红外测距传感器:Sharp
红外测距传感器:Sharp红外传感器的原理以及使用技巧
2009-02-23 21:20
在过去几年中,Sharp开发了很多种红外距离传感器。这些传感器不但体积小,功耗也很低。这篇文章就简单的介绍一下这些传感器的不同点,使用方法,接口方法以及一些使用上的小技巧。
工作原理:
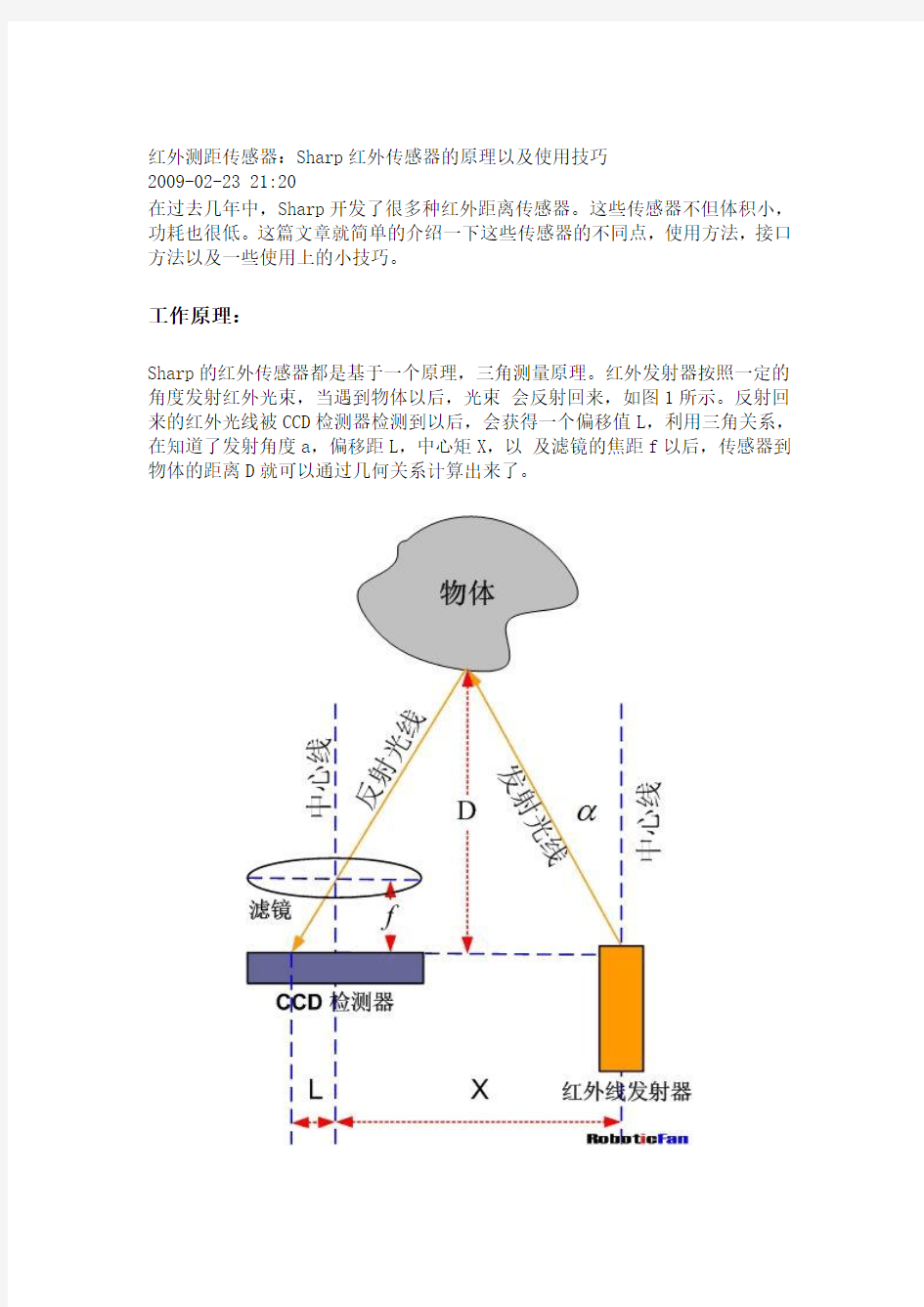
Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。
图1:三角测量原理
可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小。这时CCD检测器能否分辨得出这个很小的L值成为关键,也就是说CCD 的分辨率决定能不能获得足够精确的L值。要检测越是远的物体,CCD的分辨率要求就越高。
非线性输出:
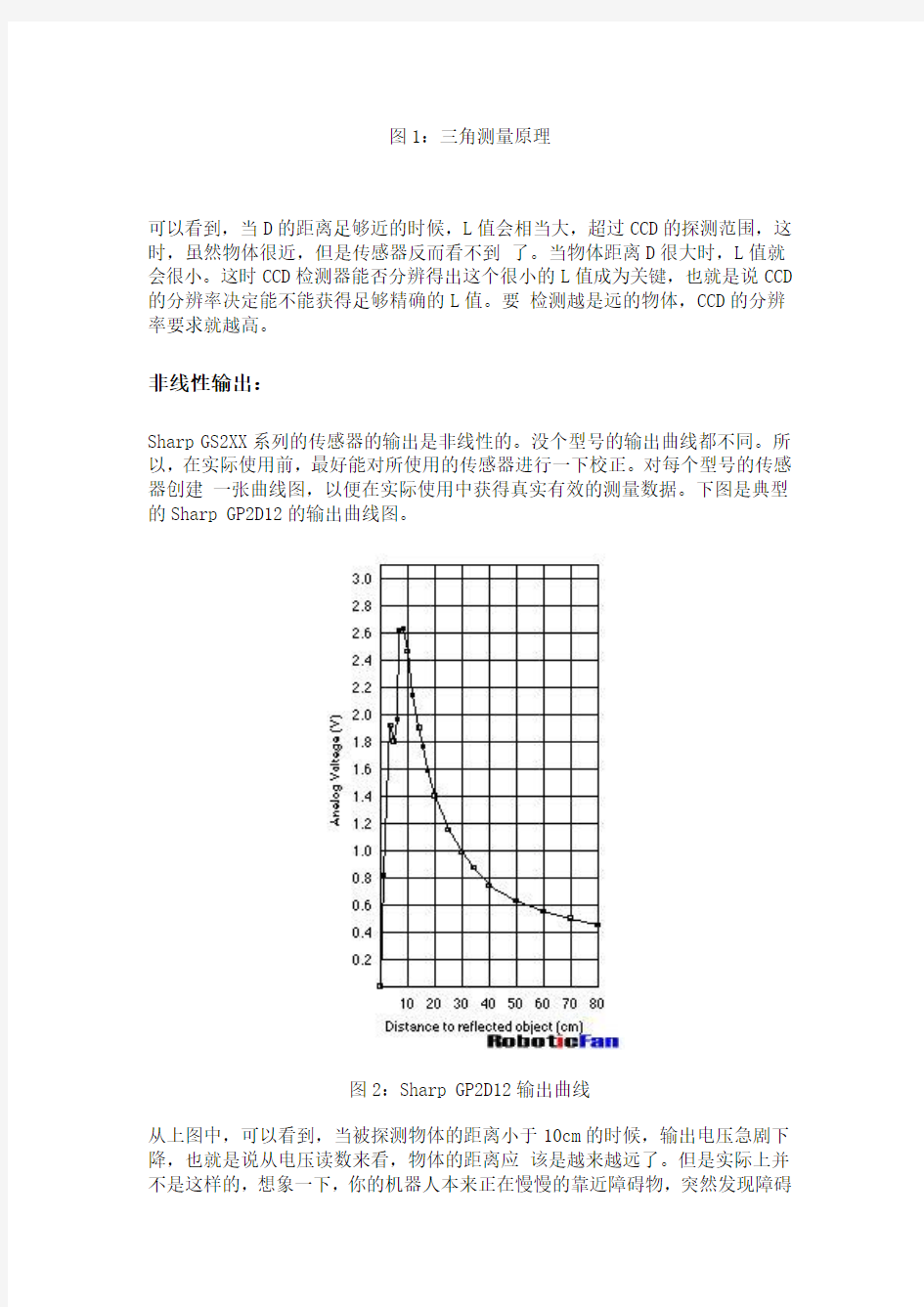
Sharp GS2XX系列的传感器的输出是非线性的。没个型号的输出曲线都不同。所以,在实际使用前,最好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。下图是典型的Sharp GP2D12的输出曲线图。
图2:Sharp GP2D12输出曲线
从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍
物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。当然了,解决这个方法也不是没有,这里有个小技巧。只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。如图3所示:
图3:可以避免探测误差的安装图示
型号对比:
目前Sharp的红外线传感器有如下几种类型:
GP2D02 (串口输出)探测范围 10cm-80cm
GP2D05 (数字输出)探测范围固定的24cm
GP2D12 (模拟输出)探测范围 10cm-80cm
GP2D15 (数字输出)探测范围 24cm
GP2D120 (模拟输出)探测范围 4cm-30cm
GP2YOAO2YK (模拟输出)探测范围 20cm-150cm
GP2Y0D02YK (数字输出)探测范围 80cm
所有的模拟输出,其输出电压和距离成反比,数字输出只能检测在范围内物体是存在还是不存在,而不能提供距离的检测。
sharp红外测距传感器
红外测距传感器:Sharp红外传感器的原理以及使用技巧 2009-02-23 21:20 在过去几年中,Sharp开发了很多种红外距离传感器。这些传感器不但体积小,功耗也很低。这篇文章就简单的介绍一下这些传感器的不同点,使用方法,接口方法以及一些使用上的小技巧。 工作原理: Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。
图1:三角测量原理 可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小。这时CCD检测器能否分辨得出这个很小的L值成为关键,也就是说CCD 的分辨率决定能不能获得足够精确的L值。要检测越是远的物体,CCD的分辨率要求就越高。 非线性输出: Sharp GS2XX系列的传感器的输出是非线性的。没个型号的输出曲线都不同。所以,在实际使用前,最好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。下图是典型的Sharp GP2D12的输出曲线图。 图2:Sharp GP2D12输出曲线 从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍
超声波测距传感器(硬件件篇)
自制一个由你掌控的 —— 超声波测距传感器(硬件篇) 一、背景 四年多前,我曾尝试自己制作一个超声波测距传感器。 当时是想为 LEGO 的 RCX 配套,因为我是Semia 的技术支持,那时RCX 还没有配置任何测距传感器。由于可查阅的资料有限,且不详细,最后以失败告终 /(也许在网络搜索上我属于“菜鸟”)。 为了达到目的,只好选用了 Sharp 公司的 GP2D12。但自制超声波测距传感器的愿望一直没被遗忘。一是觉得超声波用于测距从原理上讲应该效果不错(GP2D12的测距范围太小,只有 10 — 80 cm);二是市售成品不够灵活,为了适应它还得做转换接口,费力耗财。 前段时间协助一个单位搞项目,涉及到超声波测距;有幸的是解剖了一款进口的超声波测距传感器 —— SensComp公司的6500,使我对相关原理和技术有了比较透彻的了解。 本想项目结束后立刻动手设计一个自己的传感器,后因忙于“圆梦小车”耽搁了。 现在圆梦小车已初具雏形,可以腾出一点时间,而且小车也需要一些传感器与之配套,便着手实现了这个夙愿。
基于嵌入之梦工作室的宗旨 —— 为学习单片机的大学生服务,将设计和制作的细节与大家分享,希望能有助于读者做出属于你自己的超声波传感器,也让和我有类似想法的人不至于再次失望于网络。 二、需求分析 ?能在测距范围上弥补 GP2D12 的不足,将距离延伸到 80cm以外; ?可以提供给大学生和爱好者 DIY,具有学习功能; ?方便自己随时修改程序,使学习的作用得以充分发挥; ?成品具有一定的使用价值,可方便的应用于小车等需要测距的装置上。 三、概要设计 总体设计参照 SensComp公司(https://www.360docs.net/doc/2d8429685.html,)6500测距模块,其核心是两片专用的超声波测距IC:TL851和TL852。 TL852是一片专门设计用于超声波接收、放大、检测的芯片,集成了可变增益、选频放大器,可通过四根控制线变换11级增益,对于检测超声波信号十分有效。 TL851 与TL852 配套,它可实现超声波发射及控制TL852的增益变换,通过定时控制增益,使TL852的增益与回波时间相匹配,一方面提高了检测的灵敏度,同时减小了干扰。 如果不能随时间变换增益,为增加检测距离,就需要加大灵敏度;而开始时灵敏度就很高,无疑会收到一些不想要的信号。(6500测距模块的相关资料及芯片资料见附件) 解剖此模块时,对TL852的功能十分感兴趣,当初我制作时就是“栽”在这个环节;而TL851的功能基本属数字控制范畴,输出还需要配合单片机才能得到结果,接口也不是十分灵活,笔者认为完全可以用单片机替代。 所以,本次设计的主要改变就是用单片机替换6500模块的TL851。 单片机还是选用圆梦小车所用的STC12系列,一是考虑是51兼容,符合国内多数教材;二是下载程序方便。此次选用的是 STC12LE4052(4K FlashROM,256 RAM)。考虑体积因素,选择了SOP20封装。
GP12D夏普红外线传感器
Arduino&GP2D12红外线测距传感器 [ 2008/6/14 19:50:00 | By: wxxmickey ] 3 推荐 最近忙生活琐事,很少搞这些小东东,今天闲了一下就发表一个Arduino控制GP2D12的小实例,仅供大家参考! 器材:Arduino开发板,GP2D12,1602字符液晶,连接线若干。 Arduino开发板和1602字符液晶我就不多介绍了,前面都提到过。 GP2D12是日本SHARP公司生产的红外距离传感器,价格便宜,测距效果还不错,主要用于模型或机器人制作。 技术规格如下: 探测距离:10-80cm 工作电压:4-5.5V 标准电流消耗:33-50 mA 输出量:模拟量输出,输出电压和探测距离成比例 从曲线图中我们可以看出,输出电压并非是线性的,所以这个测距也就只能测个大概,如果要精度高的话就
需要做非线性校正,这里我们就不讨论这个问题了。 实验原理: GP2D12根据距离的远近输出相应的电压,经Arduino开发板0号模拟口输入,转换成数字量,根据公式计算得到需要显示的数据。 实验原理图: 实验实物图:
没有障碍物,显示范围超出。
有障碍物时显示测量距离。
经实验,需要在GP2D12的电源端加个10UF以上的电解电容,稳定供电电压,以保证输出模拟电压更稳定。实验代码: /********************************************************************/ int GP2D12=0; int ledpin = 13; int LCD1602_RS=12; int LCD1602_RW=11; int LCD1602_EN=10; int DB[] = {6, 7, 8, 9}; char str1[]="https://www.360docs.net/doc/2d8429685.html,"; char str2[]="Renge:00cm"; char str3[]="Renge Over"; /********************************************************************/ /********************************************************************/ void LCD_Command_Write(int command) { int i,temp; digitalWrite( LCD1602_RS,LOW); digitalWrite( LCD1602_RW,LOW); digitalWrite( LCD1602_EN,LOW); temp=command & 0xf0; for (i=DB[0]; i <= 9; i++) {
基于单片机的红外测距系统设计-开题报告
武汉大学珞珈学院本科生毕业论文(设计)开题报告 论文题目:基于单片机的红外测距系统设计 系:电子信息科学系学号: 20100802041 姓名:钱源 一、论文选题的目的和意义 红外线是不可见光,是电磁波的一种形式,可以用来进行距离的测量,其应用历史可以追溯到上世纪60年代。现代科学技术的发展进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。其中激光测距是靠激光束照射在物体上反射回来的激光束探测物体的距离。由于受恶劣的天气、污染等因素影响,使反射的激光束在一定功率上探测距离比可能探测的最大距离减少一半左右,损失很大,影响探测的精确度;微波雷达测距技术为军事和某些工业开发采用的装备和振荡器等电路部分价格昂贵,现在几乎还没有开拓民用市场;超声波测距在国内外已有人做过研究,由于采用特殊专用组件使其价格高,难以推广;红外线作为一种特殊的光波,具有光波的基本物理传输特性—反射、折射、散射等,且由于其技术难度相对不太大,构成的测距系统成本低廉,性能优良,便于民用推广。另外红外测距的应用越来越普遍。在很多领域都可以用到红外测距仪。红外测距一般具有精确度和分辨率高、抗干扰能力强、体积小、重量轻等优点,因而应用领域广、行业需求众多,市场需求空间大。 红外测距的研究就非常有意义了。红外线测距仪指的就是激光红外线测距仪,红外测距仪----用调制的红外光进行精密测距的仪器,测程一般为1-5公里。在100米以内则超声波测距更有优势,但是超声波测距的距离一般无法测量1米以内,而红外测距则可以这一段距离的不足,而且有着不错的精度,在本课题中研究的就是这一类情况的红外线测距。 二、国内外关于该论题的研究现状和发展趋势 (1)国内: 根据《国内近年来红外光电测距仪的发展情况》,随着国家对外开放政策的实施和测量工作的需要,近年来国内一些光学仪器厂和电子仪器厂分别从瑞典、瑞士和日本等国引进几种红外测距仪组装线,组装测距仪,我国有关工厂和院校近年来也研制出一些产品。由于微处理机在国产测距仪上的应用,大大缩小了仪器的体积,同时也减少了出故障的几率,使得国产测距仪的性能和质量都较过去有很大的提高。在国家“六·五”计划攻关中,常州第二电子仪器厂研制的DCHZ 型多功能红外测距仪就是一个很好的例证。该产品经国家测绘局测绘科学研究所光电测距仪检测巾心进行全面质量鉴定后认为:该仪器外型美观、体积小、重量
红外测距传感器的原理与设计最终版
红外测距传感器的原理与设计 摘要:现代科学技术的发展,进入了许多新领域,而在测距方面先后出现了激光测距、微波雷达测距、超声波测距及红外线测距。为了实现物体近距离、高精度的无线测量,我采用红外发射接收模块作为距离传感器,单片机作为处理器,编写A/D转换、显示以及与PC机的通信程序,开发了一套便推式的红外距离测量系统,系统可以高精度的实时显示所测的距离,并且可以将距离量通过串口发送到PC机显示处理、本系统结构简单可靠、体积小、测量精度高、方便使用,另外本系统形成了一套完善的软硬件开发平台,可以进行扩展、移植和做进一步的开发。 关键词:红外测距;68HC11E1;A/D转换;
目录 一、绪论 (1) 1.1设计背景 (1) 1.2红外线简介 (1) 1.3红外线传感器概述 (2) 1.3.1 红外线传感器系统介绍 (2) 1.3.2 红外线传感器的分类 (4) 1.3.3 红外线传感器的应用 (7) 二、红外测距的方法和原理 (8) 2.1几种红外测距原理及选择 (8) 2.1.1 相位测距原理 (8) 2.1.2 PSD测距原理 (11) 2.1.3 带运动机构的双象比较法原理 (11) 2.1.4 时间差测距法原理 (11) 2.1.5 反射能量法原理 (11) 2.1.6 红外测距原理的选择 (12) 2.2红外测距系统的工作原理 (12) 三、红外测距的基本结构及系统框图 (13) 3.1红外测距的过程 (13) 3.2红外测距系统框图 (14) 3.3主要元件分析 (14) 3.3.1 红外线发射器件 (14) 3.3.2红外线光敏二极管 (15) 四、红外测距硬件电路设计 (17) 4.1单片机最小系统 (17) 4.2红外发射电路设计 (19) 4.3红外接收放大电路设计 (21) 4.4电源电路 (23) 4.5数码管显示电路 (27) 五、软件模块设计 (28) 5.1程序设计步骤 (28) 5.2软件设计框图: (29) 5.3红外测距A/D转换程序 (29) 六、测量精度分析 (31)
实验二红外测距传感器实验
信息工程学院实验报告 课程名称: 传感器原理及应用 实验项目名称: 实验二 红外测距传感器实验 实验时间: 班级: 姓名: 学号: 一、实 验 目 的 1. 学习 CC2530 单片机 ADC 模块的使用。 2. 学习红外测距传感器的使用。 二、实 验 原 理 1. CC2530 节点与红外测距传感器的硬件接口 红外线测距传感器模块GP2Y0A21YK0F
(1). 红外测距传感器模块(GP2Y0A21YK0F)引脚 OUT:模拟量输出接口(AD 模块) GND:外接GND VCC:数字量输出接口(0 和1) 外接5V 电源 (2). 传感器模块与CC2530 模块之间的连接 2. ADC (1). 简介 CC2530单片机的ADC支持多达14位的模拟数字转换,具有多达12位的ENOB(有效数字位)。它包括一个模拟多路转换器,具有多达8个各自可配置的通道;以及一个参考电压发生器。转换结果通过DMA写入存储器。还具有若干运行模式。ADC模块的方框图如下所示: ADC的主要特性如下:
●可选的抽取率,这也设置了分辨率(7到12位) ●8个独立的输入通道,可接受单端或差分信号 ●参考电压可选为内部单端、外部单端、外部差分或A VDD5 ●产生中断请求 ●转换结束时的DMA触发 ●温度传感器输入 ●电池测量功能 (2). 寄存器简介 本次实验中主要涉及到ADC模块的寄存器:
数据的换算: 例如:在CC2530 中配置ADC 的参考电压为A VDD5(3.3V),抽取率为512(12 位有效数据),由于在实验中采用单端转换方式,所以实际数据只有11 位。这时,ADC 采集到的数据记为x,则 ADC采集数据转换为电压(单位:V):V = x * 3.3 / 2048 3. GP2Y0A21YK0F 红外测距传感器 (1). 概述 夏普GP2Y0A21YK0F 测距传感器是基于PSD 的微距传感器,其有效的测量距离在80cm 内,有效的测量角度大于40 度,输出信号为模拟电压,在0 到8cm 左右的范围内与距离成正比非线性关系,在10-80cm 的距离范内成反比非线性关系,平均功耗为30mA,反应时间约为5ms,并且对背景光及温度的适应性较强。GP2Y0A21YK0F 传感器的默认的测距分辨率为1mm。
红外测距及其应用研究
编号 南京航空航天大学 毕业论文题目红外测距及其应用研究 学生姓名王程一 学号030810217 学院自动化学院 专业自动化 班级0308102 指导教师章海清副教授 二〇一二年六月
南京航空航天大学 本科毕业设计(论文)诚信承诺书 本人郑重声明:所呈交的毕业设计(论文)(题目:红外测距及其应用研究)是本人在导师的指导下独立进行研究所取得的成果。尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。 作者签名:年月日(学号):
红外测距及其应用研究 摘要 红外测距、超声波测距和激光测距为目前测距领域三大测距方式。本文主要研究利用红外测距对某种密闭容器内的液体高度进行检测的可行性。GP2Y0A21红外测距传感器是夏普公司生产的,十分常用的一款传感器。它采用了三角测量原理,具有很强的适应性与抗干扰性,目前主要运用于机器人、壁障小车等作为辅助传感器使用。但作为一种测距传感器却几乎没有人研究过其测距特性。结合毕业设计所要达到的目的,搭建实验平台,创建实验环境,用大量的实验说明其测距特性,应用范围。再引入单片机,构建基于GP2Y0A21红外测距传感器的测距系统,对传感器的输出型号进行线性化、滤波等处理,最终于数码管上显示较为精确的测距结果。最后将其应用到液体液面,并在其中间加装玻璃板,已验证其对密闭容器内的液体液面高度检测的可行性。 关键词:红外测距,三角测量,线性化,滤波。
Infrared Distance Measurement and Its Application Abstract Infrared ranging,ultrasonic ranging,and laser ranging is three ranging way in ranging field. This paper studies the use of infrared distance the height of liquid to test the feasibility of some kind of airtight container.GP2Y0A21infrared distance sensor is Sharp Corporation’s production,is very commonly used in the sensor field.It uses the triangulation principle,has a strong adaptability and anti-interference,mainly used as an auxiliary sensor used in robotics,barrier car and so on.But as a ranging sensor,almost no one has studied it’s location characteristic.I will build the experiment platform,creating the experimental environment,with a large number of experiments show its location characteristics,application scope,combining graduation design to achieve the purpose. Re-introduction of microcontroller build GP2Y0A21infrared distance sensor-based ranging system, the output of the sensor model linearization,filtering and processing,culminating in a more precise distance measurement results displayed on the digital tube.Finally,its application to the liquid surface,and installation of glass between which has to verify its feasibility within the sealed container of liquid liquid level detection. Key Words:Infrared distance measurement;Triangulation;Linearization;Filter.
超声波传感器测距仪设计报告(全)-张哲铭
单片机、传感器、印制电路板 课程整合实训 电子产品设计与制作 技术报告 (2013——2014 学年第二学期) 项目名称:超声波测距仪设计 指导教师:卢建声,曾庆波,代瑶 专业:微电子技术 班级:12微电子 组长:张哲铭 组员:高金阁,李雨泽,苏程龙黑龙江信息技术职业学院·电子工程系
目录 任务书...................................................................... 错误!未定义书签。 一、工作任务 ................................................................. 错误!未定义书签。 二、工作目标 (3) 三、主要设计内容 (3) 1.原理设计 (3) 2.原理框图 (3) 3原理图 (4) 4元件清单 (4) 五、提交成果 ................................................................. 错误!未定义书签。 一、原理设计与技术路线 .............................................. 错误!未定义书签。 1、原理图绘制......................................................... 错误!未定义书签。 2、PCB图绘制.......................................................... 错误!未定义书签。 3、单元电路设计..................................................... 错误!未定义书签。 4、整机设计 ............................................................ 错误!未定义书签。 (5) (6) 六、总结报告 (10) 附录 (13) 超声波测距仪设计
红外测距传感器的工作原理及使用
光电检测技术与应用 论文 题目:红外测距传感器的工作原理及使用 院系:机电工程学院 班级:测控xxxx 完成日期:2017/5/6 小组:第x组 小组成员:xxxxxxxxxx 红外测距传感器的工作原理及使用 摘要: 利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 关键字:光电检测技术、智能车、测距、红外测距传感器、单片机 一、引言 光电检测作为光学与电子学相结合而产生的一门新兴检测技术,主要包括光信息获取、光电变换、光信息测量以及测量信息的智能化处理等,具有精度高、速度快、距离远、容量大、非接触、寿命长、易于自动化和智能化等优点,在国民经济各行业中得到了迅猛的发展和广泛的应用,如光扫描、光跟踪测量,光纤测量,激光测量,红外测量,图像测量,微光、弱光测量等,是当前最主要和最具有潜力的光电信息技术。
二、光电检测技术的概念 光电检测技术是光学与电子学相结合而产生的一门新兴检测技术。它主要利用电子技术对光学信号进行检测,并进一步传递、储存、控制、计算和显示。光电检测技术从原理上讲可以检测一切能够影响光量和光特性的非电量。它可通过光学系统把待检测的非电量信息变换成为便于接受的光学信息,然后用光电探测器件将光学信息量变换成电量,并进一步经过电路放大、处理,以达到电信号输出的目的。然后采用电子学、信息论、计算机及物理学等方法分析噪声产生的原因和规律,以便于进行相应的电路改进,更好地研究被噪声淹没的微弱有用信号的特点与相关性,从而了解非电量的状态。微弱信号检测的目的是从强噪声中提取有用信号,同时提高测系统输出信号的信噪比。 光电检测技术的系统机构比较简单,分为信号的处理器,受光器,光源。在实际检测过程中,受光器在获得感知信号后,就会被反映为不同形状、颜色的信号,同时根据这些器件所处在的不同位置,就能够将他分为反射型与透过型的两种比较的模式。光电检测的媒介光应当是自然的光,例如白炽灯或者萤光灯。特别是随着这些技术的发展,光电技术也取得的非常好发展。由于投光器在发出光后,会以不一样的方式触摸这些被检测物中,直到照射到检测系统中的受光器中,同时受光器在此刺激下,会产生一定量的电流,这就是我们常说的光敏性的原件,实际生活中应用比较广泛的有三极管、二极管。 三、光电检测技术的应用 智能车方面的应用、家庭扫地机器人方面的应用:利用光的反射性质,将光学系统与电路系统相结合可以制作避障传感器,通过单片机的控制,可以完成智能车在运行过程中,对障碍物的处理。避障传感器基本原理:利用物体的反射性质。在一定范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失。如果有障碍物,红外线遇到障碍物,被反射到达传感器接收头。传感器检测到这一信号,就可以确认正前方有障碍物,并送给单片机,单片机进行一系列的处理分析,协调车轮或者舵机工作,完成躲避障碍物的动作。 四、常用光电检测器件:红外测距传感器 原理:其输出为电压数值,通过公式L?=?(6762/(9-X))-4可计算出小车与障碍物之间的距离。
测距传感器分类特点
测距传感器编辑 本词条缺少信息栏、名片图,补充相关内容使词条更完整,还能快速升级,赶紧来编辑吧!超声波传感器是利用超声波的特性研制而成的传感器。超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生振动产生的,它具有频率高、波长短、绕射现象小,特别是方向性好、能够成为射线而定向传播等特点。 目录 1分类 2原理 3应用 1分类 编辑 超声波测距传感器 激光测距传感器 红外线测距传感器 24GHZ雷达传感器 2原理 编辑 超声波测距传感器原理: 超声波对液体、固体的穿透本领很大,尤其是在阳光不透明的固体中,它可穿透几十米的深度。超声波碰到杂质 24GHZ雷达传感器RFbeam 或分界面会产生显著反射形成反射成回波,碰到活动物体能产生多普勒效应。因此超声波检测广泛应用在工业、国防、生物医学等方面以超声波作为检测手段,必须产生超声波和接收超声波。完成这种功能的装置就是超声波传感器,习惯上称为超声换能器,或者超声探头。激光测距传感器工作原理: 激光传感器工作时,先由激光二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号。记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。激光传感器必须极其精确地测定传输时间,因为光速太快。 红外线测距传感器工作原理: 红外测距传感器利用红外信号遇到障碍物距离的不同反射的强度也不同的原理,进行障碍物远近的检测。红外测距传感器具有一对红外信号发射与接收二极管,发射管发射特定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到机器人主机,机器人即可利用红外的返回信号来识别周围环境的变化 24GHZ雷达测距传感器原理: FSK测运动物体[1] FMCW测静止和运动物体 [1]
基于STM32的电涡流测距传感器设计
2019年4月基于STM32的电涡流测距传感器设计 伍凯(安徽工程大学电气工程学院,安徽芜湖241000;合肥芯碁微电子装备有限公司,安徽合肥230000) 【摘要】电涡流式传感器是一款很经典的非接触式测量传感器。它具有灵敏度高,对使用环境抗干扰力强等优点,在很多行业都得到广泛的应用。本文介绍一种以STM32处理器为核心的电涡流传感器设计方案,可以将测量的数值直接显示出来,使得电涡流传感器更加数字化和智能化。 【关键词】电涡流传感器;STM32处理器;数字化;智能化 【中图分类号】TP212【文献标识码】A【文章编号】1006-4222(2019)04-0250-02 1引言 电涡流的物理现象由来已久,很早就已经有人对其进行研究。近代以来,随着电子技术的快速发展,对电涡流效应的应用也上了一大台阶,形成了一种新型的非接触式测量传感器,即电涡流式传感器,它能非接触、高性能的测量被测金属导体距探头表面的距离。近些年以来,电子技术的发展日新月异,各种各样的应用让人眼花缭乱,特别是出现了以微处理器为核心的结合了模数电路的一种新型的电涡流测量系统,使得传感器更加的数字化,方便了在实际中的使用。 本次设计的电涡流传感器包括信号发生模块,信号采集模块,STM32嵌入式处理器,人机交互模块等。用最小二乘算法拟合模数转换器输出的电信号与测量距离之间的函数关系,结合实验数据推导出多项式方程,并将该方程存储于STM32处理器中;软件部分通过KeiluVision4编程实现。 2电涡流测距传感器的工作原理 在给传感器测量系统通电后,传感器的前置器内会产生一个高频激励信号I1,该激励信号传递给探头的信号发射线圈后,会在探头的线圈附近产生一个交变磁场H1。在该线圈下方放置一个金属导体,根据法拉第电磁感应定律,产生的交变磁场H1会在该金属导体的表面产生一个感应电流I2,这种现象便称为电涡流现象,新产生的电涡流I2也会产生新的交变磁场H2,其方向与H1的方向相反。这种新产生的H2对交变磁场H1的反作用,会使得电涡流传感器线圈的高频电流的幅度和相位发生很大程度的改变。这种变化与金属导体的电导率σ、磁导率μ、激励电流频率f、线圈尺寸r、电流强度I以及线圈到金属导体的距离x有关。实际测量中,所有参数保持不变,每次只改变其中某一个参数,则可得到阻抗Z与该参数间的唯一对应函数关系,再使用对应公式计算出该参数,其表达式为:Z=F(μ,σ,x,r,I,f)。 3测距传感器函数关系的确立 3.1概述 主要是确立模数转换器输出的电信号与探头所测得的距离之间的函数关系的确立,通过理论推导与大量实验数据相结合拟合出所需的函数关系方程,再将确立的函数方程存储到单片机中。 3.2最小二乘法建模原理 最小二乘法是一种简便的数学算法。在数学中通过误差平方使误差达到最小值与寻找数学函数最佳的数据相匹配。我们可以通过最小二乘法的方法可以快速得到解得未知的数据与函数,并且使解得的数据结果与所求实际的数学函数数据结果两者之间的误差平方和达到函数最佳的值。 实际测量中,得到的一系列离散型数据(x1,y1),(x2, y2)......(x m,y m)建立这些离散数据的数学函数模型,确立离散数据的函数关系为y=f(x),其中y a为函数的输出值,x a为函数的被测值。从这些数据中可以找出n次多项式: P(x)=h0+h1x+h2x2+…+h n x n(n 红外测距电路总结报告 学院:机电工程学院 班级:11电气1班 学号:1100103139 姓名:刘丰源 摘要 本次实验是设计一个红外测距电路,它由软件和硬件两部分组成。软件部分包括信号产生、AD接收、数据处理、液晶显示;硬件部分包括发射模块和接收模块。此电路可以测较短的距离,精度在0~5mm之间。 关键词 STC8051单片机;红外测距; 一、方案设计 1、发射模块 采用用单片机产生一个1khz的信号经红外发射管发射这样设计既简单又方便,电路也更加简单。 2、接收模块 放大电路: 采用5v电源供电,利用lm358芯片进行单电源放大。由于放大倍数在20到40倍之间,经过一级放大即可。 滤波电路: 由于经过放大以后的信号还有很多杂波,而我们需要的是接收到的1khz的信号,一般的滤波器很难解决干扰问题,所以直接选用有源二阶带通滤波器。 峰值检波电路: 根据要求的精度为5mm,最简单的峰值检波电路即可胜任,出于节约成本的考虑,决定不用带运放的高精度检波电路,假如还要进一步提升测量精度,就需要选用更好的峰值检波电路。 AD转换电路: AD转换选用0809芯片,它是并行传输的,占用的IO口太多,但是软件编写非常简单。 单片机控制电路: AD转换的数字信号传入单片机,通过软件自动求出所测的距离,显示正确的距离。 二、电路分析 1.发射模块 由8051的定时器产生一个1khz的方波,用一个三极管驱动,将信号加载到 红外发射管上。 2.接收模块电路设计 因为红外接收管接收到的信号只有一百毫伏左右,而且还有很多干扰,需要先放大再带通滤波,单片机只能接受数字信号,所以还需要通过峰值检波输出一个直流电压,经TLC1543芯片转换成数字信号输入单片机进行处理。 考虑到题目测量范围和接收到的信号大小,选取放大倍数为40倍左右,倍数太大回出现波形失真,使测量的最短距离变小,倍数太小信号强度不够,则能测量的最远距离会变小, 放大倍数B=R4/R3=40; 关于有源二阶带通滤波器的设计: 令C=C3=C4,则req=R5//R6=(R5*R6)/(R5+R6) 品质因数Q等于中心频率除以带宽 即Q=fc/BW=1/2*req R /7 由上边的公式,取中心频率f=1khz,增益A=2,品质因数Q=10, 则令C=C3=C4=50nf,可以得到电阻值为R5=16K,R6=160,R7=64K; 关于峰值检波电路的设计: 考虑到电容值越大检波效果越好,但是放电速度越慢,经过测试,选取了20uf的电容和100k的电阻以及1n4148构成最简单的峰值检波电路。 电路图及元件参数如下: 3.单片机控制模块 接收模块处理好的数据传入单片机,程序自动计算出此时的距离,再在1602液晶上显示。 测距传感器主流之激光测距传感器工作原理 激光传感器工作时,先由激光二极管对准目标发射激光脉冲.经目标反射后激光向各方向散射.部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上.雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号.记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离.激光传感器必须极其精确地测定传输时间,因为光速太快. 激光测距传感器与超声波测距传感器之性能对比 激光测距传感器原理及应用 一、激光距离传感器的发展 激光在检测领域中的应用十分广泛,技术含量十分丰富,对社会生产和生活的影响也十分明显.激光测距是激光最早的应用之一.这是由于激光具有方向性强、亮度高、单色性好等许多优点.1965年前苏联利用激光测地球和月球之间距离(384401km)误差只有250m.1969年美国人登月后置反射镜于月面,也用激光测量地月之距,误差只有15cm. 利用激光传输时间来测量距离的基本原理是通过测量激光往返目标所需时间来确定目标距离.即: . 激光测距虽然原理简单、结构简单,但以前主要用于军事和科学研究方面,在工业自动化方面却很少见.因为激光测距传感器售价太高,一般在几千美元.实际上,所有工业用户都在寻找一种能在较远距离实现精密距离检测的传感器.因为许多情况下近距离安装传感器会受物理位置及生产环境的限制,如今的激光测距传感器将为这类场合的工程师排忧解难. 二、工作原理 激光传感器工作时,先由激光二极管对准目标发射激光脉冲.经目标反射后激光向各方向散射.部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上.雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号.记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离.激光传感器必须极其精确地测定传输时间,因为光速太快. 例如,光速约为3108m/s,要想使分辨率达到1mm,则测距传感器的电子电路必须能分辨出以下极短的时间: 0.001m(3108m/s)=3ps 要分辨出3ps的时间,这是对电子技术提出的过高要求,实现起来造价太高.但是如今廉价的激光传感器巧妙地避开了这一障碍,利用一种简单的统计学原理,即平均法则实现了1mm的分辨率,并且能保证响应速度. 三、解决其它技术无法解决的问题 激光距离传感器可用于其它技术无法应用的场合.例如,当目标很近时,计算来自目标反射光的普通光电传感器也能完成大量的精密位置检测任务.但是,当目标距离较远内或目标颜色变化时,普通光电传感器就难以应付了. 虽然先进的背景噪声抑制传感器和三角测量传感器在目标颜色变化的情况下能较好地工作,但是,在目标角度不固定或目标太亮时,其性能的可预测性变差.此外,三角测量传感器一般量程只限于0.5m以内. 三角法红外测距原理介绍 工作原理: Sharp的红外传感器都是基于一个原理,三角测量原理。红外发射器按照一定的角度发射红外光束,当遇到物体以后,光束会反射回来,如图1所示。反射回来的红外光线被CCD检测器检测到以后,会获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D就可以通过几何关系计算出来了。 图1:三角测量原理 可以看到,当D的距离足够近的时候,L值会相当大,超过CCD的探测范围,这时,虽然物体很近,但是传感器反而看不到了。当物体距离D很大时,L值就会很小。这时CCD检测器能否分辨得出这个很小的L 值成为关键,也就是说CCD的分辨率决定能不能获得足够精确的L值。要检测越是远的物体,CCD的分辨率要求就越高。 非线性输出: Sharp GS2XX系列的传感器的输出是非线性的。没个型号的输出曲线都不同。所以,在实际使用前,最好能对所使用的传感器进行一下校正。对每个型号的传感器创建一张曲线图,以便在实际使用中获得真实有效的测量数据。下图是典型的Sharp GP2D12的输出曲线图。 图2:Sharp GP2D12输出曲线 从上图中,可以看到,当被探测物体的距离小于10cm的时候,输出电压急剧下降,也就是说从电压读数来看,物体的距离应该是越来越远了。但是实际上并不是这样的,想象一下,你的机器人本来正在慢慢的靠近障碍物,突然发现障碍物消失了,一般来说,你的控制程序会让你的机器人以全速移动,结果就是,"砰"的一声。当然了,解决这个方法也不是没有,这里有个小技巧。只需要改变一下传感器的安装位置,使它到机器人的外围的距离大于最小探测距离就可以了。如图3所示: 红外测距系统的基本结构 该系统主要由红外发射电路、红外接收电路、A/D转换电路,AT89C52芯片、键盘接口电路及LCD显示电路等组成。其组成框图如图所示 红外测距系统工作流程 在整个红外测距系统工作中,当系统被接入启动电源后,首先,对STM32单片机进行初始化,当单片机接收到红外传感器 GP2Y0A21传输的模拟电压信号后,经过A/D转换电路,将输入单片机的模拟电压信号Vout转换为单片机可识别的数字信号,并经过电压距离转换程序,转换出要测量的距离,然后通过10次均值滤波来提高测量的精确度,最后在通过液晶显示屏LCD显示出测量结果。 为了实现红外测距,在硬件设计中,我们可以使红外发射驱动电路驱动发射头的红外二极管发出红外光,当红外光由红外接收驱动电路驱动红外接收头的光敏二极管接收到,并通过电压转换,将其转换为可测量的电压值,因为红外光的强度会随距离的缩小而增强,红外接收电路转化的电压值会随之增强。又因为电压与距离成比例,通过对转换的电压的计算,我们可以知道红外发射模块与接收模块的距离。我们采用LCD 显示屏动态显示变化中的距离, LCD显示器与AT89C52芯片的P0口与P2.0-2.2接口相接,在红外接收模块运动过程,AT89C52芯片内部会将电压模拟量通过A/D转换将其转化为可显示的数字量,然后通过LCD显示器显示出。通过键盘接口可以实现距离的测量与面积的计算。 系统硬件结构电路图 红外测距的硬件设计红外收发模块 红外发送管是用于发送信号,经过障碍物将信号反射,红外接收管接收到反射回来的信号,然后根据信号强弱将对应的电压值显示在显示模块上,并将此时的距离记录下来。然后整改程序,用红外收发模块进行测距,就可在显示模块上显示出红外接收管接收的 信号强度对应的距离值。 如图所示GP2Y0A02YK0F有3个端口,其中VCC接信号输入,VO接MCP3001的IN+,GND接地线。GP2Y0A02YK0F测量范围在20cm-150cm之间,测量误差小于0.5cm。是一个距离测量传感器单元,PSD的集成组合构成(位置敏感探测器),IRED(红外发光二极管)和信号原理电路。由于采用三角测量方法,各种物体的反射率,对环境 温度和工作时间距离检测不容易产生影响。 复位系统 单片机复位系统就是让程序计数器回到0000h这个地址,程序重头开始执行,将一些 寄存器、存储单元都置为初始设定值,单片机复位的形式有很多种,比如上电复位、 看门狗复位、手动复位等等。本开发板运用的是外接电路来手动复位,如图8所示,STM32单片机采用低电平复位,使复位开关RESET按下单片机接入低电平即完成复位操作。 A/D转换模块 A/D 转换器按照转换的原理可分为直接A/D 转换器和间接A/D 转换器两种类型。直接A/D 转换器,就是把模拟信号直接转换成数字信号,比如逐次逼近型。间接A/D 转换 超声波测距传感器SDM-IO 本模块最远测试距离是1500mm,测量周期10ms专为小车设计。1、本模块性能稳定,测度距离精确。能和国外的SRF05,SRF02等超声波测距模块相媲美。模块高精度,首创无盲区(0cm开始测量),稳定的测距是此产品成功走向市场的有力保障。 2 主要技术参数: 1)使用电压:DC3.8-5.5V 2)静态电流:小于8mA 3)输出TTL电平 4)感应角度:不大于15度 5)探测距离:0cm-1500mm 6)高精度:可达3mm 接线方式,VCC、trig(控制端)、echo(接收端)、GND 模块主要特点: (1)超微型,只相当于两个发射,接收头的面积,已经没法再小了. (2)无盲区(8mm内成三角形误差稍大). (3)反应速度快,10ms的测量周期,不容易丢失高速目标。 (4)发射头,接收头紧靠,和被测目标基本成直线关系(8mm内还是大三角形,这个是发射,接收头的物理形状决定了). (5)模块上有LED指示,方便观察和测试! 1:超声波测距原理 超声波是一种频率比较高的声音,指向性强.超声波测距的原理是利用超声波在 空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。由此可见,超声波测距原理与雷达原理是一样的。 测距的公式表示为:L=C×T 式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半)。 已知超声波速度C=344m/s (20℃室温) 超声波传播速度误差 超声波的传播速度受空气的密度所影响,空气的密度越高则超声波的传播速度就越快,而空气的密度又与温度有着密切的关系,近似公式为:C=C0+0.607×T℃ 式中:C0为零度时的声波速度332m/s; T为实际温度(℃)。 对于超声波测距精度要求达到1mm时,就必须把超声波传播的环境温度考虑进去。 2:超声波模块使用方法 使TRIG=0,最少延迟10us的时间,然后TRIG=1,超声波模块此时开始启动一个测量周期,发射若干个40khz的声波,然后启动10ms的定时器等待反射波,如果收到反射波,模块的ECHO输出一个宽度为150us的负脉冲,从TRIG=1到ECHO=0的时间即为从发射到收到发射波的时间. 3:为什么距离最远只有1500mm? 本传感器专为智能小车等微型设备而设计,适合小范围,小空间,封闭空间的场合,大家知道,超声波传输速度低,衰减时间长,如果一味追求距离,就会导致响应时 间长,丢失目标,在室内等封闭场合会形成多次发射震荡,传感器就无法正常工作了. 下面从传感器的反应时间来分析距离的问题: 超声波空气中速度每秒约340米,折算成毫秒,就是340mm/ms,探测距离为1500mm 的话,探测到回波的距离就是3000mm,超声波的传输时间是9ms,加上电路延迟, 传感器的能量延迟,再预留一些保护时间(让上次超声波能量消失),每次测量时 间就是10ms.10ms的反应速度对于智能小车来说是合适的,高速运动时不会丢失目标. 现在市面有一种传感器是5米,这个5米是最大距离,探测目标一般是墙面等大发射面,对于小目标是不可能达到的,先不管这个小目标到底是多少距离了,我们从红外测距总结报告
测距传感器主流之激光测距传感器工作原理
三角法红外测距原理介绍
红外测距
超声波测距传感器疑问