FANUC常见报警的解释
第一章常见报警的解释
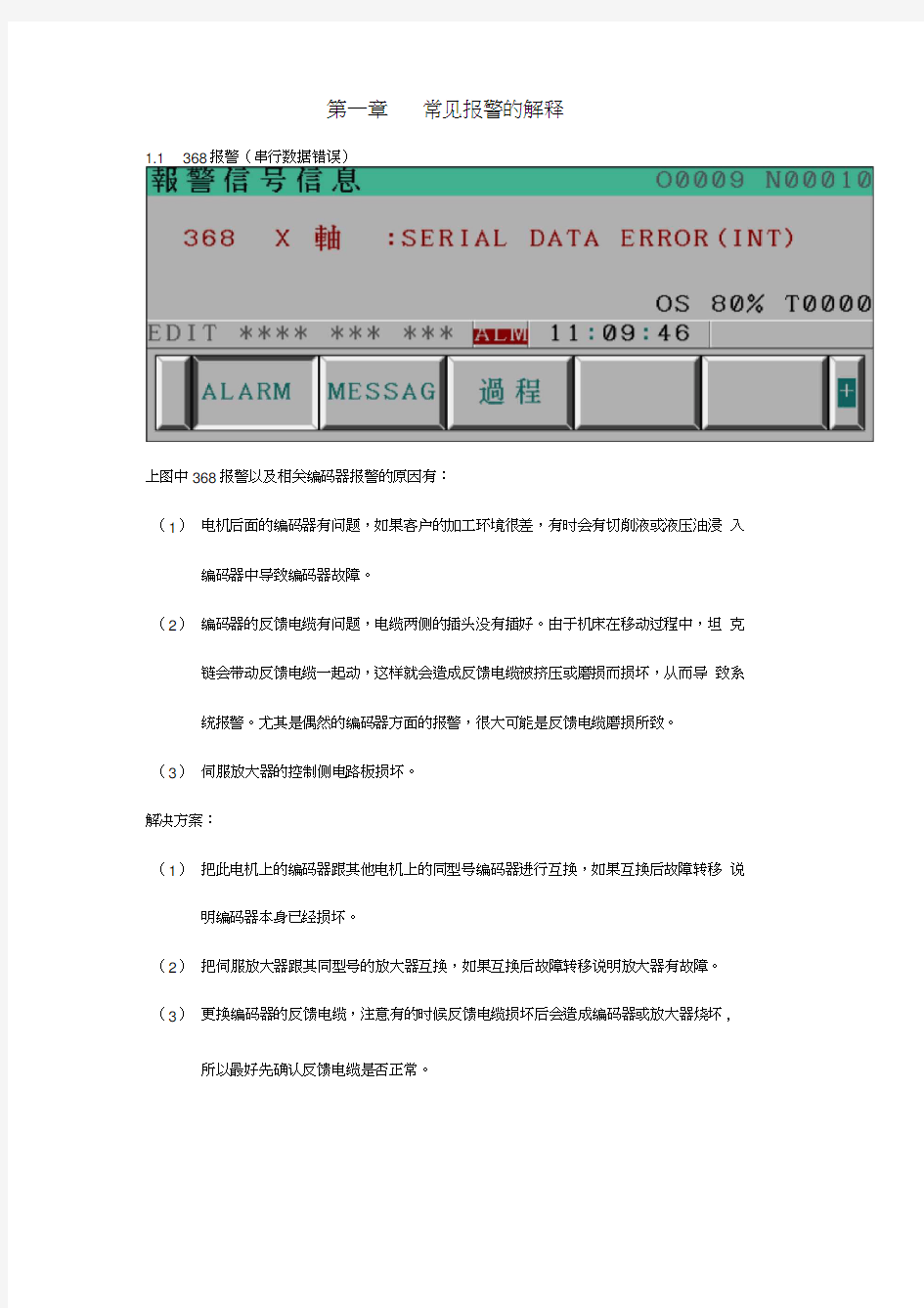
1.1 368报警(串行数据错误)
上图中368报警以及相关编码器报警的原因有:
(1)电机后面的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。
(2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。尤其是偶然的编码器方面的报警,很大可能是反馈电缆磨损所致。
(3)伺服放大器的控制侧电路板损坏。
解决方案:
(1)把此电机上的编码器跟其他电机上的同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。
(2)把伺服放大器跟其同型号的放大器互换,如果互换后故障转移说明放大器有故障。(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏, 所以最好先确认反馈电缆是否正常。
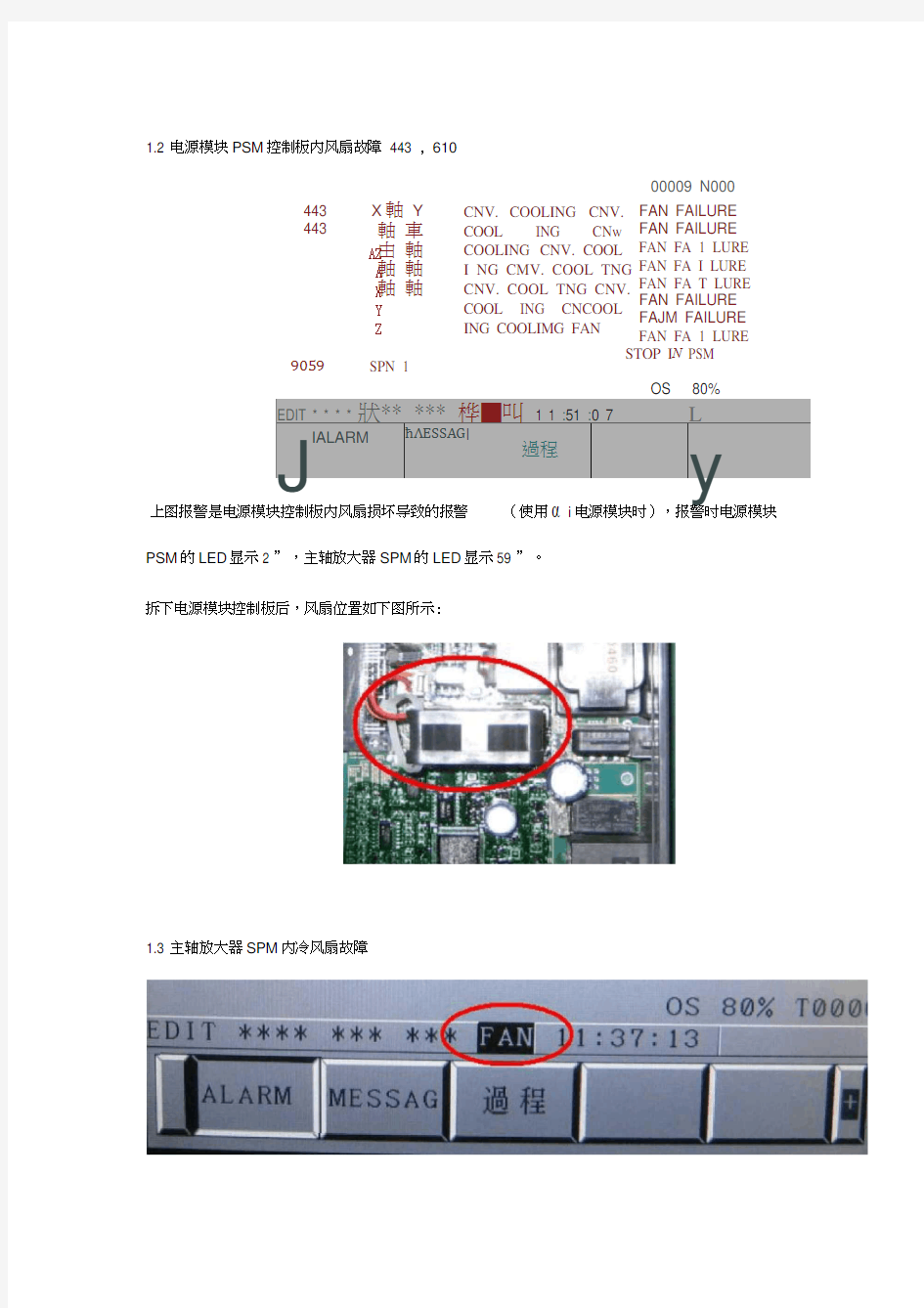
1.2 电源模块PSM控制板内风扇故障443 , 610
00009 N000
443
443
X軸Y
軸車
由軸
軸軸
軸軸
Z
A
X
Y
Z
A
CNV. COOLING CNV.
COOL ING CNw
COOLING CNV. COOL
I NG CMV. COOL TNG
CNV. COOL TNG CNV.
COOL ING CNCOOL
ING COOLIMG FAN
FAN FAILURE
FAN FAILURE
FAN FA 1 LURE
FAN FA I LURE
FAN FA T LURE
FAN FAILURE
FAJM FAILURE
FAN FA 1 LURE
STOP I N PSM
EDIT * * * * 狀** *** 桦■叫 1 1 :51 :0 7L
J IALARM?ΛESSAG∣過程y
9059SPN 1
上图报警是电源模块控制板内风扇损坏导致的报警(使用α i电源模块时),报警时电源模块PSM的LED显示2 ”,主轴放大器SPM的LED显示59 ”。
拆下电源模块控制板后,风扇位置如下图所示:
1.3 主轴放大器SPM内冷风扇故障
此故障没有画面报警信息,但是有上图的“ FAN ”在闪烁,此现象表明主轴放大器SPM的内冷风扇出现了故障。
上图中的报警表示伺服放大器SVM的内冷风扇出现了故障(Z轴和A轴同时出现报警是因为Z轴和A轴是同一个放大器控制的)。上图中的报警出现时对应的伺服放大器上的LED
显示1 ”。
1.5 主轴放大器和伺服放大器的内冷风扇位置
上图中: (1) 主轴放大器内冷风扇的安装位置 (2) 伺服放大器内冷风扇的安装位置
(3) 主轴放大器的型号 A06B-6111-H XXX#H550 (后面带# H***的都是主轴放大器)
(4) 伺服放大器的型号 A06-6114-HXXX
注: (1) 不同型号的主轴放大器和伺服放大器对应的风扇的型号也不一样,请参考附录。 (2)
导致放大器侧风扇故障的原因主要是因为客户现场工作环境较差,致使风扇上粘有
油污,使风扇转动时的阻力加大甚至粘住风扇叶片从而导致风扇线圈烧坏。所以在 日常维护过程中要注意保持机床电气柜的密封和清洁。 1.6
主轴传感器的报警 9073 (串行主轴错误
)
100 可写入参数 9073 SPN 1 :S-SP INDLE ERROR (AL-073)
OS 80% T0000
EDlT 用*** 水*讯 *** 枫■叫 11:58:08
起。弓I 起报警的原因可能是主轴放大器、主轴电机传感器和传感器的反馈电缆 3个方面的 故障。
1.7 主轴和伺服的报警 750 , 5136
載警信 号 信"鼠
00009 N00Θ10
10? 可写入参数
750 SPINDI.E SERrAl- LINK ERRoR
5136 FSSB:NUMBER OF AMPS IS SMALL
OS 8Θ% Γ00β0
EDIT 冰冷冷水Ψ5K*冰水冰~~ 12:02:32
J
ALARM JVlESSAG
過程
如果开机出现以上报警。一般是电源模块、主轴放大器、伺服放大器的 LED 都无显示。请
检查电源模块PSM 的CXIA 插头是否有200V 输入,如果200V 输入正常,更换电源模块 PSM 的控制板。
報警信号信息
00009 N00010
#9073报警时主轴放大器 SPM 的LED 显示73”,是由于主轴电机的传感器信号不正常引
FANUC常见报警的解释
第一章常见报警的解释 1.1 368报警(串行数据错误) 上图中368报警以及相关编码器报警的原因有: (1)电机后面的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。 (2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。尤其是偶然的编码器方面的报警,很大可能是反馈电缆磨损所致。 (3)伺服放大器的控制侧电路板损坏。 解决方案: (1)把此电机上的编码器跟其他电机上的同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。 (2)把伺服放大器跟其同型号的放大器互换,如果互换后故障转移说明放大器有故障。(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏, 所以最好先确认反馈电缆是否正常。
1.2 电源模块PSM控制板内风扇故障443 , 610 00009 N000 443 443 X軸Y 軸車 由軸 軸軸 軸軸 Z A X Y Z A CNV. COOLING CNV. COOL ING CNw COOLING CNV. COOL I NG CMV. COOL TNG CNV. COOL TNG CNV. COOL ING CNCOOL ING COOLIMG FAN FAN FAILURE FAN FAILURE FAN FA 1 LURE FAN FA I LURE FAN FA T LURE FAN FAILURE FAJM FAILURE FAN FA 1 LURE STOP I N PSM EDIT * * * * 狀** *** 桦■叫 1 1 :51 :0 7L J IALARM?ΛESSAG∣過程y 9059SPN 1 上图报警是电源模块控制板内风扇损坏导致的报警(使用α i电源模块时),报警时电源模块PSM的LED显示2 ”,主轴放大器SPM的LED显示59 ”。 拆下电源模块控制板后,风扇位置如下图所示: 1.3 主轴放大器SPM内冷风扇故障
第九章报警系统
模块九报警系统 教学目标: 1、具备报警系统的组成、功能和故障判断能力。 2、具备火警报警系统的管理、维护能力。 第一单元单元组合式报警系统的组成、分类和功能 一、单元组合式报警系统的组成 单元组合式报警系统主要由分布在机舱各监视点的传感器、安装在集中控制室内的监视屏和控制柜及安装在驾驶台、公共场所、轮机长和轮机员居室的延伸报警箱三大部分组成。 机舱内的各种传感器用来检测各监视点的参数,传感器是监视和报警系统的信息获取装置,可分为模拟量传感器和开关量传感器两大类。模拟量传感器是把被测参数变换成连续变化的电信号,即模拟量信息。它适用于既要监视运行设备工作是否正常.又要随时显示其运行参数的监视点。开关量传感器是把被测参数是否越限变换成触点的断开或闭合信息,即开关量信息。它仪适用于监视运行设备是否工作正常的监视点,而不能用于显示其运行参数。 报警控制单元是系统的核心单元:根据监视点的性质不同可分为模拟量报警控制单元、开关量报警控制单元、电机运转报警控制单元和主机排气温度报警控制单元四种形式。报警控制单元根据传感器送来的现场信息与控制台来的闭锁信号、功能试验信号和试灯信号进行逻辑判断,以控制报警指示灯的状态,起动声响报警、分组延伸报警及故障打印。其中模拟量报警控制单元或排气温度报警控制单元,还可以把被测参数送到显示单元进行显示,并在传感器发生故障时输出传感器故障信号至自检单元,使系统进入自身故障报警状态。。报警器控制单元用来控制机舱内的电笛和旋转警灯以及集中控制室内的蜂呜器。闪光源单元用来提供系统所需的快、慢闪脉冲信号。自检单元用来监测系统的自身故障。显示单元用来指示模拟量报警控制单元送来的被测参数或报警极限值。打印记录单元用来打印状态参数或报警记录。延伸报警控制单元用来把报警控制单元中各监视通道送来的故障报警信号归类分组后,传送到各个延伸报警箱,以实现分组功能。此外,还进行三分钟失职报警控制,它从故障报警控制单元发出分组报警信号时开始计时,直到接收到集中控制室消音应答信号时才复位。若计时时间超过
FANUC报警总表
A 报警列表 A.1 报警列表(CNC) (381) (1) 与程序操作相关的报警(PS报警) (381) (2) 与后台编辑相关的报警(BG报警) (381) (3) 与通讯相关的报警(SR报警) (381) (4) 参数写入状态下的报警(SW报警) (401) (5) 伺服报警(SV报警) (401) (6) 与超程相关的报警(OT报警) (405) (7) 与存储器文件相关的报警(IO报警) (405) (8) 请求切断电源的报警(PW报警) (406) (9) 与主轴相关的报警(SP报警) (406) (10) 过热报警(OH报警) (408) (11) 其他报警(DS报警) (408) (12) 与误动作防止功能相关的报警(IE报警) (410) A.2 报警列表(PMC) (411) A.2.1 显示在PMC报警画面的信息 (411) A.2.2 PMC系统报警信息 (414) A.2.3 操作错误 (415) A.2.4 I/O通信错误 (423) A.3 报警列表(串行主轴) (426) A.4 错误代码列表(串行主轴) (431) A.1 报警列表(CNC) (1) 与程序操作相关的报警(PS报警) (2) 与后台编辑相关的报警(BG报警) (3) 与通讯相关的报警(SR报警) 这些报警种类的报警号为公用的编号。 根据报警的状态,以 PS“报警号”例)PS0003 BG“报警号”例)BG0085 SR“报警号”例)SR0001 的方式予以显示。 报警号信息内容 0001 TH错误输入设备的读入过程中检测出了TH错误。 引起TH错误的读入代码和是从程序段数起的第几 个字符,可通过诊断画面进行确认。 0002 TV校验错误在单程序段的TV检测中检测出了错误。 通过将参数TVC(No.0000#0)设定为0可以使系统 不进行TV检测。 0003 数位太多指定了比NC指令的字更多的允许位数。此允许位 数根据功能和地址而有所不同。 0004 未找到地址 NC语句的地址+数值不属于字格式。 或者在用户宏程序中没有保留字、或不符合句法时 也会发出此报警。 0005 地址后无数据不是NC语句的地址+数值的字格式。 或者用户宏程序中没有保留字、或不符合句法时会 发出此报警。 0006 负号使用非法在NC指令的字、系统变量中指定了负号。 0007 小数点使用非法在不允许使用小数点的地址中指定了小数点。或者 指定了2个或更多个小数点。
(完整版)中国铁塔动环常见告警处理指导手册
中国铁塔动环常见告警处理指导手册一、FSU离线告警 告警名称:FSU离线; 告警解释:FSU和铁塔集团平台连接通讯中断; 原因分析:1)信号差或不稳定;2)FSU设备掉电;3)无线模块硬件故障;4)FSU设备硬件故障;5)天线和无线模块连接中断,或天线丢失;6)VPN服务器连接不上;7)SIM卡被盗、欠费或故障。平台处理方法:查询历史告警记录,如频繁离线或长时间离线,需现场检查。 现场处理方法: 第一步检查供电: 1)在运维监控系统检查离线站点是否有停电告警,判断是否现场停电; 2)现场检查FSU指示灯不亮设备没有供电。 原因分析:FSU供电异常。 解决方案: 1)检查整个基站是否停电,如停电则通知相关人员取电; 2)检查FSU供电空开是否跳闸及通电线路是否正常。 第二步检查无线模块: 检查无线模块指示灯都不亮或都常亮。
原因分析:无线模块供电异常或无线模块故障。 解决方案: 1)无线模块供电故障,则检查给无线模块供电接线是否正常如正常,则用万用表测量给无线模块供电FSU输出端是否有12V,如没有则为FSU供电板问题,更换FSU供电板。 2)确认供电正常,则更换无线模块进行测试。 下站建议:下站时建议随身带上一套可以成功拨号的无线网卡和SIM 卡,下站的时候作对比验证,快速确认是SIM卡问题,还是无线模块问题。 第三步FSU检查 通过EISUConfig软件登陆FSU设备,点击设备诊断管理。 1)信号强度弱:通过设备软件登录设备,如信号强度小于15。
解决方案:更换运营商无线模块或将天线外延(室内站放到室外,室外柜放到底部隐蔽区域或有外层保护情况下放到机柜顶部) 2)铁塔VPN网络连接异常:铁塔VPN网络提示连接异常 3)铁塔网管未注册:铁塔网管提示连接异常(正常显示连接正常)解决方案: 确认总部平台正常,重启FSU(等待程序连接)。如重启后未恢复,联系厂家专业人员。 平台恢复确认:告警管理-活动告警监控-当前告警查询该站点,确认告警是否消除。 二、电源配套告警 2.1开关电源类告警: 2.1.1开关电源通信状态告警 告警名称:开关电源通信状态告警; 告警解释:开关电源和FSU之间的通讯中断; 原因分析:开关电源和FSU之间的通讯中断 平台处理方法:无 现场处理方法:检查开关电源屏幕是否显示正常,和FSU的监控线连接是否正常。
安防系统专业术语
安防系统专业术语介绍 术语, 安防, 系统, 专业 一般安全防范术语 001 security(安全) 对生命、财产、环境、信息等的安全防护。 002 security system(安全系统) 为了生命、财产、环境、信息等腰三角形的安全防护而协同工作的一系列体系。 003 alarm(报警) 形成预先规定的生命、财产、环境、信息等的危险存在时,为了引起关注产生的信号或其它信号。004 false alarm(误报警) 由于非警戒本意的原因而引起的报警。 005 operation signal(状态信号) 指示系统工程状态的信号。 006 tamper device(防拆功能) 以探测对安全防范报警设备故意破坏的为目的功能。 007 安全防范设备 以防止犯罪为目的设备。 008 burglar alarm system(安全防范报警设备) 用于防止犯罪的手动或自动报警设备。 009 normal close(常闭状态) 在警戒状态,系统报警输出部件接点是“闭合”的状态。 010 normal open(常开状态) 在警戒状态,系统报警输出部件接点是“开路”的状态。 011 signal transfer output(报警输出) 在报警发生时,从报警控制器向外围设备输出的接点信号或其它信号。 012 online alarm system(在线报警系统) 借助通信线路实时传输报警信号等并由保安公司等的集中监视设备进行监视的系统。 013 sensitivity margin(灵敏度冗余) 在探测器安装场所环境恶化时,为了探测器仍保持正常控测状态而预留的灵敏度余量。 014 intruder alarm system(入侵报警系统) 进行入侵者探测,并能产生报警的系统。 015 guard line(警戒线) 基本警戒线和细化后的警戒线的总称。 016 alarm response time(报警响应时间) 从报警控制器接受到探测器的报警信号到形成报警状态的时间。 017 detection response speed(探测响应速度)
FANUC i系统常见有报警信息的故障排除
FANUC 0i系统常见有报警信息的故障排除 ??? FANUC 0i数控系统具有较强的自诊断功能,对于一些常见的故障,通过报警信息,对应维修说明书,能够解决许多问题。下面介绍几个常见报警故障的处理方法。 1、500好报警(超行程报警)的排除方法 在数控机床操作的过程中超行程报警经常出现,由于惯性的原因,当移动轴压下行程开关时,需减速停止,同时,系统出现500号报警,并同时显示报警信息为过行程及过行程的坐标轴。 下面是解除“500 过行程:+X”报警的基本步骤: 1)进给轴选择旋钮拨到“X”轴处; 2)进给倍率选择旋钮拨到“× 1”处; 3)旋转手摇脉冲发生器使X轴向负方向移动,离开极限位置; 4)按下MDI键盘上的“RESET”键,报警信息消失。 2、90号报警(返回参考点位置异常)的排除方法 报警条件:当返回参考点位置偏差过大或CNC没有收到伺服电机编码器转信号,出现90号报警。 解除步骤: 1)确认DGN.300中的值(允许位置偏差量)大于128。否则提高进给速度,改变倍率。2)确认电机回转是否大于1转。小于1转,说明返回的起始位置过近。调整到远一些。 3)确认编码器的电压是否大于4.75V(拆下电机后罩,测编码器印制板的+5――0V),如果低于4.75V,更换电池。 4)如果不是上述问题,一定是硬件出了问题:更换编码器。 3、401号报警(伺服准备信号报警) 报警条件:伺服放大器的准备信号(VRDY)没有接通,或者运行时信号关断。 解除步骤: 1)PSM控制电源是否接通;
2)急停是否解除; 3)最后的放大器JX1B插头上是否有终端插头; 4)MCC是否接通,如果除了PSM连接的MCC外,还有外部MCC顺序电路,同样要检查。 5)驱动MCC的电源是否接通; 6)断路器是否接通; 7)PSM或SPM是否发生报警。 如果伺服放大器周围的强电电路没有问题,更换伺服放大器;如果以上措施都不能解决问题,更换主轴控制卡。 ------------------------------------------ FANUC 0i系统常见无报警信息的故障排除 1、诊断功能的使用 数控系统发生故障后,如无报警信息,通过系统的诊断画面进行故障判断。系统的诊断画面在机床出现异常时,诊断功能提供的报警信号和监控数据为故障判断提供了判断的依据。 ????? 调出诊断画面的操作方法如下: 诊断号的注释见附录2 2、利用诊断功能诊断故障 如何有效地使用诊断功能提供的诊断信息来帮助查找和排除故障呢?这一定是我们最为关注的问题。接着来学习如何使用诊断功能去解决一些在实际中经常出现的一些隐性故障。 (1)诊断号000为1时,表明系统正在执行辅助功能(M指令)。在辅助功能的执行过程中,000号将会保持为1,直到辅助功能执行完了信号到达为止。因此,当出现辅助功能执行时间超出正常值时,可能是辅助功能的条件未满足。所以出现无报警的异常,查找故障点时,若诊断号000为1,可以首先检查辅助功能所要完成的机床动作是否已经完成。 故障现象:一数控机床在自动运行状态中,每当执行M8(切削液喷淋)这一辅助功能指令时,加工程序就不再往下执行了。此时,管道是有切削液喷出的,系统无任何报警提示。
报警系统常见问题及解答
报警系统常见问题及解答 1、控制器开机无显示 1)检查交流电220V是否有或电源开关有没有打开。 2)开关电源故障。 3)控制器液晶模块故障。 2、控制器显示备电故障 1)检查蓄电池电压,蓄电池电压应为21伏以上,如电池损坏则需要更换。 2)检查备用电源开关是否打开。 3)控制器CPU板故障。 3、控制器显示主电故障 1)检查交流电220V是否有或电源开关有没有打开。 2)开关电源故障。 3)控制器CPU板故障。 4、控制器显示未编故障 1)可能部件未编程,需要将程序编上。若还报,则检查部件地址是否正确。 2)若编上程序后还报,则检查部件地址,看是否正确。 3)以上都正确的情况下,则说明部件故障,需将故障部件发回厂家维修。
5、因输入模块、输入输出模块受干扰,造成系统工作不正常 当输入模块、输入输出模块反馈端的反馈信号线来自强电柜时,可能会带来强电干扰信号,造成该模块、某回路,乃至整个系统工作不稳定,可通过继电器无源触点接入模块输入端来解决。 6、常见线路问题 1)总线接地、总线对地绝缘阻值太低,造成系统不稳定(导线穿管时损伤、长期浸泡在水中、接头或端子与预埋盒接触、总线接口板损坏等); 2)总线与其它线路间绝缘电阻较低、不同回路总线间绝缘电阻低; 3)24V电源接反(造成模块报24V断线故障); 4)24V与总线接混淆(24V错接到总线端子,总线错接到24V端子); 5)室外线路未采取防雷、避雷措施,经常因雷击造成系统损坏。 解决方法: 在线路敷设完成后,应测试线路对地电阻,应该大于20MΩ。(包括总线、24V电源、电话线、广播线、层显485总线等)。 测试总线、24V电源、电话线的线间电阻,不应该小于100KΩ;广播线的线间电阻一般应大于10Ω。 检查总线与24V、电话线、广播线的之间的电阻,不应出现短路现象。 室外布线应穿钢管附设,并采取防雷、防水措施。
常见传输告警含义.
以上这些告警维护信号产生机理的简要说明如下: ●ITU-T建议规定了各告警信号的含义: ●LOS:信号丢失,输入无光功率、光功率过低、光功率过高,使BER劣于10-3。 ●OOF:帧失步,搜索不到A1、A2字节时间超过625μs 。 ●LOF:帧丢失,OOF持续3ms以上。 ●RS-BBE:再生段背景误码块,B1校验到再生段——STM-N的误码块。 ●MS-AIS:复用段告警指示信号,K2[6 —8]=111超过3帧。 ●MS-RDI:复用段远端劣化指示,对端检测到MS-AIS、MS-EXC,由K2[6 - 8]回发过来。 ●MS-REI:复用段远端误码指示,由对端通过M1字节回发由B2检测出的复用段误块数。 ●MS-BBE:复用段背景误码块,由B2检测。 ●MS-EXC:复用段误码过量,由B2检测。 ●AU-AIS:管理单元告警指示信号,整个AU为全“1”(包括AU-PTR)。 ●AU-LOP:管理单元指针丢失,连续8帧收到无效指针或NDF。 ●HP-RDI:高阶通道远端劣化指示,收到HP-TIM、HP-SLM。 ●HP-REI:高阶通道远端误码指示,回送给发端由收端B3字节检测出的误块数。 ●HP-BBE:高阶通道背景误码块,显示本端由B3字节检测出的误块数。 ●HP-TIM:高阶通道踪迹字节失配,J1应收和实际所收的不一致。 ●HP-SLM:高阶通道信号标记失配,C2应收和实际所收的不一致。 ●HP-UNEQ:高阶通道未装载,C2=00H超过了5帧。 ●TU-AIS:支路单元告警指示信号,整个TU为全“1”(包括TU指针)。 ●TU-LOP:支路单元指针丢失,连续8帧收到无效指针或NDF。 ●TU-LOM:支路单元复帧丢失,H4连续2—10帧不等于复帧次序或无效的H4值。 ●LP-RDI:低阶通道远端劣化指示,接收到TU-AIS或LP-SLM、LP-TIM。 ●LP-REI:低阶通道远端误码指示,由V5[1 —2]检测。 ●LP-TIM:低阶通道踪迹字节失配,由J2检测。 ●LP-SLM:低阶通道信号标记字节适配,由V5[5 —7]检测。 ●LP-UNEQ:低阶通道未装载,V5[5 —7]=000超过了5帧。 为了理顺这些告警维护信号的内在关系,我们在下面列出了两个告警流程图。 图4-13是简明的TU-AIS告警产生流程图。TU-AIS在维护设备时会经常碰到,通过图4-13分析,就可以方便的定位TU-AIS及其它相关告警的故障点和原因。
FANUC 0i系统故障报警信息
FANUC 0i系统故障报警信息 [ 内容简介] 总结本次故障,虽然在报警信号信息屏幕上所显示的是系统报警,给人的第一感觉就是数控系统出现问题了,但不是绝对都是这样的,这个故障就是一个例外,这实质上是一个外围故障。 1、报警信息的查看方法 数控系统可对其本身以及其相连的各种设备进行实时的自诊断。当数控机床出现不能保证正常运行的状态或异常都可以通过数控系统强大的功能,对其数控系统自身及所连接的各种设备进行实时的自诊断。当数控机床出现不能满足保证正常运行的状态或异常时,数控系统就会报警,并将在屏幕中显示相关的报警信息及处理方法。这样,就可以根据屏幕上显示的内容采取相应的措施。 一般情况下,系统出现报警时,屏幕显示就会跳转到报警显示屏幕,显示出报警信息,如图所示:
某些情况下,出现故障报警时,不会直接跳转到报警显示屏幕,如图所示: FANUC 0i数控系统提供了报警履历显示功能,其最多可存储并在屏幕上显示的50个最近出现的报警信息。大大方便了对机床故障的跟踪和统计工作。显示报警履历的操作如下:
2、FANUC 0i数控系统报警的分类 FANUC 0i数控系统的报警信息很多,可以归纳为以下类别,便于查找。 表7.1FANUC 0i数控系统报警分类 3、常见报警的故障排除思路 数控机床是当代高新技术机、电、光、气一体化的结晶,电气复杂,管路交叉林立,故障现象也是千奇百怪,各不相同。如何能
迅速找出故障、隐患,并及时排除?这是数控机床维修人员所面临的最现实、最直接的问题。 在这里,我们将以最常碰到的故障为例,学习使用FANUC 0i 数控系统提供的丰富的维修功能进行故障排除的方法。为方便起见,把由机床厂家根据不同的机床结构所可以预见的异常情况汇总后,由机床厂家自己编写错误代码和报警信息,这类故障称为外围报警(这是相对于数控系统而言)。也就是说不同结构类型的机床就会有不同的外部故障的错误代码和报警信息。而由数控系统生产厂家根据数控系统部件所能预见的异常情况汇总后,所编写的错误代码和报警信息,这类故障称为系统报警(数控系统故障)。数控系统故障的错误代码和报警信息不会因不同结构类型的机床而改变,不同型号的数控系统的系统报警可能会有所不同。系统报警是数控系统生产厂家在数控系统传递到机床厂家之前就编写好的,是固定不变的,机床厂家没法对其进行编辑和增删。 在一般情况下,外围故障的发生机率较系统故障的机率要高。不同结构类型的机床就会有不同的外围故障,而若要能够做到对外围故障做出快速准确的定位和排除,就必须对你所要维修的机床的机械结构、电气原理、数控系统、各个机床动作、操作方法有一个全面的认识。若在机床正常的时候,对机床的每一个动作进行仔细的观察,便能够在机床异常(也就是说机床动作不能正常进行)时,根据平时观察所得与之对比,从而做到对故障的快速诊断与排除。与此同时,高效地使用FANUC 0i系统提供的丰富的维修功能,包
报警系统
报警系统 一、入侵探测器概述 入侵探测器的种类 1.按用途或使用的场所不同来分可分为户内型入侵探测器、户外型入侵探测器、周界入侵探测器、重点物体防盗探测器等等。 2.按探测器的探测原理不同或应用的传感器不同来分可分为雷达式微波探测器、微波墙式探测器、主动式红外探测器、被动式红外探测器、开关式探测器、超声波探测器、声控探测器、振动探测器、玻璃破碎探测器、电场感应式探测器、电容变化探测器、视频探测器、微波—被动红外双技术探测器、超声波—被动红外双技术探测器等等。 3.按探测器的警戒范围来分可分为点控制型探测器、线控制型探测器、面控制型探测器及空间控制型探测器。 请参看表1-1。 表1-1 按探测器的警戒范围分类 4.按探测器的工作方式来分可分为主动式探测器与被动式探测器。 5.按探测器输出的开关信号不同来分。可分为常开型探测器和常闭型探测器以及常开/常闭型探测器。参看图1-3(a)和图1-3(b)。 图1-3 常开型探测器与常闭型探测器 当需要将几个探测器同时接在一个防区时,可采用以下的方式连接。参看图1-4。只要其中有一个探测器发出短路或开路报警信号,报警控制器就可发出声光报警信号。
图1-4 几个探测器同时接在一个防区的情况 6.按探测器与报警控制器各防区的连接方式不同来分基本上可分为三种方式,这就是四线制、两线制和无线制三种。 四线制:参看图1-5。 图1-5 四线制 一般常规需要供电的探测器,如红外探测器、双鉴探测器、玻璃破碎探测器等均采用的是四线制。 如某种被动红外器的接线端子板上的标注如图1-6所示。 图1-6 某种被动红外探测器的接线端子板 又如某种微波—被动红外双鉴探测器的接线端子板上的标注如图1-7所示。
发那科机器人常见故障代码和故障处理方法
常用故障代码和故障排除方法 伺服 - 001操作面板紧急停止 SRVO- 001 Operator panel E-stop [现象]按下了操作箱/操作面板的紧急停止按扭。 SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。(注释) [对策1]解除操作箱/操作面板的紧急停止按扭。 [对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。 [对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。逐一更换开关单元或操作面板。 [对策4]更换配电盘。 [对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。 在采取对策6之前,完成控制单元的所有程序和设定内容的备份。 [对策6]更换配电盘。 (注释)SYST-067面板HSSB断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。(参阅示教操作盘的报警历史画面) 伺服-001操作面板紧急停止 伺服-004栅栏打开 サーボ-007外部紧急停止 伺服-204外部(SVEMG异常)紧急停止 伺服-213保险丝熔断(面板PCB) 伺服-280SVOFF输入 伺服 - 002示教操作盘紧急停止 SRVO- 002 Teach pendant E-stop [现象]按下了示教操作盘的紧急停止按扭。 [对策1]解除示教操作盘的紧急停止按扭。 [对策2]更换示教操作盘。 伺服 - 003紧急时自动停机开关 SRVO- 003 Deadman switch released [现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。 [对策1]按下紧急时自动停机开关并使机器人操作。 [对策2]更换示教操作盘。 伺服 - 021SRDY断开(组:i轴:j) SRVO- 021 SRDY off (Group:i Axis:j) [现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY处在断开状态。(所谓HRDY,就是主机相对于伺服发出接通还是断开伺服放大器的电磁接触器的信号。SRDY是伺服相对于主机发出伺服放大器是否已经停止的信号。
fanuc伺服驱动器的常见故障(1)
FANUC交流速度控制单元有多种规格,早期的交流伺服为模拟式,目前一般都使用数字式伺服,在数控机床中,常用的规格型号有以下几种: 1)与FANUC交流伺服电动机AC0、5、10、20M、20、30、30R等配套的模拟式交流速度控制单元。它是FANUC最早的AC伺服产品,速度控制单元采用正弦波PWM控制,大功率晶体管驱动。在结构形式上,可以分单轴独立型、双轴一体型、三轴一体型三种基本结构。单轴独立型速度控制单元,常用的型号有 A06B-6050-H102/H103/H104/H113等;双轴一体型速度控制单元,常用的型号有A06B-6050-H201/H202/H203等;三轴一体型速度控制单元,常用的型号有A06B-6050-H401/H402/H403/H404等,多与FANUC 11、0A、0B等系统配套使用。 2)与FANUC交流S (L、T)系列伺服电动机配套的S (L、C)系列数字式交流伺服驱动器,它是FANUC中期的AC伺服产品,驱动器采用全数字正弦波PWM控制,IGBT驱动。其中,S系列用量最广,规格最全;L 系列只有单轴型结构,常用的型号有A06B-6058-H001-H007/H102/H103等;C系列有单轴型、双轴型两种结构,常用的单轴型有A06B-6066-H002-H006等规格,常用的双轴型有A06B-6066-H222~H224/H233、H234、H244等规格。 作为常用规格,S系列有单轴型、双轴型、三轴型三种结构,常用的单轴型有 A06B-6058-H001~H007/H023/H025等;常用的双轴型有A06B-6058-H221~H231/H251-H253等规格;常用的三轴型有A06B-6058-H331-H334等规格;多与FANUC 0C、11、15系统配套使用。 3)与FANUC α/αC/αM/αL系列伺服电动机配套的FANUC α系列数字式交流伺服驱动器,它是FANUC 当前常用的AC伺服产品,驱动器带有IPM智能电源模块,采用全数字正弦波PWM控制,IGBT驱动。FANUC α系列数字式交流速度控制单元有如下两种基本结构形式: ①各驱动公用电源模块(PSM)、伺服驱动单元(SVM)为模块化安装的结构形式,驱动器可以是单轴型、双轴型与三轴型三种结构。常用的单轴型有A06B-6079-H101~H106等,常用的双轴型有 A06B-6079-H201~H208等规格,常用的三轴型有A06B-6079/6080-H301~H307等规格,多与FANUC 0C、15A/B、16A/B、18A、20、21系统配套使用。 ②电源与驱动器一体化(SVU型)的结构形式,各驱动器单元可以独立安装,有单轴型、双轴型两种结构,常用的单轴型有A06B-6089-H10l~H106等规格,常用的双轴型有A06B-6089-H201~H210等规格,多与FANUC 0C、0D、15A/B、16A/B、18A、20、21系统配套使用。 4)与FANUC β系列伺服电动机配套的FANUC β系列数字式交流伺服驱动器,它亦是FANUC当前常用的AC伺服产品,采用电源与驱动器一体化(SVU型)的结构,驱动器带有IPM智能电源模块,采用全数字正弦波PWM控制,IGBT驱动。可以使用PWM接口、I/OLink接口,亦可以采用光缆接口。型号为 A06B-6093-H101~H104/H151~H154//H111-H114,多与FANUC 0TD、PM01等经济型数控系统配套使用。 5)与FANUC αi系列伺服电动机配套的FANUCα i系列伺服驱动器是FANUC公司的最新产品,它在FANUC α系列的基础上作了性能改进。产品通过特殊的磁路设计与精密的电流控制以及精密的编码器速度反馈,使转矩波动极小,加速性能优异,可靠性极高。电动机内装有脉冲/转极高精度的编码器,作为速度、位置检测器件,使系统的速度、位置控制达到了极高的精度。 α i系列驱动器由电源模块(PSM)、伺服驱动器(SVM)、主轴驱动器(SPM)等组成,伺服驱动与主轴驱动共用电源模块,组成伺服/主轴一体化的结构。伺服驱动模块有单轴型、双轴型、三轴型三种基本规格。标准型(FANUC αi系列)为200VAC输入,常用的单轴型有A06B-6114-H103~H109等,双轴型有 A06B-6114-H201-H211等,三轴型有A06B-6114-H301~H304等。高电压输入型(FANUC α i(HV)系列)为400VAC 输入,常用的单轴型有A06B--6124-H102~H109等,双轴型有A06B-6124-H201-H211等,目前尚无三轴型结构。FANUC αi系列交流数字伺服配套的数控系统主要有FANUC 0i、FANUC 15i/150i、 FANUC16i/18i/l60i/180i/20i/21i等。
什么是防盗报警系统
什么是防盗报警系统? 要了解防盗报警系统就必须了解安全防范系统,首先看看GB 50348-2004《安全防范工程技术规范》是怎么定义的: 安全防范系统(SPS,Security and Protection System)以维护社会公共安全为目的,运用安全防范产品和其它相关产品构成的入侵报警系统、视频安防监控系统、出入口控制系统、防爆安全检查系统等;或由这些系统为子系统组合或集成的电子系统或网络。 安全防范(系统)工程(ESPS,Engineering of Security and Protection System)以维护社会公共安全为目的,综合运用安全防范技术和其它科学技术,为建立具有防入侵、防盗窃、防抢劫、防破坏、防爆安全检查等功能(或其组合)的系统而实施的工程。通常也称为技防工程。 安全管理系统(SMS,Security Management System)对入侵报警、视频安防监控、出入口控制等子系统进行组合或集成,实现对各子系统的有效联动、管理和/或监控的电子系统。 入侵报警系统(IAS,Intruder Alarm System)利用传感器技术和电子信息技术探测并指示非法进入或试图非法进入设防区域的行为、处理报警信息、发出报警信息的电子系统或网络。 由以上的定义可知入侵报警系统只是安全防范系统的一部分,两者有着很大的区别,但是很容易被互相混淆,在本书中重点探讨的是入侵探测系统,笔者在这里也试图给入侵探测系统增加一些新的定义。 入侵探测系统也被称之为防盗报警系统,主要应用于小区、大厦、工厂,火车站、机场、高速公路、码头、监狱、边防线和城市等其它场所,针对不同的应用场所名称可能不同,比如针对小区可能成为两个系统:周界防范报警系统和家庭防盗报警系统。如果将防盗报警系统的范围扩大,还要包括防盗门、保险柜、商品防盗系统、金属探测系统和安检系统等,而这些本书不进行更多探讨。
FANUC系统常见报警中文对照及解决方法资料
FANUC系统常见报警中文对照及解决方法 1005 X AXIS INTERLOCK , INHIBIT MACHINE MOVING 产生状态及原因 X轴闭锁.禁止移动(没在交换台过程中,没在修调方式,台板1或2在伸出位 X轴锁住,不能移动 设D493=1进入修调方式.检查继电器,电磁阀,开关及线路 1006 Y AXIS INTERLOCK , INHIBIT MACHINE MOVING 产生状态及原因 机械手臂在主轴側 Y轴锁住,不能移动. 设D499=1进入修调方式.检查继电器,电磁阀,开关及线路 1007 Z AXIS INTERLOCK , INHIBIT MACHINE MOVING 产生状态及原因 机械手臂在主轴側 ZY轴锁住,不能移动. 设D499=1进入修调方式.检查继电器,电磁阀,开关及线路
1010 SPINDLE TOOL NOT CLAMP 产生状态及原因 主轴刀具未夹紧。 主轴不能旋转。 检查主轴刀具夹紧开关,确认动作正常后, 同时按下键和键,清除报警。 1011 SPINDLE TOOL NOT UNCLAMP 产生状态及原因 主轴刀具未松开。 主轴不能旋转。 检查主轴刀具松开开关,确认动作正常后, 同时按下键和键,清除报警。 1012 SPINDLE ORIENTAL NOT COMPLETE 产生状态及原因 主轴定向未完成(F45.7没输出)。 不能进行刀具交换。 检查主轴定向开关是否工作正常。 1013 M FUNCTION DID NOT COMPLETE 产生状态及原因 在执行M功能时,可能是某个M代码未执行完.程序加工不能正常进行. 检查是哪一个M功能未执行。
常见设备报警指示及解决办法
常见设备报警指示及解决办法 序号 电脑报警显示 可能出现的问题 解决办法 1 加湿缺水 1、自来水缺水或进水压力 不足; 2、水位报警极板腐蚀烂; 3、水位控制器故障; 1、增压; 2、换极板; 3、换控制器; 2 冷机高压报警 1、系统制冷剂充注量太多; 2、制冷系统有空气; 3、水冷冷凝器排管有堵塞; 4、水冷冷凝器水量不足或 排管表面结水垢; 5、风冷冷凝器积尘或冷凝 风机风量不工作; 6、高压继电器压力设置过低;1、排放过多制冷剂; 2、重新抽真空,加制冷剂; 3、清洗冷凝器; 4、冷却塔补水,并加除垢器除水垢; 5、清洗冷凝器,检查冷凝风机; 6、设定压力值为2.5MPa; 7、人工复位高压报警按钮 3 冷机低压报警 1、系统制冷剂充注量太少; 2、系统制冷剂泄漏; 3、压缩机排气阀已损坏; 4、室外气温过低(风冷机 组); 5、冷却水温度过低(水冷机 组); 1、添加制冷剂; 2、添加制冷剂; 3、更换排气阀; 4、人工复位高压报警按钮 5、关闭冷却塔风机; 4 冷机热过载 1、制冷机电流过大,负荷过 大; 2、套间温度控制太高; 1、清洗冷凝器; 2、降低套间空气温度; 3、人工复位热继电器按钮; 5 风机热过载 1、风机和电机的皮带太松; 2、电机匝间短路; 3、热继电器电流设定值太 小; 1、更换皮带; 2、重绕电机; 3、设定为额定值的1.3倍; 4、人工复位热继电器按钮; 6 水泵热过载 1、水泵轴承卡死; 2、电机匝间短路; 3、热继电器电流设定值太小;1、转动或更换轴承; 2、重绕电机; 3、设定为额定值的1.3倍; 4、人工复位热继电器按钮; 7 超温报警 1、空气外理机风机损坏; 2、皮带断裂; 3、超温报警设定值太低; 4、超温报警器坏; 1、检查并更换或修理风机; 2、换皮带; 3、设为95℃; 4、更换超温报警器; 8 各设备断路器跳闸 1、断路器选用电流过小; 2、设备电源对地短路; 3、设备电机匝间短路; 1、换大一型号断路器; 2、检查对地电阻; 3、重绕线圈。
防盗报警系统中常见的50个常见名词解释
防盗报警系统中常见的50个常见名词解释(推荐给入门者)。 2008-07-31 防盗报警系统中常见的50个常见名词解释 1、温度补偿 答:当环境温度发生变化(变高或变低)时,探测器会通过热敏电阻阻值的变化来对温度进行补偿。微处理器通过不断地读取热敏电阻两端的电压来监视温度。根据温度值调节PIR的阈值。热释电元件已被优化成对人体温度比较敏感。因此,当背景温度接近人体温度时,灵敏度会降低。通过降低PIR的阈值来对此进行补偿。 2、脉冲计数 答:脉冲计数是指探测器接收到多少个报警脉冲次数才发出报警输出(比如脉冲计数为3,则探测器接收到第三个报警脉冲才报警);脉冲计数的作用是调节探测器的感应灵敏度;计数越高,探测感应灵敏度越低,计数越低则灵敏度越高,在环境较不稳定的地方,要将脉冲计数调高一点,以防误报。 3、探测范围 答:探测范围指探测器正常工作的感应范围,即探测器能够探测到在此范围以内的物体运动。 4、探测距离 答:探测器在正常工作下所能探测到的最远距离。 5、双幕帘夹角 答:方向识别幕帘探测器的两道幕帘之间的夹角。 6、幕帘张角 答:每道幕帘两条边之间的夹角。 7、防宠物技术 答:有两种方式:一种是物理方式,即通过菲涅尔透镜的分割方式的改变来降低由于小宠物引起误报的概率,这种方式是表面的,效果也是有限的。第二种方式是采用对探测信号数字处理分析方式,主要是对探测的信号进行数据采集,然后分析其中的信号周期,幅度,极性。这些因素具体反应出移动物体外形、体积、速度、热释红外能量的大小,以及单位时间内的位移等特征。探测器的微处理器将采集的数据进行分析比较,由此判断移动物体是人还是小动物。 8、双幕帘技术 答:幕帘探测器一般是用于防范窗户、阳台等进出口区域,但安装一般幕帘探测器后,主人在出入阳台也可能触发探测器报警,户主的活动空间随之受到了很大的限制。方向识别幕帘探测器则可解决这一问题。方向识别幕帘一般由双幕帘组成,这两道幕帘分为内幕帘A和外幕帘B。当户主从内往外走动时,先触发内幕帘A,再触发外幕帘B,此时探测器不报警;当入侵者由外往内闯入时,先触发外幕帘B,再触发内幕帘A,此时探测器立即报警。户主出去以后返回室内时,也是先触发外幕帘B再触发内幕帘A,为此需对户主返回与外人入侵进行区别,探测器会在户主出去后进行一定的报警时间延时,以确保户主返回时不报警。 9、四幕帘技术 答:四幕帘组成,其工作原理和上述的双幕帘相同,具备方向识别功能。但其采用了数字信号处理电路(DSP),以及应用了三矢量数位正交分析技术,能够更准确地辨别人体的移动方向,进一步提高方向识别的精确性。 10、发射距离 答:报警系统中器件在接收到信号后将无线报警信号发射出去的最远距离。 11、感应灵敏度 答:指探测器对报警信号的反应速度,感应灵敏度高,在离探测器很远的距离都能探测到,感应灵敏度低,探测器只能探测到较近的范围。传感器输出的变化量Δy与引起该变化量的输入变化量Δx之比。其数值就是两者之间的比值。 12、灵敏度误差
FANUC常见伺服报警及解决方法
FANUC常见伺服报警及解决方法 SV0301:APC报警:通信错误 1、检查反馈线,是否存在接触不良情况。更换反馈线; 2、检查伺服驱动器控制侧板,更换控制侧板; 3、更换脉冲编码器。 SV0306:APC报警:溢出报警 1、确认参数No.2084、No.2085是否正常; 2、更换脉冲编码器。 SV0307:APC报警:轴移动超差报警 1、检查反馈线是否正常; 2、更换反馈线。 SV0360:脉冲编码器代码检查和错误(内装) 1、检查脉冲编码器是否正常; 2、更换脉冲编码器。 SV0364:软相位报警(内装) 1、检查脉冲编码器是否正常; 2、更换脉冲编码器。 3、检查是否有干扰,确认反馈线屏蔽是否良好 。 SV0366:脉冲丢失(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰; 2、更换脉冲编码器。 SV0367:计数丢失(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰; 3、更换脉冲编码器。 SV0368:串行数据错误(内装)报警 1、检查反馈线屏蔽是否良好; 2、更换反馈线; 3、更换脉冲编码器。 SV0369:串行数据传送错误(内装)报警 1、检查反馈线屏蔽是否良好,是否有干扰源; 2、更换反馈线; 3、更换脉冲编码器。
SV0380:分离型检查器LED异常(外置)报警 1、检查分离型接口单元SDU是否正常上电; 2、更换分离型接口单元SDU。 SV0385:串行数据错误(外置)报警 1、检查分离型接口单元SDU是否正常; 2、检查光栅至SDU之间的反馈线; 3、检查光栅尺。 SV0386:数据传送错误(外置) 1、检查分离型接口单元SDU是否正常; 2、检查光栅至SDU之间的反馈线; 3、检查光栅尺。 SV0401:伺服准备就绪信号断开 1、查看诊断No.358,根据No.358的内容转换成二进制数值,进一步确认401报警的故障点。 2、检查MCC回路; 3、检查EMG急停回路; 4、检查驱动器之间的信号电缆接插是否正常; 5、更电源单元。 同步控制中SV0407:误差过大报警 1、检查同步控制位置偏差值; 2、检查同步控制是否正常。 移动轴时SV0409报警 1、检查移动时该轴的负载情况; 2、确认机械是否卡死; 3、确认伺服参数设定是否正常; 4、更换伺服电机; 5、更换伺服驱动器。 SV0410:停止时误差过大报警 1、检查机械是否卡死; 2、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开; 3、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,更换电机或伺服驱动器。 SV0411:移动时误差过大报警 1、查看负载情况,若负载过大。 2、检查机械是否卡死; 3、对于重力轴,抱闸的24VDC供电是否正常,检查抱闸是否正常松开; 4、脱开丝杆等相关机械部分的连接,单独驱动电机,若正常,找MTB检查机械部分;若故障依旧,伺服驱动器。
火灾报警系统试卷
一单项选择题 1.以下哪种形式的探测器是根据火灾探测器对不同火灾参量的影响分类的。 A 感烟探测器 B 点型探测器 C 线型探测器 D 陆用型探测器 2.房间高度在5米以下时,感烟探测器在梁高满足什么条件时可以不考虑梁高的影响。 A 梁高小于300mm B 梁高小于200mm C 梁高大于200mm,小于500mm D 梁高小于500mm 3.疏散用的火灾应急照明,其地面最低照度应该满足什么要求/ A 不低于 B 不低于 C 不低于1lx D 不低于5lx 4.在火灾报警控制器的型号编制中以下哪一个符号代表柜式结构? A Q B J C G D T 5.安装在顶棚上的探测器和各设施的边缘应保持一定的水平距离,以下哪一项的水平距离是错误的? A 距离风扇不小于。 B 距离不突出扬声器不小于。 C 距离空调送风口不小于。 D 距离防火门的间距应为2~3m。 6.按照规范要求,调试前应检查火灾自动报警系统的线路,检查内容包括错线、开路、短路和() A 接线盒 B 固定装置 C 虚焊 D 支座间距 7.疏散指示标志在10~20m的步行距离和转角处需要安装一个,其按照的高度是? A 安装高度应在以下 B 安装高度应在1m以下 C 安装高度应在以下 D 安装高度应在2m以下 8.可以向防护区喷射灭火剂,并使其均匀地充满整个防护区的气体灭火系统叫() A 局部应用系统 B 管网灭火系统 C 无管网灭火装置 D 全淹没系统 9.在气体灭火系统的组成部分中哪一个部分的功能是封闭钢瓶、火灾时释放灭火剂? A 容器阀 B 选择阀 C 压力开关 D 安全阀 10.电动防火门、防火卷帘的抽验,应按实际安装数量的多少抽验联动控制功能? A 1~2个 B 10%~20% C 30%~50% D 全部 二多项选择题