赵宇凡开题报告-基于图像特征提取与匹配的目标识别系统设计
北京联合大学毕业设计(论文)开题报告
题目:基于图像特征提取与匹配的目标识别系统设计
专业:通信工程指导教师:韩玺
学院:信息学院学号:30
班级:2008080304430姓名:赵宇凡
一、课题任务与目的
1、课题的主要任务:以DSP平台为系统硬件平台,并基于DM6437为处理器核心,设计硬件原理图,编写特征点提取算法,使系统通过特征点匹配对静态目标进行识别。
2、课题的主要目的:设计并实现一个功能完整,操作简单的目标识别系统,使其能够对静态图像目标进行特征提取与匹配,从而进行目标识别。
二、调研资料情况
1、课题的学术状态:
(1)DM6437关键特性
时钟频率达600MHz,1个TVP5146M2视频解码器4个视频DACV输出,128MDDR2DRAM,提供16M non-volatile flash memory, 64M NAND flash, 2M SRAM 提供UART, CAN,I/O接口,AIC33立体音频编码器,10/100 MBS以太网接口,可配置的boot load选项,嵌入式的JTAG仿真器接口,4个用户LEDs及4个用户切换点,提供子板扩展插槽,VLYNQ接口,提供S/PDIF接口。
(2)SIFT算法
从理论上说,SIFT是一种相似不变量,即对图像尺度变化和旋转是不变量。然而,由于构造SIFT特征时,在很多细节上进行了特殊处理,使得SIFT对图像的复杂变形和光照变化具有了较强的适应性,同时运算速度比较快,定位精度比较高。如:在多尺度空间采用DOG算子检测关键点,运算速度大大加快;关键点的精确定位不仅提高了精度,而且大大提高了关键点的稳定性;在构造描述子时,以子区域的统计特性,而不是以单个像素作为研究对象,提高了对图像局部变形的适应能力;对于16*16的关键点邻域和4*4的子区域,在处理梯度幅度时都进行了类似于高斯函数的加权处理,强化了中心区域,淡化了边缘区域的影响,从而提高了算法对几何变形的适应性;该方法不仅对通用的线
性光照模型具有不变性,而且对复杂的光照变化亦具有一定的适应性。
SIFT算法的特点:1. SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;
2.独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配;
3.多量性,即使少数的几个物体也可以产生大量的SIFT 特征向量;
4.高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
5. 可扩展性,可以很方便的与其他形式的特征向量进行联合。
2、参考文献
【1】《TMS320DM6437 Datasheet》,https://www.360docs.net/doc/148784268.html,
【2】https://www.360docs.net/doc/148784268.html,
【3】https://www.360docs.net/doc/148784268.html,/view/2832304.htm
【4】https://www.360docs.net/doc/148784268.html,/v8850239.htm
【5】《Allegro PCB Design CIS Getting Started Guide》,https://www.360docs.net/doc/148784268.html, 【6】周建雄,张笑微《基于DM6437的运动目标检测系统》,《信息化纵横》2009年第12期
【7】《C/C++图像处理编程》,清华大学出版社
【8】孙艳丽,李建海,王玲玲,孙晶《基于SIFT的多焦距图像特征点提取算法》,《现代电子技术》2010年第23期总第334期
【9】蒋建国,李明,齐美彬《基于TMS320DM6437的运动目标实时检测与跟踪》,合肥工业大学学报(自然科学版)2011年7月第34卷第7期【10】《OrCAD Capture User's Guide》,https://www.360docs.net/doc/148784268.html,
三、初步设计方法与实施方案
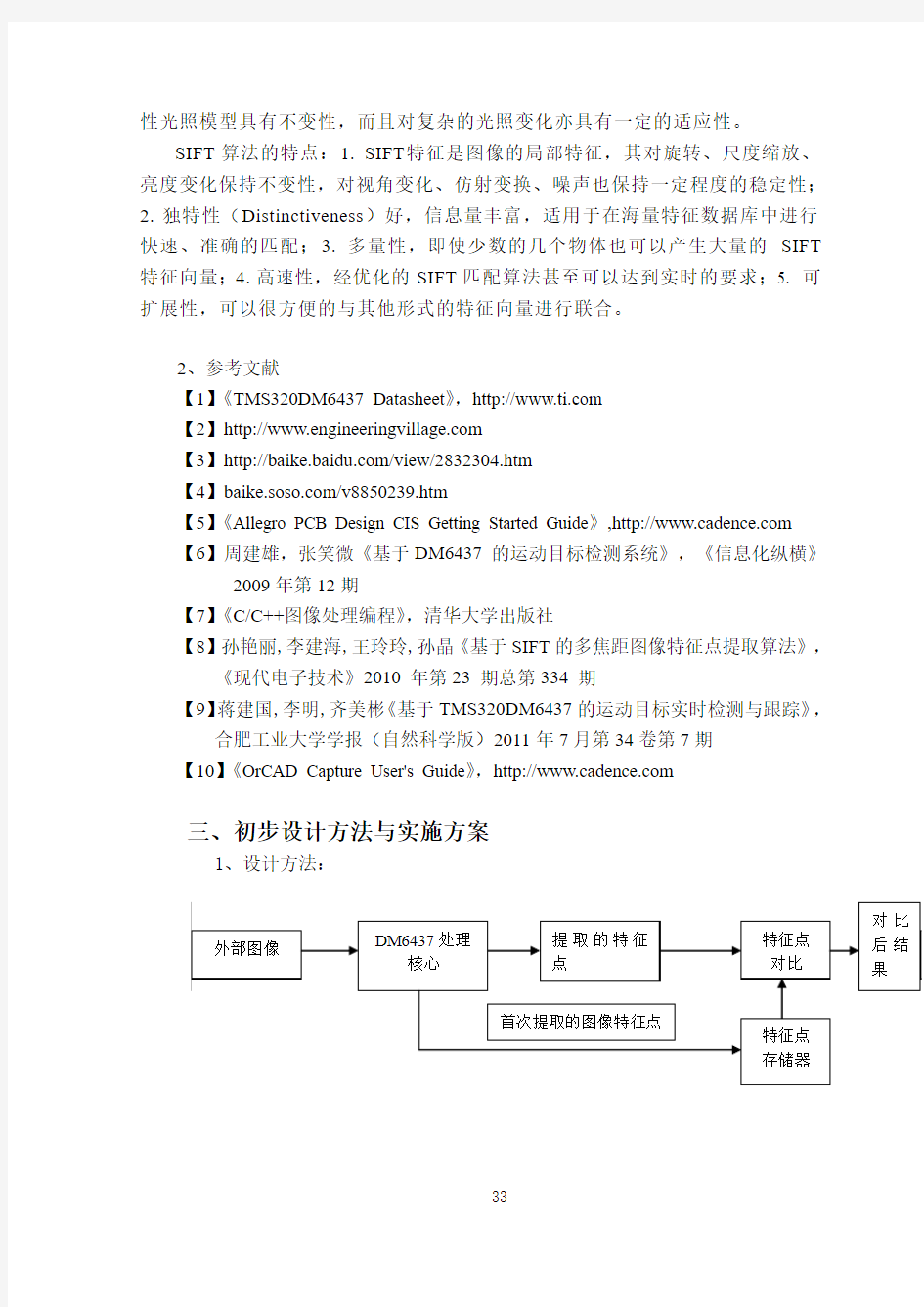
1、设计方法:
(1)、将外部图像传输到DM6437处理器。
(2)、在DM6436处理器中利用Sift算法对特征点进行提取。
(3)、将提取的特征点与以存特征点进行比对。
(4)、将对比结果进行反馈。
2、实施方案:
(1)、基于Sift算法设计特征点提取算法
(2)、设计硬件原理图
(3)、基于Matlab软件进行仿真
(4)、对仿真结果进行分析,并对不足处进行改进与优化
(5)、编写基于该DSP硬件平台的演示工程文件
四、预期结果
1、主要内容:本课题旨在设计出一套目标识别系统,通过图像特征提取与匹配算法实现目标的识别,图像数据由前端传输给出,系统硬件平台使用DSP平台。
2、预期结果:本课题结束后,基本应可以对静态图像目标进行特征点的提取与匹配,并对匹配后的结果进行反馈。
五、进度计划
第1周:查找相关资料对课题进行初步了解,撰写开题报告。
第2周:深入研究课题内容,对系统各部分模块进行了解。
第3-4周:对DM6437处理器核心进行研究
第5周:设计硬件原理图
第6-7周:研究SIFT算法
第8周:编写特征点提取算法
第9周:编写图像处理程序。
第10周:基于Matlab软件制作仿真文件
第11周:分析仿真文件
第12周:制作PCB原理图
第13周:系统测试及调试
第14周:撰写毕业论文
第15周:准备毕业答辩
第16周:毕业答辩
特征选择与特征提取
模式类别的可分性判据 在讨论特征选择和特征压缩之前,我们先要确定一个选择和提取的原则。对一个原始特征来说,特征选择的方案很多,从N 维特征种 选择出M 个特征共有()!!! M N N C M N M = -中选法,其中哪一种方案最佳, 则需要有一个原则来进行指导。同样,特征的压缩实际上是要找到M 个N 元函数,N 元函数的数量是不可数的,这也要有一个原则来指导找出M 个最佳的N 元函数。 我们进行特征选择和特征提取的最终目的还是要进行识别,因此应该是以对识别最有利原则,这样的原则我们称为是类别的可分性判据。用这样的可分性判据可以度量当前特征维数下类别样本的可分性。可分性越大,对识别越有利,可分性越小,对识别越不利。 人们对的特征的可分性判据研究很多,然而到目前为止还没有取得一个完全满意的结果,没有哪一个判据能够完全度量出类别的可分性。下面介绍几种常用的判据,我们需要根据实际问题,从中选择出一种。 一般来说,我们希望可分性判据满足以下几个条件: 1. 与识别的错误率由直接的联系,当判据取最大值时,识别的错误率最小; 2. 当特征独立时有可加性,即: ()()121 ,,,N ij N ij k k J x x x J x ==∑
ij J 是第i 类和第j 类的可分性判据,ij J 越大,两类的可分程度 越大,()12,,,N x x x 为N 维特征; 3. 应具有某种距离的特点: 0ij J >,当i j ≠时; 0 ij J =,当i j =时; ij ji J J =; 4. 单调性,加入新的特征后,判据不减小: ()()12121,,,,,,,ij N ij N N J x x x J x x x x +≤ 。 但是遗憾的是现在所经常使用的各种判据很难满足上述全部条件,只能满足一个或几个条件。 基于矩阵形式的可分性判据 1. 类内散度矩阵 设有M 个类别,1,,M ΩΩ ,i Ω类样本集()()(){}12,,,i i i i N X X X ,i Ω类 的散度矩阵定义为: () ()() ( )()() ( ) 1 1i N T i i i i i w k k k i S N == --∑X m X m 总的类内散度矩阵为: ()() ()() () ()() () () 1 1 1 1 i N M M T i i i i i w i w i k k i i k i S P S P N ==== Ω= Ω--∑∑∑X m X m 2. 类间散度矩阵 第i 个类别和第j 个类别之间的散度矩阵定义为: () () () ( )() () ( ) T ij i j i j B S =--m m m m 总的类间散度矩阵可以定义为:
图像颜色特征提取原理
一、颜色特征 1 颜色空间 1.1 RGB 颜色空间 是一种根据人眼对不同波长的红、绿、蓝光做出锥状体细胞的敏感度描述的基础彩色模式,R、 G、B 分别为图像红、绿、蓝的亮度值,大小限定在 0~1 或者在 0~255。 1.2 HIS 颜色空间 是指颜色的色调、亮度和饱和度,H表示色调,描述颜色的属性,如黄、红、绿,用角度 0~360度来表示;S 是饱和度,即纯色程度的量度,反映彩色的浓淡,如深红、浅红,大小限定在 0~1;I 是亮度,反映可见光对人眼刺激的程度,它表征彩色各波长的总能量,大小限定在 0~1。 1.3 HSV 颜色模型 HSV 颜色模型依据人类对于色泽、明暗和色调的直观感觉来定义颜色, 其中H (Hue)代表色度, S (Saturat i on)代表色饱和度,V (V alue)代表亮度, 该颜色系统比RGB 系统更接近于人们的经验和对彩色的感知, 因而被广泛应用于计算机视觉领域。 已知RGB 颜色模型, 令M A X = max {R , G, B },M IN =m in{R , G,B }, 分别为RGB 颜色模型中R、 G、 B 三分量的最大和最小值, RGB 颜色模型到HSV 颜色模型的转换公式为: S =(M A X - M IN)/M A X H = 60*(G- B)/(M A X - M IN) R = M A X 120+ 60*(B – R)/(M A X - M IN) G= M A X 240+ 60*(R – G)/(M A X - M IN) B = M A X V = M A X 2 颜色特征提取算法 2.1 一般直方图法 颜色直方图是最基本的颜色特征表示方法,它反映的是图像中颜色的组成分布,即出现了哪些颜色以及各种颜色出现的概率。其函数表达式如下: H(k)= n k/N (k=0,1,…,L-1) (1) 其中,k 代表图像的特征取值,L 是特征可取值的个数,n k是图像中具有特征值为 k 的象素的个数,N 是图像象素的总数。由上式可见,颜色直方图所描述的是不同色彩在整幅图像中所占的比例,无法描述图像中的对象或物体,但是由于直方图相对于图像以观察轴为轴心的旋转以及幅度不大的平移和缩放等几何变换是不敏感的,而且对于图像质量的变化也不甚敏感,所以它特别适合描述那些难以进行自动分割的图像和不需要考虑物体空间位置的图像。 由于计算机本身固有的量化缺陷,这种直方图法忽略了颜色的相似性,人们对这种算法进行改进,产生了全局累加直方图法和局部累加直方图法。 2.2 全局累加直方图法 全局累加直方图是以颜色值作为横坐标,纵坐标为颜色累加出现的频数,因此图像的累加直方空间 H 定义为:
图象视觉特征的提取与表示
第1章图像视觉特征的提取和表示 1.1引言 图像视觉特征的提取和表示是将图像的视觉信息转化成计算机能够识别和处理的定量形式的过程,是基于视觉内容的图像分类与检索的关键技术,因此,图像视觉特征的提取和表示一直是图像内容分析领域中一个非常活跃的课题。 图像底层视觉特征一定程度上能够反映图像的内容,可以描述图像所表达的意义,因此,研究图像底层视觉特征是实现图像分类与检索的第一步。一般来说,随着具体应用的不同,选用的底层特征也应有所不同,在特定的具体应用中,不同底层视觉特征的选取及不同的描述方式,对图像分类与检索的性能有很大的影响。通常认为,一种良好的图像视觉特征的提取和表示应满足以下几个要求: (1)提取简单,时间和空间复杂度低。 (2)区分能力强,对图像视觉内容相似的图像其特征描述之间也应相近,反之,对于视觉内容不相似的图像其特征描述之间应有一定的差别。 (3)与人的视觉感知相近,对人的视觉感觉相近的图像其特征描述之间也相近,对人的视觉感知有差别的图像其特征描述之间也有一定的差别。 (4)抗干扰能力强,鲁棒性好,对图像大小,方向不敏感,具有几何平移,旋转不变性。 本章重点讨论当前比较成熟的特征提取方法,在此基础上选取合适的特征提取方法,用于图像分类与检索系统的特征提取模块。接下来,将依次介绍颜色,纹理,形状等特征的提取和表示方法,最后对各种特征的特点加以比较。 1.2颜色特征的提取和表示 颜色是图像视觉信息的一个重要特征,是图像分类与检索中最为广泛应用的特征之一。一般来说同一类别的图像之间颜色信息具有一定的相似性,不同类别的图像,其颜色信息具有一定的差异。相对几何特征而言,颜色特征稳定性好,有对大小、方向不敏感等特点。因此,颜色特征的提取受到极大重视并得到深入研究。本章首先介绍几种常用的颜色空间模型,然后介绍各种颜色特征提取和表示方法。 1.2.1颜色空间模型 为了正确地使用颜色这一特征,需要建立颜色空间模型,通常的颜色空间模型可用三个基本量来描述,所以建立颜色空间模型就是建立一个3-D坐标系,其中每个空间点都代表某一种颜色。通常来说,对于不同的应用,应该选取不同的颜色空间模型。常用的颜色空间模型主要有:RGB、HIS、HSV、YUV、YIQ、Munsell、Lu*v*和La*b*等。颜色空间模型的选取需要符合一定的标准,下面就这一标准和最常用的颜色空间模型作一些介绍。 文献[错误!未找到引用源。]中介绍了选择颜色空间模型的标准主要有以下几个: (1)观察角度的鲁棒性
图像特征提取方法
图像特征提取方法 摘要 特征提取是计算机视觉和图像处理中的一个概念。它指的是使用计算机提取图像信息,决定每个图像的点是否属于一个图像特征。特征提取的结果是把图像上的点分为不同的子集,这些子集往往属于孤立的点、连续的曲线或者连续的区域。 至今为止特征没有万能和精确的图像特征定义。特征的精确定义往往由问题或者应用类型决定。特征是一个数字图像中“有趣”的部分,它是许多计算机图像分析算法的起点。因此一个算法是否成功往往由它使用和定义的特征决定。因此特征提取最重要的一个特性是“可重复性”:同一场景的不同图像所提取的特征应该是相同的。 特征提取是图象处理中的一个初级运算,也就是说它是对一个图像进行的第一个运算处理。它检查每个像素来确定该像素是否代表一个特征。假如它是一个更大的算法的一部分,那么这个算法一般只检查图像的特征区域。作为特征提取的一个前提运算,输入图像一般通过高斯模糊核在尺度空间中被平滑。此后通过局部导数运算来计算图像的一个或多个特征。 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。当光差图像时,常 常看到的是连续的纹理与灰度级相似的区域,他们相结合形成物体。但如果物体的尺寸很小 或者对比度不高,通常要采用较高的分辨率观察:如果物体的尺寸很大或对比度很强,只需 要降低分辨率。如果物体尺寸有大有小,或对比有强有弱的情况下同事存在,这时提取图像 的特征对进行图像研究有优势。 常用的特征提取方法有:Fourier变换法、窗口Fourier变换(Gabor)、小波变换法、最 小二乘法、边界方向直方图法、基于Tamura纹理特征的纹理特征提取等。
设计内容 课程设计的内容与要求(包括原始数据、技术参数、条件、设计要求等):一、课程设计的内容 本设计采用边界方向直方图法、基于PCA的图像数据特征提取、基于Tamura纹理特征的纹理特征提取、颜色直方图提取颜色特征等等四种方法设计。 (1)边界方向直方图法 由于单一特征不足以准确地描述图像特征,提出了一种结合颜色特征和边界方向特征的图像检索方法.针对传统颜色直方图中图像对所有像素具有相同重要性的问题进行了改进,提出了像素加权的改进颜色直方图方法;然后采用非分割图像的边界方向直方图方法提取图像的形状特征,该方法相对分割方法具有简单、有效等特点,并对图像的缩放、旋转以及视角具有不变性.为进一步提高图像检索的质量引入相关反馈机制,动态调整两幅图像相似度中颜色特征和方向特征的权值系数,并给出了相应的权值调整算法.实验结果表明,上述方法明显地优于其它方法.小波理论和几个其他课题相关。所有小波变换可以视为时域频域的形式,所以和调和分析相关。所有实际有用的离散小波变换使用包含有限脉冲响应滤波器的滤波器段(filterbank)。构成CWT的小波受海森堡的测不准原理制约,或者说,离散小波基可以在测不准原理的其他形式的上下文中考虑。 通过边缘检测,把图像分为边缘区域和非边缘区域,然后在边缘区域内进行边缘定位.根据局部区域内边缘的直线特性,求得小邻域内直线段的高精度位置;再根据边缘区域内边缘的全局直线特性,用线段的中点来拟合整个直线边缘,得到亚像素精度的图像边缘.在拟合的过程中,根据直线段转角的变化剔除了噪声点,提高了定位精度.并且,根据角度和距离区分出不同直线和它们的交点,给出了图像精确的矢量化结果 图像的边界是指其周围像素灰度有阶跃变化或屋顶变化的那些像素的集合,边界广泛的存在于物体和背 景之间、物体和物体之间,它是图像分割所依赖的重要特征.边界方向直方图具有尺度不变性,能够比较好的 描述图像的大体形状.边界直方图一般是通过边界算子提取边界,得到边界信息后,需要表征这些图像的边 界,对于每一个边界点,根据图像中该点的梯度方向计算出该边界点处法向量的方向角,将空间量化为M级, 计算每个边界点处法向量的方向角落在M级中的频率,这样便得到了边界方向直方图. 图像中像素的梯度向量可以表示为[ ( ,),),( ,),)] ,其中Gx( ,),),G ( ,),)可以用下面的
开题报告:人脸识别
北方工业大学 本科毕业设计(论文)开题报告书 题目:基于直方图差值比较方法的人脸识别系统指导教师: 专业班级: 学号: 姓名: 日期:2013年3月20日
一、选题的目的、意义 近些年来,有关人脸的处理已受到广大研究人员越来越多的重视,如人脸识别、人脸定位、面部表情识别、人脸跟踪等。人脸处理系统在安全系统的身份认证、智能人机接口、图像监控、视频检索等领域有着广泛的应用前景。 此外在进行人工智能的研究中,人们一直想做的事情就是让机器具有像人类一样的思考能力,以及识别事物、处理事物的能力,因此从解剖学、心理学、行为感知学等各个角度来探求人类的思维机制、以及感知事物、处理事物的机制,并努力将这些机制用于实践,如各种智能机器人的研制。 同时,进行人脸图像识别研究也具有很大的使用价依。如同人的指纹一样,人脸也具有唯一性,也可用来鉴别一个人的身份。人脸图像的自动识别系统较之指纹识别系统、DNA鉴定等更具方便性,因为它取样方便,可以不接触目标就进行识别,从而开发研究的实际意义更大。并且与指纹图像不同的是,人脸图像受很多因素的干扰:人脸表情的多样性;以及外在的成像过程中的光照,图像尺寸,旋转,姿势变化等。使得同一个人,在不同的环境下拍摄所得到的人脸图像不同,有时更会有很大的差别,给识别带来很大难度。因此在各种干扰条件下实现人脸图像的识别,也就更具有挑战性。 人脸图像识别除了具有重大的理论价值以及极富挑战性外,还其有许多潜在的应用前景,利用人脸图像来进行身份验证,可以不与目标相接触就取得样本图像,而其它的身份验证手段,如指纹、眼睛虹膜等必须通过与目标接触或相当接近来取得样木,在某些场合,这些识别手段就会有不便之处。
关于图像特征提取
关于图像特征提取 特征提取是计算机视觉和图像处理中的一个概念。它指的是使用计算机提取图像信息,决定每个图像的点是否属于一个图像特征。特征提取的结果是把图像上的点分为不同的子集,这些子集往往属于孤立的点、连续的曲线或者连续的区域。 特征的定义 至今为止特征没有万能和精确的定义。特征的精确定义往往由问题或者应用类型决定。特征是一个数字图像中“有趣”的部分,它是许多计算机图像分析算法的起点。因此一个算法是否成功往往由它使用和定义的特征决定。因此特征提取最重要的一个特性是“可重复性”:同一场景的不同图像所提取的特征应该是相同的。 特征提取是图象处理中的一个初级运算,也就是说它是对一个图像进行的第一个运算处理。它检查每个像素来确定该像素是否代表一个特征。假如它是一个更大的算法的一部分,那么这个算法一般只检查图像的特征区域。作为特征提取的一个前提运算,输入图像一般通过高斯模糊核在尺度空间中被平滑。此后通过局部导数运算来计算图像的一个或多个特征。 有时,假如特征提取需要许多的计算时间,而可以使用的时间有限制,一个高层次算法可以用来控制特征提取阶层,这样仅图像的部分被用来寻找特征。 由于许多计算机图像算法使用特征提取作为其初级计算步骤,因此有大量特征提取算法被发展,其提取的特征各种各样,它们的计算复杂性和可重复性也非常不同。 边缘 边缘是组成两个图像区域之间边界(或边缘)的像素。一般一个边缘的形状可以是任意的,还可能包括交叉点。在实践中边缘一般被定义为图像中拥有大的梯度的点组成的子集。一些常用的算法还会把梯度高的点联系起来来构成一个更完善的边缘的描写。这些算法也可能对边缘提出一些限制。 局部地看边缘是一维结构。 角 角是图像中点似的特征,在局部它有两维结构。早期的算法首先进行边缘检测,然后分析边缘的走向来寻找边缘突然转向(角)。后来发展的算法不再需要边缘检测这个步骤,而是可以直接在图像梯度中寻找高度曲率。后来发现这样有时可以在图像中本来没有角的地方发现具有同角一样的特征的区域。 区域 与角不同的是区域描写一个图像中的一个区域性的结构,但是区域也可能仅由一个像素组成,因此许多区域检测也可以用来监测角。一个区域监测器检测图像中一个对于角监测器来说太平滑的区域。区域检测可以被想象为把一张图像缩小,然后在缩小的图像上进行角检测。 脊 长条形的物体被称为脊。在实践中脊可以被看作是代表对称轴的一维曲线,此外局部针对于每个脊像素有一个脊宽度。从灰梯度图像中提取脊要比提取边缘、角和区域困难。在空中摄影中往往使用脊检测来分辨道路,在医学图像中它被用来分辨血管。 特征抽取 特征被检测后它可以从图像中被抽取出来。这个过程可能需要许多图像处理的计算机。其结果被称为特征描述或者特征向量。 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一颜色特征 (一)特点:颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特
图像分割和特征提取技术研究
毕业设计 图像分割和特征提取技术研究 摘要 图像分割是图像分析的第一步,是图像理解的重要组成部分,在有关图像处理的几乎所有领域具有广泛的应用。因此,图像分割一直受到高度重视,对其研究具有十分重要的意义。长期以来,研究人员提出了许多实用的分割算法。随着统计学理论,神经网络,小波理论等在图像分割中的应用日益广泛,遗传算法、尺度空间、非线性扩散方程等近期涌现的新方法和新思想也不断被用于解决分割问题,许多国内外学者也针对一些具体应用提出了许多实用有效的方法。 本文介绍了数字图像处理技术中图像分割技术的基本理论和三种图像分割方法(1)基于阈值图像分割;(2)基于边缘检测及算子分割;(3)基于区域特性的图像分割。对基于点的分割方法进行了较全面的叙述,主要研究了图像分割方法中的边缘检测法,区域提取法和阈值分割法。通过大量的理论研习。并编写了MATLAB软件程序,对各分割方法进行了仿真实验,得到分割图像。最后对于仿真进行了数据处理分析,验证了Canny算子的整体效果最好, Prewitt算子分割细致。但对于一幅图像仅仅只有只用一种方法达不到很好的效果,而根据待分割图象的不同特点,结合已知的先验知识,研究符合具体图象特性的分割模型,才是提高图象分割的重要手段。 关键词:图像分割;边缘法;区域法;阈值法;分水岭分割法
Lmage Segmentation And Feature Extraction Technology Research Abstract Image segmentation is the first step in image analysis, image segmentation is an important component of image understanding, in almost all areas of the image processing has widely application. As a result, image segmentation has been attached great importance to, its research has the very vital significance. For a long time,researchers put forward many practical segmentation algorithm. With statistics theory, the neural network, wavelet theory has been used increasingly in image segmentation, such as genetic algorithm, scale space, and nonlinear diffusion equation with the recent emergence of new methods and new ideas are constantly being used to solve the segmentation problem, many scholars at home and abroad for some specific application put forward many practical and effective method. Digital image processing techniques were introduced in This paper introduces the digital image processing technology of image segmentation technology in basic theory and three methods of image segmentation. (1) based on threshold image segmentation. (2) segmentation based on edge detection and operator; (3) the image segmentation based on region feature. On the segmentation method based on the point of narrative, mainly studies the edge of image segmentation method, region extraction method and threshold segmentation method. Through a lot of theory study. And write the MATLAB software, the segmentation method, the simulation experiment for image segmentation. Finally analyzed the data processing for simulation.Verify the Canny operator of the overall effect is best. Prewitt operator segmentation and detailed. But for an image only only one way to reach a good effect, and according to the different characteristics of for image segmentation, combined with the known prior knowledge, research in accordance with the specific image segmentation model, is an important means to improve the image segmentation. KEYWORDS:Segmentation;edge method;the regional method;threshold;watershed segmentation
图像特征提取总结
图像常见特征提取方法简介 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一、颜色特征 (一)特点:颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。颜色直方图是最常用的表达颜色特征的方法,其优点是不受图像旋转和平移变化的影响,进一步借助归一化还可不受图像尺度变化的影响,基缺点是没有表达出颜色空间分布的信息。 (二)常用的特征提取与匹配方法 (1)颜色直方图 其优点在于:它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于:它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。 最常用的颜色空间:RGB颜色空间、HSV颜色空间。 颜色直方图特征匹配方法:直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。 (2)颜色集 颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从RGB颜色空间转化成视觉均衡的颜色空间(如HSV 空间),并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系 (3)颜色矩 这种方法的数学基础在于:图像中任何的颜色分布均可以用它的矩来表示。此外,由于颜色分布信息主要集中在低阶矩中,因此,仅采用颜色的一阶矩(mean)、二阶矩(variance)和三阶矩(skewness)就足以表达图像的颜色分布。 (4)颜色聚合向量 其核心思想是:将属于直方图每一个柄的像素分成两部分,如果该柄内的某些像素所占据的连续区域的面积大于给定的阈值,则该区域内的像素作为聚合像素,否则作为非聚合像素。(5)颜色相关图 二纹理特征 (一)特点:纹理特征也是一种全局特征,它也描述了图像或图像区域所对应景物的表面性质。但由于纹理只是一种物体表面的特性,并不能完全反映出物体的本质属性,所以仅仅利用纹理特征是无法获得高层次图像内容的。与颜色特征不同,纹理特征不是基于像素点的特征,它需要在包含多个像素点的区域中进行统计计算。在模式匹配中,这种区域性的特征具有较大的优越性,不会由于局部的偏差而无法匹配成功。作为一种统计特征,纹理特征常具有旋转不变性,并且对于噪声有较强的抵抗能力。但是,纹理特征也有其缺点,一个很明显的缺点是当图像的分辨率变化的时候,所计算出来的纹理可能会有较大偏差。另外,由于有可能受到光照、反射情况的影响,从2-D图像中反映出来的纹理不一定是3-D物体表面真实
赵宇凡开题报告-基于图像特征提取与匹配的目标识别系统设计
北京联合大学毕业设计(论文)开题报告 题目:基于图像特征提取与匹配的目标识别系统设计 专业:通信工程指导教师:韩玺 学院:信息学院学号:30 班级:2008080304430姓名:赵宇凡 一、课题任务与目的 1、课题的主要任务:以DSP平台为系统硬件平台,并基于DM6437为处理器核心,设计硬件原理图,编写特征点提取算法,使系统通过特征点匹配对静态目标进行识别。 2、课题的主要目的:设计并实现一个功能完整,操作简单的目标识别系统,使其能够对静态图像目标进行特征提取与匹配,从而进行目标识别。 二、调研资料情况 1、课题的学术状态: (1)DM6437关键特性 时钟频率达600MHz,1个TVP5146M2视频解码器4个视频DACV输出,128MDDR2DRAM,提供16M non-volatile flash memory, 64M NAND flash, 2M SRAM 提供UART, CAN,I/O接口,AIC33立体音频编码器,10/100 MBS以太网接口,可配置的boot load选项,嵌入式的JTAG仿真器接口,4个用户LEDs及4个用户切换点,提供子板扩展插槽,VLYNQ接口,提供S/PDIF接口。 (2)SIFT算法 从理论上说,SIFT是一种相似不变量,即对图像尺度变化和旋转是不变量。然而,由于构造SIFT特征时,在很多细节上进行了特殊处理,使得SIFT对图像的复杂变形和光照变化具有了较强的适应性,同时运算速度比较快,定位精度比较高。如:在多尺度空间采用DOG算子检测关键点,运算速度大大加快;关键点的精确定位不仅提高了精度,而且大大提高了关键点的稳定性;在构造描述子时,以子区域的统计特性,而不是以单个像素作为研究对象,提高了对图像局部变形的适应能力;对于16*16的关键点邻域和4*4的子区域,在处理梯度幅度时都进行了类似于高斯函数的加权处理,强化了中心区域,淡化了边缘区域的影响,从而提高了算法对几何变形的适应性;该方法不仅对通用的线
信息分析开题报告
开题报告 课题名称:微博用户于传统媒体中的行为研究 一、研究背景: Web2.0的时代,网络已成为人们获取信息、分享信息的最自由、广阔的平台。传统媒体诸如电视、广播、报刊、杂志虽然努力维持其在媒体界的地位,但事实证明,面对网络迅速占领市场的冲击,新闻媒体所要做的不是盲目的抵制,而是善于抓住新环境带来的机遇,开拓另一种适应新环境的传播媒介——电子媒介。当前,在内容制作上,传统媒体早已将内容电子化,并且内容的生产过程也日益网络化、数字化,实现了移动采编;在传播方式上,传统媒体对移动客户版本的开发非常积极,同时紧跟网络潮流,非常注重依靠新兴网络应用进行推广……而最近两年说到网络最热门的应用,非微博莫属。截至2010年10月20日仅新浪微博用户就达到5000万。这5000万个用户几乎涵盖了全球华人的各个年龄层、各阶层,真正搭建了一个名人与草根拥有平等话语权的互联网的世界。据最新统计,新浪微博每天发博数超过2500万条……微博呈几何级的增长速度,彰显着其旺盛的生命力,也改变和影响了很多人的生活。与此同时也为传统媒体的数字化、网络化带来了另一种改革的思路。据统计,除了不计其数的总编辑、主编、记者、制片人、主播等传统媒体人开通新浪微博之外,截至2010年10月,国内共有561家主流新闻机构开通了新浪微博。人们俨然正在走向“微新闻“的时代。 新闻行业中微博的技术优势在于:一是信源广泛,所有微博用户都是消息源;二是时效性强,所有用户都可能是第一或前端信源,随时随地、全天候同步直播新闻,成为不折不扣的“草根记者”;三是扩散快而广,通过粉丝机制和用户转发可以达成几何级、病毒式的高速传播。此外,还具有个性化、互动性强等优势,同时,媒体借助微博这个平台能很大程度上提升自己的知名度和信誉。可以说,微博在信息源、快速反应、传播扩散等方面的种种优秀表现,使人们开始脱离对传统媒体的依赖,进一步打破了后者的“渠道霸权”,也使微博自身正在成为一种新的媒体力量。 二、研究意义: 媒体开通微博并不只是增加一种传播信息的渠道,对于媒体来说,微博不同于电视、广播、报刊、杂志的单方面传输,它提供的是一种双向、实时的交流平台,用户在获得信息的同时能够及时的向外传播,及时的做出反馈,而同时无论是用户的转发行为还是用户的评论都可以被媒体获得,这是一种很有价值的用户反馈信息,根据用户的反馈行为推测用户的使用习惯以及规律,然后对用户进行管理。虽然用户管理的实践大多应用在企业管理中,基于微博这种网络平台的用户管理缺少实例,但将媒体微博换种角度来看,它也是一种“企业”,追求市场的占有率以及影响力,如此看来,媒体微博也可以效仿传统企业的经营管理理念,实施用户的管理工作。 正如商品市场用户的多样性一样,微博用户同样在微博使用行为上具有多样性。有的用户热衷于微博,不仅发表微博频繁,且具有庞大的粉丝群,对于自己关注到的微博反馈行为也相当积极;有的用户乐于从微博中获取最新消息,但自己不积极发表微博;有的用户大量关注别人,而自己的粉丝却很少……不同的粉丝行为都会为媒体微博带来一定的影响,如果能够实现对各类粉丝进行价值挖掘,通过粉丝的微博圈扩大微博的市场占有范围,利用粉丝的微博扩大新闻的传播速度与广度,通过粉丝的影响力间接扩大自己的影响力,则是媒体微博发展的一种思路,不仅能改变当前媒体微博被粉丝选择的被动局面,同时成为媒体利用微博拓展网络市场开展电子业务的有力手段。
图像特征提取与分析复习资料
图像分割概念:图像分割就是把图像分成各特性的区域并提取出感兴趣目标的技术和过程。这些区域互相不交叉,每一个区域都满足特定区域的一致性。医学图像的特点:成像设备的局限性、组织的蠕动-----伪影和噪声局部体效应------组织边缘模糊病变组织---------病变边缘不明确不均匀的组织器官-------灰度不均匀模糊、不均匀、个体差异、复杂多样医学图像分割方法的特点1、分割算法一般面向具体的分割任务,没有通用的方法2、重视多种分割算法的有效结合3、需要利用医学中大量领域的知识4、交互式分割方法受到日益重视图像分割算法基于区域的分割方法基于边缘的分割方法基于数学形态学的分割方法灰度阈值法:灰度值域法是把图像的灰度分成不同的等级,然后用设置灰度阈值的方法确定有意义的区域或分割物体的边界. 令f(x,y)原始图像 阈值的选取:1直方图法(极小值点阈值) 2 最小误差阈值 3 迭代阈值分割 4 最大方差阈值分割边缘检测(Edge Detection):基本思想是先检测图像中的边缘点,再按照某种策略将边缘沿点连接成轮廓,从而构成分割区域。边缘:指图像局部亮度变化显著的部分. 边缘的检测方法:最简单的边缘检测方法是并行微分算子法。利用相邻区域的像素值不连续的性
质,采用一阶或二阶导数来检测边缘点。一阶导数求极值点,二阶导数求过零点。一阶梯度算子:Roberts交叉算子Sobel算子 Priwitt 算子二阶拉普拉斯算子:在此基础上LoG 算子 Canny算子 :推导了最优边缘检测算子区域生长(region growing) 基本思想:将具有相似性质的像素集合起来构成区域。具体步骤:先对每个需要分割的区域找一个种子象素作为生长的起点,然后将种子象素周围邻域中与种子象素具有相同或相似性质的像素(根据某种事先确定的生长或相似准则来判定)合并到种子象素所在的区域中。将这些新象素当作新的种子象素继续进行上面的过程,直到在没有满足条件的像素可被包括进来。这样一个区域就生长了。解决的问题:① 如何选择一组能正确代表所需区域的种子象素; ② 如何确定在生长过程中能将相邻象素包括近来的准则;③如何确定生长终止的条件或规则例如:每一步所接受的邻近点的灰度级与先前物体的平均灰度级相差小于2。起始第二步第三步558655865586 48974897 4897 228322832283 333333333333 分裂合并(splitting and merging) 基本思想:从整幅图像开始通过不断分裂得到各个区域.具体步骤:先把图像分成任意大小且不重叠的区域,然后再合并或分裂这些区域以满足
基于matlab人脸识别技术 开题报告
毕业设计(论文)开题报告 毕业设计(论文)课题情况,根据所查阅的文献资料,每人撰写2500字以上的文献综述,文后应列出所查阅的文献资料。 基于matlab人脸识别技术的实现 文献综述 一、MATLAB概述 MATLAB是矩阵实验室(Matrix Laboratory)的简称,是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。MATLAB主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。而在本文中主要用到的功能是图像处理功能。 二、BP神经网络概述 人工神经网络(Artificial Neural Net works,简写为ANNs)也简称为神经网络(NNs)或称作连接模型(Connectionist Model),它是一种模范动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的。 人工神经网络发展的主要历程有:20世纪50年代末,Rosenblatt提出的感知器模型和Widrow提出的自适应线性元件,出现了简单的线性分类器;1986年,Rumelhart和Mcllelland 提出了层网络“误差反向传播算法(BP)”,使有导师学习多层感知器网络(ML PN)模式分类器走向实用化,在此基础上又派生出若干前向网络,如径向基函数网络( RBFN)和函数链网络等;1982年,美国加州工学院的物理学家Hopfield提出的一种用于联想记忆和优化计算的反馈网络模型,由于引进了“能量函数” 的概念,使网络走向具体电路有了保证;20世纪70年代,Watanabe 提出了使用模式子空间的概念来设计不同类别对应的子空间,由不同类别聚类的子空间实现模式识别; Kohonen提出的自组织特征映射网络模型等都为神经网络模式识别理论提供了进一步的根据。 构成人工神经网络的三个基本要素是:神经元、络拓扑结构和网络的训练(学习)方法。神经元(节点)的作用是把若干输入加权求和,并对这种加权和进行非线性处理后输出。神经元的选择一般有以下特点:每个神经元都具有多个输入、个输出,具有闭值,采用非线性函数。 1、神经元
图像目标提取及特征计算
摘要 对图像进行研究和应用时,人们往往对图像中的某些部分感兴趣,这些部分常被称为目标或对象 目标或对象特征提取是计算机视觉和图像处理中的一个概念。它指的是使用计算机提取图像信息,决定每个图像的点是否属于一个图像特征。特征提取的结果是把图像上的点分为不同的子集,这些子集往往属于孤立的点、连续的曲线或者连续的区域。 本课设需要解决的问题是,利用阈值分割方法,对该图像进行分割,得到提取那个目标后的二值图像,计算该目标的面积、周长、中心坐标等三个参数。阈值分割采用的是全局阈值分割方法,而面积、周长的计算则是先通过将图像转换成二值图像,在通过计算二值图像像素点的方式求取。 关键词:阈值分割,边缘检测,像素点
1绪论 目标的特征提取是图像处理和自动目标识别(ATR)中的一个重要的研究课题,是解决图像识别问题的难点和关键。 特征提取是图象处理中的一个初级运算,也就是说它是对一个图像进行的第一个运算处理。它检查每个像素来确定该像素是否代表一个特征。假如它是一个更大的算法的一部分,那么这个算法一般只检查图像的特征区域。作为特征提取的一个前提运算,输入图像一般通过高斯模糊核在尺度空间中被平滑。此后通过局部导数运算来计算图像的一个或多个特征。 有时,假如特征提取需要许多的计算时间,而可以使用的时间有限制,一个高层次算法可以用来控制特征提取阶层,这样仅图像的部分被用来寻找特征。 由于许多计算机图像算法使用特征提取作为其初级计算步骤,因此有大量特征提取算法被发展,其提取的特征各种各样,它们的计算复杂性和可重复性也非常不同。 2 设计原理 2.1 常用的特征提取的方法 提取图像空间关系特征可以有两种方法:一种方法是首先对图像进行自动分割,划分出图像中所包含的对象或颜色区域,然后根据这些区域提取图像特征,并建立索引;另一种方法则简单地将图像均匀地划分为若干规则子块,然后对每个图像子块提取特征,并建立索引。 本课程设计是采用的第一种方法,即先对该图像进行分割,得到提取那个目标后的二值图像,计算该目标的面积、周长、中心坐标等三个参数。阈值分割采用的是全局阈值分割方法,而面积、周长的计算则是先通过将图像转换成二值图像,在通过计算二值图像像素点的方式求取。其中计算周长时,先需要对二值图像进行边缘检测,然后再统计其像素点。 2.2 阈值分割原理 图像阈值化分割是一种最常用,同时也是最简单的图像分割方法,它特别适用于目标和背景占据不同灰度级范围的图像[1]。它不仅可以极大的压缩数据量,而且也大大简化了分析和处理步骤,因此在很多情况下,是进行图像分析、特征
(完整版)图像特征特点及常用的特征提取与匹配方法
图像特征特点及常用的特征提取与匹配方法 常用的图像特征有颜色特征、纹理特征、形状特征、空间关系特征。 一颜色特征 (一)特点:颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质。一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。另外,仅使用颜色特征查询时,如果数据库很大,常会将许多不需要的图像也检索出来。颜色直方图是最常用的表达颜色特征的方法,其优点是不受图像旋转和平移变化的影响,进一步借助归一化还可不受图像尺度变化的影响,基缺点是没有表达出颜色空间分布的信息。 (二)常用的特征提取与匹配方法 (1) 颜色直方图 其优点在于:它能简单描述一幅图像中颜色的全局分布,即不同色彩在整幅图像中所占的比例,特别适用于描述那些难以自动分割的图像和不需要考虑物体空间位置的图像。其缺点在于:它无法描述图像中颜色的局部分布及每种色彩所处的空间位置,即无法描述图像中的某一具体的对象或物体。 最常用的颜色空间:RGB颜色空间、HSV颜色空间。 颜色直方图特征匹配方法:直方图相交法、距离法、中心距法、参考颜色表法、累加颜色直方图法。 (2) 颜色集 颜色直方图法是一种全局颜色特征提取与匹配方法,无法区分局部颜色信息。颜色集是对颜色直方图的一种近似首先将图像从RGB颜色空间转化成视觉均衡 的颜色空间(如HSV 空间),并将颜色空间量化成若干个柄。然后,用色彩自动分割技术将图像分为若干区域,每个区域用量化颜色空间的某个颜色分量来索引,从而将图像表达为一个二进制的颜色索引集。在图像匹配中,比较不同图像颜色集之间的距离和色彩区域的空间关系 (3) 颜色矩
模式识别特征选择与提取
模式识别特征选择与提取 中国矿业大学计算机科学与技术学院电子信息科学系 班级:信科11-1班,学号:08113545,姓名:褚钰博 联系方法(QQ或手机):390345438,e-mail:390345438@https://www.360docs.net/doc/148784268.html, 日期:2014 年06月10日 摘要 实际问题中常常需要维数约简,如人脸识别、图像检索等。而特征选择和特征提取是两种最常用的维数约简方法。特征选择是从某些事物中提取出本质性的功能、应用、优势等,而特征提取是对特征空间进行变换,将原始特征空间映射到低维空间中。 本文是对主成分分析和线性判别分析。 关键词:特征选择,特征提取,主成分分析,线性判别分析 1.引言 模式识别的主要任务是利用从样本中提取的特征,并将样本划分为相应的模式类别,获得好的分类性能。而分类方法与分类器设计,都是在d(变量统一用斜体)维特征空间已经确定的前提下进行的。因此讨论的分类器设计问题是一个选择什么准则、使用什么方法,将已确定的d维特征空间划分成决策域的问题。对分类器设计方法的研究固然重要,但如何确定合适的特征空间是设计模式识别系统另一个十分重要,甚至更为关键的问题。如果所选用的特征空间能使同类物体分布具有紧致性,即各类样本能分布在该特征空间中彼此分割开的区域内,这就为分类器设计成功提供良好的基础。反之,如果不同类别的样本在该特征空间中混杂在一起,再好的设计方法也无法提高分类器的准确性。本文要讨论的问题就是特征空间如何设计的问题。 基于主成分分析的特征选择算法的思想是建立在这样的基础上的:主成分分析方法将原始特征通过线性变换映射到新的低维空间时,获得的主成分是去了新的物理意义,难以理解,并且主成分是所有原始特征的线性组合。所以将主成分分析与特征选择相结合,设计多种相似性度量准则,通过找到与主成分相关的关键特征或者删除冗余、不相关以及没有意义的特征,将主成分又重新映射到原始空间,来理解成主成分的实际意义。 基于线性判别分析的高维特征选择将单个特征的Fisher准则与其他特征选择算法相结合,分层消除不相关特征与冗余特征。不相关特征滤波器按照每个特征的Fisher评价值进行特征排序,来去除噪音和不相关特征。通过对高维数据特征关联性的分析,冗余特征滤波器选用冗余度量方法和基于相关性的快速过滤器算法。分别在不同情境下进行数据分类实验,验证其性能。