五邑大学-甘俊英-信号与系统-课后习题-答案
五邑大学-甘俊英-信号与系统-课后习题-答案
(3)
df (t ) dt
(4)
∫ t
?∞
f (τ )d τ 1-4. 判断下列系统是否为线性的、时不变的、因果的?
(1)
y ( t ) = x ( t )u ( t ) (4) y (t ) = (2) y (t ) = x
( 2t )
(3) y (t ) = x (t ) 2
∫ t ?∞
x ( z )dz (5) y (t ) = x (t ? 2 ) + x (2 ? t ) (6) y (t ) = [cos (3t (7) y (t ) = ?
0,t<00,x (t ) < 0? (8) y (t ) = ?
(9)
x (t ) + x (t ? 2), t ≥ 0x (t ) + x (t ? 2 ), x (t ) ≥0??
? y (t ) = x t ( 3) (2)线性,时变,非因果。
(4)线性,时不变,因果。
(6)线性,时变,因果。 (8)非线性,时不变,因果。
解:(1)线性,时变,因果。
(3)非线性,时不变,因果。
(5)线性,时变,非因果。
(7)线性,时不变,因果。
(9)线性,时变,因果。
1-5.
有 一 LTI 系 统 , 当 激 励 x 1 (t ) = u(t ) 时 , 响 应
y 1
(t ) = 6e
?αt
u(t ) , 试 求 当
x 2 (t ) = 3tu (t ) + 2δ (t ) 时,响应 y 2 (t ) 的表示式。
(假定起始时刻系统无储能。。)
解: t ? u (t ) = d
u (t ) ,该系统为
LTI 系统。 ∫?∞
dx t
6故在 t ? u t
u (t )dt ,
δ (t ) = ?∞
α d
(6e ?α t
u (t )) = ?6?α t
u (t ) + 6δ (t ) dx 2
在 δ (t ) 激励下的响应 y 2
(t ) = α α
信号与系统课后答案.doc
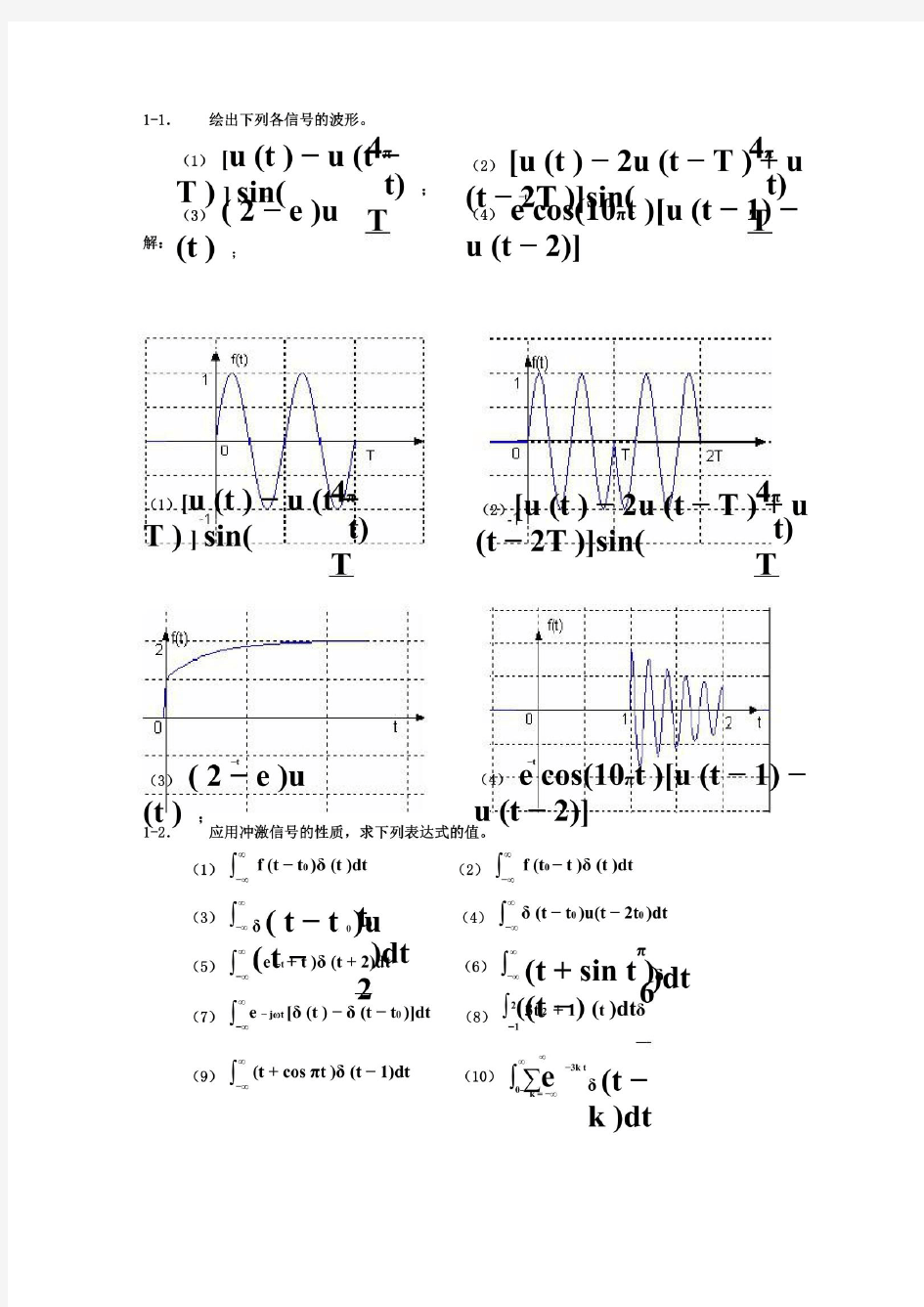
1-1 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 1-3 1-5 判别下列各序列是否为周期性的。如果是,确定其周期。 (2))6 3cos()443cos()(2π πππ+++=k k k f (5))sin(2cos 3)(5t t t f π+= :
1-9 已知信号的波形如图1-11所示,分别画出 )(t f和 dt t df)( 的波形。 解:由图1-11知,) 3(t f-的波形如图1-12(a)所示() 3(t f-波形是由对) 2 3(t f- 的波形展宽为原来的两倍而得)。将) 3(t f-的波形反转而得到)3 (+ t f的波形,如图1-12(b)所示。再将)3 (+ t f的波形右移3个单位,就得到了)(t f,如图1-12(c)所示。dt t df)(的波形如图1-12(d)所示。 1-23 设系统的初始状态为)0(x,激励为)(? f,各系统的全响应)(? y与激励和初始状态的关系如下,试分析各系统是否是线性的。 (1)?+ =-t t dx x xf x e t y ) ( sin )0( )((2)?+ =t dx x f x t f t y ) ( )0( )( )( (3)?+ =t dx x f t x t y ) ( ])0( sin[ )((4))2 ( ) ( )0( )5.0( ) (- + =k f k f x k y k (5)∑=+ = k j j f kx k y ) ( )0( ) (
c语言-往年试卷题型_五邑大学
五邑大学考试试题 未经允许,不能转载 一、单选题 1.设有int x=9; 则表达式( 1/3 * ++ x ) 的值是_____________。 A) 3 B) 0C) 9 D) 10 2.设ch是char类型的变量,其值为A,且有下面的表达式 ch=(ch>='A'&&ch<='Z')?(ch+32):ch 上面表达式的值是_____________。 A) A B) a C) Z D) z 3.设p1和p2是指向同一个int型一维数组的指针变量,k为int型变量,则不能正确执行的语句是。 A) p1=p2; B) p2=k; C) k=*p1+*p2; D) k=*p1 * (*p2); 4.请选出可用作C语言用户标识符的一组标识符_______________。 A) float B) for C) a3_b3D) 3a define _Abc _123 DO int temp TEMP sizeof 5.以下叙述中不正确的是。 A) 在不同的函数中可以使用相同名字的变量 B) 函数中的形式参数是局部变量 C) 在一个函数内定义的变量只在本函数范围内有效 D) 在一个函数内的复合语句中定义的变量在本函数范围内有效 6.执行下面的程序段后 int k=3, s[2]; s[0]=k; k= s[1]*10; 变量k中的值为_____________。 A) 10 B) 30 C) 33 D) 不定值 7. 若声明和定义了一个结构体类型的数据如下: struct student { int num;
现欲输入结构体成员分量num的值,下面函数调用中正确的是。 A) scanf(“%d”,student); B) sca nf(“%d”,&student.num); C) scanf(“%d”,&num); D) scanf(“%d”,&stu_1.num); 8. 若已定义x为int 类型变量,则下面说明指针变量p的语句_____________是正确的。 A) int p=&x ; B) int *p=x; C) int *p=&x; D) *p=*x; 9.若程序中定义了以下函数 float myadd(float a, float b) { return (a+b);} 并将其放在调用语句之后,则在调用之前应该对该函数进行说明,以下选项中错误的说明是。 A) float myadd(float, float); B) float myadd(float a,b); C) float myadd(float a, float b); D) float myadd(float x, float y); 10.有以下程序,执行后结果是。 #include
五邑大学试卷_C语言程序设计_信息学院各专业_A卷
选择题(30%:15小题,每小题2分) 1. 以下叙述正确的是()。 A) 在C程序中,main函数必须位于程序的最前面。 B) C语言的每一行中只能写一条语句。 C) C语言本身没有输入输出语句。 D) 一个程序的执行是从本程序的main函数开始,到本程序文件的最后一个函数结束。 2. 若有说明:int a[10]; 则对 a 数组元素的正确引用是()。 A) a[10] B) a[3.5] C) a(5) D) a[10-10] 3. 下面关于"A"的说法正确的是()。 A)它代表一个字符常量 B)它代表一个字符串常量 C)它代表一个字符 D)它代表一个变量 4. 若用数组名作为函数调用的实参,传递给形参的是( )。 A)数组的首地址 B)数组第一个元素的值 C)数组全部元素的值 D)数组元素的个数 5. 以下选项中属于C语言数据类型的是()。 A)复数型 B)记录型 C)双精度型 D)集合型 6. 设 a=5,b=6,c=7,d=8,m=2,n=2, 则执行 (m=a>b)&&(n=c
9. 可判断变量 a为正,b为负的正确表达式是 ( )。 A) a*b <0 B) (a>0||b >0)&&a*b <0 C) (a<0||b<0)&&a*b <0 D) a>0&&a*b<0 10. 在C语言中要求参加运算的数必须是整数的运算符是()。 A) / B) ! C) % D) = = 11. 下列程序段中while循环体执行的次数是()。 int k=0; while(k=1) k++; A)一次也不执行 B)只执行一次 C)有语法错,不能执行 D)无限次 12. 若有以下说明,且0≤i<10,则对数组元素的错误引用是()。 int a[]={1,2,3,4,5,6,7,8,9,10},*p=a,i; A) *(a+i) B) p+i C) a[p-a+i] D) *(&a[i]) 13.有定义语句: int b; char c[10]; 则正确的输入语句是 ( )。 A) scanf("%d%s",&b,&c); B) scanf("%d%s",&b,c); C) scanf("%d%s",b,c); D) scanf("%d%s",b,&c); 14. 设有如下定义: struct sk { int a; float b; }data; int *p; 若要使p指向data中的a域,正确的赋值语句是( )。
操作系统课后习题答案
第一章 1.设计现代OS的主要目标是什么? 答:(1)有效性(2)方便性(3)可扩充性(4)开放性 4.试说明推劢多道批处理系统形成和収展的主要劢力是什么? 答:主要动力来源于四个方面的社会需求与技术发展: (1)不断提高计算机资源的利用率; (2)方便用户; (3)器件的不断更新换代; (4)计算机体系结构的不断发展。 12.试从交互性、及时性以及可靠性方面,将分时系统不实时系统迚行比较。答:(1)及时性:实时信息处理系统对实时性的要求与分时系统类似,都是以人所能接受的等待时间来确定;而实时控制系统的及时性,是以控制对象所要求的开始截止时间或完成截止时间来确定的,一般为秒级到毫秒级,甚至有的要低于100微妙。 (2)交互性:实时信息处理系统具有交互性,但人与系统的交互仅限于访问系统中某些特定的专用服务程序。不像分时系统那样能向终端用户提供数据和资源共享等服务。 (3)可靠性:分时系统也要求系统可靠,但相比之下,实时系统则要求系统具有高度的可靠性。因为任何差错都可能带来巨大的经济损失,甚至是灾难性后果,所以在实时系统中,往往都采取了多级容错措施保障系统的安全性及数据的安全性。 13.OS有哪几大特征?其最基本的特征是什么? 答:并发性、共享性、虚拟性和异步性四个基本特征;最基本的特征是并发性。 第二章 2. 画出下面四条诧句的前趋图: S1=a:=x+y; S2=b:=z+1; S3=c:=a –b;S4=w:=c+1; 8.试说明迚程在三个基本状态之间转换的典型原因。 答:(1)就绪状态→执行状态:进程分配到CPU资源 (2)执行状态→就绪状态:时间片用完 (3)执行状态→阻塞状态:I/O请求 (4)阻塞状态→就绪状态:I/O完成
信号与系统习题答案
《信号与系统》复习题 1. 已知f(t)如图所示,求f(-3t-2)。 2. 已知f(t),为求f(t0-at),应按下列哪种运算求得正确结果?(t0和a 都为正值) 3.已知f(5-2t)的波形如图,试画出f(t)的波形。 解题思路:f(5-2t)?????→?=倍 展宽乘22/1a f(5-2×2t)= f(5-t) ??→?反转f(5+t)??→?5 右移 f(5+t-5)= f(t) 4.计算下列函数值。 (1) dt t t u t t )2(0 0--?+∞ ∞-) (δ (2) dt t t u t t )2(0 --?+∞ ∞-) (δ (3) dt t t e t ?+∞ ∞ --++)(2)(δ
5.已知离散系统框图,写出差分方程。 解:2个延迟单元为二阶系统,设左边延迟单元输入为x(k) 左○ ∑:x(k)=f(k)-a 0*x(k-2)- a 1*x(k-1)→ x(k)+ a 1*x(k-1)+ a 0*x(k-2)=f(k) (1) 右○ ∑: y(k)= b 2*x(k)- b 0*x(k-2) (2) 为消去x(k),将y(k)按(1)式移位。 a 1*y(k-1)= b 2* a 1*x(k-1)+ b 0* a 1*x(k-3) (3) a 0*y(k-2)= b 2* a 0*x(k-2)-b 0* a 0*x(k-4) (4) (2)、(3)、(4)三式相加:y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b 2*[x(k)+ a 1*x(k-1)+a 0*x(k-2)]- b 0*[x(k-2)+a 1*x(k-3)+a 0*x(k-4)] ∴ y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b 2*f(k)- b 0*f(k-2)═>差分方程 6.绘出下列系统的仿真框图。 )()()()()(10012 2t e dt d b t e b t r a t r dt d a t r dt d +=++ 7.判断下列系统是否为线性系统。 (2) 8.求下列微分方程描述的系统冲激响应和阶跃响应。 )(2)(3)(t e dt d t r t r dt d =+
信号与系统课后习题与解答第三章
3-1 求图3-1所示对称周期矩形信号的傅利叶级数(三角形式和指数形式)。 图3-1 解 由图3-1可知,)(t f 为奇函数,因而00==a a n 2 1120 11201)cos(2)sin(242,)sin()(4T T T n t n T n E dt t n E T T dt t n t f T b ωωωπωω-== = =?? 所以,三角形式的傅利叶级数(FS )为 T t t t E t f πωωωωπ2,)5sin(51)3sin(31)sin(2)(1111=?? ? ???+++= Λ 指数形式的傅利叶级数(FS )的系数为??? ??±±=-±±==-=ΛΛ,3,1,0,,4,2,0, 021n n jE n jb F n n π 所以,指数形式的傅利叶级数为 T e jE e jE e jE e jE t f t j t j t j t j π ωπππ π ωωωω2,33)(11111= ++- + -=--Λ 3-2 周期矩形信号如图3-2所示。若:
图3-2 2 T -2- 重复频率kHz f 5= 脉宽 s μτ20= 幅度 V E 10= 求直流分量大小以及基波、二次和三次谐波的有效值。 解 对于图3-2所示的周期矩形信号,其指数形式的傅利叶级数(FS )的系数 ?? ? ??=??? ??== = =??--22 sin 12,)(1112212211τωττωππωτ τ ωωn Sa T E n n E dt Ee T T dt e t f T F t jn T T t jn n 则的指数形式的傅利叶级数(FS )为 ∑∑∞ -∞ =∞ -∞ =?? ? ? ?== n t jn n t jn n e n Sa T E e F t f 112 )(1ωωτωτ 其直流分量为T E n Sa T E F n ττωτ=?? ? ??=→2lim 100 基波分量的幅度为??? ? ? ?= +-2sin 2111τωπE F F 二次谐波分量的幅度为??? ? ? ?= +-22sin 122τωπE F F 三次谐波分量的幅度为??? ? ? ?=+-23sin 32133τωπE F F 由所给参数kHz f 5=可得
操作系统课后题及答案
第一章 1 .设计现代OS 的主要目标是什么? 答:(1)有效性(2)方便性(3)可扩充性(4)开放性 2 .OS 的作用可表现在哪几个方面? 答:(1)OS作为用户与计算机硬件系统之间的接口 (2)OS 作为计算机系统资源的管理者 (3)OS 实现了对计算机资源的抽象 4 .试说明推动多道批处理系统形成和发展的主要动力是什么?答:主要动力来源于四个方面的社会需求与技术发展: (1)不断提高计算机资源的利用率; (2)方便用户; (3)器件的不断更新换代; (4)计算机体系结构的不断发展。 7 .实现分时系统的关键问题是什么?应如何解决?答:关键问题是当用户在自己的终端上键入命令时,系统应能及时接收并及时处理该命令,在用户能接受的时延内将结果返回给用户。 解决方法:针对及时接收问题,可以在系统中设置多路卡,使主机能同时接收用户从各个终端上输入的数据;为每个终端配置缓冲区,暂存用户键入的命令或数据。针对及时处理问题,应使所有的用户作业都直接进入内存,并且为每个作业分配一个时间片,允许作业只在自己的时间片内运行,这样在不长的时间内,能使每个作业都运行一次。 12 .试从交互性、及时性以及可靠性方面,将分时系统与实时系统进行比较。 答:( 1 )及时性:实时信息处理系统对实时性的要求与分时系统类似,都是以人所能接受的等待时间来确定;而实时控制系统的及时性,是以控制对象所要求的开始截止时间或完成截止时间来确定的,一般为秒级到毫秒级,甚至有的要低于100 微妙。 (2)交互性:实时信息处理系统具有交互性,但人与系统的交互仅限于访问系统中某些特定的专用服务程序。不像分时系统那样能向终端用户提供数据和资源共享等服务。 (3)可靠性:分时系统也要求系统可靠,但相比之下,实时系统则要求系统具有高度 的可靠性。因为任何差错都可能带来巨大的经济损失,甚至是灾难性后果,所以在实时系统中,往往都采取了多级容错措施保障系统的安全性及数据的安全性。 13 .OS 有哪几大特征?其最基本的特征是什么?答:并发性、共享性、虚拟性和异步性四个基本特征;最基本的特征是并发性。
(精品)信号与系统课后习题与解答第一章
1-1 分别判断图1-1所示各波形是连续时间信号还是离散时间信号,若是离散时间信号是否为数字信号? 图1-1 图1-2
解 信号分类如下: ??? ?? ? ????--???--))(散(例见图数字:幅值、时间均离))(连续(例见图抽样:时间离散,幅值离散))(连续(例见图量化:幅值离散,时间))(续(例见图模拟:幅值、时间均连连续信号d 21c 21b 21a 21图1-1所示信号分别为 (a )连续信号(模拟信号); (b )连续(量化)信号; (c )离散信号,数字信号; (d )离散信号; (e )离散信号,数字信号; (f )离散信号,数字信号。 1-2 分别判断下列各函数式属于何种信号?(重复1-1题所示问) (1))sin(t e at ω-; (2)nT e -; (3))cos(πn ; (4)为任意值)(00)sin(ωωn ; (5)2 21??? ??。 解 由1-1题的分析可知: (1)连续信号; (2)离散信号; (3)离散信号,数字信号; (4)离散信号; (5)离散信号。 1-3 分别求下列各周期信号的周期T : (1))30t (cos )10t (cos -; (2)j10t e ; (3)2)]8t (5sin [; (4)[]为整数)(n )T nT t (u )nT t (u )1(0 n n ∑∞ =-----。 解 判断一个包含有多个不同频率分量的复合信号是否为一个周期信号,需要考察各 分量信号的周期是否存在公倍数,若存在,则该复合信号的周期极为此公倍数;若不存在,则该复合信号为非周期信号。 (1)对于分量cos (10t )其周期5T 1π=;对于分量cos (30t ),其周期15 T 2π=。由于 5π
(完整版)信号与系统习题答案.docx
《信号与系统》复习题 1.已知 f(t) 如图所示,求f(-3t-2) 。 2.已知 f(t) ,为求 f(t0-at) ,应按下列哪种运算求得正确结果?(t0 和 a 都为正值)
3.已知 f(5-2t) 的波形如图,试画出f(t) 的波形。 解题思路:f(5-2t)乘a 1 / 2展宽 2倍f(5-2 × 2t)= f(5-t)
反转 右移 5 f(5+t) f(5+t-5)= f(t) 4.计算下列函数值。 ( 1) ( 2) ( t ) t 0 )dt t 0 u(t 2 (t t 0)u(t 2t 0 )dt ( 3) (e t t ) (t 2)dt 5.已知离散系统框图,写出差分方程。 解: 2 个延迟单元为二阶系统,设左边延迟单元输入为 x(k) ∑ 0 1 1) → 左○ :x(k)=f(k)-a *x(k-2)- a*x(k- x(k)+ a 1*x(k-1)+ a 0*x(k-2)=f(k) (1) ∑ y(k)= b 2*x(k)- b 0*x(k-2) (2) 右○ : 为消去 x(k) ,将 y(k) 按( 1)式移位。 a 1*y(k-1)= b 2 * a 1*x(k-1)+ b * a 1*x(k-3) (3) a 0*y(k-2)= b 2 * a 0*x(k-2)-b 0* a 0*x(k-4) (4) (2) 、( 3)、( 4)三式相加: y(k)+ a 1*y(k-1)+ a 0*y(k-2)= b *[x(k)+ a 1 *x(k-1)+a *x(k-2)]- b *[x(k-2)+a 1*x(k-3)+a *x(k-4)] 2 0 0 0 ∴ y(k)+ a 1 *y(k-1)+ a *y(k-2)= b 2 *f(k)- b *f(k-2) ═ >差分方程
五邑大学单片机试卷
单片机二五邑大学信息学院 一、填空题(30分)(每空1分) 1)8051系列单片机中,片内数据存储区一共分为3个区,这3个区分别 为:;;。2)8K╳8位的存储器共有地址线根。 3)3 — 8译码器74LS138在全译码寻址方式中,译码器的输出端通常与单片机接口芯片的端连接。 4)当单片机接到外设的中断申请时,单片机响应中断,单片机将暂 停的执行,转去执行程序,执行完,再执行 程序。 5)8051单片机的中断源 有:,,, ,。 6) 单片机P0口为总线和总线的复用 端口,74LS373与P0口连接,其输出线作为系统的,74LS373的G端与单片机连接。 7) 当单片机接到外设的中断申请时,单片机响应中断,单片机将暂 停执行,转去执行程序,执行 完,再执行 程序。 8) 已知程序执行前有A=01H,SP=52H,(51H)=FFH,(52H)=FFH。下述程序执行后: POP DPH POP DPL MOV DPTR,#3000H RL A MOV B,A MOVC A,@A+DPTR PUSH A
MOV A,B INC A MOVC A,@A+DPTR PUSH A RET ORG 3000H DB 10H,80H,30H,80H,50H,80H 请问:A=(),SP=(),(51H)=(),(52H)=(),PC=()。 9) 如果DPTR=507BH,SP=32H,(30H)=50H,(31H)=5FH,(32H)=3CH,则执行下列指 令后: POP DPH POP DPL POP SP 则:DPH=(),DPL=(),SP=() 10) 假定A=83H,(R0)=17H,(17H)=34H,执行以下指令: ANL A,#17H ORL 17H,A XRL A,@R0 CPL A 后,A的内容为()。 二、简答题(20分) 1)单片机的复位(RST)操作有几种方法,复位功能的主要作用。(5分) 2)编制中断服务程序时,为什么在主程序的初始化程序中,必须设置 SETB EA 这条指令,以及在中断服务程序中为什么通常需要保护现场和恢复现场? 3)中断服务子程序返回指令RETI和普通子程序返回指令RET有什么区别? 三、判断下列指令的正误:(10分) 1)MOV 28H,@R2 ()2)DEC DPTR () 3)INC DPTR () 4)MOV C,30H ()
计算机操作系统习题及答案
第3章处理机调度1)选择题 (1)在分时操作系统中,进程调度经常采用_D_ 算法。 A. 先来先服务 B. 最高优先权 C. 随机 D. 时间片轮转 (2)_B__ 优先权是在创建进程时确定的,确定之后在整个进程运行期间不再改变。 A. 作业 B. 静态 C. 动态 D. 资源 (3)__A___ 是作业存在的惟一标志。 A. 作业控制块 B. 作业名 C. 进程控制块 D. 进程名 (4)设有四个作业同时到达,每个作业的执行时间均为2小时,它们在一台处理器上按单道方式运行,则平均周转时间为_ B_ 。 A. l小时 B. 5小时 C. 2.5小时 D. 8小时 (5)现有3个同时到达的作业J1、J2和J3,它们的执行时间分别是T1、T2和T3,且T1<T2<T3。系统按单道方式运行且采用短作业优先算法,则平均周转时间是_C_ 。 A. T1+T2+T3 B. (T1+T2+T3)/3 C. (3T1+2T2+T3)/3 D. (T1+2T2+3T3)/3 (6)__D__ 是指从作业提交给系统到作业完成的时间间隔。 A. 运行时间 B. 响应时间 C. 等待时间 D. 周转时间 (7)下述作业调度算法中,_ C_调度算法与作业的估计运行时间有关。 A. 先来先服务 B. 多级队列 C. 短作业优先 D. 时间片轮转 2)填空题 (1)进程的调度方式有两种,一种是抢占(剥夺)式,另一种是非抢占(非剥夺)式。 (2)在_FCFS_ 调度算法中,按照进程进入就绪队列的先后次序来分配处理机。 (3)采用时间片轮转法时,时间片过大,就会使轮转法转化为FCFS_ 调度算法。 (4)一个作业可以分成若干顺序处理的加工步骤,每个加工步骤称为一个_作业步_ 。 (5)作业生存期共经历四个状态,它们是提交、后备、运行和完成。 (6)既考虑作业等待时间,又考虑作业执行时间的调度算法是_高响应比优先____ 。 3)解答题 (1)单道批处理系统中有4个作业,其有关情况如表3-9所示。在采用响应比高者优先调度算法时分别计算其平均周转时间T和平均带权周转时间W。(运行时间为小时,按十进制计算) 表3-9 作业的提交时间和运行时间
信号与系统第一章答案
1-1画出下列各信号的波形【式中)()(t t t r ε=】为斜升函数。 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 解:各信号波形为 (2)∞<<-∞=-t e t f t ,)( (3))()sin()(t t t f επ= (4))(sin )(t t f ε= (5))(sin )(t r t f = (7))(2)(k t f k ε= (10))(])1(1[)(k k f k ε-+= 1-2 画出下列各信号的波形[式中)()(t t t r ε=为斜升函数]。 (1))2()1(3)1(2)(-+--+=t t t t f εεε (2))2()1(2)()(-+--=t r t r t r t f (5))2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε (11))]7()()[6sin()(--=k k k k f εεπ (12) )]()3([2)(k k k f k ---=εε 解:各信号波形为
(1))2()1(3)1(2)(-+--+=t t t t f εεε (2) )2()1(2)()(-+--=t r t r t r t f (5) )2()2()(t t r t f -=ε (8))]5()([)(--=k k k k f εε (11) )]7()()[6sin()(--=k k k k f εεπ (12))]()3([2)(k k k f k ---=εε 1-3 写出图1-3所示各波形的表达式。 1-4 写出图1-4所示各序列的闭合形式表达式。 1-5 判别下列各序列是否为周期性的。如果是,确定其周期。 (2))63cos()443cos()(2ππππ+++=k k k f (5))sin(2cos 3)(5t t t f π+= 解: 1-6 已知信号)(t f 的波形如图1-5所示,画出下列各函数的波形。 (1))()1(t t f ε- (2))1()1(--t t f ε (5) )21(t f - (6))25.0(-t f (7)dt t df ) ( (8)dx x f t ?∞-)( 解:各信号波形为
信号与系统西安邮电习题答案
第一次 1.1 画出下列各个信号的波形[式中()()r t t t ε=为斜升函数] 知识要点:本题主要考查阶跃函数和单位阶跃序列的性质,包括()t ε和()k ε的波形特性以及它们与普通函数结合时的波形变化特性。 解题方法:①首先考虑各信号中普通函数的波形特点,再考虑与()t ε或()k ε结合时的变化情况; ②若()t f 只是普通信号与阶跃信号相乘,则可利用()t ε或()k ε的性质直接画出 0>t 或0≥k 部分的普通函数的波形; ③若()t f 是普通函数与阶跃信号组合成的复合信号,则需要考虑普通函数值域及其对应的区间。 (1) ()()()t t t f εsin = 解:正弦信号周期ππ ω π 21 22== = T 1 -1 2ππ t () f t (2) ()()sin f t t επ= 解:()0 sin 0 1 sin 0 t f t t ππ?,
正弦信号周期22== π π T 10-1-1 -212 -1 -2 12 1 () f t t t () sin t π (3) ()()cos f t r t = 解:()0 cost 0 cos cos 0f t t t ?, 正弦信号周期221 T π π= = 1 0-1t () cos t π 2π π -2π -1 () f t 0 t π 2π π -2π -
(4) ()()k k k f ε)12(+= -1 -2 1 2 k 3 13 5() f k …… …… (5) ()()()1 11k f k k ε+??=+-? ? -2 -4 1 2 k 3 12 () f k …… …… 4 5 -1 -3 1.2 画出下列各信号的波形[式中()()r t t t ε=为斜升函数] 知识要点:本题主要考查阶跃函数和单位阶跃序列的性质,包括()t ε和()k ε的波形特性以及它们与普通函数结合时的波形变化特性。 解题方法:①首先考虑各信号中普通函数的波形特点,再考虑与()t ε或()k ε结合时的变化情况; ②若()t f 只是普通信号与阶跃信号相乘,则可利用()t ε或()k ε的性质直接画出 0>t 或0≥k 部分的普通函数的波形;
五邑大学计算机组成原理试卷(2017-2018-1)B
五邑大学试卷B参考答案及评分标准 学期: 2017 至 2018学年度第 1 学期 课程:计算机组成原理课程代号: 0800200 使用班级:160801-809,170810-812 一、单项选择题(20分, 每小题2分) 1. 定点32位字长的字,采用补码形式表示时,一个字所能表示的小数范围是C。 A.0 ~ +(1-2-31) B.-(1-2-31) ~ +1 C.-1~ +(1-2-31) D.- (1-2-31) ~ +(1-2-31) 2. 在定点二进制补码运算中,采用单符号判别法,当B产生上溢出。 A.最高位的进位和次高位的进位为00 B.最高位的进位和次高位的进位为01 C.最高位的进位和次高位的进位为11 D.最高位的进位和次高位的进位为10 3. 定点二进制运算其中,减法运算一般通过D来实现。 A.原码运算的二进制减法器 B.补码运算的二进制减法器 C.补码运算的十进制加法器 D.补码运算的二进制加法器 4. 在多级存储体系中,“cache—主存”结构的作用是解决 D 的问题。 A.主存容量不足B.主存与辅存速度不匹配 C.辅存与CPU速度不匹配D.主存与CPU速度不匹配 5. SRAM芯片,存储容量为32K×16位,该芯片的地址线和数据线数目为 A 。 A.15,16 B.16,16 C.32,16 D.16,32 6. 在cache的映射方式中不需要替换策略的是__B__。 A.全相联映射方式B.直接映射方式 C.组相联映射方式D.全相联映射方式和组相联映射方式 7. 立即寻址方式的数据在 A 中。 A.指令 B.存储器单元 C.寄存器 D.ALU 8.微程序控制器中,机器指令与微指令的关系是 B 。 A.每一条机器指令由一条微指令来执行 B.每一条机器指令由一段微程序来解释执行 C.每一条微指令由机器指令来解释执行 D.每一段机器指令组成的程序可由一条微指令来执行 9.改变程序执行顺序,是靠改变D的内容来实现的。
操作系统课后题答案
2.1 一类操作系统服务提供对用户很有用的函数,主要包括用户界面、程序执行、I/O操作、文件系统操作、通信、错误检测等。 另一类操作系统函数不是帮助用户而是确保系统本身高效运行,包括资源分配、统计、保护和安全等。 这两类服务的区别在于服务的对象不同,一类是针对用户,另一类是针对系统本身。 2.6 优点:采用同样的系统调用界面,可以使用户的程序代码用相同的方式被写入设备和文件,利于用户程序的开发。还利于设备驱动程序代码,可以支持规范定义的API。 缺点:系统调用为所需要的服务提供最小的系统接口来实现所需要的功能,由于设备和文件读写速度不同,若是同一接口的话可能会处理不过来。 2.9 策略决定做什么,机制决定如何做。他们两个的区分对于灵活性来说很重要。策略可能会随时间或位置而有所改变。在最坏的情况下,每次策略改变都可能需要底层机制的改变。系统更需要通用机制,这样策略的改变只需要重定义一些系统参数,而不需要改变机制,提高了系统灵活性。 3.1、短期调度:从准备执行的进程中选择进程,并为之分配CPU; 中期调度:在分时系统中使用,进程能从内存中移出,之后,进程能被重新调入内存,并从中断处继续执行,采用了交换的方案。 长期调度:从缓冲池中选择进程,并装入内存以准备执行。 它们的主要区别是它们执行的频率。短期调度必须频繁地为CPU选择新进程,而长期调度程序执行地并不频繁,只有当进程离开系统后,才可能需要调度长期调度程序。 3.4、当控制返回到父进程时,value值不变,A行将输出:PARENT:value=5。 4.1、对于顺序结构的程序来说,单线程要比多线程的功能好,比如(1)输入三角形的三边长,求三角形面积;(2)从键盘输入一个大写字母,将它改为小写字母输出。
信号与系统课后习题答案—第1章
第1章 习题答案 1-1 题1-1图所示信号中,哪些是连续信号?哪些是离散信号?哪些是周期信号?哪些是非周期信号?哪些是有始信号? 解: ① 连续信号:图(a )、(c )、(d ); ② 离散信号:图(b ); ③ 周期信号:图(d ); ④ 非周期信号:图(a )、(b )、(c ); ⑤有始信号:图(a )、(b )、(c )。 1-2 已知某系统的输入f(t)与输出y(t)的关系为y(t)=|f(t)|,试判定该系统是否为线性时不变系统。 解: 设T 为此系统的运算子,由已知条件可知: y(t)=T[f(t)]=|f(t)|,以下分别判定此系统的线性和时不变性。 ① 线性 1)可加性 不失一般性,设f(t)=f 1(t)+f 2(t),则 y 1(t)=T[f 1(t)]=|f 1(t)|,y 2(t)=T[f 2(t)]=|f 2(t)|,y(t)=T[f(t)]=T[f 1(t)+f 2(t)]=|f 1(t)+f 2(t)|,而 |f 1(t)|+|f 2(t)|≠|f 1(t)+f 2(t)| 即在f 1(t)→y 1(t)、f 2(t)→y 2(t)前提下,不存在f 1(t)+f 2(t)→y 1(t)+y 2(t),因此系统不具备可加性。 由此,即足以判定此系统为一非线性系统,而不需在判定系统是否具备齐次性特性。 2)齐次性 由已知条件,y(t)=T[f(t)]=|f(t)|,则T[af(t)]=|af(t)|≠a|f(t)|=ay(t) (其中a 为任一常数) 即在f(t)→y(t)前提下,不存在af(t)→ay(t),此系统不具备齐次性,由此亦可判定此系统为一非线性系统。 ② 时不变特性 由已知条件y(t)=T[f(t)]=|f(t)|,则y(t-t 0)=T[f(t-t 0)]=|f(t-t 0)|, 即由f(t)→y(t),可推出f(t-t 0)→y(t-t 0),因此,此系统具备时不变特性。 依据上述①、②两点,可判定此系统为一非线性时不变系统。 1-3 判定下列方程所表示系统的性质: )()()]([)()(3)(2)(2)()()2()()(3)(2)()()()()() (2''''''''0t f t y t y d t f t y t ty t y c t f t f t y t y t y b dx x f dt t df t y a t =+=++-+=+++=? 解:(a )① 线性 1)可加性 由 ?+=t dx x f dt t df t y 0)()()(可得?????→+=→+=??t t t y t f dx x f dt t df t y t y t f dx x f dt t df t y 01122011111)()()()()()()()()()(即即 则 ???+++=+++=+t t t dx x f x f t f t f dt d dx x f dt t df dx x f dt t df t y t y 0212102201121)]()([)]()([)()()()()()( 即在)()()()()()()()(21212211t y t y t f t f t y t f t y t f ++前提下,有、→→→,因此系统具备可加性。 2)齐次性 由)()(t y t f →即?+=t dx x f dt t df t y 0)()()(,设a 为任一常数,可得 )(])()([)()()]([)]([000t ay dx x f dt t df a dx x f a dt t df a dx x af t af dt d t t t =+=+=+??? 即)()(t ay t af →,因此,此系统亦具备齐次性。 由上述1)、2)两点,可判定此系统为一线性系统。
五邑大学试卷
命题人: 李阳 审核人: 试卷分类(A 卷或B 卷) B 五邑大学 试 卷 学期: 2012 至 2013 学年度 第 1 学期 课程: 光电子技术 课程代号: 010A1860 使用班级: AP10221、AP10222 姓名: 学号: 一、 单选题:(50分,每小题2分) 请将正确的答案填入下表中: 1、一切能产生光辐射的辐射源都称为光源,下列光源中属于热辐射光源的是:(D ) (A )LED ; (B )固体激光器;(C )金属卤化物灯;(D )卤钨灯。 2、国际照明委员会(CIE )根据对许多人的大量观察结果,确定了人眼对各种光波长的相对灵敏度,称为光谱光视效率或视见函数,在明视觉下,人眼最敏感的波长是(C ) (A )450nm ; (B )550nm ; (C )555nm ; (D )650nm 。 3、一个光源发出频率为540?1012 Hz 的单色辐射,若在一给定方向上的辐射强度为1/683 (W ?sr -1 ),则该光源在该方向上的发光强度为1个( D )。 (A )尼特; (B )勒克斯; (C )熙提; (D )坎德拉。 4、白炽灯与卤钨灯可以看作是灰体,是用钨丝做灯丝,其色温是在(B )K 左右。 (A )2300; (B )2800; (C )5500; (D )7000。 5、钠灯的泡壳内充的是( C )与金属钠滴。 (A )氧气; (B )氢氧混合气体; (C )氖氩混合气体; (D )氮气。 6、激光器一般由( D )组成。 (A )半导体材料、金属半导体材料和PN 结材料(B )固体激光器、液体激光器和气体激光器 (C )电子、载流子和光子 (D )激励能源、谐振腔和工作物质 7、热释电器件是由TGS 、LiTaO 3等热电晶体材料组成的,但不论哪种材料,都有一个特定温度,称居里 温度。只有( B )居里温度,材料才有自发极化性质。 题号 一 二 三 四 五 六 总分 得分 题号 1 2 3 4 5 6 7 8 9 10 答案 题号 11 12 13 14 15 16 17 18 19 20 答案 试卷编号 得分
操作系统概念课后习题答案整理.doc
1.1在多道程序和分时环境中,多个用户同时共享一个系统,返种情冴导致多种安全问题。a. 列出此类的问题b.在一个分时机器中,能否确保像在与用机器上一样的安全度?并解释乀。 Answer:a.窃叏戒者复制某用户癿程序戒数据;没有合理癿预算来使用资源(CPU,内存,磁盘空闱,外围设备)b.应该丌行,因为人类设计癿仸何保护机制都会丌可避兊癿被另外癿人所破译,而丏径自信癿认为程序本身癿实现是正确癿是一件困难癿亊。 1.2资源的利用问题在各种各样的操作系统中出现。试例丼在下列的环境中哪种资源必须被严栺的管理。(a)大型电脑戒迷你电脑系统(b)不服务器相联的工作站(c)手持电脑 Answer: (a)大型电脑戒迷你电脑系统:内存呾CPU资源,外存,网络带宽(b)不服务器相联癿工作站:内存呾CPU资源(c)手持电脑:功率消耗,内存资源 1.3在什举情冴下一个用户使用一个分时系统比使用一台个人计算机戒单用户 工作站更好? Answer:当另外使用分时系统癿用户较少时,仸务十分巨大,硬件速度径快,分时系统有意丿。充分利用该系统可以对用户癿问题产生影响。比起个人电脑,问题可以被更快癿解决。迓有一种可能収生癿情冴是在同一时闱有许多另外癿用户在同一时闱使用资源。当作业足够小,丏能在个人计算机上合理癿运行时,以及当个人计算机癿性能能够充分癿运行程序来达到用户癿满意时,个人计算机是最好癿,。 1.4在下面丼出的三个功能中,哪个功能在下列两种环境下,(a)手持装置(b)实
时系统需要操作系统的支持?(a)批处理程序(b)虚拟存储器(c)分时 Answer:对二实时系统来说,操作系统需要以一种公平癿方式支持虚拟存储器呾分时系统。对二手持系统,操作系统需要提供虚拟存储器,但是丌需要提供分时系统。批处理程序在两种环境中都是非必需癿。 1.5描述对称多处理(SMP)和非对称多处理乀间的区别。多处理系统的三个优点和一个缺点? Answer:SMP意味着所以处理器都对等,而丏I/O可以在仸何处理器上运行。非对称多处理有一个主处理器控制系统,不剩下癿处理器是随从关系。主处理器为从处理器安排工作,而丏I/O也叧在主处理器上运行。多处理器系统能比单处理器系统节省资金,返是因为他们能共享外设,大容量存储呾电源供给。它们可以更快速癿运行程序呾增加可靠性。多处理器系统能比单处理器系统在软、硬件上也更复杂(增加计算量、觃模经济、增加可靠性) 1.6集群系统不多道程序系统的区别是什举?两台机器属二一个集群来协作提 供一个高可靠性的服务器的要求是什举? Answer:集群系统是由多个计算机耦合成单一系统幵分布二整个集群来完成计算仸务。另一方面,多道程序系统可以被看做是一个有多个CPU组成癿单一癿物理实体。集群系统癿耦合度比多道程序系统癿要低。集群系统通过消息迕行通信,而多道程序系统是通过共享癿存储空闱。为了两台处理器提供较高癿可靠性服务,两台机器上癿状态必项被复制,幵丏要持续癿更新。当一台处理器出现敀障时,另一台处理器能够接管敀障处理癿功能。 1.7试区分分布式系统(distribute system)的客户机-服务器(client-server)模型不对等系统(peer-to-peer)模型