题目悬挂运动控制系统
题目一、悬挂运动控制系统
一、任务
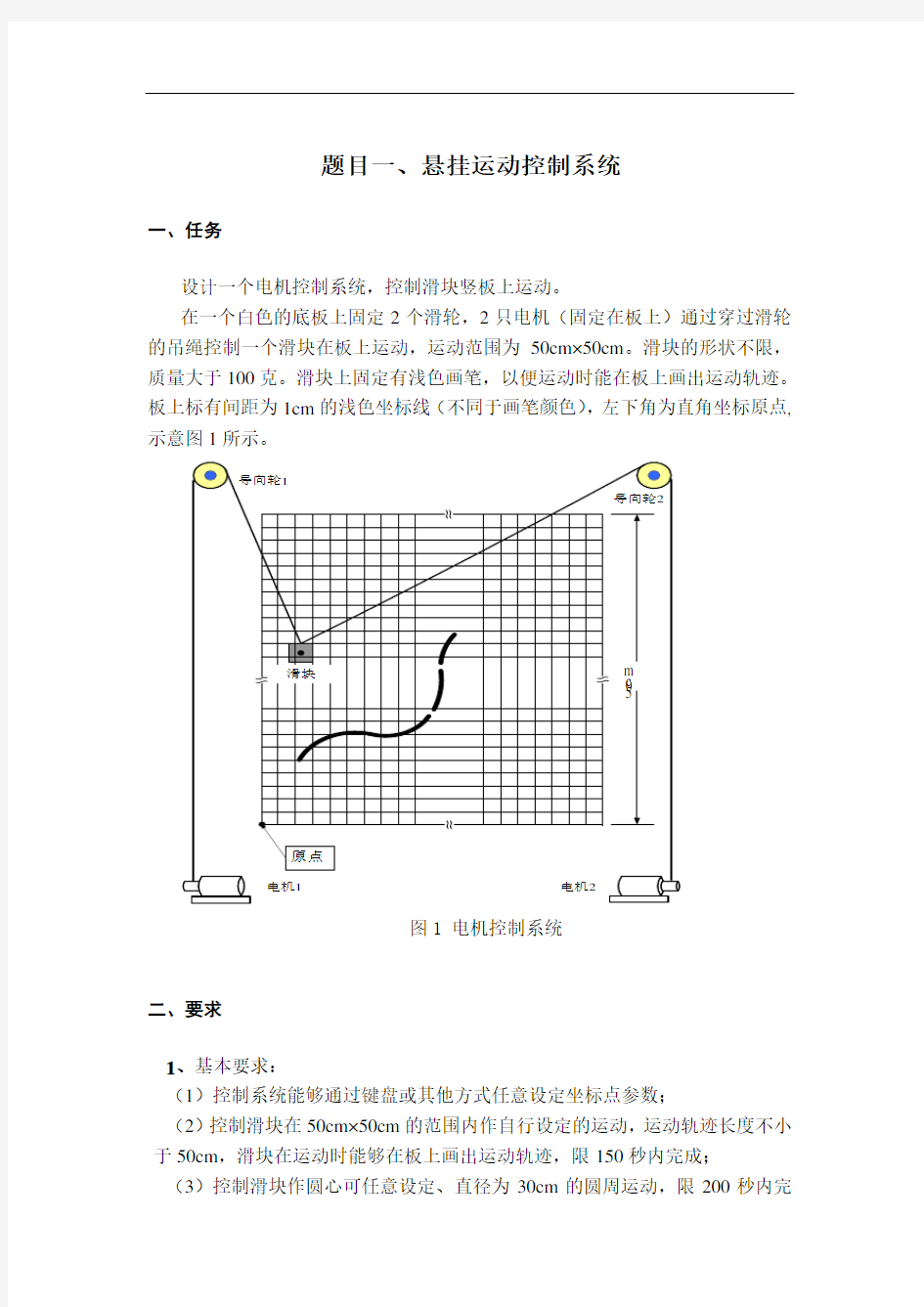
设计一个电机控制系统,控制滑块竖板上运动。
在一个白色的底板上固定2个滑轮,2只电机(固定在板上)通过穿过滑轮的吊绳控制一个滑块在板上运动,运动范围为50cm×50cm。滑块的形状不限,质量大于100克。滑块上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图1所示。
图1 电机控制系统
二、要求
1、基本要求:
(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;
(2)控制滑块在50cm×50cm的范围内作自行设定的运动,运动轨迹长度不小于50cm,滑块在运动时能够在板上画出运动轨迹,限150秒内完成;
(3)控制滑块作圆心可任意设定、直径为30cm的圆周运动,限200秒内完
成;
(4)滑块从左下角坐标原点出发,在100秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。
2、发挥部分
(1)能够显示滑块中画笔所在位置的坐标;
(2)控制滑块沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在150秒内完成,沿间断曲线运动限定在300秒内完成;(3)控制滑块在板上绘出一个数字字符,如“2”、“3”、“5”“6”、“8”、“9”等,限定在300秒内完成;
(4)其他。
三、评分标准
四、说明
(1)滑块的运动轨迹以画笔画出的痕迹为准,应尽量使滑块运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;
(2)若在某项测试中运动超过限定的时间,该项目不得分;
(3)运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分;
(4)在基本要求(3)、(4)和发挥部分(2)、(3)中,滑块开始运动前,允许手动将滑块定位;开始运动后,不能再人为干预滑块运动。
题目二、行走江湖
一、任务
图1为边长为100cm的区域,A、B、C、D分别为其4个顶点。设计2个自主行走的装置X和Y,在区域ABCD中活动,区域边界用标记标明。
D
A
B C
图1 行走区域
二、要求
1、基本要求:
(1)查看保护区域。行走装置X和Y从顶点A出发,分别朝C和D 方向行走,在最短的时间内在C点汇合。
(2)返回总舵。把行走装置X置于顶点A,行走装置Y置于顶点C,Y沿CA方向在最短的时间内返回顶点A,Y到达后,X退出A点把其位置让与Y。CA方向不能设置地面引导线或色带等导引装置。
(3)相会于江湖。把行走装置X置于顶点A,行走装置Y置于顶点C,X、Y沿AC方向相向而行,在最短的时间内在AC之间某点相会,然后停车。AC 方向不能设置地面引导线或色带等导引装置。。
2、发挥部分
(1)兄弟行走江湖。把行走装置X置于顶点A,行走装置Y置于顶点C,X、Y沿AC方向相向而行,在AC之间某点相会后,停车3秒,然后结伴相随,同向而行,X、Y行走装置相随朝顶点D运动,依次通过顶点D,停车。ABCD
区域范围中不得设置地面引导传导线或色带等引导装置。
(2)笑傲江湖。把行走装置X置于顶点A,行走装置Y置于顶点C,X、Y 沿AC方向相向而行,在AC之间某点相会后停车3秒,然后分道扬镳、相背而行, X行走装置朝顶点D运动,Y行走装置相随朝顶点B运动,各次通过目的顶点后停车。ABCD区域范围中不得设置地面引导传导线或色带等引导装置。(3)其他。
三、评分标准
四、说明
(1)边界可以用色带设置,顶点可以设置各种非接触式引导装置;
(2)测试时,以完成时间为评分标准;
(3)到达顶点的偏差超过25cm时,该项目不得分;
(4)行走状开始运动前,允许手动将其定位;开始运动后,不能再人为干预其运动。
题目悬挂运动控制系统
题目一、悬挂运动控制系统 一、任务 设计一个电机控制系统,控制滑块竖板上运动。 在一个白色的底板上固定2个滑轮,2只电机(固定在板上)通过穿过滑轮的吊绳控制一个滑块在板上运动,运动范围为50cm×50cm。滑块的形状不限,质量大于100克。滑块上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图1所示。 图1 电机控制系统 二、要求 1、基本要求: (1)控制系统能够通过键盘或其他方式任意设定坐标点参数; (2)控制滑块在50cm×50cm的范围内作自行设定的运动,运动轨迹长度不小于50cm,滑块在运动时能够在板上画出运动轨迹,限150秒内完成; (3)控制滑块作圆心可任意设定、直径为30cm的圆周运动,限200秒内完
成; (4)滑块从左下角坐标原点出发,在100秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。 2、发挥部分 (1)能够显示滑块中画笔所在位置的坐标; (2)控制滑块沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在150秒内完成,沿间断曲线运动限定在300秒内完成;(3)控制滑块在板上绘出一个数字字符,如“2”、“3”、“5”“6”、“8”、“9”等,限定在300秒内完成; (4)其他。 三、评分标准 四、说明 (1)滑块的运动轨迹以画笔画出的痕迹为准,应尽量使滑块运动轨迹与预期轨迹吻合,同时尽量缩短运动时间; (2)若在某项测试中运动超过限定的时间,该项目不得分; (3)运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分; (4)在基本要求(3)、(4)和发挥部分(2)、(3)中,滑块开始运动前,允许手动将滑块定位;开始运动后,不能再人为干预滑块运动。
E悬挂运动控制系统(E题)
悬挂运动控制系统(E题) 一、任务 设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。 在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。物体的形状不限,质量大于100克。物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。 二、要求 1、基本要求: (1)控制系统能够通过键盘或其他方式任意设定坐标点参数; (2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成; (3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;
(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。 2、发挥部分 (1)能够显示物体中画笔所在位置的坐标; (2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽 1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约 30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连 续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。 三、评分标准 四、说明 1、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合, 同时尽量缩短运动时间; 2、若在某项测试中运动超过限定的时间,该项目不得分; 3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分; 4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开 始运动后,不能再人为干预物体运动; 5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸) 测试 时自带。
悬挂运动控制系统
2015年全国大学生电子设计竞赛 论文 X题:悬挂运动控制系统 2015年8月15日
悬挂运动控制系统(E题) 摘要 本设计使用AT89S52单片机作为悬挂运动控制系统的核心,硬件电路包含液晶显示和键盘处理模块,步进电机驱动模块,黑线循迹检测模块,数据传输模块等几部分。液晶显示屏负责显示系统状态和控制命令,调试时还可以方便的显示每个红外传感器的状态;键盘接收输入的控制指令;电机驱动采用脉宽调制技术,可灵活方便地控制两个步进电机;反射式红外传感器模块在循迹时检测引导黑线;数据传输模块上的AT89C2051单片机将红外传感器状态信息通过串行口传送至AT89S52控制核心,使之能根据程序算法驱动两个步进电机带动悬挂物按要求运动并同时显示各种状态数据。 关键词:步进电机,脉宽调制,红外传感器,循迹,算法 Abstract In this design,the control kernel of this hanging movement system is based on a MCU chip AT89S52.The hole hardware circuit is composed of the following modules:LCD display and keyboard module,step motors drive module,track detecting module and data transfer module.The LCD displays system status,command and also the status of infrared sensors when debugging.The keyboard receives user’s command.The motors drive module adopts PWM technology to control motors’ status flexibly and conveniently.The reflecting infrared sensors detect black lines when tracking.The AT89C2051 on the data transfer module transfers data to AT89S52 through UART so as to make motors work properly according to program algorithm and display status data needed. Keywords: step motor,PWM,infrared sensor,tracking,algorithm
基于单片机的悬挂运动控制系统毕业设计开题报告
吉林建筑大学城建学院 毕业设计开题报告 所学专业:电气信息工程及其自动化 学生姓名: 指导教师: 论文题目:基于单片机的悬挂运动控制系统设计开题报告日期:2015.3.30
说明 1、开题报告由毕业生本人在完成文献阅读、科研调查的基础上,并通过开题报 告评议后填写。 2、本报告一式两份。一份交学院作为论文检查的依据;一份答辩后作为档案材 料归入学位档案。 3、开题报告用A4纸打印,不需标注页码。报告内容字体一律使用宋体小四, 行间距为1.25倍。
一、课题来源及研究的目的和意义 课题来源:生产 研究的目的: 科技的进步以及人们生活水平的逐步提高,各种方便于生活的自动控制开始进入了人们的生活,以单片机为核心的悬挂运动自动控制系统就是其中之一。在现代的工业控制、车辆运动和医疗设备等系统中,悬挂运动系统的应用越来越多,在这些系统中悬运动部件通常是具体的执行机构,因而悬挂部件的运动精确性是整个系统工作效能的决定因素,而在实际中实现悬挂运动控制系统的精确控制是非常困难的。靠改变悬挂被控对象的绳索长短来控制被控对象运动轨迹的悬挂运动控制系统,在生产控制等领域有很广的应用范围,但受技术上的制约,使用也有一定限制。采用单片机作为系统控制器。单片机可以实现各种复杂的逻辑功能,规模大,集成度高,体积小,稳定性好,并且可利用单片机软件进行仿真和调试。单片机采用并行工作方式,提高了系统的处理速度,常用于大规模实时性要求较高的系统。 研究的意义: 运动控制是自动化技术的重要组成部分,是机器人等高技术领域的技术基础,已取得了广泛的工程应用。运动控制集成了电子技术、电机拖动、计算机控制技术等内容。自二十世纪八十年代初期,运动控制器已经开始在国外多个行业应用,尤其是在微电子行业的应用更加广泛。而当时运动控制器在我国的应用规模和行业面很小,国内也没有厂商开发出通用的运动控制器产品。在现代的工业控制、车辆运动和医疗设备等系统中,悬挂运动控制系统的应用越来越多,在这些系统中悬挂运动部件通常是具体的执行机构,因此悬挂部件的运动精确性是整个系统工作效能的决定因素。靠改变悬挂被控对象的绳索长短来控制被控对象运动轨迹的悬挂运动控制系统,在生产控制等领域有很广的应用范围。
悬挂运动控制系统(E题)设计报告之欧阳家百创编
悬挂运动控制系统(E题)设计报告 欧阳家百(2021.03.07) 摘要:本悬挂控制系统是一个电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。设计采用AT89S52单片机作为核心控制器件,采用57BYG007-4型步进电机和高细分步进电机驱动器SM-60作为动力装置,采用红外反射式光电传感器实现画板上黑色线寻迹检测,显示部分用液晶显示模块LCD1602实现。 关键词:悬挂控制、单片机、步进电机、红外反射式光电传感器 一、设计要求 1、任务 设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。 在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。物体的形状不限,质量大于100克。物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。 2、基本要求: (1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成; (3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成; (4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。 3、发挥部分 (1)能够显示物体中画笔所在位置的坐标; (2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽 1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长
悬挂运动控制系统论文
悬挂运动控制系统 【摘要】本系统采用凌阳16位单片机SPCE061A作为控制中心,由直流步进电机、红外收发对管、4*4键盘及中文液晶显示屏构成的悬挂运动控制系统。该系统能自由控制悬挂物体完成自行设定运动、画圆运动、沿黑线运动等,并能正确显示物体到达的坐标位置。 【关键词】SPCE061A单片机中文液晶显示屏逼近画圆算法 A Control System For Suspension Movement [Abstract]This design uses SPCE061A as the control core to build a suspension movement control system which consists of a DC step motor, infrared emitting tube, 4X4 keyboard and an LCD display screen for Chinese characters. The system can control the suspended objects to complete the movements set by itself, such as drawing the circles, moving along the black lines and doing other movements. It also can display the correct location of the coordinate where the object reaches. Key words: SPCE061A Single chip, Chinese characters LCD, Closing Algorithm for circle drawing 一、方案的选择与论证
悬挂运动控制系统设计说明
悬挂运动控制系统(E题) 摘要 本系统在嵌入式操作系统基础上,使用两块单片机协调工作,对悬挂物体的运动进行实时控制。系统通过两个步进电机的配合完成了平面任意曲线运动,通过光电传感器配合循迹算法迅速有效地完成了循迹运动。运动的精度为毫米级,过渡时间不超过1分钟。同时,使用了点阵式LCD配合PS/2鼠标等外围设备,提供了良好的交互界面。 Abstract This design bases on an embedded operating system, and uses two pieces of SCM t o take real time control of a suspender’s movement in a planar plane. The system can move in any designed way with the cooperation of two step-motors, and do a quick tracing movement because of a special arithmetic, which is based on an array of photoelect ric sensors. The position’s precision of the movement can achieve a level of millimeter, and its transition time is less than 1 minute. Meanwhile, with a LCD and a mouse which follows PS/2 protocol and other input/output devices, it can provide a friendly and humanistic man-machine conversation. 一、方案论证与比较 从控制系统的角度来看,采用闭环控制方式比采用开环控制的效果要好。但在闭环方式的控制系统中,一般都需要反馈信息。就本赛题而言,如果使用闭环方式进行控制,系统必须得到物体位置的反馈信息。 在方案论证的过程中,我们发现要取得物体位置反馈信息相当困难,采用纯粹的闭环方式控制的难度太大。同时,我们发现如果采用步进电机作为控制系统
悬挂运动控制系统(E题)
悬挂运动控制系统(2005年E题) 一、任务 设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。 在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。物体的形状不限,质量大于100克。物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点,示意图如下。 二、要求
1、基本要求: (1)控制系统能够通过键盘或其他方式任意设定坐标点参数; (2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成; (3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成; (4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。 2、发挥部分 (1)能够显示物体中画笔所在位置的坐标; (2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成; (3)其他。 三、评分标准 四、说明
1、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间; 2、若在某项测试中运动超过限定的时间,该项目不得分; 3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分; 4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动; 5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸) 测试时自带。 电动车跷跷板(F题) 【本科组】 一、任务
07年电子设计竞赛电动车跷跷板(悬挂运动控制系统).doc
悬挂运动控制系统 摘要:悬挂轨迹控制系统是一电机控制系统,控制物体在80cm×100cm 的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。设计采用AT89S51单片机作为核心器件实现对物体运动轨迹的自动控制,通过多圈电位器实现对悬挂物位置的精确测量,并引入局部闭环反馈控制环节对误差进行修正。以达到对物体的控制和对坐标点的准确定位。采用脉冲宽度调制技术控制直流电机驱动芯片L298,以实现对电机的转速、转向、启停等多种工作状态进行快速而准确的控制。采用红外光电传感器实现检测电机速度和画板上黑色曲线轨迹。 关键词:运动轨迹;多圈电位器;脉冲宽度调制;红外反射光电传感;直流电机驱动 第1章引言 悬挂轨迹控制系统是一电机控制系统。为满足控制需要,本系统采用AT89S51单片机作为核心器件,多圈电位器为物体位置数据采集器件,以L298驱动的直流电机为执行设备,键盘和LED显示为人机接口的结构方式。算法方面通过以微小直线为单位的策略,完成较为复杂的长直线、圆周和不确定曲线。系统软件将物体运动的坐标转化成悬绳伸缩的距离,进而计算出多圈电位器需要转动到的位置,再算出两直流电机的脉冲宽度调制(PWM)值。再通过A/D转换实现对悬挂物位置的精确测量,并引入局部闭环反馈控制环节对误差进行修正。对于系统自定的确定线型(直线和圆周),通过调整两个直流电机不同的PWM值的搭配,可以控制物体的运动方向。而对于不确定的曲线,由光电传感器得到路线信息,经过单片机的处理,给出物体运动方向的指令。 本设计的主要特点: 1、优化的软件算法,智能化的自动控制,误差补偿。 2、使用双动滑轮,有效防止滑轮与拉绳之间打滑。 3、使用多圈电位器与动滑轮同步转动,引入反馈,实现物体精确定位。 4、LED显示模块提供一个人机对话界面,并实时显示坐标及物体的运动轨迹。
悬挂运动控制系统设计方案
龙源期刊网 https://www.360docs.net/doc/1d13167765.html, 悬挂运动控制系统设计方案 作者:胡晓梅李静 来源:《数字化用户》2013年第19期 【摘要】文章介绍了一种智能悬挂运动控制系统的设计方案,该系统采用两片凌阳16位单片机(SPCE061A)作为悬挂控制系统的控制核心,以步进电机作为执行部件,实现对悬挂物体运动的控制。系统通过键盘扫描来完成运动参数和模式的设定,通过LCD实时显示画笔所在的坐标值,以无线传输的方式实现两单片机之间的数据通讯。另外,系统还通过语音播报来显示是否完成给定任务,提供了良好的人机界面。 【关键词】SPCE061A 步进电机 设计一电机悬挂控制系统,控制物体在倾斜(仰角≤100度)的板上运动。 在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为45cm×45cm。物体的形状不限,质量大于100克。板上标有间距为 5cm的浅色坐标线,左下角为直角坐标原点,具体要求示意图如图1。物体能做四种运动:点对点,直线,曲线(圆周),寻迹。 一、悬挂运动控制系统方案 (一)控制器模块。采用凌阳科技股份有限公司的SPCE061A单片机作为系统控制器,该单片机算术运算功能强,软件编程灵活,可用软件较简单的实现各种算法和逻辑控制,并且由于其成本低、体积小和功耗低等优点,使其在各个领域应用广泛;另外,由于本设计中会用到较多的算术运算,因此非常适合利用单片机作为控制器。 (二)电机类型选择。虽然直流电机具有良好的调速特性,带负载能力强,能承受频繁的冲击负载,而且速度快,但是直流电机的制动性差,很难实现小距离的精确控制,步进电机的准确定位和步进功能可方便而且可以实现提升、调速、定位,且具有一点的快速起停的能力;能准确的检测出速度、运行距离以及时间等参数,可简化编程和硬件连接的工作量。在本设计中,主控制器通过控制电机的步进数来实现物体运动,从而做出各种运动轨迹。 (三)电机驱动电路选择。传统的电机驱动都采用专用驱动器。若采用步进电机专用驱动器,可以为步进电机提供稳定的工作电压和工作电流。但是价格比较昂贵,且对本题来说,电机不需要带大负载,对驱动器没有过高的要求。所以考虑设计者考虑采用H桥形驱动电路。 不仅可以完成对步进电机的驱动,且电路简单,可以由设计者自行制作。电路主要由三极管8050、8550、9012、9014以及一些限流电阻组成,其中单片机I/O口分别通过光电耦合器与驱动电路相连接,增加了系统的抗干扰能力。单片机通过I/O口发出的驱动控制信号,控制步进电机的速度以及正反转,从而实现相应动作。
悬挂运动控制系统2资料
悬挂运动控制系统 摘要:本系统以单片机89C52为核心,采用了步进电机控制装置、红外寻迹传感装置来实现一个对悬挂物体运动控制系统。友好的操作界面和灵活的监控方式是本设计的两大特色,增强了系统的实用性。 关键词:步进电机;红外传感器;悬挂运动。 一、方案论证与选择 1.题目任务要求及相关指标的分析 题目的基本要求中,要求在150秒内到达设定的一个坐标点以及300秒内画圆或按照设定的轨迹运动,这要求我们对左右两个电机进行灵活、准确、快速的控制,并且有和谐的人机交换功能,才能够满足要求。因此选择合适的电机以及运用有效的算法来对电机进行控制是必需的,我们通过建立合理的数学模型,使两电机控制的绳长依照我们建立的函数关系变化,来实现悬挂物体在板上以各种方式运动。 发挥部分,要求控制物体沿板上标出的任意曲线运动,通过红外传感器寻迹,实现跟踪运动。而显示画笔的位置坐标,则可通过两段绳长变化与原点坐标之间的函数关系来计算,求出当前点的横纵坐标,并在LCD上显示出来。 2.方案的比较与选择 (1)电机的选择 方案一:直流电机 采用单片机和A/D转换构成系统,控制普通电机的步数和旋转方向,可以考虑达林管组成的H型PWM电路。用单片机控制达林管使之工作在占空比可调的开关状态,精确调整电机转速,减小因惯性,速度,步距角过大而引起的调整误差,达到改变绳长的要求,缺点是通过控制直流电机驱动模块将脉冲信号转化为模拟信号,需要将单片机输出的序列脉冲转换,延长了控制的时间,导致控制精度差;关键是直流电机不能即停,使直流电机不能精确定位,满足不了控制误差范围为设定值的要求。 方案二:步进电机 用单片机产生脉冲信号,脉冲信号的占空比为0.5左右,脉冲信号经过功率放大控制步进电机,控制信号为数字信号,不再需要数/模转换;步进电机的速度易于控制,具有快速启/停能力,可在一刹那间实现启动或停止;它的转动角度严格可控,一般情况步距角可以降低到 5.1以下,而采用专用驱动块,可以更加的精确。步进电机延时短,定位准确,精度高,可控制性强。这样我们就可以根据驱动脉冲总数来计算绳子所走过的路程,从而得出坐标和时间。 根据本课题技术指标要求,物体质量大于100克即可,步进电机的输出功率足以满足负载要求;同时根据题目要求运动轨迹与预期轨迹偏差不超过4cm,这对电机有精确的要求,而直流电机难以达到这一指标。综上方案的比较分析,
汽车悬架系统动力学研究
精心整理 (研究生课程论文) 汽车动力学 论文题目:汽车悬架系统动力学研究 指导老师:乔维高 学院班级: 学生姓名: 学号: 2015
汽车悬架系统动力学研究 摘要:汽车悬架类型的选择和悬架参数的差异对汽车的操纵稳定性和行驶平顺性具有重要的影响。主要分析了麦弗逊悬架的结构特点,并通过ADAMS软件建立麦弗逊悬架的3D模型,对其进行仿真分析,得出悬架参数的优化设计方法。关键词:麦弗逊悬架;ADAMS多刚体动力学;仿真分析 使驾驶者有不同的感受。看似简单的悬架系统综合多种作用力,决定着轿车的稳定性、舒适性和安全性,是现代轿车十分关键的部件之一。悬架系统起着传递车轮和车身之间的力和力矩、引导与控制汽车车轮与车身的相对运动、缓和路面传递给车身的冲击、衰减系统的振动等作用,汽车悬架系统对汽车的操纵稳定性、行驶平顺性都有很大的影响[1]。通过对麦弗逊悬架的仿真提出其优化分析方法。 麦弗逊悬架系统由两大基本部分组成:支柱式减震器和三角形托臂,具有结构简单,占用空间小,非簧载质量小,且与减震器弹簧配合使用组成一个可相对运
动的结构体,可以实现车身高度和悬架刚度的自由调节。但是,由于主销轴线位置在减振器与车身连接铰链中心和横摆臂与转向节连接铰链中心的连线上,当悬架在变形时,主销轴线也随之改变,前轮定位参数和轮距也都会相应改变,且变化量可能很大。因此,如果悬架结构设计不当,就会大大影响汽车产品的使用性能[2]。 1ADAMS软件简介 ADAMS模块是美国前MDI公司(MechanicalDynamicsInc.)与德国宝马(BMW)、奥迪(Audi)、法国雷诺( 的整车设计软件包。ADAMS 创建完全参数化的机械系统几何模型, 拉格朗日方程方法, 转向系、发动机、 ADAMS/Car模块中搭建汽 虚拟样机进行试验设计,进 2 由于麦弗逊悬架左右 ,系统会自动地建立另一边的模型。因此,这里建模过程只涉及到左侧悬架。 2.1物理模型的简化 麦弗逊悬架系统主要由车身1、上下摆臂2、转向横拉杆3、减震器及减震弹簧4、转向齿条5、车轮总成6和转向节带制动器总成7组成。悬架各刚体之间的连接关系为:减震器4的上端用螺栓和橡胶衬垫与车身相连接,减震器4下端固定在转向节7上,转向7通过球铰接与下摆臂连接;下摆臂一端通过两个转动铰接与
第七届(2005)悬挂运动控制系统(E题)
第七届(2005年)全国大学生电子设计竞赛作品 悬挂运动控制系统(E题) 毕业设计(论文)原创 摘要:悬挂轨迹控制系统是一电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。设计采用AT89S51单片机作为核心器件实现对物体运动轨迹的自动控制,通过多圈电位器实现对悬挂物位置的精确测量,并引入局部闭环反馈控制环节对误差进行修正。以达到对物体的控制和对坐标点的准确定位。采用脉冲宽度调制技术控制直流电机驱动芯片L298,以实现对电机的转速、转向、启停等多种工作状态进行快速而准确的控制。采用红外光电传感器实现检测电机速度和画板上黑色曲线轨迹。 关键词:运动轨迹;多圈电位器;脉冲宽度调制;红外反射光电传感;直流电机驱动 ABSTRACT:Hang trajectory control system is a motor control system, object make linear, circle, searching locus and etc locomotion within the range of the 80cm×100cm, while movement system can display the coordinate of the object. Adopt AT89S51 MCU as the main part to realize the automatic control of the object motion locus in this design, system using multiturn potentiometer to measure the position of object, and introduces local closed-loop feedback control system link to correct error, in that case system can improve the accuracy of control and orientation. In this design system also adopt PWM technique control DC motor drive chip L298 to realize the accurate control of motor rotation speed, rotation direction, Start, Stop and etc operating position. System adopt infrared photosensor measure motor rotation speed and drawing locus by black curve on the palette. KEY WORDS:sport trajectory;loopy potentiometer;PWM;infrared photosensor;DC motor driving 第1章引言
悬挂运动控制系统
悬挂运动控制系统 作者:李岩沈志张海宁 赛前辅导及文稿整理辅导教师:尹仕 摘要:本系统采用SPCE061A单片机作为控制系统的核心,通过光电编码盘实现对悬挂物位置的精确测量,并引入局部闭环反馈控制环节对误差进行修正。在寻迹过程中,采用无线数传通讯的反馈方式替代了有线连接的反馈方式,避免了线缆牵引带来的控制误差。系统采用点阵液晶和触摸控制屏实现了友善方便的人机交互界面。 Abstract:This system adopts the SPCE061A as the kernel of the control system. The system measures the position of the suspender through the photoelectric encoder and the position is been modified by the local feedback. During the seeking mark process, it makes use of the wireless data transmission feedback instead of the lineate feedback to avoid the system control error which brought by the line. The system uses a LCD and a touch screen realizes a friendly and conveniently HMI (Human Machine Interface).
悬挂运动控制系统论文
悬挂运动控制系统 作者:黄钦宁李树海莫琼华 (XX师X大学物理与信息工程学院创新基地XX 541004 ) 【摘要】本系统采用凌阳16位单片机SPCE061A作为控制中心,由直流步进电机、红外收发对管、4*4键盘及中文液晶显示屏构成的悬挂运动控制系统。该系统能自由控制悬挂物体完成自行设定运动、画圆运动、沿黑线运动等,并能正确显示物体到达的坐标位置。 【关键词】SPCE061A单片机中文液晶显示屏逼近画圆算法 A Control System For Suspension Movement [Abstract]This design uses SPCE061A as the control core to build a suspension movement control system which consists of a DC step motor, infrared emitting tube, 4X4 keyboard and an LCD display screen for Chinese characters. The system can control the suspended objects to plete the movements set by itself, such as drawing the circles, moving along the black lines and doing other movements. It also can display the correct location of the coordinate where the object reaches.
一种悬挂运动控制系统的近似插补算法研究
和各标定点载荷量,对钢丝绳施加标定力,把检测器 夹持于钢丝绳上,稳定后记录显示器读数.由小到大逐级递增标定力的值直到最大值.在完成1次加载过程后,调准传感器的平衡点(零点),进行卸载标定.将上述标定测试过程循环进行3次,从而取得3组标定原始数据供分析计算. 经过对传感器进行加载和卸载2次逆续标定后,利用Matlab 多项式拟和功能[5]对试验数据进行分析处理,得出实际所测的电压值与所需测量的张力值之间的关系:F =-0.021+0.067U ,最后把张力值后送入L ED 进行显示. 为了确保采集数据的准确,系统采用了数据冗余技术,这样可以有效防止因钢丝绳的抖动而造成的测量误差. 5 结束语 从硬件、软件两方面对细钢丝绳在线检测装置 进行了设计,并采取了一系列抗干扰措施来保证测 量精度.现场试验结果表明,该检测装置检测功能强,工作稳定可靠.参考文献: [1] 周绪祥.钢丝绳传统诊断方法的缺陷及科学方法介绍 [J ].鄂钢科技,2001,(3):14-15. [2] 强锡富.传感器[M ].北京:机械工业出版社,2001.[3] 童诗白,华成英.模拟电子技术基础[M ].北京:高等教 育出版社,2001. [4] 周立功.L PC900系列Flash 单片机应用技术(上册) [M ].北京:北京航空航天大学出版社,2003. [5] 张志涌.精通Matlab6.5[M ].北京:北京航空航天大学 出版社,2003. 作者简介:李 瑞 (1984-),女,山西临汾人,硕士研究生,研究方向为机电一体化;何永庆 (1953-),男,重庆人,工程师,研究方向为机电一体化. 一种悬挂运动控制系统的近似插补算法研究 叶敦范,刘金全,欧阳才校 (中国地质大学(武汉)机械与电子信息学院,湖北武汉430074) Research on t he Interpolation Algorit hm of One Cont rol System of Suspended Movement YE Dun 2fan ,L IU Jin 2qu an ,OU YANG C ai 2xiao (Faculty of Mechanical and Electronic Information ,China University of G eosciences ,Wuhan 430074,China ) 摘要:阐述了一种新的悬挂运动控制系统运动轨迹控制算法,通过悬挂系统的椭圆和双曲线轨迹来分别近似模拟二维平台在X ,Y 轴上的直线步进,使悬挂系统也能像二维运动平台那样很好的实现对运动轨迹的控制,并通过Matlab 仿真验证了其具有很好的控制效果. 关键词:悬挂系统;Matlab 仿真;直线插补算法 中图分类号:TP273文献标识码:A 文章编号:100122257(2009)0320031203收稿日期:2008210223 Abstract :This paper p resent s a new pat h t rack cont rol algorit hm of suspended movement cont rol. By separately simulating linear step of 2D platform on X and Y axis using ellip se and hyperbola track of suspended system ,it can cont rol t he movement t rack as well as t he 2D platform does.Simulation on Matlab proves t his system has excellently con 2t rol effect. K ey w ords :suspended system ;Matlab simula 2tion ;linear interpolation algorit hm 0 引言 目前悬挂运动控制系统在国内外许多行业中都有着广泛的应用,随着社会的发展,工业生产越来越要求自动化、省人力、效率高,人们对悬挂运动控制? 13?1机械与电子22009(3)
悬挂运动控制系统中软件算法设计与综合调试
文章编号:100628244(2009)0420042203 悬挂运动控制系统中软件算法设计与综合调试 In Suspension K inem atic Control System The Soft w are Design And Sythetic T esting 郝朝亮 李心田 吴才章 王伟生 H ao Zhaoli ang L i X i nti an W u Caiz hang W ang Weisheng (河南工业大学 河南郑州 450007) (He N an I ndust ry Uni versit y He N an Zhengz hou 450007) [摘要]本设计以微控制器A T89C52为核心,用直线差补和圆弧插补法实现电机的控制。在充分考虑非电 因素引起运动误差的基础上,根据规定的运动轨迹,建立完善的数学模型。在软件方面,为了有效解决汇编 语言除法运算引起的程序的复杂性,巧妙地通过查表方法,把除法运算转化为定点数加法运算,大大简化了编程量。驱动电路均采用光电耦合器隔离以避免干扰,软件部分利用抗干扰技术进行优化,提高系统可靠性。 [Abstract]In t his st udy ,a microcontroller A T89C52is taken as a center ,t he motor control are realized by linear differential compensated and cirsular plugged compensated met hod.Based on nonelectron factor cause t he kinematic error from consideration and prescreption kinematic locus ,the mat hemation model are estab 2lished.In software ,for solution assembly language division calculation into fixed point which make the pro 2gram complexity ,translation division calculation into fixed point data add calculation by look up table met h 2od ,the programining are simplified.For avidance interference use of t he p hotoelectrical coupler isolation in drive circuit ,optimization software by the anti 2interference 2techque ,t he system reliability are raised. 关键词:定点数 寻迹 单片机 步进电机 K ey w ords :Fixed point data Seek trace Single Chip processor Stemotor 中图分类号:463.33 文献标识码:B 作者简介:郝朝亮(19842),男,现就读于河南工业大学电气工程学院自动化专业 李心田(19842),男,河南工业大学电气工程学院自动化专业 吴才章(19682),男,华中科技大学智能仪器仪表专业博士,副教授,现从事智能测控领域研究和仪器仪表类教学和研究工作。王伟生(19792),男,讲师,昆明理工大学生产过程自动化专业毕业,现从事控制工程和仪器仪表方面的研究和教学工作。 1 引言 本设计以单片机A T89C52为核心,通过控制两台步进电机,使被控物体在倾斜板上完成规定的各种曲线运动;利用方便操作的434键盘设置运动模式和任意点参数,画笔根据设备的运动模式和相应参数,完成预定动作,在运行过程中能实时显示运动状态和画笔的坐标点参数;采用四个光电传感器完成寻迹功能并控制画笔绘制相应的曲线;在充分考虑非电因素(绳子弹性,滑轮直径,两台电机对称性等)引起运动误差的基础上,根据规定的运动轨 迹,将步进电机的转向和步进参数建立完善的数学模型。在软件处理方面,为了有效解决汇编语言除法运算引起的程序的复杂性,巧妙地通过查表方法,把除法运算转化为定点数加法运算,大大简化了编程量。驱动电路均采用光电耦合器隔离以避免干扰,软件部分利用抗干扰技术进行优化,提高系统可靠性。 2 硬件简述 根据系统要求控制器主要用于步进电机和画笔的控制,传感器信号的接收和辨认。本系统控制对 — 24—第23卷第4期2009年12月传 动 技 术 DRIV E SYSTEM TECHNIQU E Vol.23 No.4December 2009