第四章控制与设计

控制与设计
一、考点
(1)了解控制的含义及其在生产和生活中的应用。
(2)通过典型的案例了解手动控制、自动控制,了解简单的开环控制系统和闭环控制系统的基本组成和简单的工作过程。
(3)能识别简单的闭环控制系统的方框图,了解其中的控制器、执行器等环节的作用,了解反馈环节的作用。
(4)了解影响简单控制系统运行的主要干扰因素。
(5)了解简单的被控制对象的基本特性,了解被控量、控制量。
二、知识点
1、控制:人们根据自己的目的,通过一定的手段,使事物沿着某一确定的方向发展就形成了控制。
控制技术的广泛应用,提高了产品质量,降低了生产成本,增长了劳动生产率,使人们从繁重或危险的体力劳动和重复的手工操作中解放出来。
2、手动控制:控制过程是在人的直接干预和全程干预下进行的。
自动控制:指在无人直接参与的情况下,事物的变化准确地按照期望的方向进行。
3、控制系统的输出量不对系统控制产生任何影响,这种控制称为开环控制系统系统的输出量返回到输入端并对控制过程产生影响的控制系统是闭环控制系统
4、干扰因素:在控制系统中,除输入量(给定值)以外,引起被控量变化的各种因素成为干扰因素。控制系统中,干扰因素可能有一个,也可能有若干个,有的是人为的,有的是由于环境造成的。
5、在正常工作状态下,其输出与输入之间的关系,输出与干扰之间的关系称为被控对象的基本特性。
被控量:就是输出量;通过控制量来实现对被控量的控制。
三、例题
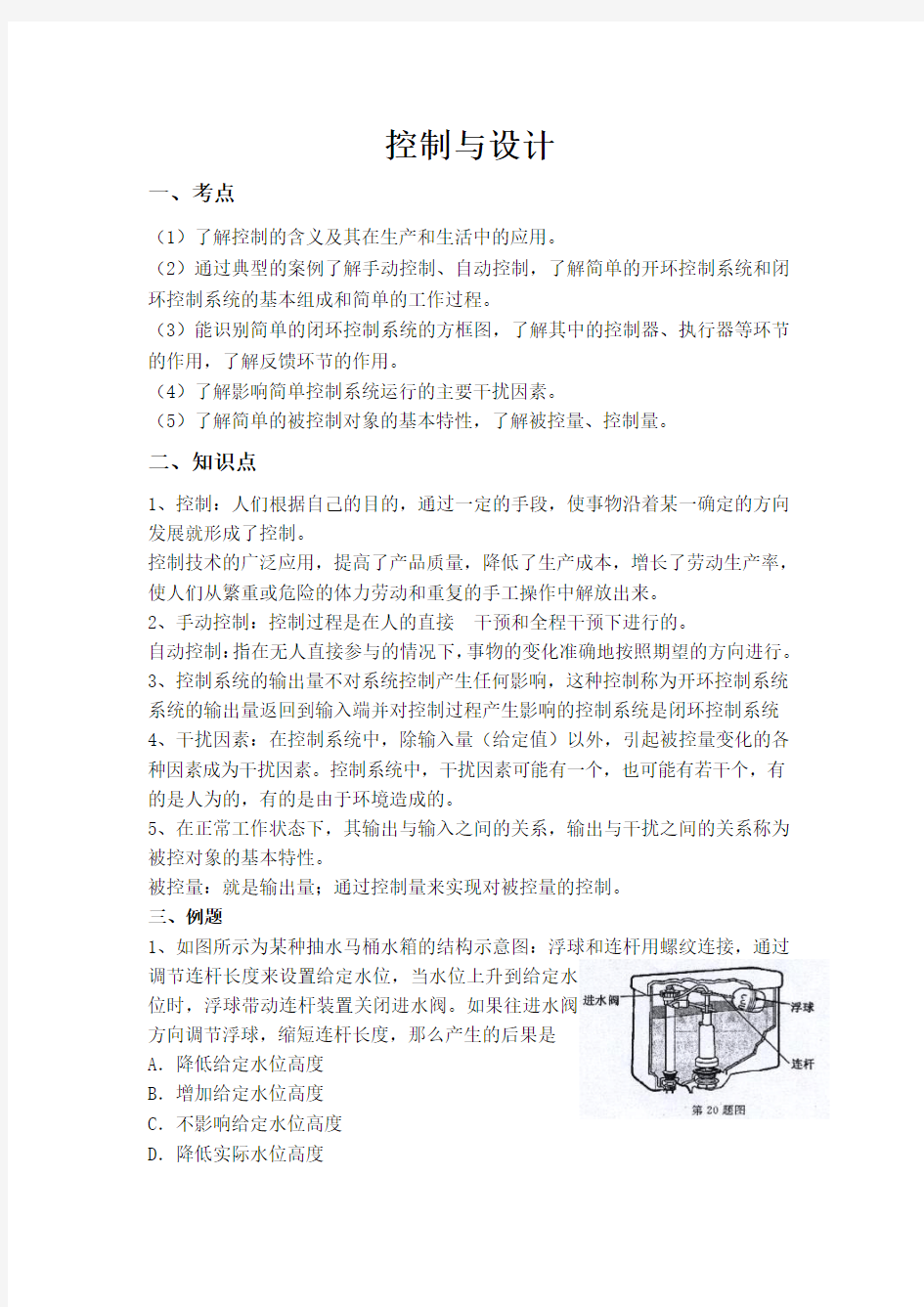
1、如图所示为某种抽水马桶水箱的结构示意图:浮球和连杆用螺纹连接,通过调节连杆长度来设置给定水位,当水位上升到给定水
位时,浮球带动连杆装置关闭进水阀。如果往进水阀
方向调节浮球,缩短连杆长度,那么产生的后果是
A.降低给定水位高度
B.增加给定水位高度
C.不影响给定水位高度
D.降低实际水位高度
解析:如果向进水阀方向调节浮球,缩短连杆长度,那么浮球位置将上升。依据杠杆原理,要关闭进水阀,浮球的位置将会上升的更高。所以向进水阀方向调节浮球,也就增加了给定水位,那么在稳定状态下水箱的实际水位也变高了。所以此题选B。
2、要设计该温室的温度自动控制系统,下列器件中不需要用到的是
A.安全监控摄像头
B.温度传感器
C.加热器
D.温度控制器
解析:此题要求我们知道一个控制系统包含那些部件。作为一个自动温度控制系统,必须要有检测设备(温度传感器),控制器(温度控制器),执行器(加热器),而安全监控摄像头是为了便于操作员实时监控温室内的情况而设置的,与温度自动控制系统无关。
3、闭环控制系统中反馈的作用是()
A、消除干扰因素
B、实现自动控制
C、减少输入量的偏差
D、减少输出量的偏差
解析:此题主要考学生对控制系统中反馈环节作用的了解,所以此题选D。
测试题
1、自行车的刹车控制是属于()
A、机械控制
B、气动控制
C、液压控制
D、电子控制
2、下例所述属于自动控制的是()
A、驾驶汽车
B、拖地板
C、用ATM取款
D、人工纺纱
3、下面控制系统中,属于开环控制的有:()
①电冰箱恒定温度控制系统,②电风扇机械定时开关控制系统,③电子门铃控制系统,④GPS自动导航系统,⑤路灯自动开关控制系统。
A.1个 B.2个 C.3个 D.4个
4、下面控制系统中,属于闭环控制的有()
A、电风扇机械定时开关控制系统
B、电子门铃控制系统
C、加热炉温度自动控制系统
D、自动门
5、在游泳池注水控制系统中,其输出量是()
A、设定的时间
B、定时器发出的信号
C、阀门输出的信号
D、游泳池的水位
6、在控制系统框图中,干扰作用一般表示在()上
A、控制器 B执行器 C被控对象 D、反馈环节
7、自行车刹车装置的作用是制动,当需要减速或制动时,给握把施加一定的力,通过杠杆系统,将刹车片压紧车圈(或轮轴),使车轮减速或制动。在这个控制系统中执行器是()
A、握把
B、杠杆系统
C、刹车片
D、车轮
8、家用普通台灯增加调光控制装置后,使台灯的功能得到了优化,这说明()
A、增加系统要素是系统优化的手段
B、增加系统要素是系统优化的必然手段
C、调光控制装置是系统的约束条件
D、调光控制装置使台灯的质量得到提高
9、如图所示是电热水器温度自动控制系统
的示意图,当热电偶测到水温低于设定值,
控制电路接通加热丝,加热储水箱中的水,
使水温达到设定值,关于该控制系统的组
成,下列说法中不正确的是(浙江省2012年
3月高考)
A.被控对象是水箱中的水
B.控制器是加热丝
C.被控量是出水温度
D.设定量是所要求的水温
10、在电冰箱的温度控控制系统中,下列情况不属于影响其温度控制的干扰因素:( )
A 、开电冰箱门
B 、电冰箱所在房间的温度从20摄氏度变到32摄氏度
C 、电热菜或热饭放入电冰箱中
D 、在电冰箱外放一盆冷水 11、如图所示是一款太阳能饭盒,每个饭盒都有独立的温度控制系统,当饭煮熟后,自动进入保温状态,该饭盒温度控制系统的控制手段和控制方式属于(浙江省2012年3月高考)
A.手动控制、开环控制
B.自动控制、闭环控制
C.自动控制、开环控制
D.手动控制、闭环控制 12.如图所示为自动火炮控制系统示意图。当雷达检
测到飞机后发出信号给跟踪系统,跟踪系统操纵火炮,调整火炮角度,该系统中被控对象是
A .火炮
B .跟踪系统
C .雷达
D .飞机
13.下图是房间温度控制系统的方框图,请回答下列问题。
(1)本控制系统中的控制对象是什么?
(2)本控制系统中的被控量和输入量是什么?
(3)在该控制系统工作时,打开空调房间的门窗,对控制系统起什么作用?
14.节约用水应从身边做起。某同学设计了能使生活废水充分利用的冲厕方案。请据图回答以下问题:
(1)废水储水池的底部位置应该_(高于、低于、等于)冲厕水箱的设定水位。
(2)说明阀门l 不能省略的原因。
(3)木制支架是否为稳定结构?
15.下图是声控灯系统组成示意图,根据你的理解和认识回答下列问题。
(1)该系统是开环控制系统还是闭环控制系统?
(2)画出声控灯的系统框图
(3)如果声控灯的附近并没有来人,而出现意外的声响,如楼上或隔壁有人高声说话或有动作发出声响,灵敏度高的声控灯也会应声而亮。为避免这种情况你有什么好办法?
(4)该控制系统的被控对象和输出量是什么?
~电源
16、王大伯盖了一个能自动调节温度的小型花房,花房的温度冬季一般控制18度,夏季一般控制在25度左右。该花房温控设备包括控制装置,加热元件和制冷元件,温度检测仪等。
(1)花房的温度调节系统是开环控制系统还是闭环控制系统?
(2)试描述它的工作原理;
(3)画出控制框图。
(4)它可能受到的干扰因素有哪些?
17、风力发电机运行时风轮对准风向才能获得
最大风能,如图所示是风力发电机跟踪风向的
控制系统示意图,风向测定装置将检测到的
风向信号送给迎风控制装置与设定值比较,迎风
控制装置根据角度偏差信号控制偏航电机运转,
调整风轮角度,使风轮始终对准风向。(浙江省2012年3月高考)
(1)根据描述,在跟踪风向的控制系统方框中处填写相应的内容。
(2)风向测定装置将检测到的风向信号送给迎风控制装置与设定值比较的过程称为(从干扰;反馈;控制中选择一项,将序号填在处)
参考答案
14.
(1)高于 (2)当废水储水池内水用完后就需要使用自来水冲厕,此时如何没有阀门l 自来水就会倒灌入废水储水池内 (3)是 15.(1)开环 (2)
(3) 把传感器的灵敏度调小一点。
(4) 被控对象是灯泡,输出量是灯的亮或灭 16.(1)闭环
(2)冬季时:温度传感器检测花房温度,并与设定温度(18度)进行比较,当气温低于18度加热元件开始加热,直到气温达到18度时停止加热;夏季时:温度传感器检测花房温度,并与设定温度(25度)进行比较,当气温高于25度制冷元件开始加热,直到气温达到25度时停止加热。 (3)
(4)打开花房门窗;外界气温;
17. (1)①迎风控制装置 ②偏航电机 ③风轮 ④如:风轮的朝向 ⑤风向测定装置 (2) ②
设定温度
(整理)高中通用技术《控制与设计》练习题
新课标高中通用技术《控制与设计》练习题 一、选择题 1、下列所述属于自动控制的是() A、驾驶汽车 B、拖地板 C、用ATM取款 D、人工纺纱 2、下列控制现象是自动控制的是:( ) A、骑自行车 B、舂米 C、用气筒给自行车的轮胎充气 D、农用灌溉抽水机抽水的控制 3、射击比赛的射手通过瞄准目标,使子弹射中靶心,分析这个过程,我们理解一个控制现象应该从()入手? A、对象 B、目的 C、手段 D、对象、目的、手段 4、“神六”在空中动行中,在地面人员对其发出变轨指令的过程中,其控制的对象是() A、返回舱 B、推进舱 C、轨道舱 D、整个飞船 5、理解一个控制现象,要明确控制的对象是什么,控制要达到什么目的和采取什么控制手段。例如,导弹控制系统控制的是导弹与目标之间的距离,目的是要击中目标(距离为零)。分析这个控制系统,其控制的对象是()。 A、人 B、目标 C、计算机 D、导弹 6、普通家用自行车的刹车控制是属于:( ) A、机械控制 B、气动控制 C、液压控制 D、电子控制 7、按时间顺序进行控制的“交通路口红绿灯控制系统”系统中被控对象是( )。 A.控制电路B.红绿灯C.开关装置D.路面车辆 8、人们使用空调器对室内温度进行调节,使人感到舒适.这是控制在()方面的应用.A、生活B、生产C、农业D、军事 9、下列控制系统中,属于开环控制系统的是()。
A、智能电冰箱的温度控制 B、计算机的CPU上的风扇的转速控制 C、现代化农业温室的温度控制 D、红绿灯定时控制系统 10、理解一个控制现象,要明确控制的对象是什么,控制要达到什么目的和采取什么控制手段。例如,射击比赛的射手通过瞄准目标,使子弹射中靶心,分析这个过程,其控制的对象是() A.人B.枪C.子弹 D.靶 11、下列不属于开环控制系统的是:() A、自动门 B、自动声控灯 C、自动烘手机 D、电饭锅温控系统 12、根植于历史文化名城泉州的提线木偶戏古称“悬丝傀儡”,又名“丝戏”,民间俗称“嘉礼”,乃流行于闽南语系地区的古老珍稀戏种,在提线木偶的控制过程中控制对象是()。 A.手B.提绳C.木偶D.大脑 13、上题的案例中,演员对提线木偶的控制过程属于()。 A.人工控制B.自动控制C.机械控制 14、在电冰箱温度控制中不属于干扰因素的是() A、打开冰箱门 B、把食物放到冰箱内 C、市电电压下降 D、房间温度变化很大 15、控制系统中属于自动控制系统的是() A、按钮开关控制 B、普通自来水龙头 C、花房恒温度控制 D、汽车驾驶 16、在电冰箱温度控制中不属于干扰因素的是(C) A打开冰箱门 B 把食物放到冰箱内 C 市电电压下降2伏 D 房间温度变化很大 17、电冰箱工作时温度设定在一定的范围值,当箱内温度变化超过设定的范围值时,热敏电阻的阻值也相应地变化,通过热敏电阻的变化电流经过三极管放大器的放大,带动继电器,
电镀生产线控制系统课程设计
学号:0120918950930 课程设计 题目电镀生产线控制系统 学院物流工程学院 专业 班级 姓名 指导教师 2013年1月2日
本科生课程设计成绩评定表 指导教师签字: 2013年 01 月 18 日
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目: 电镀生产线控制系统 一、初始条件 程序运行设备:西门子S7-300 PLC 二、要求完成的主要任务 1.控制要求:实现手动、单周期、连续、单步四种工作方式的控制。以四种工作方式进行上行、下行、右行、左行四种运动,来实现清洗、风干、电镀、定时四种过程的电镀工作。 2.设计要求: (1)绘制PLC接线图; (2)给出符号定义表; (3)编写控制程序; (4)上机验证通过程序调试。 3.课程设计说明书应包括: (1)设计的目的及意义 (2)设计任务及要求 (3)设计方案比较及认证 (4)程序设计:软件思想,流程图,程序说明 (5)调试过程记录及结果分析 (6)参考资料 (7)总结
三、时间安排: 四、主要参考资料 【1】张晓川编著.仓储物流技术与装备[M].化学工业出版社,2003年 【2】邓星钟主编.机电传动控制[M].华中科技大学出版社,2001年 【3】朱宏辉.物流自动化系统设计及应用.化学工业出版社,2004 【4】刘锴编著.深入浅出西门子S7-300PLC[M].北京航空航天大学出版社,2004年 【5】廖常初编著.S7-300/400PLC应用技术[M].机械工业出版社,2008年【6】王永华编.现代电器控制及PLC应用技术[M].北京航天航空大学出版社,2007年 指导教师签名: 2013年1月6日 系主任(或责任教师)签名: 2013年1月6日
机械制造装备设计第四章习题答案关慧贞
第四章工业机器人设计思考题与习题 1.工业机器人的定义是什么?操作机的定义是什么? 答:我国国家标准GT/T12643-1997《工业机器人词汇》将工业机器人定义为“是一种能自动控制、可重复编程、多功能、多自由度操作机,能搬运物料、工件或夹持工具,用以完成各种作业”;将操作机定义为“具有和人手臂相似的动作功能,可在空间抓放物体或进行其它操作的机械装置”。 2.工业机器人由哪几部分组成?并比较它与数控机床组成的区别。 答:工业机器人由操作机、驱动单元和控制装置组成。数控机床一般由机床本体、伺服系统和数控装置组成。二者组成的区别主要在于机械本体,机器人操作机通常由末端执行器、手腕、手臂和机座组成,而数控机床机械本体通常包含主运动部件、进给运动部件、支承部件、冷却润滑、排屑等部分。 3.工业机器人的基本功能和基本工作原理是什么?它与机床主要有何相同和不同之处? 答:工业机器人基本功能是提供作业所需的运动和动力,其基本工作原理是通过操作机上各运动构件的运动,自动地实现手部作业的动作功能及技术要求。 在基本功能及基本工作原理上,工业机器人与机床有如下相同之处:二者的末端执行器都有位姿变化要求;二者都是通过坐标运动来实现末端执行器的位姿变化要求。二者的主要不同之处有:机床是以直角坐标形式运
动为主,而机器人是以关节形式运动为主;机床对刚度、精度要求很高,其灵活性相对较低;而机器人对灵活性要求很高,其刚度、精度相对较低 4.工业机器人的结构类型有哪几类?各种类型的特点如何? 答:工业机器人的结构类型有如下四类: 关节型机器人,其特点是关节一般为回转运动副,灵活性好,工作空间范围大(同样占地面积情况下),但刚度和精度较低;球坐标型机器人,其特点是按球坐标形式动作(运动),灵活性好,工作空间范围大,但刚度、精度较差;圆柱坐标型机器人,其特点是按圆柱坐标形式动作,灵活性较好,工作空间范围较大,刚度、精度较好;直角坐标型机器人,其特点是按直角坐标形式动作,刚度和精度高,但灵活性差,工作空间范围小。 5.如何选择和确定机器人的坐标系?分析图4-5所示的PUMA机器人的坐标系是如何确定的? 答:坐标系按右手定则确定。绝对坐标系X-Y-Z,机座坐标系X0-Y0-Z0和机械接坐标系Xm-Ym-Zm的取法参考GB-T16977-1997《工业机器人坐标系和运动命名》。 关节坐标系Xi-Yi-Zi以下简明的方法确定: (1)确定基准状态—般可取机器人处于机械原点时的状态作为基准状态。也可以取机器人各关节轴线(或大部分关节轴线)与机座直角坐标系轴线平行时的状态作为基准状态。(2)关节坐标轴轴线位置的选取取Zi轴与i关节的运动方向一致。对于回转关节,取Zi轴与i关节的轴线重合;对于移动关节,取Zi轴与i关节的运动方向平行(或重合)。(3)关节坐标方向的选取采用右手坐标系,规定Xi、Zi轴的方向,Yi轴方向就自然确定了。原则上Xi、Zi轴的正向可视方便任意选取,但应尽可能使各坐标
5.2 闭环电子控制系统的设计与应用(1)
如图所示是JN6201集成电路鸡蛋孵化温度控制器电路图,根据该原理图完成1~3题。 1.该电路图作为控制系统的控制(处理)部分是IC JN6201,当JN6201集成输出9脚长时间处于高电平,三极管V2处于截止状态,继电器释放,电热丝通电加热。 2.安装好调试时,先将温度传感器Rt1放入37℃水中,调整电位器Rp1,使继电器触点J-2吸合,再将温度传感器Rt2放入39℃水中,调整Rp2,使继电器触点J-2释放。 3.调试时发现,不管电位器Rp1和Rp2怎么调,继电器J 始终吸合,检查电路元器件安装和接线都正确,用万用表测三极管V2集电极电位,在不同的调试状态分别为2.8V 和0V ,可知电路发生故障的原因是( B ) A.二极管V6内部断路 B.三极管V3内部击穿(短路) C.电阻R4与三极管V3基极虚焊 D.继电器线圈内部短路 如图所示是运算放大器鸡蛋孵化温度控制器电路图,根据该原理完成4~6题。 4.该电路作为控制系统的输出部分是继电器J 、电热丝等,当电路中集成运放2脚的电位低于3脚的电位,三极管V3处于饱和状态,继电器J 吸合,电热丝通电加热。 上限 V2饱和导通时候Uce 电压降0.2V ,所以留下来给集电极2.8V ,截止时候0V
5.安装好后调试时,将温度传感器Rt 放入39℃水中,调R4,使电压U2=U3,集成运放输出端6脚的电压为0V ,电路实现39℃单点温度控制。 6.调试时发现,将温度传感器Rt 放入高于39℃水中,继电器吸合;将温度传感器Rt 放入低于39℃水中,继电器释放,出现该故障现象的原因可能是( A ) A.集成运放2脚与3脚接反 B.二极管V4接反 C.电阻R2断路 D.三极管V3损坏 如图所示是晶体管组成的水箱闭环电子控制系统电路,根据该原理图完成7~9题。 7.该电路作为控制系统被控对象的是水箱内的水,水箱的水位从a 点降到b 点的过程中,三极管V1处于饱和状态,三极管V2处于截止状态,继电器触点J-1处于吸合状态。 8.安装调试时,将三个水位探头按图中的高低放入空玻璃杯中,如果电路正常,电路通电后,继电器J 吸合;向玻璃杯中加水,到达a 点时,继电器J 释放;接着将玻璃杯中的水排出,水位降到b 点以上时,继电器J 释放;水位降到b 点以下时,继电器J 吸合。 9.调试时发现,玻璃杯中的水位在b 点以下时,继电器J 就吸合;水位加到b 点,继电器J 就释放。出现该故障现象的原因是( D ) A.继电器J 没用 B.三极管V1损坏 C.二极管V3接反 D.电路没接J-1触点,b 点直接接到了电阻R1 如图所示是555集成电路组成的水箱水位闭环电子控制系统电路图, (第4~6题) (第7~9题) R4 10k ?R5 4.7k R3 4.7k
白车身生产线控制系统设计及实施
白车身生产线控制系统设计及实施 本文阐述了如何在工艺基础上实现对宝骏汽车白车身焊接生产线的生产控制系统进行硬件和软件设计.该 控制系统的最大特点在于电气控制和气动控制相结合,通过电气元件驱动气动的控制阀岛,达到气动控制自动化的目的. 本文阐述了如何在工艺基础上实现对宝骏汽车白车身焊接生产线的生产控制系统进行硬件和软件设计。该控制系统的最大特点在于电气控制和气动控制相结合,通过电气元件驱动气动的控制阀岛,达到气动控制自动化的目的。 宝骏白车身生产线工艺流程 宝骏白车身生产线主体由前车体、下车体、总拼、左右侧围、空中主夹具、机器人及顶盖分拼、空中输送自行小车和升降机构成。前车体即发动机舱生产线,发动机舱完成后,由空中输送自行小车送至下车体的1#工位,3台自行小车分别将前地板、后车架送至下车体1#工位,形成宝骏汽车的底板。在1#工位完成焊接后,输送机构由主气缸顶起,变频器控制输送电动机前进,到2#工位落下夹具夹紧,开始新一轮的焊接。焊接完成后操作人员同时按下工作完成按钮,输送机构再次顶起,如此循环动作,一直持续到最后一个工位。 总拼的第一个工位定义为转运拼台,通常在这个工位罕有电动或气动的控制,7#为顶盖添加和焊接工位,在这个工位采用FANUC的机械手进行自动焊接,同时在车身底边的区域采用伺 服自动焊进行焊接,经过后面几个拼台的补焊后,到达最后一个工位,白车身总成由升降机转移到涂装车间的入口等待喷涂。到此为止,车身车间的工艺制作完成。 本文在工艺基础上实现对宝骏汽车白车身焊接生产线的自动控制。该控制系统的最大特点在于电气控制和气动控制相结合,通过电气元件驱动气动的控制阀岛,达到气动控制自动化的目的。控制方式通过全自动以及半自动的方式实现,软、硬件也分别进行了设计,在硬件部分主要考虑了设备的选型,包括PLC的选择,总线选择的设计等,PLC的型号及容量是重点考虑内容;其次是现场总线的选择,现场总线不光要完成系统的要求,还要更好地避免工业现场的各种干扰,使各个模块之间的通信安全稳定。为了保证生产线的安全性,我们在每个工位配置了一定数量的传感器,包括光栅、激光扫描以及光幕等,全面保障了焊接工人的人身安全和生产线的安全运行。软件部分主要专注于根据工艺的要求进行程序代码的编写。
会计制度设计第一章至第四章练习题
会计制度设计(第一章) 1.由政府部门、企业单位通过一定程序制定的具有一定强制性的会计行为准则和规范是(C) A.会计法B.会计准则 C.会计制度D.会计程序 2.会计制度设计的制约性是指(D) A.会计制度设计必须符合国家法律、法规和政策的规定,并将其要求体现到会计制度中去B.会计制度设计的内容必须与国际惯例相协调 C.会计制度设计必须以提高经济效益为中心 D.会计制度设计既要规范会计核算,又要便于加强会计监督,健全内部控制制度 3.执行会计制度可以发挥的作用有(ABCDE) A.保证会计工作的正常进行B.保证会计及相关工作有序运转 C.保证会计工作质量的提高D.保证会计监控作用有效发挥 E.保证会计人员行使职权 4.设计会计制度最主要、最直接的依据是(BCD ) A.宪法B.会计法 C.企业会计准则D.统一会计制度 E.企业规章 5.下列关于会计制度总则的说法中,正确的有(ABDE) A.会计制度总则是指会计制度最前面的概括性的适用于会计工作各个环节的总的原则B.会计制度总则一般包括会计制度制定的前提、会计工作一般规定和会计基础工作的要求三部分内容 C.会计制度总则的特点是坚持统一性,不允许灵活性 D.会计制度总则的内容要求有较强的现实针对性 E.会计制度总则的内容应具有一定的适用性 6.会计制度设计的针对性原则是指( A ) A.针对单位的具体实际进行设计 B.针对国家的宏观要求进行设计 C.针对决策者的要求进行设计 D.针对国家的监管要求进行设计 7.由政府部门和企业单位对会计工作的规则、方法和程序所制定的规范性文件是指( C ) A.会计法 B.会计准则 C.会计制度 D.会计程序 8.确定会计制度的框架结构属于会计制度设计程序中的( B ) A.准备阶段 B.设计阶段 C.试行修正阶段 D.定稿颁布阶段 9.按会计制度本身的内容,《企业会计准则》利《会计档案管理办法》等制度属于(B )
基于PLC系统的电镀生产线控制系统毕业设计论文
基于PLC的电镀生产线控制系统设计 摘要 本文探讨了如何利用德国西门子PLC S7-200进行自动化电镀生产线控制,在本次设计中,我们从自动控制技术器件在国内的应用前景及电镀生产线生产现场的环境来考虑,以使该生产线真正具备自动生产运行为目的,制定了采用在当前及以后都应用广泛且能适应多种环境的可编程控制器来控制整个整个工作流程的方案。重点分析了系统软硬件设计部分,并给出了系统硬件接线图、PLC控制I/O 端口分配表以及整体程序流程图等,实现了电镀生产自动化,提高了生产效率,降低了劳动强度。为适应现代传统的工业控制系统,我们还采用了基于组态王软件的系统作为上位机,配合下位机PLC完成了该系统的实时监控系统功能,更好的使该自动生产系统融入到现代工业控制领域中。 关键词:PLC,电镀,组态王
Design of galvanization production line control system based on PLC ABSTRACT How did the article discuss has carried on the automated galvanization production line control using German Simens PLC S7-200, in this design, we produced the scene from the automatic control technology component in the domestic application prospect and the galvanization production line the environment to consider, take caused this production line truly to have the automatic production movement as the goal, will formulate has used in current and later all applies widespread also can adapt the many kinds of environment programmable controller to control the entire entire work flow the plan.Has analyzed the system software and hardware design part with emphasis, and gave the system hardware wiring diagram, PLC has controlled the I/O port distribution list as well as the overall program flow diagram and so on, has realized the galvanization production automation, enhanced the production efficiency, reduced the labor intensity.In order to adapt the modern tradition industry control system, we also used based on the configuration king software system had taken on the position machine, coordinate lower position machine PLC has completed this system real-time monitoring system function, better caused this automatic production system to integrate to the modern industry control domain in. KEY WORDS: PLC,Galvanization, Configuration King
物理性污染控制习题第四章答案
物理性污染控制习题答案 第四章电磁辐射污染及其防治 1.什么是电磁辐射污染电磁污染源可分为哪几类各有何特性 答:是指人类使用产生电磁辐射的器具而泄露的电磁能量流传播到室内外空间中,其量超出环境本底值,且其性质、频率、强度和持续时间等综合影响而引起周围人群的不适感,并使健康和生态环境受到损害。 电磁污染源可分为自然电磁场源,人工电磁场源二类 自然电磁场源分为 大气与空气污染源自然界的火花放电、雷电、台风、寒冷雪飘、火山喷烟 太阳电磁场源太阳的黑点活动与黑体放射 宇宙电磁场源银河系恒星的爆发、宇宙间电子移动 人工电磁场源分为 核爆炸对环境的污染 工业和核动力对环境的污染 核事故对环境的污染 其他辐射污染来源 放电所致场源电晕放电,电力线(送配电线)高电压、大电流而引起静电感应、电磁感应、大地漏泄电流所造成 辉光放电,放电管白炽灯、高压水银灯及其他放电管 弧光放电,开关、电气铁道、放电管点火系统、发电机、整流装置…… 火花放电,电气设备、发动机、冷藏车、汽车整流器、发电机、放电管、点火系统…… 工频感应场源,大功率输电线、电气设备、电气铁道、无线电发射机、雷达……高电压、大电流的电力线场、电气设备、广播、电视与通风设备的振荡与发射系统 射频辐射场源,高频加热设备、热合机、微波干燥机……工业用射频利用设备的工作电路与振荡系统 理疗机、治疗机医学用射频利用设备的工作电路与振荡系统 家用电器,微波炉、电脑、电磁灶、电热毯……功率源为主…… 移动通信设备,手机、对讲机天线为主…… 建筑物反射,高层楼群以及大的金属构件墙壁、钢筋、吊车…… 2.电力系统、电气化铁道、电磁发射系统、电磁冶炼和电磁加热设备产生电磁污染的机理及特性是什么试总结说明并加以比较。(演讲) 3.电磁波的传播途径有哪些 天然辐射源的正常照射,由于技术发展是天然辐射源的照射增加,消费品的辐射,核工业造成的辐射,核爆炸沉降物对人群造成的辐射,医疗照射。 4.电磁辐射评价包括哪些内容评价的具体方法有哪些 评价电磁辐射环境的指标 (1)关键居民组所接受的平均有效剂量当量 方法:在广大群体中选择从某一给定的实践中受到的照射剂量高于群体中其他成员组成特征组。 (2)集体剂量当量
啤酒生产线控制系统设计酿造部分
第一章绪论 1.1课题背景 在巩固和提高我国经济体制的同时,特别是加入了国际世贸组织以后,中国啤酒行业正逐步融入世界啤酒业,由于外国啤酒进驻中国市场,中国啤酒行业已经进入了竞争激烈的成熟过渡期,重新整合扩张,这种“一体化”的扩张方式在一些大中型企业是尤其明显的。上世纪90年代,青岛啤酒经营了多种运营模式,在中国大部分省市自治区成立了50多家啤酒自动化生产基地,已经初步完成了全国化的战略布局。 因为啤酒生产内部竞争激烈,外部也和同类酒类产品的竞争越来越激烈,有很大一部分啤酒厂倒闭或相互合并,啤酒生产企业数量急剧下降。还有一部分生存下来的企业,逐步重视对产品质量、口味、工艺,加大科技研发力度,自动化专业化设备得到全新的改变,新的包装设备和先进的宣传理念如雨后春笋般在市场上出现,整个啤酒行业更加良性的在市场中互相竞争,啤酒开始向着工业化、规模化生产,国内的大部分啤酒生产企业逐步的向大型化、集团化发展,与国际之间的交流越来越频繁。 现如今,人们的生活水平有了显著的提高,老百姓对啤酒的需求量急速上升,这一需求给生产制造商提出了严峻的挑战,尤其是在各个厂家良性竞争的前提下,更是对啤酒的生产有了更严格的要求,如何在保证质量的前提下高效的生产出大批量的啤酒是现在每个厂家所必须解决的问题。 正是因为PLC的强大功能,给啤酒的自动化生产带来了福音。啤酒生产所需要监测的数据比较繁琐,比如温度、压力、浓度、浑浊程度等都有很严格的要求,而PLC在这些方面都有自己的独特之处,能够很自如的对这些模拟量进行时时监控,从而解决了大量的剩余劳动力,而对PLC自动化啤酒生产线程序的调试优化更是尤其重要。 本次设计就是对现有的和利时PLC啤酒自动化生产线进行软、硬件的调试,通过现场的数据采集对啤酒生产线酿造部分进行程序优化,最终得出与之对应的研究结论。 1.2课题内容 (1)啤酒自动化生产酿造工艺流程通过查阅相关资料,对现有的啤酒自动化生产工艺有一个基本的了解,尤其是对啤酒酿造工艺的熟悉,从而对本课题有一个更深入的理解。 (2)根据现场实际需要设计适当的控制方法根据现场以及工艺流程的实际需要,编写控制程序并对控制程序进行相应的优化,以及对优化后的程序进行现场
技术与设计复习提纲第四章控制与设计
第四章控制与设计 一、控制的要素:、、。这三个也是理解控制现象必须弄明白的问题。 例题1、理解一个控制现象,要明确控制的对象是什么,控制要达到什么目的和采取什么控制手段。例如,射击比赛的射手通过瞄准目标,使子弹射中靶心,分析这个过程,其控制的对象是:() A、人 B、枪 C、子弹 D、靶 二、控制的类型: 1、从控制过程中人工干预的情形来分: ①(手动控制):(必须在人的直接干预下才能完成控制任务的控制系统。) 如人工纺纱、打开普通自来水龙头,揿按键打开电灯、驾驶汽车等; ②:(不需要人的干预,就可按期望规律或预定程序进行的控制系统。) 例题1、控制系统中属于自动控制系统的是() A、按钮开关控制 B、普通自来水龙头 C、花房恒温控制 D、汽车驾驶 2、从手摇扇到电风扇到空调器的发展过程来看,体现了() A、从机械控制到电子控制的过程 B、从手动到手动控制再到自动控制的过程 C、从手动到电动控制的过程 D、从自动到手动控制的过程 3、下列控制现象是自动控制的是() A、骑自行车 B、舂M C、农用灌溉抽水的控制 D、用气筒给自行车的轮胎充气 三、控制系统的组成 简单的控制系统由两部分组成,即和。其中控制装置,包括、控制器、等环节,对于闭环控制系统来说,还包括反馈环节和比较环节。还要了解简单控制系统的输入量、输出量、控制量、被控制量等。 四、控制系统的分类:开环控制与闭环控制 (一)开环控制系统(不将控制的结果反馈回来影响控制作用的系统) 1、:是指输出量不对系统的控制产生任何影响的控制系统。如十字路口的红绿灯定时控制系 统、楼宇的防盗报警控制系统、火灾自动报警系统、公园的音乐喷泉自动控制系统等。例题1、下列控制系统中,属于开环控制系统的是() A、电冰箱的温度控制 B、计算机的CPU上的风扇的转速控制 C、现代化农业温室的温度控制 D、电风扇调速开关系统 2、下列不属于开环控制系统的是:() A、自动门 B、自动声控灯 C、自动烘手机 D、电饭锅温控系统 2、特征:系统的输出量仅受输入量控制,输入量到输出量之间的信号是单向传递。 3、开环控制系统的方框图:输出量控制量输入量被控对象传感器控制器执行器 (1)输入量:控制系统的给定量,如游泳池进水的设定时间。 例题1、箱工作时温度设定在一定的范围值,当箱内温度变化超过设定的范围值时,热敏电阻的阻值也相应地变化,通过热敏电阻的变化电流经过三极管放大器的放大,带动继电器,控1 / 4 制压缩的启动,实现电冰箱的温度控制。温度的变化量是:()、被控量C、控制量CA、输入量B、输出量)输出量(被制量):控制系统所要控制的量,也就是说这个系统要控制的是什么量,也2(是控制系统的输出信号,如游泳池的水位。)1、投篮的过程中,被控量是:(例题、以上皆是 DC B、投篮的力度、角度、篮球的落点A、篮框的位置)控制量:执行器的输出信号,能对控制被控对象产生作用,从而被控量发生变化的量。3(如流过阀门的水量。、冰箱工作时温度设定在一定的范围值,当箱内温度变化超过设定的范围值时,热敏电1例题阻的阻
基于Arduino的一种电子显示屏控制系统设计剖析
《学术论文写作》课程论文 基于Arduino的一种电子显示屏控制 系统设计 姓名: 学院(系): 专业:自动化 班级: 学号:
基于arduino的一种简易电子显示屏设计 摘要:LED显示屏因其工作稳定可靠、寿命长、亮度高等优点,在许多场合中应用广泛。加强显示屏控制系统的可靠性研究意义重大。基于Arduino单片机,研究设计了一种新的电子显示屏控制系统。以PC机为上位机,向单片机发送显示代码和控制命令,单片机控制显示驱动模块驱动LED点阵显示屏进行扫描显示。PC机与单片机之间的通信采用ISP下载编程器来实现。利用按键模块通过单片机对显示屏的显示内容进行翻页和更新控制。 关键词:显示屏;可靠性;Arduino;控制 The Design of Electronic Display Control System based on Arduino Abstract: LED displays is widely used in many occasions because of its a dvantages such as stable, reliable and long life. It is of great significance to strengthen the research of the reliability of electronic display control system. Here introduces a new kind of el ectronic display control system based on Arduino microcontroller. System uses PC as uppe r computer.PC send control commands and display code it has stored to the Arduino microcontr oller. And arduino microcontroller receives and deals with control command and display cod e which are from PC. Then drives scan display o f the display screen. Communication betwee n PC and the microcomputer can be implemented by using ISP download programmer. At last, page and update the content which is displayed of the billboard by using the key module an d all is based on th e single chip microcomputer. Keywords: electronic display; reliability; Arduino microcontroller 1.系统整体设计 本系统硬件的设计采用模块化设计,既能满足模块本身功能又要能够和整个系统兼容,如图1.1所示。系统硬件由Arduino控制系统,显示扫描电路,显示屏,键盘扫描电路及数据传输部分以及上位机六部分组成。上位机通过数据传输部分向MCU系统发送显示代码和控制命令,MCU系统执行显示命令并将显示代码处理后控制显示部分的显示内容和显示方式。
基于PLC的生产流水线控制系统设计毕业设计论文报告
毕业设计(论文)报 告 题目基于PLC的生产流水线控制系统设计
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
给料生产线控制系统设计
课程设计任务书 (指导教师填写) 课程设计名称 电器控制 设计题目 给料生产线PC -PLC 控制系统设计 一、课程设计目的 通过对给料生产线PC -PLC 控制系统的工作原理的分析、系统设计、编程、及上机调试工作的实践,了解电器控制系统的一般设计思路,熟悉和掌握外围电路系统和软件设计的方法,并掌握利用PC 对PLC 工作状况进行监控的方法。 二、设计内容、技术条件和要求 (一)技术要求 本生产线由9台电机控制,分别是主风机1台,反吹风机2台,螺旋输送器2台,星型给料器2台,回旋臂2台。 控制要求如下: 1、控制方式可采用手动和自动两种方式; 2、手动方式下,可对每个电机进行启、停控制; 3、自动方式下, 1)启动顺序及工作顺序如下: 反吹风机工作螺旋输送器工作星型给料器工作主风机降压启动延时5s 延时5s 延时5s 回旋臂工作 主风机工作延时20s 延时10s 延时30s 回旋臂停止延时15s 2)按下自动停止按钮,各电机按以下顺序停止: 主风机 停止 回旋臂停止 螺旋输出 器停止 星型给料器停止延时10s 延时10s 延时10s 反吹风机停止延时10s 4、主风机采用自耦变压器降压启动,启动时间延时为20s ; 5、为防止自耦变压器频繁启动,其停止后5分钟之内不允许再次启动。
(二)设计内容 1、设计各电机主电路; 2、设计PLC的I/O分配; 3、设计PLC的外部接线; 4、设计PLC控制程序(梯形图); 5、设计MCGS组态程序,对系统的运行情况进行监控; 6、上机调试(含答辩); 7、撰写设计说明书。 (三)设计说明书要求 设计说明书应包含以下内容: 1、设计目的; 2、控制要求; 3、各电机主电路; 4、PLC的选型; 5、PLC的I/O分配; 6、PLC的外部接线; 7、PLC控制程序梯形图; 8、MCGS组态程序设计说明; 9、调试结果、调试中出现的问题及解决方法; 10、设计心得体会; 11、参考文献。 三、时间进度安排 2010.6.12—6.17 查阅资料,进行系统设计,设计控制程序; 2010.6.18—6.21 上机调试; 2010.6.22—6.25 考核; 2010.6.26 — 6.27 完成设计说明书。
第四章控制与设计
控制与设计 一、考点 (1)了解控制的含义及其在生产和生活中的应用。 (2)通过典型的案例了解手动控制、自动控制,了解简单的开环控制系统和闭环控制系统的基本组成和简单的工作过程。 (3)能识别简单的闭环控制系统的方框图,了解其中的控制器、执行器等环节的作用,了解反馈环节的作用。 (4)了解影响简单控制系统运行的主要干扰因素。 (5)了解简单的被控制对象的基本特性,了解被控量、控制量。 二、知识点 1、控制:人们根据自己的目的,通过一定的手段,使事物沿着某一确定的方向发展就形成了控制。 控制技术的广泛应用,提高了产品质量,降低了生产成本,增长了劳动生产率,使人们从繁重或危险的体力劳动和重复的手工操作中解放出来。 2、手动控制:控制过程是在人的直接干预和全程干预下进行的。 自动控制:指在无人直接参与的情况下,事物的变化准确地按照期望的方向进行。 3、控制系统的输出量不对系统控制产生任何影响,这种控制称为开环控制系统系统的输出量返回到输入端并对控制过程产生影响的控制系统是闭环控制系统 4、干扰因素:在控制系统中,除输入量(给定值)以外,引起被控量变化的各种因素成为干扰因素。控制系统中,干扰因素可能有一个,也可能有若干个,有的是人为的,有的是由于环境造成的。 5、在正常工作状态下,其输出与输入之间的关系,输出与干扰之间的关系称为被控对象的基本特性。 被控量:就是输出量;通过控制量来实现对被控量的控制。 三、例题 1、如图所示为某种抽水马桶水箱的结构示意图:浮球和连杆用螺纹连接,通过调节连杆长度来设置给定水位,当水位上升到给定水 位时,浮球带动连杆装置关闭进水阀。如果往进水阀 方向调节浮球,缩短连杆长度,那么产生的后果是 A.降低给定水位高度 B.增加给定水位高度 C.不影响给定水位高度 D.降低实际水位高度
基于PLC的装配流水线控制系统设计
基于P L C的装配流水线的控制系统设计 摘要 随着微电子技术和计算机技术的不断发展,PLC在处理速度、控制功能、通信能力及控制领域成为工业自动化领域中最重要、应用最广泛的控制设备之一,并已成为现代工业生产自动化的重要支柱。 对装配流水线的控制进行了分析设计,该系统主要引入了PLC编程控制器的控制方式,实现了对装配流水线的工作状态的在线监测和系统自动控制。设计的控制系统具有较高的实用性,能够进行启动、移位、复位工作,较好地达 到预期目标。 本次设计是装配流水线控制的模拟,主要是模拟流水线上产品所经加工过程的控制和生动的表示。模拟主要流水线有四个操作过程(包括入库),传输带用四段指示灯表示,以指示灯的明暗来显示产品在运输这一状态。分析控制对象我们选择用移位寄存器控制来实现控制目的,每隔5秒寄存器移位一次,从 而控制相应操作的执行。 关键词:装配流水线,PLC,控制系统
DESIGN OF CONTROL SYSTEM OF ASSEMBLY LINE BASED ON PLC ABSTRACT With the development of the microelectronics technology and computer technology, PLC in processing speed, control function, communication ability and control fields have new breakthrough. Become one of the most important control equipment in the field of industrial automation, the most widely used, and has become an important pillar of the modern industrial production automation. Control of the assembly line are analyzed and designed, the system is mainly introduced PLC control programming controller, realized the on-line monitoring system of assembly line and the working state of automatic control. Practical design of the control system has high, can start, shift work, reset, can reach the expected goal. The design is simulated assembly line controle, simulation is the main line of products through the control of process and the vivid representation. Simulation of main line is four operations (including storage), transmission belt with four indicates, to display the products in the transportation of this state to light shade. Analysis of the control object we choose to use the shift register control to achieve the control objective, every 5 seconds of shift register once, so as to control the corresponding operations. KEY WORDS: assembling line, plc, the control system
控制与设计练习题(带答案)
控制与设计练习题 选择题: 1.在下列4个控制系统中,属于闭环控制系统的是 ( C ) A. 电风扇转速控制 B. 公共汽车车门开关系统 C. 家用空调温度调节系统 D. 电风扇机械定时控制 2.比较闭环控制系统和开环控制系统,下列说法错误..的是(D ) A .开环控制系统的控制精度相对较低B .开环控制系统无反馈环节 C .闭环控制系统的抗干扰能力强 D .闭环控制系统和开环控制系统都有比较器 3. 自行车的刹车控制是属于( A ) A 、机械控制 B 、气动控制 C 、液压控制 D 、电子控制 4.下列控制系统 中 , 属 于 开环控制系统的是( D ) A . 电 冰 箱 的温 度 控 制 B . 计 算 机 的 CPU 上 的 风扇 的 转 速 控 制 C .现代化农业温室的温度控制 D .红绿灯定时控制系统 5. 小明发现学校路灯有时由于没有及时关闭而浪费用电,为此他设计了一个控制方案,能够在天亮时关闭,天暗后打开。该系统应该属于( B )。 A 、 自 动 控 制 的 闭 环 控 制 系 统 B 、 自 动 控 制的 开 环 控 制 系 统 C 、手动控制的闭环控制系统 D 、手动控制的开环控制系统 6. 根植于历史文化名城泉州的提线木偶戏古称“悬线傀儡”,又名“丝戏”,民间俗称“嘉礼”,为流行于闽南语系地区的古老珍稀戏种,在提线木偶的控制过程中控制对象是( C ) A 、手 B 、提绳 C 、木偶 D 、大脑 7. 我们理解一个控制现象,要明确控制的对象是什么,控制要达到什么目的和采取什么手段。射击比赛的射手通过瞄准目标,使子弹射中靶心,分析这个过程,其控制的对象是( B ) A 、人 B 、枪 C 、子弹 D 、靶 8. 开环控制系统由下列各个环节组成( A ) ①控制器 ②执行器 ③被控对象 ④检测装置 A 、①②③ B 、①③④ C 、①②③④ D 、①②④ 9. 卖西瓜摊主通过看、听、拍等来判断西瓜的生熟,他采用的方法是( B ) A 、功能模拟法 B 、黑箱方法 C 、功能法 D 、模拟法 10. 控制系统中,将输出量通过适当的检测装置返回到输入端并与输入进行比较的过程,称为(A ) A 、反馈 B 、干扰 C 、控制 D 、闭环控制 11. 机器人从本质上来说是一种( C ) A 、虚拟法 B 、模拟法 C 、功能模拟法 D 、黑箱方法 12.按时间顺序进行控制的“交通路口红绿灯控制系统”的方“图如下。此方框图中,被控对象是( B )。 A .控制电路 B .红绿灯 C .开关装置 D .红绿灯的开关状态 13.理解一个控制现象,要明确控制的对象是什么,控制要达到什么目的和采取什么控制手段。例如,导弹控制系统控制的是导弹与目标之间的距离,目的是要击中目标(距离为零),分析这个控制系统,其控制的对象是:( D )。 A.人 B.目标 C.计算机 D.导弹 14.自行车刹车控制过程如下:刹车时,施加一定的握把力,通过杠杆系统,使刹车片压紧车圈(或轮轴),车轮减速。刹车握紧力与车轮转速一一对应。这是一个开环控制系统,其方框图如下。 在这个控制系统中执行器是(C ) A .握把 B .杠杆系统 C .刹车片 D .车轮 15.在国际象棋的人机对弈中,计算机具有与人脑类似的计算和判断功能,能模拟棋手的思维与人下棋.这是( A )的一种具体应用。 A.功能模拟法 B.黑箱方法 C.反馈方法 D.控制方法 16.在电冰箱温度控制中不属于干扰因素的是( C ) A 、打开冰箱门 B 、把食物放到冰箱内 C 、电压下降2伏 D 、房间温度变化很大 设定时序(间信号)