职高高二数学教案坐标变换与参数方程(供参考)
第二十二课时:坐标轴的平移(一)
【教学目标】
知识目标:
(1)理解坐标轴平移的坐标变换公式;
(2)掌握点在新坐标系中的坐标和在原坐标系中的坐标的计算;
能力目标:
通过对坐标轴平移的坐标变换公式的学习,使学生的计算技能与计算工具使用技能得到锻炼和提高.
【教学重点】
坐标轴平移中,点的新坐标系坐标和原坐标系坐标的计算.
【教学难点】
坐标轴平移的坐标变换公式的运用.
【教学设计】
学生曾经学习过平移图形.平移坐标轴和平移图形是两种相关的变化方式,从平移的运动过程上看,平移坐标轴和平移图形是两种相反的过程.向左平移图形的效果相当于将坐标轴向右平移相同的单位;向上平移图形的效果相当于将坐标轴向下平移相同单位.要强调坐标轴平移只改变坐标原点的位置,而不改变坐标轴的方向和单位长度.坐标轴平移的坐标变换公式,教材中是利用向量来进行推证的,教学时要首先复习向量的相关知识.例1是利用坐标轴平移的坐标变换公式求点的新坐标系坐标的知识巩固性题目,教学中要强调公式中各量的位置,可以根据学生情况,适当补充求点在原坐标系中坐标的题目.例2是利用坐标轴平移的坐标变换公式化简曲线方程的知识巩固性题目.教学中要强调新坐标系原点设置的原因,让学生理解为什么要配方.
【课时安排】
1课时.
【教学过程】
揭示课题
2.1坐标轴的平移与旋转
创设情境 兴趣导入
在数控编程和机械加工中,经常出现工件只作旋转运动(主运动),而刀具发生与工件相对的进给运动.为了保证切削加工的顺利进行,经常需要变换坐标系.
例如,圆心在O 1(2,1),半径为1的圆的方程为
1)1()2(22=-+-y x .
对应图形如图2-1所示.如果不改变坐标轴的方向和单位长度,将坐标原点移至点1O 处,那么,对于新坐标系111x O y ,该圆的方程就是
12121=+y x .
图2-1
动脑思考 探索新知
只改变坐标原点的位置,而不改变坐标轴的方向和单位长度的坐标系的变换,叫做坐标轴的平移.
下面研究坐标轴平移前后,同一个点在两个坐标系中的坐标之间的关系,反映这种关系的式子叫做坐标变换公式.
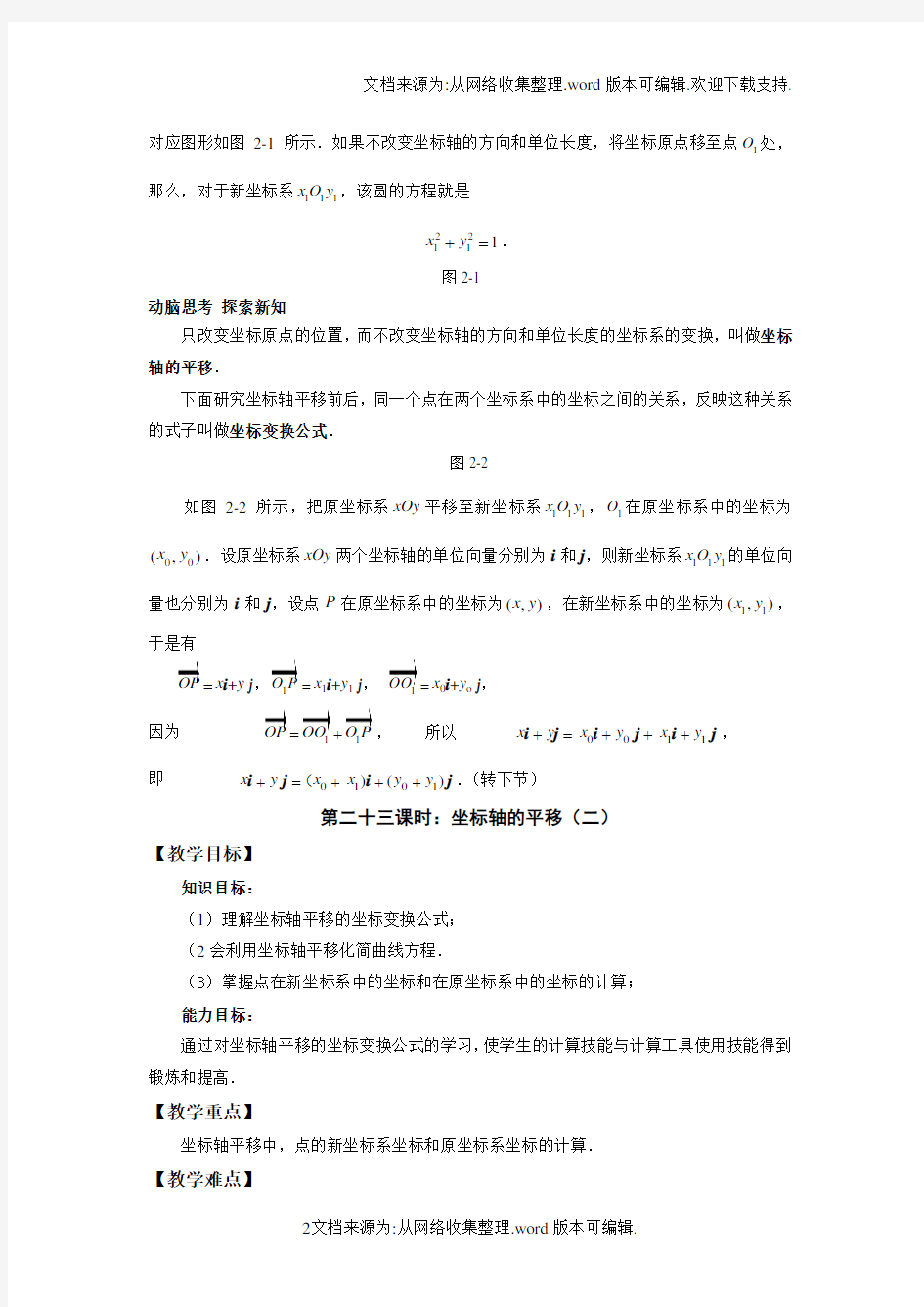
图2-2
如图2-2所示,把原坐标系xOy 平移至新坐标系111x O y ,1O 在原坐标系中的坐标为),(00y x .设原坐标系xOy 两个坐标轴的单位向量分别为i 和j ,则新坐标系111x O y 的单位向量也分别为i 和j ,设点P 在原坐标系中的坐标为),(y x ,在新坐标系中的坐标为),(11y x ,于是有
OP =x i +y j ,1O P =x 1i +y 1 j , 1OO =x 0i +y o j ,
因为 11OP OO O P =+, 所以 0011 x y x y x y +=+++i j i j i j ,
即 0101 )()x y x x y y +=+++i j i j (.(转下节)
第二十三课时:坐标轴的平移(二)
【教学目标】
知识目标:
(1)理解坐标轴平移的坐标变换公式;
(2会利用坐标轴平移化简曲线方程.
(3)掌握点在新坐标系中的坐标和在原坐标系中的坐标的计算;
能力目标:
通过对坐标轴平移的坐标变换公式的学习,使学生的计算技能与计算工具使用技能得到锻炼和提高.
【教学重点】
坐标轴平移中,点的新坐标系坐标和原坐标系坐标的计算.
【教学难点】
选修坐标系与参数方程高考复习讲义
选修4-4坐标系与参数方程高考复习讲义 本部分是人教A 版教材选修模块内容,主要对极坐标的概念、点的极坐标及简单曲线的极坐标方程进行考查。对于参数方程,主要考查直线、圆与圆锥曲线参数方程的应用。参数方程是解析几何、平面向量、三角函数、圆锥曲线与方程等知识的综合应用和进一步深化,是研究曲线的工具,特别值得关注。最重要的是它是新课标全国卷三个选考模块中难度系数最高的,明显比另两个模块简单。 第一节坐标系 基本知识点: 1.平面直角坐标系中的坐标伸缩变换 设点P(x ,y)是平面直角坐标系中的任意一点,在变换φ: ??? x′=λ·x, λ>0, y′=μ·y, μ>0 的作用下,点P(x ,y)对应到点P′(x′,y′),称φ为平面直角坐标系中的坐标伸缩变换,简称伸缩变换. 2.极坐标系与极坐标 (1)极坐标系:如图所示,在平面内取一个定点O ,叫做极点, 自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位, 一个角度单位(通常取弧度)及其正方向(通常取逆时针方向), 这样就建立了一个极坐标系. (2)极坐标:设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴 Ox 为始边,射线OM 为终边的角xOM 叫做点M 的极角,记为θ.有序数对(ρ,θ)叫做点M 的极坐标,记为M(ρ,θ)不做特殊说明时,我们认为ρ≥0,θ可取任意实数. 3.极坐标与直角坐标的互化 设M 是坐标系平面内任意一点,它的直角坐标是(x ,y),极坐标是(ρ,θ)(ρ≥0),于是极坐标与直角坐标的互化公式如下表: 点M 直角坐标(x ,y) 极坐标(ρ,θ) 互化公式 ?? ? x =ρcos θy =ρsin θ ? ?? ρ2=x 2+y 2 tan θ=y x x≠0
2018年高考备考极坐标与参数方程专题
专题1 极坐标与参数方程 【基本方法】 1.两大坐标系:直角坐标系(普通方程、参数方程);极坐标系(极坐标方程); 2.基本转化公式: cos sin x y ρθ ρθ = ? ? = ? , 222 (0) tan x y x y x ρ θ ?=+ ? ≠ ? = ?? ; 3.参数方程: () () x f t y g t = ? ? = ? ,消去参数t得关于,x y的普通方程,引入参数t得参数方程; 4.直线的参数方程0 0cos sin x x t y y t αα =+ ? ? =+ ? (t为参数),注意参数t的几何意义;5.用转化法解决第(1)问,用图形法解决第(2)问. 【三年真题】 1.(2017全国I)在直角坐标系xOy中,曲线C的参数方程为 3cos, sin, x y θ θ = ? ? = ? (θ为参数),直线l的 参数方程为 4, 1, x a t t y t =+ ? ? =- ? (为参数). (1)若1 a=-,求C与l的交点坐标; (2)若C上的点到l a. 2.(2016全国I)在直角坐标系xOy中,曲线C1的参数方程为 cos 1sin x a t y a t = ? ? =+ ? (t为参数, a>).在以坐标原点为极点,x轴正半轴为极轴的极坐标系中,曲线C2:ρ=4cos θ. (I)说明C1是哪种曲线,并将C1的方程化为极坐标方程; (II)直线C3的极坐标方程为θ=α0,其中α0满足tan α0=2,若曲线C1与C2的公共点都在C3上,求a.
3.(2015全国I)在直角坐标系xOy 中,直线1C : x =-2,圆2C :()()22 121x y -+-=,以 坐标原点为极点,x 轴的正半轴为极轴建立极坐标系. (I)求1C ,2C 的极坐标方程; (II)若直线3C 的极坐标方程为()4 θρπ =∈R ,设2C 与3C 的交点为M ,N ,求2C MN △的面积. 【自主研究】 4.(2016届佛山二模)已知曲线C 的极坐标方程为4sin()3 ρθπ =-,以极点为原点, 极轴为x 轴正半轴,建立直角坐标系xOy . (I)求曲线C 的直角坐标方程; (II)若点P 在曲线C 上,点Q 的直角坐标是(cos ,sin )?? (其中)?∈R ,求PQ 的最大值. 5.(2016届河南八市质检)在直角坐标系xOy 中,曲线C 的参数方程为333x y θ θ ???=??=cos sin (θ为参 数),以原点O 为起点,x 轴的正半轴为极轴,建立极坐标系,已知点P 的极坐标为(2,-3 π ), 直线l 的极坐标方程为ρcos(3 π +θ)=6. (Ⅰ)求点P 到直线l 的距离; (Ⅱ)设点Q 在曲线C 上,求点Q 到直线l 的距离的最大值. 6.(2016年全国卷II )在直角坐标系xOy 中,圆C 的方程为2 2 (6)25x y ++=. (Ⅰ)以坐标原点为极点,x 轴正半轴为极轴建立极坐标系,求C 的极坐标方程; (Ⅱ)直线l 的参数方程是cos sin x t y t α α=??=? (t 为参数), l 与C 交于,A B 两点,||10AB =,求l 的 斜率.
《坐标系与参数方程》练习题(含详解)
数学选修4-4 坐标系与参数方程 [基础训练A 组] 一、选择题 1.若直线的参数方程为12()23x t t y t =+??=-? 为参数,则直线的斜率为( ) A . 23 B .2 3- C .32 D .32 - 2.下列在曲线sin 2()cos sin x y θ θθθ=??=+? 为参数上的点是( ) A .1(,2 B .31 (,)42 - C . D . 3.将参数方程2 2 2sin ()sin x y θ θθ ?=+??=??为参数化为普通方程为( ) A .2y x =- B .2y x =+ C .2(23)y x x =-≤≤ D .2(01)y x y =+≤≤ 4.化极坐标方程2cos 0ρθρ-=为直角坐标方程为( ) A .2 01y y +==2 x 或 B .1x = C .2 01y +==2 x 或x D .1y = 5.点M 的直角坐标是(1-,则点M 的极坐标为( ) A .(2, )3π B .(2,)3π- C .2(2,)3π D .(2,2),()3 k k Z π π+∈ 6.极坐标方程cos 2sin 2ρθθ=表示的曲线为( ) A .一条射线和一个圆 B .两条直线 C .一条直线和一个圆 D .一个圆 二、填空题 1.直线34()45x t t y t =+?? =-?为参数的斜率为______________________。 2.参数方程()2() t t t t x e e t y e e --?=+??=-??为参数的普通方程为__________________。 3.已知直线113:()24x t l t y t =+?? =-?为参数与直线2:245l x y -=相交于点B ,又点(1,2)A ,
极坐标与参数方程专题答案
2015年极坐标与参数方程专题答案 1 【解析】根据直线的位置特点,设出所求直线上点的坐标为(ρ,θ),结合三角形的知识建立ρ和θ之间的等式,即可求出该直线的极坐标方程. 设直线上任意一点的坐标是(ρ,θ), 由正弦定理 即 2 【解析】根据变换法则建立曲线C1的参数方程,求出普通方程,根据极坐标方程,曲线C2 的方程也是圆,求出普通方程即可求出公共弦长. (α为参数 )上的每一点纵坐标不变,横坐标变为原来的一半得到 1 最后横坐标不变,纵坐标变为原来的 2 所以C1为(x-1)2+y2=4. 又C2为ρ=4sinθ,化为直角坐标方程为x2+y2=4y, 所以C1和C2公共弦所在直线为2x-4y+3=0,所以(1,0)到2x -4y+3=0 3.2 【解析】1.利用两种坐标的互化,可以把不熟悉的问题转化为熟悉的问题,这二者互化的前提条件是:(1)极点与原点重合;(2)极轴与x轴正方向重合;(3)取相同的单位长度.2.参数方程化为普通方程常见方法有三种:(1)代入法:利用解方程的技巧求出参数t,然后代入消去参数.(2)三角法:利用三角恒等式消去参数.(3)整体消元法:根据参数方程本身的结构特征,从整体上消去.化参数方程为普通方程F(x,y)=0时,在消参过程中注意变量x、y取值范围的一致性. 由C1 (x-4)2+(y-3)2=1;由C2:ρ=2得x2+y2=4,两圆圆心距
为5,两圆半径分别为1和2,故|AB|≥2,最小值为2. 4 由已知,以过原点的直线倾 斜角θ为参数,则 以 。所以所求圆的参数方程 为 本题考查与圆的参数方程有关的问题,涉及圆的标准方程和参数方程等知识,属于容易题。5 该题主要考查参数方程,极坐标系、极坐标方程以及它们的关系. 6 4 π θ?? += ? ? ? 对 7.2 【解析】本题考查抛物线的参数方程及抛物线的性质,考查运算求解能力及转化思想,中档 题. 化为普通方程为y2=2px(p>0),并且 又∵|EF|=|MF|=|ME|,即有3 p=±2(负值舍去),即p=2. 8 【解析】考查极坐标方程,关键是写出直线的极坐标方程,再按要求化简.
坐标系与参数方程(题型归纳)
坐标系与参数方程 (一)极坐标系: 1、定义:在平面内取一个定点O ,叫做极点,引一条射线Ox ,叫做 极轴,再选一个长度单位和角度的正方向(通常取逆时针方向).对于平面内的任意一点M ,用ρ表示线段OM 的长度,θ表示从Ox 到OM 的角,ρ叫做点M 的极径,θ叫做点M 的极角,有序数对(ρ, θ)就叫做点M 的极坐标.这样建立的坐标系叫做极坐标系. 2、极坐标与直角坐标互化公式: ★极坐标与直角坐标的互化公式:? ??==θρθ ρsin cos y x , ?? ? ? ?≠=+=0,tan 2 22x x y y x θρ。 ★极坐标与直角坐标的互化的前提: ①极点与直角坐标的原点重合;②极轴与x 轴的正方向重合;③两种坐标系中取相同的长度单位。 例如:极坐标方程cos sin 11x y ρθρθ+=?+=(在转化成,x y 时要设法构造cos ,sin ρθρθ , 然后进行整体代换即可) 3、求极坐标方程的两种方法: ★处理极坐标系中问题大致有两种思路: (1)公式互化法:把极坐标方程与直角坐标方程进行互化; (2)几何法:利用几何关系(工具如:三角函数的概念、正弦定理、余弦定理)建立ρ与θ的方程. (二)参数方程: 1、参数方程的定义: 如果曲线(),0F x y =中的变量,x y 均可以写成关于参数t 的函数()()x f t y g t =???=??,那么()() x f t y g t =???=?? 就称为该曲线的参数方程,其中t 称为参数。 2、常见的消参技巧: (1)代入法:()3 ()2333723x t t y x y x y t =+??=+-?=-? =+? 为参数 (2)整体消元法:2211 x t t y t t ? =+??? ?=+?? ()t 为参数,由222112t t t t ?? +=++ ???可得:22x y =+ (3)三角函数法:利用22 sin cos 1θθ+=消去参数 例如:22cos 3cos 3 ()12sin 94sin 2 x x x y y y θθθθθ? =?=????+=? ?=??= ??为参数
高中数学选修4-4坐标系与参数方程完整教案
第一讲坐标系 一平面直角坐标系 课题:1、平面直角坐标系 教学目的: 知识与技能:回顾在平面直角坐标系中刻画点的位置的方法 能力与与方法:体会坐标系的作用 情感、态度与价值观:通过观察、探索、发现的创造性过程,培养创新意识。 教学重点:体会直角坐标系的作用 教学难点:能够建立适当的直角坐标系,解决数学问题 授课类型:新授课 教学模式:启发、诱导发现教学. 教具:多媒体、实物投影仪 教学过程: 一、复习引入: 情境1:为了确保宇宙飞船在预定的轨道上运行,并在按计划完成科学考察任务后,安全、准确的返回地球,从火箭升空的时刻开始,需要随时测定飞船在空中的位 置机器运动的轨迹。 情境2:运动会的开幕式上常常有大型团体操的表演,其中不断变化的背景图案是由看台上座位排列整齐的人群不断翻动手中的一本画布构成的。要出现正确的背景 图案,需要缺点不同的画布所在的位置。 问题1:如何刻画一个几何图形的位置? 问题2:如何创建坐标系? 二、学生活动 学生回顾 刻画一个几何图形的位置,需要设定一个参照系 1、数轴它使直线上任一点P都可以由惟一的实数x确定 2、平面直角坐标系 在平面上,当取定两条互相垂直的直线的交点为原点,并确定了度量单位和这两条直线的方向,就建立了平面直角坐标系。它使平面上任一点P都可以由惟一的实数对(x,y)确定 3、空间直角坐标系 在空间中,选择两两垂直且交于一点的三条直线,当取定这三条直线的交点为原点,并确定了度量单位和这三条直线方向,就建立了空间直角坐标系。它使空间上任一点P 都可以由惟一的实数对(x,y,z)确定 三、讲解新课: 1、建立坐标系是为了确定点的位置,因此,在所建的坐标系中应满足: 任意一点都有确定的坐标与其对应;反之,依据一个点的坐标就能确定这个点的位置 2、确定点的位置就是求出这个点在设定的坐标系中的坐标 四、数学运用 例1 选择适当的平面直角坐标系,表示边长为1的正六边形的顶点。
极坐标与参数方程专题复习
极坐标与参数方程专题复习
————————————————————————————————作者:————————————————————————————————日期:
试卷第8页,总6页 极坐标与参数方程专题复习 学校:___________姓名:___________班级:___________考号:___________ 一、知识点总结 1.直线的参数方程 (1)标准式过点()000P ,x y ,倾斜角为α的直线l (如图)的参数方程是 ? ? ?+=+=a t y y a t x x sin cos 00 (t 为参数) 定点()000P ,x y 加t 个单位向量就是动点 于是,t 的绝对值就是定点和动点间的距离, (2)一般式?? ?+=+=bt y y at x x 00(t 为参数) 转化为标准式 ??? ? ??? ++=++=t b a b y y t b a a x x 2202 20 2.圆锥曲线的参数方程。“1”的代换 (1)圆()() 22 2 x a y b r -+-=cos sin x a r y b r θ θ=+?? =+? (θ是参数) θ是动半径所在的直线与x 轴正向的夹角,θ∈[]0,2π (2)椭圆122 22 =+b y a x cos sin x a y b θ θ=??=? (θ为参数)
试卷第8页,总6页 椭圆 1 22 22=+b y a y cos sin x b y a θ θ=?? =? (θ为参数) 3.极坐标 (1)极坐标与直角坐标互换。222cos sin x y x y ρρθρθ?=+? =??=? (2)过原点倾斜角为α的直线的极坐标方程:θα= (3)圆心在原点,半径为r 的圆极坐标方程:r ρ= 二、例题示范 题型一、坐标的互化。(略) 题型二、参数方程的本质(表示点)。 1、点到点、点到直线距离的最值。参数方程看做点带入距离公式。 2、点的轨迹方程。参数方程看做点,同时使用跟踪点发。 例1.在直角坐标系xOy 中,直线l 的参数方程为33x t y t =+???=??(t 为参数),以 原点为极点,x 轴正半轴为极轴建立极坐标系,圆C 的极坐标方程为 23sin ρθ=. (1)写出直线l 的普通方程及圆C 的直角坐标方程; (2)点P 是直线l 上的点,求点P 的坐标,使P 到圆心C 的距离最小.
高中数学选修4-4坐标系与参数方程完整教案(精选.)
选修4-4教案 教案1平面直角坐标系(1课时) 教案2平面直角坐标系中的伸缩变换(1课时)教案3极坐标系的的概念(1课时) 教案4极坐标与直角坐标的互化(1课时) 教案5圆的极坐标方程(2课时) 教案6直线的极坐标方程(2课时) 教案7球坐标系与柱坐标系(2课时) 教案8参数方程的概念(1课时) 教案9圆的参数方程及应(2课时) 教案10圆锥曲线的参数方程(1课时) 教案11圆锥曲线参数方程的应用(1课时) 教案12直线的参数方程(2课时) 教案13参数方程与普通方程互化(2课时) 教案14圆的渐开线与摆线(1课时)
课题:1、平面直角坐标系 教学目的: 知识与技能:回顾在平面直角坐标系中刻画点的位置的方法 能力与与方法:体会坐标系的作用 情感、态度与价值观:通过观察、探索、发现的创造性过程,培养创新意识。 教学重点:体会直角坐标系的作用 教学难点:能够建立适当的直角坐标系,解决数学问题 授课类型:新授课 教学模式:互动五步教学法 教具:多媒体、实物投影仪 复习及预习提纲: 1平面直角坐标系中刻画点的位置的方法 2坐标系的作用 ————教学过程———— 复习回顾和预习检查 1平面直角坐标系中刻画点的位置的方法 2坐标系的作用 创设情境,设置疑问 情境1:为了确保宇宙飞船在预定的轨道上运行,并在按计划完成科学考察任务后,安全、准确的返回地球,从火箭升空的时刻开始,需要随时测定飞船在空中的位 置机器运动的轨迹。 情境2:运动会的开幕式上常常有大型团体操的表演,其中不断变化的背景图案是由看台上座位排列整齐的人群不断翻动手中的一本画布构成的。要出现正确的背景 图案,需要缺点不同的画布所在的位置。 问题1:如何刻画一个几何图形的位置? 问题2:如何创建坐标系? 分组讨论 刻画一个几何图形的位置,需要设定一个参照系 1、数轴它使直线上任一点P都可以由惟一的实数x确定 2、平面直角坐标系 在平面上,当取定两条互相垂直的直线的交点为原点,并确定了度量单位和这两条直线的方向,就建立了平面直角坐标系。它使平面上任一点P都可以由惟一的实数对(x,y)确定 3、空间直角坐标系 在空间中,选择两两垂直且交于一点的三条直线,当取定这三条直线的交点为原点,并确定了度量单位和这三条直线方向,就建立了空间直角坐标系。它使空间上任一点P 都可以由惟一的实数对(x,y,z)确定 1、建立坐标系是为了确定点的位置,因此,在所建的坐标系中应满足: 任意一点都有确定的坐标与其对应;反之,依据一个点的坐标就能确定这个点的位置2、确定点的位置就是求出这个点在设定的坐标系中的坐标
北师大版2018-专题突破——极坐标与参数方程专题
极坐标与参数方程专题(1)——直线参数t几何意义的应用1.(2018?银川三模)在平面直角坐标系xoy中,以O为极点,x轴非负半轴为极轴建立极坐标系,已知曲线C的极坐标方程为ρsin2θ=4cosθ,直线l的参数方程为:(t为参 数),两曲线相交于M,N两点. (Ⅰ)写出曲线C的直角坐标方程和直线l的普通方程; (Ⅱ)若P(﹣2,﹣4),求|PM|+|PN|的值. 解:(Ⅰ)根据x=ρcosθ、y=ρsinθ,求得曲线C的直角坐标方程为y2=4x, 用代入法消去参数求得直线l的普通方程x﹣y﹣2=0. (Ⅱ)直线l的参数方程为:(t为参数), 代入y2=4x,得到,设M,N对应的参数分别为t1,t2, 则t1+t2=12,t1?t2=48,∴|PM|+|PN|=|t1+t2|=. 2.(2018?乐山二模)已知圆C的极坐标方程为ρ=2cosθ,直线l的参数方程为 (t为参数),点A的极坐标为(,),设直线l与圆C交于点P、Q两点.(1)写出圆C的直角坐标方程;(2)求|AP|?|AQ|的值. 解:(1)圆C的极坐标方程为ρ=2cosθ即ρ2=2ρcosθ,即(x﹣1)2+y2=1,表示以C(1,0)为圆心、半径等于1的圆. (2)∵点A的直角坐标为(,),∴点A在直线(t为参数)上. 把直线的参数方程代入曲线C的方程可得t2+t﹣=0. 由韦达定理可得t1?t2=﹣<0,根据参数的几何意义可得|AP|?|AQ|=|t1?t2|=.
3.(2018?西宁模拟)在直角坐标系xOy中,以坐标原点为极点,x轴正半轴为极轴建立极坐标系,已知直线l的极坐标方程为ρcosθ+ρsinθ﹣=0,C的极坐标方程为ρ=4sin(θ﹣).(I)求直线l和C的普通方程; (II)直线l与C有两个公共点A、B,定点P(2,﹣),求||PA|﹣|PB||的值. 解:(I)直线l的极坐标方程为ρcosθ+ρsinθ﹣=0,所以:直线l的普通方程为: , 因为圆C的极坐标方程为为ρ=4sin(θ﹣),所以圆C的普通方程:.(II)直线l:的参数方程为:(t为参数), 代入圆C2的普通方程:消去x、y整理得:t2﹣9t+17=0,t1+t2=9,t1t2=17, 则:||PA|﹣|PB||=,=. 4.(2018?内江三模)在直角坐标系xOy中,直线l过点P(1,﹣2),倾斜角为.以坐标原点O为极点,x轴的正半轴为极轴建立极坐标系,曲线C的极坐标方程为ρ=4cosθ,直线l与曲线C交于A,B两点. (Ⅰ)求直线l的参数方程(设参数为t)和曲线C的普通方程;(Ⅱ)求的值.解:(Ⅰ)∵直线l过点P(1,﹣2),倾斜角为. ∴直线l以t为参数的参数方程为,(t为参数)…(3分) ∵曲线C的极坐标方程为ρ=4cosθ.∴曲线C的普通方程为(x﹣2)2+y2=4.…(5分)(Ⅱ)将直线l的参数方程,(t为参数)代入曲线C的普通方程(x﹣2)2+y2=4,
坐标系与参数方程-知识点总结
坐标系与参数方程 1.平面直角坐标系中的坐标伸缩变换 设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0) x x y y λλ?μμ'=>?? '=>?的 作用下,点P(x,y)对应到点(,)P x y ''',称?为平面直角坐标系中的坐标伸缩变换,简称伸缩变换. 2.极坐标系的概念 (1)极坐标系 如图所示, 在平面取一个定点O ,叫做极点, 自极点O 引一条射线Ox ,叫做极轴; 再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系. 注:(i)极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景; (ii)平面直角坐标系的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系. (2)极坐标 设M 是平面一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ; 以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ. 有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ. 一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面一个点的极坐标有无数种表示. 如果规定0,02ρθπ>≤<,那么除极点外,平面的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的.
3.极坐标和直角坐标的互化 (1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴 作为极轴,并在两种坐标系中取相同的长度单位,如图所示: (2)互化公式:设M 是坐标平面任意一点,它的直角 坐标是(,)x y ,极坐标是(,)ρθ(0ρ≥),于是极坐标与 直角坐标的互化公式如下: 极坐标(,)ρθ 直角坐标(,)x y : cos sin x y ρθ ρθ=??=? 直角坐标(,)x y 极坐标(,)ρθ: 222 tan (0) x y y x x ρθ=+=≠ 在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角. 4.常见曲线的极坐标方程
极坐标与参数方程专题复习汇编
坐标系与参数方程 一、考试大纲解析: 1?坐标系 (1) 理解坐标系的作用; (2) 了解平面坐标系伸缩变换作用下图形的变化情况; (3) 能在坐标系中用极坐标表示点的位置,理解在极坐标和平面之间坐标系表示点的位 置的区别,能进行极坐标和直角坐标的互化; (4) 能在极坐标系中给出简单图形的方程,通过比较这些图形在极坐标和直角坐标系中 的方程,理解用方程表示平面图形时选择适当坐标系的意义; 2?参数方程 (1) 了解参数方程和参数方程的意义; (2) 能选择适当的参数写出直线、圆、圆锥曲线的参数方程; (3) 能用参数方程解决一些数学问题和实际的运用; 极坐标和参数方程是新课标考纲里的选考内容之一, 在每年的高考试卷中,极坐标和参 数方程都是放在选作题的一题中来考查。 由于极坐标是新添的内容,考纲要求比较简单,所 以在考试中一般不会有很难的题目。 三、知识点回顾 坐标系 的作用下,点P (x, y )对应到点P (X , y ),称「为平面直角坐标系中的坐标伸缩.变换,简 称伸缩变换? 2.极坐标系的概念: 在平面内取一个定点 0,叫做极点;自极点0引一条射线Ox 叫做极 轴;再选定一个长度单位、 一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这 样就建立了一个极坐标系。 3?点M 的极坐标:设M 是平面内一点,极点 0与点M 的距离|0M |叫做点M 的极径, 记为「;以极轴Ox 为始边,射线 0M 为终边的? xOM 叫做点M 的极角,记为二。有序 数对(OR 叫做点 M 的极坐标,记为M (几旳. 极坐标(几力与(亍门,2k 二)(k ?Z )表示同一个点。极点 0的坐标为(0门)(” R ). 4.若? ::: 0,则- ? 0,规定点(-匚力与点(:「)关于极点对称,即(-6力与(匚二 二) 表示同一点。 如果规定「7,0 V 2二,那么除极点外,平面内的点可用唯一的极坐标 (「门)表 示; 、题型分布: 1 .伸缩变换:设点P (x, y )是平面直角坐标系中的任意一点, 在变换申:丿 X 「X, ( ■ 0),
(完整版)坐标系与参数方程知识点
坐标系与参数方程 知识点 1.平面直角坐标系中的坐标伸缩变换 设点P(x,y)是平面直角坐标系中的任意一点,在变换(0):(0) x x y y λλ?μμ'=>?? '=>?g g 的作用 下,点P(x,y)对应到点(,)P x y ''',称?为平面直角坐标系中的坐标伸缩变换,简称伸缩变换. 2.极坐标系的概念 (1)极坐标系 如图所示 ,在平面内取一个定点O ,叫做极点,自极点O 引一条射 线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系. 注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系. (2)极坐标 设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ. 一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个 点的极坐标有无数种表示. 如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标(,)ρθ表示的点也是唯一确定的. 3.极坐标和直角坐标的互化
(1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示 : (2)互化公式:设M 是坐标平面内任意一点,它的直角坐标是(,)x y ,极坐标是 (,)ρθ(0ρ≥),于是极坐标与直角坐标的互化公式如表: 点M 直角坐标(,)x y 极坐标(,)ρθ 互化公式 cos sin x y ρθ ρθ=?? =? 222 tan (0)x y y x x ρθ=+= ≠ 在一般情况下,由tan θ确定角时,可根据点M 所在的象限最小正角. 4.常见曲线的极坐标方程 曲线 图形 极坐标方程 圆心在极点,半径为r 的圆 (02)r ρθπ=≤< 圆心为(,0)r ,半径为r 的圆 2cos ()2 2 r π π ρθθ=- ≤< 圆心为(, )2 r π ,半 径为r 的圆 2sin (0)r ρθθπ≤<
参数方程和极坐标方程知识点归纳
参数方程和极坐标方程知 识点归纳 Prepared on 24 November 2020
专题九:坐标系与参数方程 1、平面直角坐标系中的伸缩变换 设点),(y x P 是平面直角坐标系中的任意一点,在变换?? ?>?='>?='). 0(,y y 0), (x,x :μμλλ?的作用下,点),(y x P 对应到点),(y x P ''',称?为平面直角坐标系中的坐标伸缩变换,简称伸缩变换。 2、极坐标系的概念 O ,叫做极点;自极点O 引一条射线Ox 叫做极轴;再选定一个长度单位、一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系。 点M 设M 是平面内一点,极点O 与点M 的距离||OM 叫做点 M 的ρ;以极轴Ox 为始边,射线OM 为终边的xOM ∠叫做点M 的极角),(θρ叫做点M 的极坐标,记为),(θρM . 注: 极坐标),(θρ与)Z )(2,(∈+k k πθρ表示同一个点。极点O 的坐标为)R )(,0 (∈θθ. 若0<ρ,则0>-ρ,规定点),(θρ-与点),(θρ关于极点对称,即),(θ ρ-与),(θπρ+表示同一点。 如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标),(θρ表示(即一一对应的关系);同时,极坐标),(θ ρ表示的点也是唯一确定的。 极坐标与直角坐标都是一对有序实数确定平面上一个点,在极坐标系下,一对有序实数ρ、θ对应惟一点P (ρ,θ),但平面内任一个点P 的极坐标不惟一.一个点可以有无数个坐标,这些坐标又有规律可循的,P (ρ,θ) (极点除外)的全部坐标为(ρ,θ+πk 2)或(ρ-,θ+π)12(+k ),(∈k Z ).极点的极径为0,而极角任意取.若对ρ、θ的取值范围加以限制.则除极点外,平面上点的极坐标就惟一了,如限定 ρ>0,0≤θ<π2或ρ<0,π-<θ≤π等. 极坐标与直角坐标的不同是,直角坐标系中,点与坐标是一一对应的,而极坐标系中,点与坐标是一多对应的.即一个点的极坐标是不惟一的. 3、极坐标与直角坐标的互化 (,)x y ,极坐标是(,)ρθ,从图中可以得出: 4、简单曲线的极坐标方程 ⑴圆的极坐标方程 ①以极点为圆心,a 为半径的圆的极坐标方程是 a ρ=;(如图1) ②以(,0)a )0(>a 为圆心, a 为半径的圆的极坐标方程是 θρcos 2a =;(如图2) y O H O 图1 M (,)ρθ θ ρcos 2a =θ ρsin 2a =图4 θ ρsin 2a -=图5 θ ρcos 2a -=a =ρ图1 ) cos(2?θρ-=a 图6
职高高二数学教案坐标变换与参数方程(供参考)
第二十二课时:坐标轴的平移(一) 【教学目标】 知识目标: (1)理解坐标轴平移的坐标变换公式; (2)掌握点在新坐标系中的坐标和在原坐标系中的坐标的计算; 能力目标: 通过对坐标轴平移的坐标变换公式的学习,使学生的计算技能与计算工具使用技能得到锻炼和提高. 【教学重点】 坐标轴平移中,点的新坐标系坐标和原坐标系坐标的计算. 【教学难点】 坐标轴平移的坐标变换公式的运用. 【教学设计】 学生曾经学习过平移图形.平移坐标轴和平移图形是两种相关的变化方式,从平移的运动过程上看,平移坐标轴和平移图形是两种相反的过程.向左平移图形的效果相当于将坐标轴向右平移相同的单位;向上平移图形的效果相当于将坐标轴向下平移相同单位.要强调坐标轴平移只改变坐标原点的位置,而不改变坐标轴的方向和单位长度.坐标轴平移的坐标变换公式,教材中是利用向量来进行推证的,教学时要首先复习向量的相关知识.例1是利用坐标轴平移的坐标变换公式求点的新坐标系坐标的知识巩固性题目,教学中要强调公式中各量的位置,可以根据学生情况,适当补充求点在原坐标系中坐标的题目.例2是利用坐标轴平移的坐标变换公式化简曲线方程的知识巩固性题目.教学中要强调新坐标系原点设置的原因,让学生理解为什么要配方. 【课时安排】 1课时. 【教学过程】 揭示课题 2.1坐标轴的平移与旋转 创设情境 兴趣导入 在数控编程和机械加工中,经常出现工件只作旋转运动(主运动),而刀具发生与工件相对的进给运动.为了保证切削加工的顺利进行,经常需要变换坐标系. 例如,圆心在O 1(2,1),半径为1的圆的方程为 1)1()2(22=-+-y x .
对应图形如图2-1所示.如果不改变坐标轴的方向和单位长度,将坐标原点移至点1O 处,那么,对于新坐标系111x O y ,该圆的方程就是 12121=+y x . 图2-1 动脑思考 探索新知 只改变坐标原点的位置,而不改变坐标轴的方向和单位长度的坐标系的变换,叫做坐标轴的平移. 下面研究坐标轴平移前后,同一个点在两个坐标系中的坐标之间的关系,反映这种关系的式子叫做坐标变换公式. 图2-2 如图2-2所示,把原坐标系xOy 平移至新坐标系111x O y ,1O 在原坐标系中的坐标为),(00y x .设原坐标系xOy 两个坐标轴的单位向量分别为i 和j ,则新坐标系111x O y 的单位向量也分别为i 和j ,设点P 在原坐标系中的坐标为),(y x ,在新坐标系中的坐标为),(11y x ,于是有 OP =x i +y j ,1O P =x 1i +y 1 j , 1OO =x 0i +y o j , 因为 11OP OO O P =+, 所以 0011 x y x y x y +=+++i j i j i j , 即 0101 )()x y x x y y +=+++i j i j (.(转下节) 第二十三课时:坐标轴的平移(二) 【教学目标】 知识目标: (1)理解坐标轴平移的坐标变换公式; (2会利用坐标轴平移化简曲线方程. (3)掌握点在新坐标系中的坐标和在原坐标系中的坐标的计算; 能力目标: 通过对坐标轴平移的坐标变换公式的学习,使学生的计算技能与计算工具使用技能得到锻炼和提高. 【教学重点】 坐标轴平移中,点的新坐标系坐标和原坐标系坐标的计算. 【教学难点】
专题复习之坐标系与参数方程
专题复习之极坐标系与参数方程 一、知识精讲 (一)、极坐标 知识点一、平面直角坐标系中的坐标伸缩变换 设点P(x,y)是平面直角坐标系中的任意一点,在变换(0) :(0) x x y y λλ?μμ'=>?? '=>? 的作用下,点P(x,y)对 应到点(,)P x y ''',称?为平面直角坐标系中的坐标伸缩变换,简称伸缩变换. 知识点二、极坐标系的概念 (1)极坐标系 如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系. 注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系. (2)极坐标 设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ. 一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示. 如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标 (,)ρθ表示的点也是唯一确定的. 知识点三、极坐标和直角坐标的互化 (1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示 :
(完整版)极坐标与参数方程专题复习
坐标系与参数方程 一、考试大纲解析: 1.坐标系 (1)理解坐标系的作用; (2)了解平面坐标系伸缩变换作用下图形的变化情况; (3)能在坐标系中用极坐标表示点的位置,理解在极坐标和平面之间坐标系表示点的位置的区别,能进行极坐标和直角坐标的互化; (4)能在极坐标系中给出简单图形的方程,通过比较这些图形在极坐标和直角坐标系中的方程,理解用方程表示平面图形时选择适当坐标系的意义; 2.参数方程 (1)了解参数方程和参数方程的意义; (2)能选择适当的参数写出直线、圆、圆锥曲线的参数方程; (3)能用参数方程解决一些数学问题和实际的运用; 二、题型分布: 极坐标和参数方程是新课标考纲里的选考内容之一,在每年的高考试卷中,极坐标和参数方程都是放在选作题的一题中来考查。由于极坐标是新添的内容,考纲要求比较简单,所以在考试中一般不会有很难的题目。 三、知识点回顾 坐标系 1.伸缩变换:设点),(y x P 是平面直角坐标系中的任意一点,在变换?? ?>?='>?='). 0(,y y 0), (x,x :μμλλ?的作用下,点),(y x P 对应到点),(y x P ''',称?为平面直角坐标系中的坐标伸缩变换,简 称伸缩变换。 2.极坐标系的概念:在平面内取一个定点O ,叫做极点;自极点O 引一条射线Ox 叫做极轴;再选定一个长度单位、一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系。 3.点M 的极坐标:设M 是平面内一点,极点O 与点M 的距离||OM 叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的xOM ∠叫做点M 的极角,记为θ。有序数对),(θρ叫做点M 的极坐标,记为),(θρM . 极坐标),(θρ与)Z )(2,(∈+k k πθρ表示同一个点。极点O 的坐标为)R )(,0(∈θθ. 4.若0<ρ,则0>-ρ,规定点),(θρ-与点),(θρ关于极点对称,即),(θρ-与),(θπρ+表示同一点。 如果规定πθρ20,0≤≤>,那么除极点外,平面内的点可用唯一的极坐标),(θρ表示;同时,极坐标),(θρ表示的点也是唯一确定的。
高二数学 求曲线的方程
课题:求曲线的方程 教学目标:(1)能叙述求曲线方程的一般步骤,并能根据所给条件,选择适当的坐标系,求出曲线的方程。 (2)在问题解决过程中,培养学生发散性思维和转化、归 纳、数形结合等数学思想方法,提高分析、解决问题能力。 (3)在问题解决过程中,培养学生积极探索和团结协作的 科学精神。 教学重点:求曲线方程的基本方法和步骤。 教学难点:由已知条件求曲线的方程。 教学方法:启发式。 教学手段:运用多媒体技术和实物投影仪。 教学过程: 举出实例(放录象剪辑): (1)鸟类迁徙 (2)鱼群洄游 (3)行星运动 (4)卫星发射 (5)导弹攻击 (6)台风移动 思考:(1)这些现象有何共同之处? (2)是否有必要研究这些现象?(揭示研究物体运动轨迹的 意义。) 揭示课题:求曲线的方程 引例:在南沙群岛中,甲岛与乙岛相距8海里,一艘军舰在海面上巡逻。巡逻过程中,从军舰上看甲、乙两岛,保持视角为直角。你能否为军舰巡逻的路线写一个方程? 分析:如果把甲、乙两岛和军舰看成三个点的话,甲、乙两岛是两个定点,而军舰则是一个动点。动点的运动具有一定的规律。 猜测: 军舰巡逻的路线是什么轨迹? (电脑演示军舰巡逻的动画效果。) 问题:如何利用动点运动的规律求出其运动轨迹方程?(引而不发) 例1.设A、B两点的坐标是(-1,-1)、(3,7),求线段AB的垂直平分线的方程。 (先请学生利用所学知识求直线方程。) 思考:(1)如果把这条垂直平分线看成是动点运动的轨迹,那么,这条垂直平分线上任意一点应该满足怎样的几何条件?
(2)几何条件能否转化为代数方程? 用什么方法进行转 化? (3)用新方法求得的直线方程,是否符合要求?为什么? (提示:方程与曲线构成对应关系,必须满足什么条件?) (学生回答时,教师边规范语言表达边板书。) 解题反思:你能否归纳一下求曲线方程的一般步骤? (1)设点----用(x,y)表示曲线上的任意一点M的坐标; (2)寻找条件----写出适合条件P的点M的集合P={ M |p(M)}; (3)列出方程----用坐标表示条件p(M),列出方程f(x,y)=0; (4)化简----化方程f(x,y)=0为最简形式; (5)证明----证明以化简后的方程的解为坐标的点都是曲线上的点。 例2.已知点C到直线L的距离为4,若动点P到点C和直线L 的距离相等,求动点P的轨迹方程。 思考:(1)与例1相比,有什么显著的不同点? (2) 你准备如何建立坐标系? 为什么? (3) 比较所求轨迹方程是否有区别? 从中得到什么体会? (根据思考题,在独立思考、相互交流讨论的基础上,教师 适时点拨,学生自主解决。) 解题反思: (1) 没有确定的坐标系时,要求方程首先必须建立坐标 系; (2) 坐标系选取得适当,可以使运算简单,所得到的方程 也较简单; (3) 同一条曲线,在不同的坐标系中一般会有不同的方 程。 根据例2的求解过程,请学生对求曲线方程的一般步骤进行充实: (1)改为:“建系设点----建立适当的直角坐标系, 用(x,y)表示 曲线上的任意一点M的坐标;” 阅读教材:第52—53页。
坐标系与参数方程_知识点
坐标系与参数方程 知识点 1.平面直角坐标系中的坐标伸缩变换 设点P(x,y)是平面直角坐标系中的任意一点,在变换(0) :(0) x x y y λλ?μμ'=?>?? '=?>?的作用下,点P(x,y)对 应到点(,)P x y ''',称?为平面直角坐标系中的坐标伸缩变换,简称伸缩变换. 2.极坐标系的概念 (1)极坐标系 如图所示,在平面内取一个定点O ,叫做极点,自极点O 引一条射线Ox ,叫做极轴;再选定一个长度单位,一个角度单位(通常取弧度)及其正方向(通常取逆时针方向),这样就建立了一个极坐标系. 注:极坐标系以角这一平面图形为几何背景,而平面直角坐标系以互相垂直的两条数轴为几何背景;平面直角坐标系内的点与坐标能建立一一对应的关系,而极坐标系则不可.但极坐标系和平面直角坐标系都是平面坐标系. (2)极坐标 设M 是平面内一点,极点O 与点M 的距离|OM|叫做点M 的极径,记为ρ;以极轴Ox 为始边,射线OM 为终边的角xOM ∠叫做点M 的极角,记为θ.有序数对(,)ρθ叫做点M 的极坐标,记作(,)M ρθ. 一般地,不作特殊说明时,我们认为0,ρ≥θ可取任意实数. 特别地,当点M 在极点时,它的极坐标为(0, θ)(θ∈R).和直角坐标不同,平面内一个点的极坐标有无数种表示. 如果规定0,02ρθπ>≤<,那么除极点外,平面内的点可用唯一的极坐标(,)ρθ表示;同时,极坐标 (,)ρθ表示的点也是唯一确定的. 3.极坐标和直角坐标的互化 (1)互化背景:把直角坐标系的原点作为极点,x 轴的正半轴作为极轴,并在两种坐标系中取相同的长度单位,如图所示: