车用自适应前照灯系统设计与研究_钱向明
自适应巡航系统的组成及原理
自适应巡航系统的组成及原理 1.雷达传感器 在ACC系统中,测距雷达用于测量自车与前方车辆的车头距、相对速度、相对加速度,是自适应巡航控制系统中的关键设备之一,也是决定该系统造价的主要元件。其主要组成包括发射天线,接受天线,DPS(数字信号处理)处理单元,数据线等。 毫米波雷达 原理:利用目标对电磁波反射来发现目标并测定其位置,毫米波频率高,波长段。 性能:探测性能稳定,不易受对象表面颜色和形状的影响,也不受大气 流的影响;环境适应性能好,雨、雪、雾等对之干扰小。 单脉冲雷达 原理:雷达每发射一个脉冲,天线能同时形成若干个波束,从各波 束接收的信号之和,可测出目标的距离,从而实现对目标的测量和跟踪。(脉冲:一个物理量在短持续时间内突变后迅速回到其初始状态的过程) 性能:全天候雷达,可以适用各种天气情况,具有探测距离远、探测角 度范围大、踪目标多等优点,但价格高。 微波雷达 原理:微波雷达对运动物体的精确速度检测基于微波多普勒(Doppler)效应。 通过测量回波信号相对发射信号的时间延迟来测距。 性能:着安装维护方便、使用寿命长、几乎不受光照度、灰尘以及风、 雨、雾、雪等天气的影响。
激光雷达 原理:激光器产生并发射一束光脉冲,打在物体上并反射回来,最 终被接收器所接收。接收器准确地测量光脉冲从发射到被反射回的传播时间。因为光脉冲以光速传播,所以接收器总会在下一个脉冲发出之前收到前一个被反射回的脉冲。鉴于光速是已知的,传播时间即可被转换为对距离的测量。 性能:对工作环境的要求较高,对天气变化比较敏感,在雨雪天、风沙 天等恶劣天气探测效想探测范围有限,跟踪目标较少,但其最大的优点在于探测精度比较高,价格低,易于控制和进行二次开发。 红外探测雷达 原理:不同种类的物体发射出的红外光波段是有其特定波段的,人们 可以利用这种特定波段的红外光来实现对物体目标的探测与跟踪。 性能:在恶劣天气条件下性能不稳定,探测距离较短,价格最便宜。 2.电子控制单元(ECU) ACC系统中的核心部分 组成:和普通的单片机一样,由微处理器(CPU)、存储器(ROM、、RAM)、输入/输出接口(I/O)、模数转换器(A/D)以及整形、驱动等大规模集成电路组成。 作用:根据其内存的程序和数据对空气流量计及各种传感器输入的信息进行运算、处理、判断,然后输出指令。 3.其余组成部分: 巡航控制开关,车速设定器,车距设定器,状态显示器,报警器…… 4.相互联系
AFS自适应前照灯系统
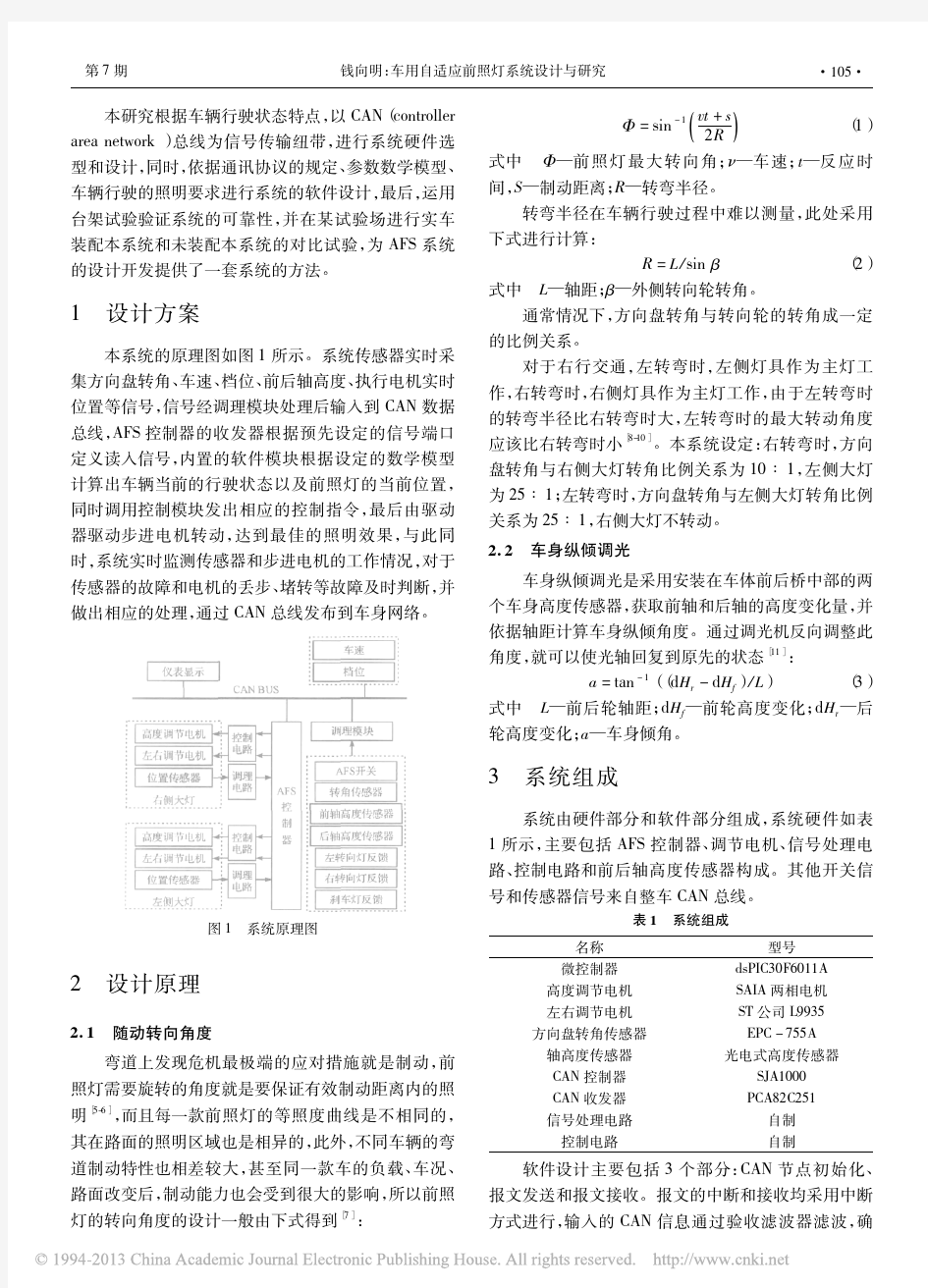
AFS自适应前照灯系统 (Adaptive Front-Loght System) 一、功能 根据车辆的行驶状况、路状以及天气来适时的调节前 照灯的照射角度、形状、光亮度以及照射时间,从而达到 相应状况下的最优照明表现。 二、工作原理及系统图 AFS系统分为两大部分:1、前照灯光束高度自动控制系 统2、智能AFS自适应前照灯系统 1、前照灯光束高度自动控制系统 前照灯点亮时,前照灯光束高度自动控制系统根据车辆的行驶状况,操作前照灯光束高度调节电动机。AFS ECU根据高度控制传感器和各ECU的信号计算车辆状态的变化,然后ECU根据该信息控制前照灯光束高度调节电动机,以改变前照灯反射器角度。
2.智能AFS(自适应前照灯系统) 智能AFS通过移动近光,在转向过程中保持大范围的近光照明及良好的视野。智能AFS 采用中高速控制和低速控制。在中高速控制过程中,系统根据转向角和转速计算目标光照角,并分别改变各近光前照灯的放置角。在低速控制过程中,系统根据转向角计算目标光照角,并改变入弯侧近光前照灯的旋转角。
低速控制 满足下死所有条件,AFS ECU执行低速控制 ·发动机正在运转 ·车辆正以10Km/H或更高的速度向前行驶 ·转向角为6o或更大
·近光灯点亮 ·AFS OFF开关关闭 旋转范围 中速控制 ·发动机正运转 ·车辆正以30Km/h或更高时速前进 ·转向角为o或更大 ·近光灯点亮 ·AFS OFF开关关闭 初始化设定控制
发动机起动时,AFS ECU驱动前照灯旋转执行器,将前照灯投射光束向车辆中间方向移至操作极限位置,然后使其返回到正常位置。从而,AFS ECU估算进行基准控制的前照灯位置。
车辆自适应巡航控制系统(ACC)设计
车辆自适应巡航控制系统(ACC)设计与分析 65090617付裕 一、引言 ACC系统全称就是自适应巡航控制系统,它是一种智能化的行车自动控制系统,它是在早已存在的定速巡航控制技术的基础上发展而来的。在行驶过程中,安装在车辆前部的车距传感器会持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前面的车之间的距离过小时(这可以在车内设定距离),ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,同时车内音响会发出警报声音提醒走神的驾驶员注意,它能有效的防止追尾这类事故的发生。 本文将通过连续系统设计与分析的知识对ACC系统进行分析。 二、研究对象工作过程和要求描述 1.控制原理: 电控单元有两个输入信号,当测出的实际车速高于或低于驾驶员调定的车速时,电控单元将这两种信号进行比较,得出两信号之差,即误差信号,再经放大、处理后成为油门控制信号,送至油门执行器,驱动油门执行器动作,调节发动机油门开度,以修正两输入车速信号的误差,从而使实际车速很快恢复到驾驶员设定的车速,并保持恒定。 2.系统框图如下:
三、被控对象的数学模型建立 m ——汽车质量 g ——重力加速度 f ——滚动阻力系数 C ——空气阻力系数 A ——等效迎风面积 r ——轮胎半径 gi ——变速器速比 di ——主减速器速比 η——传动效率 当获取了自适应巡航状态下的速度控制目标ad后,整车期望转矩 四、控制系统的控制器模型设计 经查询资料可知发动机工作模式下的传递函数如下 综合查询的数据与发动机、变速箱、节气门控制器等传递函数可得,ACC系统的传递函数如下
汽车前照灯-开题报告
毕业论文开题报告 一毕业论文主要内容 研究前照灯照明存在的夜间行车安全问题及自适应前照灯。项目主要内容包括:分析汽车夜间行车时前照灯照明存在的问题;研究如何通过前照灯随动转向解决汽车转弯照明盲区;分析研究前照灯照明度自动控制方法;分析研究前照灯其他自适应控制方案及控制装置的控制原理。 二自适应前照灯研究目的和意义 传统的前照灯系统是由:近光灯、远光灯、行驶灯和前雾灯组合而成。在城市道路行驶并且限速的情况下,主要采用近光;在乡间道路或者高速公路行驶的时候,主要采用远光;雾天行驶的时候,应打开雾灯。但在实际使用中,传统的前照灯系统存在着诸多问题,传统前照灯是以固定的光型提供近光、远光与雾灯等前方照明功能,无法随着路面转弯、岔路、上下坡等各种路面情况转动适当的照明角度,导致道路照明不足,致使车祸的发生率升高。 夜间汽车前照灯照明时,灯光应能使驾驶员看清前方80米以内的交通障碍物,照明光束应对准汽车的前进方向,主光轴方向应偏下。前照灯的发光强度不足或照射方向不合适,都会造成汽车前方情况不明,或给迎面驶来的汽车驾驶员造成眩目,妨碍视野,这些都是导致事故的重要因素。 调查研究显示,82%的车祸意外事故都是在夜间照明效果不良或天气恶劣的情形下发生的,相关资料指出50岁的驾驶者比起20岁的驾驶者需要高达3倍的汽车照明亮度;夜间行驶占总行驶距离约20%,但事故死亡率却占50%以上。在弯道上的事故多于直道上事故,原因除超车不当之外,最大因素是前照灯光型投射的范围不在前方弯道上,导致能见度不足,进而发生车祸。 基于上述问题,从需要设计一套灵活的前照灯系统,此系统能根据行车的方向及速度、驾驶人的驾驶习惯及天气状况的变化自动适应,车辆感应装置会监控这些变化并启动灯光自动控制,将前照灯的灯光调整成远光、近光或是适合转弯时的灯光。这就是自适应前照灯照明系统,即AFS系统(Adaptive front-lighting systems) AFS即自适应前照灯系统,作为汽车智能化控制技术CAN的基础之一,它能够有效地降低驾驶者在夜晚弯路上行车的疲劳程度,使驾驶者能够看清转弯处或上下坡的实际路况,进而有充分的时间来应付紧急情况,从而提升夜晚道路上的行车安全。 三自适应前照灯系统整体方案设计 3.1.自适应前照灯系统组成 自适应前照灯系统是由传感器组件(车速传感器、车身高度传感器、方向盘转角传感器、雨量传感器、光敏传感器等),ECU(大灯照程调节控制单元),执行器(灯光调节电机),三部分组成。 3.2.自适应前照灯系统的基本原理
02自适应巡航控制系统评价规程i-VISTA SM-ADAS-ACCR-A0-2018
i-VISTA 中国智能汽车指数 编号: i-VISTA SM-ADAS-ACCR-A0-2018 自适应巡航控制系统评价规程 Adaptive Cruise Control System Rating Protocol (试行) 中国汽车工程研究院股份有限公司发布
i-VISTA SM-ADAS-ACCR-A0-2018 目录 前言.................................................................... II 1 范围 (1) 2 规范性引用文件 (1) 3 评价方法 (1) 3.1 目标车静止场景 (2) 3.2 目标车低速场景 (2) 3.3 目标车减速场景 (3) 3.4 50%横向重叠试验场景 (3) 3.5 加分项 (4) 附录A (5)
i-VISTA SM-ADAS-ACCR-A0-2018 前言 i-VISTA (Intelligent Vehicle Integrated Systems Test Area)是国家工信部和重庆市政府支持下,共筹共建的具有国际领先水平的智能汽车和智慧交通应用示范工程及产品工程化公共服务平台。基于i-VISTA示范区平台,中国汽车工程研究院股份有限公司在中国汽车工业协会和中国汽车工程学会的联合指导下,充分研究并借鉴国内外智能网联汽车试验评价方法,结合中国自然驾驶数据和中国驾驶员行为统计特性分析的研究成果,经过多轮论证,形成i-VISTA中国智能汽车指数评价体系(简称i-VISTA)。 i-VISTA从消费者立场出发,从安全、体验、能耗、效率四个维度设计试验评价场景,对智能网联汽车进行中立公正专业权威的评价。评价结果以直观量化的等级——优秀(++++)、良好(+++)、一般(++)、较差(+)的形式定期对外发布,为消费者购车用车提供参考,引导整车和零部件企业进对产品进行优化升级。 自适应巡航控制系统(Adaptive Cruise Control System,简称ACC)是先进驾驶辅助系统(Advanced Driver Assistant System,简称ADAS)的子产品之一,为驾驶员在行车过程中提供定速巡航和跟车控制辅助,可有效减轻驾驶员负担。试验规程参考ISO_22179 《Intelligent transport systems —Full speed range adaptive cruise control (FSRA) systems —Performance requirements and test procedures》标准,结合中国自然驾驶数据和中国驾驶员行为统计特性的研究成果设计试验场景。试验场景包括目标车静止、目标车低速、目标车减速、横向重叠共4个场景,以及抬头显示、自适应限速、走停功能等3个加分项。针对每个试验场景,根据体验和安全两个维度计算得分。目标车静止场景主车车速分别为30km/h、40km/h、50km/h和60km/h,目标车低速场景主车车速分别为90km/h、100km/h、110km/h和120km/h,目标车减速场景目标车车速为70km/h,分别以-3m/s2和-4m/s2的减速度制动到停止,这三个工况主要考察ACC的减速能力。横向重叠场景的重叠率分别为±50%,考察ACC的目标识别能力。 i-VISTA管理中心保留对ACC评价项目及方法更改的全部权利。随着国内外标准法规、中国道路交通场景的不断发展、更新和完善,i-VISTA管理中心将对ACC评价项目及方法做出相应的调整,持续完善中国智能汽车指数评价体系,有效促进中国汽车工业水平整体提高和健康持续发展,更加系统全面地为消费者、汽车行业服务。
自适应前照灯系统afs
自适应前照灯系统——AFS AFS系统全名适路性前方照明系统(Adaptive Frontlighting System),他的功能的伸缩性很大,根据我们在车辆照明实际使用过程中所遇到的所有问题而采取的技术革新,就目前能够实现的功能(也就是目前最好的AFS的功能)可以根据车辆的行驶状况(例如高速巡航时、紧急刹车时、启动时等),路况(例如高速公路、城市公路、乡村公路等)以及天气(例如下雨、下雪等)来适时自动的调节前照灯的照射角度、形状、光亮度以及照射时间,从而达到相应状况下的最优光照表现。而我们所采用的AFS的设计比较简单,仅根据车辆行驶方向的改变来控制固定照射角度的转向辅助照明灯。 其使用方法为:在大灯开启状态下,方向盘向左转,大于开启角度的时候,左侧转向辅助照明灯就会自动开启,当方向盘转回来,小于开启角度的时候,转向辅助照明灯会自动关闭;向右转弯同样道理。我们的这个照明系统属于AFS,但是因为它仅根据转向有关,所以我们在跟客户介绍的时候最好用这样的名称介绍----------AFS转向辅助照明系统、AFS转向辅助照明灯。 注意:此照明灯的开启与关闭与转向灯不发生关系,它是根据方向盘转动角度实现的,而转向灯在行驶时还要正常使用,不要因此而违反交通规则。交车时一定要向客户解释清楚! 以上内容是为我店销售顾问做的总结,希望得到大家的指正,加以完善,非常感谢! 下面是从网上下载的一篇关于AFS的介绍 科技的进步带给人们越来越多的惊喜和愉悦,自适应前照灯系统便是一例。它使得夜晚驾驶变得不再令人恐慌,甚至心旷神怡,没准会有更多的驾驶者爱上夜晚出行去享受黑夜的浪漫。 AFS的全称是自适应前照灯系统。作为当今世界最先进的汽车照明系统,它能够有效地降低驾驶者在夜晚弯路上行车的疲劳程度,使驾驶者能够看清转弯处的实际路况,进而有充分的时间来应付紧急情况,从而明显提升夜晚弯路上行车的安全性。 虽然夜晚事故发生率只占所有交通事故的28%,但是其死亡事故的几率却高达白天死亡事故的两倍以上。这再次证明被誉为"汽车眼睛"的车灯对行车安全性及舒适性具有举足轻重的意义。 AFS系统能够减缓驾驶者在夜晚弯路上行车的恐慌情绪,使驾驶者能够拥有充分的时间进行转向操纵和应付紧急情况。自动转向照明具有降低驾驶者夜晚行车劳动强度的重大意义。此系统能够增加弯道的照射面积达20度左右,按照40KM/h的车速测算,能够为驾驶者将反应余量增加3秒以上。这一点对于时常进行夜晚运输的专业驾驶员而言至关重要。 就小糸集团内部的定义来说,现在世界上使用的所谓AFS系统并不是真正意义上的AFS,现在的AFS 只是在自动动态调光系统的基础上增加了转弯照明的功能。真正意义上的AFS系统应该包括根据车辆的行驶状况(例如高速巡航时、紧急刹车时、启动时等),路况(例如高速公路、城市公路、乡村公路等)以及天气(例如下雨、下雪等)来适时自动的调节前照灯的光形,从而达到相应状况下的最优光照表现。 小糸的AFS系统分为前向通道和后向通道两个部分,分别包括车身传感器、BUS节点、控制模块(ECU)以及执行机构等。系统能够根据车身的动态变化、转向机构的动作特性、发动机的工作状态等综合因素进行计算和判断,从而判定汽车当前的行驶状态并对前照灯近光进行相应的调整。带弯道转向照明的AFS系统的执行机构由步进马达来担当,步进马达具有行程准确、动作平稳、工作寿命长等特点。且考虑到系统
系统辨识与自适应控制作业
系统辨识与自适应控制 学院: 专业: 学号: 姓名:
系统辨识与自适应控制作业 一、 对时变系统进行参数估计。 系统方程为:y(k)+a(k)y(k-1)=b(k)u(k-1)+e(k) 其中:e(k)为零均值噪声,a(k)= b(k)= 要求:1对定常系统(a=0.8,b=0.5)进行结构(阶数)确定和参数估计; 2对时变系统,λ取不同值(0.9——0.99)时对系统辨识结果和过程进行 比较、讨论 3对辨识结果必须进行残差检验 解:一(1): 分析:采用最小二乘法(LS ):最小二乘的思想就是寻找一个θ的估计值θ? , 使得各次测量的),1(m i Z i =与由估计θ? 确定的量测估计θ??i i H Z =之差的平方和最小,由于此方法兼顾了所有方程的近似程度,使整体误差达到最小,因而对抑制误差是有利的。在此,我应用批处理最小二乘法,收敛较快,易于理解,在系统参数估计应用中十分广泛。 作业程序: clear all; a=[1 0.8]'; b=[ 0.5]'; d=3; %对象参数 na=length(a)-1; nb=length(b)-1; %na 、nb 为A 、B 阶次 L=500; %数据长度 uk=zeros(d+nb,1); %输入初值:uk(i)表示u(k-i) yk=zeros(na,1); %输出初值 x1=1; x2=1; x3=1; x4=0; S=1; %移位寄存器初值、方波初值 xi=randn(L,1); %白噪声序列 theta=[a(2:na+1);b]; %对象参数真值 for k=1:L phi(k,:)=[-yk;uk(d:d+nb)]'; %此处phi(k,:)为行向量,便于组成phi 矩阵 y(k)=phi(k,:)*theta+xi(k); %采集输出数据 IM=xor(S,x4); %产生逆M 序列 if IM==0 u(k)=-1; else u(k)=1; end S=not(S); M=xor(x3,x4); %产生M 序列
汽车自适应前大灯控制系统的设计
汽 车 自 适 应 前 大 灯 控 制 系 统 设 计 同组成员:。。。 指导教师: 。。。
目录 1前言 (4) 2汽车AFS系统的国内外研究现状 (5) 3自适应前大灯研究的意义 (7) 4汽车自适应前大灯系统总体设计 (8) 4.1 汽车AFS系统的结构组成与基本功能 (8) 4.2 汽车AFS系统的基本原理 (10) 4.3汽车AFS系统建模 (10) 4.3.1线性二自由度汽车模型 (11) 4.3.2前大灯光轴水平方向模型 (11) 4.3.3步进电机模型 (13) 4.3.4前大灯光轴垂直方向调节模型 (13) 4.4PID控制 (14) 4.5云模型控制 (16) 5 汽车AFS控制系统硬件电路设计 (18) 5.1 STC12C5A60AD单片机 (18) 5.2车速信号调理电路 (18) 5.3方向盘转角信号调理电路 (18) 5.4步进电机驱动电路 (19) 5.5电源及断电保护电路 (20) 6汽车AFS控制系统软件设计 (21) 6.1系统软件功能分析 (21) 6.2系统软件设计 (21) 7结论 (23) 摘要:本设计主要完成以传感器作为检测器并通过软件的设计实现适时地对前
大灯灯光调节,从而实现对汽车灯光的自适应控制。这次设计是传感器技术和现代控制技术在汽车制造业中的应用,并且设计了控制系统的硬件电路设计,通过传感器检测到车速和方向盘转角,车身高度的变化,把信号输入单片机中通过程控步进电机执行组件的动作。步进电机的实际转动位置通过位置传感器回馈给MCU,MCU根据不仅电机目标位置与实际位置之差发出调节修正指令,完成调光过程。此设计能免去驾驶员对灯光的反复操作。提高了驾驶安全性和舒适性,减少由于驾驶员对灯光操作及灯光的阴影区多带来的交通事故,也大大挺高了汽车前大灯运行的可靠度。 关键词:汽车、自适应、控制;
车辆自适应巡航控制系统(ACC)设计
车辆自适应巡航控制系统()设计与分析 65090617付裕 一、引言 系统全称就是自适应巡航控制系统,它是一种智能化的行车自动控制系统,它是在早已存在的定速巡航控制技术的基础上发展而来的。在行驶过程中,安装在车辆前部的车距传感器会持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前面的车之间的距离过小时(这可以在车内设定距离),控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,同时车内音响会发出警报声音提醒走神的驾驶员注意,它能有效的防止追尾这类事故的发生。本文将通过连续系统设计与分析的知识对系统进行分析。 二、研究对象工作过程和要求描述 1.控制原理: 电控单元有两个输入信号,当测出的实际车速高于或低于驾驶员调定的车速时,电控单元将这两种信号进行比较,得出两信号之差,即误差信号,再经放大、处理后成为油门控制信号,送至油门执行器,驱动油门执行器动作,调节发动机油门开度,以修正两输入车速信号的误差,从而使实际车速很快恢复到驾驶员设定的车速,并保持恒定。 2.系统框图如下:
三、被控对象的数学模型建立 m ——汽车质量 g ——重力加速度 f ——滚动阻力系数 C ——空气阻力系数 A ——等效迎风面积 r ——轮胎半径 ——变速器速比 ——主减速器速比 η——传动效率 当获取了自适应巡航状态下的速度控制目标后,整车期望转矩 四、控制系统的控制器模型设计 经查询资料可知发动机工作模式下的传递函数如下 综合查询的数据与发动机、变速箱、节气门控制器等传递函数可得,系统的传递函数如下
五、仿真结果单位阶跃响应: 伯德图
汽车_自适应前照灯控制系统
第一篇自适应前照灯控制系统(AFS) 自适应前照灯控制系统(AFS) AFS能够根据汽车方向盘角度和车速,不断对大灯进行动态调节,适应当前的转向角,保持灯光方向与汽车的当前行驶方向一致,以确保对前方道路提供最佳照明并对驾驶员提供最佳可见度,从而显著增强了黑暗中驾驶的安全性。 系统结构: AFS电子控制模块,包括一个Master和两个Slave。AFS主要是根据车辆和道路状况,来控制前照灯左右和上下的照射角度,从而提高驾驶员的视野,提升夜间驾驶的安全性。Master控制器以汽车方向转角、车速和前后轴高度等高速CAN总线信号或者真实传感器信号作为输入,经过复杂的控制逻辑和算法,得到期望的近光灯照射角度;并通过LIN总线发给左右两个Slave控制器,Slave再驱动电机来实现照射角度的实时动态变化。
系统功能: 具有随动转向氙气大灯(HID)的光线照亮范围角度能够外侧旋转15°,内侧旋转7°。同时还能针对车速,以及汽车轴荷变化(载重量变化,加速和减速,上下坡等)情况来改变车灯上下的高度来保证合理的照射距离。不仅如此,AFS控制模块还能保证在颠簸路面和短时间的路面冲击下,前照灯照射距离不会进行频繁调整,以提高系统鲁棒性,防止驾驶员眼睛疲劳。 除此之外,AFS还可以根据环境状况(如雨,雾)来适当的调整前照灯的角度。 在技术上,Master和Slave都具有Bootloader功能,实现控制程序和标定模块的在线升级和下载。AFS控制模块还可以根据不同地域,不同车型的要求,通过配置标定模块来实现所需要的不同功能。
第二篇自适应转向大灯系统(2008-08-06 17:24:58)标签:汽车前照灯led模块大 灯情感 智能驱动和控制技术为汽车行驶安全带来革命性变化作者:邹治永时间:2006-11-03 来源: 电子产品世界浏览评论汽车前照灯主要是用于汽车夜间行驶照明。它的亮度和照射方向对于行车安全是至关重要的。夜间汽车所有前照灯同时照明时,灯具应具有能使驾驶员看清前方100米距离以内交通障碍物的性能,照明光束应对准汽车的前进方向,主光轴方向应该偏下。前照灯的发光强度不足或者照射方向不合适,汽车前方的情况就不能清晰易见,或者给迎面驶来的汽车里的驾驶员造成眩目,妨碍视野,这些都是导致事故的重要因素。在
系统辨识与自适应控制硕士研究生必修课程考核
《系统辨识与自适应控制》硕士研究生必修课程考核(检测技术与自动化装置专业)2003.5. 22 可下载自https://www.360docs.net/doc/09218134.html,/xuan/leader/mrj/ 学生姓名:考核成绩: 一、笔试部分 (占课程成绩的 80% ) 考试形式:笔试开卷 答卷要求:笔答,可以参阅书籍,要求简明扼要,不得大段抄教材,不得相互抄袭 试题: 1 简述系统辨识的基本概念(概念、定义和主要步骤)(10分) 2 简述相关辨识的基本原理和基于二进制伪随机序列的相关辩识方法(原理、 框图、特点)。(10分) 3 简述离散线性动态(SI / SO)过程参数估计最小二乘方法(LS法)的主要 内容和优缺点。带遗忘因子递推最小二乘估计(RLS法)的计算步骤和主要递推算式的物理意义(10分) 4 简述什么是时间序列?时间序列建模如何消除恒定趋势、线性趋势和季节性 的影响?(10分) 5 何谓闭环系统的可辨识性问题,它有那些主要结论?(10分) 6 何谓时间离散动态分数时滞过程?“分数时滞”对过程模型的零点和极点有 什么影响?(10分) 7 简述什么是自适应控制,什么是模型参考自适应控制(MRAC)?,试举一例说明MRAC的设计方法(10分)。 8 请设计以下过程( yr = 0 ) y(k) -1.6y(k-1)+0.8y(k-2) = u(k-2)- 0.5u(k-3)+ε(k)+1.5ε(k-1)+0.9ε(k-2) 的最小方差控制器(MVC)和广义最小方差控制器(GMVC), 并分析他们的主要性能。(10分) 二、上机报告RLS仿真(占课程成绩的 20%) 交卷时间:6月9日下午
汽车-自适应前照灯系统技术规范
零部件子系统技术规范自适应前照灯系统 2020年07月05日
1前言 本文件是根据项目规划,定义了自适应前照灯系统基本技术要求,用于供应商报价,本文件在供应商定点之前可持续进行更改。 本文件内的信息要求严格保密,未征得同意不得将信息透露给第三方。2术语及参考文件 2.1术语 2.2参考规范 3设计概念 1) CAN BUS通讯满足《BCZQQ0003》,LIN BUS通讯满足《BCZQQ0004》,网络管理满足《BCZQQ0006》; 2)诊断功能开发符合《BCZQQ0005》,软件刷写满足《BCZQQ0007》; 3) AFS系统包含Master控制器、左右Slave控制器和前后车身高度传感器,Master控制器负责系统控制策略、传感器信号采集处理、CAN网络通信和LIN主控节点等;Slave控制器负责通过LIN总线接收Master控制器的指令,驱动垂直调光步进电机和随动转向步进电机,满足自适应照度的需求。
3.1效果图 -- 3.2功能清单 4技术要求 4.1工作温度要求 Master控制器: 工作温度: -40oC ~ +80oC 存储温度:-40oC ~ +90oC 左右Slave控制器: 工作温度: -40oC ~ +105oC 存储温度:-40oC ~ +115oC 前后车身高度传感器: 工作温度: -40oC ~ +105oC 存储温度:-40oC ~ +115oC 4.2电器环境要求 工作电压范围:9V~16V 测试电压: 14 V 标称电压: 12 V CAN网络通讯电压: 6V~16V LIN网络通讯电压:6V~16V 4.3材料要求 满足ELV报废车辆指令要求 4.4气味性要求 气味性满足《内饰散发特性评价准则》
自适应巡航控制系统技术解析 Adaptive cruise control system
自适应巡航控制系统Adaptive cruise control system High speed, keep a good distance is an important guarantee to driving safety when driving high speed with the vehicle in front. Only in this way, can occur before the car in an emergency braking situation, set aside enough braking distance. By using this technique, when cruise driving, the driver only needs to do is to turn the steering wheel can be. Adaptive cruise control system is an automatic control system for intelligent, it is evolved based on cruise control technology already exist on the. In the process of vehicle mounted sensor distance in front of the vehicle, the vehicle (radar) continued to scan the road ahead of the vehicle, the wheel speed sensor signal acquisition the speed at the same time. When the distance between the vehicle between after hours, the ACC control unit can be through with anti lock braking system, engine control system of coordinated action, make the appropriate wheel brake, and the output power of the engine down, to make the vehicle and the vehicle in front always keep a safe distance. Adaptive cruise control system in the control of vehicle braking, usually the braking deceleration limit in does not affect the comfortable degree, when the need for greater
系统辨识与自适应控制论文
XXXXXXXXXX 系统辨识与自适应控制课程论文 题目:自适应控制综述与应用 课程名称:系统辨识与自适应控制 院系:自动化学院 专业:自动化 班级:自动化102 姓名: XXXXXX 学号: XXXXXXXXX 课程论文成绩: 任课教师: XXXXX 2013年 11 月 15 日
自适应控制综述与应用 一.前言 对于系统辨识与自适应控制这门课,前部分主要讲了系统辨识的经典方法(阶跃响应法、频率响应法、相关分析法)与现代方法(最小二乘法、随机逼近法、极大似然法、预报误差法)。对于系统辨识,简单的说就是数学建模,建立黑箱系统的输入输出关系;而其主要分为结构辨识(n)与参数辨识(a、b)这两个任务。 由于在课上刘老师对系统辨识部分讲的比较详细,在此不再赘述,下面讨论自适应控制部分的相关内容。 对于自适应控制的概念,我觉得具备以下特点的控制系统,可以称为自适应控制系统: 1、在线进行系统结构和参数辨识或系统性能指标的度量,以便得到系统当前状态的改变情况。 2、按一定的规律确定当前的控制策略。 3、在线修改控制器的参数或可调系统的输入信号。 二.自适应控制综述 1.常规控制系统与自适应控制系统比较 (1)控制器结构不同 在传统的控制理论与控制工程中,常规控制系统的结构主要由控制器、控制对象以及反馈控制回路组成。 而自适应控制系统主要由控制器、控制对象、自适应器及反馈控制回路和自适应控制回路组成。 (2)适用的对象与条件不同 传统的控制理论与控制工程中,当对象是线性定常、并且完全已知的时候,才能进行分析和控制器设计。无论采用频域方法,还是状态空间方法,对象一定是已知的。这类方法称为基于完全模型的方法。在模型能够精确地描述实际对象时,基于完全模型的控制方法可以进行各种分析、综合,并得到可靠、精确和满意的控制效果。 然而,有一些实际被控系统的数学模型是很难事先通过机理建模或离线系统辨识来确知的,或者它们的数学模型的某些参数或结构是处于变化之中的.对于这类事先难以确定数学模型的系统,通过事先整定好控制器参数的常规控制往往难以对付。 面对上述系统特性未知或经常处于变化之中而无法完全事先确定的情况,如何设计一个满意的控制系统,使得能主动适应这些特性未知或变化的情况,这就 是自适应控制所要研究解决的问题.自适应控制的基本思想是:在控制系统的运行过程中,系统本身不断地测量被控系统的状态、性能和参数,从而“认识”或“掌握”系统当前的运行指标并与期望的指标相比较,进而作出决策,来改变控制器的结构、参数或根据自适应规律来改变控制作用,以保证系统运行在某种意义下的最优或次优状态。按这种思想建立起来的控制系统就称为自适应控制系统。
汽车自适应前照灯系统的设计毕业论文
汽车自适应前照灯系统的设计毕业论文 目录 第1章绪论 (1) §1.1 课题背景 (1) §1.2 国外发展现状及发展趋势 (3) §1.3本课题的研究意义与主要容 (5) 第2章系统整体方案设计 (6) §2.1 系统的功能及构成 (6) §2.2 系统基本功能 (8) §2.3 系统的工作原理 (8) §2.3.1 随动转弯角度 (9) §2.3.2 车身纵倾调光 (10) §2.4本章小结 (10) 第3章系统硬件设计 (11) §3.1 AFS主控制器设计 (11) §3.1.1 微控制芯片的选型 (11) §3.1.2 信号处理电路设计 (13) §3.1.3 电源电路设计 (15) §3.1.4 电机控制电路设计 (15) §3.2 执行器选择 (17) §3.3 传感器模块选择 (17) §3.4本章小结 (19) 第4章系统软件设计 (20) §4.1程序思路 (20) §4.2系统分块程序设计 (21)
§4.2.1 随动转弯程序 (22) §4.2.2 倾角转动程序 (23) §4.3 本章小结 (24) 第5章系统调试 (25) §5.1 系统硬件调试 (25) §5.1.1 常见的硬件故障 (25) §5.1.2 硬件调试方法 (25) §5.2 系统软件调试 (26) §5.3 基于PROE的运动建模 (27) §5.4 本章小结 (28) 结论 (29) 参考文献 (30) 致谢 (31) 附录 (32) 附录1原理图 (32) 附录2 PCB (33) 附录3 实物图 (34) 附录4程序代码 (35)
第1章绪论 §1.1 课题背景 自19世纪汽车诞生以来,已经历了一个多世纪的风雨。想当初,卡尔.本茨造出的三轮汽车每小时的时速仅为18公里/时,而现在已经诞生了时速600公里的超级跑车。随着社会的不断进步发展,汽车已成为现代人生活中不可或缺的交通工具。然而,随着汽车技术的不断进步以及车辆数目的增加,汽车也给现代社会带来了新的问题。频繁发生的交通事故已经成为不得不严肃对待的世界性问题。据统计,在各种意外事故中,以车祸占首位,占意外死亡总数的50%以上。仅以汽车交通事故为例,全世界因交通事故而死亡的人数已超过3000万人,比世界大战所死亡的人数还多。而其中以青少年与老年人的死亡率最高。 值得注意的是:儿童青少年一直都是交通事故导致伤亡的高危人群。据估计,近年来全世界每年在车祸中丧生的人数约为30万人,受伤者约3000万人,其中终身残疾者约为300万人。我国城市每万辆车死亡率为50—10.8人左右,与国外相比较,为日本的26.5倍、美国的17.8倍。若以万辆车的死亡率作比较,我国车祸的发生率和死亡率皆居世界之首位。据公安部交通管理局的统计:2005年,全国共发生道路交通事故450254起,造成98738人死亡、469911人受伤,直接财产损失18.8亿元。自2001年以来全国交通事故死亡人数首次回落到10万人以下。中国由于交通事故每年死亡超过10万人,死者大多是年轻人,占全球交通事故死亡人数的五分之一,居世界各国之首。中国每5分钟有一人因车祸死亡,每一分钟有一人因车祸伤残,每天死亡280多人,每年死亡10万多人,中国的汽车数量仅占世界的1.9%,而车祸死亡人数占世界15%,且每年增加4.5%。如何提高汽车的安全性、减少交通事故的发生已经成为全世界的迫切要求。汽车安全性分为三大部分:主动安全性、被动安全性和防火安全性。所谓主动安全性,是指汽车设计者在汽车的配置中,采取一系列技术措施,以预防和减少安全事故的发生。其中包括汽车夜间照
自适应巡航控制系统
自适应巡航控制系统(ACC) 自适应巡航控制系统传感器安装总图→相关章节。 关于自适应巡航控制系统的一般说明→相关章节 用ACC 校准设备-VAS 6190-进行校准的流程,见→相关章节。用ACC 校准设备-VAS 6430-进行校准的流程,见→相关章节。拆卸与安装ACC 传感器→相关章节。 自适应巡航控制系统传感器装配一览图 1 - 传感器 ?拆卸与安装→相关章节 2 - 定位点 ?用于直立销 3 - 插销 提示
支架中的立销就是预调好的。不允许改变其设定。 4 - 支架 5 - 插头 ?松开时挤压两个卡箍,如-箭头-所示。 ACC 概述 间距调节传感器与间距调节控制器-J428-安装在一个壳体内。传感器或控制器损坏时,必须整体更换。 以下描述时,传感器及控制器称为传感器。 传感器的雷达盖板位于前保险杠盖板后面,并由可通过雷达波的材料制成。所有改变,如后来的喷漆、粘贴的标签等都可能导致功能故障。 传感器受到污染时也可导致功障碍。为此请按照维修手册拆下传感器前的装饰格栅或散热器格栅,并清洁装饰格栅或散热器格栅的内侧与传感器。 在进行自适应巡航系统调节前,首先必须查询故障记忆并排除故障。 在ACC 控制单元的测量值块2中可识别,传感器就是否仅略微移动,不超过0、5°的失调角不需要重新调校。 自适应巡航系统调校必须使用经大众/ 奥迪许可的四轮定位仪与调校装置进行! 正确调校就是保证ACC 功能完好的前提。 提示 ?以下情况需要重新正确调校: ?已调整过后桥前束。 ?已更换整个雷达传感器。 ?保险杠横梁已松开过或移动过。 ?前端上有损坏。 ?失调角大于0、5°。 用ACC 调校装置-VAS 6190-
系统辨识及自适应控制实验..
Harbin Institute of Technology 系统辨识与自适应控制 实验报告 题目:渐消记忆最小二乘法、MIT方案 与卫星振动抑制仿真实验 专业:控制科学与工程 姓名: 学号: 15S004001 指导老师: 日期: 2015.12.06 哈尔滨工业大学 2015年11月
本实验第一部分是辨识部分,仿真了渐消记忆递推最小二乘辨识法,研究了这种方法对减缓数据饱和作用现象的作用; 第二部分是自适应控制部分,对MIT 方案模型参考自适应系统作出了仿真,分别探究了改变系统增益、自适应参数的输出,并研究了输入信号对该系统稳定性的影响; 第三部分探究自适应控制的实际应用情况,来自我本科毕设的课题,我从自适应控制角度重新考虑了这一问题并相应节选了一段实验。针对挠性卫星姿态变化前后导致参数改变的特点,探究了用模糊自适应理论中的模糊PID 法对这种变参数系统挠性振动抑制效果,并与传统PID 法比较仿真。 一、系统辨识 1. 最小二乘法的引出 在系统辨识中用得最广泛的估计方法是最小二乘法(LS)。设单输入-单输出线性定长系统的差分方程为: ()()()()()101123n n x k a x k a k n b u k b u x k n k +-+?+-=+?+-=,,,, (1.1) 错误!未找到引用源。 式中:()u k 错误!未找到引用源。为控制量;错误!未找到引用源。为理论上的输出值。错误!未找到引用源。只有通过观测才能得到,在观测过程中往往附加有随机干扰。错误!未找到引用源。的观测值错误!未找到引用源。可表示为: 错误!未找到引用源。 (1.2) 式中:()n k 为随机干扰。由式(1.2)得 错误!未找到引用源。 ()()()x k y k n k =- (1.3) 将式(1.3)带入式(1.1)得 ()()()()()()()101111()n n n i i y k a y k a y k n b u k b u k b u k n n k a k i n =+-+?+-=+-+?+ -++-∑ (1.4) 我们可能不知道()n k 错误!未找到引用源。的统计特性,在这种情况下,往往把()n k 看做均值为0的白噪声。 设 错误!未找到引用源。 (1.5)
自适应前照灯系统(AFS)应用及发展趋势
本科课程设计论文 题目:自适应前照灯系统(AFS)应用及发展趋势 学院: 汽车与交通工程学院 专业: XXXXXXXX 学号: 2009XXXXXXX 学生姓名: X X X 指导教师: X X X 日期: XXXX年X月
摘要:分析前照灯照明中存在的问题,随动自适应前照灯的作用及其国内外发展概况;简述氙气前照灯AFS的组成及原理。分析AFS的6种不同的照明模式:默认照明模式、高速公路照明模式、乡村照明模式、城市照明模式、弯道照明模式和阴雨天照明模式;通过对AFS的理论阐述和实践分析,为国内在AFS技术上的进一步发展探索提供参考。 关键字:随动转向;氙气灯;高智能 1 引言 汽车前照灯是汽车最重要的安全部件之一,前照灯的照射范围和亮度对行车安全又直接影响。根据国外统计显示,虽然夜间的车流量不到白天流量的五分之一,但夜间发生的交通事故,却超过交通事故总数的四分之一,而其中在弯道行车造成的交通事故,更是占了夜间交通事故的百分之八十以上[1]。 人们开始研究汽车自适应前照灯系统(Adaptive Front—light System,AFS)。汽车自适应前照灯系统是使会车用前照灯(即近光灯)的光照射线随车辆行进方向作水平方向偏转,并根据车辆的俯仰作垂直方向的调整,为驾驶员在路口、弯道及颠簸不平的路面提供最佳的照明效果,从而提高夜间行车的安全性。在国外,AFS系统已经开始得到广泛应用,然而由于进口的AFS系统大多为生厂商本国道路考虑,而且国内道路状况与国外差别较大,另外,进口的AFS系统价格也非常高,因此进口AFS系统在国内的普及应用存在的阻力较大[2] 2 AFS的实现 为实现AFS的功能,需要对AFS的光源部分和控制部分分别进行研究。 2.1 自适应氙气前照灯 为了满足自适应前照灯系统的灯光强度和构造需求,现在大部分上的是在氙气前照灯的基础的自适应前照灯系统。 HID具体发光原理是:在石英管内。以多种化学气体充填。其中大部份为氙气与碘化物等惰性气体。然后再通过镇流器将车上12 V的直流电压瞬间增压至23000V。经过高压震幅激发石英管内的氙气电子游离,在两电极之间产生光源,这就是所谓的气体放电。氙气被击穿,产生的超强白色电弧光,可提高光线色温值,接近正午日光的颜色.人眼的接受度及舒适度很高。 但是由于气体放电的种种特性,主要体现为:低压直流供电;快速瞬间启动及热灯启动;过渡阶段的功率递减以实现在1—2s内达到额定光输出的75%~