轮式移动机器人滑模轨迹跟踪控制
激光焊缝跟踪系统机器人用技术手册
Meta Vision Systems 机器人用激光焊缝 跟踪系统 技术手册 原作者:Jonathan Moore 翻译:Dr. Lin Sanbao (林三宝博士)
前言 尽管我们在编写这个手册时已经尽了最大努力,但是我们不接受任何由通过使用或者错误使用本手册中的信息,或者可能包含在本手册中的错误,而引发的责任和义务。本手册所提供的信息只是用于培训的目的。 英文版权所有 ? Meta Vision Systems 2000。 中文版版权所有? 中国哈尔滨AWPT-RDC联合实验室 所有权力保留,未经允许,不得以任何形式复制本手册或本手册中的任何部分。 联系方式: Meta Vision Systems Ltd. Oakfield House Oakfield Industrial Estate Eynsham Oxfordshire OX8 1TH UNITED KINGDOM Tel: +44 (0) 1865 887900 Fax: +44 (0) 1865 887901 Email: support@https://www.360docs.net/doc/1517655787.html, 中国地区: 地址:珠海市九洲大道兰埔白石路105号二楼西 邮编:519000 电话:0756 --- 8509695、8508516、6680610、6602419、6626464 传真:0756 --- 8500745 联系人:魏占静 电邮:jbw@https://www.360docs.net/doc/1517655787.html, wzj0756@https://www.360docs.net/doc/1517655787.html, 网址:https://www.360docs.net/doc/1517655787.html,
目录 1.概述 (3) 1.1传感头 (3) 1.2控制系统 (3) 1.3应用 (3) 1.4典型应用 (4) 1.5焊缝类型 (4) 2.传感器 (9) 2.1激光的安全性 (9) 2.2规格 (9) 2.3MT 产品系列的规格 (11) 2.4传感器的物理规格 (12) 2.5焊缝的特征尺寸 (12) 3.控制系统 (14) 3.1MTF – Finder(MTF 定位控制系统) (14) 3.2MTR (15) 3.3MTR Integrated(集成型MTR系统) (16) 3.4MTX-HS (16) 4.软件的主要特征 (18) 4.1焊缝定义 (18) 4.2间隙测量 (18) 4.3真实路径(True Path) (18) 4.4搜索 (18) 4.5体积&高度错边测量 (19) 4.6交替式激光器 (19) 4.7示教跟踪(Teach Track) (20) 5.配置和可选项 (21) 5.1应用概述 (21) 5.2硬件和软件可选项 (22)
运动控制系统基本架构及控制轨迹要点简述
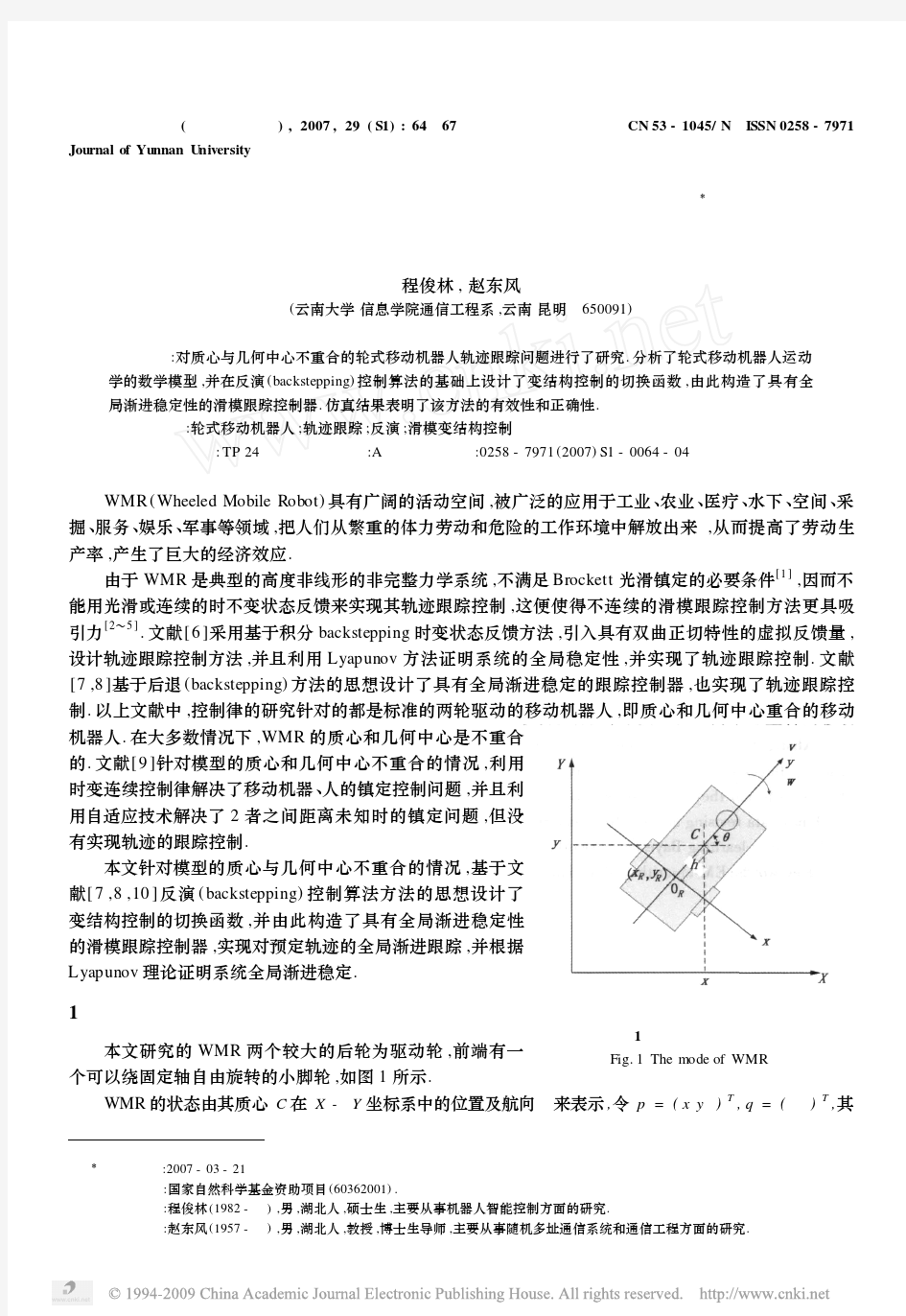
运动控制系统基本架构及控制轨迹要点简述 运动控制起源于早期的伺服控制。简单地说,运动控制就是对机械运动部件的位置、速度等进行实时的控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动。早期的运动控制技术主要是伴随着数控技术、机器人技术和工厂自动化技术的发展而发展的。早期的运动控制器实际上是可以独立运行的专用的控制器,往往无需另外的处理器和操作系统支持,可以独立完成运动控制功能、工艺技术要求的其他功能和人机交互功能。这类控制器可以成为独立运行的运动控制器。这类控制器主要针对专门的数控机械和其他自动化设备而设计,往往已根据应用行业的工艺要求设计了相关的功能,用户只需要按照其协议要求编写应用加工代码文件,利用RS232或者DNC方式传输到控制器,控制器即可完成相关的动作。这类控制器往往不能离开其特定的工艺要求而跨行业应用,控制器的开放性仅仅依赖于控制器的加工代码协议,用户不能根据应用要求而重组自己的运动控制系统。 运动控制的定义 运动控制(MC)是自动化的一个分支,它使用通称为伺服机构的一些设备如液压泵,线性执行机或者是电机来控制机器的位置和/或速度。运动控制在机器人和数控机床的领域内的应用要比在专用机器中的应用更复杂,因为后者运动形式更简单,通常被称为通用运动控制(GMC)。运动控制被广泛应用在包装、印刷、纺织和装配工业中。 运动控制系统的基本架构组成 一个运动控制器用以生成轨迹点(期望输出)和闭合位置反馈环。许多控制器也可以在内部闭合一个速度环。 一个驱动或放大器用以将来自运动控制器的控制信号(通常是速度或扭矩信号)转换为更高功率的电流或电压信号。更为先进的智能化驱动可以自身闭合位置环和速度环,以获得更精确的控制。 一个执行器如液压泵、气缸、线性执行机或电机用以输出运动。
三维空间连续系统的目标轨迹预见跟踪控制2
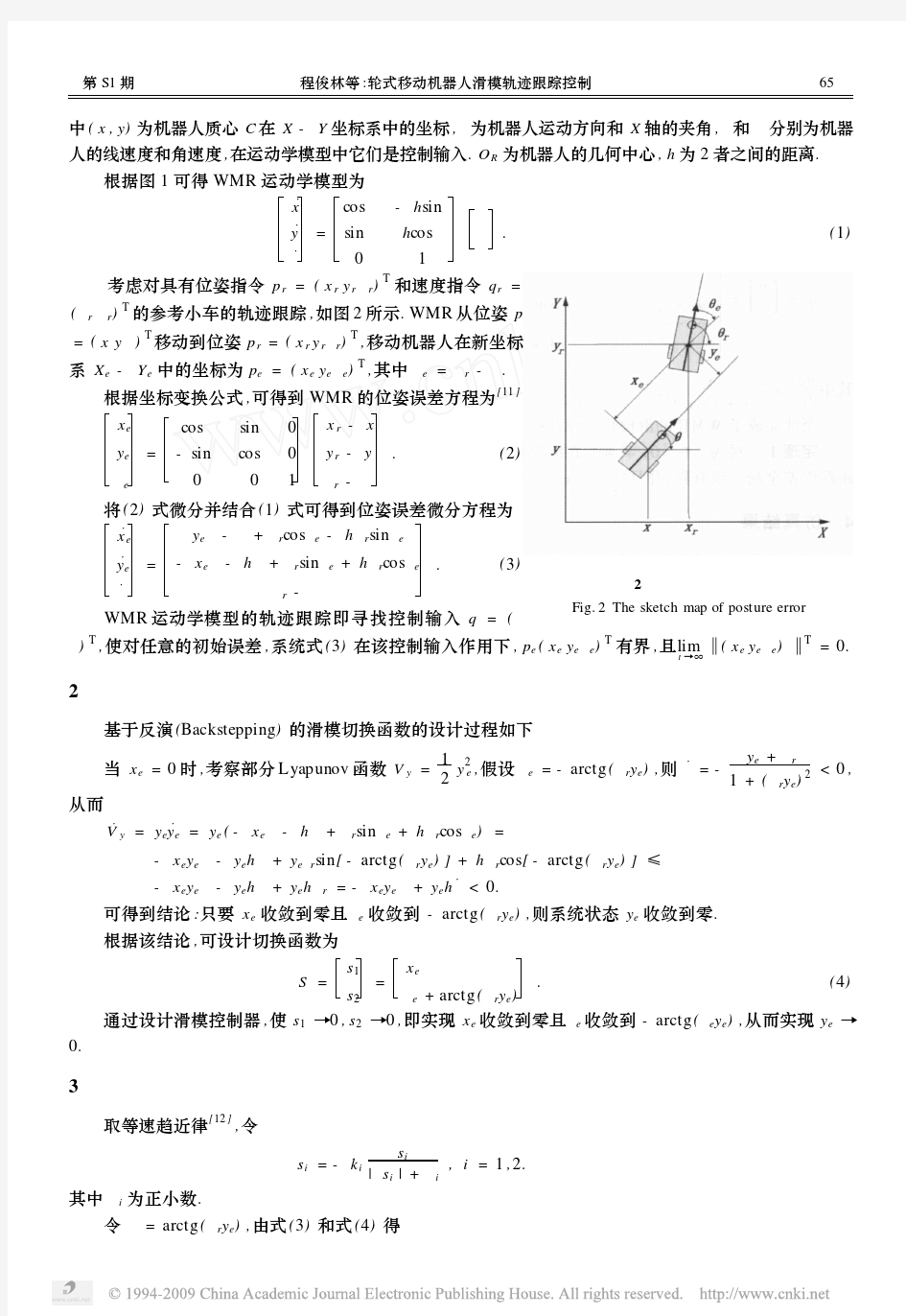
三维空间连续系统的目标轨迹预见跟踪控制 廖福成,袁晓艳 (北京科技大学应用科学学院,北京 100083) 摘要:针对连续系统已知的空间目标轨迹,把基于协调误差的空间目标轨迹最优预见跟踪控制的方法应用于连续系统,其核心是将轨迹的协调跟踪误差和轨迹的位置跟踪误差考虑成系统的状态变量,并实施最优反馈控制。仿真分析表明,该轨迹跟踪控制方法能够有效提高系统的轨迹跟踪控制精度。 关键词:协调误差;最优控制;跟踪控制;预见控制 中图分类号:TP273.1 Preview Tracking Control of Object Trajectory about Continuous system Based On Harmony Error Abstract: Aim at known space object trajectory of a Continuous system, a new preview control scheme, named optimal preview tracking control of space object trajectory based on harmony error is proposed. The highlight of the method is that harmony error and position error of tracking trajectory is put into system space state equation,which to improve the system control accuracy. The simulation result shows that the method above is valid for improving the performance of high accuracy trajectory control. Key words: harmony error ,optimal control,tracking control,preview control 在离散系统的跟踪控制中,引入已知未来目标信息可以改善系统对目标信号的跟踪性能,它对解决目标轨迹跟踪运动性能起到了良好的作用。见文[1-3]。但是,已往最优预见控制都是研究的离散系统,而对连续系统的研究却很少,三维空间目标轨迹跟踪控制研究的也是离散系统,而连续系统又有自己的有点。因此本文主要讨论了基于协调误差的三维空间连续系统的目标轨迹预见跟踪控制,主要也是同时考虑轨迹跟踪协调误差和位置协调误差的轨迹跟踪最优预见控制方法,即将系统对已知空间目标轨迹的跟踪协调误差和位置协调误差同时作为其状态变量,实施其反馈最优预见控制,从而可有效提高系统对空间目标轨迹的跟踪运动性能。 1 跟踪控制系统的构成 设在空间坐标系中连续时间系统的方程为: ()()() ()(),,, i i i i i i i i x t A x t B u t y t C x t i x y z =+ ? ? == ? (1) 其中:()n i x t R ∈是状态向量,() i y t R ∈是 输出,()m i u t R ∈是控制输入向量, ,, i i i A B C分别是,,1 n n n m n ???维的常数 矩阵。 设目标值向量为() r t,() r t是分段连续 可微的函数向量,并设从当前时刻t起() rτ() t t l τ≤≤+是可预见的,() r t在,, X Y Z 轴上的分量为(),(),() x y z r t r t r t即:
激光焊缝跟踪系统机器人用技术手册讲解
https://www.360docs.net/doc/1517655787.html, 本文由【中文word文档库】https://www.360docs.net/doc/1517655787.html,搜集整理。中文word文档库免费提供海量教学资料、行业资料、范文模板、应用文书、考试学习和社会 经济等word文档 Meta Vision Systems 机器人用激光焊缝 跟踪系统 技术手册
原作者:Jonathan Moore 翻译:Dr. Lin Sanbao (林三宝博士)
前言 尽管我们在编写这个手册时已经尽了最大努力,但是我们不接受任何由通过使用或者错误使用本手册中的信息,或者可能包含在本手册中的错误,而引发的责任和义务。本手册所提供的信息只是用于培训的目的。 英文版权所有 ? Meta Vision Systems 2000。 中文版版权所有? 中国哈尔滨AWPT-RDC联合实验室 所有权力保留,未经允许,不得以任何形式复制本手册或本手册中的任何部分。 联系方式: Meta Vision Systems Ltd. Oakfield House Oakfield Industrial Estate Eynsham Oxfordshire OX8 1TH UNITED KINGDOM Tel: +44 (0) 1865 887900 Fax: +44 (0) 1865 887901 Email: support@https://www.360docs.net/doc/1517655787.html, 中国地区: 地址:珠海市九洲大道兰埔白石路105号二楼西 邮编:519000 电话:0756 --- 8509695、8508516、6680610、6602419、6626464 传真:0756 --- 8500745 联系人:魏占静 电邮:jbw@https://www.360docs.net/doc/1517655787.html, wzj0756@https://www.360docs.net/doc/1517655787.html, 网址:https://www.360docs.net/doc/1517655787.html,
移动机器人轨迹跟踪软件设计(站点设计)(DOC)
燕山大学 课程设计说明书 题目:移动机器人轨迹跟踪软件设计(站点设计)学院(系):电气工程学院 年级专业: 10级过程控制二班 学号: 学生姓名: 指导教师:陈贵林李雅倩
燕山大学课程设计(论文)任务书
2013年11 月25 日
目录 前言……………………………………………………………………………第一章设计思路……………………………………………………………第二章程序…………………………………………………………… 第三章算法…………………………………………………………… 心得体会
前言 机器人的应用越来越广泛,几乎渗透到所有领域。移动机器人是机器人学中的一个重要分支。早在60年代,就已经开始了关于移动机器人的研究。关于移动机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式、腿式的,对于水下机器人,则是推进器。其次,必须考虑驱动器的控制,以使机器人达到期望的行为。第三,必须考虑导航或路径规划,对于后者,有更多的方面要考虑,如传感融合,特征提取,避碰及环境映射。因此,移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。对移动机器人的研究,提出了许多新的或挑战性的理论与工程技术课题,引起越来越多的专家学者和工程技术人员的兴趣,更由于它在军事侦察、扫雷排险、防核化污染等危险与恶劣环境以及民用中的物料搬运上具有广阔的应用前景,使得对它的研究在世界各国受到普遍关注 关键字:移动机器人
第一章设计思路 1.1 机器人的介绍 机器人的诞生和机器人控制技术发展作为20世纪自动控制原理最具说服力的成就、人类科学技术进步的重大成果[1],是现代计算机与自动化等技术高速发展的产物,同时也是当代最高意义上的自动化。自1956年第一台工业机器人诞生之日起,机器人的应用越来越普及。20世纪60年代末机器人开始进入商业化和工业领域以来,机器人的应用范围已经遍及到工业、国防、宇宙空间、海洋开发、医疗保健、抢险救灾等人类生活的各个方面。机器人由于具有高度的灵活性、快速的反应能力以及巨大的信息处理能力,使其能够在很多环境替代人进行工作。从重复动作的流水线机械手到智能机器人,从平地到高山海底甚至太空,以至于在比较恶劣危险的工作环境,都是机器人发挥其作用的重要舞台,然而控制系统作为机器人的心脏,其性能的好坏直接决定了机器人的智能化水平。近年来对移动机器人的研究已成为了一大热点,促进了移动机器人在各个领域中的进一步应用,本文也将在这一方面进行一些分析和研究。智能移动机器人,是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。随着机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业、农业、医疗、服务等行业中得到广泛的应用,而且在城市安全、国防和空间探测领域等有害与危险场合得到很好的应用。因此,移动机器人技术已经得到世界各国的普遍关注。 1.2 实训任务分配 本次的设计任务在老师的帮助下得到了细致地划分,而且也增加了一些项目,总体来说任务分为三大块:1.轨迹的识别与跟踪。2.站的设计。3.自定义轨迹的运行。这三部分的任务既是相互独立的又是相互联系的。 首先来分析第一个任务:轨迹的识别与跟踪,这个任务包含了摄像头的初始化以及图像的采集以及图像的存取,轨迹的识别用到了一个算法。机器人的控制也是这个任务包含的一个总要部分,其中包括了速度控制,方向控制等等。 第二个任务是站的设计,老师提到了“站”这个概念,这是在工厂的生产中的一些重要的机制,也是非常有实用性的一个设计。 第三个任务是自定义轨迹的运行,老师提到了可以设计一个圆形轨迹也可以设计一个方形轨迹,机器人的这种运动在生产生活中的应用也是很广泛的。
逐点比较法插补的连续轨迹控制设计
综合设计课程设计设计要求 1 设计要求 1.1 设计要求 (1)设计出逐点比较法插补软件流程图; (2)编写出逐点比较法插补程序; (3)要求用软件能够实现任意象限圆弧(G03)的插补计算; (4)要求软件能够处理特殊轮廓的插补,例如坐标中任意圆弧等; (5)插补结果要求能够以图形模拟进行输出。 2 设计目的 2.1 设计目的 (1)了解连续轨迹控制数控系统的组成原理; (2)了解逐点比较法插补的基本原理; (3)掌握逐点比较法插补的软件实现方法。 3 总体方案比较 3.1 各多种方案的特点 第一:采用逐点比较法插补。逐点比较法的基本原理是被控对象在按要求的轨迹运动时,每走一步都要与规定的轨迹进行比较,由此结果决定下一步移动的方向。逐点比较法既可以作直线插补又可以作圆弧插补。这种算法的特点是,运算直观,插补误差小于一个脉冲当量,输出脉冲均匀,而且输出买成速度变化小,调节方便,因此在两坐标数控机床中应用较为普遍 第二:数学积分法插补。又称为微分分析法。这种插补方法可实现一次、二次、甚至高次曲线的插补,也可以实现多坐标联动控制。只要输入不多的几个数据,就能加工出圆弧等形状较为复杂的轮廓曲线。作直线插补时,脉冲分配也较均匀。 第三:数据采样插补。数据采样插补实际上是一种粗插补过程,它所产生的微小线段仍然比较大,必须进一步对其密化(即精插补)。粗插补算法比较复杂,
综合设计课程设计多CPU结构CNC系统硬件原理图 大多用高级语言编制;精插补算法比较简单,多用汇编语言或硬件插补器实现。 3.2 方案选择 根据课题要求,对逆圆插补。根据两种方案的比较,都是很好的方法,但由于圆是二次,用采用逐点比较法插补进行设计比较方便、简单,所以根据各种插补方法的特点,选择用逐点比较法来实现。 4 多CPU结构CNC系统硬件原理图 4.1 CNC系统原理图 图4.1 共享总线的多CPU结构的CNC系统结构框图 4.2 原理图极其说明 共享总线机构,只有主模块有权控制系统的总线,在某一时刻只能有一个猪模块占有总线。共享总线结构的模块之间的通行,主要依靠存储器的实现,采用公共存储器的方式。共享存储器结构,采用多端口存储器来实现各CPU之间的互连和通信,每个端口配有一套数据、地址、控制线,以端口访问,由多端控制逻辑电路解决访问冲突。 管理模块:该模块是管理和组织整个CNC系统工作的模块,主要功能包括:初始化、中断管理、总线裁决、系统出错识别和处理、系统硬件与软件诊断等;插补模块:该模块用于在插补完成前,进行零件程序的译码、刀具补偿、坐标位移量计算、进给速度处理等预处理,然后进行插补计算,并给顶各坐标轴的位置
焊缝跟踪研究
弧焊机器人焊缝跟踪方法的研究现状 (2010-11-18 8:53:12) 95人次浏览 随着科技水平的进步,人们对焊接质量的要求也越来越高。而人工焊接时,由于受到技术水平、疲劳程度、责任心、生理极限等客观和主观因素的应影响,难以较长时间保持焊接工作的稳定性和一致性。而且,由于焊接恶劣的工作条件,愿意从事手工焊接的人在减少,熟练的技术工人更有短缺的趋势。另一方面,电子技术、计算机技术、数控及机器人技术的发展为焊接过程的自动化提供了有利的条件,并已渗透到焊接的各个领域。 近年来,焊接自动化程度在不断的增加,2000年时,中国焊接生产的机械化自动化率,按熔敷金属计算约为30%,而发达国家的焊接自动化率已经达到65%以上[1]。焊接自动化生产已是必然的趋势。焊接机器人是焊接自动化的革命性的进步,它突破了焊接刚性自动化的传统方式,开拓了一种柔性自动化的生产方式[2]。 目前,用于工业生产的弧焊机器人主要是示教再现型机器人,在机器人弧焊过程中,它们可以在其工作空间内高精度重复已经示教的动作。但这也带来一定的局限性,那就是应变能力很差,对工件的装配精度要求较严,重复性要好。如果焊接条件基本稳定,则机器人能够保证焊接质量。但在实际焊接过程中,因为机器人工作时为了避免发生危险,操作人员不准或不宜进入机器人的工作区域,使得操作者不能近距离实时监视焊接过程并作必要的调节控制,所以当实际的焊接条件发生变化时,例如焊接过程中的工件在加工、装配过程中的尺寸误差和位置偏差以及工件加热变形等因素的变化会使接头位置偏离所示教的路径,这样会造成焊接质量下降甚至失败。所以精确的焊缝跟踪是保证焊接质量的关键,它是实现焊接过程自动化的重要研究方向。 1 弧焊机器人在焊接中的应用现状 自从60年代机器人进入工业领域以来,发展较为迅速。预计从1999-2003年,世界实际装备工业机器人数量将由1999年的743,000台增加到892,000台,其中在“机器人王国”日本有370,000
激光焊接机器人焊缝跟踪方法
激光焊接机器人焊缝跟踪方法
激光焊接机器人焊缝跟踪控制方法 陈智龙 120160033 摘要:当前激光焊接机器人在实际的工业生产中应用的越来越广泛,在汽车制造业以及其他机器制造业激光焊接机器人在生产中的作用也越来越大。如何提高焊接机器人的焊缝精度问题以及控制焊缝轨迹已成为激光焊接机器人发展的首要难题。 关键词:激光焊接机器人;焊缝轨迹;控制 0引言 激光作为焊接和切割的新手段应用于工业制造,具有很大发展潜力。在国际汽车工业领域,激光加工技术已广泛得到了应用,激光切割与焊接逐渐成为标准的汽车车身生产工艺.国内也已积极推广应用,但目前主要还是以引进成套激光加工设备为主,用于激光钎焊、激光渗透焊、激光对接焊、白车身激光三维切割和激光金属零件表面热处理[1]. 由于成本考虑,有些汽车厂家则直接进口国外激光加工的零部件.为提升我国汽车制造的技术能力,我们应依靠国内技术能力,自主创新,在更广范围和更深层次上,加快激光加工在制造业的应用发展.车身在整车制造中占有重要地位,不仅车身成本占整车的40%~50﹪,而且对汽车安全、节能、环保和快速换型有重要影响。 人口老龄化不断逼近,各制造业工厂着手进行技术改造工程设计,采用了许多工业机器人,以提高生产线的柔性程度为基础,为制造厂家提供了生产产品多样化,更新转型的可能性.以上汽大众汽车车 身生产车间为例,机器人能独立完成工件的移动搬运、输送、组装夹紧定位,可完成工件的点焊、弧焊、激光焊、打磨、滚边、涂胶等工作.有的工位上把上件、夹具、工具以机器人为中心布置,以便机器人能完成多个工序,实现多品种、不同批量的生产自动化.采用机器人使焊接生产线更具柔性化、自动化,使多种车身成品可在一条车身装焊生产线上制造,实现多车型混线生产.因此,焊接生产线必须很容易地因产品结构、外形的改变而改变,具有较高的柔性程度[2] 。 由于柔性车身焊接生产线可以适应汽车多品种生产及换型的需要,是汽车车身制造自动化的必然趋势,特别是进入上世纪90年代以后,各大汽车厂家都
逐点比较法插补的连续轨迹控制设计
厦门海洋职业技术学院 学生课程设计 题目:逐点比较法圆弧插补的连续轨迹 控制设计 学生姓名:廖晨杰 所在院(系) 机电系 专业:数控技术 班级:数控2111 指导教师:杨光 2013年月日
目录 1.设计要求 (3) 2.设计目的 (3) 3.总体比较法 (3) 4.多CPU结构CNC系统硬件原理图 (4) 5.逐点比较法直线插补原理 (5) 6.软件构成设计 (9) 7.程序代码设计 (12) 8.参考文献 (17) 9.设计小结 (17)
1 设计要求 1.1 设计要求 (1)设计出逐点比较法插补软件流程图; (2)编写出逐点比较法插补程序; (3)要求用软件能够实现任意象限圆弧(G03)的插补计算; (4)要求软件能够处理特殊轮廓的插补,例如坐标中任意圆弧等; (5)插补结果要求能够以图形模拟进行输出。 2 设计目的 2.1 设计目的 (1)了解连续轨迹控制数控系统的组成原理; (2)了解逐点比较法插补的基本原理; (3)掌握逐点比较法插补的软件实现方法。 3 总体方案比较 3.1 各多种方案的特点 第一:采用逐点比较法插补。逐点比较法的基本原理是被控对象在按要求的轨迹运动时,每走一步都要与规定的轨迹进行比较,由此结果决定下一步移动的方向。逐点比较法既可以作直线插补又可以作圆弧插补。这种算法的特点是,运算直观,插补误差小于一个脉冲当量,输出脉冲均匀,而且输出买成速度变化小,调节方便,因此在两坐标数控机床中应用较为普遍 第二:数学积分法插补。又称为微分分析法。这种插补方法可实现一次、二次、甚至高次曲线的插补,也可以实现多坐标联动控制。只要输入不多的几个数据,就能加工出圆弧等形状较为复杂的轮廓曲线。作直线插补时,脉冲分配也较均匀。 第三:数据采样插补。数据采样插补实际上是一种粗插补过程,它所产生的微小线段仍然比较大,必须进一步对其密化(即精插补)。粗插补算法比较复杂,
连续运动轨迹插补原理
连续运动轨迹插补原理文件排版存档编号:[UYTR-OUPT28-KBNTL98-UYNN208]
连续运动轨迹插补原理连续运动轨迹控制是诸如数控机床、机器人等机械的一种典型运动方式,这种控制在本质上属于位置伺服系统。以数控机床为例,其控制目标是被加工的曲线或曲面(即轮廓),所以可称之为轮廓控制。如果将被加工的轮廓作为控制器的给定输入,在运动过程中随时根据轮廓参数求解刀具的轨迹和加工的误差,并在求解的基础上决定如何动作,其计算的实时性有难以满足加工速度的需求。因此在实际工程应用中采用的方法是预先通过手工或自动编程,将刀具的连续运动轨迹分成若干段(即数控技术中的程序段),而在执行程序段的过程中实时地将这些轨迹段用指定的具有快速算法的直线、圆弧或其他标准曲线予以逼近。加工程序以被加工的轮廓为最终目标,协调刀具运动过程中各坐标上的动作。加工程序的编制必须考虑诸多约束条件,主要有加工精度、加工速度和刀具半径等。加工程序本质上就是对刀具的连续运动轨迹及其运动特性的一个描述。所以轮廓控制又可称为连续运动轨迹控制。 数控技术一般以标准的格式对程序段进行描述,例如程序段“N15 G02 Xlo Y25 120 JOF125 LF”就规定了一个以(10,25)为起点,在X-Y平面上以150mm/min 的进给速度顺时针加工一个半径为20mm的整圆的过程。程序段只提供了有限的提示性信息(例如起点、终点和插补方式等),数控装置需要在加工过程中,根据这些提示并运用一定的算法,自动地在有限坐标点之间生成一系列的中间点坐标数据,并使刀具及时地沿着这些实时发生的坐标数据运动,这个边计算边执行的逼近过程就称为插补(interpolation)。上述程序段中的准备 功能G02就指定了该程序段的执行要采用顺时针方向的圆弧插补。
弧焊机器人焊缝跟踪方法的研究现状
弧焊机器人焊缝跟踪方法的研究现状 摘要:本文首先对在工业中的应用情况作了简要的介绍,然后较全面的介绍了弧焊机器人的各种焊缝跟踪方法,重点论述了视觉方法在焊缝跟踪中的研究现状。关键词:弧焊机器人焊缝跟踪研究现状 前言 随着科技水平的进步,人们对焊接质量的要求也越来越高。而人工焊接时,由于受到技术水平、疲劳程度、责任心、生理极限等客观和主观因素的应影响,难以较长时间保持焊接工作的稳定性和一致性。而且,由于焊接恶劣的工作条件,愿意从事手工焊接的人在减少,熟练的技术工人更有短缺的趋势。另一方面,电子技术、计算机技术、数控及机器人技术的发展为焊接过程的自动化提供了有利的条件,并已渗透到焊接的各个领域。 近年来,焊接自动化程度在不断的增加,2000年时,中国焊接生产的机械化自 动化率,按熔敷金属计算约为30%,而发达国家的焊接自动化率已经达到65%以上[1]。焊接自动化生产已是必然的趋势。焊接机器人是焊接自动化的革命性的进步,它突破了焊接刚性自动化的传统方式,开拓了一种柔性自动化的生产方式[2]。 目前,用于工业生产的弧焊机器人主要是示教再现型机器人,在机器人弧焊过程中,它们可以在其工作空间内高精度重复已经示教的动作。但这也带来一定的局限性,那就是应变能力很差,对工件的装配精度要求较严,重复性要好。如果焊接条件基本稳定,则机器人能够保证焊接质量。但在实际焊接过程中,因为机器人工作时为了避免发生危险,操作人员不准或不宜进入机器人的工作区域,使得操作者不能近距离实时监视焊接过程并作必要的调节控制,所以当实际的焊接条件发生变化时,例如焊接过程中的工件在加工、装配过程中的尺寸误差和位置偏差以及工件加热变形等因素的变化会使接头位置偏离所示教的路径,这样会造成焊接质量下降甚至失败。所以精确的焊缝跟踪是保证焊接质量的关键,它是实现焊接过程自动化的重要研究方向。 1 弧焊机器人在焊接中的应用现状 自从60年代机器人进入工业领域以来,发展较为迅速。预计从1999-2003年,世界实际装备工业机器人数量将由1999年的743,000台增加到892,000台,其中在“机器人王国”日本有370,000台,世界其他地区通用工业机器人的实际装备数量将由340,000台增加到508,000台。在美国,实际装备通用工业机器人的数量2003年将达到155,000台,欧洲达到262,000台[3] ,其中半数以上为焊接机器人。 焊接是工业机器人应用最重要的领域之一,随着国外对工业机器人在焊接方面的研究应用,我国也开始了焊接机器人的研究应用。在数量上,根据到2001年的统计,全国共有焊接机器人1040台(不包括港、澳、台),其中弧焊机器多于点焊机器人。汽车制造和汽车零部件生产企业中的焊接机器人占全部焊接机器人的
激光跟踪焊接机器人系统技术方案
顺开机械手弧焊工作站 技术方案 沈阳新松机器人自动化股份有限公司 2009年7月
第一章方案概述 1.方案设计依据 甲方所提出的要求以及图片; 2.项目条件和要求 ?焊接工件名称:箱体总成最大 1000mm*1000mm*1800mm(W*L*H)(长度、宽度和 高度均有变化)。 ?材料:不锈钢;厚度:δ=3 mm; ?焊接方法:机器人MAG焊接方式; ?设备规划: 配置1套机器人及MAG焊接系统、1套机器人滑台、1台单轴变位机,1套机器人焊接夹具,激光检测和跟踪系统等。具体见设备布局参考图。 第二章焊接工艺分析 1.箱体工序划分: 工序1、人工点固工件(组焊夹具甲方设计制造,甲方自备焊接设备,箱体共4个部件); 示图:
工序2、人工将工件装在变位机夹具上,机器人焊接。焊接完成后人工卸件。 示图:机器人焊接如图所示的焊缝 2.焊接工艺(MAG): 1)焊丝直径选用Φ0.8-Φ1.0mm; 2)机器人MIG焊接的平均焊接速度取:6-8 mm/秒; 3)每条焊缝的机器人焊接辅助时间,即机器人平均移动时间取:3秒(包括机器 人变换姿态、加减速、空程运动时间,及焊接起弧、收弧时间); 第三章系统总体方案 1.方案总体介绍 本方案采用KUKA KR16L/6机器人和弗尼斯的TPS4000焊接系统,通过sevorobot 的DIGI-I激光传感器检测焊缝的位置进行焊接,并增加激光跟踪系统随时对焊接进行修正。 机器人夹具放在单轴变位机上,机器人安装在外部轴滑台上,保证焊接的姿态。 经过仿真:目前需用的机器人基本上可以满足最长1800的焊接。 关于夹具能适应多品种的问题:目前认为一套夹具可以通用,由于工件宽度及高度变动范围太大,为了适应有些型号的工件焊接,需要手工更换夹具上的部分底座。
弧焊机器人焊缝跟踪方法的分析研究现状
弧焊机器人焊缝跟踪方法的研究现状 发布时间:2018-04-09 摘要:近年来,焊接自动化程度在不断的增加,2000年时,中国焊接生产的机械化自动化率,按熔敷金属计算约为30%,而发达国家的焊接自动化率已经达到65%以上[1]。焊接自动化生产已是必然的趋势。焊接机器人是焊接自动化的革命性的进步,它突破了焊接刚性自动化的传统方式,开拓了一种柔性自动化的生产方式[2]。 近年来,焊接自动化程度在不断的增加,2000年时,中国焊接生产的机械化自动化率,按熔敷金属计算约为30%,而发达国家的焊接自动化率已经达到65%以上[1]。焊接自动化生产已是必然的趋势。焊接机器人是焊接自动化的革命性的进步,它突破了焊接刚性自动化的传统方式,开拓了一种柔性自动化的生产方式[2]。目前,用于工业生产的弧焊机器人主要是示教再现型机器人,在机器人弧焊过程中,它们可以在其工作空间内高精度重复已经示教的动作。但这也带来一定的局限性,那就是应变能力很差,对工件的装配精度要求较严,重复性要好。如果焊接条件基本稳定,则机器人能够保证焊接质量。但在实际焊接过程中,因为机器人工作时为了避免发生危险,操作人员不准或不宜进入机器人的工作区域,使得操作者不能近距离实时监视焊接过程并作必要的调节控制,所以当实际的焊接条件发生变化时,例如焊接过程中的工件在加工、装配过程中的尺寸误差和位置偏差以及工件加热变形等因素的变化会使接头位置偏离所示教的路径,这样会造成焊接质量下降甚至失败。所以精确的焊缝跟踪是保证焊接质量的关键,它是实现焊接过程自动化的重要研究方向。1 弧焊机器人在焊接中的应用现状自从60年代机器人进入工业领域以来,发展较为迅速。预计从1999-2003年,世界实际装备工业机器人数量将由1999年的743,000台增加到892,000台,其中在“机器人王国”日本有370,000台,世界其他地区通用工业机器人的实际装备数量将由340,000台增加到508,000台。在美国,实际装备通用工业机器人的数量2003年将达到155,000台,欧洲达到262,000台[3] ,其中半数以上为焊接机器人。焊接是工业机器人应用最重要的领域之一,随着国外对工业机器人在焊接方面的研究应用,我国也开始了焊接机器人的研究应用。在数量上,根据到2001年的统计,全国共有焊接机器人1040台(不包括港、澳、台>,其中弧焊机器多于点焊机器人。汽车制造和汽车零部件生产企业中的焊接机器人占全部焊接机器人的76%,是我国焊接机器人最主要的用户。汽车制造厂的点焊机器人多,弧焊机器人少。而汽车零部件厂则相反[4] 。焊接机器人的技术水平在不断的进步,目前,焊接机器人几乎全部采用交流伺服电机驱动,这种电机因为没有电刷,故障率很低。控制器中普遍采用32位的计算机,除可以控制机器人本体的5-6个轴外,还可以使外围设备和机器人协调联动。在2004年的中国焊接会议上,日本安川公司的新型焊接机器人控制器NX100技术中,一台控制器能同时控制四台机器人共36轴(每台机器人有本体6个轴,3个外部轴>,并且使用软PLC对周围装置进行控制。示教盒也采用了功能强大的Windows CE操作系统。配套焊接系统也有很多新的进展,在1993年的埃森展览会上,日本松下公司把旋转电弧焊技术用于弧焊机器人。由于采用旋转电弧焊时,焊丝能够以50HZ以上的频率旋转,所以用这种技术进行焊缝跟踪时,其跟踪精度比机器人经常采用的摆动焊(摆动频率小于10HZ>要高的多。该公司还于1993年首先销售在控制柜中内藏焊机的机器人,依靠数字通讯技术实现焊机和机器人的
基于PC运动控制器的多轴连续运动轨迹控制
万方数据
万方数据
基于PC运动控制器的多轴连续运动轨迹控制 作者:田小静, 陈煜蒙, Tian Xiaojing, Chen Yumeng 作者单位:西安航空职业技术学院,西安,710089 刊名: 价值工程 英文刊名:Value Engineering 年,卷(期):2012,31(11) 本文读者也读过(10条) 1.李松.肖金壮.王洪瑞基于X—Y平台的平面轨迹控制的研究[期刊论文]-数字技术与应用2012(1) 2.王凤爱.李成营.周杰SurfCAM 2000在四轴数控加工中的应用[期刊论文]-CAD/CAM与制造业信息化2005(2) 3.何小妹.丁洪生.付铁.孙厚芳基于PMAC的BKX-Ⅰ型变轴数控机床数据通讯及数控加工的实现[期刊论文]-组合机床与自动化加工技术2004(9) 4.杨大勇.曹凤国.Yang Dayong.Cao Fengguo电火花成形机高性能柔性化多轴联动数控系统的研究[期刊论文]-电加工与模具 2005(6) 5.尚可超基于PC的五轴联动数控系统的设计[期刊论文]-煤矿机械2001(7) 6.庞长江.陈焕章.徐旋波基于PC数控系统的开发[期刊论文]-机电工程技术2003,32(3) 7.富历新.肖蕾.董春低成本的开放型八轴运动控制器[期刊论文]-制造技术与机床2001(1) 8.谷安.刘正埙电火花成型机数控系统的研究[期刊论文]-南京航空航天大学学报2002,34(4) 9.赵东林.方凯.钱伟.郑晓锋.黄迎华.ZHAO Dong-lin.FANG Kai.QIAN Wei.ZHENG Xiao-feng.HUANG Ying-hua三轴机床数控系统软件的设计与开发[期刊论文]-组合机床与自动化加工技术2006(9) 10.何赛松.徐雷.HE Sai-song.XU Lei PLC与PC机的串行通讯在数控管切割机中的应用[期刊论文]-机械设计与制造2012(1) 本文链接:https://www.360docs.net/doc/1517655787.html,/Periodical_jzgc201211011.aspx
激光焊接机器人焊缝跟踪方法
激光焊接机器人焊缝跟踪控制方法 陈智龙120160033 摘要:当前激光焊接机器人在实际的工业生产中应用的越来越广泛,在汽车制造业以及其他机器制造业激光焊接机器人在生产中的作用也越来越大。如何提高焊接机器人的焊缝精度问题以及控制焊缝轨迹已成为激光焊接机器人发展的首要难题。 关键词:激光焊接机器人;焊缝轨迹;控制 0引言 激光作为焊接和切割的新手段应用于工业制造,具有很大发展潜力。在国际汽车工业领域,激光加工技术已广泛得到了应用,激光切割与焊接逐渐成为标准的汽车车身生产工艺.国内也已积极推广应用,但目前主要还是以引进成套激光加工设备为主,用于激光钎焊、激光渗透焊、激光对接焊、白车身激光三维切割和激光金属零件表面热处理[1]. 由于成本考虑,有些汽车厂家则直接进口国外激光加工的零部件.为提升我国汽车制造的技术能力,我们应依靠国内技术能力,自主创新,在更广范围和更深层次上,加快激光加工在制造业的应用发展.车身在整车制造中占有重要地位,不仅车身成本占整车的40%~50﹪,而且对汽车安全、节能、环保和快速换型有重要影响。 人口老龄化不断逼近,各制造业工厂着手进行技术改造工程设计,采用了许多工业机器人,以提高生产线的柔性程度为基础,为制造厂家提供了生产产品多样化,更新转型的可能性.以上汽大众汽车车 身生产车间为例,机器人能独立完成工件的移动搬运、输送、组装夹紧定位,可完成工件的点焊、弧焊、激光焊、打磨、滚边、涂胶等工作.有的工位上把上件、夹具、工具以机器人为中心布置,以便机器人能完成多个工序,实现多品种、不同批量的生产自动化.采用机器人使焊接生产线更具柔性化、自动化,使多种车身成品可在一条车身装焊生产线上制造,实现多车型混线生产.因此,焊接生产线必须很容易地因产品结构、外形的改变而改变,具有较高的柔性程度[2] 。 由于柔性车身焊接生产线可以适应汽车多品种生产及换型的需要,是汽车车身制造自动化的必然趋势,特别是进入上世纪90年代以后,各大汽车厂家都在考虑车身焊接生产线柔性化。 1激光焊接与自动控制技术 焊接机器人在汽车装焊生产线上采用的数量及机器人类型(载荷能力、自由度数、工作方式等),反映焊接生产线柔性程度和生产水平。为充分发挥激光加工精益、敏捷和柔性的技术优势,基于激光的安全特性,以工业机器人为基础,将激光设备与工业机器人、安全工作场所进行软硬件耦合是激光技术工业应用的解决方案。 在汽车生产工厂,一个比较完整的激光焊工位包含的主要设备有8种:Laserline激光源、Fnius送丝机构、高精度KUKA机器人、Scansonic-ALO自适应激光加工镜头、QS400激光加工镜组防撞系统、LLK激光光缆、Rediel加工镜头
机器人焊接智能化技术
1. 引言 随着先进制造技术的发展,实现焊接产品制造的自动化、柔性化与智能化已成为必然趋势[1 -8]。目前,采用机器人焊接已成为焊接自动化技术现代化的主要标志。焊接机器人由于具有通用性强、工作可靠的优点,受到人们越来越多的重视。在焊接生产中采用机器人技术,可以提高生产率、改善劳动条件、稳定和保证焊接质量、实现小批量产品的焊接自动化[9]。 从60年代诞生和发展到现在,焊接机器人的研究经历了三个阶段,即示教再现阶段、离线编程阶段和自主编程阶段。随着计算机控制技术的不断进步,使焊接机器人由单一的单机示教再现型向多传感、智能化的柔性加工单元(系统)方向发展,实现由第二代向第三代的过渡将成为焊接机器人追求的目标[9,10]。 目前,国内外大量应用弧焊机器人系统从整体上看基本都属于第一代或准二代的焊接由于焊接路径和焊接参数是根据实际作业条件预先设置的,在焊接时缺少外部信息传感和实时调整控制功能,这类弧焊机器人对焊接作业条件的稳定性要求严格,焊接时缺乏“柔性”,表现出明显的缺点。在实际弧焊过程中,焊接条件是经常变化的,如加工和装配上的误差会造成焊缝位置和尺寸的变化,焊接过程中工件受热及散热条件改变会造成焊道变形和熔透不均[9,1 2]。为了克服机器人焊接过程中各种不确定性因素对焊接质量的影响,提高机器人作业的智能化水平和工作的可靠性,要求弧焊机器人系统不仅能实现空间焊缝的自动实时跟踪,而且还能实现焊接参数的在线调整和焊缝质量的实时控制。 2. 机器人焊接智能化技术的主要构成
现代焊接技术具有典型的多学科交叉融合特点[5,11],采用机器人焊接则是相关学科技术成果的集中体现。将智能化技术引入焊接机器人所涉及的主要技术构成可见图1 所示。其中包括: 1)焊接机器人对于焊接任务的自主规划技术; 2)焊接机器人的运动轨迹控制技术; 3)焊接动态过程的信息传感、建模与智能控制技术; 4)机器人焊接系统的集成与控制,将上述焊接任务规划、轨迹跟踪控制、传感系统、过程模型、智能控制等子系统的软硬件集成设计、统一优化调度与控制,涉及焊接柔性制造系统的物料流、信息流的管理与控制,多机器人与传感器、控制器的多智能单元与复杂系统的控制等。 下面对以上相关方面的主要技术研究与发展现状分别作简要叙述。