经典算法——动态规划教程

动态规划是对最优化问题的一种新的算法设计方法。由于各种问题的性质不同,确定最优解的条件也互不相同,因而动态规划的没计法对不同的问题,有各具特色的表示方式。不存在一种万能的动态规划算法。但是可以通过对若干有代表性的问题的动态规划算法进行讨论,学会这一设计方法。
多阶段决策过程最优化问题
——动态规划的基本模型
在现实生活中,有一类活动的过程,由于它的特殊性,可将过程分成若干个互相联系的阶段,在它的每一阶段都需要作出决策,从而使整个过程达到最好的活动效果。因此各个阶段决策的选取不能任意确定,它依赖于当前面临的状态,又影响以后的发展。当各个阶段决策确定后,就组成一个决策序列,因而也就确定了整个过程的一条活动路线。这种把一个问题看做是一个前后关联具有链状结构的多阶段过程就称为多阶段决策过程,这种问题称为多阶段决策最优化问题。
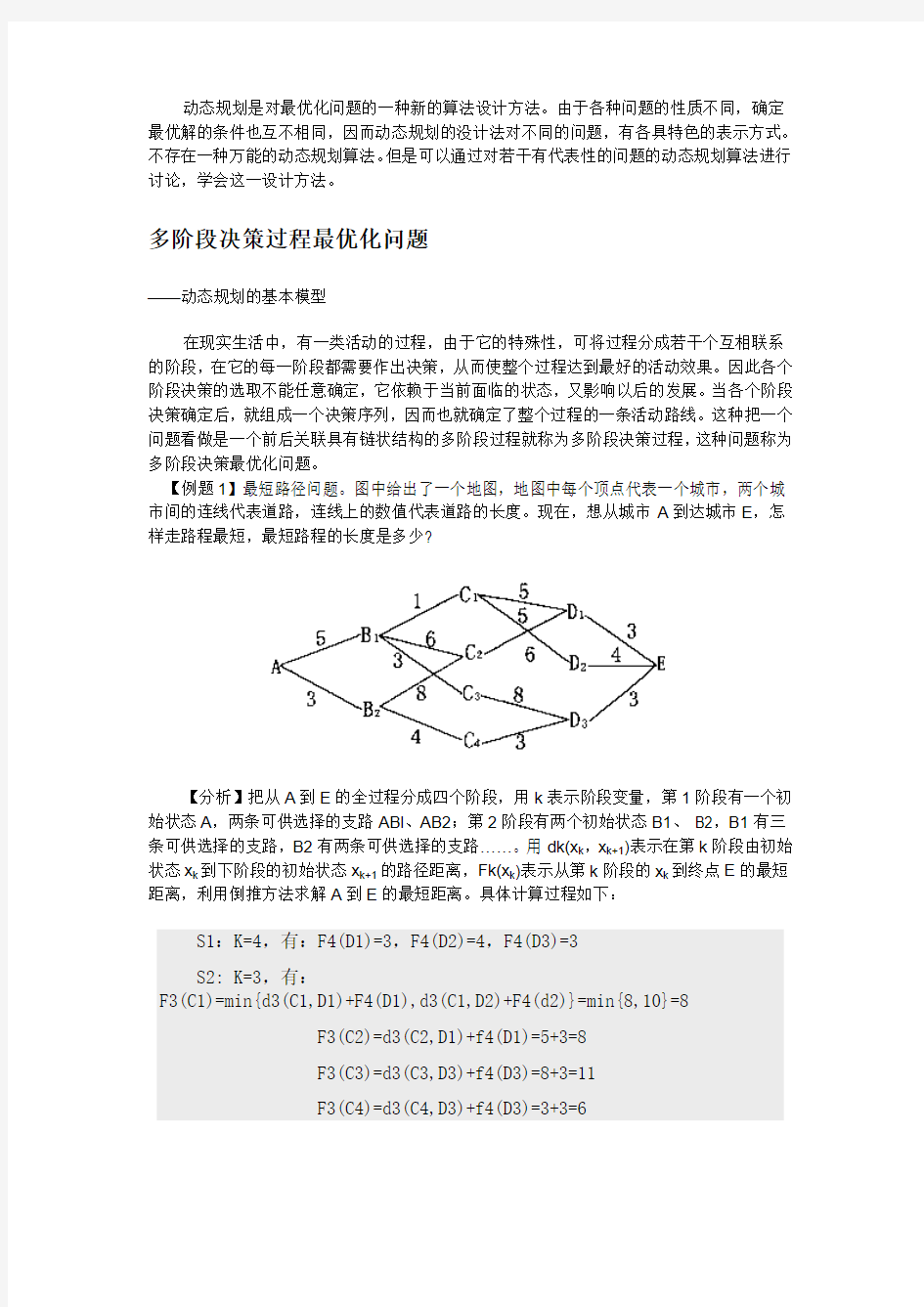
【例题1】最短路径问题。图中给出了一个地图,地图中每个顶点代表一个城市,两个城市间的连线代表道路,连线上的数值代表道路的长度。现在,想从城市A到达城市E,怎样走路程最短,最短路程的长度是多少?
【分析】把从A到E的全过程分成四个阶段,用k表示阶段变量,第1阶段有一个初始状态A,两条可供选择的支路ABl、AB2;第2阶段有两个初始状态B1、 B2,B1有三条可供选择的支路,B2有两条可供选择的支路……。用dk(x k,x k+1)表示在第k阶段由初始状态x k到下阶段的初始状态x k+1的路径距离,Fk(x k)表示从第k阶段的x k到终点E的最短距离,利用倒推方法求解A到E的最短距离。具体计算过程如下:
S1:K=4,有:F4(D1)=3,F4(D2)=4,F4(D3)=3
S2: K=3,有:
F3(C1)=min{d3(C1,D1)+F4(D1),d3(C1,D2)+F4(d2)}=min{8,10}=8
F3(C2)=d3(C2,D1)+f4(D1)=5+3=8
F3(C3)=d3(C3,D3)+f4(D3)=8+3=11
F3(C4)=d3(C4,D3)+f4(D3)=3+3=6
S2: K=2,有:
F2(B1)=min{d2(B1,C1)+F3(C1),d2(B1,C2)+f3(C2),d2(B1,C3)+F3(C3)}=min {9,12,14}=9
F2(m)=min{d2(B2,c2)+f3(C2),d2(B2,C4)+F3(C4)}=min{16,10}=10
S4:k=1,有:
F1(A)=min{d1(A,B1)+F2(B1),d1(A,B2)+F2(B2)}=min{13,13}=13
因此由A点到E点的全过程的最短路径为A—>B2一>C4—>D3—>E。最短路程长度为13。
从以上过程可以看出,每个阶段中,都求出本阶段的各个初始状态到过程终点E的最短路径和最短距离,当逆序倒推到过程起点A时,便得到了全过程的最短路径及最短距离,同时附带得到了一组最优结果(即各阶段的各状态到终点E的最优结果)。
在上例的多阶段决策问题中,各个阶段采取的决策,一般来说是与时间有关的,决策依赖于当前状态,又随即引起状态的转移,一个决策序列就是在变化的状态中产生出来的,故有“动态”的含义,称这种解决多阶段决策最优化问题的方法为动态规划方法。
根据上例分析和动态规划的基本概念,可以得到动态规划的基本模型如下:
(1)确定问题的决策对象。
(2)对决策过程划分阶段。
(3)对各阶段确定状态变量。
(4)根据状态变量确定费用函数和目标函数。
(5)建立各阶段状态变量的转移过程,确定状态转移方程。
动态规划的基本知识
动态规划是研究一类最优化问题的方法,在经济、工程技术、企业管理、工农业生产及军事等领域中都有广泛的应用。近年来,在ACM/ICPC中,使用动态规划(或部分应用动态规划思维)求解的题不仅常见,而且形式也多种多样。而在与此相近的各类信息学竞赛中,应用动态规划解题已经成为一种趋势,这和动态规划的优势不无关系。
1、动态规划的常用名词
在学习动态规划之前,先得对下面的名词有所了解。本书将标准名词作了一些简化,便于大家更好的理解。
(1)状态(smte)
对于一个问题,所有可能到达的情况(包括初始情况和目标情况)都称为这个问题的一个状态。
(2)状态变量(s k)
对每个状态k关联一个状态变量s k,它的值表示状态k所对应的问题的当前解值。
(3)决策(decision)
决策是一种选择,对于每一个状态而言,你都可以选择某一种路线或方法,从而到达下一个状态。
(4)决策变量(d k)
在状态k下的决策变量d k的值表示对状态k当前所做出的决策。
(5)策略
策略是一个决策的集合,在我们解决问题的时候,我们将一系列决策记录下来,就是一个策略,其中满足某些最优条件的策略称之为最优策略。
(6)状态转移函数(t)
从一个状态到另一个状态,可以依据一定的规则来前进。我们用一个函数t来描述这样的规则,它将状态i和决策变量d i映射到另一个状态j,记为t(i,d i)=j
(7)状态转移方程(f)
状态转移方程f描述了状态变量之间的数学关系。一般来说,与最优化问题相应,状态转移方程表示s i的值最优化的条件,或者说是状态i所对应问题的最优解值的计算公式,用代数式表示就是:
s i=f({(s j,d j)|i=t(j,d j),对决策变量d j所有可行的取值})
2、最优化原理
1951年美国数学家R.Bellman等人,根据一类多阶段问题的特点,把多阶段决策问题变换为一系列互相联系的单阶段问题,然后逐个加以解决。一些静态模型,只要人为地引进“时间”因素,分成时段,就可以转化成多阶段的动态模型,用动态规划方法去处理。与此同时,他提出了解决这类问题的“最优化原理”(Principle of optimality):
“一个过程的最优决策具有这样的性质:即无论其初始状态和初始决策如何,其今后诸策略对以第一个决策所形成的状态作为初始状态的过程而言,必须构成最优策略”。简言之,一个最优策略的子策略,对于它的初态和终态而言也必是最优的。
这个“最优化原理”如果用数学化一点的语言来描述的话,就是:假设为了解决某一优化问题,需要依次作出n个决策D1,D2,…,D n,如若这个决策序列是最优的,对于任何一个整数k,1 < k < n,不论前面k个决策是怎样的,以后的最优决策只取决于由前面决策所确定的当前状态,即以后的决策D k+1,D k+2,…,D n也是最优的。
最优化原理是动态规划的基础。任何一个问题,如果失去了这个最优化原理的支持,就不可能用动态规划方法计算。
3、什么是动态规划
动态规划是运筹学的一个分支。与其说动态规划是一种算法,不如说是一种思维方法来得更贴切。因为动态规划没有固定的框架,即便是应用到同一道题上,也可以建立多种形式的求解算法。许多隐式图上的算法,例如求单源最短路径的Dijkstra算法、广度优先搜索算法,都渗透着动态规划的思想。还有许多数学问题,表面上看起来与动态规划风马牛不相及,但是其求解思想与动态规划是完全一致的。
因此,动态规划不像深度或广度优先那样可以提供一套模式,需要的时候,取来就可以使用;它必须对具体问题进行具体分析处理,需要丰富的想象力去建立模型,需要创造性的思想去求解。
4、动态规划适于解决什么样的问题
准确地说,动态规划不是万能的,它只适于解决一定条件的最优策略问题。
或许,大家听到这个结论会很失望:其实,这个结论并没有削减动态规划的光辉,因为属于上面范围内的问题极多,还有许多看似不是这个范围中的问题都可以转化成这类问题。
上面所说的“满足一定条件”主要指下面两点:
(1)状态必须满足最优化原理;
(2)状态必须满足无后效性。
所谓的无后效性是指:“过去的决策只能通过当前状态影响未来的发展,当前的状态是对以往决策的总结”。
这条特征说明什么呢?它说明动态规划适于解决当前决策和过去状态无关的问题。状态,出现在策略的任何一个位置,它的地位都是相同的,都可以实施同样的决策。这就是无后效性的内涵。
5、用动态规划解题的好处
说了这么多的动态规划,它到底给我们解题能带来什么好处呢?
其实动态规划的最大优势在于它具有极高的效率,而且动态规划还有其他的优势,例如:动态规划可以得出一系列解,算法清晰简便,程序易编、易调,等等。
最优化原理与无后效性
上面已经介绍了动态规划模型的基本组成,现在需要解决的问题是:什么样的“多阶段决策问题”才可以采用动态规划的方法求解?
一般来说,能够采用动态规划方法求解的问题必须满足.最优化原理和.无后效性原则。
(1)动态规划的最优化原理。作为整个过程的最优策略具有如下性质:无论过去的状态和决策如何,对前面的决策所形成的当前状态而言,余下的诸决策必须构成最优策略。
可以通俗地理解为子问题的局部最优将导致整个问题的全局最优,即问题具有最优子结构的性质,也就是说一个问题的最优解只取决于其子问题的最优解,非最优解对问题的求解没有影响。在例题1最短路径问题中,A到E的最优路径上的任一点到终点E的路径也必然是该点到终点E的一条最优路径,满足最优化原理。下面来讨论另外一个问题。
【例题2】余数最少的路径。
如图所示,有4个点,分别是A、B、C、D,
相邻两点用两条连线C2k,C2k-1(1≤k≤3)表示两
条通行的道路。连线上的数字表示道路的长
度。定义从A到D的所有路径中,长度除以
4所得余数最小的路径为最优路径。
求一条最优路径。
【分析】在这个问题中,如果还按照例题1中的方法去求解就会发生错误。按照例题1的思想,A的最优取值可以由B的最优取值来确定,而B的最优取值为(1+3) mod 4 = 0,所以A的最优值应为2,而实际上,路径C1-C3-C5可得最优值为(2+1+1) mod 4 = 0,所以,B的最优路径并不是A的最优路径的子路径,也就是说,A的最优取值不是由B的最优取值决定的,即其不满足最优化原理,问题不具有最优子结构的性质。
由此可见,并不是所有的“决策问题”都可以用“动态规划”来解决,运用“动态规划”来处理问题必须满足最优化原理。
(2)动态规划的无后效性原则。所谓无后效性原则,指的是这样一种性质:某阶段的状态一旦确定,则此后过程的演变不再受此前各状态及决策的影响。也就是说,“未来与过去无关”,当前的状态是此前历史的一个完整总结,此前的历史只能通过当前的状态去影响过程未来的演变。具体地说,如果一个问题被划分各个阶段之后,阶段I 中的状态只能由阶段I+1 中的状态通过状态转移方程得来,与其他状态没有关系,特别是与未发生的状态没有关系,这就是无后效性。从图论的角度去考虑,如果把这个问题中的状态定义成图中的顶点,两个状态之间的转移定义为边,转移过程中的权值增量定义为边的权值,则构成一个有
向无环加权图,因此,这个图可以进行“拓扑排序”,至少可以按他们拓扑排序的顺序去划分阶段。
看一看下面的两个具体例子。
【例题3】货郎担问题。对于平面给定的n个点,编程确定一条连结各点的、闭合的游历路线问题。图中给出了7个点的情况问题的解。
【例题4】旅行路线问题。在货郎担问题的基础上,若规定这种游历路线先从最左边开始,严格地由左至右到最右边的点,然后再严格地由右至左到出发点,求整个路程最短的路径长度。图中给出了7个点问题的解。
例3图货郎担问题
例4图旅行路线图
【分析】这两个问题看起来很非常相似,但本质上是完全不同的。为了方便讨论,可以将每个顶点标记号码。由于必然经过最右边的顶点7,所以一条路(P1-P2)可以看做两条路(P1-7)与(P2-7)的结合。因此,这个题目的状态可以用两条道路结合的形式表示。可以把这些状态中,两条路中起始顶点相同的状态归于一个阶段,设为阶段[P1,P2]。
那么,对于旅行路线问题来说,阶段[P1,P2]如果可以由阶段[Q1,Q2]推出,则必须满足的条件就是:Pl < Q1或P2 < Q2。例如,阶段[3,4]中的道路可以由阶段[3,5]中的道路加一条边4—5得出,而阶段[3,5]的状态却无法由阶段[3,4]中的状态得出,因为在旅行路线问题的要求中必须严格地由左到右来旅行。所以如果已经知道了阶段[3,4]中的状态,则阶段[3,5]中的状态必然已知,因此,问题满足无后效性原则,可以考虑用动态规划方法求解。
而对于货郎担问题,阶段与阶段之间没有什么必然的“顺序”。如
道路{3—2—5—7,4—6—7}属于阶段[3,4],可由属于阶段[2,4]的道路{2—5—7,4—6—7}推出;而道路{2—3—6—7,4—5—7}属于阶段[2,4],可由属于阶段[3,4]的道路{3—6—7,4—5—7}推出。如果以顶点表示阶段,推出关系表示边,那么,阶段[3,4]与阶段[2,4]对应的关系就如图右所示。可以很清晰地看出,这两个阶段的关系是“有后效性”的。因为这个图中存在“环路”。对于这个问题是不能像上一个问题那样来解决的。
阶段关系图
动态规划的逆向思维法
动态规划是一种思维方法,没有统一的、具体的模式。动态规划可以从多方面去考察,不同的方面对动态规划有不同的表述。我们不打算强加一种统一的表述,而是从多个角度对动态规划的思维方法进行讨论,希望大家在思维具体问题时,也能够从多个角度展开,这样收获会更大。
逆向思维法是指从问题目标状态出发倒推回初始状态或边界状态的思维方法。如果原问题可以分解成几个本质相同、规模较小的问题,很自然就会联想到从逆向思维的角度寻求问题的解决。
你也许会想,这种将大问题分解成小问题的思维不就是分治法吗?动态规划是不是分而治之呢?其实,虽然我们在运用动态规划的逆向思维法和分治法分析问题时,都使用了这种将问题实例归纳为更小的、相似的子问题,并通过求解子问题产生一个全局最优值的思路,但动态规划不是分治法:关键在于分解出来的各个子问题的性质不同。
分治法要求各个子问题是独立的(即不包含公共的子问题),因此一旦递归地求出各个子问题的解后,便可自下而上地将子问题的解合并成原问题的解。如果各子问题是不独立的,那么分治法就要做许多不必要的工作,重复地解公共的子问题。
动态规划与分治法的不同之处在于动态规划允许这些子问题不独立(即各子问题可包含公共的子问题),它对每个子问题只解一次,并将结果保存起来,避免每次碰到时都要重复计算。这就是动态规划高效的一个原因。
动态规划的逆向思维法的要点可归纳为以下三个步骤:
(1)分析最优值的结构,刻画其结构特征;
(2)递归地定义最优值;
(3)按自底向上或自顶向下记忆化的方式计算最优值。
【例题5】背包问题描述:
有一个负重能力为m的背包和n种物品,第i种物品的价值为v[i],重量为w[i]。在不超过背包负重能力的前提下选择若干个物品装入背包,使这些的物品的价值之和最大。每种物品可以不选,也可以选择多个。假设每种物品都有足够的数量。
分析:
从算法的角度看,解决背包问题一种最简单的方法是枚举所有可能的物品的组合方案并计算这个组合方案的价值之和,从中找出价值之和最大的方案。显然,这种靠穷举所有可能方案的方法不是一种有效的算法。
但是这个问题可以使用动态规划加以解决。下面我们用动态规划的逆向思维法来分析这个问题。
(1)背包问题最优值的结构
动态规划的逆向思维法的第一步是刻画一个最优值的结构,如果我们能分析出一个问题的最优值包含其子问题的最优值,问题的这种性质称为最优子结构。一个问题的最优子结构性质是该问题可以使用动态规划的显著特征。
对一个负重能力为m的背包,如果我们选择装入一个第i 种物品,那么原背包问题就转化为负重能力为m-w[i] 的子背包问题。原背包问题的最优值包含这个子背包问题的最优值。若我们用背包的负重能力来划分状态,令状态变量s[k]表示负重能力为k的背包,那么s[m]的值只取决于s[k](k≤m)的值。因此背包问题具有最优子结构。
(2)递归地定义最优值
动态规划的逆向思维法的第二步是根据各个子问题的最优值来递归地定义原问题的最优
值。对背包问题而言,有状态转移方程:
/max{s[k-w[i]]+v[i]}(其中1≤i≤n,且k-w[i]≥0)
s[k]= 若k>0且存在1≤i≤n使k-w[i]≥0,
\ 0 否则。
有了计算各个子问题的最优值的递归式,我们就可以直接编写对应的程序。下述的函数knapsack是输入背包的负重能力k,返回对应的子背包问题的最优值s[k]:
function knapsack(k:integer):integer;
begin
knapsack:=0;
for i:=1 to n do
if k-w[i]>=0 then
begin
t:=knapsack(k-w[i])+v[i];
if knapsack < t then knapsack:=t;
end;
end;
上述递归算法在求解过程中反复出现了一个子问题,且对每次重复出现的子问题都要重新解一次,这需要多花费不少时间。下面先考虑一个具体的背包问题。例如,当
m=3,n=2,v[1]=1,w[1]=1,v[2]=2,w[2]=2,
图1示出了由调用knapsack(3)所产生的递归树,每一个结点上标有参数k的值,请注意某些数出现了多次。
3
/\
2 1
/\\
1 0 0
/
图1
例如,knapsack(1)被引用了两次:在计算knapsack(3)和knapsack(2)中分别被引用;而knapsack(0)更是被引用了三次。如果knapsack(1)和knapsack(0)每次都要被重新计算,则增加的运行时间相当可观。
下面,我们来看看动态规划是如何解决这个问题的。
(3)按自顶向下记忆化或自底向上的方式求最优解
一般地,如果一个解最优化问题的递归算法经常反复地解重复的子问题,而不是总在产生新的子问题时,我们说该最优化问题包含重迭子问题。这类问题不宜用分治法求解,因为分治法递归的每一步要求产生相异的子问题。在这种情况下,采用动态规划是很合适的,因为该方法对每一个子问题只解一次,然后把解存放在一个表中,以便在解同样的子问题时查阅,充分利用了重迭子问题。一般来说,解决重迭子问题的方式有两种。
①自顶向下的记忆化方式
该方式的程序流程基本按照原问题的递归定义,不同的是,它专门设置了一张表,以记忆在求解过程中得出的所有子问题的解。一个记忆的递归算法为每个子问题的解在表中记录一个表项。初始时每个表项都包含一个特殊值,以示该表项的解有待填入。例如背包问题中:
s[i]=-1;(0≤i≤m)
当在递归算法的执行中第一次遇到一个子问题时(即s[i]=-1),计算其解并填入表中,以后每遇到该子问题,只要查看表中先前填入的值即可。
下面,我们按照自上而下的记忆化方式,写出求背包问题的递归算法。
函数memorized_knapsack输入背包的负重能力k,返回背包问题的解s[k]。s表应设为全局变量,使得函数执行后,传出所有子问题的解s[i](0≤i≤m)。
function memorized_knapsack(k:integer):integer;
begin
if s[k]=-1 then
begin
s[k]:=0;
for i:=1 to n do
if k-w[i]>=0 then
begin
t:=memorized_knapsack(k-W[i])+V[i];
if s[k] < t then s[k]:=t;
end;
end;
memorized_knapsack:=s[k];
end;
我们在主程序通过调用memorized_knapsack(m)即可获得背包问题的解。
显然这种自顶向下记忆化的算法效率比重复解重迭子问题的knapsack算法要强一些。此外,在程序中加入判别哪些子问题需要求解的语句,只解那些肯定要解的子问题,从而节省了时间。
②自底向上的方式
假设我们要解决在分析函数knapsack当中提出的那个具体的背包问题。观察一下在调用memorized_knapsack(4)的过程中,s[k]被计算出来的顺序。我们发现,首先是s[0]被计算出来,然后是s[1],s[2],最后s[3]被计算出来,这与调用的次序正好相反。
动态规划的执行方式是自底向上,所有的子问题计算一次,充分利用重迭子问题。因此,我们很自然就想到与这种自底向上的执行方式相应的采用自底向上的方式递推所有子问题的最优值。
我们知道,计算负重能力为k的背包问题的解仅依赖于计算负重能力小于k的背包问题的解,因此填s表的方式与解决负重能力递增的背包问题相对应:
最初设定负重能力为0的背包问题的解s[0]=0。然后依次考虑负重能力为1,2,…,m
的背包问题的解。每填入一个s[k](0≤k≤m)时,充分利用所有重迭子问题的解:s[k-w[i]](0≤i≤n,k-w[i]≥0)
下面是按照自底向上方式计算背包问题的算法流程。过程knapsack_order输入背包的负重能力k,s表设为全局变量。过程执行后所有子问题的解通过s表传给主程序。
procedure knapsack_order(k:integer);
begin
for i:=1 to k do s[i]:=0;
for j:=1 to k do
for i:=1 to n do
if j-w[i]>=0 then
begin
t:=s[j-w[i]]+v[i];
if s[j] < t then s[j]:=t;
end;
end;
我们在主程序调用knapsack_order(m),过程执行后s[m]即为背包问题的解。
最后,我们分析一下背包问题的动态规划解法的复杂度。所需的存储开销主要在s表上,其空间复杂度是O(m)。而整个s表用两重循环求出,循环内语句的执行只需常数时间,因此,时间复杂度是O(m,n)。
自顶向下的记忆化是动态规划的一种变形。动态规划的执行方式是自底向上,因此自底向上的计算方式是与动态规划的执行方式相一致的。它无需递归代价,且维护记忆表的开销也要小些,因此其效率通常好于自顶向下的记忆法。
但是,在动态规划的执行过程中,并不是所有的子问题都要用到它。对某个具体问题而言,可能有大部分子问题的最优值是不必计算的。自底向上的计算方式无法判断那些子问题是需要求解的,所以它将一视同仁地处理所有的子问题,这就可能会把大量的时间都花在计算不必解决的子问题上;而自顶向下的记忆法可以判断那些子问题是需要求解的,只解那些肯定要解的子问题,在这个意义上,自顶向下的算法效率又好于自底向上。所以到底那种方式效率更高,我们要具体问题具体分析。
最后,给出求解背包问题的程序如下:
{//背包问题程序}
program knapsack;
const
maxn=100;
maxm=1000;
var
m,n:integer;
S:array[0..maxm] of integer;
v,w:array[1..maxn] of integer;
{//输入数据}
procedure read_data;
var i:integer;
begin
read(m,n);
for i:=1 to n do read(v[i],w[i]); end;
{//采用自底向上的方式求解背包问题} procedure knapsack_order;
var i,j,t:integer;
begin
for i:=1 to m do s[i]:=0;
for j:=1 to m do
for i:=1 to n do
if j-w[i]>=0 then
begin
t:=s[j-w[i]]+v[i];
if s[j] < t then s[j]:=t;
end;
end;
{//主程序}
begin
read_data;
knapsack_order;
writeln(s[m]);
end.
如果想知道选择了哪些物品,那么应将程序作些改动,具体就是对选中的物品做一标记。见参考程序,其中的数据输入采用文件输入,输入文件为bbinput.txt(第1行为背包负重能力和物品种数,第2行为每种物品的价值,第三行为每种物品的重量)。
动态规划的正向思维法
正向思维法是指从初始状态或边界状态出发,利用某种规则不断到达新的状态,直到问题目标状态的方法。动态规划的正向思维法,正是从已知最优值的初始状态或边界状态开始,按照一定的次序遍历整个状态空间,递推出每个状态所对应问题的最优值。
提出动态规划的正向思维法的根本原因,是为了摆脱逆向思维法当中那种将大问题转化为子问题的思维框框,提供一种新的思维方式。在正向思维法中,我们不再区分原问题和子问题,将动态规划的过程看成是从状态到状态的转移。我们将所有的状态构造出一个状态空间,并在状态空间中设想一个状态网络,若对两个状态i,j,存在决策变量di使t(i,di)=j,则向状态网络添加有向边。给定己知最优值的初始状态或边界状态,我们可以沿着有向边推广到未知最优值的新状态,利用状态转移方程得到新状态的状态变量的最优值。我们可以用这种方式遍历整个状态空间,得到每个状态的状态变量的最优值。
因为正向思维法中不再区分原问题、子问题、子子问题,所以我们不再按照问题被递归调用求解的相反次序的方法确定状态最优值的计算次序。从上面我们知道可以按照状态的拓扑序列来计算每个状态的最优值,于是我们用一个新的名词“阶段”来描述在状态空间遍历的过程中,各个状态最优值的计算次序。我们将每个状态和一个阶段挂钩,前一个阶段的状态先计算,后一个阶段的状态后计算。有的时候我们甚至将一组状态和一个阶段挂钩,前一个阶段的那组状态先计算,后一个阶段的那组状态后计算,而在同一个阶段内,那些状态的计算次序可以是任意的。
动态规划的正向思维法的要点可归纳为以下三个步骤:
(1)构造状态网络;
(2)根据状态转移关系和状态转移方程建立最优值的递推计算式:
(3)按阶段的先后次序计算每个状态的最优值。
在下一节“最短路问题”当中,我们将结合最短路问题来示范动态规划的正向思维法。
动态规划的正向思维法带给我们什么启示呢?动态规划需要按阶段遍历整个状态空间,因此动态规划的效率取决于状态空间的大小和计算每个状态最优值的开销:如果状态空间的大小是多项式的,那么应用动态规划的算法就是多项式时间的;如果状态空间的大小是指数的,那么应用动态规划的算法也是指数时间的。因此,找一个好的状态划分对动态规划的效率是至关重要的。
将这个结论应用到逆向思维上,我们得出如下结果:一个问题的最优子结构常常暗示了动态规划的状态空间。典型的情况是,某一个特定问题可有几类“自然”的子问题,不同的子问题往往意味着不同的最优子结构,从而我们得到不同的状态划分方案。但是由这些不同的状态得到的算法的效率可能差异极大。例如,某个问题的输入是一个有序序列,有两类“自然”的子问题,一类子问题的输入是原问题输入序列的所有子序列,另一类子问题的输入是原问题输入序列的任意元素构成的新序列。显然若我们采用后者的最优子结构来建立状态,
它的状态空间必然远远大于基于前者的状态空间。那末基于后者的状态空间的动态规划则要解许多不必要的问题,使得算法的效率骤然下降。
从动态规划的正向思维法的分析可以看出,我们从已知最优值的初始状态和边界状态出发,利用最优化原理,一步一步向未知的目标状态推进,直到目标状态的最优值解决。这种“从己知推广到未知”的思维,正是动态规划正向思维法的精髓。大家在运用动态规划的正向思维法时如果能掌握这一点,那么就能达到应用自如的境界。
在应用动态规划求解的问题的过程中,希望读者能够注意从题目的分析中领会:应用动态规划解题是富于技巧和创造性的,没有固定的模式可套;题目出现的形式多种多样,而且大部分表面上与动态规划看不出直接的联系。只有在充分把握其思想精髓的前提下大胆联想,才能达到得心应手,灵活运用的境界。
动态规划设计方法的一般模式
动态规划所处理的问题是一个多阶段决策问题,一般由初始状态开始,通过对中间阶段决策的选择,达到结束状态。这些决策形成了一个决策序列,同时确定了完成整个过程的一条活动路线(通常是求最优的活动路线)。如图所示。动态规划的设计都有着一定的模式,一般要经历以下几个步骤。
┌───┐ ┌───┐ ┌───┐
初始状态→│决策1│→│决策2│→…→│决策n│→结束状态
└───┘ └───┘ └───┘
图1 动态规划决策过程示意图
(1)划分阶段:,按照问题的时间或空间特征,把问题分为若干个阶段。在划分阶段时,注意划分后的阶段一定要是有序的或者是可排序的,否则问题就无法求解。
(2)确定状态和状态变量:将问题发展到各个阶段时所处于的各种客观情况用不同的状态表示出来。当然,状态的选择要满足无后效性。
(3)确定决策并写出状态转移方程:因为决策和状态转移有着天然的联系,状态转移就是根据上一阶段的状态和决策来导出本阶段的状态。所以如果确定了决策,状态转移方程也就可写出。但事实上常常是反过来做,根据相邻两段各状态之间的关系来确定决策。
(4)寻找边界条件:给出的状态转移方程是一个递推式,需要一个递推的终止条件或边界条件。
(5)程序设计实现:动态规划的主要难点在于理论上的设计,一旦设计完成,实现部分就会非常简单。
根据上述动态规划设计的步骤,可得到大体解题框架如图2所示。
图2 动态规划设计的一般模式
上述提供了动态规划方法的一般模式,对于简单的动态规划问题,可以按部就班地进行动态规划的设计。
下面,给出一个利用动态规划方法求解的典型例子。
【例题6】数字三角形问题。图3示出了一个数字三角形宝塔。数字三角形中的数字为不超过100的整数。现规定从最顶层走到最底层,每一步可沿左斜线向下或右斜线向下走。任务一:假设三角形行数≤10,键盘输入一个确定的整数值M,编程确定是否存在一条路径,使得沿着该路径所经过的数字的总和恰为M,若存在则给出所有路径,若不存在,则输出“NO Answer!”字样。
任务二:假设三角形行数≤100,编程求解从最顶层走到最底层的一条路径,使得沿着该路径所经过的数字的总和最大,输出最大值。
输人数据:由文件输入数据,任务一中文件第一行是三角形的行数N和整数值 M。以后的N行分别是从最顶层到最底层的每一层中的数字。任务二中文件数据格式同任务一,只是第一行中没有整数值M。在例子中任务二的文件数据表示如下:
输入:5
7 输出:
3 8 7 输出路径和最大值
8 1 0 3 8 或“No Answer!”字样。
2 7 7 4 8 1 0
4 5 2 6 5 2 7 4 4
图3 数字三角形 4 5 2 6 5
【分析】对于这一问题,很容易想到用枚举的方法去解决,即列举出所有路径并记录每一条路径所经过的数字总和。然后判断数字总和是否等于给定的整数值M或寻找出最大的数字总和,这一想法很直观,而且对于任务一,由于数字三角形的行数不大(<=10),因此其枚举量不是很大,应该能够实现。但对于任务二,如果用枚举的方法,当三角形的行数等
于100时,其枚举量之大是可想而知的,显然,枚举法对于任务二的求解并不适用。其实,只要对对任务二稍加分析,就可以得出一个结论:
如果得到一条由顶至底的某处的一条最佳路径,那么对于该路径上的每一个中间点来说,由顶至该中间点的路径所经过的数字和也为最大。因此该问题是一个典型的多阶段决策最优化的问题。算法设计与分析如下:
对于任务一,合理地确认枚举的方法,可以优化问题的解法。由于从塔顶到底层每次都只有两种走法,即左或右。设“0”表示左,“1”表示右,对于层数为N的数字塔,从顶到底的一种走法可用一个N-1位的二进制数表示。如例中二进制数字串1011,其对应的路径应该是:8—1—4—6。这样就可以用一个N—l位的二进制数来模拟走法和确定解的范围。穷举出从0到2n-1个十进制数所对应的N-1位二进制串对应的路径中的数字总和,判定其是否等于M而求得问题的解。
对于任务二,采用动态规划中的顺推解法。按三角形的行划分阶段,若行数为 n,则可把问题看做一个n-1个阶段的决策问题。从始点出发,依顺向求出第一阶段、第二阶段……第n—1阶段中各决策点至始点的最佳路径,最终求出始点到终点的最佳路径。
设:f k(U k)为从第k阶段中的点Uk至三角形顶点有一条最佳路径,该路径所经过的数字的总和最大,f k(U k)表示为这个数字和;
由于每一次决策有两个选择,或沿左斜线向下,或沿右斜线向下,因此设:
U k1为k-1阶段中某点U k沿左斜线向下的点;
U k2为k-1阶段中某点U k沿右斜线向下的点;
d k(U k1)为k阶段中U k1的数字;d k(U k2)为k阶段中U k2的数字。
因而可写出顺推关系式(状态转移方程)为:
f k(U k)=max{f k-1(U k)+d k(U k1),f k-1(U k)+d k(U k2)}(k=1,2,3,…,n)
f0(U0)=0
经过一次顺推,便可分别求出由顶至底N个数的N条路径,在这N条路径所经过的N个数字和中,最大值即为正确答案。
动态规划方法实现的灵活性与技巧性
上述例子给出了一般情况下的动态规划思维过程。一些较为简单的问题可以“按部就班”来操作,但大多数的“动态规划”问题,特别是作为信息学竞赛中的“动态规划”问题,考察的知识是多方面的,应用的技巧是灵活多变的。下面给出上述例5变形的例子。
【例题7】花店橱窗布置问题(…99IOI试题)。假设以最美观的方式布置花店的橱窗,有F 束花,每束花的品种都不一样,同时,至少有同样数量的花瓶,被按顺序摆成一行,花瓶的位置是固定的,并从左到右,从1到V顺序编号,V是花瓶的数目,编号为1的花瓶在最左边,编号为V的花瓶在最右边,花束可以移动,并且每束花用1到F的整数惟一标识,标识花束的整数决定了花束在花瓶中列的顺序即如果I < J,则花束I必须放在花束J左边的花瓶中。例如,假设杜鹃花的标识数为1,秋海棠的标识数为2,康乃馨的标识数为3,所有的花束在放人花瓶时必须保持其标识数的顺序,即:杜鹃花必须放在秋海棠左边的花瓶中,秋海棠必须放在康乃馨左边的花瓶中。如果花瓶的数目大于花束的数目,则多余的花瓶必须空,即每个花瓶中只能放一束花。
每一个花瓶的形状和颜色也不相同,因此,当各个花瓶中放人不同的花束时会产生不同的美学效果,并以美学值(一个整数)来表示,空置花瓶的美学值为0。在上述例子中,花瓶与花束的不同搭配所具有的美学值,可以用如下表格表示:
┌───┬───┬───┬───┬───┬───┐
││花瓶1 │花瓶2 │花瓶3 │花瓶4 │花瓶5 │
├───┼───┼───┼───┼───┼───┤
│杜鹃花│ 7 │ 23 │ -5 │ -24 │ 16 │
├───┼───┼───┼───┼───┼───┤
│秋海棠│ 5 │ 21 │ -4 │ 10 │ 23 │
├───┼───┼───┼───┼───┼───┤
│康乃馨│ -21 │ 5 │ -4 │ -20 │ 20 │
└───┴───┴───┴───┴───┴───┘
根据表格,杜鹃花放在花瓶2中,会显得非常好看,但若放在花瓶4中则显得很难看。为取得最佳美学效果,必须在保持花束顺序的前提下,使花的摆放取得最大的美学值,如果具有最大美学值的摆放方式不止一种,则输出任何一种方案即可。题中数据满足下面条件:1≤F≤100,F≤V≤100,-50≤A IJ≤50,其中AII是花束I摆放在花瓶J中的美学值。输入整数F,V和矩阵(A IJ),输出最大美学值和每束花摆放在各个花瓶中的花瓶编号。
[分析]问题实际就是给定F束花和V个花瓶,以及各束花放到不同花瓶中的美学值,要求你找出一种摆放的方案,使得在满足编号小的花放进编号小的花瓶中的条件下,美学值达到最大。
(1)将问题进行转化,找出问题的原型。首先,看一下上述题目的样例数据表格。
将摆放方案的要求用表格表现出来,则摆放方案需要满足:每行选且只选一个数(花瓶);摆放方案的相邻两行中,下面一行的花瓶编号要大于上面一行的花瓶编号两个条件。这时可将问题转化为:给定一个数字表格,要求编程计算从顶行至底行的一条路径,使得这条路径所经过的数字总和最大(要求每行选且仅选一个数字)。同时,路径中相邻两行的数字,必须保证下一行数字的列数大于上一行数字的列数。
看到经过转化后的问题,发现问题与例题6的数学三角形问题十分相似,数字三角形问题的题意是:
给定一个数字三角形,要求编程计算从顶至底的一条路径,使得路径所经过的数字总和最大(要求每行选且仅选一个数字)。同时,路径中相邻两行的数字,必须保证下一行数字的列数与上一行数字的列数相等或者等于上一行数字的列数加1。
上例中已经知道:数字三角形中的经过数字之和最大的最佳路径,路径的每个中间点到最底层的路径必然也是最优的,可以用动态规划方法求解,对于“花店橱窗布置”问题经过转化后,也可采取同样的方法得出本题同样符合最优性原理。因此,可以对此题采用动态规划的方法。
(2)对问题原型动态规划方法的修改。“数字三角形”问题的动态规划方法为:已知它是用行数来划分阶段。假设用a[i,j]表示三角形第i行的第j个数字,用p [i,j]表示从最底层到a[i,j]这个数字的最佳路径(路径经过的数字总和最大)的数字和,易得问题的动态转移方程为:
p[n+1,j]=0 (1≤i≤n+1)
p[i,j]=max{p[i+1,j],p[i+1,j+1]}+a[i,j]
(1≤i≤i≤n,其中n为总行数)
分析两题的不同之处,就在于对路径的要求上。如果用path[i]表示路径中第 i行的数字编号,那么两题对路径的要求就是:“数字三角形”要求path[i]≤path[i+1]≤path[i]+1,而本题则要求path[i+1)>path[i]。
在明确两题的不同之后,就可以对动态规划方程进行修改了。假设用b[i,j]表示美学值表
格中第i行的第j个数字,用q[i,j]表示从表格最底层到b[i,j]这个数字的最佳路径(路径经过的数字总和最大)的数字和,修改后的动态规划转移方程为:
q[i,V+1]=-∞(1≤i≤F+1)
q[F,j]=b[F,j](1≤j≤V)
q[i,j]=max{q[i+1,k](j 这样,得出的max{q[1,k]} (1≤j≤V)就是最大的美学值,算法的时间复杂度为O(FV2)。 (3)对算法时间效率的改进。先来看一下这样两个状态的求解方法: q[i,j]=max{q[i+1,k] (j < k≤V+1)}+b[i,j] (1≤i≤F,1≤j≤V) q[i,j+1)=max{q[i+1,k] (j+1 < k≤V+1)}+a[i,j+1) (1≤i≤F,1≤j+1≤V) 上面两个状态中求max{q[i+1,k]}的过程进行了大量重复的比较。此时对状态的表示稍作修改,用数组t[i,j]=max{q[i,k](j≤k≤V+1)}(1≤i≤F,1≤j≤V)表示新的状态。经过修改后,因为q[i,j]=t[i+1,j+1]+a[i,j],而t[i,j]=max{t[i,j+1],q[i,j}(1≤i≤F,1≤j≤V),所以得出新的状态转移方程: t[i,V+1]=-∞(1≤i≤F十1) t[F,j]=max{t[F,j+1],b[F,j]} (1≤j≤V) t[i,j]=max{t[i,j+1],t[i+1,j+1]+a[i,j]} (1≤i≤F,1≤j≤V) 这样,得出的最大美学值为t[1,1],新算法的时间复杂度为O(F*V),而空间复杂度也为O(F*V),完全可以满足1≤F≤V≤100的要求。下面给出这一问题的源程序。 {$A+,B-,D+,E+,F-,G-,I+,L+,N-,O-,P-,Q-,R-,S+,T-,V+,X+} {$M16384,0,655360} program ex;{花店橱窗布置问题} const st1='flower.inp'; {输入文件名} st2='flower.out'; {输出文件名} var f,v:integer; {f为花束的数量;v为花瓶的数量} b:array[1..100,1..100] of shortint; {b[i,j]为第i束花放进第j个花瓶的美学值} t:array[1..101,1..101] of integer; {t[i,¨为将第i到第f束花放进第j到第v个花瓶所可能得到的最大美学值} procedure readp; {从文件中读入不同花束对应不同花瓶的美学值} var f1:text; i,j:integer; begin assign(f1,st1);reset(f1); readln (f1, f, v); for i:=1 to f do for j:=1 to v do read (f1, b [i, j]); close (f1); end; procedure main; {用动态规划对问题求解} var i, j: integer; begin for i:=1 to f+1 do t[i, v+1]:=-9999; for j:=v downto 1 do if t[f, j+l] > b[f, j] then t[f,j]:=t[f, j+1] else t[f,j]:=b[f,j]; {设定动态规划的初始条件,其中-9999表示负无穷} for i:=f-1 downto 1 do for j:= v downto 1 do begin t[i, j]:=t[i, j+1]; if t[i+1, j+1] + b[i, j] > t[i, j] then t[i, j]:=t[i+1, j+1] +b[i, j]; end; end; procedure print; {将最佳美学效果和对应方案输出到文件} var f1: text; i,j,p: integer; {为当前需确定位置的花束编号,p为第i束花应插入的花瓶编号的最小值} begin assign (f1, st2); rewrite (f1); writeln (f1, t [1, 1]); p:=1; for i:=1 to f do begin {用循环依次确定各束花应插入的花瓶} j:=p; while t[i, j] =t[i, p] do inc (j); write (f1, j-1,' '); p:=j; end; writeln (f1); close (f1); end; begin readp; main; print; end. 由此可看出,对于看似复杂的问题,通过转化就可变成简单的经典的动态规划问题。在问题原型的基础上,通过分析新问题与原问题的不同之处,修改状态转移方程,改变问题状态的描述和表示方式,就会降低问题规划和实现的难度,提高算法的效率。由此可见,动态规划问题中具体的规划方法将直接决定解决问题的难易程度和算法的时间与空间效率,而注意在具体的规划过程中的灵活性和技巧性将是动态规划方法提出的更高要求。 动态规划的深入思考——时间效率 动态规划是一种重要的程序设计思想,具有广泛的应用价值。使用动态规划思想来设计算法,对于不少问题的解决往往具有高时效,从理论上讲,对于规模为N的问题,搜索算法的时间复杂度为O(N!),“动态规划”算法的时间复杂度是O (N2)。这两个时间根本就不是一个数量级的,因而,对于能够使用动态规划思想来解决的问题,使用动态规划是比较明智的选择。 动态规划之所以具有高时效,是因为它在将问题规模不断减小的同时,有效地把解记录下来,从而避免了反复解同一个子问题的现象,因而只要运用得当,较之搜索而言,效率就会有很大的提高。 现在,回头看看例题2的求解最短路径问题的解法,这个问题当然可以用搜索方法来做,程序也很容易编写出来,这里,先给出搜索方法解决这一问题的算法如下:设:dis[X]为城市X到E的最短路线的长度;(X表示任意一个城市) map[I,J]表示I,J两个城市间的距离,若map[I,J]=0,则两个城市不连通。 Var se:未访问的城市集合; Function distance(who:当前访问城市):integer;求当前访问城市与城市E的最短距离。 begin lf who=E then search:=0 Else begin min:=maxint; For I 取遍所有城市 do lf (map[who,I]>0) and (i in se) then begin se:=se[i];j:=map[who,I]+Long(I);se:=se+[I]; IF J < Min then min:=J; end; distance:=min; end; end; begin se:=除A外所有城市的集合; dis[A]:=distance(A); end. 从上述算法中可以看到,每次除了已经访问过的城市外,其他城市都要访问。例如,在求从B1到E的最短路径的时候,先求出从C2到E的最短路径;而在求从 B2到E的最短路径的时候,又求了一遍从C2到E的最短路径。也就是说,从C2到 E的最短路径求了两遍。同样可以发现,在求从C1、C2到E的最短路径的过程中,从D1到E的最短路径也被求了两遍。而在整个程序中,从D1到E的最短路径被求了四遍,整个过程中做了大量的重复工作。因此,整个算法的时间复杂度为O (N!),显然是一个“指数级”的算法。 通过前面的学习,已知最短路问题是一个满足最优话化原理和无后效性的问题,因此,可以用动态规划方法求解,以下是动态规划方法的算法描述: (有关变量定义同搜索算法) dis[E]=0{初始化} For X=阶段3的每个城市downto阶段0的每个城市 Do begin dis[X]:=maxint; For Y=阶段X的下一个阶段中的每个城市 do If dis[Y]+map[X,Y] < dis[X] Then dis[X]:=dis[Y]+map[X,Y]; end; 从上述算法中可以看出,在求解的过程中,同时将求得的最短路径的距离存储下来,随时调用,同时,算法只需要一个双重循环就可以完成,因此算法的时间复杂为O(N2),比搜索算法的时间复杂度要小得多。 正是因为动态规划方法在时间效率上的优势,在竞赛中,经常出现用动态规划求解的问题。近年来,动态规划问题的隐蔽性越来越大,所以在思考问题的解决办法时,如果问题对于算法的时间要求较高时,就必须要考虑清楚,切不可凭第一感觉便下手,而要多进行分析,找出最佳的方法,这时动态规划方法不失为一种较好的选择。 动态规划与其他算法的比较 动态规划与其说是一种算法,不如说是一种算法设计的策略,他的基本思想体现于许多其它算法之中。下面我们通过比较动态规划和其他的一些算法之间的相互联系,来深入理解动态规划的基本思想。 动态规划与静态规划的关系 动态规划与静态规划(线性和非线性规划等)研究的对象本质上都是在若干约束条件下的函数极值问题。两种规划在很多情况下原则上可以相互转换。 动态规划可以看作求决策u1,u2,...,u n,使指标函数V1n(x l,u1,u2,...,u n)达到最优(最大或最小)的极值问题,状态转移方程、端点条件以及允许状态集、允许决策集等是约束条件,原则上可以用非线性规划方法求解。 一些静态规划只要适当引入阶段变量、状态、决策等就可以用动态规划方法求解。下面用例子说明: [例8]用动态规划解下列非线性规划: 其中g k(u k)为任意的已知函数。 解:按变量u k的序号k划分阶段,看作n段决策过程;设状态为x1,x2,..x n,取问题中的变量u1,u2,..,u n为决策;状态转移方程为: 取g k(u k)为阶段指标,最优值函数的基本方程为(注意到x n+1=0): 解此动态规划即可得到原静态规划的解。 动态规划算法原理及其应用研究 系别:x x x 姓名:x x x 指导教员: x x x 2012年5月20日 摘要:动态规划是解决最优化问题的基本方法,本文介绍了动态规划的基本思想和基本步骤,并通过几个实例的分析,研究了利用动态规划设计算法的具体途径。关键词:动态规划多阶段决策 1.引言 规划问题的最终目的就是确定各决策变量的取值,以使目标函数达到极大或极小。在线性规划和非线性规划中,决策变量都是以集合的形式被一次性处理的;然而,有时我们也会面对决策变量需分期、分批处理的多阶段决策问题。所谓多阶段决策问题是指这样一类活动过程:它可以分解为若干个互相联系的阶段,在每一阶段分别对应着一组可供选取的决策集合;即构成过程的每个阶段都需要进行一次决策的决策问题。将各个阶段的决策综合起来构成一个决策序列,称为一个策略。显然,由于各个阶段选取的决策不同,对应整个过程可以有一系列不同的策略。当过程采取某个具体策略时,相应可以得到一个确定的效果,采取不同的策略,就会得到不同的效果。多阶段的决策问题,就是要在所有可能采取的策略中选取一个最优的策略,以便得到最佳的效果。动态规划是一种求解多阶段决策问题的系统技术,可以说它横跨整个规划领域(线性规划和非线性规划)。在多阶段决策问题中,有些问题对阶段的划分具有明显的时序性,动态规划的“动态”二字也由此而得名。动态规划的主要创始人是美国数学家贝尔曼(Bellman)。20世纪40年代末50年代初,当时在兰德公司(Rand Corporation)从事研究工作的贝尔曼首先提出了动态规划的概念。1957年贝尔曼发表了数篇研究论文,并出版了他的第一部著作《动态规划》。该著作成为了当时唯一的进一步研究和应用动态规划的理论源泉。在贝尔曼及其助手们致力于发展和推广这一技术的同时,其他一些学者也对动态规划的发展做出了重大的贡献,其中最值得一提的是爱尔思(Aris)和梅特顿(Mitten)。爱尔思先后于1961年和1964年出版了两部关于动态规划的著作,并于1964年同尼母霍思尔(Nemhauser)、威尔德(Wild)一道创建了处理分枝、循环性多阶段决策系统的一般性理论。梅特顿提出了许多对动态规划后来发展有着重要意义的基础性观点,并且对明晰动态规划路径的数 职业规划八大经典图书推荐 关于职业规划学习与指导的读物推荐。生涯设计公益网(https://www.360docs.net/doc/0018535457.html,)大学生职业生涯规划专题组推荐。 职业规划八大读物: 1、《我的生涯手册》吴芝仪经济日报出版社 简介:本书涵盖了自我探索、工作世界探索、家庭期待与沟通、生涯选择与决定、生涯愿景与规划、生涯准备与行动等与个人生涯发展息息相关的重要议题。旨在藉由循序渐进的个别或团体活动,以辅助青少年或大专学生的自我学习,并可运用于生涯辅导课程等工作规划坊中作为学习教材。 推介:我是一个什么样的人?我喜欢什么?我擅长做些什么?我适合从事什么样的职业?在选择与被选择之间我该如何抉择?生涯手册,做最好的自己。如果你还年轻,这本书将引导你认真规划一生;如果你步入中年,这本书让你反思过去,开创更美好的未来。 2、《你的降落伞是什么颜色》理查德?尼尔森?鲍利斯中信出版社彭书淮译 简介:如果你正在求职或者打算跳槽,这是一本你无论如何不应错过的著作,否则你将错过:聆听全世界最权威的职业指导大师30年研究心得的机会;了解如自己这般杰出的优秀人才为何屡屡在求职场上铩羽而归的原因;洞悉现存求职体系薄弱内幕的良机;走出求职误区的可能;领会最有效的求职思路和方法的机会……如果你阅读了此书,你至少将了解:现有的求职系统是过时而低效的,如果你首先求助了它,会毫无疑问地成为这一陈腐体系的牺牲品;简历、招聘广告、职业介绍所和猎头公司,它们所起的作用远比你以为的要小得多,甚至遍布陷阱;其实最有效的求职途径唾手可得,你甚至可以不用投寄一份简历就可以找到最理想的工作;人们高估了互联网在求职中的作用,实际上它的失败率是96%…… 推介:理查德?尼尔森?鲍利斯,职业指导大师、畅销书作家,他改变了数百万人看待他们工作和生活的方式,这当中有职业顾问、社会工作者、行政官员、教师和其他陷入茫然和自我怀疑的求职者和跳槽者。同行评价说:“他值得这30年间他帮助过的所有人尊敬。” 3、《把握你的职业发展方向》RobertD?Lock中国轻工业出版社钟谷兰等译 简介:帮助读者在设立职业目标的同时,更教会读者一整套职业决策技能。它不仅说明了什么是“职业生涯规划”,更一步步地带领读者通过阅读、思考、各种练习、活动和量表,认识工作世界,了解具体职业,探索自我,并最终做出正确的职业决策。本书中还包括大量权威的职业量表及其使用方法,有很高的参考价值。 推介:全书在科学性和学术性的前提下,具有很强的实用性和操作性。在职业规划类图书上中,本书以其全面的内容、逻辑性的叙述,富有激情的语言,被使用者广泛接受。 4、《职业转换》卡罗尔L?麦克莱兰机械工业出版社北京燕清联合传媒管理咨询中心译 简介:本书是“阿呆系列”丛书中的一本。该书主要面向有意于进行职业转换的人们,介绍了职业转换的意义、步骤和方法。本书采用循序渐近的手法,从对成功的定义谈起,向读者介绍了新时期职业转换的特点和目标。随后,作者针对在职业转换中可能出现的问题提出了建议和对策——为了积极参与职业转换,你需要发现自己的激情。在了解了自己的激情所在之后,需要寻找适合自己的职业领域。在这一部分,作者多方面、多角度地对新的职业领域进行了简洁、生动的描述。同时,作者还提供了每一职业领域的相关专业和工作,以及可供参考的相关机构的联络方法。为了更好的将各职业领域有机地结合起来,并为读者提供更具实用性的参考,作者逐一介绍了进行职业转换所需的综合素质和能力方面的培训和实践锻炼。最后,作者还提出了极具借鉴意义的在职业转换过程中保持头脑清醒的10个秘诀和 动态规划讲解大全 动态规划(dynamic programming)是运筹学的一个分支,是求解决策过程(decision process)最优化的数学方法。20世纪50年代初美国数学家R.E.Bellman等人在研究多阶段决策过程(multistep decision process)的优化问题时,提出了著名的最优化原理(principle of optimality),把多阶段过程转化为一系列单阶段问题,逐个求解,创立了解决这类过程优化问题的新方法——动态规划。1957年出版了他的名著Dynamic Programming,这是该领域的第一本著作。 动态规划问世以来,在经济管理、生产调度、工程技术和最优控制等方面得到了广泛的应用。例如最短路线、库存管理、资源分配、设备更新、排序、装载等问题,用动态规划方法比用其它方法求解更为方便。 虽然动态规划主要用于求解以时间划分阶段的动态过程的优化问题,但是一些与时间无关的静态规划(如线性规划、非线性规划),只要人为地引进时间因素,把它视为多阶段决策过程,也可以用动态规划方法方便地求解。 动态规划程序设计是对解最优化问题的一种途径、一种方法,而不是一种特殊算法。不象前面所述的那些搜索或数值计算那样,具有一个标准的数学表达式和明确清晰的解题方法。动态规划程序设计往往是针对一种最优化问题,由于各种问题的性质不同,确定最优解的条件也互不相同,因而动态规划的设计方法对不同的问题,有各具特色的解题方法,而不存在一种万能的动态规划算法,可以解决各类最优化问题。因此读者在学习时,除了要对基本概念和方法正确理解外,必须具体问题具体分析处理,以丰富的想象力去建立模型,用创造性的技巧去求解。我们也可以通过对若干有代表性的问题的动态规划算法进行分析、讨论,逐渐学会并掌握这一设计方法。 基本模型 多阶段决策过程的最优化问题。 在现实生活中,有一类活动的过程,由于它的特殊性,可将过程分成若干个互相联系的阶段,在它的每一阶段都需要作出决策,从而使整个过程达到最好的活动效果。当然,各个阶段决策的选取不是任意确定的,它依赖于当前面临的状态,又影响以后的发展,当各个阶段决策确定后,就组成一个决策序列,因而也就确定了整个过程的一条活动路线,如图所示:(看词条图) 这种把一个问题看作是一个前后关联具有链状结构的多阶段过程就称为多阶段决策过程,这种问题就称为多阶段决策问题。 记忆化搜索 给你一个数字三角形, 形式如下: 1 2 3 4 5 6 7 8 9 10 找出从第一层到最后一层的一条路,使得所经过的权值之和最小或者最大. 无论对与新手还是老手,这都是再熟悉不过的题了,很容易地,我们写出状态转移方程:f(i, j)=a[i, j] + min{f(i+1, j),f(i+1, j + 1)} 对于动态规划算法解决这个问题,我们根据状态转移方程和状态转移方向,比较容易地写出动态规划的循环表示方法。但是,当状态和转移非常复杂的时候,也许写出循环式的动态规划就不是那么 大学生职业生涯规划书 目录 前言 一、自我认识与了解 (一)霍兰德职业兴趣特点,推荐的职业 (二)MBTI职业性格测试结果、特点,推荐的职业 (三)职业能力分析:专业知识技能、可操作技能、自我管理技能(四)我追求的核心职业价值观 (五)访谈得到的启示和自我评价 (六)他人对我的评价 (七)职业环境分析 二、对自我未来职业的规划和设计 (一)社会能提供的行业、机会、岗位 (二)职业目标和岗位定位 (三)职业规划 (四)职业前景的SWOT分析 (五)职业准备和对策分析 (六)职业生涯的反馈与修正 三、从职业分析得中到的启示与领悟 四、结束语 前言 现代社会是一个经济迅速发展的社会,也是一个充满竞争的社会,提前做好自己的规划会为我们更好的适应社会打下基础,作为新时代的大学生,就应该对社会有一个清醒的认识,对现在的就业形式,社会的的政治环境、经济环境、文化环境等等,对自己的性格能力都应有清醒的认识,只有这样我们才能更好适应社会,为社会做出更大的贡献,更好的实现自己的人生价值。大学生认识到生涯规划的重要意义,职业生涯活动将伴随我们的大半生,拥有成功的职业生涯才能实现完美人生。因此,职业生涯规划具有特别重要的意义。古人说:“有志不在年高而无志空活百年。”其实人生何需百年?只要我们能像阿基米德寻找地球支点一样给我们的灵魂一个支点,那么激跃生命的腾飞还不是易如反掌吗?这个支点就是规划人生。遗憾的是我们往往不能或者不敢给人生一个规划,前路迷茫,没有人生规划这座灯塔的指引,我们能找到前进的方向吗?扑面而来的风风雨雨,我们能挺得过去吗?或者会误入歧途,一失足成千古恨呢?由此可见,为我们的人生做一个正确的人生规划,那是必要的! 没有方向的船,任何方向吹来的风都是逆风。有一个合理的职业生涯规划,犹如航船有了方向,在明确的职业发展目标之下,采取可行的步骤与措施,不断增强职业竞争力,才能让我们在激烈的竞争中脱颖而出,提高成功的机会,实现自己的职业理想。 一、自我认识与了解 (一)霍兰德职业兴趣特点,推荐的职业 1.性格特征 这一类人喜欢思考,有思想,喜爱原创,渴望表现自己的个性,实现自身的价值。你们很有艺术才华,气场强大,往往追求完美,做事要求如理想般完成。你们通常表情丰富、情绪发生迅速而丰富多变;反应敏捷、对新事物敏感,但可能会不那么深刻。并且你们喜欢与人打交道,在人群中总是精力充沛,喜欢去影响他人、控制他人,具有领导才能,一般具有说服力。有时候你们也会表现出征服和支配的野心。 2.兴趣特长 实验报告 (2009/2010学年第一学期) 课程名称算法分析与设计A 实验名称动态规划法 实验时间2009 年11 月20 日指导单位计算机学院软件工程系 指导教师张怡婷 学生姓名丁力琪班级学号B07030907 学院(系) 计算机学院专业软件工程 实验报告 实验名称动态规划法指导教师张怡婷实验类型验证实验学时2×2实验时间2009-11-20一、实验目的和任务 目的:加深对动态规划法的算法原理及实现过程的理解,学习用动态规划法解决实际应用中的最长公共子序列问题。 任务:用动态规划法实现求两序列的最长公共子序列,其比较结果可用于基因比较、文章比较等多个领域。 要求:掌握动态规划法的思想,及动态规划法在实际中的应用;分析最长公共子序列的问题特征,选择算法策略并设计具体算法,编程实现两输入序列的比较,并输出它们的最长公共子序列。 二、实验环境(实验设备) 硬件:计算机 软件:Visual C++ 三、实验原理及内容(包括操作过程、结果分析等) 1、最长公共子序列(LCS)问题是:给定两个字符序列X={x1,x2,……,x m}和Y={y1,y2,……,y n},要求找出X和Y的一个最长公共子序列。 例如:X={a,b,c,b,d,a,b},Y={b,d,c,a,b,a}。它们的最长公共子序列LSC={b,c,d,a}。 通过“穷举法”列出所有X的所有子序列,检查其是否为Y的子序列并记录最长公共子序列并记录最长公共子序列的长度这种方法,求解时间为指数级别的,因此不可取。 2、分析LCS问题特征可知,如果Z={z1,z2,……,z k}为它们的最长公共子序列,则它们一定具有以下性质: (1)若x m=y n,则z k=x m=y n,且Z k-1是X m-1和Y n-1的最长公共子序列; (2)若x m≠y n且x m≠z k,则Z是X m-1和Y的最长公共子序列; (3)若x m≠y n且z k≠y n,则Z是X和Y的最长公共子序列。 这样就将求X和Y的最长公共子序列问题,分解为求解较小规模的问题: 若x m=y m,则进一步分解为求解两个(前缀)子字符序列X m-1和Y n-1的最长公共子序列问题; 如果x m≠y n,则原问题转化为求解两个子问题,即找出X m-1和Y的最长公共子序列与找出X 和Y n-1的最长公共子序列,取两者中较长者作为X和Y的最长公共子序列。 由此可见,两个序列的最长公共子序列包含了这两个序列的前缀的最长公共子序列,具有最优子结构性质。 3、令c[i][j]保存字符序列X i={x1,x2,……,x i}和Y j={y1,y2,……,y j}的最长公共子序列的长度,由上述分析可得如下递推式: 0 i=0或j=0 c[i][j]= c[i-1][j-1]+1 i,j>0且x i=y j max{c[i][j-1],c[i-1][j]} i,j>0且x i≠y j 由此可见,最长公共子序列的求解具有重叠子问题性质,如果采用递归算法实现,会得到一个指数时间算法,因此需要采用动态规划法自底向上求解,并保存子问题的解,这样可以避免重复计算子问题,在多项式时间内完成计算。 4、为了能由最优解值进一步得到最优解(即最长公共子序列),还需要一个二维数组s[][],数组中的元素s[i][j]记录c[i][j]的值是由三个子问题c[i-1][j-1]+1,c[i][j-1]和c[i-1][j]中的哪一个计算得到,从而可以得到最优解的当前解分量(即最长公共子序列中的当前字符),最终构造出最长公共子序列自身。 人力资源管理职业生涯规划书【1】 一、自我分析 性格探索:我喜欢挑战和让我兴奋的事情,聪慧,许多事情都比较拿手,致力于自己才干和能力的增长。我有很强的创造性和主动性,绝大多数是事业型的。我好奇心强,喜欢新鲜事物,关注事物的意义和发展的 可能性。通常把灵感看得比什么都重要,多才多艺,适应性强且知识渊博,很善于处理挑战性的问题。我善 于快速抓住事物的本质,喜欢从新的角度和独到的方式思考问题,对问题经常有自己独到的见解。我机警而 坦率,有杰出的分析能力,并且是优秀的策略家。我不喜欢条条框框的限制和因循守旧的工作方式,习惯便 捷的问题解决方法。我喜欢自由的生活并善于发现其中的乐趣和变化。 学习风格探索:我是一个运动型的,我能从新体验、新问题、新机遇中学习。我能全神贯注于短时间的、当时当地的活动,诸如商业游戏、竞赛型的团队任务、及角色扮演练习。活动中充满了刺激性、戏剧性、危 机和变化无常的事情,且有一系列多种多样的活动需要应对。我能引人注目,如主持会议,主导讨论或进行 陈述。我与他人打交道,我思维跳跃,并作为团队的一分子解决问题。在活动中适合尝试一下。 兴趣探索:我对经营事务很有兴趣,也非常喜欢与人打交道,有支配欲,喜欢影响和感染他人。喜好表达、说服,做事积极而有计划,以工作为导向,关心绩效与表现,但也重视个人与群体间的契合,人际关系 良好,喜欢与人相处,并希望自己能成为团体中的焦点人物。对新鲜的事物很感兴趣,关心的问题广泛,但 对机器、物品生产制造技术则较缺乏兴趣,喜欢直觉思考与分析。我志在与人有关的服务机构中,担任经营、管理与决策等相关职务,协助机构谋取合理的利润。我在日常生活中与同事相处友好,可有效的控制他人, 待人热情,乐于助人,善于与别人建立亲密关系,行为大方慷慨,态度和蔼可亲,处事周密,得体,处理各 种复杂人际关系游刃有余,对自己的行为有责任感,受人尊重,受人欢迎,对金钱权力和他人感兴趣。 适宜的成长环境:经营性活动,需要较多人际交往的工作,要求责任与权力的明确、统一,给予个人努 力成就的机会。 喜欢的课程或活动:团体活动、政论聚会、经营管理等。 有兴趣的学科:法律、政治、外语、教育、传播、企业管理、财经等。 喜欢的职业:服务业经理、保险业务员、律师、法官、公关经理等。 价值观报告:我最突出的价值观是赞誉赏识,崇尚独立。希望的工作是具有不确定性的,在这种不确定 性中可以充分发挥自己的创造力;期望在工作中拥有比较自由的空间,能够尝试使用自己的新想法;希望工作 具有较多的自由,可以自己支配安排自己工作的步骤与进度;希望工作范畴内的事务自己可以较自由决策;希 望工作是项目制,从而拥有充分的工作支配权。我非常希望获得有充分保障的工作(包括拥有良好的工作条 动态规划是对最优化问题的一种新的算法设计方法。由于各种问题的性质不同,确定最优解的条件也互不相同,因而动态规划的没计法对不同的问题,有各具特色的表示方式。不存在一种万能的动态规划算法。但是可以通过对若干有代表性的问题的动态规划算法进行讨论,学会这一设计方法。 多阶段决策过程最优化问题 ——动态规划的基本模型 在现实生活中,有一类活动的过程,由于它的特殊性,可将过程分成若干个互相联系的阶段,在它的每一阶段都需要作出决策,从而使整个过程达到最好的活动效果。因此各个阶段决策的选取不能任意确定,它依赖于当前面临的状态,又影响以后的发展。当各个阶段决策确定后,就组成一个决策序列,因而也就确定了整个过程的一条活动路线。这种把一个问题看做是一个前后关联具有链状结构的多阶段过程就称为多阶段决策过程,这种问题称为多阶段决策最优化问题。 【例题1】最短路径问题。图中给出了一个地图,地图中每个顶点代表一个城市,两个城市间的连线代表道路,连线上的数值代表道路的长度。现在,想从城市A到达城市E,怎样走路程最短,最短路程的长度是多少? 【分析】把从A到E的全过程分成四个阶段,用k表示阶段变量,第1阶段有一个初始状态A,两条可供选择的支路ABl、AB2;第2阶段有两个初始状态B1、 B2,B1有三条可供选择的支路,B2有两条可供选择的支路……。用dk(x k,x k+1)表示在第k阶段由初始状态x k到下阶段的初始状态x k+1的路径距离,Fk(x k)表示从第k阶段的x k到终点E的最短距离,利用倒推方法求解A到E的最短距离。具体计算过程如下: S1:K=4,有:F4(D1)=3,F4(D2)=4,F4(D3)=3 S2: K=3,有: F3(C1)=min{d3(C1,D1)+F4(D1),d3(C1,D2)+F4(d2)}=min{8,10}=8 F3(C2)=d3(C2,D1)+f4(D1)=5+3=8 F3(C3)=d3(C3,D3)+f4(D3)=8+3=11 F3(C4)=d3(C4,D3)+f4(D3)=3+3=6 2设计动态规划算法的主要步骤为: (1)找出最优解的性质,并刻划其结构特征。(2)递归地定义最优值。(3)以自底向上的方式计算出最优值。(4)根据计算最优值时得到的信息,构造最优解。 3. 分治法与动态规划法的相同点是:将待求解的问题分解成若干个子问题,先求解子问题,然后从这些子问题的解得到原问题的解。 两者的不同点是:适合于用动态规划法求解的问题,经分解得到的子问题往往不是互相独立的。而用分治法求解的问题,经分解得到的子问题往往是互相独立的。 贪心选择算法与动态规划算法的异同点:同:都要求问题具有最优子结构性质;异:动态规划算法为自底向上的方式解各子问题,贪心算法为自顶向下的方式进行,以迭代的方式作出相继的贪心选择,每做一次贪心选择问题就转换为规模更小的字问题。 6. 分治法所能解决的问题一般具有的几个特征是:(1)该问题的规模缩小到一定的程度就可以容易地解决; (2)该问题可以分解为若干个规模较小的相同问题,即该问题具有最优子结构性质; (3)利用该问题分解出的子问题的解可以合并为该问题的解; (4)原问题所分解出的各个子问题是相互独立的,即子问题之间不包含公共的子问题。 P:也即是多项式复杂程度的问题。 NP就是多项式复杂程度的非确定性问题。 NPC(NP Complete)问题 ADT 抽象数据类型 分析问题→设计算法→编写程序→上机运行和测试 算法特性1. 确定性、可实现性、输入、输出、有穷性 算法分析目的2. 分析算法占用计算机资源的 情况,对算法做出比较和评价,设计出额更好 的算法。 3. 算法的时间复杂性与问题的规模相关,是 问题大小n的函数。 算法的渐进时间复杂性的含义:当问题的规模 n趋向无穷大时,影响算法效率的重要因素是 T(n)的数量级,而其他因素仅是使时间复杂度 相差常数倍,因此可以用T(n)的数量级(阶) 评价算法。时间复杂度T(n)的数量级(阶)称为 渐进时间复杂性。 最坏情况下的时间复杂性和平均时间复杂性有什么不同? 最坏情况下的时间复杂性和平均时间复杂性 考察的是n固定时,不同输入实例下的算法所 耗时间。最坏情况下的时间复杂性取的输入实 例中最大的时间复杂度: W(n) = max{ T(n,I) } , I∈Dn 平均时间复杂性是所有输入实例的处理时间 与各自概率的乘积和: A(n) =∑P(I)T(n,I) I∈Dn 为什么要分析最坏情况下的算法时间复杂 性?最坏情况下的时间复杂性决定算法的优 劣,并且最坏情况下的时间复杂性较平均时间 复杂性游可操作性。 1.贪心算法的基本思想? 是一种依据最优化量度依次选择输入的分级处理方法。基本思路是:首先根据题意,选取一种量度标准;然后按这种量度标准对这n个输入排序,依次选择输入量加入部分解中。如果当前这个输入量的加入,不满足约束条件,则不把此输入加到这部分解中。 贪心选择算法与动态规划算法的异同点:同:都要求问题具有最优子结构性质;异:动态规划算法为自底向上的方式解各子问题,贪心算法为自顶向下的方式进行,以迭代的方式作出相继的贪心选择,每做一次贪心选择问题就转换为规模更小的字问题。 亲爱的朋友,很高兴能在此相遇!欢迎您阅读文档大学生职业生涯规划书,这篇文档是由我们精心收集整理的新文档。相信您通过阅读这篇文档,一定会有所收获。假若亲能将此文档收藏或者转发,将是我们莫大的荣幸,更是我们继续前行的动力。 大学生职业生涯规划书 大学生职业生涯规划书(精选3篇) 时间的脚步是无声的,它在不经意间流逝,我们又有了新的工作,请一起努力,写一份职业规划吧。那么你知道职业规划是用什么方法吗?以下是我们精心整理的大学生职业生涯规划书(精选3篇),欢迎大家借鉴与参考,希望对大家有所帮助。 大学生职业生涯规划书1 如今,身为大学生的我们,在一天天消磨时光的日子里,不如抓紧时间多学一些知识来充实自己。人的大学时光一生中也许就一次,不把握好,将来自己一定回追悔莫及。于是,再经过一番深思熟虑之后,我决定把自己的未来设计一下。有了目标,才会有动力。 一、自我盘点 1、自己兴趣爱好大盘点:业余爱好读书、听音乐、无线电维修、画画;喜欢的文学作品《红楼梦》、《战争与和平》、《老人与海》、《平凡的世界》;喜欢的歌曲《爱拼才会赢》、《红日》、《流 年》。 2、自己优势盘点:学习成绩优秀,担任班干部,班级群众基础好,父母、亲人、班主任、任课老师关爱,动手能力较强。 3、自己劣势盘点:目前的手头经济状况较为窘迫,海拔高度不够,体质偏弱。 4、自己的优点盘点:做事仔细认真、踏实,友善待人,做事锲而不舍,勤于思考,考虑问题全面。 5、自己缺点盘点:性格偏内向,交际能力较差,过于执着偏固执,胆小,思想上属保守派,缺乏自信心和冒险精神,积极主动性不够,做事爱拖拉机,惰性较大。 6、生活中成功经验的盘点:成功竞选成为班支委一员,成功组织过学习研讨主题班会并获年级组评选第一名,个人学习成绩、综合积分均为班级第一,通过考核以较大优势加入系学生实验室,工作中全班同学的悉心支持是我最大的财富。 7、生活中失败的教训:高考失利打击较大,一位好朋友与我有误解而陌路,竞选系学习部长失利,老听别人侃侃而谈可接不上话,心里特难受。 二、解决自我盘点中的劣势和缺点 所谓江山易改,本性难移。内向并非全是缺点,使我少一份张扬,多一点内敛,但可相应加强与他人的交流沟通,积极参加 《算法设计与分析》课程报告 课题名称:动态规划——编辑距离问题 课题负责人名(学号): 同组成员名单(角色):无 指导教师:左劼 评阅成绩: 评阅意见: 提交报告时间:2010年 6 月 23 日 动态规划——编辑距离问题 计算机科学与技术专业 学生指导老师左劼 [摘要]动态规划的基本思想与分治法类似,也是将待求解的问题分解成若干份的子问题,先分别解决好子问题,然后从子问题中得到最终解。但动态规划中的子问题往往不是相互独立的,而是彼此之间有影响,因为有些子问题可能要重复计算多次,所以利用动态规划使这些子问题只计算一次。将字符串A变换为字符串所用的最少字符操作数称为字符串A到B的编辑距离。 关键词:动态规划矩阵字符串操作数编辑距离 一、问题描述 1、基本概念:设A和B是2个字符串。要用最少的字符操作将字符串A转换为字符串B。字符串操作包括: (1) 删除一个字符; (2) 插入一个字符; (3) 将一个字符改为另一个字符。 将字符串A变换为字符串B所用的最少字符操作数称为字符串A 到B的编辑距离,记为d(A,B)。 2、算法设计:设计一个有效算法,对于给定的任意两个字符串A 和B,计算其编辑距离d(A,B)。 3、数据输入:输入数据由文件名为input.txt的文本文件提供。文件的第1行为字符串A,第二行为字符串B。 4、结果输出:将编辑距离d(A,B)输出到文件ouput.txt的第一行。 输入文件示例输出文件示例 input.txt output.txt fxpimu 5 xwrs 二、分析 对于本问题,大体思路为:把求解编辑距离分为字符串A从0个字符逐渐增加到全部字符分别想要变为字符串B该如何变化以及变化的最短距离。 具体来说,首先选用数组a1存储字符串A(设长度为n),a2存储字符串B(设长度为m),d矩阵来进行具体的运算;这里有两个特殊情况比较简单可以单独考虑,即A的长度为0而B不为0还有A不为0B为0,这两种情况最后的编辑距离分别为m和n;讨论一般情况,d矩阵为d[n][m],假定我们从d[0][0]开始一直进行以下操作到了d[i][j]的位置,其中删除操作肯定是A比B长,同理,插入字符操作一定是A比B短,更改字符操作说明一样长,我们所要做的是对d[i][j-1] 第七章动态规划 规划问题的最终目的就是确定各决策变量的取值,以使目标函数达到极大或极小。在线性规划和非线性规划中,决策变量都是以集合的形式被一次性处理的;然而,有时我们也会面对决策变量需分期、分批处理的多阶段决策问题。所谓多阶段决策问题是指这样一类活动过程:它可以分解为若干个互相联系的阶段,在每一阶段分别对应着一组可供选取的决策集合;即构成过程的每个阶段都需要进行一次决策的决策问题。将各个阶段的决策综合起来构成一个决策序列,称为一个策略。显然,由于各个阶段选取的决策不同,对应整个过程可以有一系列不同的策略。当过程采取某个具体策略时,相应可以得到一个确定的效果,采取不同的策略,就会得到不同的效果。多阶段的决策问题,就是要在所有可能采取的策略中选取一个最优的策略,以便得到最佳的效果。动态规划(dynamic programming)同前面介绍过的各种优化方法不同,它不是一种算法,而是考察问题的一种途径。动态规划是一种求解多阶段决策问题的系统技术,可以说它横跨整个规划领域(线性规划和非线性规划)。当然,由于动态规划不是一种特定的算法,因而它不象线性规划那样有一个标准的数学表达式和明确定义的一组规则,动态规划必须对具体问题进行具体的分析处理。在多阶段决策问题中,有些问题对阶段的划分具有明显的时序性,动态规划的“动态”二字也由此而得名。动态规划的主要创始人是美国数学家贝尔曼(Bellman)。20世纪40年代末50年代初,当时在兰德公司(Rand Corporation)从事研究工作的贝尔曼首先提出了动态规划的概念。1957年贝尔曼发表了数篇研究论文,并出版了他的第一部著作《动态规划》。该著作成为了当时唯一的进一步研究和应用动态规划的理论源泉。1961年贝尔曼出版了他的第二部著作,并于1962年同杜瑞佛思(Dreyfus)合作出版了第三部著作。在贝尔曼及其助手们致力于发展和推广这一技术的同时,其他一些学者也对动态规划的发展做出了重大的贡献,其中最值得一提的是爱尔思(Aris)和梅特顿(Mitten)。爱尔思先后于1961年和1964年出版了两部关于动态规划的著作,并于1964年同尼母霍思尔(Nemhauser)、威尔德(Wild)一道创建了处理分枝、循环性多阶段决策系统的一般性理论。梅特顿提出了许多对动态规划后来发展有着重要意义的基础性观点,并且对明晰动态规划路径的数学性质做出了巨大的贡献。 动态规划在工程技术、经济管理等社会各个领域都有着广泛的应用,并且获得了显著的效果。在经济管理方面,动态规划可以用来解决最优路径问题、资源分配问题、生产调度问题、库存管理问题、排序问题、设备更新问题以及生产过程最优控制问题等,是经济管理中一种重要的决策技术。许多规划问题用动态规划的方法来处理,常比线性规划或非线性规划更有效。特别是对于离散的问题,由于解析数学无法发挥作用,动态规划便成为了一种非常有用的工具。 动态规划可以按照决策过程的演变是否确定分为确定性动态规划和随机性动态规划;也可以按照决策变量的取值是否连续分为连续性动态规划和离散性动态规划。本教材主要介绍动态规划的基本概念、理论和方法,并通过典型的案例说明这些理论和方法的应用。 §7.1 动态规划的基本理论 1.1多阶段决策过程的数学描述 有这样一类活动过程,其整个过程可分为若干相互联系的阶段,每一阶段都要作出相应的决策,以使整个过程达到最佳的活动效果。任何一个阶段(stage,即决策点)都是由输入(input)、决策(decision)、状态转移律(transformation function)和输出(output)构成的,如图7-1(a)所示。其中输入和输出也称为状态(state),输入称为输入状态,输出称为输出状态。 大学生职业生涯规划书推荐 以下是关于大学生职业生涯规划书推荐的文章!工作计划资源请搜索工作计划与你分享! 俗话说:行行都出状元郎。当今社会竞争日益激烈,各类人才如雨后春笋般破土而出,在综错复杂的社会里生存和发展是最为简单的两个目标,但是终极命运却有天壤之别,的事物不再只是偶然,的是必然。随着大学生普遍化和综合素质的不断提高,让我们在校生有种危机感和紧迫意识,怎样在立足于社会的同时能创造出一定价值是每个人生必须思考的现实问题。在行动之前的准备工作和事物正常发展同等重要,任何人都赞成想好了在做比不想就做或边想边做要更切实际。每个人对未知的命运都期待关注,当听到这个活动时,就觉得是个严肃的人生话题,平静的内心又起波澜,反省的机会再次降临。鉴于此也觉得走好人生第一步也至关重要。 一.自我定位——“正确认识你自己” 1. 自我描述兴趣爱好:看书、写作、音乐、运动等等 性格特点:感性而不失理智,成熟而不失真诚,独立而坚强,能够敏锐的分析对方心理和处事风格,能吃苦,抗压力强,适应能力强,容易接受新鲜事物…… 2.职业兴趣:喜欢从事多变的职业,排斥只做一件事。 例如从政、作家、经商等,只要是能有所建树的事情都是比较感兴趣的职业。能胜任的工作希望是管理,不过需要时间和机遇。 3.价值定位:虽然金钱不是万能的,但没有金钱也是万万不能的。自身价值的体现很大程度取决于你拥有的物质财富,这是人生的第一个追求,当得到时就应该有兼济天下的胸怀,成功转型。对于刚从大学走出社会来说,第一步就是能够立足社会,同时建立可靠人脉和社会经验,在条件允许的情况下,可以有一笔储蓄,当做以后的创业资本。我一直相信,其实每个人都是人才,关键是需要创造机遇去培养,很多时候能改变我们自己的不是别人,就是你自己。 二.环境分析——“当我没有能力去改变环境时,要适应环境,改变自己” 我的家庭条件不理想,父母的期望就是多学知识去改变家庭现状。说实在的在大学期间真的没有学到什么,这与个人意志和学习氛围有关。所以不打算继续深造专业,寻求别的理想职业,只要能创造人生的一个制高点即可。 当今社会,政策开放,无处不充满商机,同样有人群的地方就有他们需要的财富,社会依然残酷和竞争,有作为的人大都摸索出了社会发展的潜在规律,并结合一些实际情况具体执行而已。 三.确立志向——“有志者,事竟成,破釜沉舟,百二 动态规划经典教程 引言:本人在做过一些题目后对DP有些感想,就写了这个总结: 第一节动态规划基本概念 一,动态规划三要素:阶段,状态,决策。 他们的概念到处都是,我就不多说了,我只说说我对他们的理解: 如果把动态规划的求解过程看成一个工厂的生产线,阶段就是生产某个商品的不同的环节,状态就是工件当前的形态,决策就是对工件的操作。显然不同阶段是对产品的一个前面各个状态的小结,有一个个的小结构成了最终的整个生产线。每个状态间又有关联(下一个状态是由上一个状态做了某个决策后产生的)。 下面举个例子: 要生产一批雪糕,在这个过程中要分好多环节:购买牛奶,对牛奶提纯处理,放入工厂加工,加工后的商品要包装,包装后就去销售……,这样没个环节就可以看做是一个阶段;产品在不同的时候有不同的状态,刚开始时只是白白的牛奶,进入生产后做成了各种造型,从冷冻库拿出来后就变成雪糕(由液态变成固态=_=||)。每个形态就是一个状态,那从液态变成固态经过了冰冻这一操作,这个操作就是一个决策。 一个状态经过一个决策变成了另外一个状态,这个过程就是状态转移,用来描述状态转移的方程就是状态转移方程。 经过这个例子相信大家对动态规划有所了解了吧。 下面在说说我对动态规划的另外一个理解: 用图论知识理解动态规划:把动态规划中的状态抽象成一个点,在有直接关联的状态间连一条有向边,状态转移的代价就是边上的权。这样就形成了一个有向无环图AOE网(为什么无环呢?往下看)。对这个图进行拓扑排序,删除一个边后同时出现入度为0的状态在同一阶段。这样对图求最优路径就是动态规划问题的求解。 二,动态规划的适用范围 动态规划用于解决多阶段决策最优化问题,但是不是所有的最优化问题都可以用动态规划解答呢? 一般在题目中出现求最优解的问题就要考虑动态规划了,但是否可以用还要满足两个条件: 最优子结构(最优化原理) 无后效性 最优化原理在下面的最短路径问题中有详细的解答; 什么是无后效性呢? 就是说在状态i求解时用到状态j而状态j就解有用到状态k…..状态N。 而求状态N时有用到了状态i这样求解状态的过程形成了环就没法用动态规划解答了,这也是上面用图论理解动态规划中形成的图无环的原因。 也就是说当前状态是前面状态的完美总结,现在与过去无关。。。 当然,有是换一个划分状态或阶段的方法就满足无后效性了,这样的问题仍然可以用动态规划解。 三,动态规划解决问题的一般思路。 拿到多阶段决策最优化问题后,第一步要判断这个问题是否可以用动态规划解决,如果不能就要考虑搜索或贪心了。当却定问题可以用动态规划后,就要用下面介绍的方法解决问题了:(1)模型匹配法: 最先考虑的就是这个方法了。挖掘问题的本质,如果发现问题是自己熟悉的某个基本的模型,就直接套用,但要小心其中的一些小的变动,现在考题办都是基本模型的变形套用时要小心条件,三思而后行。这些基本模型在先面的分类中将一一介绍。 (2)三要素法 仔细分析问题尝试着确定动态规划的三要素,不同问题的却定方向不同: 先确定阶段的问题:数塔问题,和走路问题(详见解题报告) 先确定状态的问题:大多数都是先确定状态的。 先确定决策的问题:背包问题。(详见解题报告) 一般都是先从比较明显的地方入手,至于怎么知道哪个明显就是经验问题了,多做题就会发现。 (3)寻找规律法: 这个方法很简单,耐心推几组数据后,看他们的规律,总结规律间的共性,有点贪心的意思。 (4)边界条件法 找到问题的边界条件,然后考虑边界条件与它的领接状态之间的关系。这个方法也很起效。 (5)放宽约束和增加约束 这个思想是在陈启锋的论文里看到的,具体内容就是给问题增加一些条件或删除一些条件使问题变的清晰。 第二节动态规划分类讨论 《大学生职业生涯规划》阅读推荐书目 一、教材 1.《大学生就业实用教程—大学生职业发展与就业指导》文厚润编高等教育出版社 2. 《大学生职业生涯规划》黄俊毅等清华大学出版社 3.《大学生职业生涯发展与规划》钟谷兰(北大-北森职业规划丛书)华东师范大学出版社 二、课外阅读 1.《致加西亚的信》(美)阿尔伯特·哈伯德著北京西苑出版社 2.《高效能人士的七个习惯》(美)柯维著,王亦兵等译中国青年出版社 3.《人性的弱点全集》(美)戴尔·卡耐基著中国发展出版社 4.《天才的品性:对美国22位各界精英的访谈》(美)奥里森·马登著中国档案出版社 5.《成功早知道:迈进人生的10种准备》(美)玛利亚·史瑞沃著海南出版社 6.《经营自我》(美)鲍勃·奥伯瑞著三联书店 7.《如何在大学里脱颖而出》(美)卡尔·纽波特著海天出版社 8.《哈佛之光:输赢在自己》(美)维利斯陕西人民教育出版社 9.《与成功有约:全面造就自己》柯维三联书店 10.《世界上最伟大的推销员》(美)奥格.曼狄诺著世界知识出版社 11.《羊皮卷》(美)马丁·科尔著天津社会科学出版社 12.《我的生涯手册》吴芝仪著经济日报出版社 13. 《只要你敢想你就行》(美)皮尔著新世界出版社 14.《做最好的自己》李开复著人民出版社 15.《与未来同行》李开复著人民出版社 16.《马云点评创业》赢在中国项目组中国民主法制出版社 17.《杜拉升职记》李可著陕西师范大学出版社 18.《把握你的职业发展方向》洛克著中国轻工业出版社 19.《有用的聪明》吴淡如著国家文化出版公司 22.《哈佛教授给学生讲的200个心理健康故事》刑群麟,李敏主编中央编译出版社 21.《细节决定成败》汪中求著新华出版社 22.《成长比成功更重要》凌志军著陕西师范大学出版社 23.《幸福的方法》(以)沙哈尔著当代中国出版社 24.《永不言弃》俞敏洪著群言出版社 25.《曾国藩家书》曾国藩四川文艺出版社 26.《选对池塘钓大鱼》[美]雷恩·吉尔森,机械工业出版社27.《你的降落伞是什么颜色》,理查德·尼尔森·鲍利斯,中信出版社。28.《遇见未知的自己》[台湾]张德芬,华夏出版社 29. 《如何进行时间管理》朱帅,北京大学出版社 30. 《生涯心理辅导》,沈之菲,上海教育出版社 31. 李开复给大学生的信 信息学竞赛中的动态规划专题 哈尔滨工业大学周谷越 【关键字】 动态规划动机状态典型题目辅助方法优化方法 【摘要】 本文针对信息学竞赛(面向中学生的Noi以及面向大学生的ACM/ICPC)中的动态规划算法,从动机入手,讨论了动态规划的基本思想和常见应用方法。通过一些常见的经典题目来归纳动态规划的一般作法并从理论上加以分析和说明。并介绍了一些解决动态规划问题时的一些辅助技巧和优化方法。纵观全文可知,动态规划的关键在于把握本质思想的基础上灵活运用。 【目录】 1.动态规划的动机和基本思想 1.1.解决重复子问题 1.2.解决复杂贪心问题 2.动态规划状态的划分方法 2.1.一维状态划分 2.2.二维状态划分 2.3.树型状态划分 3.动态规划的辅助与优化方法 3.1.常见辅助方法 3.2.常见优化方法 4.近年来Noi动态规划题目分析 4.1 Noi2005瑰丽华尔兹 4.2 Noi2005聪聪与可可 4.3 Noi2006网络收费 4.4 Noi2006千年虫 附录参考书籍与相关材料 1.动态规划的动机和基本思想 首先声明,这里所说的动态规划的动机是从竞赛角度出发的动机。 1.1 解决重复子问题 对于很多问题,我们利用分治的思想,可以把大问题分解成若干小问题,然后再把各个小问题的答案组合起来,得到大问题的解答。这类问题的共同点是小问题和大问题的本质相同。很多分治法可以解决的问题(如quick_sort,hanoi_tower等)都是把大问题化成2个以内的不相重复的小问题,解决的问题数量即为∑(log2n / k)。而考虑下面这个问题: USACO 1.4.3 Number Triangles http://122.139.62.222/problem.php?id=1417 【题目描述】 考虑在下面被显示的数字金字塔。 写一个程序来计算从最高点开始在底部任意处结束的路径经过数字的和的最大。每一步可以走到左下方的点也可以到达右下方的点。 7 3 8 8 1 0 2 7 4 4 4 5 2 6 1 在上面的样例中,从7到3到8到7到5的路径产生了最大和:30。 【输入格式】 第一个行包含R(1<= R<=1000) ,表示行的数目。后面每行为这个数字金字塔特定行包含的整数。所有的被供应的整数是非负的且不大于100。 【输出格式】 单独的一行包含那个可能得到的最大的和。 【样例输入】 5 7 3 8 8 1 0 2 7 4 4 4 5 2 6 1 【样例输出】 30 显然,我们同样可以把大问题化成小问题来解决。如样例中最底层的6就可以从次底层 动态规划算法的应用 一、实验目的 1.掌握动态规划算法的基本思想,包括最优子结构性质和基于表格的最优值计算方法。 2.熟练掌握分阶段的和递推的最优子结构分析方法。 3.学会利用动态规划算法解决实际问题。 二、实验内容 题目一:数塔问题 给定一个数塔,其存储形式为如下所示的下三角矩阵。在此数塔中,从顶部出发,在每一节点可以选择向下走还是向右走,一直走到底层。请找出一条路径,使路径上的数值和最大。 输入样例(数塔): 9 15 10 6 8 2 18 9 5 19 7 10 4 16 输出样例(最大路径和): 59 三、实验步骤 (1)需求分析 通过动态规划法解决数塔问题。从顶部出发,在每一节点可以选择向下或者向右走,一直走到底层,以找出一条数值最大的路径。 (2)概要设计 本次实验程序主要用到二维数组,以及通过动态规划法进行比较每个数的大小。主要运用两个for循环语句实现动态规划。 (3)详细设计 第一步,输入给定的二维数组并打印出相应的数组: int array[5][5]={{9}, /* */{12,15}, /* */{10,6,8}, /* */{2,18,9,5}, /* */{19,7,10,4,6}}; int i,j; for(i=0;i<5;i++) { for(j=0;j<5;j++) cout<动态规划算法原理与的应用
职业规划八大经典图书推荐
动态规划讲解大全(含例题及答案)
职业规划书
南京邮电大学算法设计实验报告——动态规划法
人力资源管理职业生涯规划书-推荐
经典算法——动态规划教程
2设计动态规划算法的主要步骤为
大学生职业生涯规划书(推荐)
算法设计动态规划(编辑距离)
动态规划习题
大学生职业生涯规划书推荐
动态规划经典教程
《大学生职业生涯规划》课程推荐阅读书目
动态规划习题精讲
动态规划算法的应用