PS2游戏机手柄资料
最近在开发一款PS2游戏机产品,学到了很多东西,也遇到很多问题,在这里把自己认为重要的东西记下来,作为以后的备忘,如果你在这篇文章中学到哪怕一点点东西,我都将会感到很荣幸。
关于PS2游戏机更详细的文章,应该算是Adam Chapweske著Roy Show译的“PS2技术参考”,其实开发一款PS2产品,兼容性是很重要的,在我们开发的这款PS产品中就出现过这样的问题,我们测试了几十台PC都是没问题的,可是偏偏就在一台HP的PC上不能识别,找了很久才发现问题所在。
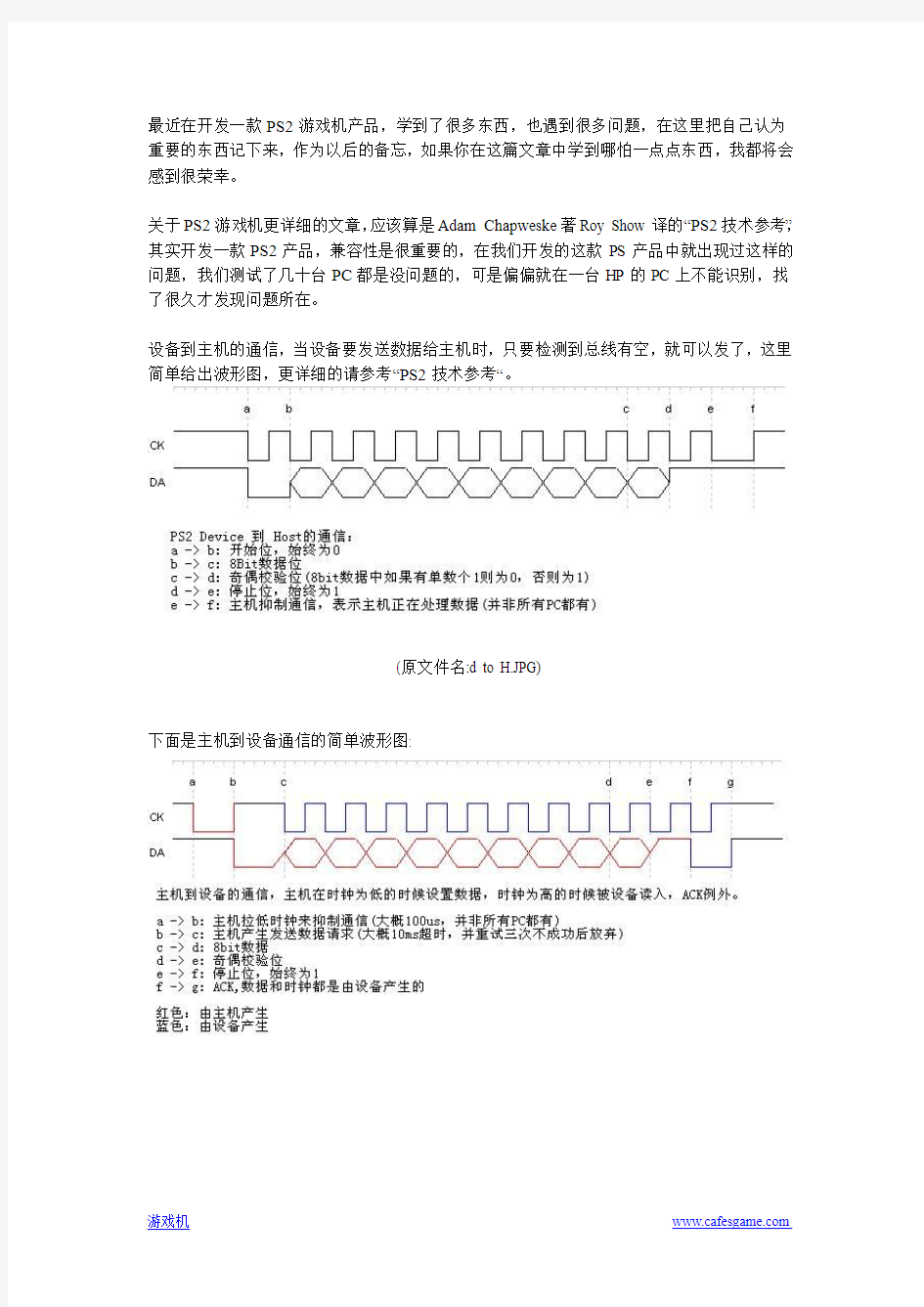
设备到主机的通信,当设备要发送数据给主机时,只要检测到总线有空,就可以发了,这里简单给出波形图,更详细的请参考“PS2技术参考“。
(原文件名:d to H.JPG)
下面是主机到设备通信的简单波形图:
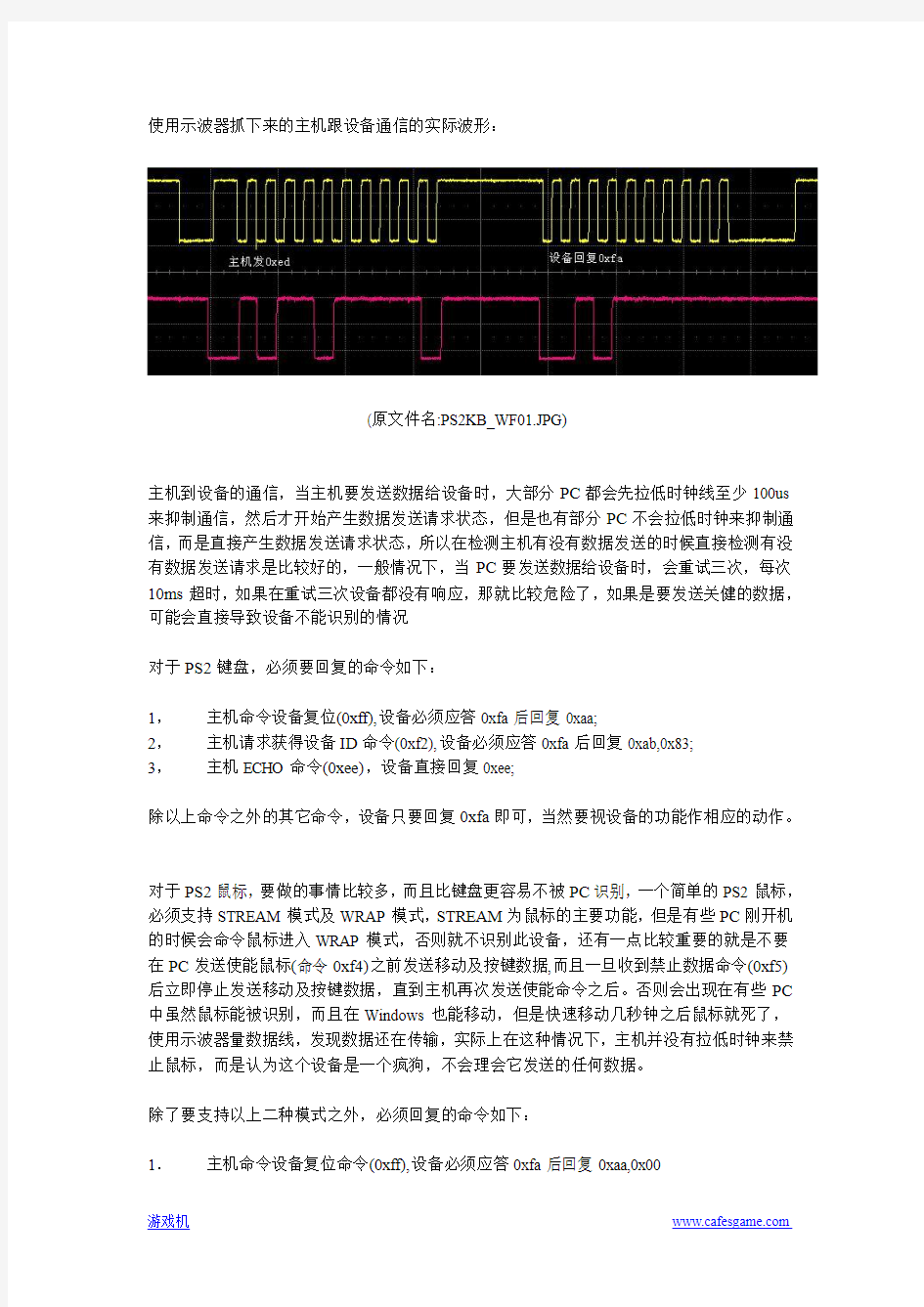
使用示波器抓下来的主机跟设备通信的实际波形:
(原文件名:PS2KB_WF01.JPG)
主机到设备的通信,当主机要发送数据给设备时,大部分PC都会先拉低时钟线至少100us 来抑制通信,然后才开始产生数据发送请求状态,但是也有部分PC不会拉低时钟来抑制通信,而是直接产生数据发送请求状态,所以在检测主机有没有数据发送的时候直接检测有没有数据发送请求是比较好的,一般情况下,当PC要发送数据给设备时,会重试三次,每次10ms超时,如果在重试三次设备都没有响应,那就比较危险了,如果是要发送关健的数据,可能会直接导致设备不能识别的情况
对于PS2键盘,必须要回复的命令如下:
1,主机命令设备复位(0xff),设备必须应答0xfa后回复0xaa;
2,主机请求获得设备ID命令(0xf2),设备必须应答0xfa后回复0xab,0x83;
3,主机ECHO命令(0xee),设备直接回复0xee;
除以上命令之外的其它命令,设备只要回复0xfa即可,当然要视设备的功能作相应的动作。
对于PS2鼠标,要做的事情比较多,而且比键盘更容易不被PC识别,一个简单的PS2鼠标,必须支持STREAM模式及WRAP模式,STREAM为鼠标的主要功能,但是有些PC刚开机的时候会命令鼠标进入WRAP模式,否则就不识别此设备,还有一点比较重要的就是不要在PC发送使能鼠标(命令0xf4)之前发送移动及按键数据,而且一旦收到禁止数据命令(0xf5)后立即停止发送移动及按键数据,直到主机再次发送使能命令之后。否则会出现在有些PC 中虽然鼠标能被识别,而且在Windows也能移动,但是快速移动几秒钟之后鼠标就死了,使用示波器量数据线,发现数据还在传输,实际上在这种情况下,主机并没有拉低时钟来禁止鼠标,而是认为这个设备是一个疯狗,不会理会它发送的任何数据。
除了要支持以上二种模式之外,必须回复的命令如下:
1.主机命令设备复位命令(0xff),设备必须应答0xfa后回复0xaa,0x00
2.主机请求获得设备ID命令(0xf2),设备必须应答0xfa后回复ID:0x03(适用于标准的3D鼠标);
3.主机请求状态命令(0xe8),设备回复:0xfa,0x00,0x02,0x64;
PS鼠标使用如下的坐标系,这跟USB鼠标使用的坐标系是不同的:
(原文件名:坐标.JPG)
不管是键盘还是鼠标,在整个Windows启动的过程中会被检测二次,第一次是BIOS检测,第二次是Windows检测,如果第一次未通过,则第二次不会再检测,而且二次检测都必须通过再能使用,有趣的是有些PC在BIOS检测之后,Windows启动之前再插入键盘,还是可以使用的,但是Windows启动之后就会拉低时钟来禁止设备,
附件是实际的波形及部份代码
PS2实际波形ourdev_546437.rar(文件大小:65K) (原文件名:PS2 Waveform.rar)
PS2键盘鼠标例程ourdev_546438.rar(文件大小:4K) (原文件名:PS2KM_CODE.rar)
PS.C
1.#include
2.#include
3.#include
4.#define uchar unsigned char
5.#define uint unsigned int
6.
7.uchar code dout[5]={0x01,0x42,0x00,0x00,0x00};
8.uchar data din[5]={0x00,0x00,0x00,0x00,0x00};
9.uint code hos_tabup[16]={0xE31B,0xF800,0xF50D,0xFF07,0xDE26,0x0000,0x0000,0x
DF27, //主手柄释放键表
10. 0x877F,0xB941,0xBA42,0x8870,0xDC24,0xA159,0xD820,0xA058};
11.uint code hos_tabdn[16]={0x639B,0x7880,0x758D,0x7F87,0x5EA6,0x0000,0x0000,0x
5FA7, //主手柄按键表
12. 0x07FF,0x39C1,0x3AC2,0x08F0,0x5CA4,0x21D9,0x58A0,0x20D8};
13./*uint code hos_tabup[16]={0x0000,0x8870,0x877F,0x0000,0xDE26,0x0000,0x0000,0x
DF27, //主手柄释放键表
14. 0xF50D,0xFF07,0xE31B,0xF800,0xDC24,0xA159,0xD820,0xA058};
15.uint code hos_tabdn[16]={0x0000,0x08F0,0x07FF,0x0000,0x5EA6,0x0000,0x0000,0x5
FA7, //主手柄按键表
16. 0x758D,0x7F87,0x639B,0x7880,0x5CA4,0x21D9,0x58A0,0x20D8};
*/
17.uint code gue_tabup[16]={ 0x9961,0x9A62,0x9B63,0x8B73,0x0000,0x0000,0x0000,0x
0000, //副手柄释放键表
18. 0xB149,0xA35B,0xFC04,0xF901,0x0000,0x0000,0x0000,0x0000};
19.uint code gue_tabdn[16]={ 0x19E1,0x1AE2,0x1BE3,0x0BF3,0x0000,0x0000,0x0000,0
x0000, //副手柄按键表
20. 0x31C9,0x23DB,0x7C84,0x7981,0x0000,0x0000,0x0000,0x0000};
21.//unsigned long endcode=0x0005AA8A; //结束码的红外发
射码,
22.uint KEY_hos[2]={0xFFFF,0xFFFF}; //主游戏手柄扫描
值,
23.uint KEY_gue[2]={0xFFFF,0xFFFF}; //副游戏手柄扫描
值,
24.uint ir_key; //标准红外码缓冲,
25.uint chan_key; //手柄按键有变化的位,
26.uint stat_key; //当前手柄的状态值,
27.
28.unsigned long ref;
29.unsigned long idata irbuf[32]; //红外输出缓冲区,
30.unsigned long *p_t; //指向红外缓冲区的两个指针,
31.unsigned long *p_b;
32.bit bdata Buf_emp=1; //红外输出缓冲区空标
志,
33.bit bdata Bit_F=0; //红外输出的移位标志,
34.bit bdata Buf_ful=0; //红外输出缓冲区满标志
35.bit bdata Saf_F=0; //安全间隔标志位
36.bit bdata Host_F=0;
37.
38.sbit ACK1 =P1^2;
39.sbit ACK2 =P1^3;
40.sbit DI1 =P0^3;
41.sbit DI2 =P1^6;
42.sbit DO1 =P0^0;
43.sbit DO2 =P0^4;
44.sbit CLK1 =P0^2;
45.sbit CLK2 =P0^7;
46.sbit SEN1 =P0^1;
47.sbit SEN2 =P1^7;
48.sbit PWM =P0^5;
49.sbit IR_OUT=P0^6;
50.
51.
52.void delay(uchar n);
53.void Isp_Init(); //初始化串口,
54.//void keysignout(void) ;
55.void Getkey_hos(void);
56.void Getkey_gue(void);
57.void Trans(void); //手柄键码转化为红外输出码,
58.
59.main()
60.{
61.
62. P0M1=0XDF; //外部引脚I/O配置,
63. P0M2=0XF7;
64. P1M1=0XFF;
65. P1M2=0X83;
66. DIVM=0; //时钟分频设置,
67.// AUXR1=AUXR1|0x80;
68. TH0=238;
69. TL0=212;
70. TMOD=0X01; //记数器0设置,
71. PWM=0;
72. IR_OUT=1;
73. TCON=0x14; //设置下降沿中断,
74. IEN0=0x06; //开外部中断一 ,定时器零,
75. EA=1;
76. Isp_Init(); //初始化串口,
77.
78. p_t=&irbuf[0];
79. p_b=&irbuf[0];
80.
81.
82.
83. while(1)
84. {
85. Getkey_hos();
86. chan_key=KEY_hos[0]^KEY_hos[1];
87. if(chan_key)
88. {
89. Host_F=1;
90. stat_key=KEY_hos[0];
92. KEY_hos[1]=KEY_hos[0];
93. }
94. Getkey_gue();
95. chan_key=KEY_gue[0]^KEY_gue[1];
96. if(chan_key)
97. {
98. Host_F=0;
99. stat_key=KEY_gue[0];
100. Trans();
101. KEY_gue[1]=KEY_gue[0];
102. }
103. }
104.
105.}
106.
107.void irout() interrupt 2 using 2 //使用外部中断1中断服务程序 ,
108.{
109. EA=0;
110. IR_OUT=PWM;
111. PWM=!PWM;
112. EA=1;
113.}
114.
115.void delay( uchar n) //n*12us延时程序;
116.{
117. uchar i, j;
118. for(i=0;i
120. CLK2=0;
121. if(ref&dout[p]) //输出一位控制数据?是否满足4us
122. DO2=1;
123. else
124. DO2=0;
125. for(i=0;i<3;i++) //大概2us的延迟,
126. _nop_();
127. CLK2=1;
128. if(DI2)
129. din[p]=ref|din[p]; //输入一位控制数据?是否满足4us
130. for(i=0;i<2;i++) //大概2us的延迟,
131. _nop_();
132. }
133. DO2=1;
135. {
136.
137.// delay(1);
138.// do
139.// {
140.// while(ACK2) //检测ACK信号是否响应。有响应则向下执行。141.// {
142. _nop_();
143.// ACK=1;
144.// timeout=10000;
145.// break;
146.// }
147. delay(2);
148.// }
149.// while(timeout--);
150. }
151.// else
152.// {}
153.
154. }
155. SEN2=1;
156.// delay(2);
157.// keysignout(); // 键码值通过串口输出。
158. KEY_hos[0]=din[3];
159. KEY_hos[0]<<=8;
160. KEY_hos[0]+=din[4];
161. for(i=0;i<5;i++)
162. din[i]=0x00;
163.// for(i=0;i<255;i++)
164.// delay(255);
165.
166.}
167.
168.void Getkey_gue() //get gamekdy
169.{
170. uchar p,i,ref;
171.
172. SEN1=0;
173. delay(4);
174. for(p=0;p<5;p++)
175. {
176. for(ref=0x01;ref>0x00;ref<<=1)
177. {
179. if(ref&dout[p]) //输出一位控制数据?是否满足4us
180. DO1=1;
181. else
182. DO1=0;
183. for(i=0;i<3;i++) //大概2us的延迟,
184. _nop_();
185. CLK1=1;
186. if(DI1)
187. din[p]=ref|din[p]; //输入一位控制数据?是否满足4us
188. for(i=0;i<2;i++) //大概2us的延迟,
189. _nop_();
190. }
191. DO1=1;
192. if(p<4)
193. {
194.
195.// delay(1);
196.// do
197.// {
198.// while(ACK2) //检测ACK信号是否响应。有响应则向下执行。199.// {
200. _nop_();
201.// ACK=1;
202.// timeout=10000;
203.// break;
204.// }
205. delay(2);
206.// }
207.// while(timeout--);
208. }
209.// else
210.// {}
211.
212. }
213. SEN1=1;
214.// delay(2);
215.// keysignout(); // 键码值通过串口输出。
216. KEY_gue[0]=(din[3]|0x0F);
217. KEY_gue[0]<<=8;
218. KEY_gue[0]+=(din[4]|0x0F);
219. for(i=0;i<5;i++)
220. din[i]=0x00;
221.// for(i=0;i<255;i++)
222.// delay(255);
223.
224.}
225.void Isp_Init() //初始化串口,
226.{
227. SSTA T=0xFA;
228. BRGCON=0x00;
229. AUXR1=0x40;
230. SCON=0x50;
231. BRGR1=0x90;
232. BRGR0=0x00;
233. BRGCON=0x03;
234.}
235.
236.void t0() interrupt 1 using 2 //使用定时器0中断服务程序 , 237.{
238./* if(Buf_emp==0)
239. TxD=0;
240. else
241. TxD=1; */
242. if(Saf_F) //安全间隔时间定时,
243. {
244. Saf_F=0;
245. IR_OUT=1;
246. TH0=39;
247. TL0=200;
248. TR0=1;
249. }
250. else
251. {
252. if(Buf_emp==0)
253. {
254. TH0=255; //定时45us
255. TL0=6;
256. if(Bit_F==0)
257. {
258. Bit_F=1;
259. ref=0x00000001;
260. }
261. if(*p_b&ref) //输出一位红外数据,
262. IR_OUT=0;
263. else
264. IR_OUT=1;
265. TR0=1;
266. ref<<=1;
267. if(ref>0x00080000) //判断一个红外码字是否发完,
268. {
269. Bit_F=0;
270. Buf_ful=0;
271. if(p_b==&irbuf[31])
272. p_b=&irbuf[0];
273. else
274. p_b++;
275. if(p_b==p_t)
276. Buf_emp=1;
277. Saf_F=1; //置保护时间标志,
278.
279. }
280. }
281. else
282. {
283. TH0=255; //这个时间能否再减小?
284. TL0=6;
285. TR0=1;
286. IR_OUT=!PWM;
287. }
288. }
289.}
290.
291. void Trans() //手柄键码值转换为红外输出码值,292.{
293. uchar i;
294. uint ref; //一次扫描手柄后出现变化的键,295. // if(KEY[0]==KEY[1])
296. // return;
297. // else
298. if(Buf_ful==0)
299. {
300.
301. for(i=0,ref=0x8000;i<16;i++,ref>>=1)
302. {
303. if(chan_key&ref)
304. {
305. if(stat_key&ref) //为真检测到释放键
306. {
307. if(Host_F) //释放键为主手柄的释放键
308. ir_key=hos_tabup[i];
309. else //释放键为副手柄的释放键
310. ir_key=gue_tabup[i]; //释放键进入红外寄存器
311. *p_t=ir_key&0x00FF;
312. *p_t<<=12;
313. *p_t+=(((ir_key&0xFF00)>>6)|0x0802);
314.
315./* if(p_t==&irbuf[31])
316. p_t=&irbuf[0];
317. else
318. p_t++;
319. Buf_emp=0; //红外输出缓冲区有数据,
320. if(p_t==p_b)
321. {
322. Buf_ful=1; //红外输出缓冲区满,
323. while(1) //测试缓冲区是否会满,
324. {
325. DO1=1;
326. delay(5);
327. DO1=0;
328. delay(5);
329. }
330. return;
331. }
332.
333. *p_t=0x0005AA8A; //结束键进缓冲区, */
334. }
335. else //检测到按下键,
336. {
337. if(Host_F) //按下键为主手柄的按下键,
338. ir_key=hos_tabdn[i];
339. else //按下键为副手柄的按下键,
340. ir_key=gue_tabdn[i];
341. *p_t=ir_key&0x00FF;
342. *p_t<<=12;
343. *p_t+=(((ir_key&0xFF00)>>6)|0x0802); //标准红外码转换为添加过引导码的发送红外码,
344. }
345. if(p_t==&irbuf[31])
346. p_t=&irbuf[0];
347. else
348. p_t++;
349. Buf_emp=0; //红外输出缓冲区有数据,
350. if(p_t==p_b)
351. {
352. Buf_ful=1; //红外输出缓冲区满,
353.// while(1) //测试缓冲区是否会满,
354.// {
355. TxD=0;
356.// }
357. return;
358. }
359.
360. }
361.
362. }
363. }
364.
365.}
/***********************************
说明:
以下程序是用spi去读取当某按键按下后,ps2手柄发出的信号(data线)comd线是程序(即主机)向手柄发出的控制信号
clk是硬件运行时钟(频率有具体要求)
att是控制线(有使能的意思)
这里没有用到ack,不需要
另外是vcc(幅值有要求),和gnd,电源提供。
程序要做的就是模拟时序,发出控制信号,读取信号。就这么简单。
***************************************/
//====================================
int HandKey = 0x00;
//Not Used Now
//int HandRunFlag = 0;
//int HandKey2 = 0x00;
//int HandKey3 = 0x00;
int Comd[9] = {0x01,0x42,0xff,0xff,0xff,0xff,0xff,0xff,0xff};
int Data[9] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
void InitPS2(void) //手柄PS2通信初始化
{
EALLOW;
GpioMuxRegs.GPAMUX.bit.TDIRA_GPIOA11 = 0; //GPIO A11 :DA TE signal GpioMuxRegs.GPAMUX.bit.TCLKINA_GPIOA12 = 0; //GPIO A12 :COMD signal
GpioMuxRegs.GPEMUX.bit.XINT2_ADCSOC_GPIOE1 = 0; //GPIO E1 :CLK signal
GpioMuxRegs.GPEMUX.bit.XNMI_XINT13_GPIOE2 = 0; //GPIO E2 :A TT signal
GpioMuxRegs.GPADIR.bit.GPIOA11 = 0; //IN mode DA TA
GpioMuxRegs.GPADIR.bit.GPIOA12 = 1; //OUT mode COMD
GpioMuxRegs.GPEDIR.bit.GPIOE1 = 1; //OUT mode CLK
GpioMuxRegs.GPEDIR.bit.GPIOE2 = 1; //OUT mode A TT
EDIS;
GpioDataRegs.GPADA T.bit.GPIOA12 = 1; //初始状态均为高电平
GpioDataRegs.GPEDA T.bit.GPIOE1 = 1;
GpioDataRegs.GPEDA T.bit.GPIOE2 = 1;
}
void ReadHand(void) //读手柄按键
{
volatile int byte = 0;
volatile int pointer = 0;
volatile int ref = 0;
GpioDataRegs.GPEDA T.bit.GPIOE2 = 0; //A TT拉低
Delay(5);
for(byte=0; byte<9; byte++)
{
for(ref=0x01; ref<0x0100; ref<<=1)
{
GpioDataRegs.GPEDA T.bit.GPIOE1 = 0;//时钟拉低
if(ref & Comd[byte])
{
GpioDataRegs.GPADA T.bit.GPIOA12 = 1; //输出一位控制位}
else
{
GpioDataRegs.GPADA T.bit.GPIOA12 = 0;
}
Delay(15);
GpioDataRegs.GPEDA T.bit.GPIOE1 = 1; //时钟拉高
Delay(15);
if(GpioDataRegs.GPADA T.bit.GPIOA11)
{
Data[byte]=ref | Data[byte];
}
}
Delay(50);
}
GpioDataRegs.GPEDA T.bit.GPIOE2 = 1; //拉高A TT
HandKey = Data[3];
HandKey = HandKey <<8;
HandKey = HandKey + Data[4];
// HandKey2=Data[5];
// HandKey2=HandKey2<<8;
// HandKey2=HandKey2+Data[6];
// HandKey3=Data[7];
// HandKey3=HandKey3<<8;
// HandKey3=HandKey3+Data[8];
for(pointer=0;pointer<9;pointer++)
{
Data[pointer]=0x00;
}
if(HandKey==0xffff)
{
HandKeyFlag=0;
}
else
{
HandKeyFlag=1;
}
}
索尼PS手柄原理分析与制作目录
?Playstation 手柄针脚输出
?PS手柄信号
?PS手柄数据
?用74XX逻辑电路仿真PS手柄
?用微处理器仿真PS手柄
PS手柄针脚输出
面对插头
-------------------------------
PIN 1->| o o o | o o o | o o o |
\_____________________________/
针脚# 作用
1.DA TA
https://www.360docs.net/doc/3c8391048.html,MAND
3.N/C (9 V olts unused)
4.GND
5.VCC
6.A TT
7.CLOCK
8.N/C
9.ACK
DA TA
信号流向从手柄到主机。
此信号是一个8 bit的串行数据,同步传送于时钟下降沿(输入输出信号在时钟信号由高到低时变化,所有信号的读取在时钟前沿到电平变化之前完成。) COMMAND
信号流向从主机到手柄。
此信号和DA TA相对,同样是一个8 bit的串行数据,同步传送于时钟下降沿。VCC
电源电压从5V到3V原装的索尼手柄都可以工作。
主机主板上装有表面安装的750mA保险丝,用于防止外设过载(750mA是包括左右手柄和记忆卡)。
A TT
A TT 用于提供手柄触发信号。
信号在通信期间处于低电平。又有人将此针脚叫做Select, DTR 和Command。CLOCK
信号流向从主机到手柄。
用于保持数据同步。
ACK
从手柄到主机的应答信号。
此信号在每个8 bits数据发送之后的最后一个时钟周期变低,并且A TT 一直保低电平。如果ACK 信号不变低约60微秒PS主机会试另一个外设。
塑胶结构设计资料
第一章结构建模 第一节结构建模简述 1、建模就是构建模型,在产品结构设计中,建模指的是构建三维外观模型,通过专业的三 维设计软件对看得见但摸不着的ID平面进行立体的呈现。 第二节产品模板介绍及自顶向下的设计理念 1、自顶向下的设计理论 1)首先创建一个顶级组件,也就是总装配图,后续工作是指围绕这个构建展开; 2)给这个顶级组件创建一个骨架,骨架相当于地基,骨架在自顶向下设计理念中是最重要的部分,骨架做得好坏,直接影响后续好不好修改。 3)创建子组件,并在子组件中创建零件,所有子组件与零件装配方式按默认(缺省)装配;4)所有子组件主要零件参照骨架绘制,其外形大小与装配位置由骨架来控制; 5)零件如需改动外形尺寸与装配位置,只需要改动骨架,重生零件即可。 第三节构建骨架模型 1、构建骨架基本要求如下: 1)外形要尽量贴近ID外形,外观曲面模具不走行位(行位又称滑块,是模具解决倒扣的机构),拔模角不小于3o; 2)要求前壳能偏面(抽壳)不小于3mm,底壳不少于3mm; 3)尺寸要方便修改,外形尺寸要能加长、加宽、加厚至少2mm,零件重生后而特征不失败; 4)零碎曲面要尽可能少。 2、做骨架的基本步骤如下: 1)参照ID图构建外形曲线; 2)构建前壳曲面; 3)构建底壳曲面; 4)构建公共曲面; 5)绘制前壳其他曲线; 6)绘制底壳其他曲线; 7)绘制左右前后侧面曲线。 第二章产品结构布局设计 第一节前壳与底壳的止口设计 1、止口分为公止口、母止口: 2、止口的作用: 1)限位。防止壳体装配时错位、产生段差。止口的作用是防止前壳朝外变形,同时防止前壳朝外变形,同时防止底壳朝内缩。 2)防ESD。止口也称为静电墙,可以阻挡静电从外进入内部,从而保护内部电子元器件,所以在设计时尽可能保留整圈止口的完整。 3、止口设计的原则:
游戏手柄模具设计流程简介与分析
游戏手柄模具设计流程简介与分析 (武汉科技大学文法与经济学院国际经济与贸易1501班陈颖颖) 【摘要】本文将游戏手柄作为设计模型,将注射模具的相关知识为依据阐述塑料注射模具的过程。本设计对游戏机手柄进行的注射模设计过程进行工艺分析,明确设计思路,确定了注射成型工艺过程并对各个部分进行了简述。对注射成形过程和手柄外壳设计,以及主浇道与分浇道的设计进行了说明。 【关键词】模具设计注射成型浇道设计游戏机手柄 近年来,塑料模具的产量和水平发展十分迅速,高效率、自动化、大型、长寿命、精密模具在模具产量中所战比例越来越大。注塑成型模具就是将塑料先加在注塑机的加热料筒内,塑料受热熔化后,在注塑机的螺杆或活塞的推动下,经过喷嘴和模具的浇注系统进入模具型腔内,塑料在其中固化成型。 一、注射成形基本过程 注射成形是现在成形热塑性塑件的主要方法,因此应用范围很广。所使用的成形机称为注射机。 注射成形是把塑料原料(一般为经过造粒、染色、加入添加剂等处理后的颗粒料)放入料筒中,经过加热融化,使之成为高粘度的流体——称为“溶体”,容柱塞或螺杆作为加压工具,使溶体通过喷嘴以较高的压力(约为25~80Mpa)注入模具的型腔中,经过冷却、凝固阶段,而后从模具中脱出,成为塑料制品。注射成形的全过程可以分为: (一)、塑化过程 现代的注射机基本上是采用螺杆式的塑化设备。塑料原料(称为“物料”)自送料斗以定容方式送入料筒。通过料筒外的电加热和料筒内的螺杆旋转的摩擦热使物料熔化,达到一定的温度后即开始注射。注射动作是由螺杆的推进完成的。(二)、充模过程 熔体自注射机的喷嘴喷出后,进入模具的形腔,把形腔内的空气排除,并充满形腔,然后升压到一定的压力,使熔体的密度增加,充实形腔的各部位。(三)、冷却凝固过程 热塑性塑料的注射成形过程是热交换的过程。即:塑化——注射充模
结构设计原理复习资料
二.填空题: 1.我国钢材按化学成分可以分为、普通低合金钢两大类。2.在钢筋混凝土构件中钢筋的作用是替混凝土受拉和。 3.混凝土的强度指标有混凝土的立方体强度、和混凝土轴心抗压强度。 4.混凝土的变形可分为受力变形和。 5.钢筋被混凝土包住,可以保护钢筋免于生锈,保证结构的。6.公路桥涵设计中所采用的荷载有永久荷载、可变荷载和。 7.当永久作用的效应对结构安全不利时,其作用分项系数取。8.当结构的状态函数Z服从正态分布时,其可靠指标与Z的成正比。9.容许应力是以平截面和的假定为基础。 10.近几十年来钢筋混凝土结构计算理论的发展,主要是由容许应力法向发展。 11.钢筋混凝土受弯构件常用的截面形式有矩形、和T形等。12.钢筋混凝土板可分为整体现浇板和。 13.混凝土保护层是具有足够厚度的混凝土层,它是取钢筋边缘至构件截面表面之间的。 14.肋板式桥的桥面板可分为周边支承板和。 15.梁内的钢筋常常采用骨架形式, 一般分为绑扎钢筋骨架和两种 形式。 16.为了避免少筋梁破坏,必须确定 钢筋混凝土受弯构件的。 17.受弯构件在荷载作用下,各截面 上除产生弯矩外,一般同时还 有。 18.把配有纵向受力钢筋和腹筋的梁 称为。 19.在矩形截面梁中,主拉应力的数 值是沿着某一条主拉应力轨迹线 逐步增大的。 20.随着剪跨比的变化,无腹筋简支 梁沿斜截面破坏的主要形态有斜拉破 坏、斜压破坏和。 21.当主拉应力超过混凝土的抗拉强 度时,构件便会。 22.钢筋混凝土构件抗扭性能有两个 重要衡量指标,它们分别是构件的开裂 扭矩和构件的。 23.根据抗扭配筋率的多少,钢筋混 凝土矩形截面受扭构件的破坏形态一般 可分为少筋破坏、、超筋破坏 和部分超筋破坏。 24.在纯扭作用下,构件的裂缝总是 与构件纵轴成方向发展。 25.扭矩和抗扭刚度的大小在很大程 度上取决于的数量。 26.普通箍筋的作用是防止纵向钢 筋,并与纵向钢筋形成钢筋骨 架,便于施工。 27.轴压柱中,螺旋箍筋的作用是使 截面中间部分混凝土成为,从 而提高构件的承载力和延性。 28.按照构件的长细比不同,轴心受 压构件可分为两种。 29.在长柱破坏前,增加得 很快,使长柱的破坏来得比较突然,导 致失稳破坏。 30.当钢筋混凝土螺旋箍筋柱承受轴 心压力时,核心部分的混凝土将处于 的工作状态。 31.钢筋混凝土偏心受压构件随着偏 心距的大小及纵向钢筋配筋情况不同, 有两种主要破坏形态,分别是受拉破坏 和。 32.可用受压区高度界限系数或 来判别两种不同偏心受压破坏形态。 33.钢筋混凝土偏心受压构件按长细 比可分为短柱、长柱和。 34.实际工程中最常遇到的是长柱, 由于最终破坏是材料破坏,因此在设计 计算中需考虑由于构件侧向挠度而引起 的的影响。 35.试验研究表明,钢筋混凝土圆形 截面偏心受压构件的破坏最终表现 为。 36.当纵向拉力作用线与构件截面形 心轴线相重合时,此构件为。 37.对受拉构件施加一定的,
(完整word版)《结构设计原理》复习资料.docx
《结构设计原理》复习资料 第一篇钢筋混凝土结构 第一章钢筋混凝土结构的基本概念及材料的物理力学性能 三、复 (一)填空 1、在筋混凝土构件中筋的作用是替混凝土受拉或助混凝土受。 2、混凝土的度指有混凝土的立方体度、混凝土心抗度和混凝土抗拉度。 3、混凝土的形可分两:受力形和体形。 4、筋混凝土构使用的筋,不要度高,而且要具有良好的塑性、可性,同要求与混凝土有好的粘性能。 5、影响筋与混凝土之粘度的因素很多,其中主要混凝土度、筑位置、保厚度及筋距。 6、筋和混凝土两种力学性能不同的材料能有效地合在一起共同工作,其主要原 因是:筋和混凝土之具有良好的粘力、筋和混凝土的温度膨系数接近和混凝土筋起保作用。 7、混凝土的形可分混凝土的受力形和混凝土的体形。其中混凝土的徐 属于混凝土的受力形,混凝土的收和膨属于混凝土的体形。 (二)判断 1、素混凝土的承能力是由混凝土的抗度控制的。????????????【×】 2、混凝土度愈高,力曲下降愈烈,延性就愈好。?????????【×】 3、性徐在加荷初期增很快,一般在两年左右以定,三年左右徐即告基本 止。????????????????????????????????????【√】 4、水泥的用量愈多,水灰比大,收就越小。???????????????【×】 5、筋中含碳量愈高,筋的度愈高,但筋的塑性和可性就愈差。????【√】 (三)名解 1、混凝土的立方体度────我国《公路》定以每150mm的立方体件,在 20℃± 2℃的温度和相湿度在90%以上的潮湿空气中养28 天,依照准制作方法 和方法得的抗极限度(以MPa)作混凝土的立方体抗度,用符号f cu表示。 2、混凝土的徐────在荷的期作用下,混凝土的形将随而增加,亦即在力不的情况 下,混凝土的随增,种象被称混凝土的徐。 3、混凝土的收────混凝土在空气中硬体减小的象称混凝土的收。 第二章结构按极限状态法设计计算的原则 。
结构设计总说明(带图完整版)分解
混凝土结构设计总说明 1.工程概况 1.1 本工程位于xx市xxxxx,总建筑面积约13万平方米,由多栋商铺组成; 主要功能层数高度(m) 结构型式基础类型商铺 4 15.400 框架结构独基、管桩 2.设计依据 2.1 本工程主体结构设计使用年限为50年。 2.2 自然条件:基本风压:0.35kN/m 2(50年重现期);基本雪压:0.45kN/m 2; 抗震设防参数:本工程最大地震影响系数αmax=0.04(第一设防水准);场地特征周期Tg=0.35秒;场地为可进行建设的一般地段。本工程抗震基本烈度为6 度,场地土类别为Ⅱ类。 2.3 xxx工程有限公司2014.10xxx一期-4号中心岩土工程详细勘察报告书工 程编号:2014-K53 2.4 本工程施工图按初步设计审查批复文件和甲方的书面要求进行设计。 2.5 本工程设计采用的现行国家标准规范规程主要有: 建筑结构可靠度设计统一标准GB50068-2001 建筑地基基础设计规范GB50007-2011 建筑工程抗震设防分类标准GB50223-2008 建筑抗震设计规范GB50011-2010 建筑结构荷载规范GB50009-2012 混凝土结构设计规范GB50010-2010 砌体结构设计规范GB50003-2011 地下工程防水技术规范GB50108-2008 工业建筑防腐蚀设计规范GB50046-2008 建筑桩基技术规范JGJ 94-2008 人民防空地下室设计规范GB50038-2005 多孔砖砌体结构技术规范JGJ137-2001(200 3年局部修订) 混凝土外加剂应用技术规范GB50119-2013 补充收缩混凝土应用技术规程JGJ/T 178-2009 建筑边坡工程技术规范GB/T50330-2013 工程建设标准强制性条文(房屋建筑部分)2013年版(涉及规范版本更新及修订的应按现行规范执行) 2.6 桩基静载荷试验报告和地基载荷板试验报告(本工程需有前述报告后方可进 行基础施工) 3.图纸说明 3.1 计量单位(除注明外):长度:mm;角度:度;标高:m;强度:N/mm 2。 3.2 本工程±0.000相当于绝对标高41.700m。 3.3 本工程施工图与国标11G101-1《混凝土结构施工图平面整体表示方法制图 规则和构造详图》配套使用。 3.4 结构专业设计图应与其它专业设计图配合施工,并采用下列标准图: 国标 11G101-1、11G101-2、11G101-3、11G329-1;中南标 12ZG002、12ZG003、12ZG313 3.5 管桩专项说明另详。 3.6 本工程在设计使用年限内未经技术鉴定或设计许可,不得改变结构的用途和 使用环境。
钣金产品结构设计资料(doc 26页)
钣金产品结构设计资料 第一章金属材料 SPCC 一般用钢板,表面需电镀或涂装处理 SECC 镀锌钢板,表面已做烙酸盐处理及防指纹处理 SUS 301 弹性不锈钢 SUS304 不锈钢 镀锌钢板表面的化学组成------基材(钢铁),镀锌层或镀镍锌合金层,烙酸盐层和有机化学薄膜层. 有机化学薄膜层能表面抗指纹和白锈,抗腐蚀及有较佳的烤漆性. SECC的镀锌方法 热浸镀锌法 : 连续镀锌法(成卷的钢板连续浸在溶解有锌的镀槽中 板片镀锌法 (剪切好的钢板浸在镀槽中,镀好后会有锌花. 电镀法: 电化学电镀,镀槽中有硫酸锌溶液,以锌为阳极,原材质钢板为阴极.
1-2产品种类介绍 1.品名介绍 材料规格后处理镀层厚度 S A B C*D*E S for Steel A: EG (Electro Galvanized Steel)电气镀锌钢板---电镀锌 一般通称JIS 镀纯锌 EG SECC (1) 铅和镍合金合金EG SECC (2) GI (Galvanized Steel) 溶融镀锌钢板------热浸镀锌 非合金化 GI, LG SGCC (3) 铅和镍合金 GA, ALLOY SGCC (4) 裸露处耐蚀性2>3>4>1 熔接性2>4>1>3 涂漆性4>2>1>3 加工性1>2>3>4 B: 所使用的底材 C (Cold rolled) : 冷轧
H (Hot rolled): 热轧 C: 底材的种类 C: 一般用 D: 抽模用 E: 深抽用 H: 一般硬质用 D: 后处理 M: 无处理 C: 普通烙酸处理---耐蚀性良好,颜色白色化 D: 厚烙酸处理---耐蚀性更好,颜色黄色化 P: 磷酸处理---涂装性良好 U: 有机耐指纹树脂处理(普通烙酸处理)--- ---耐蚀性良好,颜色白色化,耐指纹性很好 A: 有机耐指纹树脂处理(厚烙酸处理)---颜色黄色化,耐蚀性更好 FX: 无机耐指纹树脂处理---导电性 FS: 润滑性树脂处理---免用冲床油 E: 镀层厚
游戏机手柄按钮注塑模具毕业设计
毕业设计(论文)任务书 题目名称: 学院: 专业年级: 姓名: 班级学号: 指导教师: 二O一三年一月六日
一、毕业设计(论文)的目的与要求: 目的: 1. 掌握机械工艺装备设计的一般方法及基本工序。重点是巩固和加强机械零件设计、机械制 造工艺与装备、机械制图、模具设计和模具制造工艺等专业理论知识在实际生产中的应用。 2. 掌握并灵活运用CAD/CAM/CAE技术来进行注射模具的设计和生产制造,使学生获得资料 和手册查阅方法、计算机辅助设计与制造、模具结构设计与工艺研究等方面的能力。 3. 培养学生综合运用所学的理论知识去分析和解决模具设计与制造工艺等方面的实际工程 问题的能力。 要求: 1. 在课题进行过程中,学生要按时、独立完成设计任务,每周向指导教师汇报设计进展情况, 并保证设计质量,不允许数据造假、网上下载和拼凑。 2. 根据设计课题,结合指导教师对课题的概况介绍,要求学生学会通过调研、网上检索等方 式收集和整理相关手册、论文、著作等技术资料。 3. 结合相关资料的查阅和企业实习,撰写课题的实习报告和实习体会。根据网上检索和企业 调研了解课题,撰写开题报告。 4. 利用CAD软件对模具进行结构设计,然后用CAE软件对塑件进行模流分析,最后根据设 计流程,撰写设计说明书。 二、毕业设计(论文)的内容: 本课题要求学生对游戏机手柄按钮进行工艺分析,然后确定模具结构,并完成注塑模设计。主要技术要求是:1)结构合理2)良好的加工工艺性3)模具标准化 1.查阅与课题相关的中外文资料,进行调研,熟悉课题,撰写开题报告和翻译英文文献一份。2.熟悉游戏机手柄按钮的图样和技术条件,并对游戏机手柄按钮进行结构工艺性分析。 3.合理的选择塑压设备,确定注射机的技术参数。 4.确定模具的主要结构,利用UG对游戏机手柄按钮进行三维造型及模具设计。 5.对模具主要零件进行生产工艺规划设计。 6.绘制模具装配图及主要零件图,要求2.5张A0图纸。 7.零件图标注尺寸、公差及技术条件,并进行必要的强度校核。 8.根据课题研究过程,撰写毕业设计说明书,要求1.5万字以上。
结构设计初学者必备
技术统一措施 一.荷载: 1.隔墙容重12KN/M3。内隔墙双面抹灰:12*h+0.8KN/M2 内隔墙单面贴砖:12*h+1.0KN/M2 内隔墙双面贴砖:12*h+1.2KN/M2 外墙保温按岩棉计算外墙双面抹灰:12*h+1.4KN/M2 外墙单面贴砖:12*h+1.6KN/M2 外墙双面贴砖:12*h+1.8KN/M2 外墙挂石材:12*h+2.3KN/M2 外墙保温按苯板计算外墙双面抹灰:12*h+1.2KN/M2 外墙单面贴砖:12*h+1.4KN/M2 外墙双面贴砖:12*h+1.6KN/M2 外墙挂石材:12*h+2.1KN/M2 注:1.计算墙线荷载时应扣除梁高,(特别注意砖墙上无梁时墙高度只扣除板厚);h为墙厚 2.当墙外包梁或层高处梁有建筑造型时,输入荷载时要考虑这部分重量。 3.当外墙上开较小的窗洞或开门洞时,线荷载按满墙考虑,不折减;当 外墙上开较大的窗洞时(开洞面积占墙面积的0.3以上),线荷载考虑 0.8的折减系数;当两个剪力墙之间距离等于窗洞口时,线荷载=窗下 填充墙线荷载+窗线荷载(窗荷载取 1.0KN/M2);落地幕面荷载 1.5 KN/M2。 4.与土接触的±0.000以下的墙体容重按20 KN/M3计算。 2.板荷载: (地热)一般楼板附加恒荷:2.0KN/M2活荷载按荷载规范取值 (散热器)一般楼板附加恒荷:1.5KN/M2 (地热)卫生间楼板附加恒荷:3.0KN/M2活荷:4.0KN/M2(设浴缸,坐便) (散热器)卫生间楼板附加恒荷:2.5KN/M2 活荷:8.0KN/M2(有分隔的蹲便公共卫生间)一般楼梯间恒荷:8.0 KN/M2活荷:3.5KN/M2 跨度(4m)较大楼梯恒荷:9.0 KN/M2活荷:3.5KN/M2(地热)公共走廊楼板附加恒荷:2.0KN/M2活荷载按荷载规范取值 (散热器)公共走廊楼板附加恒荷:1.5KN/M2 (地热)阳台楼板附加恒荷:2.0KN/M2活荷:2.5KN/M2 (散热器)阳台楼板附加恒荷:1.5KN/M2 (地热)电梯间楼板附加恒荷:2.0KN/M2电梯机房活荷:7.0KN/M2 (散热器)电梯间楼板附加恒荷:1.5KN/M2 不上人屋面附加恒荷:4.0KN/M2活荷:0.5KN/M2 上人屋面附加恒荷:4.5KN/M2活荷:2.0KN/M2 坡屋面附加恒荷:5.1KN/M2活荷:0.5KN/M2(按30o角,120mm 板厚折算)电梯吊钩恒荷集中力:50KN
结构设计基本知识及要点
结构设计基本知识
主要内容 1.结构设计基本知识简介 ?建筑结构体系及结构型式 ?框架结构 ?框架剪力墙结构 ?转换层结构 2.案例分析 ?案例一地铁螳螂山 ?案例二天津某住宅 ?案例三华润酒店 ?案例四平安中心投标 ?案例五住宅设计中经常与建筑需要协调的问题?案例六世纪中心
结构设计基本知识简介 结构型式: 按结构材料划分有: ?砌体结构(包括加构造柱圈梁) ?钢筋砼结构 ?钢结构 ?混合结构(钢管混凝土柱、型钢混凝土柱+钢梁) 结构体系: 框架结构、框架剪力墙体系,剪力墙体系,巨型框架、框架筒体结构、筒中筒结构体系等
结构体系的定义 框架结构体系 由梁(包括桁架)、柱等杆系组成的能承受垂直和 水平力作用的空间结构(可含少量墙肢)。剪力墙结构体系 主要由双向墙肢和连梁组成的空间结构(包括短肢 剪力墙和壁式框架结构)框架剪力墙体系由框架、剪力墙共同组成的结构体系,但以剪力墙 为主承受水平力。 一般由筒和板梁组成的结构,可分为内筒外框(或 筒体结构体系 称核心筒)、筒中筒、框架-核心筒和多筒体结构。 由密排柱及楼层上的裙梁构成的筒体称为框筒。 其他结构体系 以上体系以外的体系如板柱结构体系,悬挂结构 体系,侧向支撑体系,膜结构体系、空间网架等。
结构型式选择原 则 ) a) 结构体系与结构型式的合理选择是结构设计的重要环节。结构选型必须在建筑物的使用要求,工程特点,自然环境,材料供应,施工技术条件,抗震设防,地质地形等情况充分调查研究和综合分析的基础上进行,必要时还应做多方案比较,择优选用。基础上进行必要时还应做多方案比较择优选用。 b) 同结构单元中,钢筋砼结构不宜与砖砌体结构b)同一结构单元中钢筋砼结构不宜与砖砌体结构混合使用(混用是指平面方向的承力构件不同材料而言,而底层为钢筋砼框架,其上为砖砌体结构的而言而底层为钢筋砼框架其上为砖砌体结构的竖向布置不在列中)。在抗震要求时,不宜选用砌体结构 体结构。
游戏手柄外壳模具设计
目录 第1章绪论 1.1注射成形基本过程………………………………………………………… 1.2注射模的基本结构……………………………………………………第2章游戏手柄外壳的造型设计………………………………………………… 2.1游戏手柄外壳的选料及其性 能……………………………………………… 2.2游戏手柄外壳注射成型工艺过程…………………………………………………… 2.3游戏手柄外壳的结构分 析…………………………………………………… 2.4 游戏手柄外壳造型设计过程……………………………………………………… 第3章成型零件与浇注系统的设计……………………………………………… 3.1浇注系统计………………………………………………………………… 3.1.1 主浇道的设计………………………………………………………… 3.1.2分浇道的设计………………………………………………………… 3.1.3 浇口及冷料穴设计…………………………………………………… 3.1.4铸模和开模…………………………………………………………… 3. 2 冷却系统设 计……………………………………………………………… 3.3.1 凹、凸模冷却系统设计……………………………………………… 第4章模具零件设计………………………………………………………………… 4.1 推出系统设计……………………………………………………………… 4.2 确定模架…………………………………………………………………… 4.3 模架各装配零件设计……………………………………………………… 4.3.1 导向零件设计……………………………………………………… 4.3.2 浇注系统零件设计…………………………………………………… 4.3.3 推出机构零件……………………………………………………… 4.3.4定位圈………………………………………………………………… 4.3.5 其他零件………………………………………………………………
《混凝土结构设计》复习资料
复习资料(部分) 概念题 1、单向板:只在一个方向弯曲或主要在一个方向弯曲的板。 2、双向板:在两个方向弯曲,且不能忽略任一方向弯曲的板。 3、张拉控制应力:是指张拉钢筋时,张拉设备上的压力表所控制的总张拉力 除以预应力钢筋面积得出的应力值。 4、预应力损失:预应力钢筋在张拉过程中、由于材料性能、张拉工艺等原因, 使预加应力阶段及长期使用过程中,预加应力不断减小的现象。 5、塑性理论计算法:是以弹性理论计算法为依据,以构件实际受力情况为基 础,考虑构件塑性变形内力重分布的一种计算连续梁内力的方法。 6、等高铰接排架:凡横梁均铰接于柱顶的单层排架,且当排架发生水平位移 时,各柱顶位移均相同。 7、全框架结构:由梁、柱组成框架承重体系,内、外墙起填充、围护作用。 8、“D”值法:柱的侧移刚度不但与柱本身的线刚度和层高有关,而且还与 梁的线刚度有关;柱的反弯点高度不应是个定值,而应是个变数,它随该柱与梁间的线刚度比,该柱所在的楼层位置,上下层梁间的线刚度比,以及上下层层高的不同而不同,甚至与房屋的总层数等因素也有关。 简答题 1、现浇板上需开设一直径为500毫米的空洞,请简述构造处理措施。 答:要点:空洞的直径属于300mm 我们先来编一个幸运7游戏机程序,也可以叫做一个游戏软件,亲身感受一下面向对象编程是怎么回事。也许您已经有了面向过程的编程(即传统的编程)经验,那么在这里您会感到面向对象编程真是一件很享受的事情。如果您没有面向过程的编程经验,那太好了, 您永远都不会陷入一大堆复杂的代码中找不着北,而能在轻松之中便编出具有专业水准的程序。 言归正传,前面讲过编一个软件会产生很多文件,如果只是编一个简单的软件,也可能只有一个文件,但不管多少,我们首先要在硬盘上为这个软件建一个目录,然后在编程的过程中,将产生的有关文件全部放在这个目录中以便于管理。 目录建好后启动FOXPRO 5.0(3.0也行),启动后将看到图1。 开始编软件之前先说明一下这是一个什么软件,它是一个类似赌博的游戏机,图2。 按下开始按钮后,上面的三个窗口就会出现三个随机数,如果其中有“7”则赢,否则为输。现在开始正式编程,按第一课讲的首先要建一个项目管理器(它和上面所说的目录不同,目录是为了把所有文件放在一起以免与其它文件混淆,项目管理器则是将各种文件分类),建立的方法是调用菜单中的“文件”下的“新建”命令,或按工具栏上的“新建”按钮 ,接着会出现图3。 按新建文件(隐含为新建项目管理器,即文件类型为“项目”),接着在下面的窗口中输入项目管理器的文件名(如“xy7”,不用扩展名),然后选择保存目录,即在上面的“保存在”选择框中找到您所建的目录,并将其打开,图4。 接着出现图5。 按“文档”得到图6,注意此时“表单”是反白的,如不是用鼠标点一“表单”。 按“新建”得到图7。 按“新建表单”得到图8。 这里我们看到有一个表单设计器,其中的“Form1”就是要用来编游戏机的界面,也就是被称为“表单”的东西,现在我们就要用这个表单设计器来设计我们的游戏机界面。 下面开始制做显示数字的文本框,调出表单控件工具栏,方法为按工具栏按钮,出现图9: 调用文本框控件,即按下文本框按钮,把鼠标移到表单Form1上,其光标应变成“十”字型,将鼠标移到一个您认为适当的位置,按下左键,向右下方拉,使拉出的文本框大小适当,松手,得到图10,(在此约定,以后如没有特别说明,“按鼠标”即指按鼠标 左键,其它如“点”、“按”、“用鼠标按”等也同样): 这样就做好了文本框Text1,用来在软件中显示第一个随机数。如觉得位置不理想,可用鼠标按住它,将其移到合适的位置,如感到大小不合适,可用鼠标按住文本框四周的8个黑点中的任一个,上下左右拉动来改变其大小。 接下来设置文本框的其它属性,如字体大小,用鼠标按“属性窗口”按钮(如该按钮是凹下的,如图,说明属性窗口已调出,只是被表单控件工具栏给挡住了,再按一下工具栏的按钮 结构设计原理 一.名词解释 1.★钢筋混凝土结构:由钢筋和混凝土两种力学性能不同的材料组成,且二者有效地结合共同发挥作用。 2★ⅰ原点弹性模量:在混凝土受压应力—应变曲线的原点作切线,该切线的斜率即为原点弹性模量ⅱ切线模量:在混凝土应力—应变曲线上某一应力处作切线,该切线的斜率即为相应于应力时的切线模量。ⅲ变形模量:连接混凝土应力—应变曲线的原点O及曲线上某一点K作割线,K点混凝土应力为,则该割线的斜率即为变形模量。 3★混凝土的收缩:混凝土在空气中结硬时体积随时间推移而减小的现象。 4★钢筋拉伸应力—应变关系曲线分为:有明显流幅的和没有明显流幅的 5★屈服强度:用较稳定的屈服下线作为依据的强度。 6★屈强比:屈服强度与抗拉极限强度的比值【它可以代表材料的强度储备,一般屈强比不大于0.8】 7★黏结应力:钢筋受力后在沿钢筋与混凝土接触面上产生的剪应力。 8★结构可靠性:结构和结构构件在规定时间内、规定的条件下完成预定功能的可能性。9★可靠概率(结构可靠度):出现后一事件的概率。 10★承载能力极限状态:对于桥涵及其构件达到最大承载能力或出现不适于继续承载的变形或变位的状态。 11★塑性理论:是桥梁构件的承载能力极限状态的计算基础,设计原则:作用效应最不利组合的设计值必须小于或等于结构抗力的设计值。 12★配筋率:所配置的钢筋截面面积与规定的混凝土截面面积的比值。 13★抵抗弯矩图(材料图):沿梁长个正截面按实际配置的总受拉钢筋面积能产生的抵抗14★预应力混凝土:就是人为地在混凝土或钢筋混凝土中引入内部应力,且其数值和分布恰好能将使用荷载产生的应力抵消到一个合适程度的配筋混凝土。 15.★预应力度:由预加应力大小确定的消压弯矩与外荷载产生的比值 16.★先张法:指的是先张拉钢筋,后浇筑构件混凝土的方法。施工工序: 17.★后张法:指先浇筑构件混凝土,待混凝土结硬后,再张拉预应力钢筋并锚具的方法。18★钢筋的张拉控制应力:指预应力钢筋锚固前张拉钢筋的千斤顶所显示的总拉力除以预应力钢筋截面积所求得的钢筋应力值。 19.★砖石结构:将砖、天然石等用胶结材料连接成整体的结构。 20.★块材:圬工结构中的砖、及混凝土预制块材料等称为块材。 21★砌体的线膨胀系数:当温度每升高1摄氏度,单位长度砌体的线性伸长。 22.★钢结构:用钢板和型钢作基本构件,采用焊接、铆接或螺栓连接等方法,按照一定结构要求连接起来,承受规定荷载的结构物。 23.★冷弯性能:钢材在常温下加工产生塑性变形时,对产生裂缝的抵抗能力。作用:检验钢材的弯曲程度;显示钢材的缺陷程度。 24.★钢材的冲击韧性:钢材在冲击荷载作用下吸收机械能的一种能力。作用:衡量钢材抵抗可能因低温、应力集中、冲击作用而导致脆性断裂的一项力学性能指标。 25.★疲劳破坏及疲劳强度:钢材在连续的反复荷载作用下,其应力虽然低于抗拉强度,甚至低于屈服点时,会使构件产生突然破坏,这种现象叫钢材的疲劳破坏。导致疲劳破坏的应力叫疲劳强度。 技术文件技术文件名称:XX整机结构设计方案技术文件编号: 版本: 文件质量等级: 共页 (包括封面) 拟制 审核 会签 标准化 批准 目录 1概述-----------------------------------------------------------------------------------------------------1 1.1 设计目标--------------------------------------------------------------------------------------------------1 1.2设备组成--------------------------------------------------------------------------------------------------1 1.3外部接口--------------------------------------------------------------------------------------------------1 1.4缩略语-----------------------------------------------------------------------------------------------------1 1.5参考文献--------------------------------------------------------------------------------------------------1 2外观造型设计------------------------------------- ----------------------------------------------------1 3整机结构布局------------------------------------------------------------------------------------------1 3.1整机结构布局图--------------------------------------------------------------------------------------1 3.2整机结构组成----------------------------------------------------------------------------------------1 4机械强度设计-------------------------------------- -----------------------------------------------------1 5走线设计------------------------------------------------------------------------------------------------1 6人机界面设计-----------------------------------------------------------------------------------------1 7 设备兼容性设计-------------------------------- -----------------------------------------------------1 8 电磁兼容设计----------------------------------------------------------------------------------------1 9 热设计--------------------------------------------------------------------------------------------------1 9.1 热耗的计算----------------------------------------------------------------------------------------------1 9.2 散热方案--------------------------------------------------------------------------------------------1 10 接地和和防静电设计------------------------------------------------------------------------------------2 11 可维护性设计----------------------------------------------------------------------------------------------2 12 其它设计---------------------------------------------------------------------------------------------------2 13 方案分析比较--------------------------------------------------------------------------------------------2 14 方案确定--------------------------------------------------------------------------------------------------2 15 产品成本预算--------------------------------------------------------------------------------------------2 结构设计原理 一、填空题 1. 对梁施加预应力,可提高梁的 。 2.矩形截面大偏心受压构件截面设计时令0h x b ξ=,这是为了 。 3.《公路钢筋混凝土及预应力钢筋混凝土桥涵设计规范》(JTG D62-2004)规定,预应力混凝土构件的混凝土强度等级不应低于 。 4.与素混凝土梁相比,钢筋混凝土梁抵抗开裂的能力 。 5.混凝土的收缩 。 6.钢筋的屈服强度是指 。 7、对后张法预应力混凝土构件,一次性张拉预应力筋,混凝土受到的最大预压应力发生在 。 8.梁的抗剪设计中,如果出现0230)105.0(bh f V td d αγ-?≤的情况,应该 。 9.螺旋箍筋约束混凝土使其抗压强度提高的原因是 。 10.全预应力混凝土构件在使用条件下,构件截面混凝土 。 11.荷载效应S 、结构抗力R 作为两个独立的基本随机变量,其功能函数S R Z -= 则有: 。 12.与素混凝土梁相比,钢筋混凝上梁承载能力 。 13.双筋矩形截面正截面受弯承载力计算,验算s '2a x ≥是为了 。 14.混凝土保护层厚度是指 。 15.要求梁的弯矩包络图必须位于材料抵抗图之内 ,是为了满足 。 16.对于无腹筋梁,当31<<λ时,常发生 破坏。 17.有明显流幅的钢筋和没有明显流幅的钢筋相比 。 18.混凝土若处于三向应力作用下,当 。 19、钢筋混凝土偏心受压构件,其大、小偏心受压的根本区别是 。 20.纵筋弯起时弯起点必须设在该钢筋的充分利用点以外不小于2/0h 的地方,这一要求是为了保证 。 21.偏心受压构件,当03.0h e i <η,但0h x b ξ<时,该构件将发生 破坏。 22. 预应力钢筋的松弛损失和徐变量都与预应力筋的张拉应力值密切相关,张拉应力越大,松弛损失 ,徐变变形 。 PC(平板电脑安卓系统)游戏模式(横向)(首先需要安装讯飞输入法)(下载游戏时,注意是否支持蓝牙手柄) PC( tablet ,computer and Android system) game mode(Horizontal)( please download iFlytek Input first)( and please make sure the games which support Bluetooth Controller when you download games on line) @+B为横向手柄游戏模式,标准为遥杆控制方向,ABCD键为其它功能设定(正常B键开枪,D键起跳)。具体按各品牌手机对键盘的设定来取决。在使用手柄玩PC里面游戏时,手柄都是设定为横向操作模式。合适的游戏有在快游戏里面下载(比如无敌忍者猫、R-TYPE,需要玩家设定手柄操作键)。在小鸡模拟器里面下载手柄类游戏(比如:永恒战士2、末日骑士Soulcraft)。以上游戏在小鸡模拟器或快游戏平台下载。 @+B is the horizontal gamepad mode , the rocker on the gamepad controls directions. Key ABCD are for other function settings( Normally Key B is shooting , Key D is jumping). For key board settings, it is differ for different mobile phones. When you play PC games, the gamepad should be set to horizontal mode. For related games, please download them from Kuai Games( For instance: NinjaCat, R-TYPE, need to set the gamepad operating key). Download games in The Chicken Simulator( For instance: The Eternal Struggle, Doom Knight, Soulcraft). 安卓手机VR游戏模式(单手操作手柄模式)(首先需要安装讯飞输入法)(下载游戏时,注意是否支持蓝牙手柄) VR game mode for Android mobile phones (single hand operating gamepad mode)( Please download iFlytek Input first) ( and please make sure the games support Bluetooth Controller when you download games on line) @+C为VR模式时,在玩游戏时,遥杆控制方向,前面侧键为开枪与起跳。需要在3D播播里面下载支持手柄类游戏,请玩家下载游戏时先看游戏说明。 比如游戏:射击游戏Aste vroid , VRangrybots, 场境体验游戏比如:VR Theme park, 初音X 洛天使、VR Escape Borg、Orbital VR。以上游戏在3D播播平台下载。 @+C is VR mode , when you play games ,the rocker on the gamepad controls the directions, the front side keys are for shooting and jumping function when you play games. Please download the games which support gamepad in 3D Bobo. And read the requirements before download games. For instance: Shooting games Aste Vroid, VRangrybots,.Scene experience games : VR Theme park, VR Escape Borg, Orbital VR. Above games please download them in 3D Bobo . 安卓手机VR游戏模式(横向手柄:@+B)(首先需要安装讯飞输入法)(下载游戏时,注意是否支持蓝牙手柄) VR game mode for Android(Horizontal gamepad mode: @+B)( and please make sure the games support Bluetooth Controller when you download games on line) 建筑工程资料 第一章工程管理资料 工程概况表 工程开工报告 工程竣工报告 工程停工报告 工程复工报告 施工进度计划分析 项目大事记 施工日志 不合格项处置记录 建设工程质量事故报告书 第二章工程技术资料 工程技术文件报审表 技术交底记录 图纸会审记录 设计交底记录 设计变更\洽商记录 第三章工程测量记录 工程定位测量记录 地基验槽记录 楼层放线记录 沉降观测记录 单位工程垂直度观测记录 第四章工程施工记录 隐蔽工程记录表 预检工程记录表 施工通用记录表 中间检查交接记录表 地基处理记录 地基钎探记录 桩基施工记录 混凝土施工记录 混凝土养护测温记录 砂浆配合比申请单 混凝土配合比申请单 混凝土开盘鉴定 预应力张拉记录 预应力筋张拉记录 有粘接应力结构灌浆记录 建筑烟(风)道检查记录 自动扶梯\自动人行道安装调试记录 第五章工程试验记录 施工试验记录(通用) 混凝土试块强度统计\评定记录 砂浆试块强度统计\评定记录 防水工程试验检查记录 设备单机试运转记录 调试报告 电气接地电阻测试记录 电气器具通电安全检查记录 电气照明、动力试运行记录 综合布线测试记录 电气绝缘电阻测试记录 光纤损耗测试记录 视频系统末端测试记录 管道灌水试验记录 管道强度严密性试验记录 管道通水记录 管道吹(冲0洗()脱脂试验记录 室内排水管道通球试验记录 伸缩器安装记录表 现场组装除尘器、空调机漏风检测记录 风管漏风检测记录 各房间室内风量测量记录 管网风量平衡记录 电梯主要功能检查记录表 第六章施工验收记录 分项工程质量验收记录 分部(子分部)工程质量验收记录 单位(子单位)工程质量控制资料核查记录 单位(子单位)工程安全和功能检验资料核查及主要功能抽查记录 单位(子单位)工程观感质量检查记录 施工现场质量管理检查记录 工程检验质量检查记录表(通用) 分部分项工程 共划分为:一、地基与基础工程;二、主体结构;三、建筑装饰装修;四、建筑屋面; 五、建筑给水、排水及采暖;六、建筑电气;七、智能建筑;八、通风与空调;九、电梯游戏机制作简略步骤
结构设计原资料整理篇
结构设计方案模板资料
结构设计复习资料
游戏手柄操作说明
木结构工程资料(全套)