T8 LED微波感应模块参数
LampL-WR
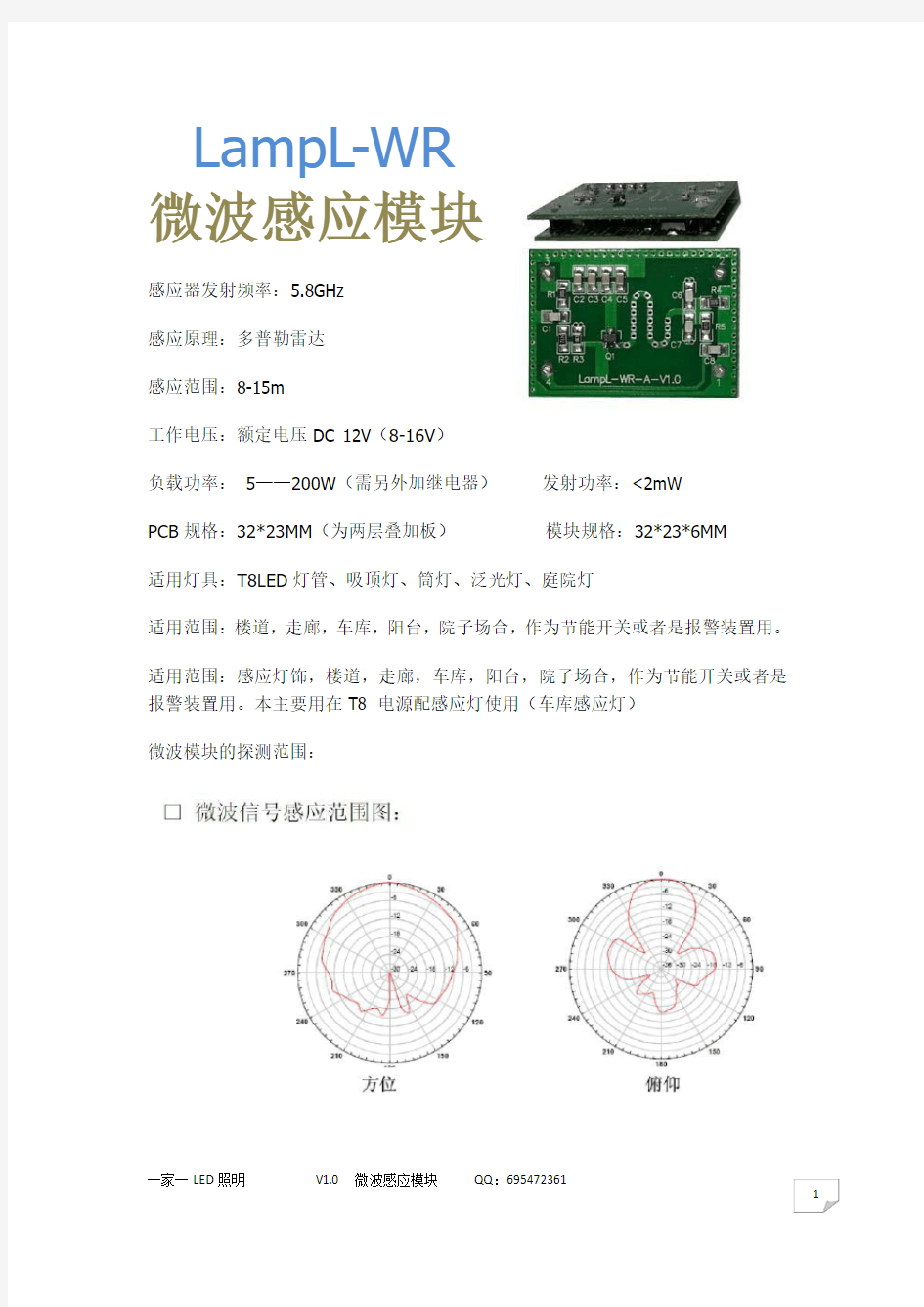
微波感应模块 感应器发射频率:5.8GHz
感应原理:多普勒雷达
感应范围:8-15m
工作电压:额定电压DC 12V (8-16V )
负载功率: 5——200W (需另外加继电器) 发射功率:<2mW
PCB 规格:32*23MM (为两层叠加板) 模块规格:32*23*6MM 适用灯具:T8LED 灯管、吸顶灯、筒灯、泛光灯、庭院灯
适用范围:楼道,走廊,车库,阳台,院子场合,作为节能开关或者是报警装置用。 适用范围:感应灯饰,楼道,走廊,车库,阳台,院子场合,作为节能开关或者是报警装置用。本主要用在T8 电源配感应灯使用(车库感应灯)
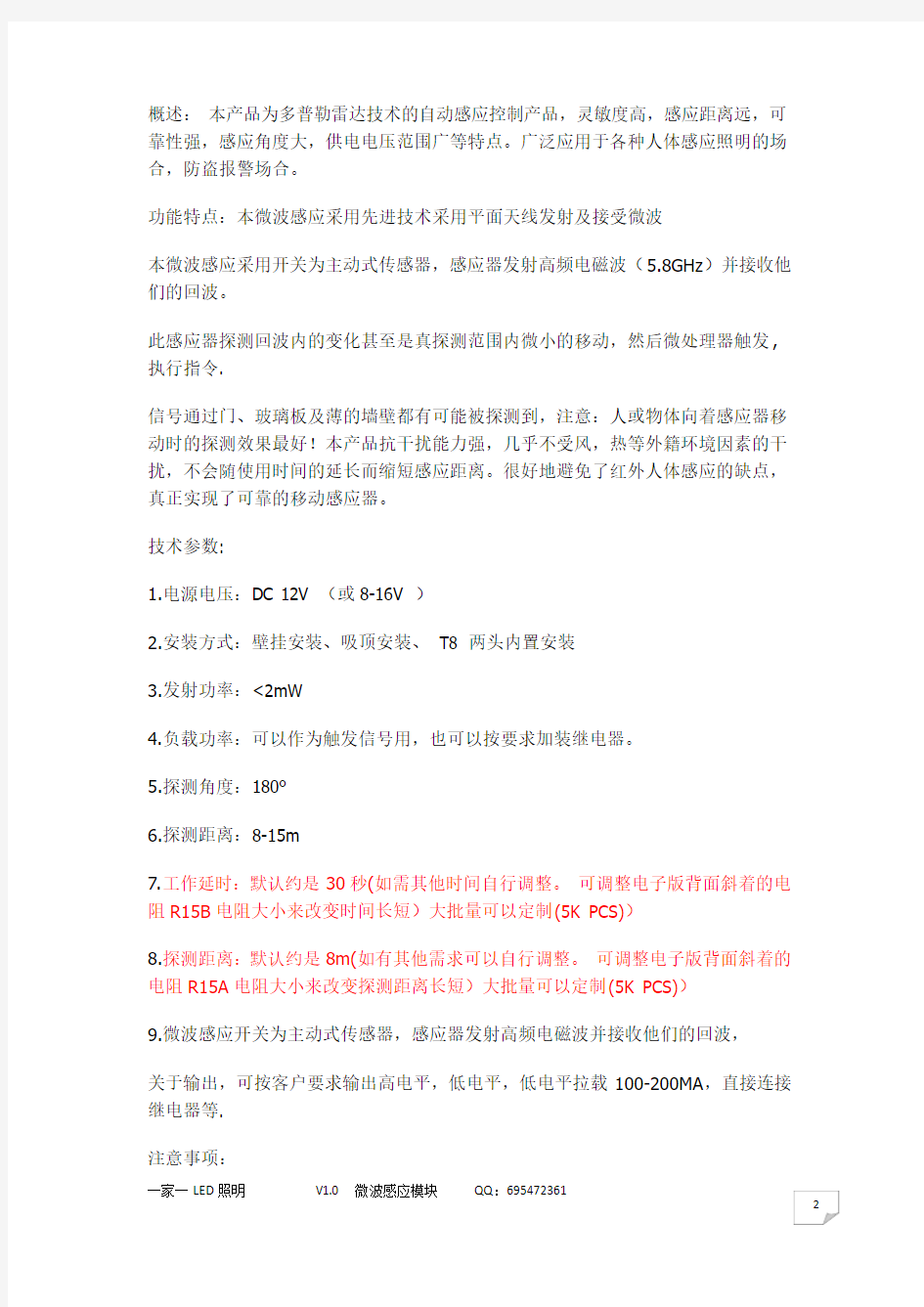
微波模块的探测范围:
概述:本产品为多普勒雷达技术的自动感应控制产品,灵敏度高,感应距离远,可靠性强,感应角度大,供电电压范围广等特点。广泛应用于各种人体感应照明的场合,防盗报警场合。
功能特点:本微波感应采用先进技术采用平面天线发射及接受微波
本微波感应采用开关为主动式传感器,感应器发射高频电磁波(5.8GHz)并接收他们的回波。
此感应器探测回波内的变化甚至是真探测范围内微小的移动,然后微处理器触发,执行指令.
信号通过门、玻璃板及薄的墙壁都有可能被探测到,注意:人或物体向着感应器移动时的探测效果最好!本产品抗干扰能力强,几乎不受风,热等外籍环境因素的干扰,不会随使用时间的延长而缩短感应距离。很好地避免了红外人体感应的缺点,真正实现了可靠的移动感应器。
技术参数:
1.电源电压:DC 12V (或8-16V )
2.安装方式:壁挂安装、吸顶安装、T8 两头内置安装
3.发射功率:<2mW
4.负载功率:可以作为触发信号用,也可以按要求加装继电器。
5.探测角度:180°
6.探测距离:8-15m
7.工作延时:默认约是30秒(如需其他时间自行调整。可调整电子版背面斜着的电阻R15B电阻大小来改变时间长短)大批量可以定制(5K PCS))
8.探测距离:默认约是8m(如有其他需求可以自行调整。可调整电子版背面斜着的电阻R15A电阻大小来改变探测距离长短)大批量可以定制(5K PCS))
9.微波感应开关为主动式传感器,感应器发射高频电磁波并接收他们的回波,
关于输出,可按客户要求输出高电平,低电平,低电平拉载100-200MA,直接连接继电器等.
注意事项:
1、严禁带电作业,以免动作失误,接错,烧坏电路或触电;
2、避免安装在热晒雨淋地方,防止损坏或影响使用寿命.
3:最好安装远离磁场的地方以免有误动作
4:最好安装远离有导体移动(像风扇什么的)的地方以免有误动作
5:供电电压是7-15V 超过可能造成永久性损坏电压过低可能造成感应误动作或不动作
6:供电输出接线不要接错以免造成坏掉
7:供电必须使用干净的电源尤其是低频纹波容易受干扰如使用开关电源出现不正常时用示波器测量一般在供电处加个47uf电容就能解决
8:感应面是蛇形线处此面感应距离最远,不要反转使用。
微波感应模块示图:
感应模块接线示意图:
T8 感应模块装配图片:
四:微波比其他产品的优势
严防干扰,性能超稳定,不受环境温度影响.
体积小巧,安装简单可靠.
感应距离远,亦可定制(可达15米).
反应快速,灵敏度高.
探测角度180X 360
雷达波能穿透非金属物体,诸如木板,玻璃,塑胶,纤维织物等;水泥墙和金属板则可阻截.
G雷达微波感应模块
Typical Application Circuit (LED 感应等) Feature ? 供电电压 5.5V to 15V ? 微波发射及接收频率:5.8G ? 感应距离可调,最高到10米 ? 360度全向检测 ? 延时时间可调,默认38秒 ? 封锁时间:2秒 ? 连续触发工作模式 ? 无相互干扰 Applications ? 感应灯 ? 自动门 ? 自动录像系统 Description AM5805微波感应模块是利用多普勒雷达(Doppler Radar)原理设计的微波移动物体 探测器,微波频率 5.8GHz+-75MHz ,直接输入直流电压即可工作,同时输出逻辑高低电平。 本模块包含两个部分:感应模块和处理模块。感应模块检测物体的移动,产生微弱的IF 信号;处理模块接收到IF 信号后,进行滤波放大处理后,输出逻辑电平。 AM5805主要应用于 LED 节能照明、自动 门控制开关、工业自动化控制,室内外安全防范系统、ATM 自动提款机的自动录像控制系统、 野外安全警世等场所。 AM5805微波感应模块属于非接触探测型模块,抗射频干 扰能力强,不受温度,湿 度,光线,气流,尘埃影响,可以安装在一定厚度的塑料,玻璃,木制等非金属的外壳里面, 方便应用到各种产品或设备控制上面 AC220V
感应模块 处理模块 Electrical Characteristics (@T A = +25°C, unless otherwise specified.) Outline Dimension 感应模块外观尺寸图 (mm ) 18 25 2012 1 2.5
微波(雷达)感应模块原理调试 (2)
雷达感应开关原理调试 一、原理简介: 1. 主要功能与原理:如上图所示,上图是雷达感应开关模块的感应板的电路原理图,由集电极外PCB两层铜箔间的电容、三极管内阻、寄生电容等构成RC震荡电路,该震荡电路震荡产生高频信号,经过三极管放大,再经过围绕PCB三边的天线发射出去。发射的 2.4- 3.2GHz的微波信号如果遇到移动物体,则反射波相对发射波就会有相位变化,回型天线接收到反射信号,反射波与发射信号的相位移频就会以3-20MHz左右的低频输出(P4),该信号再由后级运放放大,驱动继电器,从而由继电器控制灯光。另外,中间也可以加上光敏二极管检测昼夜光线,作为夜间条件下控制输出的前提条件。 2. 发射频率:RC振荡电路的频率f=1/2πRC,公式中的R是原理图中三极管的输入阻抗,C是PCB 上三极管集电极基极引线正反面铜箔之间的电容以及三极管寄生电容组成的总电容。该电容量公式为C=εS/d,式中ε为介质(在这里就是指的PCB板材的介电常数),S为PCB极板面积,d为极板间距也就是PCB厚度。 3. 接收:通过回型天线接收反射回来的雷达波,如果发射与接收波之间有相位移频,则输出低频信号P4。 4. 发射避开公共频段又不能过高:因为3G和4G手机信号和WIFI信号的频率范围在1.8-2.4GHz,模块的工作频率尽可能避开这个频段,避免相互干扰。一般的发射频率2.5GHz左右最佳,频率过
高,则高频三极管增益降低,感应距离近。发射频率同天线部分PCB线路板尺寸大小、厚度、布线、三极管输入阻抗与电容等有关。 5. 发射频率与发射信号强度:如果有频谱仪测试发射天线端的发射信号,可以测试到发射频点及 其发射信号幅度。发射信号强度越大,感应距离越远。但是,高频三极管来说,随着频率的增加,其增益逐渐降低,发射的信号强度也就降低。另外,同一个频率,三极管的特征频率fT越大,其 高频增益就越高,感应距离也就越远,所以,最好设计调整PCB,将频点做到2.4GHz。 6. 接收灵敏度:同样频率,高频三极管对高频信号的fT越大,高频增益越高,接收的移频信号输 出幅度越大,感应灵敏度就越高,感应距离就越远。适当调整后级运放的放大倍数也可以调整感 应距离,但是,如果单纯的提高后级运放的倍数,虽然感应较远距离,但会将小幅度的其它干扰 信号也放大输出,造成误报。 影响感应距离的几个因素:A .发射天线板的尺寸,该尺寸越大,天线越长,则感应距离越远。B . 高频三极管的特征频率越高,其高频增益越大,感应距离也就越远。C.后级运放的放大倍数适当 的高,其对输出的移频信号放大的幅度大。D.发射频率最好在标准规范的2.4GHz。高频三极管的 增益会随着频率的增大而降低降低,频点太高,发射信号功率降低、接收灵敏度也降低。 如果调试得当,使用9GHz的高频三极管的,天线板尺寸在20*30mm左右时,感应距离会在3-5米。天线尺寸在30*40mm左右,感应距离会到8-10米。天线尺寸到40*50mm最远感应距离会 达到20米左右。如果你想在此基础上降低感应距离,可以调整降低后面放大板上的运算放大器的增益,或者改变输入的驱动电平,来满足不同感应距离的要求。 7. 发射天线:围绕天线板3边,用于将本振频率信号发射出去,天线板尺寸越大,该天线越长, 则发射信号越强,发射距离越远,感应距离也就越远,但是,这个发射天线又不能形成四边闭环。天线对电源之间的4个电容主要是对与发射频率相同、从电源串扰进来的其它模块的信号与WIFI 信号屏蔽滤波,如果出现串扰,请调整电容容量或者数量,使得滤波频点同本板发射频率相同。 8. 感应信号放大灯光控制:原理图中,通过P4输出感应信号SING OUT到后面的放大电路,将该 信号通过运放放大,再去控制光源。为了避免被干扰误报,建议在后级放大电路中采用带有运放 功能的CPU,植入信号判断程序,从而将其它非感应信号滤除并加入不同状态的灯光控制,提高 抗干扰能力。 9. 回型天线:发射极外的回型天线接收反射信号,为了使反射信号有效穿过回型天线,回型天线 后面不敷设覆铜板。另外,回型天线只需要一个正弦波形就可以。还可以通过适当加宽回型天线 线宽、加大波形幅度,并且在线上密布过孔来提高感应信号强度和灵敏度(注意:PCB三边和回 型天线上的过孔一定要满镀锡或者镀化学金,以加强发射接收信号的强度)。 10. 基极外去耦合铜箔天线:基极B外那个长方形天线(基极与R3之间的矩形铜箔天线)用作与 其背面的PCB覆铜板形成的电容退耦合。该去耦尺寸太小,则退耦没做好,感应距离很差并不稳定,如果尺寸过大,又会持续输出感应信号,一般24*33mm的天线板的去耦合天线尺寸在 3*8mm,如果天线尺寸大于或者小于24*33mm,则该去耦天线同比例增加或者缩小面积。这个去
传感器性能指标
一、测量仪表的基本性能 1、精确度 (1)精密度δ 它表明仪表指示值的分散性,即对某一稳定的被测量,由同一个测量者,用同一个仪表,在相当短的时间内,连续重复测量多次,其测量结果(指示值)的分散程度。δ愈小,说明测量愈精密。 例如,某温度仪表的精密度δ=0.5℃,即表示多次测量结果的分散程度不大于0.5℃。精密度是随机误差大小的标志,精密度高,意味着随机误差小。 但是必须注意,精密度与准确度是两个概念,精密度高不一定准确。 (2)准确度ε 它表明仪表指示值与真值的偏离程度。 例如,某流量表的准确度ε=0.3m3/s,表示该仪表的指示值与真值偏离0.3m3/s。准确度是系统误差大小的标志,准确度高,意味着系统误差小。同样,准确度高不一定精密。(3)精确度τ 它是精密度与准确度的综合反映,精确度高,表示精密度和准确度都比较高。在最简单的情况下,可取两者的代数和,即τ=δ+ε。精确度常以测量误差的相对值表示。 2、稳定性 (1)稳定度 指在规定时间内,测量条件不变的情况下,由于仪表自身随机性变动、周期性变动、漂移等引起指示值的变化。一般以仪表精密度数值和时间长短一起表示。 例如,某仪表电压指示值每小时变化1.3V,则稳定性可表示为1.3mV/h。 (2)影响量 测量仪表由外界环境变化引起指示值变化的量,称为影响量。它是由温度、湿度、气压、振动、电源电压及电源频率等一些外界环境影响所引起的。说明影响量时,必须将影响因素与指示值偏差同时表示。 例如,某仪表由于电源电压发生变化10%而引起其指示值变化0.02mA,则应写成 0.02mA/U±10%。 二、传感器的分类和性能指标 1、传感器的分类
人体红外感应模块 BISS0001
人体红外感应模块电路主要由人体红外传感器、菲涅尔透镜、专用芯片BISS0001组成。当有人出现在它的探测区,传感器便能探测到信号并把信号传给单片机,单片机再根据实际情况是否该开启器件设备或让房间的电器设备处于一种可开启状态。另外,关于走廊及洗手问用灯情况,当晚上有人经过时,人体红外感应到人便开启走廊用灯或者洗手间用灯。热释人体红外模块电路如图2所示。 图2 热释人体红外电路图 上图中,R3为光敏电阻,用来检测环境照度。当作为照明控制时,若环境较明亮,R3的电阻值会降低,使9脚的输入保持为低电平,从而封锁触发信号Vs。SW1是工作方式选择开关,当SW1与1端连通时,芯片处于可重复触发工作方式;当SW1与2端连通时,芯片则处于不可重复触发工作方式。图中R6可以调节放大器增益的大小,原厂图纸选10K,实际使用时可以用3K,可以提高电路增益改善电路性能。输出延迟时间Tx由外部的R9和C7的大小调整,触发封锁时间Ti由外部的R10和C6的大小调整,R9/R10可以用470欧姆,C6/C7可以选0.1U。 3.1.1 BISS0001芯片介绍(小四号黑体) BISS0001是一款传感信号处理集成电路。静态电流极小,配以热释电红外传感器和少量外围元器件即可构成被动式的热释电红外传感器。广泛用于安防、自控等领域能。 特点:CMOS工艺 数模混合 具有独立的高输入阻抗运算放大器
内部的双向鉴幅器可有效抑制干扰 内设延迟时间定时器和封锁时间定时器 采用16脚DIP封装 3.1.1.1管脚图 表3-1 管脚说明引脚名称I/O功能说明 1 A I 可重复触发和不可重复触发选择端。当A为“1”时,允许重复触发;反之,不可重复触发 2 VO O 控制信号输出端。由VS的上跳前沿触发,使V o输出从低电平跳变到高电平时视为有效触发。在输出延迟时间Tx之外和无VS的上跳变时,V o保持低电平状态。 3 RR1 -- 输出延迟时间Tx的调节端 4 RC1 -- 输出延迟时间Tx的调节端 5 RC2 -- 触发封锁时间Ti的调节端 6 RR2 -- 触发封锁时间Ti的调节端 7 VSS -- 工作电源负端 8 VRF I 参考电压及复位输入端。通常接VDD,当接“0”时可使定时器复位 9 VC I 触发禁止端。当VcVR时允许触发(VR≈0.2VDD) 10 IB -- 运算放大器偏置电流设置端 11 VDD -- 工作电源正端 12 2OUT O 第二级运算放大器的输出端 13 2IN- I 第二级运算放大器的反相输入端 14 1IN+ I 第一级运算放大器的同相输入端 15 1IN- I 第一级运算放大器的反相输入端 16 1OUT O 第一级运算放大器的输出端 工作原理
新型的数字温湿度传感器性能参数.
新型的数字温湿度传感器性能参数 LM-400、LM-410、LM-420是一种新型的温度或温湿度采集模块,利用它可以实现现场温度值、相对湿度值的采集,同时利用其自身的RS-485总线串行通信接口可以方便地和机房监控主机或其他工控主机进行联网。 工作于-40℃~85℃工业级温湿度采集模块,按显示方式分,有不带LCD显示屏(LM-400)和带LCD显示屏(LM-410、LM-420)两类,按报警方式分有不带独立报警(LM-400、LM-410)和带独立报警(LM-420)两类。采集温度范围为-40℃~+85℃,精度0.1℃;相对湿度范围0~100%,精度0.5% 。 LM-400、LM-410、LM-420温湿度采集模块可通过隔离的485通讯接口与RS-485局域控制网组网连接,RS-485最多允许32个温湿度采集模块挂在同一总线上,但如采用Link-Max的RS-485中继器,则可将多达256个温湿度采集模块连到同一网络,且最大通信距离为1200m。在将温湿度采集模块安装入网前,应对其进行配置,并首先应将模块的波特率与网络的波特率设为一致,同时应分别设置温湿度采集模块为不同的地址,防止各温湿度采集模块的地址冲突。 将温湿度采集模块正确连接后,主机发出读数据命令即可使温湿度采集模块将数据送回主机。温湿度采集模块内的数据每秒钟更新一次,并周期性地更新LCD显示屏的显示数据。
LM-400用于不需要显示的场合,如户外ATM机柜,LM-410用于不需要现场独立报警的场合,如有主机控制的安防工程;LM-420是功能最多的型号,除可完成温度采集、湿度采集外,还可以预先设置温度、湿度的上下限报警值,当环境参数超过该设定值时,机内蜂鸣器立即响起报警声,同时LM-420机内的继电器吸合,可以用来控制一个声光报警器(警号),不用主机也可实现自主报警,让现场管理人员第一时间地作出应对措施。 LM-400、LM-410、LM-420智能温湿度采集模块是一种具有广泛应用前景的全数字化温湿度采集模块,使用该模块可使计算机房的环境监控变得十分容易,监控主机可方便地进行机房的各重要区块(如刀片服务器机柜、路由器机柜、网络交换机机柜、UPS配电柜)的温湿度数据采集,同时简化了整个机房监控系统,而机房监控系统的可靠性也得到了提高。因此,该模块在机房监控系统、电力系统和工业自动化等领域获得广泛的应用,具有极优的性价比。 LM-400、LM-410、LM-420还可和LM-8052NET配合,组成TCP/IP的温度采集网络,可实现远程采集温度与湿度。 性能参数 输入响应时间(模块内数据更新率)为1秒同步测量 1路隔离的485, MODBUS RTU通讯协议 采用RS-485二线制输出接口时,具有+15kV的ESD保护功能
hawk导波雷达物位计产品说明书[2]
导波雷达物位计 使用手册 重庆霍克川仪仪表有限公司
目录 测量原理 (3) 产品介绍 (4) 安装指南 (5) 仪表调试 (10) 接线方式 (21) 技术参数 (21) 产品选型 (22)
MPS2000系列导波雷达物位计 测量原理 导波雷达是基于TDR(时间行程)原理的测量仪表。 探头发出高频脉冲并沿缆绳传播,当脉冲遇到物料表面 时反射回来被仪表内接收器接收。通过独特的等效采样 技术,将记录脉冲发射到接收之间的时间差,最终转化 为仪表到料位之间的距离。并将距离信号转化为物位信 号。 输入 反射的脉冲信号沿缆绳传导至仪表电子线路部分,微处理器对此信号进行处理,识别出 微波脉冲在物料表面所产生的回波。正确的回波信号识别由智能软件完成,距离物料表面的距离D与脉冲的时间行程T成正比: D=C×T/2 其中C为光速 因空罐的距离E已知,则物位L为: L=E-D 输出 通过输入空罐高度(零点),满罐高度(满量程)及一些现场工况和应用参数来来使得仪表自动使用现场的测量环境,对应料位的比例输出4~20mA电流信号以及HART仪表总线上的数据。
产品介绍
安装指南 下述的安装指南适用于缆式和杆式探头测量固体颗粒料和 液体物体。同轴管式探头只适用于液体物体。 安装位置: 尽量远离出料口和进料口。 对金属罐和塑料罐,在整个量程范围内不碰壁。如果是金属罐, 物位仪表不要安装在罐的中央。 建议安装在料仓直径的1/4处。 缆式探头或杆式探头离罐壁最小距离不小于30厘米。 探头底部距罐底大约30mm。 探头距罐内障碍物最小距离不小于200mm。 如果容器底部是锥型的,传感器可以安装 罐顶中央,这样可以一直测量到罐底。 测量范围 说明: H----测量范围 L----空罐距离 B----顶部盲区 E----探头到罐壁的最小距离 顶部盲区是指物料最高料面与测量参考点之间的最小距离。 底部盲区是指缆绳最底部附近无法精确测量的一段距离。 顶部盲区和底部盲区之间是有效测量距离。 注意: 只有物料处于顶部盲区和底部盲区之间时,才能保证罐内物位的可靠测量。
传感器的主要参数特性
传感器的主要参数特性 传感器的种类繁多,测量参数、用途各异.共性能参数也各不相同。一般产品给出的性能参数主要是静态特性利动态特性。所谓静态特性,是指被测量不随时间变化或变化缓慢情况下,传感器输出值与输入值之间的犬系.一般用数学表达式、特性曲线或表格来表示。动态特性足反映传感器随时间变化的响应特性。红外碳硫仪动恋特性好的传感器,其输出量随时间变化的曲线与被测量随时间变化的曲线相近。一般产品只给出响应时间。 传感器的主要特性参数有: (1)测量范围(量程) 量程是指在正常工种:条件下传感器能够测星的被测量的总范同,通常为上限值与F 限位之差。如某温度传感器的测员范围为零下50度到+300度之间。则该传感器的量程为350摄氏度。 (2)灵敏度 传感器的灵敏度是指佑感器在稳态时输出量的变化量与输入量的变化量的比值。通常/d久表示。对于线性传感器,传感器的校准且线的斜率就是只敏度,是一个常量。而非线性传感器的灵敏度则随输入星的不同而变化,在实际应用巾.非线性传感器的灵敏度都是指输入量在一定范围内的近似值。传感器的足敏度越高.俏号处理就越简单。 (3)线性度(非线性误差) 在稳态条件下,传感器的实际输入、输出持件曲线勺理想直线之日的不吻合程度,称为线性度或非线性误差,通常用实际特性曲线与邵想直线之司的最大偏关凸h m2与满量程输出仪2M之比的百分数来表示。该系统的线性度X为 (4)不重复性 z;重复性是指在相同条件下。传感器的输人员技同——方向作全量程多次重复测量,输出曲线的不一致程度。通常用红外碳硫仪3次测量输11j的线之间的最大偏差丛m x与满量程输出值ym之比的百分数表示,1、2、3分别表示3次所得到的输出曲线.它是传感器总误差中的——项。 (5)滞后(迟滞误差) 迟滞现象是传感器正向特性曲线(输入量增大)和反向特性曲线(输入量减小)的不重合程度,通常用yH表示。
人体红外感应开关电路原理
红外热释电处理芯片BISS0001 BISS0001是一款具有较高性能的传感信号处理集成电路,它配以热释电红外传感器和少量外接元器件构成被动式的热释电红外开关。它能自动快速开启各类白炽灯、荧光灯、蜂鸣器、自动门、电风扇、烘干机和自动洗手池等装置,特别适用于企业、宾馆、商场、库房及家庭的过道、走廊等敏感区域,或用于安全区域的自动灯光、照明和报警系统。 特点 *CMOS工艺 *数模混合 *具有独立的高输入阻抗运算放大器 *内部的双向鉴幅器可有效抑制干扰 *内设延迟时间定时器和封锁时间定时器 *采用16脚DIP封装 管脚图
管脚说明
工作原理 BISS0001是由运算放大器、电压比较器、状态控制器、延迟时间定时器以及封锁时间定时器等构成的数模混合专用集成电路。 以下图所示的不可重复触发工作方式下的波形,来说明其工作过程。不可重复触发工作方式下的波形 首先,根据实际需要,利用运算放大器OP1组成传感信号预处理电路,将信号放大。然后耦合给运算放大器OP2,再进行第二级放大,同时将直流电位抬高为VM(≈0.5VDD)后,将输出信号V2送到由比较器COP1和COP2组成的双向鉴幅器,检出有效触发信号Vs。由于VH≈0.7VDD、VL≈0.3VDD,所以,当VDD=5V时,可有效抑制±1V的噪声干扰,提高系统的可靠性。 COP3是一个条件比较器。当输入电压Vc 触发信号Vs向下级传递;而当Vc>VR时,COP3输出为高电平,进入延时周期。当A端接“0”电平时,在Tx时间内任何V2的变化都被忽略,直至Tx时间结束,即所谓不可重复触发工作方式。当Tx时间结束时,Vo下跳回低电平,同时启动封锁时间定时器而进入封锁周期Ti。在Ti时间内,任何V2的变化都不能使Vo跳变为有效状态(高电平),可有效抑制负载切换过程中产生的各种干扰。 以下图所示的可重复触发工作方式下的波形,来说明其工作过程。可重复触发工作方式下的波形在Vc=“0”、A=“0”期间,信号Vs不能触发Vo为有效状态。在Vc=“1”、A=“1”时,Vs可重复触发Vo为有效状态,并可促使Vo在Tx周期内一直保持有效状态。在Tx时间内,只要Vs发生上跳变,则Vo将从Vs上跳变时刻起继续延长一个Tx周期;若Vs保持为“1”状态,则Vo一直保持有效状态;若Vs保持为“0”状态,则在Tx周期结束后Vo恢复为无效状态,并且,同样在封锁时间Ti时间内,任何Vs的变化都不能触发Vo为有效状态。 新型红外雷达感应模块(电源) 产品概述:新型红外雷达感应模块(电源)是利用PIR 热释电与多普勒效应相结合原理设计而成的人体移动信号侦测器,它以非接触方式扫描人体PIR热释电信号的位置是否发生移动,继而产生相应的开关操作。该产品具有抗射频干扰能力强、不怕风吹草动、树叶摇曳、电风扇转动、空调冷热气体流动、浴室浴霸温度骤变......不受温度、湿度、强光、噪音、气流、尘埃等外界因数影响,能透过一定厚度的塑胶、玻璃、木制品等金属以外的物体,而对其侦测能力没有影响,能够非常方便的应用到设备控制、环境辅助光源控制、地下停车场、仓库、通道、走廊、洗手间等室内外的照明及防盗报警、视频监控、自动化设备控制等各种领域。 功能特点:新型红外雷达感应模块(电源)采用发射、接收为一体的平面天线和PIR热释电红外解码系统BISS0001形成的红外雷达移动波侦测新技术,通过多普勒扫描,侦测人体、车辆的动态信号,对灯具、报警装置等进行有效控制。产品独创抗干扰新技术,相互不干扰,安装不必考虑间接距离问题!可以安装在天花板或灯具内部,而侦测能力不会受到影响,更简洁、更美观、更隐蔽、更神秘、更安全! 模块类型 1、交流型:A C95-250V宽电压,适应各种不同地区电网电压。可控硅控制A C输出,无触点、无噪音、无污染、寿命长。具有自动测光管理功能(出厂未安装光敏电阻),实现白天(光线充足)呈关闭状态,晚上(光线不足)人来灯亮、人走灯灭。可做吸顶灯、日光灯及各种灯具、电器等的自动控制。 交流模块技术参数 ?工作电压:A C110V-250V(50-60H z) ?负载功率:阻性负载150W(节能灯、L E D灯80W) ?输出方式:可控硅控制、A C交流输出 ?自身功耗:静态功耗≤1m W ?感应范围:10-15米 ?感应角度:墙壁安装180°、吸顶安装360° ?触发方式:雷达扫描、人体感应、重复触发 ?延时时间:30秒钟(可定做各种延时时间) ?模块尺寸:36m m*23m m*23m m ?环境温度:-30℃-70℃ 微波雷达系统介绍 摘要:首先介绍了雷达的基本工作原理,对雷达的基本参数进行了简单的说明,而后对雷达中用到的微波器件做了说明,主要介绍了两种雷达结构,最后对雷达系统进行了简单总结。 关键词:雷达;微波 0前言 20世纪40年代,电磁波被用于发现目标和测量目标的距离,称之为“无线电探测和测距”(radio detecting and ranging ),取这几个英文字母便构成radar (雷达)一词。按照IEEE 的标准定义[1],雷达是通过发射电磁波信号,接收来自其威力覆盖范围内目标的回波,并从回波信号中提取位置和其他信息,以用于探测、定位,以及有时进行目标识别的电磁波系统。由于微波具有频带宽、穿透电离层能较强、似光性等优点,雷达就是利用了微波这些特性的典型代表。 1雷达的基本工作原理[2][4] 雷达的基本工作原理是,发射机通过天线向空间定向发送探测信号,信号被远距离的目标部分反射后,由天线接收并传送到接收机接收检测和信号处理,观测人员可以在接收机输出端显示屏上观测有无目标以及目标的性质和距离。如果发射和接收共用一副天线,叫做单站雷达;如果收、发系统各有自己的天线,则叫做双站雷达,分别如图1和图2所示。 G 图1单站雷达图 t G r G 图2双站雷达图 以单站雷达为例。发射功率t P ,发射天线增益G ,传输距离R ,则目标处的功率密度为 124t PG S R π=(W/m 2) 目标将在各个方向散射入射功率,在某个给定方向上的散射功率与入射功率密度之比定义为目标的雷达截面σ,表征目标的电磁散射特性,即 1 s P S σ=(m 2) 因此雷达截面具有面积的量纲,是目标本身的特性,它还依赖于入射角、反射角和入射波的偏振态。若把散射场看作二次源,二次辐射的功率密度为 222(4) t PG S R σπ=(W/m 2) 由天线的有效面积定义式24t RM eff i G P A S λπ ==,RM P 最大接收功率。可得,接收功率为 2234(4)t t r PG P R λσπ= 这就是雷达方程,接收功率单位W 。接收功率按4 1/R 减小,这意味着为了检测远距离目标,需要高功率发射机和高灵敏度接收机。 由于天线接收噪声和接收机噪声,存在接收机能够识别的最小监测功率。若这一功率是min P ,则得到最大可探测距离为 1/422max 3min (4)t t PG R P λσπ??=????(m ) 信号处理技术能够有效降低最小可检测信号,从而增加了可测量距离。 2雷达的基本参数[3] 2.1分辨率 分辨率可严格定义为分辨具有不同对比度的相隔一定距离的相邻目标的能力。一般习惯使用一个不太精确的定义,既对微波系统来说,分辨率通常是指测量系统响应的半功率宽度。 2.2角度分辨 毫米波雷达及辐射计通常都采用窄波束天线来提高角度分辨率。角度分辨一般采用半功率点的波束宽度来表示。其半功率点的波束宽度可表示为 h h K D λθ= h K —取决于天线类型和加权函数的系数;λ—波长;D —天线口径。 2.3距离分辨 大多数雷达都采用距离分辨概念。距离的分辨率由测量信号从雷达发至目标,并返回雷达所需的这一有限时间间隔决定。 当忽略大气对微波传播速度的影响(一般只有十万分之几的数量级),电波从雷达传播到目标往返引起的时间延迟,就是电波传播从雷达到目标的两倍距离的时间,可由下 人体红外感应测距——判断电脑休眠待机 一.项目概况 1.客户:联想 2.应用途径:装在电脑或一体机显示器模块上,用于判断是否有用户在电脑前,来控 制电脑进行休眠或者待机的操作。 3.基本原理:人体红外感应模块不断判断是否有人靠近电脑。有人靠近电脑后,红外 测距模块判断电脑前的人是否在向电脑靠近。如果进入一定的范围(比如人与电脑的 距离在80cm内),则通知电脑自动从休眠状态唤醒。如果人离开电脑到一定的距离,且出了人体感应范围(可设置为1—2米),且超过一定的时间。则判断用户离开电 脑,通知电脑进行休眠操作。 二.工作环境 1.工作环境:室温 2.工作电压:5V 三.产品及功能实现概述 1.产品框架 由图中我们可以看出此模块所用到的主要器件为: 1.红外发射头 2.红外接收头 3.热释电人体红外感应头 4.菲涅尔透镜 5.运算放大器 6.MCU 7.电阻电容若干 2.模块功能概述 (1)人体感应模块 感应范围:可以通过菲涅尔透镜配合人体红外感应探头调节。5—6米的距离内都可以实现;感应角度可以为60°—80°的锥形区域。 运算放大器:将人体红外感应模块感应到的电信号进行放大 (2)红外测距模块 红外发射头:发射经MCU编码的红外线 红外接收头:接收经MCU编码的红外线 抗干扰性:由于红外发射和接收的光信号都是通过特定编码的光信号,所以不会受其它红外射线的干扰。 红外发射的距离和范围:通过调节供给红外发射管的电流来调节红外发射管的发射距离。1—2米的距离内都可以实现;感应角度可以为60°—80°的锥形区域。 (3)MCU 1.产生用于红外发射头发射的的特殊编码驱动电信号。 2.接收由红外接收头收到的经编码的电信号。 3.结合红外人体感应模块返回的信号与红外接收头返回的信号来判断电脑面前 是否有用户。 4.发送特定的休眠、待机信号给EC。 (4)POWER POWER可以从主板上提取一个5V的电压 (5)与EC通讯的线路 这部分可通过座子、线材与主板连接,并最终加到EC芯片上。 3.工作模式 下面我们从上电开始分析各种不同情况下的工作判断模式 (1)开机后模块何时开始工作(有三种选择) 工作流程图如下: (2)模块正常工作后 用户用电脑有两种模式:1.在电脑前包公(离电脑比较近)2.用电脑看碟之类的休 闲活动(离电脑相对远一些);所以我们定义一个检测有 效距离D1。 功耗问题:如果红外测距与红外人体感应模块一直不停地工作,会导致此模块功 The future today with FURUNO's electronics technology. Catalogue No. R-185e TRADE MARK REGISTERED MARCA REGISTRADA Antenna Unit for FAR-2817/2827/2827W XN-12AF 33 kg 73 lb XN-20AF 39 kg 86 lb XN-24AF 42 kg 93 lb Antenna Unit for FAR-2837S/2837SW SN-30AF 127 kg 280 lb SN-36AF 133 kg 293.2 lb Display Unit MU-231CR 15.0 kg 33.0 lb Bracket mount Control Unit Full-keyboard type RCU-014 3.7 kg 8.2 lb Trackball type RCU-015 2.4 kg 5.3 lb Remote Control Unit RCU-016 2.4 kg 5.3 lb Panel mount Processor Unit RPU-013 10 kg 22 lb Transceiver Unit for FAR-2827W RTR-081 8.0 kg 17.6 lb Transceiver Unit for FAR-2837SW RTR-082 17.0 kg 37.5 lb 23.1" High resolution Multi-color LCD A utomatic R adar P lotting A id FAR-28x7 series 92 3.6" 398 15.7" 308 12.1"136 5.4"180 7.1" 4- 4 54 2.1"39 1.5"555 21.9" 18 0.7" 468 18.4" 124 4.9" 300 11.8" 4- 15 1260 49.6" 360 14.2" 411 16.2" 953.7" 498 19.6"418 16.5"183 7.2" 271.1" 350 13.8" 70.3" 385 15.2"370 14.6" 251.0" 340 13.4"380 15.0" 2- 7 410 16.1" 98 90 110 4.3"4- 4 160 6.3" 136 5.4"180 7.1" 89 3.5" 50 2.0"35 1.4"110 4.3"4- 4 160 6.3" 136 5.4"180 7.1" 89 3.5" 50 2.0"35 1.4"300 11.8" 468 18.4"137 5.4" 570 22.4" 180.7" XN-20AF: 2040 80.3"XN-24AF: 2550 100.4" 4- 15 432 17.0" 561 22.1"275 10.8" 378 14.9"420 16.5"710 28.0" 184 7.2" 421 16.6" 432 17.0" SN-36AF: 3765 148.2"SN-30AF: 3090 121.7" 570 22.4"598 23.5" 4- 8 313 12.3"505 19.9" 963.8" 301.2"803.2" 554 21.8" 570 22.4" 313 12.3" 471 18.5" 598 23.5" 590 23.2" Hand Grip (option)110 4.3 " 50 5 19 .9" 451 17.8" 35 287 11.3"352 13.9"Bracket (option) 26 1.0"4- 8 250 9.8" 12 0.5" 353 14.0"380 15.0" 251.0" 325 12.8" 165 6.5" 160 6.3"200 7.9"149 5.9" 157 6.2" 404 15.9"6- 10 270 10.6"88 3.5" 192 7.6" 457 18.0"210 8.3"210 8.3"150.6" 427 16.9" 15 0.6" 510 20.1" 1054.1"1054.1"8- 15 286 11.3" 250 9.8"432 17.0" 350 13.8"530 20.9" 1104.3"1104.3" 1003.9"1375.4" INTERCONNECTION DIAGRAM RW-9600, 15 m RW-9600, 15 m For FAR-2817/2827 DPYCY x 3 (DPYCY -6 x 2 + TPYCY -2.5) + TTYCY -4 + RG-12/U, 70 - 270 m DVI Monitor GPS Compass SC-50/110VDR AIS FA-1505 m IEC 61162-1250V-MPYC-7 Performance Monitor PM-51 For FAR-2837S For FAR-2827W/37SW Antenna Unit (Specify when ordering) Performance Monitor PM-31 for FAR-2827W PM-51 for FAR-2837SW Power Supply Unit PSU-007 250V-DPYCY -1.5 Processor Unit RPU-013Control Unit RCU-014 RCU-015 03S-961010/20/30 m 10/20/30 m 10/20/30 m Remote Control Unit RCU-016 DVI-Analog RGB Convirrsion Kit Gyro Interface GC-10 IEC 61162-1250V-TTYC-1IEC 61162-1250V-TTYC-4 DVI Gyro Converter AD-100 GP-90 (Position, SOG, COG)SDME (STW for ARP A) Gyrocompass 100-230 VAC, 1 , 50/60 Hz 440 VAC, 1 , 50/60 Hz* 24 VDC 115/230 VAC, 1 , 50/60 Hz 440 VAC, 1 , 50/60 Hz* 24 VDC T ransceiver Unit RTR-081 for FAR-2827W RTR-082 for FAR-2837SW 200 VAC, 3 , 50 Hz*220 VAC, 3 , 60 Hz 380 VAC, 3 , 50 Hz 440 VAC, 3 , 60 Hz Switching HUB HUB-100 Ethernet 100Base-TX Memory Card Interface Unit CU-200 FAR-21x7/28x7 ECDIS FER-2107/2807RW-960015/30/40/50 m Option or Shipyard Supply Power Specify power supply when ordering *Optional transformer required Display Unit MU-231CR Junction Box Junction Box Performance Monitor PM-31 RGB Connector D-Sub-BNC-1 AD-10 (exclude hand grips and bracket) TRADE MARK REGISTERED MARCA REGISTRADA SPECIFICATIONS SUBJECT TO CHANGE WITHOUT NOTICE 05125U Printed in Japan ? ?6543653654365(⊙o⊙) (363636536363564365465346536536535356436563563656) ?HC-SR501 普通型人体红外感应模块热释电红外传感器提 供电子资料 技术参数: 1.工作电压:DC5V至20V 2.静态功耗:65微安 3.电平输出:高3.3V,低0V 4.延时时间:可调(0.3秒~18秒) 5.封锁时间:0.2秒 6.触发方式:L不可重复,H可重复,默认值为H 7.感应范围:小于120度锥角,7米以内 8.工作温度:-15~+70度 9.PCB外形尺寸:32*24mm,螺丝孔距28mm,螺丝孔径2mm,感应透镜尺寸:(直径):23mm(默认) 功能特点: 1.全自动感应:当有人进as入其感应范围则输入高电平,人离开感应范围则自动延时关闭高电平。输出低电平。 2.光敏控制(可选):模块预留有位置,可设置光敏控制,白天或光线强时不感应。光敏控制为可选功能,出厂时未安装光敏电阻。如果需要,请另行购买光敏电阻自己安装。 光敏电阻请拍这里: 3.两种触发方式:L不可重复,H可重复。可跳线选择,默认为H。 A.不可重复触发方式:即c感应输出高电平后,延时时间一结束,输出将自动从高电平变为低电平。 B.可重复触发方式:即感应输出高电平后,在延时时间段内,如果有人体在其感应范围内活动,其输出将一直保持高电平,直到人离开后才延时将高电平变为低电平(感应模块检测到人体的每一 次活动后会自动顺延一个延时时间段,并且以最后一次活动的时间为延时时间的起始点)。 4.具有感应封锁时间(默认设置:0.2秒):感应模块在每一次感应输出后(高电平变为低电平),可以紧跟着设置一个封锁时间,在此时间段内感应器不接收任何感应信号。此功能可以实现(感应输出时间和封锁时间)两者的间隔工作,可应用于间隔探测产品;同时此功能可有效抑制负载切换过程中产生的各种干扰。 5.工作电压范围宽:默认工作电压DC5V至20V LampL-WR 微波感应模块 感应器发射频率:5.8GHz 感应原理:多普勒雷达 感应范围:8-15m 工作电压:额定电压DC 12V (8-16V ) 负载功率: 5——200W (需另外加继电器) 发射功率:<2mW PCB 规格:32*23MM (为两层叠加板) 模块规格:32*23*6MM 适用灯具:T8LED 灯管、吸顶灯、筒灯、泛光灯、庭院灯 适用范围:楼道,走廊,车库,阳台,院子场合,作为节能开关或者是报警装置用。 适用范围:感应灯饰,楼道,走廊,车库,阳台,院子场合,作为节能开关或者是报警装置用。本主要用在T8 电源配感应灯使用(车库感应灯) 微波模块的探测范围: 概述:本产品为多普勒雷达技术的自动感应控制产品,灵敏度高,感应距离远,可靠性强,感应角度大,供电电压范围广等特点。广泛应用于各种人体感应照明的场合,防盗报警场合。 功能特点:本微波感应采用先进技术采用平面天线发射及接受微波 本微波感应采用开关为主动式传感器,感应器发射高频电磁波(5.8GHz)并接收他们的回波。 此感应器探测回波内的变化甚至是真探测范围内微小的移动,然后微处理器触发,执行指令. 信号通过门、玻璃板及薄的墙壁都有可能被探测到,注意:人或物体向着感应器移动时的探测效果最好!本产品抗干扰能力强,几乎不受风,热等外籍环境因素的干扰,不会随使用时间的延长而缩短感应距离。很好地避免了红外人体感应的缺点,真正实现了可靠的移动感应器。 技术参数: 1.电源电压:DC 12V (或8-16V ) 2.安装方式:壁挂安装、吸顶安装、T8 两头内置安装 3.发射功率:<2mW 4.负载功率:可以作为触发信号用,也可以按要求加装继电器。 5.探测角度:180° 6.探测距离:8-15m 7.工作延时:默认约是30秒(如需其他时间自行调整。可调整电子版背面斜着的电阻R15B电阻大小来改变时间长短)大批量可以定制(5K PCS)) 8.探测距离:默认约是8m(如有其他需求可以自行调整。可调整电子版背面斜着的电阻R15A电阻大小来改变探测距离长短)大批量可以定制(5K PCS)) 9.微波感应开关为主动式传感器,感应器发射高频电磁波并接收他们的回波, 关于输出,可按客户要求输出高电平,低电平,低电平拉载100-200MA,直接连接继电器等. 注意事项: 带你认识基本的传感器特性参数 复性、精度、分辨率、零点漂移、带宽,本文将对这些参数进行一一介绍。 量程 每个传感器都有自身的测量范围,被测量处在这个范围内时,传感器的输出信号才是有一定的准确性的。 传感器的量程X FS、满量程输出值Y FS、测量上限X max、测量下限X min的关系见下图。 灵敏度 传感器的灵敏度是指其输出变化量ΔY与输入变化量ΔX的比值,可以用k表示。对于一个线性度非常高的传感器来说,也可认为等于其满量程输出值Y FS与量程X FS的比值。灵敏度高通常意味着传感器的信噪比高,这将会方便信号的传递、调理及计算。 k=ΔY ΔX 线性度 传感器的线性度又称非线性误差,是指传感器的输出与输入之间的线性程度。理想的传感器输入-输出关系应该是程线性的,这样使用起来才最为方便。但实际中的传感器都不具备这种特性,只是不同程度的接近这种线性关系。 实际中有些传感器的输入-输出关系非常接近线性,在其量程范围内可以直接用一条直线来拟合其输入-输出关系。有些传感器则有很大的偏离,但通过进行非线性补偿、差动使用等方式,也可以在工作点附近一定的范围内用直线来拟合其输入-输出关系。 选取拟合直线的方法很多,上图表示的是用最小二乘法求得的拟合直线,这是拟合精度最高的一种方法。实际特性曲线与拟合直线之间的偏差称之为传感器的非线性误差δ,其最大值与满量程输出值Y FS的比值即为线性度γL。 γL=± δ Y FS ×100% 迟滞 当输入量从小变大或从大变小时,所得到的传感器输出曲线通常是不重合的。也就是说,对于同样大小的输入信号,当传感器处于正行程或反行程时,其输出值是不一样大的,会有一个差值ΔH,这种现象称为传感器的迟滞。 产生迟滞现象的主要原因包括传感器敏感元件的材料特性、机械结构特性等,例如运动部件的摩擦、传动机构间隙、磁性敏感元件的磁滞等等。迟滞误差γH的具体数值一般由实验方法得到,用正反行程最大输出差值ΔH max的一半对其满量程输出值Y FS的比值来表示。 γH=±?H max FS ×100% 重复性 一个传感器即便是在工作条件不变的情况下,若其输入量连续多次地按同一方向(从小到大或从大到小)做满量程变化,所得到的输出曲线也是会有不同的,可以用重复性误差γR 来表示。 重复性误差是一种随机误差,常用正行程或反行程中的最大偏差ΔY max的一半对其满量程输出值Y FS的比值来表示。 HC-SR501 人体红外感应模块热释电红外传感器探头 功能特点: 1.全自动感应:当有人进入其感应范围则输入高电平,人离开感应范围则自动延时关闭高电平。输出低电平。 2.光敏控制(可选):模块预留有位置,可设置光敏控制,白天或光线强时不感应。光敏控制为可选功能,出厂时未安装光敏电阻。如果需要,请另行购买光敏电阻自己安装。 3.两种触发方式:L不可重复,H可重复。可跳线选择,默认为H。 A.不可重复触发方式:即感应输出高电平后,延时时间一结束,输出将自动从高电平变为低电平。 B.可重复触发方式:即感应输出高电平后,在延时时间段内,如果有人体在其感应范围内活动,其输出将一直保持高电平,直到人离开后才延时将高电平变为低电平(感应模块检测到人体的每一次活动后会自动顺延一个延时时间段,并且以最后一次活动的时间为延时时间的起始点)。 4.具有感应封锁时间(默认设置:3-4秒):感应模块在每一次感应输出后(高电平变为低电平),可以紧跟着设置一个封锁时间,在此时间段内感应器不接收任何感应信号。此功能可以实现(感应输出时间和封锁时间)两者的间隔工作,可应用于间隔探测产品;同时此功能可有效抑制负载切换过程中产生的各种干扰。 5.工作电压范围宽:默认工作电压DC5V至20V 6.微功耗:静态电流65微安,特别适合干电池供电的电器产品。 7.输出高电平信号:可方便与各类电路实现对接。 使用说明: 1感应模块通电后有一分钟左右的初始化时间,在此时间模块会间隔地输出0-3次,一分钟后进入待机状态。 2. 应尽量避免灯光等干扰源近距离直射模块表面的透镜,以免引进干扰信号产生误动作;使用环境尽量避免流动的风,风也会对感应器造成干扰。 3. 感应模块采用双元探头,探头的窗口为长方形,双元(A元B元)位于较长方向的两端,当人体从左到右或从右到左走过时,红外光谱到达双元的时间、距离有差值,差值越大,感应越灵敏,当人体从正面走向探头或从上到下或从下到上方向走过时,双元检测不到红外光谱距离的变化,无差值,因此感应不灵敏或不工作;所以安装感应器时应使探头双元的方向与人体活动最多的方向尽量相平行,保证人体经过时先后被探头双元所感应。为了增加感应角度范围,本模块采用圆形透镜,也使得探头四面都感应,但左右两侧仍然比上下两个方向感应范围大、灵敏度强,安装时仍须尽量按以上要求。微波感应模块规格说明书
微波雷达系统介绍
人体感应模块(方案)
雷达说明书
HC-SR501 普通型 人体红外感应模块
T8 LED微波感应模块参数
带你认识基本的传感器特性参数
人体红外感应模块