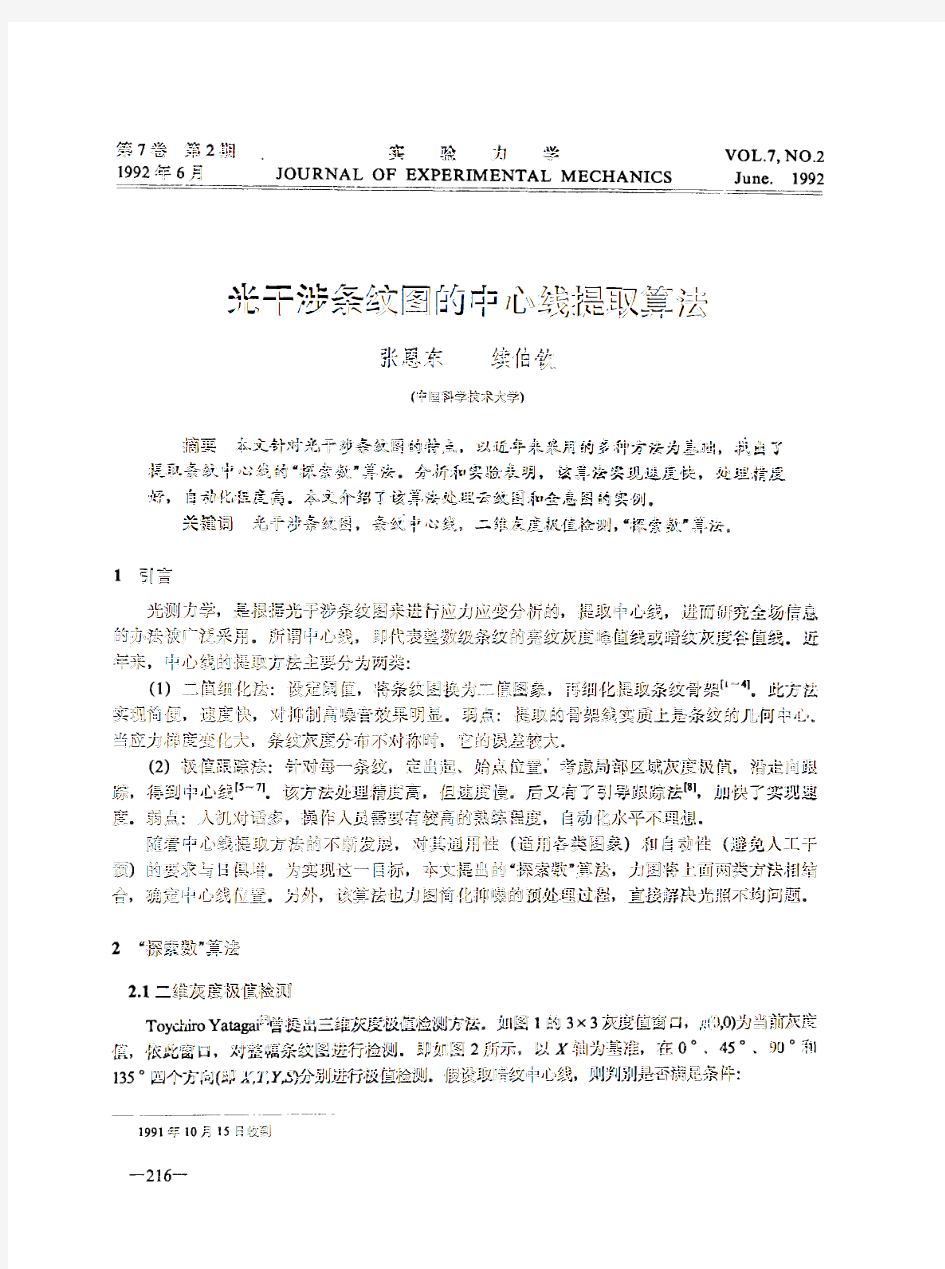
光干涉条纹图的中心线提取算法
ArcGIS方法利用到路面提取道路中心线的方法
A r c G I S方法-利用到路面提取道路中心线的方法利用到路面提取道路中心线的方法在利用GIS制图时,需要经常跟数据打交道。很多初级的制图人员都存在一种惯性思路,以为数据精度越高,出图的效果就越好。这是错误的观点。假如现在需要制作1:1w的地图,但手头上却只有1:500的地形图,数据精度虽然很高,但却无法在小比例尺下显示出来。回到主题上,1:500的数据,大多数道路都是以面状显示。由于其精度高,有些数据甚至是不带线道路图层的,而在1w的地图下,道路以线状表达才是符合要求的。所以,这就需要涉及到地图制图的一个常规工作—地图缩编。本文主要介绍如何从到路面直接提取出道路中心线,从而辅助小比例尺地图的制作。 由于面状数据一般都是不规则的,所以很难从其提取中心线,一般的GIS软件也没提供直接提取的工具。ArcGIS里面虽然也有一些工具可以辅助一下处理,例如在制图工具箱里面有一个提取中心线的工具,但这个工具的作用是通过道路边线(双线)提取中心线。也有人说ArcGIS里面同样是提供面转线工具,先用工具转一道再提取不就行了吗?可是问题来了,面转线工具传出来的数据是封闭线,而不是道路边线,提取中心线工具依然是不可用,除非在每个路面图形打断两端的封闭,不然无法进行提取,恰好打断工作又是非常的巨大。因此,该方法还是不可用。 为了解决这个问题,那就是ArcScan扩展模块。提到ArcScan扩展,很多专业人员第一时间反应是这只是个栅格矢量化工具,跟当前讨论的中心线提取似乎没有任何关系。只要深入了解ArcScan扩展的具体细节,我们不难发现其自动矢量化里面可以提取面要素和中心线,利用这一特性,我们就可以曲线去完成该任务了。 先来说说总体思路:将路面(矢量面数据)转化为栅格数据,因为ArcScan只能对栅格数据进行处理,由于是从矢量转为栅格而非扫描,栅格质量一般会非常好;通过二值化栅格
干涉条纹图数字图像处理
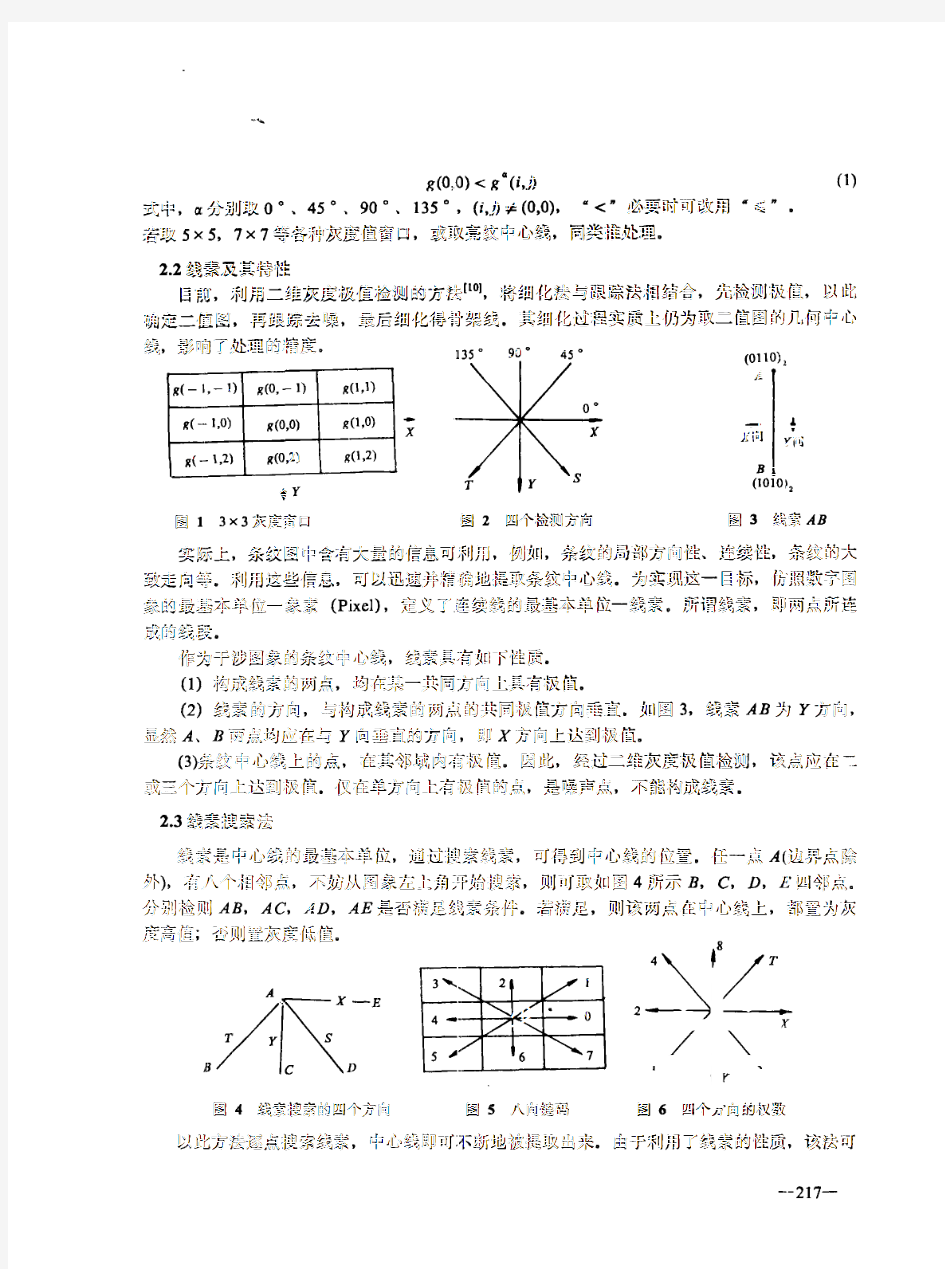
干涉条纹图的数字图像处理 滤波 由于CCD 拍摄的图像中存在很大的噪声,滤除噪声的干扰对后期的处理相当重要。由于噪声的多样性,本文采用W iener 自适应滤波【】,W iener 自适应滤波根据图像的局部方差来调整滤波器的输出。当局部方差大时,滤波器平滑效果强。 对灰度图中的每一个像素点()j i f ,, W iener 滤波器采用的算法首先估计出像素的局部矩阵μ和方差2σ: ()∑∈=ημj i j i f MN ,,1 (1) ()2,22,1μση-=∑∈j i j i f MN (2) η是图像中每个像素的N M ?的邻域。个像素利用W iene 旎波器估计出其灰度值: ()()()μσ νσμ--+=j i f j i b ,,222 (3) 式中:2ν是图像中噪声的方差。 细化处理 对滤波后的图像先进行二值化,并对二值化的干涉条纹进行细化处理【】。干涉条纹的细化难点在于解决骨架的抽取,防止断点出现和剔除毛刺。基于以上的考虑,本文利用数学形态学【】中的零交叉细化法来进行图像的细化。其优点是对条纹的平滑和骨架抽取同时进行,并且可以有效地防止分支和解决易产生断点的问题,其算法如下。 图1所示为图像中的一个3x3区域,各点标记名称为
9321,,,,P P P P ???, ,其中1P 位于中心,若11=P (即黑点),下而4个条件如果同时满足,则删除()011=P P 。 ()()()()???????≠=??≠=??=≤≤10Z 01001062464228 4211P P P P P Z P P P P Z P NZ 或者或者 (4) 图1图像区域 根据上而的算法,对图像中的每一点重复这一步骤,直到所有的 点都不可删除为止,图像便可得到细化。 13亚像素边缘检测 对细化后的图像利用Zemike 正交矩【】对边缘进行亚像素定位。Zemike 矩是积分型算子,对噪声不敏感,建立理想的阶跃边缘模型如图2所示。 图2理想阶跃边缘模型 图2中:b 为单位圆内的背景灰度、h 为阶跃高度,;L 为边缘上的直线,;a 为圆盘中心到边缘的垂直距离,’e 为边缘与x 轴所成的角度。Zemike 矩的多项式定义为 ()θθρin nm nm e R V =, (5) 式中:nm R 是Zemike 矩的正交多项式。 图像()y x f ,的二维Zemike 矩在的条件下可表示为 ()()θρ,,*nm x y nm V y x f Z ∑∑= ( 6) 对于一幅大小N N ?的数字离散化二维图像的Zem ike 矩可以表示为
一种基于脊线跟踪的冠状动脉中心线提取方法
收稿日期:2006-11-26;修订日期:2007-07-06 基金项目:新世纪优秀人才支持计划资助项目(NCET 20420948) 作者简介:高飞(1968-),男,山东昌乐人,副教授,博士,主要研究方向:智能信息处理、图像图形学; 高新波(1972-),男,山东莱芜人,教授,博士,主要研究方向:智能信息处理、图像工程、视频信号处理. 文章编号:1001-9081(2007)S1-0380-02 一种基于脊线跟踪的冠状动脉中心线提取方法 高 飞1 ,高新波 2 (1.深圳大学信息工程学院,广东深圳518060;2.西安电子科技大学电子工程学院,陕西西安710071)(nels on_gao2010@yahoo .com;nels ongao2010@g mail .com ) 摘 要:冠脉血管中心线的提取是血管造影图像定量分析中的关键步骤。基于脊线跟踪法,提出了一种血管中心线自动提取方法。通过交互式地指定一个起始点和一个终止点,该算法能够自动获取两点间的血管中心线。实验结果表明了该方法的鲁棒性和可重复性。 关键词:中心线提取;定量冠脉分析;脊线跟踪中图分类号:TP391.41 文献标识码:A 0 引言 冠脉血管造影是临床诊断的重要手段。对冠脉血管进行 定量分析具有重要的实际意义。与传统定性诊断方法相比,它克服了医生判断的主观随意性,提供了更为客观准确的诊断依据。血管轮廓线和中心线的自动提取是血管定量分析的前提。在血管造影图像中,血管的提取可以采用基于区域或边缘的图像分割技术。文献[1]中指出血管的剖面灰度分布呈近似高斯型,因此利用二维高斯模板来提取血管,但该方法比较耗时。文献[2]中利用一维旋转高斯模板代替了二维高斯模板,降低了算法的复杂度。不过,从精确分析的角度看,在血管分析中准确提取血管边缘是更好的选择。在现有的许多血管轮廓提取算法中,血管中心线的检测是最为关键和困难的一步。最简单的方法是手工描绘[3],但该方法费时费力且可重复性差,所以逐渐为人机交互的半自动方法所取代。在这些交互式方法中,操作者只需指明待分析血管段的起始点和结束点,就可以自动获得两点间的中心线[4,6]。不过,现有的中心线提取算法大都基于动态规划方法的,搜索时间较长,难以满足临床上实时性的要求。因此急需研究实时性能好的血管中心线提取算法。 既然血管剖面呈近似高斯分布,那么可以将血管的中心线看作脊线。中心线提取问题就转化为脊线的检测。受文献[5]中指纹特征点提取的脊线跟踪法的启发,本文提出了一种基于脊线跟踪的血管中心线提取方法,在实际应用中也取得了比较好的效果。需要指出的是,这里所说的中心线并不是严格的血管的对称轴线,只要求它位于血管内部且与血管走向一致即可,文献[4]中对此有详细说明。 1 血管中心线提取算法 1.1 图像预处理 血管造影图像质量因拍摄条件的不同而参差不齐,一般都有较强的噪声干扰。既然本文方法主要依据的是血管的脊线特征,因此,首先需要降低噪声对脊线特征的破坏。这里采用二维高斯模板来平滑噪声,模板大小一般应大于所选血管段的最大直径。图1显示了滤波的效果:图1(a )是沿血管一个剖面(垂直中心线方向)的灰度分布曲线,可以看到它近似 的反高斯形状;图1(b )是相应位置的梯度强度;图1(c )(d )为对应的平滑处理结果,可以看到,虽然处理后目标与背景的对比度降低了,但目标灰度和梯度的真实结构得到了加强,这有利于后面准确的计算局部脊线方向 。 图1 预处理结果显示 1.2 中心线跟踪 跟踪过程可以分为两步:局部脊线方向计算和中心线上点的更新。局部脊线方向计算方法将在1.3节中详述,这里假设已经得到了这个方向。为了叙述方便,以下将正在处理的点称为当前点。如图2所示,P k -1是当前点,在P k -1处计算 得局部脊线方向为θk -1,由P k -1沿θk -1前进d 个像素到达P ′k ,通过点的更新操作更新到P k ,此时P k 成为当前点。重复以上过程直到停止条件满足。在P ′k 点的更新操作中利用了匹配滤波方法:在P ′k 点得到局部脊线的估计方向θ′k ,以P ′k 为中心,在θ′k +π 2 的方向上获得剖面灰度分布曲线g ′(i )(i =1,…,2l +1)。设f (k )(k =-m ,…,m )为一维高斯 滤波模板,长度为2m +1,满足 ∑k f (k ) =1。通过下式来得到 更新的灰度分布g (i )(i =1,…,2l +1): ∑m v =-m f (v ) g ′ (i +v ),i =m +1,…,2l -m g ′(i ), 其他 (1) 取g (i )的局部极小值点作为更新点P k (如图2所示)。其中,参数l 、m 、d 可以经验地选择,l 应至少大于最大血管直 第27卷2007年6月 计算机应用 Computer App licati ons Vol .27June 2007
冠状动脉中心线提取
冠状动脉中心线提取 2018.12.5 1简介 1.1步骤和实现方式 本次任务是从冠状动脉增强图像提取血管中心线。步骤和实现方式大致如下: ?图像二值化:读入.mha格式CT图像,阈值处理; ?空洞填充 ?图像细化:类似腐蚀,取最大内切球心的集合 ?端点分叉点检测:考虑26邻域内像素个数,卷积实现 ?断裂分支重连:寻找连接点,条件判断,Dijkstra最小代价连接 ?构建中心线:在分叉点集基础上追踪,数组存储在Cell中 1.2运行说明 coronary_refine.m是主要的运行函数。其他函数和脚本:branchReconnect输入细化后的图像和权重(原始CT volume的像素值为可能性),其中调用了三维的Dijkstra函数;directConnect脚本很简短地实现在三维图像中两点连直线,但因为用了最短路径所以没有采用;其余函数都是由比较冗长的小功能封装成的。两张图片运行时间小于一分钟。 2实现方法 2.1阈值 为了不让阈值化后丢失的成分过多,对后续分支重连的步骤造成困难,这里选择了较小的阈值0.1*原图最大值(2^16)。这也导致最后结果中分支会显得比0.5的阈值下丰富很多,但算法能够原图(mha)保证最终中心线和真实血管走向的一致性。 2.2空洞填充 一开始使用的是imfill函数,通过查看源代码可见这个函数调用了imcomplement和imreconstruct对二值图像进行填充。imfill对三维图像的处理速度较慢,最终使用形态学库函数bwmorph3中的fill功能进行处理。
图1:Skeleton of a rectangle defined in terms of bi-tangent circles. 2.3图像细化 程序中调用了bwskel来实现。Thinning在文献中有两种最为常见的方法,一种被称为“Onion peeling”1,顾名思义用不断的腐蚀操作来一层一层地剥开血管,难点是设置一定的条件来保证原有拓扑结构。这个方法也是bwskel的参考文献中使用的方法。2还有一种细化方法也和腐蚀有些类似,基本思路是求连通域内部的内切圆心(三维为球心)集合,如图一。 2.4基于卷积的端点分叉点检测 虽然形态学库函数中同样有branch和endpoint的功能,但这两个功能的feature都导致它们并不适合直接使用。比如bwmorph3中branch会返回所有分叉点以及分叉点各自的相邻点。面对如此古怪的feature,不如构造简单的卷积核来求端点分叉点。 ?分叉点检测 首先考虑3*3*3全1的卷积核。在二值、细化图像非分叉部分,其响应应该为3。如果将响应大于3的视为分叉,其结果中会有很多处于真正的分叉点附近、实际却为原图空白部分的点被误判成分叉。原因就是分叉附近往往点较为密集,空白点的26邻域内也容易出现多个1,导致超出阈值。解决方法很简单,要让卷积能区分出原中心线上的点和空白格,只要在kernel的中心加大权重,这样空白格的响应和值为1的点差距会变得很大,从而被排除在外。代码如下(因为convolution包含padding,最终结果还需删除padding部分): 1A Sequential3D Thinning Algorithm and Its Medical Applications 2Ta-Chih Lee,Rangasami L.Kashyap and Chong-Nam Chu Building skeleton models via3-D medial surface/axis thinning algorithms. Computer Vision,Graphics,and Image Processing,56(6):462-478,1994.
【CN110021017A】一种提取焊缝中心线的方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910261024.5 (22)申请日 2019.04.02 (71)申请人 南通大学 地址 226019 江苏省南通市啬园路9号 (72)发明人 赵佳皓 李凯凯 朱俊国 裴彬辉 黄奕晟 华亮 商亮亮 罗来武 吴劲松 卢聂诚 袁畅 于文渊 (51)Int.Cl. G06T 7/00(2017.01) G06T 7/136(2017.01) G06T 7/187(2017.01) G06T 7/194(2017.01) G06T 7/66(2017.01) (54)发明名称一种提取焊缝中心线的方法(57)摘要本发明涉及一种提取焊缝中心线的方法,包括:获取焊缝的原始图像;对所述原始图像进行同态滤波,获得削弱光照影响的灰度图像;对所述灰度图像进行局部阈值二值化处理得到二值图像;对局部阈值二值化处理后的二值图像进行形态学操作;将处理后的二值图像进行连通域处理,提取最大连通域,得仅保留焊缝的二值图像;使用距离变换函数将二值图像变换为凸显出焊缝中心线的灰度图像;对处理得到的灰度图像进行局部阈值二值化处理,得到保留焊缝中心线的二值图像;对处理得到的保留焊缝中心线的二值图像进行形态学处理和连通域处理,提取焊缝中心线。本发明公开的提取焊缝中心线的方法提取准确度高,而且对焊接环境要求不高, 应用广泛。权利要求书1页 说明书4页 附图9页CN 110021017 A 2019.07.16 C N 110021017 A
权 利 要 求 书1/1页CN 110021017 A 1.一种提取焊缝中心线的方法,其特征在于,包括以下步骤: S1.获取焊缝的原始图像; S2.对所述原始图像进行同态滤波,获得削弱光照影响的灰度图像; S3.对所述灰度图像进行局部阈值二值化处理得到二值图像; S4.对局部阈值二值化处理后的二值图像进行形态学操作; S5.将处理后的二值图像进行连通域处理,提取最大连通域,得到仅保留焊缝的二值图像; S6.使用距离变换函数将步骤S5处理得到的二值图像变换为凸显出焊缝中心线的灰度图像; S7.对步骤S6处理得到的灰度图像进行局部阈值二值化处理,得到保留焊缝中心线的二值图像; S8.对步骤S7处理得到的保留焊缝中心线的二值图像进行形态学处理和连通域处理,提取焊缝中心线。 2.根据权利要求1所述的提取焊缝中心线的方法,其特征在于,对所述灰度图像进行局部阈值二值化处理得到二值图像,具体包括:对所述灰度图像中的每个像素点进行处理,得到二值图像;其中,二值图像中像素值为1的点属于前景区域,所述前景区域对应焊缝位置,二值图像中像素值为0的点属于背景区域。 3.根据权利要求1所述的提取焊缝中心线的方法,其特征在于,对局部阈值二值化处理后的二值图像进行形态学操作,具体为:通过开操作断开不同连通区域之间的弱小的连接,使噪声形成孤立的小区域,再通过设定面积阈值去除噪声,得到降噪图像;对所述降噪图像通过闭操作闭合图像缺损。 4.根据权利要求1所述的提取焊缝中心线的方法,其特征在于,步骤S6中所述距离变换函数为bwdist函数,所采用的公式为: b2=bwdist(~b1) 上式中,b1对应二值化焊缝图像矩阵,b2对应变换得到的凸显出焊缝中心线的灰度图像矩阵。 5.根据权利要求1所述的提取焊缝中心线的方法,其特征在于,对保留焊缝中心线的二值图像进行形态学处理和连通域处理,提取焊缝中心线,具体包括:对保留焊缝中心线的二值化图像进行闭操作,得到消除内部孔洞的二值图像;对闭操作处理后的二值图像求最大连通域并保留最大连通域,得到略粗的二值化焊缝图像;对略粗的二值化焊缝图像进行细化操作得到所提取的焊缝中心线。 2
干涉条纹图数字图像处理
干涉条纹图的数字图像处理 滤波 由于CCD 拍摄的图像中存在很大的噪声,滤除噪声的干扰对后期的处理相当重要。由于噪声的多样性,本文采用W iener 自适应滤波【】,W iener 自适应滤波根据图像的局部方差来调整滤波器的输出。当局部方差大时,滤波器平滑效果强。 对灰度图中的每一个像素点()j i f ,, W iener 滤波器采用的算法首先估计出像素的局部矩阵μ和方差2σ: ()∑∈ = ημj i j i f MN ,,1 (1) ()2 ,2 2,1μ ση-= ∑∈ j i j i f MN (2) η是图像中每个像素的N M ?的邻域。个像素利用W iene 旎波器估计出其灰度值: ()()()μσ νσμ--+=j i f j i b ,,2 2 2 (3) 式中:2ν是图像中噪声的方差。 细化处理 对滤波后的图像先进行二值化,并对二值化的干涉条纹进行细化处理【】。干涉条纹的细化难点在于解决骨架的抽取,防止断点出现和剔除毛刺。基于以上的考虑,本文利用数学形态学【】中的零交叉细化法来进行图像的细化。其优点是对条纹的平滑和骨架抽取同时进行,并且可以有效地防止分支和解决易产生断点的问题,其算法如下。 图1所示为图像中的一个3x3区域,各点标记名称为
9321,,,,P P P P ???, ,其中1P 位于中心,若11=P (即黑点),下而4个条件如果同时满足,则删除()011=P P 。 ()()()()???????≠=??≠=??=≤≤1 0Z 0100106 2464228 4211P P P P P Z P P P P Z P NZ 或者或者 (4) 图1图像区域 根据上而的算法,对图像中的每一点重复这一步骤,直到所有的点都不可删除为止,图像便可得到细化。 13亚像素边缘检测 对细化后的图像利用Zemike 正交矩【】对边缘进行亚像素定位。Zemike 矩是积分型算子,对噪声不敏感,建立理想的阶跃边缘模型如图2所示。 图2理想阶跃边缘模型 图2中:b 为单位圆内的背景灰度、h 为阶跃高度,;L 为边缘上的
道路河流转中心线
(1)这个问题不是以前已经解决了吗? 我觉得目前有两个方法较好的解决。 第一个方法:面转线-如果线是封闭的用FME的DistanceSnipper函数可将线剪掉一小断-可以考虑对线适当的平滑(可选)-加密线上节点-用CollapseDualLinesToCenterline工具提取。 因为CollapseDualLinesToCenterline工具提取线中线时,算法是根据线上节点来提取的,加密节点后效果明显变好。 第二个方法:直接用FME的CenterLineReplacer函数生成面的中线。 见贴:https://www.360docs.net/doc/251371121.html,/ESRI/ ... p;extra=&page=1 (2) [已解决] 如何快速断开多条线?(提取中心线问题) 本帖最后由 mgfwhy 于 2009-10-12 11:27 编辑 见贴: https://www.360docs.net/doc/251371121.html,/ESRI/viewthread.php?tid=40029&highlight=%D6%D0%D0%C4%CF%DF 缘兄提到将线断开。可是如果有多条线的话,一一去断开也是一项非常的工程。 请问有快速将一层内线断开的方法吧? 此外断开的位置对提取结果是否有影响?断开处开口的大小是否有影响? (3)我得先确定机器里是否有FME (4)安装ArcGIS的时候,如果是完整安装会有Extension这项,装好之后,在安装目录下会有这几项 D:\Program Files\ArcGIS\Data Interoperability Extension\workbench.exe D:\Program Files\ArcGIS\Data Interoperability Extension\fme.exe D:\Program Files\ArcGIS\Data Interoperability Extension\fmeview.exe 第一个是FME的workbench,第三个是fmeview,你可以去找找看,双击打开试试。(可以修改一下盘符,然后把地址贴到开始\运行窗口下确定) 这里的fmeview是可以脱离ArcGIS环境打开的,workbench不行。 ArcGIS嵌入了FME的这两个模块来扩充数据处理能力,但是需要ArcGIS环境。这时候不需要额外安装FME即可在Arctoolbox里新建spatial etl tool(根据向导一步步打开之后是FME Workbench) 另外,Arctoolbox下的data interoperability tools,类似于FME universal translator,支持多种格式的地理数据
光学显微线条纹图像中心线提取
第25卷一第5期2017年5月一一一一一一一一一一一一光学精密工程一O p t i c s a n dP r e c i s i o nE n g i n e e r i n g 一一一一一一V o l .25一N o .5一一M a y 2 017一一收稿日期:2016-09-29;修订日期:2016-11-29.一一基金项目:国家自然科学基金资助项目(N o .U 1501247,N o .51605166,N o .1609206);广东省科技计划资助项目(N o .201604010100,N o .2015B 020239001)文章编号一1004-924X (2017)05-1340-08 光学显微线条纹图像中心线提取 李一海,张宪民?,黄沿江,单译琳(华南理工大学广东省精密装备与制造技术实验室,广东广州510640) 摘要:由于接近光学衍射极限,微米尺度线条纹在经过高倍显微镜放大成像后边缘通常都很模糊,加上同轴光源产生的光照不均匀现象,成像质量通常很差三为了有效测量微米尺度线条纹间距,本文提出了一种针对光学显微线条纹图像的中心线提取算法三首先,采用R e t i n e x 方法对原图像进行增强, 以克服由光照不均匀所造成的无法准确分割的问题三接着,使用O s t u 最佳阈值对图像进行二值分割三然后, 针对分割后条纹边缘含有大量毛刺和凹陷的现象,使用基于快速步进算法的边缘塌陷法对中心线进行准确提取三最后,对提取中心线进行了最小二乘拟合三实验结果表明:本文提出的方法可以有效实现微米尺度线条纹光学显微图像中心线的准确提取三使用本方法对标准宽度线条纹间距进行实测的最大测量偏差小于2%三关一键一词:显微图像;线条纹;中心线提取;快速步进法;R e t i n e x ;边界塌陷中图分类号:T P 394.1一一文献标识码:A一一d o i :10.3788/O P E .20172505.1340 C e n t e r l i n e e x t r a c t i o no f s t r i p e i m a g e db y o p t i c a lm i c r o s c o p e L IH a i ,Z H A N G X i a n -m i n ?,HU A N G Y a n -j i a n g ,S H A N Y i -l i n (G u a n g D o n g P r o v i n c eK e y L a b o r a t o r y o f P r e c i s i o nE q u i p m e n t a n d M a n u f a c t u r i n g T e c h n o l o g y ,S o u t hC h i n aU n i v .o f T e c h .,G u a n g z h o u 510641,C h i n a )?C o r r e s p o n d i n g a u t h o r ,E -m a i l :z h a n g x m @s c u t .e d u .c n A b s t r a c t :D u et ot h e p r o x i m i t y o ft h eo p t i c a ld i f f r a c t i n g l i m i t a t i o n ,t h ee d g e so ft h es t r i p e si n m i c r o m e t e r s c a l e a r eb l u r r e d a f t e rm a g n i f i c a t i o nb y t h e o p t i c a lm i c r o s c o p e .T o g e t h e rw i t h t h eu n e v e n i l l u m i n a t i o n c a u s e db y c o a x i a l l i g h t i n g s o u r c e ,t h es t r i p e i m a g e q u a l i t y i sv e r yp o o r .T oe f f e c t i v e l y m e a s u r e t h e s t r i p e d i s t a n c eb e t w e e n t w o s t r i p e s i nm i c r o m e t e r s c a l e ,a c e n t e r l i n e e x t r a c t i o n a l g o r i t h m w a s p r o p o s e d .F i r s t ,as i n g l es c a l e R e t i n e x m o d e lw a sa d o p t e dt oe n h a n c et h eo r i g i n a l i m a g et o o v e r c o m e i n a c c u r a t es e g m e n t a t i o nc a u s e db y u n e v e ni l l u m i n a t i o n .A f t e rt h a t ,b i n a r y s e g m e n t a t i o n w a s c o n d u c t e do nt h ee n h a n c e di m a g ev i ao p t i m a l t h r e s h o l dv a l u eo fO s t u .T h e n ,d i r e c t i n g a t t h e p h e n o m e n o n t h a t t h e r ew a s m u c hr a g a n dh o l l o w a t t h eb o u n d a r y o fs t r i p e sa f t e rs e g m e n t a t i o n ,a b o u n d a r y c o l l a p s e m e t h o d b a s e d o n f a s t m a r c h i n g a l g o r i t h m w a s u t i l i z e d t o e x t r a c t c e n t e r l i n e a c c u r a t e l y .F i n a l l y ,l e a s ts q u a r ef i t t i n g m e t h o d w a sc o n d u c t e dt of i tt h e e x t r a c t e d c e n t e r l i n e s .E x p e r i m e n t a l r e s u l t ss h o w t h a tt h e p r o p o s e d m e t h o dc a ne f f e c t i v e l y r e a l i z ea c c u r a t ee x t r a c t i o no f s t r i p e c e n t e r l i n e i nm i c r o s c o p i c i m a g ew i t hm i c r o m e t e r s c a l e ;t h em a x i m u m m e a s u r e dd e v i a t i o no f t h i s m e t h o d i sl e s st h a n2%w h e ni ti su s e df o r m e a s u r i n g s t r i p ed i s t a n c eb e t w e e nt w os t r i p e s w i t h s t a n d a r dw i d t h .K e y w o r d s :m i c r o s c o p i c i m a g e ;s t r i p e s ;c e n t e r l i n e e x t r a c t i o n ;f a s tm a r c h i n g m e t h o d ;r e t i n e x ;b o u n d a r y c o l l a p s e 万方数据
基于Hessian矩阵的线结构光中心线提取方法研究
10.16638/https://www.360docs.net/doc/251371121.html,ki.1671-7988.2017.22.013 基于Hessian矩阵的线结构光中心线提取方法研究 李栋梁,唐阳山,黄贤成,朱停仃 (辽宁工业大学汽车与交通工程学院,辽宁锦州121001) 摘要:在现代工业产品制造过程中,线结构光扫描三维视觉系统已经在表面缺陷检测的许多方面得到运用,而线结构光扫描的关键要提取出模型的中心线。研究以Steger算法为前提,在线结构光条纹中心提取中引入了大模板高斯卷积递归得算法,提出了基于Hessian矩阵的线结构光条纹中心线提取的快速算法。此算法借助于高斯卷积递归求得条纹各点矩阵,进而求出条纹各点法线方向,然后运用泰勒级数在法线方向求得条纹中心准确位置。这种方法不仅减小了以前算法的运算量,而且可以快速高效的提取出中心线。 关键词:结构光视觉;光条;亚像素;高斯卷积 中图分类号:TP301 文献标识码:A 文章编号:1671-7988(2017)22-37-03 Based on the Hessian matrix of the linear structured light center Line extraction method research Li Dongliang, Tang Yangshan, Huang Xiancheng, Zhu Tingting ( Cars and traffic engineering of liaoning university of technology college, Liaoning Jinzhou 121001 ) Abstract: In the process of manufacturing modern industrial products, the line-structured optical scanning 3D vision system has been applied in many aspects of surface defect detection, and the key to the line-structured optical scanning is to extract the center line of the model. Based on the Steger algorithm, this paper introduces a large template Gaussian convolution recursive algorithm based on the Hessian matrix, which is based on the Hessian matrix. This algorithm uses the Gaussian convolution to obtain the stripes of each point matrix, and then find the stripes of the normal direction, and then use the Taylor series in the normal direction to find the exact location of the stripes center. This method not only reduces the computational complexity of the previous algorithm, but also can quickly and efficiently extract the center line. Keywords: Structured light vision; Light bar; Sub-pixel; Gaussian convolution CLC NO.: TP301 Document Code: A Article ID:1671-7988(2017)22-37-03 前言 当前阶段,国内外传统的线结构光中心线的提取方法有极值法、阈值法、灰度重心法、Steger算法等[1]。传统的Steger 算法提出了一种利用Hessian矩阵求出结构光条纹的法线方向,进而求出光条纹中心线的法线方向上的极值点得到亚像素位置[2]。但其运算量大以及在光条纹中心线的提取速度方面存在欠缺,难以满足对时间要求较高的工业生产中。本文所研究的线结构光中心线提取方法以传统的Steger算法为前提,在线结构光条纹中心提取中引入大模板高斯卷积递归,提出基于Hessian矩阵的线结构光条纹中心线提取的快速算法[3]。此算法借助于高斯卷积递归求得条纹各点矩阵,进而求出条纹各点法线方向,然后运用泰勒级数在法线方向求得条纹中心准确位置。 作者简介:李栋梁,就读于辽宁工业大学汽车与交通工程学院。基金项目:辽宁省科技厅联合基金项目(201602375)。
ArcGIS方法利用到路面提取道路中心线的方法精编版
A r c G I S方法利用到路面提取道路中心线的方 法 集团企业公司编码:(LL3698-KKI1269-TM2483-LUI12689-ITT289-
A r c G I S方法-利用到路面提取道路中心线的方法利用到路面提取道路中心线的方法在利用GIS制图时,需要经常跟数据打交道。很多初级的制图人员都存在一种惯性思路,以为数据精度越高,出图的效果就越好。这是错误的观点。假如现在需要制作1:1w的地图,但手头上却只有1:500的地形图,数据精度虽然很高,但却无法在小比例尺下显示出来。回到主题上,1:500的数据,大多数道路都是以面状显示。由于其精度高,有些数据甚至是不带线道路图层的,而在1w的地图下,道路以线状表达才是符合要求的。所以,这就需要涉及到地图制图的一个常规工作—地图缩编。 本文主要介绍如何从到路面直接提取出道路中心线,从而辅助小比例尺地图的制作。 由于面状数据一般都是不规则的,所以很难从其提取中心线,一般的GIS 软件也没提供直接提取的工具。ArcGIS里面虽然也有一些工具可以辅助一下处理,例如在制图工具箱里面有一个提取中心线的工具,但这个工具的作用是通过道路边线(双线)提取中心线。也有人说ArcGIS里面同样是提供面转线工具,先用工具转一道再提取不就行了吗?可是问题来了,面转线工具传出来的数据是封闭线,而不是道路边线,提取中心线工具依然是不可用,除非在每个路面图形打断两端的封闭,不然无法进行提取,恰好打断工作又是非常的巨大。因此,该方法还是不可用。 为了解决这个问题,那就是ArcScan扩展模块。提到ArcScan扩展,很多专业人员第一时间反应是这只是个栅格矢量化工具,跟当前讨论的中