南航自控820_2011年硕士研究生入学考试试题及参考答案
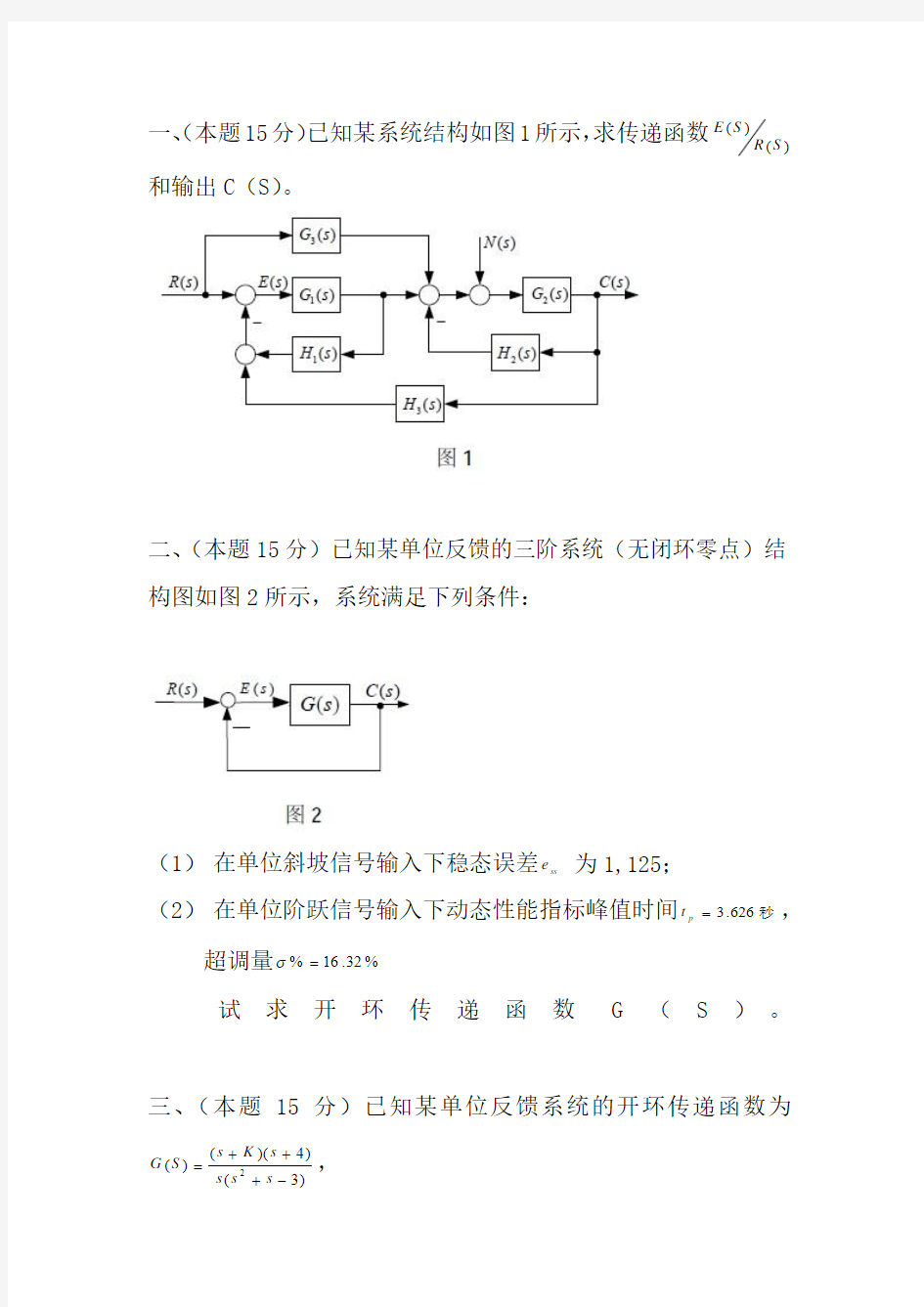
一、(本题15分)已知某系统结构如图1所示,求传递函数)()(S R S E 和输出C (S )。
二、(本题15分)已知某单位反馈的三阶系统(无闭环零点)结构图如图2所示,系统满足下列条件:
(1) 在单位斜坡信号输入下稳态误差ss
e 为1,125;
(2) 在单位阶跃信号输入下动态性能指标峰值时间秒
626.3=p
t
,
超调量%
32.16%=σ 试求
开环
传
递
函
数
G
(
S
)。
三、(本题15分)已知某单位反馈系统的开环传递函数为
)
3()4)(()(2
-+++=
s s s s K s S G ,
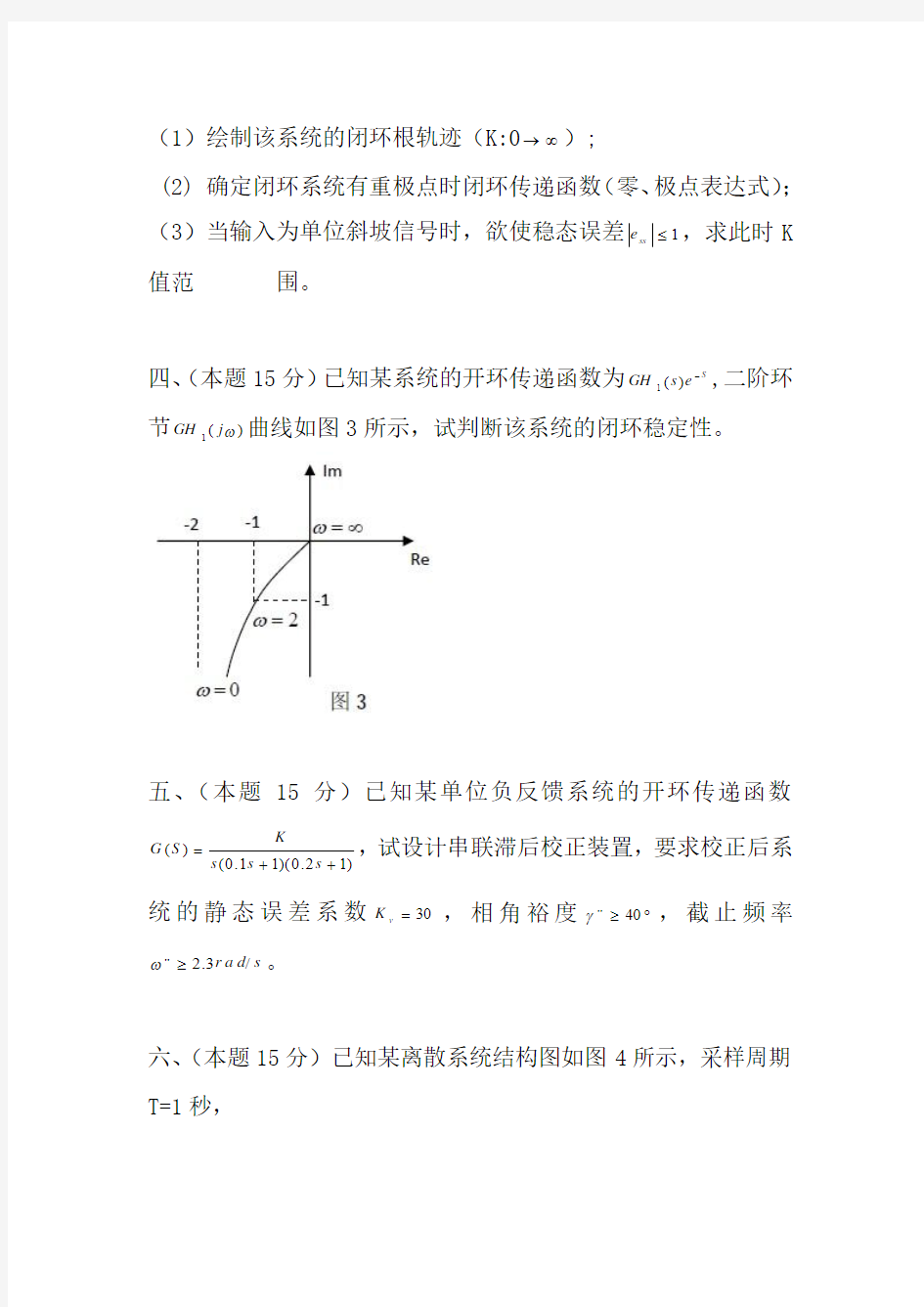
(1)绘制该系统的闭环根轨迹(K:0∞→);
(2) 确定闭环系统有重极点时闭环传递函数(零、极点表达式); (3)当输入为单位斜坡信号时,欲使稳态误差1≤ss e ,求此时K
值范 围。
四、(本题15分)已知某系统的开环传递函数为S
e
s GH -)(1
,二阶环
节)(1
ωj GH
曲线如图3所示,试判断该系统的闭环稳定性。
五、(本题15分)已知某单位负反馈系统的开环传递函数
)
12.0)(11.0()(++=
s s s K
S G ,试设计串联滞后校正装置,要求校正后系
统的静态误差系数
30
=v K ,相角裕度
?
≥40,
,γ
,截止频率
s
r a d /3.2,
,≥ω。
六、(本题15分)已知某离散系统结构图如图4所示,采样周期T=1秒,
(1) 当1)(=s G h
时,求闭环系统稳定的K 值范围;
(2) 当s
e
s G
Ts
h
--=1)(,K=1,s
s R 1)(=时,试求该离散系统的输出
相应)
(*
t c
、稳态输出)
(*
∞c
和稳态误差)(*
∞e
。
附Z 变换表:aT
e
z z
s Z --=
+]1
1[;2
2)
1(1
-=????
??
z Tz s Z ;1
1-=
??
?
???
z z s Z 。
七、(本题15分)已知非线性系统的结构图如图5所示,图中非线性环节的描述函数
5
.041)(++=
A A A N ,线性部分的传递函数
10
)2()(2
++=
s s k s G ,
(1) 当k=5时,试用描述函数分析系统是否存在自激振荡?若
存在,求出自激振荡振幅和频率; (2) 当k=1时,分析该非线性系统的稳定性。
八、(本题10分)已知系统的传递函数为1
210)(2
+++=as s s s G (a 为实
数)
(1)试列写该系统的可控标准型实现;
(2)在(1)的基础上,试用利亚普诺夫第二法判断该系统的稳定性。
九、(本题15
分)已知系统的动态方程为[]x
y u x x 01
1101
10
=???
???+??????-=
(1)判断系统的可控性和可观性;
(2)试设计状态反馈控制器,使系统的闭环极点位于2
32
1j ±
-处;
(3)试求加入状态反馈后的闭环系统传递函数。
十、问答题(本题共20分,每小题4分) (1)若单位负反馈系统的开环传递函数为)
18()1()1()(2*
+-+=
S s s K s G ,请
问该系统的闭环根轨迹图中可能存在复数分离点吗?请说明理由。
(2)某负反馈最小相位系统的开环增益为5,其幅值裕度为20
分贝,则保证闭环系统稳定的最大开环增益为多少? (3)频率响应法设计校正环节时,若校正前系统相角裕度
?-=25,
γ,校正后的相角裕度?=45,
,γ
,则采用串联超前校正
还是采用串联滞后校正比较合适?请说明理由。
(4)已知系统的状态方程为x x
??
?
???--=32
10 ,初始状态??
????=
10)0(x ,
试求该状态方程的解x(t)。
(5)线性定常系统经过状态空间的线性变换后特征值改变吗?
试证明之。 参考答案: 一、(本题15分) (1))
()()()()()()()()()()(1)
()()()()(1)
()(2211321221132322s H s G s H s G s H s G s G s H s G s H s G s H s G s G S H s G s R s E ++++-+=
(2)[][])
()()()()()()()()()()(1)
()()()()()()()()()()()()()()(2211321221111221123232
1
s H s G s H s G s H s G s G s H s G s H s G s N s H s G s G s G s R s H s G s G s G s G s G s G s G s C ++++++++=
二、(本题15分)
令系统的闭环传递函数为
K
bs as
s K
s +++=
2
3
)(φ,则
)
()(2
b as s s K s G ++=
,
125
.11===
K
b Kv
e ss 。
由5
.0%.32.16%100*%;866.0,626.32
1======
--
ξσωωπξ
πξ得得e
t
d d
p
。
由1,866.012
==-=n n d
ωξ
ωω
得。
故主导极点866.05.02,1j j s d n ±-=±-=ωξω。
又因为)
)(866.05.0)(866.05.0(2
3
c s j s j s K bs as
s +-+++=+++ 即 ))(1(2
2
3
c s s s K bs as
s
+++=+++,得,
8,9,9,8====c b a K
所以)
99(8)(2
++=s s s s G 。
(1)特征方程为1+G (s )=0 即 0
)
3()
4)((12
=-++++s s s s K s ;等效开环传
递函数
2
)
1()4()(++=
s s s K s G ;分离点
4
11
21+=
++
d d d
,
)(646.5,354.021舍去-=-=d d ;
根轨迹与虚轴交点2
,1==ωK
;根轨迹图如下。
(2)闭环出现重极点时K=0.04;开环传递函数
)
3()
4(04.0)(2
-+++=s s s s s s G )(;闭环传递函数为
)
292.1()354.0()4)(04.0()(2
++++=
s s s s s φ;
(3)
)
133()
14)(1(3
4)
3()4)(()(2
2
+--++-=
-+++=
s
s
s s K s
K s s s s k s s G ;K
K
e
ss
433
41-
=-=
,
由 1
43≤=
K
e ss
,得4
3≥K ;考虑到稳定性,最后得1
4
3<≤K
。
?
-=+∠
=?=∠=+=
=451
12135-2;)
1(2
1
1
1
j s Ts GH
GH
Ts s K GH
;则,时,当ω,
,
)
(令
125.014
;4,22
2)
(12;5.02
12
2
2
1=+===
+=
==
=ωωωωK K T K GH
T 得?-=?-?-=∠=-=1225.225.090;5.21
5.21
tg j GH c
ωωω)(此时,若?-=-58c τω
本系统处于临界稳定状态,即s
e
s GH τ-)(1
恰好其幅相曲线过(-1,
j0)点,故4.00<≤τ
时系统稳定。本题1=τ,系统不稳定。
五、(本题15分) (1)
)
12.0)(11.0(30
)(++=
s s s s G ,校正前的指标:
?
-==25,/4.11,
,
γωs rad c ;
采用滞后校正TS
bTS s G
C
++=
11)(;
(2)校正后的相角裕度设计
)
()(180,
,,,,
,c c c j G ωω?γ
∠++?= 取
?-=5)(,
,c c ω?;
?-=?--?-?=-?-=∠135)5(18040)(180)(,,'
',,c c c j G ω?γ
ω;
?-=--?-=∠1352.01.090)(,
,,
,,
,c c c arctg arctg j G ωωω,则s rad c /8.2,
,=ω
满足要求; (3)0
)
12.0)(11.0(30
11lg 208
.2=++?
++=j s s s s Ts
bTs ,;
1.0,lg 2011lg 208
.2==++=b b Ts
bTs
j s 则
(4)
;
7.35,10,10
11
,
,,
,==
=
T b T bT
c
c ω
ω则
s
s s G 7.35157.31)(++=
,经验算
?==40,/8.2,
,,
,γ
ωs rad c ,满足要求。
六、(本题15分) (1) 0 )(,1)(;)4(4.1)3(4.1)2()1(368.0)(* ** =∞=∞+-+-+-+-=e c t t t t t h δδδδ。 七(本题15分) (1) 当k=5时,10 )2(5 )(2 ++= jw j j G ωω。与负实轴交点处2 =x ω , 833 .0)(-=x j G ω;与负虚轴的交点处108 .2)(,581.1j j G -==ωω 。负 倒 描 述 函 数为 4 ) (1,;5.0) (10,1 5.04) (1-=- ∞→-=- =++- =- A N A A N A A A A N 时当时,当; 绘出)() (1ωj G A N 和- 曲线如下图所示: 由自振条件1)()(-=A N j G ω得自振角频率s rad /2=ω ,得自振 振幅A=0.105。 (2) 当k=1时,10 )2(1 )(2 ++= jw j j G ωω。由2 1)(2 < =x x j G ωω 得系统稳 定。 八、(本题10分) (1)[]x y u x a x 110 1021 10 =??? ???+??????--= (2)2 2 2 1)(,0x x x V x e +==令,2 22211 422)(ax x x x x x V -=+= , 讨论: 当a>0时,系统渐进稳定; 当a=0时,系统李氏意义下稳定; 当a<0时,系统不稳定。 九、(本题15分) (1) []可观可控;,2)(,10 01,2)(,11 11 =?? ? ???=??????==???? ??-==o o c c S rank cA c S S rank Ab b S ; (2)令[]21 k k k =,21212 1)()()(k k k k bk A I f -++++=--=λλλλ, ?? ? ? ??==++=2121),(*)(,1)(2 *k f f f 得令λλλλλ; (3)bk A A s s s b A sI c s G -=+++= -=-其中,1 1)()(2 1 。 十、问答题(本题共20分,每小题4分) (1) 分离点为根轨迹上的点,根轨迹关于实轴对称,若存在复 数分离点一定为共轭复数,系统一定为4阶以上,该系统为3阶系统,所以不存在复数分离点。 (2) 最大开环增益为50。 (3) 因为相角裕度需要提高?70,超前校正无法提供较大的角 度,选择串联滞后校正比较合适。 (4) [] ?? ????+-+---=-=----------t t t t t t t t e e e e e e e e A sI L t 22221 1 2222) ()(φ, ? ? ? ???+--==----t t t t e e e e x t t x 222)0()()(?。 (5) 设原系统动态方程为 Cx t y Bu Ax t x =+=)()( ,令x P x =,新系统动态 方程为 x CP t y Bu P x AP P t x =+=--)()(11 则A I P A I P AP P I A I -=-=-=---λλλλ1 1 。 1.PLC处于正常运行时,不断地重复扫描过程。其扫描过程分为开关状态、逻辑运算和输出运算三个阶段。2.PLC的三种输出方式是:继电器、晶体管、双向晶闸管。 3.三相异步电动机调速依据是n=(1-s)60f1/p,调速方法有改变电源频率f、改变转差率s、改变磁极对数P 。 4.通电延时间继电器的线圈和触点符号分别是:(第6个), KT 。 5.低压断路器具有过载、短路、失压保护功能。 6.三相异步电动机调速的方法有变极调速、变差调速和变频调速。 8.?三相异步电动机常用制动方法有反接制动、能耗制动以及再生制动。 9.PLC由中央处理器(CPU)、存储器、输入/输出接口、外部设备编程器及电源模块组成。 10.FX2N系列PLC编程元件有X输入继电器、Y输出继电器、M中间继电器、T定时器、S状态元件(步进继电器)、D数据寄存器和BFM 缓冲寄存器等七大类。 —△减压起动;延边三角形减压起动。 14.三相异步电动机常用的电气制动方法有:反接制动控制、能耗制动控制。 15.改变直流电动机的旋转方向原理是改变电枢或激磁绕组的极性。 16.改变三相异步电动机的旋转方向原理是改变三相电源的相序。 17.断电延时时间继电器的线圈和触点的符号分别为(第7个);KT 18.?电气控制线路设计方法有经验设计法和逻辑设计法两种。 19.指出如下符号代表哪种电气元器件: FU SQ KM KA KT 熔断器、行程开关、接触器、继电器、时间继电器。 1、自动空气开关电磁脱扣器的保护作用是(B)。 A.过载保护 B. 短路保护 C. 失压保护 2.有专用变压器的场合,设PN 是直接起动额定功率,SN是变压器额定功率(容量),则电动机采用直接起动的条件是(A)。 A. PN ≤ (10~20)%SN B. PN ≤ (20~30)% SN C. PN ≤ (30~40)% SN 3.控制电动机反接制动的电器应是(C)。 A.电流继电器 B. 时间继电器 C. 速度继电器 4、按下复合按钮或接触器线圈通电时,其触点动作顺序是(C)。 A.常闭触点先断开 B. 常开触点先闭合 C. 两者同时动作 5、X62W万能铣床主轴采用变速冲动的目的是(A)。 A.便于齿轮啮合 B. 减小惯性 C. 减小起动电流 证券投资(选修)结课报告 南方航空中长期投资价值分析 学院(系):经济管理学院 年级专业: 13级工商管理 学号: 学生姓名:李晓文 授课教师:王 完成日期: 2016/05/06 一.公司概况、主营业务 1)、整体概况 中国南方股份有限公司是由中国南方航空集团公司发起设立,注册资本800356.70万元。以原中国南方航空公司为基础联合中国北方航空公司和新疆航空公司重组而成的航空运输主业公司。是由中国南方航空集团公司发起设立并控股的航空公司。中国南方航空股份有限公司与中国国际航空股份有限公司和中国东方航空股份有限公司合成中国三大航空集团。 中国南方航空股份有限公司,是中国南方航空集团公司属下航空运输主业公司,总部设在广州。中国南方股份有限公司是中国运输飞机最多、航线网络最发达、年客运量最大的航空公司。机机队规模跃居世界第六。以广州、北京为中心枢纽,密集覆盖国内150多个通航点,全面辐射亚洲40多个通航点。连接欧美澳非洲的发达航线660多条,每天有将近2000个航班穿梭于世界各地。在新加坡、东京、首尔、巴黎、洛杉矶、悉尼、纽约、伦敦、温哥华、迪拜等地设有53个国外办事处。航线网络通达全球884个目的地。 2)、营业范围 南方航主要提供国内、地区和国际定期及不定期航空客、货、邮、行李运输服务;提供通用航空服务;提供航空器维修服务;经营国内外航空公司的代理业务;提供航空配餐服务;提供酒店经营;飞机租赁和航空意外保险销售代理;及进行其他航空业务及相关业务,包括为该等业务进行广告宣传。 3)、发展历程 中国南方航空股份有限公司发展迅速。于1997年在纽约(NYSE:ZNH)和香港(港交所:1055)同步上市发行股票,2003年在上海证券交易所成功上市(上交所:600029)。先后联合重组、控股参股多家国内航空公司。在国内率先引进波音737、757、空客A330、空客A380等先进客机;首家推出计算机订座、电子客票等业务;引进开发了收益管理系统、运行控制系统、财务管理系统、人力资源系统、货运系统、办公自动化系统等广泛覆盖各流程的信息系统,信息化优势明显;建有国内第一、全球第三的超级货站,以及国内最大的航空配餐中心等设施。2007年,南航旅客运输量近5700万人次,位列世界第四、亚洲第一,是亚洲唯一一个进入世界航空客运前五强的中国航空公司;南航客运量已连续29年居国内各航空公司之首, 也是连续第3年国内唯一一家进入世界民航客运前十强的航空公司。 中国南方航空股份有限公司坚持“安全第一”的核心价值观,安全基础坚实。飞行实力出众,拥有3300多名优秀的飞行人员,是目前国内唯一一家拥有独立培养飞行员能力的航空公司,与全球知名飞行模拟器制造商CAE合资建立的飞行训练中心是亚洲规模最大的飞行训练中心;机务维修实力雄厚,旗下广州飞机维修工程有限公司(GAMECO)建有亚洲最大的飞机维修机库,南航与德国MTU公司合建有国内最大、维修等级最高的航空发动机维修基地;保障体系 1 MATRIX.ACH .system example; .segment /ram /begin=0x0008 /end=0x000f /pm pm_rsti; .segment /ram /begin=0x0100 /end=0x07ff /pm pm_code; .segment /ram /begin=0x0800 /end=0x0fff /pm pm_data; .segment /ram /begin=0x0000 /end=0x07ff /dm dm_data; .bank/pm0/wtstates=0/wtmode=internal/begin=0x000000; .bank/pm1/wtstates=0/wtmode=internal/begin=0x008000; .bank/dm0/wtstates=0/wtmode=internal/begin=0x00000000; .bank/dm1/wtstates=0/wtmode=internal/begin=0x20000000; .bank/dm2/wtstates=1/wtmode=internal/begin=0x40000000; .bank/dm3/wtstates=0/wtmode=internal/begin=0x80000000; .endsys; Mat1.dat 1 2 3 4 5 6 7 8 9Mat2.dat 1 2 3 4 5 6 7 8 9 MATRIX.ASM #define N 4 #define M 4*4 .SEGMENT/DM dm_data;{ Declare ariables in data memory } .VAR input[M]= "mat1.dat"; .VAR out[M]; .ENDSEG; .SEGMENT/PM pm_data;{ Declare ariables in program memory } .VAR input1[M]= "mat2.dat"; .ENDSEG; 一、填空题 1.影响人机系统的因素有人、环境、机。 2.研究人机系统中人的各种特性是人机工程学的主要研究围和容之一,而人机系统中人的特性是指人的 生理特性和心理特性。 3.最早建立的人机学学术团体是英国人机工程学会,成立于1950年。美国是提供人机学 研究成果、数据资料最多的国家。 4.若男性身高的第5百分位数为158.3cm,则有 5 %男性身高大于158.3cm。 5.若女性身高的第95百分位数为165.9cm,则有95 %女性身高小于等于165.9cm。 6.人体尺寸测量时,被测者的立姿应使两足大致呈__45 °__夹角,体重均匀分布于两足。 7.人体尺寸测量时,被测者的坐姿膝应使左、右大腿大致平行,膝弯曲大致成直角,足平放在地面 上,手轻放在大腿上。 8.人体测量基准面的定位是由 3 个互为垂直的轴来决定的。 9.测量基准面中,通过铅垂轴和纵轴的平面及与其平行的所有平面都称为矢状面。 10.测量基准面中,通过铅垂轴和横轴的平面及与其平行的所有平面都称为冠状面。 11.通过左、右耳屏点及右眼眶下点的水平面称为眼耳平行。 12.___动态人体尺寸____是在人体从事某种活动的情况下,对运动着的人体进行测量。(课本P46) 13.人体测量的数据常以百分位数来表示人体尺寸等级,其中第5百分位数是代表_ 小__身材,是指有 __95%_的人群身材尺寸大于此值。(课本P30) 14.考虑有关人体尺寸时,必须给衣服、鞋、帽留下适应的余量,也要考虑人有高、矮、胖、瘦之分,因 此,应用人体尺寸数据时要引进__尺寸修正量__。(课本P39) 15.在人体左、右方向上,将靠近正中矢状面的方向称为侧,将远离正中矢状面的方向称为外 侧。 16.在四肢上,将靠近四肢附着部位的称为近位,将远离四肢附着部位的称为远位。 17.人的行为习性有:__抄近路习性_、__识途性___、_左侧通行习性__、_左转弯习性___从众习性____、 ____、___ 聚集习性______和人的距离保持。 18.基本测量姿势有直立姿态和正直姿态。(课本P27) 19.心理学研究的方法分为两大类,分别是实验法和非实验法。(课本P257) 20.个人的空间距离分为四个等级,分别是亲密距离、个人距离、社交距离和公 共距离。(课本P252) 21.心理现象总体可以分为两个形成过程:认识过程过程和情感、意志过程。(课本P250) 22.办公用椅比较复杂,需要合适人体的两种姿势直立坐姿和放松坐姿。 二、选择题 1.下列(3 )不符合人机功能合理分配的原则。 ①快速的、持久的、可靠性高的由机器来做 ②研究、创造、决策由人来做 ③单调的、高阶运算的、操作复杂的由人来做 ④笨重的、快速的、持久的由机器来做 2.人机工程学的发展大致经历了这样的一个过程,即__C__ A.以人类为中心—以机械为中心—人机系统环境协调-以系统为中心 B.以机械为中心一以系统为中心一以人类为中心-人机系统环境协调 C.以机械为中心一以人类为中心一以系统为中心一人机系统环境协调 D.以人类为中心一以系统为中心一人机系统环境协调-以机械为中心 3. 人体测量的数据常以百分位数来表示人体尺寸等级,最常用的是以第5%、第(①)%、第95%三种百分位数来表示。 ①50. ②60; ③70; ④55PLC复习题答案
2019-2020年南方航空投资价值分析作业.doc
南航的DSP课件与周建江老师的matad21020
人机复习题(附答案)
2016矩阵论试题