FANUC系统参数解释

一.16系统类参数
I/O 通道1的参数:
其它通道参数请见参数说明书。
5.行程限位参数
12.其它
二.0系统参数1.SETTING 参数
3.伺服控制轴参数
4.坐标系参数
5.行程限位
6.进给与伺服电机参数
7.DI/DO参数
8.显示和编辑
9.编程参数
10.螺距误差补偿
11.刀具补偿
12.主轴参数
13.其它
发那科系统参数总表
发那科系统参数 系统参数不正确也会使系统报警。另外,工作中常常遇到工作台不能回到零点、位置显 示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC信号或连线无误,应检查有关参数。 一.16系统类参数 0:OFF 1:ON 1.SETTING 参数(与设定相关的参数) 参数号符号意义16-T 16-M 0000/0 TVC 代码竖向校验O:不进行1:进行 0000/1 ISO EIA/ISO代码O:EIA代码1:ISO代码 0000/2 INI MDI方式公/英制O:米制1:英制 0000/5 SEQ 自动加顺序号O:不进行1:进行 0002/0 RDG 远程诊断O不进行1进行 0002/7 SJZ 手动参考位置返回0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。1只用减速挡块进行参考位置返回。 0012/0 MIRx 各轴镜像的设定0关闭1开启 0012/4 AIC 轴命令的移动距离0依照指定的地址1总为增量命令 0012/7 RMVx 各轴的受控轴拆除设定0不拆除受控轴1拆除受控轴 3216 自动加程序段号时程序段号的间隔O 1 2.RS232C口参数 0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。0,1RS-232-C串行端口1 2 RS-232-C串行接口2 3遥控缓冲器 接口4存储卡接口5数据服务器接口10 DNC1/DNC2接口,OSI因 特网12DNC1接口#2 0021 前台输入设备的设定 0022 后台输入设备的设定 0023 后台输出设备的设定(前台与后台同时使用不同的输入输出设备时,作为后台的设备可设定的数值只有0-3。如果使用了正在使用的输入输出设备,将发生报警 P/S 233或BP/S233,同时,注意设定值0和1表示相同的输入输出设备。) 100/3 NCR 程序段结束的输出码O 1 100/5 ND3 DNC运行时:读一段/读至缓冲器满O 1 3.与存储卡接口相关的参数 0300/0 PCM 存储卡接口0:NC端接口1:电脑端接口 4.与FACTOLINK相关的参数(与面板操作相关的参数) 0801/0 SB2 停止位的个数0:一位1:2位 0810/0 BGS 对FACTOLINK报警任务通信,没有显示FACTOLINK屏幕时0:不启动1:启动
FANUC_系统参数及中文解释
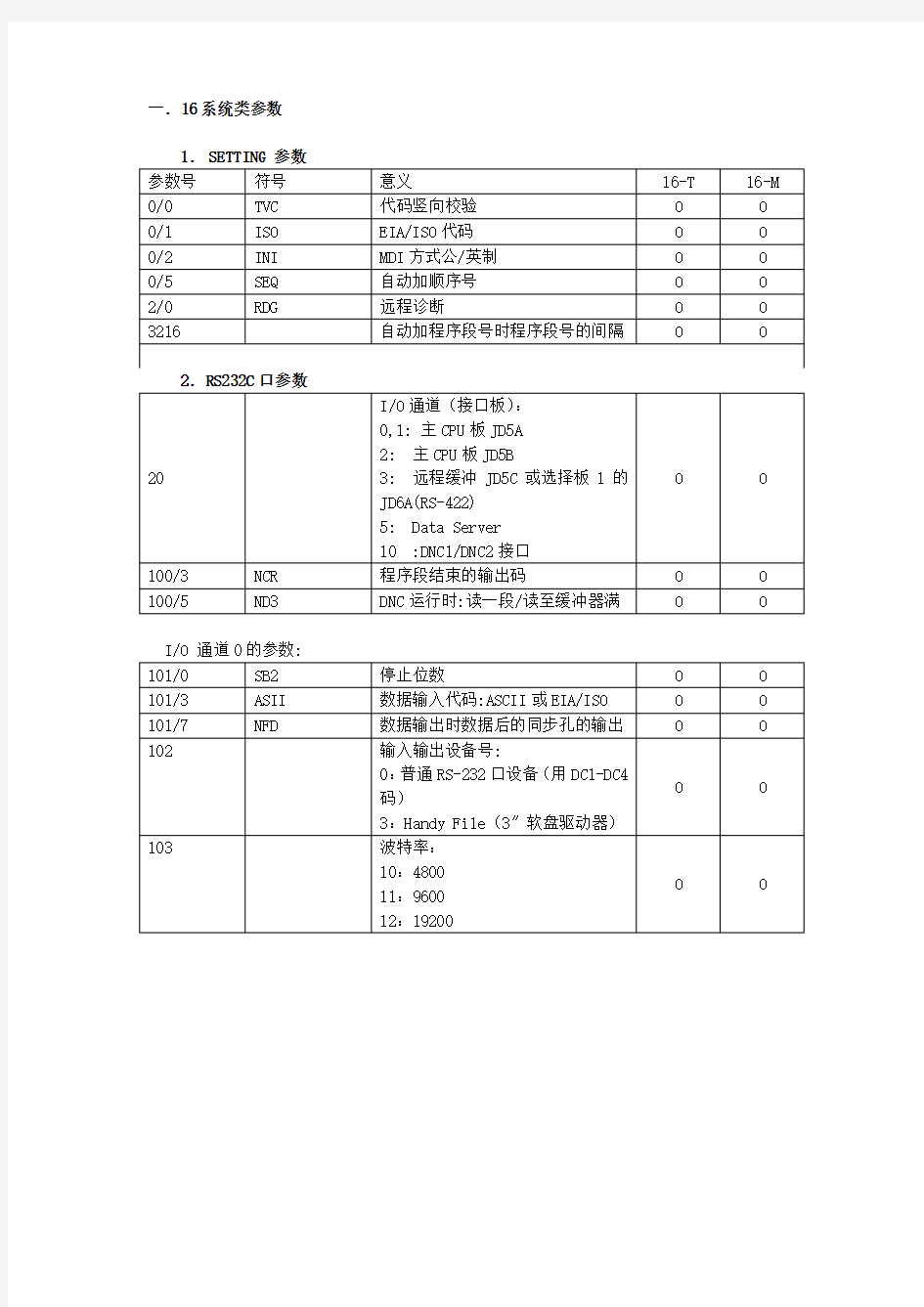
一.16系统类参数 1.SETTING 参数 参数号 符号 意义 16-T 16-M 0/0 TVC 代码竖向校验 O O 0/1 ISO EIA/ISO代码 O O 0/2 INI MDI方式公/英制 O O 0/5 SEQ 自动加顺序号 O O 2/0 RDG 远程诊断 O O 3216 自动加程序段号时程序段号的间隔O O 2.RS232C口参数 20 I/O通道(接口板): 0,1: 主CPU板JD5A 2: 主CPU板JD5B 3: 远程缓冲JD5C或选择板1的 JD6A(RS-422) 5: Data Server 10 :DNC1/DNC2接口 O O 100/3 NCR 程序段结束的输出码 O O 100/5 ND3 DNC运行时:读一段/读至缓冲器满 O O I/O 通道0的参数: 101/0 SB2 停止位数 O O 101/3 ASII 数据输入代码:ASCII或EIA/ISO O O 101/7 NFD 数据输出时数据后的同步孔的输出O O 102 输入输出设备号: 0:普通RS-232口设备(用DC1-DC4 码) 3:Handy File(3″软盘驱动器) O O 103 波特率: 10:4800 11:9600 12:19200 O O
1001/0 INM 公/英制丝杠 O O 1002/2 SFD 是否移动参考点 O O 1002/3 AZR 未回参考点时是否报警(#90号) O 1006/0,1 ROT,ROS 设定回转轴和回转方式 O O 1006/3 DIA 指定直径/半径值编程 O 1006/5 ZMI 回参考点方向 O O 1007/3 RAA 回转轴的转向(与1008/1:RAB 合用) O O 1008/0 ROA 回转轴的循环功能 O O 1008/1 RAB 绝对回转指令时,是否近距回转 O O 1008/2 RRL 相对回转指令时是否规算 O O 1260 回转轴一转的回转量 O O 1010 CNC 的控制轴数(不包括PMC 轴) O O 1020 各轴的编程轴名 O O 1022 基本坐标系的轴指定 O O 1023 各轴的伺服轴号 O O 1410 空运行速度 O O 1420 快速移动(G00)速度 O O 1421 快速移动倍率的低速(Fo) O O 1422 最高进给速度允许值(所有轴一样) O O 1423 最高进给速度允许值(各轴分别设) O O 1424 手动快速移动速度 O O 1425 回参考点的慢速 FL O O 1620 快速移动G00时直线加减速时间常数 O O 1622 切削进给时指数加减速时间常数 O O 1624 JOG 方式的指数加减速时间常数 O O 1626 螺纹切削时的加减速时间常数 O 1815/1 OPT 用分离型编码器 O O 1815/5 APC 用绝对位置编码器 O O 1816/4,5,6 DM1--3 检测倍乘比DMR O O 1820 指令倍乘比CMR O O I/O 通道1的参数: 111/0 SB2 停止位数 O O 111/3 ASI 数据输入代码:ASCII 或EIA/ISO O O 111/7 NFD 数据输出时数据后的同步孔的输出 O O 112 输入输出设备号: 0:普通RS-232口设备(用DC1-DC4码)3:Handy File(3″软盘驱动器) O O 113 波特率:10:4800 11:9600 12:19200 O O 其它通道参数请见参数说明书。 3.进给伺服控制参数
fanuc数控系统参数表
fanuc数控系统参数表 FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。根据多年的实践,对常用的机床参数在维修中的应用做一介绍。 1.手摇脉冲发生器损坏。一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。当时没有合适的备件,可以先将参数900#3置“0”,暂时将手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。等手摇脉冲发生器修好后再将该参数置“1”。 2.当机床开机后返回参考点时出现超行程报警。上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种: (1)若X轴在返回参考点过程中,出现510或是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。若没有问题,则将参数0700或0704数值改为原来数值。 (2)同时按P和CAN键后开机,即可消除超程报警。 3.一台FANUC 0i数控车床,开机后不久出现ALM701报警。从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到同类型风扇,即先将参数RRM8901#0改为“1”先释放 ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为“0”。 4.一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间,发生接触碰撞异响故障。分析故障原因是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。 5.密级型参数0900~0939维修法。按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900~0939必须用MDI方
随机森林原理解释及其中各个参数的含义中文解释 (2)
一、RF原理解释: 首先,从给定的训练集通过多次随机的可重复的采样得到多个bootstrap 数据集。接着,对每个 bootstrap 数据集构造一棵决策树,构造是通过迭代的将数据点分到左右两个子集中实现的,这个分割过程是一个搜索分割函数的参数空间以寻求最大信息增量意义下最佳参数的过程。然后,在每个叶节点处通过统计训练集中达到此叶节点的分类标签的直方图经验的估计此叶节点上的类分布。这样的迭代训练过程一直执行到用户设定的最大树深度(随机森林提出者Breiman采用的是ntree=500)或者直到不能通过继续分割获取更大的信息增益为止,网上的代码中作者都是对树的最大深度设置了最大值。 二、函数,参数的中文解释 function model = classRF_train(X,Y,ntree,mtry, extra_options)随机森林中模型的训练 X,表示输入的数据矩阵 Y输出 Ntree 设置的树的数目 Mtry的默认值为 floor(sqrt(size(X,2)),表示不超过矩阵X列数的二次开根值的整数。extra_options 包含很多控制RF的项 取值为1或0,默认值为1,表示是否做变量替换 表示预先知道的类,函数首先得到一个升序排列的标签然后给先前的类同样的排序。
只在分类器中使用的一个向量,长度等于类的数目。对类的观察值是取对cutoff投票占的的最大比例的一个。 用于分层抽样 样本的长度 表示终端节点的最小值,这个参数设置得越大会使更小的树生长,耗时更少。 判断是否需要对预测器的importance进行评估 决定是否对casewise的重要性度量进行计算 判别是否计算行之间的距离 判断是否计算out-of-bag 如果设定为TRUE,当随机森林运行的时候输出更多冗长的数据。如果设置为一些整数,输出每个追踪树。 通过树的数目矩阵跟踪每个样本在树上的in-bag。 norm_votes 统计每一类的投票数 importance 对于分类器来说是一个列数等于类别数加二,第一列计算精度下降值。在ncalss+1列表示所有类平均精度减少值。最后一列表示Gini指数平均减小值。在随机森林用于回归的应用中importance 表示的含义又不一样,我们只用到分类的作用,所以对回归的含义不做介绍。 importanceSD 标准差 localImp 包含importance标准化残差测量值的矩阵 ntree 生长的树的数目
FANUC 数控系统参数
Fanuc系统参数 一.16系统类参数 1.SETTING 参数 参数号符号意义16-T 16-M 0/0 TVC 代码竖向校验O O 0/1 ISO EIA/ISO代码O O 0/2 INI MDI方式公/英制O O 0/5 SEQ 自动加顺序号O O 2/0 RDG 远程诊断O O 3216 自动加程序段号时程序段号的间隔O O 2.RS232C口参数 20 I/O通道(接口板): 0,1: 主CPU板JD5A 2: 主CPU板JD5B 3: 远程缓冲JD5C或选择板1的JD6A(RS-422) 5: Data Server 10 :DNC1/DNC2接口O O 100/3 NCR 程序段结束的输出码O O 100/5 ND3 DNC运行时:读一段/读至缓冲器满O O I/O 通道0的参数: 101/0 SB2 停止位数O O 101/3 ASII 数据输入代码:ASCII或EIA/ISO O O 101/7 NFD 数据输出时数据后的同步孔的输出O O 102 输入输出设备号: 0:普通RS-232口设备(用DC1-DC4码) 3:Handy File(3〃软盘驱动器)O O 103 波特率: 10:4800 11:9600 12:19200 O O I/O 通道1的参数: 111/0 SB2 停止位数O O 111/3 ASI 数据输入代码:ASCII或EIA/ISO O O 111/7 NFD 数据输出时数据后的同步孔的输出O O 112 输入输出设备号: 0:普通RS-232口设备(用DC1-DC4码) 3:Handy File(3〃软盘驱动器)O O 113 波特率:10:4800 11:9600 12:19200 O O 其它通道参数请见参数说明书。
250B-1参数中文说明rev4
??????????KIMPSION CORPORATION 19644F., No.196, Sec.2, Chung Hsing Rd., Hsien Tien City, Taipei TEL: 886-2-29160715 E-mail: Kimpsion@https://www.360docs.net/doc/282063079.html, FAX: 886-2-2916-070029160726https://www.360docs.net/doc/282063079.html, Revised on 2/18/2005 1.Bin: Bin selected for crystal ?? 2.BT: Blank thickness 3.C0: Static Capacitance 4.C0/C1: Capacity ratio 5.C1: Motional Capacitance 6.CL: Load capacitance for specified frequency ?? 7.DATE: Measurement date stamp ??В 8.DFL: FL@CL1-FL@CL2? 9.DLD1: MaxR/RR ??() 10.D LD2: MaxR-MinR ????? 11.D LD3: FirstR-LastR ???? ? 12.D LD4: MaxR/RR ?????Π?К 13.D LD5: FirstR/LastR ?????К() 14.D LD6: MaxR/MinR ?????К() 15.D LD7: ((MaxR-MinR)/MaxR)*100 DLD2?????? 16.D LDH: DLD Hysteresis MaxR/MinR ???? ?К 17.D LDH2: DLD Hysterisis MaxR-MinR DLD ??R??R? 18.D LDH2P: DLD Power level of Max Hysterisis MaxR-MinR DLD R? R????? 19.D LDHP Show the power of worst Rmax/Rmin DLD(/ )???? 20.D LDF: DLD Frequency at a specific DLD step ?? 21.D LDP: DLD Power output at a specific DLD step ? 22.D LDR: DLD Resistance at a specific DLD step ? 23.F C: Fr/divisor FRа? 24.F DIF: FR-RAWFR or FL-RAWFR (based on first test) 25.F DLD: MaxFR-MinFR ????FR??? 26.F DLDH: DLD Hysteresis MaxFR-MinFR ????FR? ? 27.F FM: Frequency near specified frequency FR 28.F L: FL@CL(Load frequency) (CL) 29.F LR: FL @CL-FR????? 30.F R: Series resonant frequency () 31.F RM: Resistance at specified resonant frequency ?( x3) 32.F RR: FRM/RR????Π?К 33.I: Current into crystal ???? 34.L: Motional inductance 35.L FR: Last FR ????FR? 36.L RR: Last R ????Rr? 37.O T: Overtone
FANUC0系统全参数表资料全
FANUC 0系列参数100-9977 FANUC 0系列参数说明其余参数0100以后 ☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆ ☆ 请注意:以下参数在设定时均按十进制数输入!!! ☆ ☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆☆ 0100 CMRX 0101 CMRZ 0102 CMR3 0103 CMR4 CMRX 、CMRZ 、CMR3、CMR4分别为X 轴、Z 轴、第三轴、第四轴的指令的倍率, 见附表12。 附表12 X 轴、Z 轴、第三轴、第四轴 的指令的倍率 当一任意指令倍率(No.0035 ACMR=1)被用时,有两种设定方式: ①当一个指令倍率是1/2~1/27时; 预设定值= ②当一个指令倍率是2~48时;预设定值=2*(指令倍率) 0108 SPLOW SLOW :主轴速度以恒定速度旋转,或主轴变档速度(当参数No.003 GST=1) 设定码 倍率 1 0.5 2 1 4 2 10 5 20 10
设定值= 设定围0~255r/min 0109 THDCH 在G92螺纹切削循环的倒角宽度的设定。设定围0~127(0.1螺距) 0110 SCTTIM 检查主轴速度到达信号设定的延时时间,这时间的建立是从执行S码开始,主轴速度到达为止的时间,设定围0~255ms。 0111 MBUF1 0112 MBUF2 MBUF1、MBUF2:可最多设定两个其后的程序段不进行缓存处理的M代码。例如:设定了M03时,M03下面的程序段不进缓存区直接处理。 0113 PSORGX 0114 PSORGZ PSORGX、PSORGZ:分别为X、Z轴参考点上的栅格数(0~255)。 0117 OFCMP 0118 TLCMP 0119 OFMAX 0120 TLMAX 与简易刀具寿命管理功能相关的参数: OFCMP:偏置号补偿值,设定值为0~32。 TLCMP:刀具选择号补偿值,设定值为0~99。
FANUC常用系统参数说明
FANUC0 小括号()改为中括号【】将3204中的PAF由0改为1. 释放风扇报警(ALM701参数PRM8901#0(FAN) 08000-08999保密设置NE8(N0.3202#0). 09000-09999保密设置NE9(NO.3202#4). FANUC Series 0i-MD:在显 示器上修改梯图。 按SY STEM!,按右扩展键几次,直到显示器下面出现[PMCCNF时,按[PMCCNF软键,按[设定]软键,在出现的画面上将:编程允许(EDIT ENABLE)内置xx(PROGRAERNABLE)编辑后保存到(WRITETOF-ROM (EDIT) ), 这三项打开即可修改梯图. FANUC Series 0i-MC : 按SY STEM!,按[ > ]软键几次,当出现[PMCPRM软键时按此键,按[SETING ]软键,在出现的画面上将: EDIT ENABLE! 1 WRITE TO F-ROM (EDIT置1 PROGRAMMER ENA B LE 这三项打开即可修改梯图。 这三项只要能置为 1 ,就能进入梯图修改,xx 不了1,就是有参数封
住了,防止别人乱改梯图。对于有密码的,要输入密码才可以看到, 才可以修改。为使用梯形图编辑功能,应该 在“PARAMETERSFOR ONLINE MONITO R中把“ RS-232- C和“F-BUS选择为“ NOT USE , 以使在线监控功能无效。 自动插入顺序号:0000 #5 SEQ 自动插入顺序号增量值:3216 最大主轴转速:3772 加工中心乱刀XX System——参数-----PNMNET----- 数据----- 操作----- 缩放 寻找。 xx 系统D144,主轴25, D145 1POT(1).D146(2)…… 新版本系统D300主轴25, D301 1POT(1).D302 2POT(2)……
Sysbench参数中文解释
Sysbench参数中文解释 # sysbench测试用例:sysbench [general-options]… –test=
FANUC OI MATE TD 系统参数表
FANUC-Oi MC参数表附表3-1 SETTINC参数 参数号及数据位 符号 或设定值 意义 0000#0 TVC 代码垂直校验是否有效 0000#1 ISO 数据输出代码选择:EIA/ISO 0000#2 INI 输入单位选择:米制/英制 0000#5 SEQ 自动插入程序段号 0001#1 FVC 纸带格式 0002#0 RDG 远程诊断 0002#7 SJZ 手动返回参考点的设定 0012#0 MIRx 各轴的镜像设定 0012#4 AICx 轴指令的移动量的设定 0012#7 RMVx 各轴是否执行脱离 0020 0,1 RS-232C串行口1 0020 2 RS-232C串行口2 0020 4 存储卡接口 0020 5 数据服务器接口 0020 6 运行DNC或由FOCAS/Ethernet指定的M198 0020 10 DNC2接口 0020 20~35 组0-15,CNC和Power Mate CNC之间经FANUC I/O LINK 进行数据传输。 0021 设定前后输出设备 0022 设定后台输入设备 0022 设定后台输出设备 附表3-2 通道共用参数 参数号符号 或设定值 意义 024 0 根据PMC在线监控画面的设定 024 1 RS-232C串行端口1(JD36A) 024 2 RS-232C串行端口2(JD36B) 024 10 高速接口(HSSB (COP7)或以太网) 024 11 高速接口或RS-232串行端口1(JD36A) 024 12 高速接口或RS-232串行端口2(JD36B) 0100#1 CTV 程序注释部分文字的TV校验
FANUC维修中常用参数
FANUC维修中常用参数 FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。根据多年的实践,对常用的机床参数在维修中的应用做一介绍。 1. 手摇脉冲发生器损坏。一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。当时没有合适的备件,可以先将参数900#3置“0;'暂时将 手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。等手摇脉冲发生器修好后再将该参数置“伫 2. 当机床开机后返回参考点时出现超行程报警。上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种: (1) 若X轴在返回参考点过程中,出现510或就是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。若没有问题则将参数0700或0704数值改为原来数值。 (2) 同时按P与CAN键后开机,即可消除超程报警。 3. 一台FANUC 0i数控车床,开机后不久出现ALM701报警。从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到同类型风扇,即先将参数RRM8901#0改为“1先释放ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为W 4. 一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间发生接触碰撞异响故障。分析故障原因就是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。 5. 密级型参数0900?0939维修法。按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900?0939必须用MDI方式输入很不方便。现介绍一种可以传输包含密级型参数0900?0939在内的传输方法,步骤如下: (1) 将方式开关设定在EDIT位置; (2) 按PARAM键,选择显示参数的画面; (3) 将外部接收设备设定在STAND BY (准备)状态; (4) 先按EOB键不放开,再按OUTPOT键即将全部参数输出。 6. 一台FANUC 0MC立式加工中心,由于绝对位置编码电池失效,导致X、Y、Z丢失参考点,必须重新设置参考点。 (1) 将PWE“ 0”改为“1,'更改参数NO、76、1=1,NO、22改为,此时CRT显示“ 300>警即X、Y、Z轴必须手动返回参考点。 (2) 关机再开机,利用手轮将X、Y移至参考点位置,改变参数NO、22为,则表示X、Y已建立了参考点。 (3) 将Z轴移至参考点附近,在主轴上安装一刀柄,然后手动机械手臂,使其完全夹紧刀柄。此时将参数NO、22改为,即Z轴建立参考点。将NO76、1设“00,'PWE改为0。
FANUC常用参数说明
包括运行速度,到位宽度,加减速时间常数,软限位,运行 关的参数等,参照如下常用参数表(表2)设定。 表2常用参数说明 参数含义 FS-OI MA/MB FS-OI-Mate-MB FS-16/18/21M FS-16I/18I/21IM FS-OI TA/TB FS-OI-Mate-TB FS-16/18/21T FS-16I/18I/21IT PM-O 备注 (一般设定值) 程序输出格式为 ISO 代码 数据传输波特率 103,113 I/O 通道 20 20 用存储卡 DNC 138#7 0000#1 0000#1 1 103,113 10 0为 232口,4为存储卡 138 1 可选 DNC 文件 直线轴 /旋转轴 1006#0 1006#0 旋转轴为 1 半径编程 /直径编程 1006#3 车床的 X 轴 参考点返回方向 1006#5 1006#5 0: +, 1: - 轴名称 1020 1020 88(X) , 89(Y) , 90(Z) , 65(A) , 66(B) , 67(C) 轴属性 1022 1022 1,2,3 轴连接顺序 1023 1023 1,2,3 存储行程限位正极限 1320 1320 调试为 99999999 存储行程限位负极限 1321 1321 调试为 -99999999 未回零执行自动运行 1005#0 1005#0 调试时为 1 未回零执行手动快速 1401#0 1401#0 调试为 1 空运行速度 1410 1410 1000 左右 各轴快移速度 1420 1420 8000 左右 最大切削进给速度 1422 1422 8000 左右 各轴手动速度 1423 1423 4000 左右 各轴手动快移速度 1424 1424 可为 0,同 1420 各轴返回参考点 FL 速度 1425 1425 300-400 快移时间常数 1620 1620 50-200 切削时间常数 1622 1622 50-200 JOG 时间常数 1624 1624 50-200 1815#1 1815#1 全闭环 1 /停止时的位置偏差,和显示有 电机绝对编码器 1815#5 1815#5 伺服带电池 1 各轴位置环增益 1825 1825 3000 各轴到位宽度 1826 1826 20-100 分离型位置检测器
西门子 D各参数中文含义
siemens 840d参数中文含义 840d中文参数 [sell=200] 10000 机床轴名称 10002 nck机械轴的逻辑图 10008 plc 控制的轴的最大号码 10010 方式组的通道有效 10050 基本系统循环时间 10059 profibus 报警标识符(只对内部) 10060 位置控制循环系数 10061 位置控制循环 10062 位置控制循环延迟 10065 位置设定延迟 10070 插补运算器的周期系数 10071 插补循环 10072 通讯任务周期的系数 10074 plc任务比插补任务的系数10075 plc循环时间 10080 取样实际值分配系数 10082 速度设定输出的超前时间10083 位置控制器输出保持时间的偏置10085 中断程序段监控时间(失效-激活) 10088 重新启动延迟 10089 缺少总线时脉冲抑制的等待时间10090 监控周期的系数 10091 检查周期时间的显示 10092 安全数据再确认循环时间显示10093 spl文件存取号 10094 安全报警禁用级 10095 安全方式屏蔽 10096 安全诊断功能 10097 对于 spl-差额停止反应 10098 profisafe 通讯的系数 10099 profi安全通讯循环时间 10100 最大plc周期 10110 plc确认的平均时间 10120 plc启动的监控时间 10130 与mmc通讯的时间限制 10131 过载时屏幕更新处理 10132 在零件程序中监控时间mmc命令10134 同时发生的mmc节点数量10136 pcs位置的显示方式 10140 与驱动通讯的时间限制 10150 与驱动通讯的系数 10160 与mmc通讯的系数
FANUC常用系统参数说明
FANUC0 小括号()改为中括号【】将3204中的PAR由0改为1. 释放风扇报警(ALM701)参数PRM8901#0(FAN) O8000-O8999保密设置NE8(NO.3202#0). O9000-O9999保密设置NE9(NO.3202#4). FANUC Series Oi-MD: 在显示器上修改梯图。 按SYSTEM键,按右扩展键几次,直到显示器下面出现[PMCCNF]时,按[PMCCNF]软键,按[设定]软键,在出现的画面上将:编程允许(EDIT ENABLE),内置编程器许可(PROGRA MM ER ENABLE),编辑后保存到快闪存储器(WRITE TO F-ROM (EDIT)), 这三项打开即可修改梯图. FANUC Series Oi-MC : 按SYSTEM 键,按[ > ] 软键几次,当出现[PMCPRM]软键时按此键,按[SETING]软键,在出现的画面上将:EDIT ENABLE置1 WRITE TO F-ROM (EDIT)置1 PROGRAMMER ENABLE 置1 这三项打开即可修改梯图。
这三项只要能置为1 ,就能进入梯图修改,若置不了1,就是有参数封住了,防止别人乱改梯图。对于有密码的梯形图,要输入密码才可以看到,才可以修改。为使用梯形图编辑功能,应该在“PARAMETERS FOR ONLINE MONITOR”中把“RS-232-C”和“F-BUS”选择为“NOT USE”,以使在线监控功能无效。 自动插入顺序号:0000 #5 SEQ 自动插入顺序号增量值:3216 最大主轴转速:3772 加工中心乱刀修正 System------参数-----PNMNET-----数据-----操作-----缩放-----寻找。 旧版本系统D144,主轴25,D145 1POT(1).D146(2)……新版本系统D300主轴25,D301 1POT(1).D302 2POT(2)……
FANUC 常用参数及分类
FANUC 常用参数及分类 参数在NC系统中用设定NC数控机床及辅助设备的规格和内容,及加工操作所必需的一些数据。机床厂家在制造机床、最终用户在使用过程中,通过参数的设定,来实现对伺服驱动、加工条件、机床坐标、操作功能、数据传输等方面的设定和调用。 机床厂商、用户在配备、使用FANUC系统时,根据具体的使用状况,有大量的参数需要调整和设置。在使用和调整这些参数是有必要搞清楚这些参数的用途和设置方法。在下文中介绍一些有关FANUC系统参数的常识和一些常用参数。 表3-2FANUC系统参数类型列表 数据形式 位型0或1 位轴型 字节型-128`127 0~256 有些参数中不使用符号 字节轴型 字型-32768~3276 0~65535 有些参数中不使用符号 字轴型 双字型-99999999~99999999 双字轴型 FANUC系统参数分类 按照数据形式参数可以分为下表所表示的类别: 1、对于位型和位轴型参数,每个数据号由8位组成,每一位有不同的意义。 2、轴型参数允许参数分别设定给每个控制轴。 3、每个数据类型有一个通用的有效范围,参数不同其数据范围也不同。 为了进一步说明这两类数据在数据设定方面的区别,特举如下两个例子:1、位型和位轴型参数举例 1000 # 7 # 6 # 5 # 4 #3 #2 #1 #0 数据号S E Q INI ISO TV C 数据 内容 通过该例可以知道位型和位轴型的数据格式,它们都是每一个数据号由0~7位数据组成。在描述这一类数据时可以用这样的格式来说明:数据号.位号。比如上例中的ISO参数就可以用这样的符号来表示:1000.1。1000.1=0时表示数据采用EIA码输出,1000.1=1时表示数据输出采用ISO码。位型和位轴型数据就是用这样的方式来设定不同的系统功能。 2、位型和位轴型以外的数据 1023 指定轴的伺服轴号 数据号数据内容
2021年发那科系统参数总表
发那科系统参数 欧阳光明(2021.03.07) 系统参数不正确也会使系统报警。另外,工作中常常遇到工作台不能回到零点、位置显 示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC信号或连线无误,应检查有关参数。 一.16系统类参数 0:OFF 1:ON 1. SETTING 参数(与设定相关的参数) 参数号符号意义 16-T 16-M 0000/0 TVC 代码竖向校验 O:不进行 1:进行 0000/1 ISO EIA/ISO代码 O:EIA代码 1:ISO代码0000/2 INI MDI方式公/英制 O:米制 1:英制 0000/5 SEQ 自动加顺序号 O:不进行 1:进行 0002/0 RDG 远程诊断 O不进行 1进行 0002/7 SJZ 手动参考位置返回 0参考位置未确定时,使用减速挡块进行参考位置返回,参考位置已经确定时,与减速挡块无关,用快速移动定位到参考位置。 1只用减速挡块进行参考位置返回。 0012/0 MIRx 各轴镜像的设定 0关闭 1开启 0012/4 AIC 轴命令的移动距离 0依照指定的地址 1总为增量命令 0012/7 RMVx 各轴的受控轴拆除设定 0不拆除受控轴 1拆除受控轴 3216 自动加程序段号时程序段号的间隔 O 1 2.RS232C口参数 0020 此参数用于设定与连接在哪个接口上的输入输出设备之间进行数据的输入输出。0,1RS-232-C串行端口 1 2 RS-232-C串行接口2 3遥控缓冲器接口4存储卡接 口5数据服务器接口10 DNC1/DNC2接口,OSI因 特网12 DNC1接口#2
西门子数控参数中文解释
西门子数控参数中文解释1. 通用参数 234 Allgemeine Maschinendaten 10000 机床轴名称 10010 方式组的通道有效 10050 基本系统时钟周期时间 10060 位置控制周期的系数 10070 插补运算器的周期系数 10072 通讯任务周期的系数 10074 PLC任务比插补任务的系数 10080 实际值采样分隔系数 10082 位置控制器输出保持时间的偏置 10083 位置控制器输出的最大改变值 10085 中断块的监控时间 10090 监控周期的系数 10091 检查周期时间的显示 10092 交*检查周期时间的显示 10100 最大PLC周期 10110 PLC确认的平均时间 10120 PLC启动的监控时间 10130 与MMC通讯的时间限制 10132 零件程序中MMC命令的监控时间10134 MMC可以同时通讯的节点的数量10140 与驱动通讯的时间限制
10150 与驱动通讯的系数 10160 与MMC通讯的系数 10170 MMC任务的启动时间限制10180 MMC任务到准备任务的系数. 10190 模拟的换刀时间 10200 线性位置的计算精度 10210 角度位置的计算精度 10220 生效比例系数 10230 机床数据比例系数 10240 基本公制长度单位 10250 INCH的转换系数 10300 NCK的模拟输入数 10310 NCK的模拟输出数 10320 NCK模拟输入的比例 10330 NCK模拟输出的比例 10340 预留: 10350 NCK数字输入字节的数量10360 NCK数字输出字节的数量10361 开关量输入输出短路 10362 NCK模拟输入的配置 10364 NCK模拟输出的配置 10366 10368 NCK数字输出的配置 10380 更新NCKI/O设备
fanuc数控系统常用参数表
fanuc数控系统参数表 2010-07-16 14:01 FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。根据多年的实践,对常用的机床参数在维修中的应用做一介绍。 1.手摇脉冲发生器损坏。一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。当时没有合适的备件,可以先将参数900#3置“0”,暂时将手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。等手摇脉冲发生器修好后再将该参数置“1”。 2.当机床开机后返回参考点时出现超行程报警。上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种:(1)若X轴在返回参考点过程中,出现510或是511超程报警,可将参数0700LT1X1数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。若没有问题,则将参数0700或0704数值改为原来数值。 (2)同时按P和CAN键后开机,即可消除超程报警。 3.一台FANUC 0i数控车床,开机后不久出现ALM701报警。从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到
同类型风扇,即先将参数RRM8901#0改为“1”先释放ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为“0”。 4.一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间,发生接触碰撞异响故障。分析故障原因是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。 5.密级型参数0900~0939维修法。按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900~0939必须用MDI方式输入很不方便。现介绍一种可以传输包含密级型参数0900~0939在内的传输方法,步骤如下: (1)将方式开关设定在EDIT位置; (2)按PARAM键,选择显示参数的画面; (3)将外部接收设备设定在STAND BY(准备)状态; (4)先按EOB键不放开,再按OUTPOT键即将全部参数输出。 6.一台FANUC 0MC立式加工中心,由于绝对位置编码电池失效,导致X、Y、Z丢失参考点,必须重新设置参考点。
发那科系统基本参数设定
维修培训实习教材 第二节 基本参数设定 一 实习目的 (一) 掌握 FANUC 数控系统的参数输入方法 (二) 掌握 FANUC 数控系统的参数设定步骤 (三) 掌握 机床运行所需要设定的最基本参数 二 实习内容 学习“参数设定支持画面”中每一项的设定 三 实习步骤 有关参数设定的说明: 对于FANUC 数控系统,其参数的数目是很大的,想对每一位参数都进行掌握和设定是很困难的。事实上,对FANUC 数控系统参数,并不是需要对其输入某个数值才称之为设定参数。大部分的位型参数,设为0时反而是有效的,设为0反而是很多机床默认的习惯状态。这点在进行参数学习时要清楚。 具体步骤: (一)系统通电,将 “参数可写入” 开关打开。 (二)系统断电,重新开机,开机的同时按住 [RESET] 功能键直到系统进入正常画面, 其结果是系统参数被清除,但系统功能参数(也叫保密参数)(NO.9900-9999)不被清除,如果是新版系统,系统功能参数(也叫保密参数)存在于系统软件中,也不会被清除。所以,此项操作仅会清除系统功能参数(也叫保密参数)之外的普 通参数 (三)按 [SYSTEM] 功能键,然后按扩展软键 [+] 几次,直到出现参数设定支持画 面的软键 [PRMTUN] 。
进入参数设定支持画面(按软键[PRMTUN])。 画面中的项目就是参数的设定调试步骤。这次着重学习第一项 “ AXIS SETTING (轴设定)”项 和 最后一项“ MISCELLANY (其它)”项,参数设定支持画面里的其他项(伺服参数设定,主轴设定等)将在别的课时里学习。 (四)按照顺序设定这两项参数。 第一项: AXIS SETTING (轴设定)项,轴设定里面有以下几个组,对每一组参数进行设定。