海德汉Heidenhain公司是这方面的专家,
光栅尺和磁栅尺的区别
光栅尺和磁栅尺的区别 光栅尺--利用光的干涉和衍射原理制作而成的传感器。当两块栅距相同的光栅叠放在一起,同时让线纹构成一微小角度,这时在平行光照射下,与刻线垂直方向上就能看到对称分布的明暗相间的条纹,称为莫尔条纹,因此莫尔条纹是光的衍射和干涉作用的总效果。当光栅移动一个小栅距时,莫尔条纹随之移动一个条纹间距,这样,我们测量莫尔条纹的宽度就比测量光栅线纹宽度容易的多。此外,由于每条莫尔条纹都是由许多光栅线纹的交点组成,当线纹中有一条线纹有误差时(间距不等或倾斜),这条有误差的线纹和另一光栅线纹的交点位置将产生变化。但是,一条莫尔条纹是由许多光栅线纹交点组成,因此,一个线纹交点位置的变化,对于一条莫尔条纹来讲其影响就非常小了,所以莫尔条纹可以起到放大和平均的作用。 磁栅尺--利用磁极的原理制作而成的传感器。基尺是被均匀磁化的钢带。S和N 极均匀间隔排列在钢带上,通过读数头读取S,N极的变化来记数。 光栅尺受温度影响较大,一般使用环境在40摄士度以下。 敞开式磁栅尺容易受磁场影响,封闭式磁栅尺则无此困扰,但成本较高。 光栅尺是利用了光学原理,把尺子上分成一定密度的小段,然后拿读数头来读这些刻度段,据说是受光线的影响比较严重。 而磁尺是将尺上极化成N、S极的小段,拿相应的读数头来读,据说是受磁场影响比较严重。 光栅尺以精度见长,量程在长度0---2米范围性价比有明显优势,应用如金属切削机床、线切割、电火花、测量光学投影仪等等。因光栅尺生产工艺的原因,若测量长度超过5米,生产制造将很困难(两块玻璃尺要45°斜角对接以增加长度,用于玻璃尺镀铬机空间有限),价格会很贵。同等情况下进口光栅对工作环境的要求很高 磁栅尺以耐水耐油污耐粉尘耐震动性见长,长度在2米以上性价比优势愈加明显,并且长度越长优势越明显。磁栅尺的量程可达30米。在大型金属切削机床如大的镗床、铣床,水下测量,木材石材加工机床(工作环境粉尘很重),金属板材压轧设备(大型成套设备)等应用方面有明显优势。 球栅尺和光栅尺比较:光栅尺在3米以下的价格一般是球栅尺价格的50%,3米以上的至8米的光栅同球栅价格基本一样。8米至10米的光栅尺价格要高出球栅尺价格20%,10米至12米的光栅尺价格要高出球栅尺价格50%。从短尺价格比较光栅尺要便宜,但光栅的使用寿命一般是3年,而球栅的使用寿命在10年以上。从长尺比较球栅的优势就更多了。所以总体说安装球栅尺的效益要好于光栅尺。 安装球栅尺的好处:安装球栅尺从真正意义上说,是从被动测量向主动测量转变。由离线测量转向在线测量。大大提高了产品的加工精度和工作效率,实现了二级工可以干八级工的工作。由于球栅尺最长可以做到30米,所以特别适合安装在大型或超大型机床上。如龙门铣床、镗床等。一般机床安装球栅尺后可
伺服电机编码器常用概念
编码器常用概念 线:编码器光电码盘的一周刻线,增量式码盘刻线可以10线、100线、2500线的刻线,只要你码盘能刻得下,可任意选数;绝对值码盘其码盘刻线因格雷码的编排方式,决定其基本是2的幂次方线,如256线、1024线、8192线等。 位:2的n次方,由于绝对值码盘常常是2的幂次方线输出,所以,大部分的绝对值码盘是以“位”来表达,但绝对值码盘也有特别的格雷余码输出的,如360线、720线、3600线等。增量值编码器也有用位来表示的,如15位、17位,其是通过内部细分,将计算的线数倍增后,一般大于10000线了,就用“位”来表达。 分辨率:编码器可以分辨的角度,对于一般计算,以360度/刻线数计算,目前大部分就直接用多少线来表达了。但这样就有一些概念的混淆,如增量值编码器,如用上A/B两相的四倍频,2500线的,分辨率实际可以是360/10000的,如果内部细分计算的“线”可以更多,达到15位、17位的,所以,常常的增量编码器用“线”来表达的,代表还没有倍频细分,用“位”来表达的,是已经细分过的了。分辨率:又称位数、脉冲数、几线制(绝对型编码器中会有此称呼),对于增量型编码器而言就是轴旋转一圈编码器输出的脉冲个数;对于绝对型编码器来说,则相当于把一圈360°等分成多少份,例如分辨率是256P/R,则等于把一圈360°等分成了256,每旋转1.4°左右输出一个码值。分辨率的单位是P/R。 增量式:码盘内刻线是两道:A/B,Z,通过数线累加(增量)计算旋转角度,有的增加了U\V\W,将编码器通过120度的分割,分成三个区来判断位置,称为混合型编码器。有的通过内部细分电路,提高分辨“线”,并用内部电池记忆及用“位”来表达,常常混称为“绝对值”,实际应该是“伪绝对”。 绝对式:码盘内刻线是n道,以2,4,8,16。。。编排组合,读数是以“0”“1”编码方式光盘直接读取,而非累加,故不受停电、干扰影响。至于增量,绝对哪个分辨率及精度更高,如果是实际的码盘刻线,绝对值码盘分辨“数”可以是增量码盘的一倍,如果是倍频技术,那增量值码盘分辨"数”又可以大于绝对值,但注意,我用的是“分辨数”,不代表精度,因为细分倍频是电气模拟技术,并不改善精度,精度是由码盘刻线、轴的机械安装、电气的响应综合因数决定的。综合来看,分辨率,是增量的可以做的比绝对的高,而精度,就是绝对值的高了,因为它是不受停电、干扰、速度、电气响应的影响的,尤其是高精度又要高速的情况下,增量细分是无法满足要求的。 欧洲市场伺服用绝对值多圈:每圈分辨率:11位是2048;12位4096;13位(即2的13次方)是8192;14位是16384;15位是32768;16位(即2的16次方)是65536;17位131072;18位262144;19位524288;20位1048576;.....25位33554432(德国海德汉的单圈最高可以到25位,国产的单圈16位)。连续测量圈数:大多数12位4096,少数14位16384,总位数25位--37位。(德国海德汉目前可以提供的分辨率+圈数最高可以到37位,;国产的28位GEMPLE) 输出信号:SSI+sin/cos,1MHz,格雷码 Biss,2MHz,纯二进制码 Hipeface+sin/cos,2MHz,纯二进制码(含校验)
各种编码器的调零方法
各种编码器的调零方法 增量式编码器的相位对齐方式 增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下: 1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置; 2.用示波器观察编码器的U相信号和Z信号; 3.调整编码器转轴与电机轴的相对位置; 4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系; 5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。 撤掉直流电源后,验证如下: 1.用示波器观察编码器的U相信号和电机的UV线反电势波形; 2.转动电机轴,编码器的U相信号上升沿与电机的UV线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。 上述验证方法,也可以用作对齐方法。 需要注意的是,此时增量式编码器的U相信号的相位零点即与电机UV线反电势的相位零点对齐,由于电机的U相反电势,与UV线反电势之间相差30度,因而这样对齐后,增量式编码器的U相信号的相位零点与电机U相反电势的-30度相位点对齐,而电机电角度相位与U相反电势波形的相位一致,所以此时增量式编码器的U相信号的相位零点与电机电角度相位的-30度点对齐。 将编码器的U相信号零点与电机电角度的零点直接对齐,为达到此目的,可以: 1.用3个阻值相等的电阻接成星型,然后将星型连接的3个电阻分别接入电机的UVW三相绕组引线; 2.以示波器观察电机U相输入与星型电阻的中点,就可以近似得到电机的U相反电势波形; 3.依据操作的方便程度,调整编码器转轴与电机轴的相对位置,或者编码器外壳与电机外壳的相对位置; 4.一边调整,一边观察编码器的U相信号上升沿和电机U相反电势波形由低到高的过零点,最终使上升沿和过零点重合,锁定编码器与电机的相对位置关系,完成对齐。 由于普通增量式编码器不具备UVW相位信息,而Z信号也只能反映一圈内的一个点位,不具备直接的相位对齐潜力,因而不作讨论。 绝对式编码器的相位对齐方式 绝对式编码器的相位对齐对于单圈和多圈而言,差别不大,其实都是在一圈内对齐编码器的检测相位与电机电角度的相位。早期的绝对式编码器会以单独的引脚给出单圈相位的最高位的电平,利用此电平的0和1的翻转,也可以实现编码器和电机的相位对齐,方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V出,将电机轴定向至一个平衡位置; 2.用示波器观察绝对编码器的最高计数位电平信号;
光栅尺的应用与原理
光栅尺的应用与原理 光栅尺的结构是由有刻有窄的等间距的线纹标尺光栅和读数头组成,读数头是由刻有与标尺光栅光刻密度相同好的指示光栅、光学系统和光路原件等组成。标尺光栅与尺度光栅与一定间距平行放置,并且他们的刻度线相互倾斜一定角度@,标尺光栅固定不动,指示光栅沿着垂直线条纹方向运动,光线照在标尺光栅上放射或者投射在指示光栅并发生光的衍射,产生明暗相间的莫尔条纹,光电探测器检测莫尔条纹的宽度变化并将其转换成电信号输出给控制装置。 莫尔条纹的特点: 1.莫尔条纹的移动与光栅栅距之间的移动关系,光栅移动一个条纹,莫尔条纹正好移动一 个条纹。 2.莫尔条纹的放大作用:B=W/(2SIN2/2)=W/2 主要的元件:发光LED, 标尺光栅,指示光栅,光电探测器。 光栅的选用:选用光栅要综合考虑一下几个要素: 1.考虑被测物理量的性质,要根据呗测量的行程和精度要求选择量程和精度,根据被测量 的最大速度确定光栅尺的最大移动速度以及是否需要基准标记和相位开关传感器,要什么形式的光栅。 2.根据控制器可以控制的信号的类型选择光栅输出类型,还要考虑接口的硬件匹配。 3.根据工作条件确定光栅尺应具备在何种环境下工作的能力 4.根据被测的物体考虑安装方案。考虑到空间,方向等问题。 5.设计电缆的长度 6.价格和服务 7.市场的方便,型号的选择。 光栅的主要技术参数: 分辨率:表征的测量精度,有5.0um ,1.0um ,0.5um ,0.1um 输出波形:方波和正弦波两种。 按控制的形式:数字量和模拟量,要与控制器匹配。 测量周期:没测一次所需的时间 测量长度:可以应许的测量范围 测量方式:绝对值和识字增量坐标 使用温度:5----45度 供电电源:一般为+5+5%,电流大小为120mA 最大移动速度:要大于要求值 最小时钟频率:要保证控制器的频率高于要求值。 安装: 把光栅尺贴在平台的固定部分上。安装要用专用工具,保证光栅的安装合付要求(水平度、垂直度)。 读数头要安装在平台的移动部分上。在安装光栅尺时要先安装光栅尺,然后根据光栅尺安装读数头。保证读头与光栅尺的距离2—3mm,
常用旋转编码器型号规格
ROTARY ABSOLUTE ENCODERS
500P/R 4.3~A 相,A 相B 相Z 相NPN 、PNP 开路输出,电压输出A 6 C 2 - C WZ 6C A:绝对式编码器 C:增量式编码器S:单相输出(单“”相) W:多相输出 (双相“A 、B ”相) A Z:带复位相输出(零位) 1:DC5V 2:DC12V 3:DC5~12V B: PNP 开路输出PNP C: NPN 开路输出 E: 电压输出 G: 互补输出 X: 线性驱动输出 外 径 W:20mm A:25mm B:40mm C: H ΦΦΦ50Φ66设计号:中空轴编码器 Φmm D:mm 4:DC24V 5:DC12~24V 6:DC4.5~36V 微型增量 编 码 器Small Rotary Encoders Incremental
E6C2-C E6C3-C E6C3-C H 4.336VDC A 相,A 相B 相,相Z 相,A 相B 相Z 相E6C2-C H 4.3~36VDC 5VDC 10 2500P/R 、PNP 开路输出,电压输出、互补输出、线性驱动输出A 相,A 相B 相,A 相,A 相B 相Z 相PNP 开路输出,电压输出、互补输出、线性驱动输出10 3600P/R 10~ 2500P/R 10~ 5000P/R
10~ 3000P/R 4.3~,5VDC 10~ 5000P/R A 相,A 相B 相,相Z 相,A 相B 相Z 相E6G1-C E6G2-C E6G3-C TRD50-J-10~ 5000P/R E6G2-C E6G3-C E6G5-C E6G6-C 4.3~36VDC 5VDC 10~ 3000P/R NPN 、PNP 开路输出,电压输出、互补输出、线性驱动输出A 相,A 相B 相,A 相B 相相,A 相B 相Z 相通用增量 编 码 器Common Incremental Rotery Encoders
MPEG4 编码器流程
一、MPEG4 编码器流程 MPEG-4视频编码器的实现步骤 首先读取一帧数据,取一个宏块,根据编码控制选择编码类型,是intra 帧内编码,还是inter 帧间编码。如果是I 帧,所有宏块都是intra 帧内编码,则读取的宏块数据直接进入DCT 、Q(量化)、DC/AC 预测(直流系数与交流系数)、RLC(行程编码)并与其他信息一起合成形成码流;如果是P 帧,先进行ME(运动估计),然后判断是intra 帧内编码,还是inter 帧间编码。如果是intra 帧内编码,则直接利用宏块本身进行DCT 等一系列数据处理;如果是inter 帧间编码,则将经过运动估计得到的运动矢量MV 传送给MC(运动补偿)单元,结合帧缓存中的上一帧的重建帧数据与当前宏块的像素值做运算,得到残差数据,然后对残差值进行DCT 等处理。 在编码过程中,有一个重建图像的过程,其得到的数据存放在帧缓存中,作为下一帧的参考帧。 二、各层参数 (一)MPEG-4视频数据流结构: 其位流语法从上到下大致可以分为: 视觉对象序列(Visual Object Sequence), 视觉对象(Visual Object), 视频对象层(Video Object Layer), 视频对象平面层(Group of Video Object Plane ) 帧缓存 VLC 多路复合编码控制 MV ME MC DCT Q IQ IDCT RLC intra inter 编码模式 量化参数DC/AC 预测扫描取一个宏块读 取 一 帧 数 据
视频对象平面(Video Object Plane)。 VS(Visual Object Sequence):由一系列VO视频对象组成。 场景是一个或多个声视频对象的组合。场景的逻辑结构可以用一棵树表示,树中的节点是声视频对象。MPEG4系统用二进制场景格式BIFS描述场景中声视频对象的空间和时间位置及它们之间的关系。MPEG4的视频比特流提供了对场景的分层描述。在比特流中,表示场景的层是可视对象序列VS(VideoObjectSequence),它是一个完整的MPEG4场景,其中可能包含自然对象或合成的对象以及它们的增强层。 VO(Video Object):是可视场景中景物的抽象描述,从用户的角度,它代表画面中任何有意义的物理实体。视频对象是MPEG-4编码的独立单元,由时间上连续的许多帧构成。VO的构成依赖于工具的应用和系统实际所处的环境,在超低比特率的情况下,VO可以是一个矩形帧,与MPEG-1、H.263兼容;对于基于内容的应用,VO可能是场景中的某一物体,也可能是计算机产生的二维、三维图形等。每一个VO有3类信息描述:形状信息、运动信息和纹理信息。 VOL(Video Object Layer):属于同一VO的形状、运动和纹理信息被编码成一个单独的结构,称为视频对象层(VOL)。它的引入主要是用来实现VO的视域或者空域分级(Scalable)。对同一个VO,可以用不同的空间或时间分辨率编码多层结构,从一个基础层开始,用增加一些增强层次的方法,以分层的方式重建视频。每个视频对象可以编码成可伸缩(多层)或不可伸缩(单层)的视频流,用哪一种方式编码取决于应用。
海德汉-光栅与编码器介绍
位置检测装置作为数控机床的重要组成部分,其作用就是检测位移量,并发出反馈信号与数控装置发出的指令信号相比较,若有偏差,经放大后控制执行部件使其向着消除偏差的方向运动,直至偏差等于零为止。为了提高数控机床的加工精度,必须提高检测元件和检测系统的精度。其中以编码器,光栅尺,旋转变压器,测速发电机等比较普遍,下面主要对光栅和编码器进行说明。 光栅,现代光栅测量技术 简要介绍: 将光源、两块长光栅(动尺和定尺)、光电检测器件等组合在一起构成的光栅传感器通常称为光栅尺。光栅尺输出的是电信号,动尺移动一个栅距,输出电信号便变化一个周期,它是通过对信号变化周期的测量来测出动就与定就职相对位移。目前使用的光栅尺的输出信号一般有两种形式,一是相位角相差90度的2路方波信号,二是相位依次相差90度的4路正弦信号。这些信号的空间位置周期为W。下面针对输出方波信号的光栅尺进行了讨论,而对于输出正弦波信号的光栅尺,经过整形可变为方波信号输出。输出方波的光栅尺有A 相、B相和Z相三个电信号,A相信号为主信号,B相为副信号,两个信号周期相同,均为W,相位差90o。Z信号可以作为较准信号以消除累积误差。 一、栅式测量系统简述 从上个世纪50年代到70年代栅式测量系统从感应同步器发展到光栅、磁栅、容栅和球栅,这5种测量系统都是将一个栅距周期内的绝对式测量和周期外的增量式测量结合了起来,测量单位不是像激光一样的是光波波长,而是通用的米制(或英制)标尺。它们有各自的优势,相互补充,在竞争中都得到了发展。由于光栅测量系统的综合技术性能优于其他4种,而且制造费用又比感应同步器、磁栅、球栅低,因此光栅发展得最快,技术性能最高,市场占有率最高,产业最大。光栅在栅式测量系统中的占有率已超过80%,光栅长度测量系统的分辨力已覆盖微米级、亚微米级和纳米级,测量速度从60m/min,到480m/min。测量长度从1m、3m达到30m和100m。 二、光栅测量技术发展的回顾 计量光栅技术的基础是莫尔条纹(Moire fringes),1874年由英国物理学家 L.Rayleigh首先提出这种图案的工程价值,直到20世纪50年代人们才开始利用光栅的莫
编码器的分类、特点及其应用详解
编码器的分类、特点及其应用详解 编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。 根据检测原理,编码器可分为光学式、磁式、感应式和电容式,根据其刻度方法及信号输出形式,可分为增量式、绝对式以及混合式三种。 1.1 增量式编码器增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z 相;A、B两组脉冲相位差90度,从而可方便的判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。 1.2 绝对式编码器绝对式编码器是直接输出数字的传感器,在它的圆形码盘上沿径向有若干同心码盘,每条道上有透光和不透光的扇形区相间组成,相邻码道的扇区树木是双倍关系,码盘上的码道数是它的二进制数码的位数,在吗盘的一侧是光源,另一侧对应每一码道有一光敏元件,当吗盘处于不同位置时,各光敏元件根据受光照与否转换出相应的电平信号,形成二进制数。这种编码器的特点是不要计数器,在转轴的任意位置都可读书一个固定的与位置相对应的数字码。显然,吗道必须N条吗道。目前国内已有16位的绝对编码器产品。 1.3 混合式绝对编码器混合式绝对编码器,它输出两组信息,一组信息用于检测磁极位置,带有绝对信息功能;另一组则完全同增量式编码器的输出信息。 二、光电编码器的应用增量型编码器与绝对型编码器区别 1、角度测量