第二章应力状态 弹塑性力学基本理论及应用_刘土光
第二章 应力状态理论
2.1 应力和应力张量
在外力作用下,物体将产生应力和变形,即物体中诸元素之间的相对位置发生变化,由于这种变化,便产生了企图恢复其初始状态的附加相互作用力。用以描述物体在受力后任何部位的内力和变形的力学量是应力和应变。本章将讨论应力矢量和某一点处的应力状态。
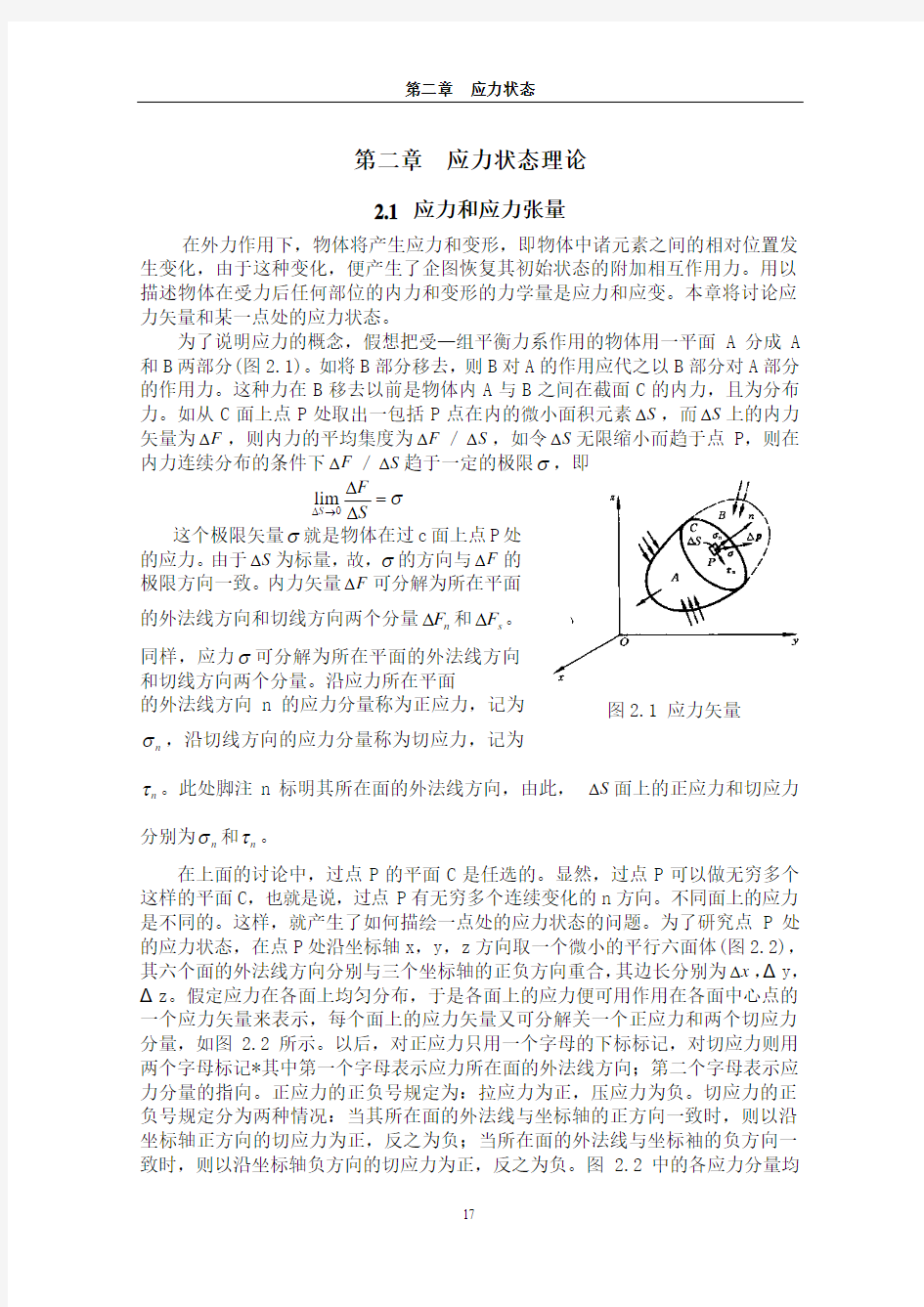
为了说明应力的概念,假想把受—组平衡力系作用的物体用一平面A 分成A 和B 两部分(图2.1)。如将B 部分移去,则B 对A 的作用应代之以B 部分对A 部分的作用力。这种力在B 移去以前是物体内A 与B 之间在截面C 的内力,且为分布力。如从C 面上点P 处取出一包括P 点在内的微小面积元素S ?,而S ?上的内力矢量为F ?,则内力的平均集度为F ?/S ?,如令S ?无限缩小而趋于点P ,则在内力连续分布的条件下F ?/S ?趋于一定的极限σ,即 σ=??→?S
F S 0lim 这个极限矢量σ就是物体在过c 面上点P 处
的应力。由于S ?为标量,故,σ的方向与F ?的
极限方向一致。内力矢量F ?可分解为所在平面
的外法线方向和切线方向两个分量n F ?和s F ?。
同样,应力σ可分解为所在平面的外法线方向
和切线方向两个分量。沿应力所在平面
的外法线方向n 的应力分量称为正应力,记为n σ,沿切线方向的应力分量称为切应力,记为
n τ。此处脚注n 标明其所在面的外法线方向,由此, S ?面上的正应力和切应力分别为n σ和n τ。
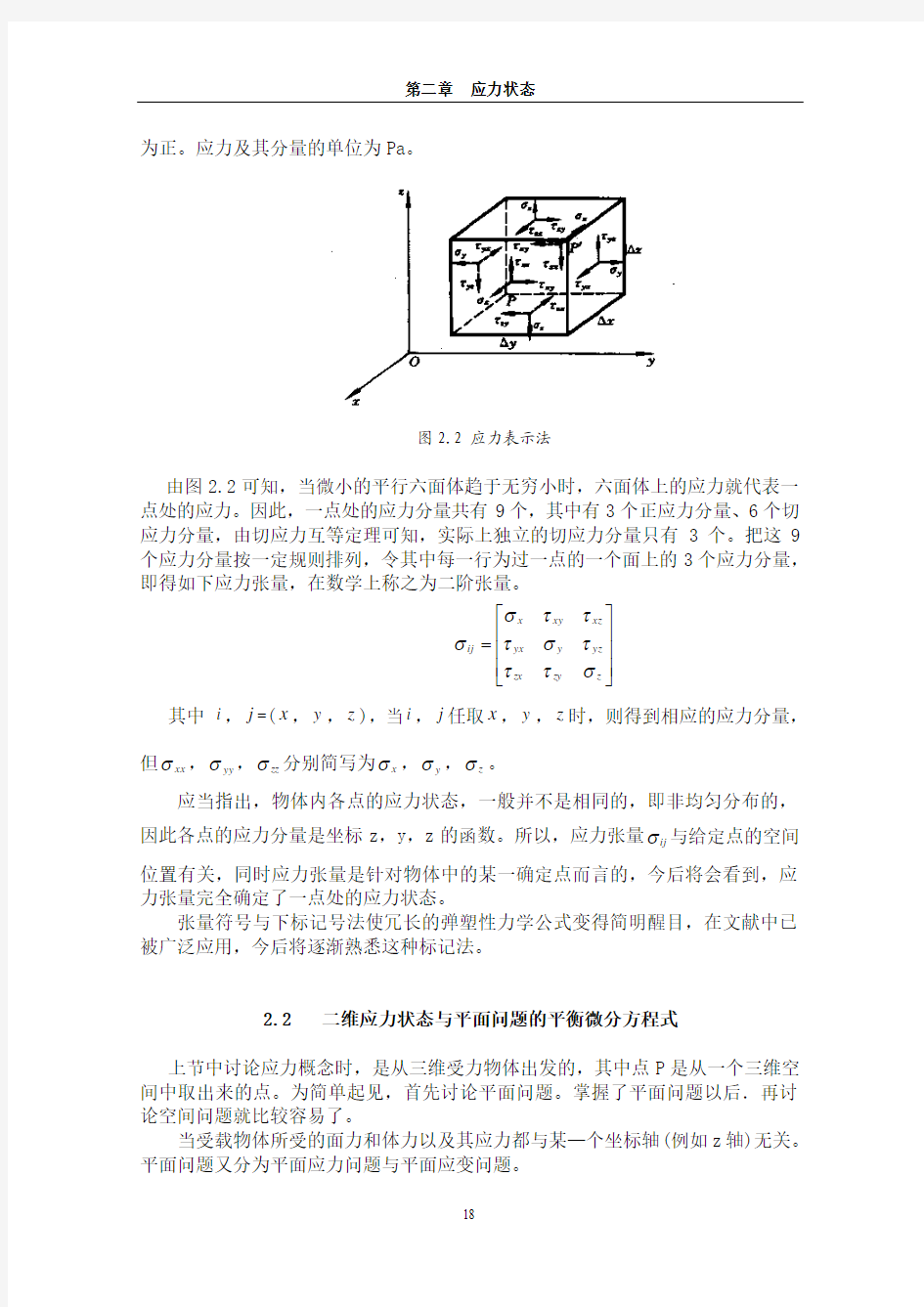
在上面的讨论中,过点P 的平面C 是任选的。显然,过点P 可以做无穷多个这样的平面C ,也就是说,过点P 有无穷多个连续变化的n 方向。不同面上的应力是不同的。这样,就产生了如何描绘一点处的应力状态的问题。为了研究点P 处的应力状态,在点P 处沿坐标轴x ,y ,z 方向取一个微小的平行六面体(图2.2),其六个面的外法线方向分别与三个坐标轴的正负方向重合,其边长分别为x ?,Δy ,Δz 。假定应力在各面上均匀分布,于是各面上的应力便可用作用在各面中心点的一个应力矢量来表示,每个面上的应力矢量又可分解关一个正应力和两个切应力分量,如图2.2所示。以后,对正应力只用一个字母的下标标记,对切应力则用两个字母标记*其中第一个字母表示应力所在面的外法线方向;第二个字母表示应力分量的指向。正应力的正负号规定为:拉应力为正,压应力为负。切应力的正负号规定分为两种情况:当其所在面的外法线与坐标轴的正方向一致时,则以沿坐标轴正方向的切应力为正,反之为负;当所在面的外法线与坐标袖的负方向一致时,则以沿坐标轴负方向的切应力为正,反之为负。图2.2中的各应力分量均 图2.1 应力矢量
为正。应力及其分量的单位为Pa 。
图2.2 应力表示法
由图2.2可知,当微小的平行六面体趋于无穷小时,六面体上的应力就代表一点处的应力。因此,一点处的应力分量共有9个,其中有3个正应力分量、6个切应力分量,由切应力互等定理可知,实际上独立的切应力分量只有3个。把这9个应力分量按一定规则排列,令其中每一行为过一点的一个面上的3个应力分量,即得如下应力张量,在数学上称之为二阶张量。
????
??????=z zy zx yz y yx xz xy x ij στττστττσσ
其中 i ,j =(x ,y ,z ),当i ,j 任取x ,y ,z 时,则得到相应的应力分量,但xx σ,yy σ,zz σ分别简写为x σ,y σ,z σ。
应当指出,物体内各点的应力状态,一般并不是相同的,即非均匀分布的,
因此各点的应力分量是坐标z ,y ,z 的函数。所以,应力张量ij σ与给定点的空间位置有关,同时应力张量是针对物体中的某一确定点而言的,今后将会看到,应力张量完全确定了一点处的应力状态。
张量符号与下标记号法使冗长的弹塑性力学公式变得简明醒目,在文献中已被广泛应用,今后将逐渐熟悉这种标记法。
2.2 二维应力状态与平面问题的平衡微分方程式
上节中讨论应力概念时,是从三维受力物体出发的,其中点P 是从一个三维空间中取出来的点。为简单起见,首先讨论平面问题。掌握了平面问题以后.再讨论空间问题就比较容易了。
当受载物体所受的面力和体力以及其应力都与某—个坐标轴(例如z 轴)无关。平面问题又分为平面应力问题与平面应变问题。
1. 平面应力问题
如果考虑如图2.3所示物体是一个很薄的
平板,荷载只作用在板边,且平行于板面,即
xy 平面,z 方向的体力分量Z 及面力分量z F 均
为零,则板面上(2/δ±=z 处)应力分量为 0)(2
=±=δσz z 0)()(22==±=±=δ
δ
ττz zy z zx
因板的厚度很小,外荷载又沿厚度均匀分布,
所以可以近似地认为应力沿厚度均匀分布。由此,
在垂直于z 轴的任一微小面积上均有
0=z σ, 0==zy zx ττ 图2.3 平面应力问题 根据切应力互等定理,即应力张量的对称性,必然有0==xz yx ττ。因而对于平面应力状态的应力张量为
????
??????=00000y
yx xy
x ij σττσσ
也可写为
??????=y yx
xy x ij σττσσ 如果z 方向的尺寸为有限量,仍假设0=z σ,0==zy zx ττ,且认为x σ,y σ和xy τ(yx τ)为沿厚度的平均值,则这类问题称为广义平面应力问题。
2. 平面应变问题
如果物体纵轴方向(oz 坐标方向)的尺寸很长,外荷载及体力为沿z 轴均匀分布地作用在垂直于oz 方向,如图2.4所示的水坝是这类问题的典型例子。忽略端部效应,则因外载沿z 轴方向为一常数,因而可以认为,沿纵轴方向各点的位移与所在z 方向的位置无关,即z 方向各点的位移均相同。令
u 、v 、w 分别表示一点在x 、y 、z 坐标方向的位移
分量,则有w 为常数。等于常数的位移w 并不伴随产
生任一xy 平面的翘曲变形,故研究应力、应变问题时,
可取0=w 。此外,由于物体的变形只在xy 平面内产生,
因此w 与z 无关。故对于平面应变状态有
图2.4 平面应变问题
??
???===0),(),(w y x v v y x u u
由对称条件可知,在xy 平面内)(zx xz ττ和)(zy yz ττ
恒等于零,但因z 方向对变形的约束,故z σ一般并不
为零,所以其应力张量为
????
??????=z y
yx xy
x ij σσττσσ0000
实际上z σ并不是独立变量,它可通过x σ和y σ求得,因此不管是平面应变问题还是平面应力问题,独立的应力分量仅有3个,即x σ、y σ和xy τ(=yx τ),对于平面应变问题的求解,可不考虑z σ。
三. 平衡微分方程
物体在外力作用下处于平衡状态时,由各点应力分量与体力分量之间的关系所导出的方程称为平衡微分方程。如图2.5a)所示的平面应力问题,除面力外,在这个微单元体上还有体力的作用.单位体积的体力在二个坐标轴上的投影为Y X ,.而固体的质量密度为ρ。自弹性体内任一点P 处附近截取一单元体,
a) b)
图2.5 平面应力状态微元体的应力
它在x ,y 方向的尺寸分别为dx 和dy 。为了计算方便,在z 方向取单位长度,如图2.5b)所示。该单元体受有其相邻部分对它作用的应力和单元体的体力。由于在一般情况下应力分量是位置坐标的函数,因此在单元体左、右或上、下两对面上的应力不相等,而具有一微小的增量。若作用于ab 上的正应力和剪应力分别为x σ,则作用于cd 面上的正应力应随之变化。该变化可根据Taylor 级数展开,即
),(022dy dx dy y dx x ab
x ab x ab x cd x +??+
??+=σσσσ 由于ab,cd 线元上的应力分量均可用相应线元中点处的应力分量表示,以及略去二阶以上的微量后,由上式得cd 边上的正应力为 dx x
x x ??+σσ 同理,如ab 边上的切应力为xy τ,ad 边上的正应力和切应力分别为y σ,yx τ可
得cd 边上的切应力及bc 边的应力分量可类推分别得 dx x xy
xy ??+ττ dy
y dy y
yx
yx y y ??+??+
ττσσ 微单元体在面力及体力作用下处于平衡,必须满足静力平衡的三个方程式。如果考虑到质点运动,而按照牛顿第二定律,方程式的右边还应包括这个微单元体的质量与加速度在该坐标轴上的投影的乘积(即惯性力的投影)。
对于所研究的一点P 。,设其位移在坐标铀y x ,上的投影分别为v u ,,加速度的
投影可分别写为: 22t u ??, 22t
v ?? 若弹性体处于平衡状态,则取自物体内的单元体也必处于平衡状态。因而,根据
0=∑x F )(2dxdy t u ??=ρ,有 (dx x x x ??+σσ)0)(=+-??++-Xdxdy dx dx y
dy dy yx yx yx x τττσ)(2dxdy t u ??=ρ 将上式化简,并等式两边同除以dxdy ,可得 0=+??+??X y
x xy x τσ()22t u ??=ρ (2.2-1a) 由平衡方程式0=∑y F )22t
v ??=ρ,可类似导得
0=+??+??Y y x y
yx στ()22t v ??=ρ (2.2-1b) 根据平衡方程0=∑a m 得
0222)(2)(2)(2)(2222=-+??-??+-??+??++??-??dy Xdxdy dx Ydxdy dx dxdy t
v dxdy dy y dy dxdy t u dydx dx x dy dydx x dx dydx y yx yx xy xy x y
ρττρττσσ 略去三阶微量的项,得
yx xy ττ=
这就是前面曾提到的切应力互等定理。下面不再区分xy τ和yx τ。
式(2.2-1)为平面应力问题的平衡微分方程式,它表明了应力分量的变化与已知体力分量之间的关系;当改为括号内的项,就代表运动方程式,又称为柯西 (Chuchy )平衡运动微分方程。
式(2.2-1)是以平面应力为例导出的,对于平面应变问题,在图2.5(b)所示的
单元体上,一般在前、后两个面上还作用有正应力z σ,但由于它们自成平衡,不影响方程的建立,因而,式(2.2-1)对两种平面问题都适用。在建立上述方程时,我们是按照1.2节的小变形中假没,用物体变形以前的尺寸,而没有用变形后平衡状态下的尺寸。在以后建立任何平衡力程式时,都将作同样的处理,不再加以说明。
对于三维应力状态的情况,可从受力物体中取出一微小六面体单元,可类似
平面问题导出
zx xz ττ= , zy yz ττ=
以及 ????
???????==+??+??+????==+??+??+????==+??+??+??)(0)(0)(0222222t w Z z y x t v Y z y x t u X z y x z zy zx yz y yx xz xy x ρσττρτστρττσ (2.2-2) 式(2.2-2)为三维情况下的平衡微分方程。
如果采用张量符号和下标记号法,切应力互等定理可缩写为
ji ij ττ= (z y x j i ,,,=)
由此可知,应力张量为一对称张量,一共有6个独立元素
????
????
??=z yz y xz xy x ij 对称στσττσσ)( 平衡方程也可缩写为
0,=+i j ij G σ (2.2-3) 其中j ij ,σ表示),,,(z y x j i ij =σ对),,(z y x j =取偏导数,而i G 当z y x i ,,=时,则分别代表Z Y X ,,。因此,0,=j ij σ,则代表 ????
?????=??+??+??=??+??+??=??+??+??000z y x z y x z y x z zy zx yz y yx xz xy x στττστττσ (2.2-4) 式(2.2-4)即是不计体力时们三维平衡微分方程式。
一点的应力状态
所谓一点的应力状态是指受力变形物体内一点的不同截面上的应力变化的状况。现以平面问题为例说明一点处应力状态。在受力物体中取一个如图2.6所示的微小三角形单元,,其中AC ,AB 与坐标轴y x ,重合,而BC 的外法线与z z 轴成θ角。取坐标'',y x ,使BC 的外法线方向与'x 方向重合(如图2.6)。如果xy y x τσσ,,已知,则BC 面上的正应力'x σ,和切应力''y x τ可用已知量表示。因θ角的任意性,
若BC 面趋于点
A 时,则可认为求得了描绘过点4处的应力状态的表达式。
实际上,这里所讨论的问题是一点处不同方向的面上的应
力的转换,即BC 面无限趋于点A 时,该面上的应力如何
用与原坐标相平行的面上的应力来表示。在这种问题的分
析中,可不必引入应力增量和体力,因为它们与应力相比
属于小量。
假定BC 的面积为1,则AB 和AC 的面积分别为
θcos 与θsin 。于是,由力在坐标y x ,的平衡条件 图2.6 一点的应力状态
0=∑x F 和0=∑y F ,
可得 θσθτθ
τθσsin cos sin cos y xy y xy x x p p +=+= (a)
式中y x p p ,为BC 面上单位面积的力p 在坐标轴y x ,方向上的分力(图 2.6)。将y x p p ,投影到'',y x 坐标轴方向,有
θθτθθσsin cos sin cos '''
y x y x y x x p p p p -=+= (b)
将式(b)代入式(a),并注意到 θθ2cos 1cos 22+=,θθ2cos 1sin 22-=,θθθ2cos sin cos 22=-和θθθ2sin cos sin 2=,可得 θτθσσσσσ2sin 2cos 22'xy y
x y x x +-++= (2.3-1a) θτθσστ2cos 2sin 2''xy y x y x +--= (2.3-1b) 将式(2.3-1a)中的θ换成2πθ+
,则得 θτθσσσσσ2sin 2cos 22'xy y
x y x y ---+= (2.3-1c)
如果BC 面趋近于A 点,且已知A 点的应力分量xy y x τσσ,,时,则由式(2.3-1)
可求得过该点任意方向的平面上的应力分量。因此,对于平面问题,式(2.3-1)描述了该点的应力分布规律,即描述了该点的应力状态。
对于三向应力状态,可以采用类似于二维应力状态分析的方法。现在研究从受力物体中取出的任一无穷小的四面体(图2.7)。斜面ABC 的法线N 与坐标轴间的夹角的方向余弦分别是l 、m 、n 。四
面体棱边的长度分别dx 、dy 和dz 。设斜
面的面积为1,则三角形OBC 、OAC 、
OAB 的面积分别为
n
z N m y N l
x N =?=?=?),cos(1),cos(1),cos(1
如果ABC 面上单位面积上的力为p ,沿坐标
轴方向的分量z y x p p p ,,可由傲小四面体单元
图2.7 四面体的应力分布
的平衡条件得到
??
???++=++=++=n m l p n m l p n m l p z zy zx z yz y yx y xz xy x x στττστττσ (2.3-2)
式(2.3-2)是与坐标轴呈任意倾斜面止单位面积上的面力,该式也可按下标
记号法和求和约定缩写为
j ij i n p σ= (z y x j i ,,,=) (2.3-3) 式中j n 为斜面ABC 外法线n 与),,(z y x j =轴间夹角的方向余弦l 、m 、n 。
为了分析一点处应力的某些特征,现将坐标系oxyz 变换到新坐标系'''z y ox ,且新坐标系的'ox 轴与图 2.7中的法线方向n 重合,新旧坐标系间的方向余弦
,n ,z x ,m ,y x ,l x x 1'1'1')cos()cos(),cos(===…,
如表2.1所示,则'x 方向的正应力'
x σ为 'x σ=111n p m p l p z y x ++
将(2.3-2)代入上式,并注意到l 、m 、n 分别等于111,n ,m l ,则得
'x σ=)(2111111212121l n n m m l n m l xz yz xy z y x τττσσσ+++++
类似地将z y x p p p ,,在'',z y 方向投影,可得到
'y σ=)(2222222222222l n n m m l n m l xz yz xy z y x τττσσσ+++++
'z σ=)(2333333232323l n n m m l n m l xz yz xy z y x τττσσσ+++++
)()()(122112211221212121'
'n l n l n m n m m l m l n n m m l l zx yz xy z y x y x ++++++++=τττσσστ )()()(233223322332323232'
'n l n l n m n m m l m l n n m m l l zx yz xy z y x z y ++++++++=τττσσστ
)()()(311331133113131313''n l n l n m n m m l m l n n m m l l zx yz xy z y x x z ++++++++=τττσσστ 采用张量的方法,可将以上各式统一表示为
ij j j i i j i l l σσ''''= (2.3-4)
式(2.3-4)则是ij σ在坐标变换时所遵循的法则。凡是一组9个量ij σ,在坐标变换时遵从式(2.3-4)的法则就称为二阶张量。
2.4边界条件
当物体处于平衡状态时,除物体内部各点要满足平衡微分方程式(2.2-4)外,还应满走解条件。定解条件一般包括初始条件、边界条件或其它能确定唯一解答的补充条件。对于弹塑性静力学问题,定解条件主要是边界条件,所以弹塑性力学问题也就是数学物理方程中的边值问题。其它如约束条件、位移单值条件等也是常遇到的定解条件。
在弹塑性力学中,给定面力的边界,用σS 表示,结定位移的过界,用u S 表示,如图2.8所示。本节主要讨论弹塑性力学平面问题的边界条件。
a) b)
图2.8 平面问题边界条件
1. 位移边界条件
所谓位移边界条件,就是在给定位移的边界上,物体的位移分量必须等于边界
上的已知位移。
设平面弹塑性体在u S 边界上给定x 、y 方向上的位移分别为_u 和_
v ;,它们是
边界坐标的已知函数;而位移分量u 、v 则是坐标的待求函数。当把它们代入u S 边界的坐标时,则必等于该点所给定的位移,即
_u u =, _v v = 在u S (2.4-1)
对于三维问题,在u S 边界的位移边界条件为
_i i u u = (2.4-2)
此处),,(z y x i =,且对应于u 、v 、w 。
2. 应力边界条件
弹塑性体在外力作用下,处于平衡状态的条件,除物体内部各点的应力分量应满足平衡方程式(2.2-4)外,物体边界上各点也必须都是平衡的。由后者将导出应力边界条件。所谓应力边界条件就是在给定面力σS 的边界上应力分量与面力分量之间的关系。实质上,它是弹塑性体内部各点的平衡条件在其边界上的延续。因此,应力边界条件就是物体边界上点的平衡条件。
设平面弹性体在σS 上给定面力_X 、_Y ,它们是边界坐标的已知函数;而应力分量x σ、y σ、z σ则是坐标的待求函数。它们之间的关系可由边界上微元体的平衡条件求出。不失一般性,在物体的边界上取一微元体(一般取为三角形微元,因为它可以描述任意曲线边界).如图2.8b)所示,它在平面问题中显然是三角板(平面应力)或三棱柱(平面应变)。
若令微元体边界面外法线N 与x 轴和y 轴夹角的方向余弦分别为l x N =),cos(,m y N =),cos(;斜边长为ds ,两直角边长分别为dx 和dy ,微元体的厚度仍取为1,则由图2.18b),根据力的平衡条件有
?????
=+=+__Y m l X m l y xy xy x σττσ (2.4-3)
如当边界平行于x 轴时,有1,0±==m l 。这时,式(2.2-7)则为
_Y y ±=σ, _X xy ±=τ (在σS 边界上) (a)
而当边界平行y 轴时,有0,1=±=m l 。这时,式(2.2-7)则为
_X x ±=σ, _
Y xy ±=τ (在σS 边界上) (b) 由此可见,当物体的边界线与某一坐标轴平行(或垂直)时,应力边界条件变得十分简单,即应力分量的边界值就等于对应的面力分量,应力分量的符号取决于边界面的外法线方向。当边界面的外法线方向与坐标正向一致时,等式右边取正号,否则取负号。但应注意,面力本身还有正负号。其规定与应力符号法则相同。
对于三维问题,由力的平衡条件可得 ??
?????=++=++=++___Z n m l Y n m l X n m l z yz xz yz y xy xz xy x στττστττσ (2.4-4)
需要指出的是:在垂直x 轴的边界面上,应力边界条件中不出现y σ,而在垂直y 轴的边界上不出现x σ。当作用在边界面上的面力不连续时,应分段或展开成级数写出其边界条件;没有给定位移的自由边界,实际上是给定面力为零的应力边界,不能遗漏。
3.混合边界条件
在一般情况下,若用S 表示整个物体的表面积,则往往在其中一部分面积σS 上给出了面力,而在另一部分面积u S 上给定的是位移。如图2.9所示悬臂梁,固定端部分属于u S 部分,它给定位移而末给定外力;其余边界均属σS 部分,它的外力已给定 (包括外力等于零的部分)。显然,在u S 上各点应满足位
移边界条件式(2.4-1),在
σS 上各点应满足
应力边界条件式(2.4-3)。
对于混合边界条件,可以分别给在边界
面的不同区域上,也可以给在同一区域的不
同方向上。也即,对于边界上的一个点,在
某一确定方向上,必须且只能给出u S 和σS 中
的一种,既不能同时给定,也不能同时不给 图2.9 受均布载荷悬臂梁 定;而同—点在两个互相垂直方向止,可以是
其中一个为σS ,另一个为u S 。
例2—1 如图2.9所示的一矩形截面悬臂梁,跨度为l ,梁上表面作用均匀载荷q 。试写出该问题的边界条件。并检查材料力学的应力公式是否满足力的边界条件。
解:由材料力学所得的应力分量为 z
x I y qx 23-=σ, 0=y σ, z z xy I qxS -=τ (a) 1) 梁的上表面2
h y =处 0_=X , q Y -=_
而 0),cos(==x N l , 1),cos(-==y N m
代入力的边界条件(2.4-3),则解得
0=yx τ, q y -=σ
由上式可知,因为材料力学作了纵向纤维无挤压的假设,无法算出y σ的分布规律。因此,材料力学的应力计算公式(a)结果并不满足上表面q y -=σ的边界条件。
2) 梁的下表面2
h y -=处 0_=X , 0_=Y
而 1),cos(-==x N l , 0),cos(==y N m
代入式(2.4-3)后解得
0=yx τ, 0=y σ
由上式可见,材料力学的应力计算公式(a)的结果满足该边界的力边界条件,其中0=y σ是由材料力学的假设得出的。
3) 0=x 的自由端处
0_=X , 0_=Y
又 1),cos(-==x N l , 0),cos(==y N m
代入式(2.4-3)后解得
0=xy τ, 0=y σ
因此,在该边材料力学的应力计算公式(a)的结果也满足该边界的力边界条件。 4) l x =的固定端处
因为固定端的外力分布没有具体给定.我们只能求出该端面上的合力和合力矩的大小。且固定端限制了梁的移动和转动,所以该截面的位移边界条件是很重要的。位移边界条件可表示为
0_=u , 0_=v , 0=??x u 或 0=??y
v (在l x =,0=y 处) 有关这方面的内容和处理方法将在后面的章节中详细介绍。
主应力、主切应力和八面体应力
在受力物体内一点任意方向的微小面元上,一般都有正应又和切应力,不同方向的面元上这些应力有不同的数值。当此微小面元转动时,它的法线方向N 随之改变,面元上的正应力σ和切应力τ的方向和它们的值也都要发生变化。在外法线方向不断改变过程中,必然会出现面元上只有正应力,而切应力τ等于零的情况。把这时面元的法线方向N 称为主应力方向(主方向),相应的正应力N σ称为主应力,它所在的面称为主平面。以下将说明,物体中任一点都有3个主应力和相应的3个主方向。
1. 主应力
在图2.7中,如令z y x p p p ,,为ABC 面上单位面积面力的三个分量,则有
2222z
y x p p p p ++= (a)
将面元ABC 上单位面积的三个分量z y x p p p ,,投影到面元的法线方向N ,即得面元ABC 的正应力为
n p m p l p z y x N ++=σ (b) 将(2.3-2)式代入(b)式,并经整理后则得
)(2222nl mn lm n m l zx yz xy z y x N τττσσσσ+++++= (2.5-1) 式(2.5-1)即为任意法线方向N 的斜面上正应力的表达式。该面上的切应力为
222N
N p στ-= (2.5-2) 将式(a)和式(2.5-1)代入上式(2.5-2),可得法线方向为N 的斜面上的切应力。 注意到
1222=++n m l (2.5-3) 因而三个方向余弦并不是独立的。现以l 、m 为独立变量,N σ和n 看成是l 和m 的函数,并求(2.5-1)式的极值。因此,其一阶偏导数应满足
0=??l N σ, 0=??m
N σ 即 ?
??=??+++++=??+++++0)(0)(m n n m l n m l l n n m l n m l z zy zx yz y xy z yz zx zx xy x στττστσττττσ (c) 由式(2.5-3)可求得n 对l 和m 的两个偏导数为 n l l n -=??, n m m n -==?? (d) 将(d)式代入(c)式,并注意到(2.3-2)式,可得 n p m p l p z y x ==
令其比值为N σ,则有
??
???===n p m p l p N z N y N x σσσ (e)
式(e)说明,在正应力取极值的斜平面上,全应力投影与斜平面的方向余弦成正比,比值N σ当然是正应力,正应力投影就是斜平面上全部应力的投影,而切应力不存在,因此主应力(主平面)确实存在。
将 (2.3-2) 式代入(e)式,经整理后得
??
???=-++=+-+=++-0)(0)(0)(n m l n m l n m l N z yz xz yz N y xy xz xy N x σστττσστττσσ (2.5-4)
或用张量符号写为
0)(=-j N ij ij l σδσ (2.5-5) 此处ij δ为δ-ker Ktonec ,定义为
???=0
1ij δ j i j i ≠= 在(2.5-4)式中,共有4个未知数,即l 、m 、n 和N σ,但由(2.5-3)式知,l 、m 、n 这3个方向余弦不可能同时为零,因此,(2.5-4)可看成是关于l 、m 、n 的线性齐次方程组,而且应有非零解存在,由线性齐次方程组有非零解的条件可得到 0=---N
z yz xz
yz N y xy
xz xy N
x σστττσστττσσ 展开上式得 032213=-+-I I I N N N σσσ (2.5-6)
其中 z y x I σσσ++=1
)(2222xz yz xy x z z y y x I τττσσσσσσ++-++= )(22223xy z xz y yz
x xz yz xy z y x z
yz xz yz y xy xz
xy x I τστστστττσσσστττστττσ++-+== 方程式(2.5-6)是一关于N σ的三次方程,它至少有一个实根。令其为z σσ=3,该上0==xz yz ττ。这样式(2.5-6)中剩下的应力分量只有xy y x τσσ,,,可由平面应力状态理论求得其余两主应力1σ、2σ以
及它们作用的方向。这就简单地证明了,在物体内的任意一点,一定存在三个互相垂直的应力主平面,以及对应的三个主应力,它们的方向称为应力主方向。 因为主应力1σ,2σ,3σ是方程(2.5-6)的根,按大小排列为321σσσ>>,它们分别位于三个互相垂直的主平面,且在主平面上切应力为零,所以式(2.5-6)也可改写为
0)()(32113322123213=-+++++-σσσσσσσσσσσσσσσN N N
由代数学可知,为保证此方程和式(2.5-6)的解相同,其系数应相同,出此可得三个系数为
z y x I σσσ++=1=321σσσ++
)(2222xz yz xy x z z y y x I τττσσσσσσ++-++==133221σσσσσσ++
)(22223xy z xz y yz x xz yz xy z y x z
yz xz yz y xy xz
xy x I τστστστττσσσστττστττσ++-+===321σσσ
由于在一定的应力状态下,物体内任一点的主应力不会随坐标系的改变而改变,所以式(2.5-6)所给出的系数1I ,2I ,3I 分别称为第一、第三、第三应力张量不变量,简称应力不变量。
以主应力1σ,2σ,3σ的方向为坐标轴(分别记为1、2、3)的几何空间,称为主向空间。
在主向空间,(2.5-1)和(2.5-2)式则为
232221n m l N σσσσ++= (2.5-7) 2232221223222
221)(n m l n m l N σσσσσστ++-++= (2.5-8) 2. 主切应力
当在主向空间讨论切应力N τ的变化时,(2.5-2)式可写为
22322212232222212)(n m l n m l N σσσσσστ++-++= (2.5-9)
由(2.5-3)可知
2221m l n --=
将2n 用上式代替后,(2.5-9)式可得
[]2
32322312322322223212)()()()(σσσσσσσσσστ+-+--+-+-=m l m l N 为了求出N τ的极值,取2N τ对l 和m 的偏导数,并令它等于零,这时有 ???
????=??????---+-=??????---+-0)(21)()(0)(21)()(3223223131232231σσσσσσσσσσσσm l m m l l (f)
满足上式的解有以下四种情况:
(1)0=l 、0=m ,由(2.5-3)式可得±=n ,由(2.5-7)式得0=N τ,这是一主平面。
(2)0≠l 、0=m ,由式(f)的第一式得
0)21)((231=--l σσ
因0)(31≠-σσ,故 2
1
±=l 由式(2.5-3)可知 21
±=n
该解表示通过2σ,并平分1σ、3σ所夹再的平面,如图2.10a)所示。
a) b) c)
图2.10 主切应力平面
用同样的方法可得
(3)0=l ,2
1
±==n m (4) 0=n ,21
±==m l
解(3)代表通过1σ,并平分2σ、3σ所夹角的平面,见图2.10b);而解(4)代表通过2σ并平
分1σ、3σ所夹角的平面,见图1.10c)。现将所有的解列于表2.2中。
表2.2 切应力有极值的平面方位
将以上所得到的l 、m 、n 值代入式(2.5-9)中,可以得到所求方向的切应力的极值,这时有 ?????????
-±=-±=-±
=22221
121331
3223σστσστσστ (2.5-10) 称23τ、31τ、12τ为主切应力,这些主切应力所在的面如图1.10所示,依据主应力大小的排列次序,则最大切应力23
1max σστ-=。且上式可知,显然23τ、31τ、
12τ满足下式所列条件
23τ+31τ+12τ=0
注意,在主切应力所在平面正应力σ并不为零,它们分别为23
2σσ+,2
31σσ+,22
1σσ+。
3. 八面体应力
当变形物体受载较大时,可能产生塑性变形。在塑性理论中,除要用到最大切应力外,还要用到正八面体的切应力。现在主向空间取一如图2.11a)所示的倾斜面,且该倾斜面的法线N 与三个坐标轴呈等倾斜,即具方尚余弦为
n m l ==
根据(2.5-3)式可知 31===n m l (2.5-11)
a) b)
图2.11 等倾平面与正八面体
将以上方向余弦的值代入式(2.5-7)和(2.5-8),并注意到应力第一不变量1I 则得正八面体的正应力8σ和8τ分别为,
8σ=)(31321σσσ++)(3
1z y x σσσ++= (2.5-12) 由此可见,正八面体上的正应力等于三个正应力之和的三分之一,此值又称为平均正应力,记为m σ。即
m σ=)(31321σσσ++)(3
1z y x σσσ++= (2.5-13) 如将式(2.5-11)代入式(2.5-8)并整理后,则得正八面体上的剪应力8
τ为
8τ=213232221)()()(3
1σσσσσσ-+-+- (2.5-14) 正八面体上的应力可以用应力第一不变量和皮力第二不变量来表示为 ??
???-==2221818623131I I I τσ (2.5-14) 八面体剪应力还可以用主剪应力表示,即 23122321283
2ττττ++= (2.5-15) 由于正八面体上的剪应力和正应力均为不变量,因此通过它们可以方便池表示材料的某些力学行为。
2.6应力球张量与应力偏张量
在外力作用下,物体的变形通常可分为体积改变和形状改变两部分。体积改变是由于各向相等的应力引起的,因而,在一般情况下,某一点处的应力状态可以分解为两部分,一部分是各向相等的压(或拉)应力0σ,另一部分记为ij S ,即
ij ij S +=0σσ (2.6-1)
其中 ??????????=m m m σσσσ0000000 ????
??????---=m z zy zx yz m y yx xz xy m x ij S σστττσστττσσ
在主向空间内,如令任一斜面N 上的应力矢量为P ,则沿坐标轴1、2、3似分量为 ??
???===n p m p l p 332211σσσ (a)
当一点的三个主应力相等时(等拉或等压),则(2.6-1)式中ij S =0,此时应力张量0σ中的元素为m σσσσ===321,将式(a)代入式(2.5-3),得
2232221m
p p p σ=++ 这是一个以m σ为半径,以坐标轴原点为球心的球面方程,如图2.12所示。因此,定义0σ为应力球张量。
对于固体材料,经试验己证明,在各向相等的应力作用下,通常都表现为弹性性质。对于一般应力状态, 则ij S 使物体产生形状变化,称ij S 为应力偏张量。因此,对于材料的非弹性变形,也即塑性变形可以认为主要是物体产生形状变化时产生的。
图2.12 等主应力状态(应力球张量)
以主应力表示的应力偏张量为 ????????????????------=320003200
032213132321σσσσσσσσσij S 对于球张量0σ和应力偏张量ij S ,可以类似于应力张量ij σ那样得到应力偏张量的三个不变量为
01=J (2.6-2a) []
33)()()(612212132322212I I J +=-+-+--=σσσσσσ (2.6-2b) [])2)(2)(2(27
12131323213σσσσσσσσσ------=J =)2792(27
132131I I I I ++ (2.6-2c)
弹塑性力学简答题
弹塑性力学简答题 第一章 应力 1、 什么是偏应力状态?什么是静水压力状态?举例说明? 静水压力状态时指微六面体的每个面只有正应力作用,偏应力状态是从应力状态中扣除静水压力后剩下的部分。 2、应力边界条件所描述的物理本质是什么? 物体边界点的平衡条件。 3、对照应力张量ij δ与偏应力张量ij S ,试问:两者之间的关系?两者主方向之间的关系? 相同。110220330 S S S σσσσσσ=+=+=+。 4、为什么定义物体内部应力状态的时候要采取在一点的领域取极限的方法? 不规则,内部受力不一样。 5、解释应力空间中为什么应力状态不能位于加载面之外? 保证位移单值连续。连续体的形变分量x ε、y ε、xy τ不是互相独立的,而是相关,否则导致位移不单值,不连续。 6、Pie 平面上的点所代表的应力状态有何特点? 该平面上任意一点的所代表值的应力状态1+2+3=0,为偏应力状态,且该平面上任一法线所代表的应力状态其应力解不唯一。 固体力学解答必须满足的三个条件是什么?可否忽略其中一个? 第二章 应变 1、从数学和物理的不同角度,阐述相容方程的意义。 从数学角度看,由于几何方程是6个,而待求的位移分量是3个,方程数目多于未知函数的数目,求解出的位移不单值。从物理角度看,物体各点可以想象成微小六面体,微单元体之间就会出现“裂缝”或者相互“嵌入”,即产生不连续。 2、两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完全相同的线弹性平面问题,它们的应力分布是否相同?为什么? 相同。应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程,与材料性质无关。 3、应力状态是否可以位于加载面外?为什么? 不可以。保证位移单值连续。连续体的形变分量x ε、y ε、xy τ不是互相独立的,而是相关,否则导致位移不单值,不连续。 4、给定单值连续的位移函数,通过几何方程可求出应变分量,问这些应变分量是否满足变形协调方程?为什么? 满足。根据几何方程求出各应变分量,则变形协调方程自然满足,因为变形协调方程本身是从几何方程中推导出来的。 5、应变协调方程的物理意义是什么? 对于单连通体,协调方程是保证由几何方程积分出单值连续的充分条件。多于多连通体,除满足协调方程方程外,还应补充保证切口处位移单值连续的附加条件。 6、已知物体内一组单值连续的位移,试问通过几何方程给出的应变一定满足变形协调方程吗?为什么?
清华大学研究生弹塑性力学讲义 8弹塑性_塑性力学基本方程和解法
弹塑性力学 第七章塑性力学的基本方程与解法 一、非弹性本构关系的实验基础 拿一根工程上最常用的低碳钢的试件,在拉伸试验机上就可得到如图7.1所示的应力应变曲线。图中A为比例极限,当变形状态未超过A点时材料处于线弹性状态;B为弹性极限,AB段的变形虽然还是弹性的,即卸载时能按原来的加载曲线返回,但应力应变之间不再是线性关系。C,D分别为上、下屈服极限,超过C点后材料进入塑性变形状态,卸载时不再按原来的加载曲线返回,而且当载荷完全卸除后还有残余变形。由C到D是突然发生的,由于材料屈服引起应力突然下降,而应变继续增加。由D到H是一接近水平的线段,称为塑性流动段。对同一种材料D点的测量值比较稳定,而C点受试件截面尺寸、加载速率等影响较大。如果载荷在使材料屈服之后还继续增加,则进入图中曲线右部的强化段。即虽然材料已经屈服,但只有当应力继续增加时,应变才能继续增大。在图中b点之后,试件产生颈缩现象,最后试件被拉断。如果在塑性流动段的D′点,或强化段的H′点卸载,将能观测到沿着与OA平行的直线返回,当载荷为零是到达O′点或O′′点,即产生残余变形。 图7.1 低碳钢单向拉伸应力应变曲线 有些高强度的合金钢并没有象低碳钢那样的屈服段,其单向拉伸的应力应变曲线如图7.2所示。这种情况下屈服极限规定用产生0.2%塑性应变所对应的应力来表示,σ。 记为 0.2 图7.2 高强度合金钢单向拉伸应力应变曲线
第七章 塑性力学的基本方程与解法 如果以超过屈服极限的载荷循环加载,所得试验结果则象图7.3所示。在实验中还发现,对于某些材料(图7.4),如果在加载(拉伸)屈服后完全卸载到O ′′点,然后接着反向加载(压缩),则其反向屈服点对应的应力绝对值s σ′′不仅小于s σ′,而且小于初始屈服应力的绝对值σ′。这是德国的包辛格(Bauschinger, J.)最早发现的,称为包辛格效应。 图7.3 循环加载曲线示意图 图7.4 包辛格效应 当材料进入塑性状态后,如果不是单调加载,则应力和应变之间不仅不是单值函数的关系,而且当时的应变不仅和当时的应力有关,还和整个加载的历史有关。同样,当时的应力不仅和当时的应变有关,而且也和整个变形的历史有关。这就增加了问题的复杂性。材料的特性不能简单的用应力应变关系来描述,而要用比较复杂的本构关系,即应力和整个变形历史的关系来描述。 此外,在实际工程问题中经常遇到的材料非线性问题往往不是单向应力状态,即不是一维问题。要对三维问题单靠实验来确定应力张量和应变张量之间的关系几乎是不可能的。因此,在建立非线性本构关系时,除去不能脱离实验基础之外,还必须有基本理论的指导。 二、刚塑性与弹塑性本构模型 z 简化模型 对于低碳钢一类材料,如果承载后产生的变形状态一直达到塑性流动段,为了简化起见,略去应力应变曲线中的上、下屈服极限等细节,可得到由线弹性段和塑性流动水平线段组成的简化模型,称为理想弹塑性模型(图7.5a ): s s s s E E σεεεσεσεε=≤??==>?当当 (1) 在金属成型等问题中,由于塑性流动引起的塑性应变较大,而弹性应变因相比较小而将其忽略,则又可进一步简化为只有水平线段的刚塑性模型(图7.5b ):
武汉大学弹塑性力学简答题以及答案
弹塑性力学简答题 2002年 1什么是偏应力状态?什么是静水压力状态?举例说明? 静水压力状态时指微六面体的每个面只有正应力作用,偏应力状态是从应力状态中扣除静水压力后剩下的部分。 2从数学和物理的不同角度,阐述相容方程的意义。 从数学角度看,由于几何方程是6个,而待求的位移分量是3个,方程数目多于未知函数的数目,求解出的位移不单值。从物理角度看,物体各点可以想象成微小六面体,微单元体之间就会出现“裂缝”或者相互“嵌入”,即产生不连续。 3两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完全相同的线弹性平面问题,它们的应力分布是否相同?为什么? 相同。应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程,与材料性质无关。 4虚位移原理等价于哪两组方程?推导原理时是否涉及到物理方程?该原理是否适用于塑性力学问题? 平衡微分方程和静力边界条件。不涉及物理方程。适用于塑性力学问题。 5应力状态是否可以位于加载面外?为什么? 不可以。保证位移单值连续。连续体的形变分量、、不是互相独立的,而是相关,否则导致位移不单值,不连续。 6什么是加载?什么是卸载?什么是中性变载?中性变载是否会产生塑性变形?加载:随着应力的增加,应变不断增加,材料在产生弹性变形的同时,还会产生新的塑性变形,这个过程称之为加载。
卸载:当减少应力时,应力与应变将不会沿着原来的路径返回,而是沿接近于直线的路径回到零应力,弹性变形被恢复,塑性变形保留,这个过程称之为卸载。 中性变载:应力增量沿着加载面,即与加载面相切。应力在同一个加载面上变化,内变量将保持不变,不会产生新的塑性变形,但因为应力改变,会产生弹性应变。 7用应力作为未知数求解弹性力学问题时,应力除应满足平衡方程外还需要满足哪些方程?协调方程和边界条件。 8薄板弯曲中,哪些应力和应变分量较大?哪些应力和应变分量较小? 平面内应力分量最大,最主要的是应力,横向剪应力较小,是次要的应力;z方向的挤压应力最小,是更次要的应力。 9什么是滑移线?物体内任意一点沿滑移线的方向的剪切应力是多少? 在塑性区内,将各点最大剪应力方向作为切线而连接起来的线,称之为滑移线。 剪切应力是最大剪应力。 10什么是随动强化?试用单轴加载的情况加以解释? 2004 1对于各项同性线弹性材料,应用广义胡克定律说明应力与应变主轴重合? ,当某个面上的剪切应力为零时,剪应变也为零,这说明应力的主方向与应变的主方向重合。 2应力边界条件所描述的物理本质是什么? 物体边界点的平衡条件。 3虚位移原理等价于哪两组方程?这说明了什么?
弹塑性力学基本理论及应用 刘土光 华中科技大学研究生院教材基金资助 第二章应力状态
第二章 应力状态理论 2.1 应力和应力张量 在外力作用下,物体将产生应力和变形,即物体中诸元素之间的相对位置发生变化,由于这种变化,便产生了企图恢复其初始状态的附加相互作用力。用以描述物体在受力后任何部位的内力和变形的力学量是应力和应变。本章将讨论应力矢量和某一点处的应力状态。 为了说明应力的概念,假想把受—组平衡力系作用的物体用一平面A 分成A 和B 两部分(图2.1)。如将B 部分移去,则B 对A 的作用应代之以B 部分对A 部分的作用力。这种力在B 移去以前是物体内A 与B 之间在截面C 的内力,且为分布力。如从C 面上点P 处取出一包括P 点在内的微小面积元素S ?,而S ?上的内力矢量为F ?,则内力的平均集度为F ?/S ?,如令S ?无限缩小而趋于点P ,则在内力连续分布的条件下F ?/S ?趋于一定的极限σo ,即 σ=??→?S F S 0lim 这个极限矢量σ就是物体在过c 面上点P 处 的应力。由于S ?为标量,故,σ的方向与F ?的 极限方向一致。内力矢量F ?可分解为所在平面 的外法线方向和切线方向两个分量n F ?和s F ?。 同样,应力σ可分解为所在平面的外法线方向 和切线方向两个分量。沿应力所在平面 的外法线方向n 的应力分量称为正应力,记为n σ,沿切线方向的应力分量称为切应力,记为 n τ。此处脚注n 标明其所在面的外法线方向,由此, S ?面上的正应力和切应力分别为 在上面的讨论中,过点P 的平面C 是任选的。显然,过点P 可以做无穷多个这样的平面C ,也就是说,过点P 有无穷多个连续变化的n 方向。不同面上的应力是不同的。这样,就产生了如何描绘一点处的应力状态的问题。为了研究点P 处的应力状态,在点P 处沿坐标轴x ,y ,z 方向取一个微小的平行六面体(图2.2),其六个面的外法线方向分别与三个坐标轴的正负方向重合,其边长分别为x ?,Δy ,Δz 。假定应力在各面上均匀分布,于是各面上的应力便可用作用在各面中心点的一个应力矢量来表示,每个面上的应力矢量又可分解关一个正应力和两个切应力分量,如图2.2所示。以后,对正应力只用一个字母的下标标记,对切应力则用两个字母标记*其中第一个字母表示应力所在面的外法线方向;第二个字母表示应力分量的指向。正应力的正负号规定为:拉应力为正,压应力为负。切应力的正负早规定分为两种情况:当其所在面的外法线与坐标轴的正方向一致时,则以沿坐标轴正方向的切应力为正.反之为负;当所在面的外法线与坐标袖的负方向一致时,则以沿坐标轴负方向的切应力为正,反之为负。图2.2中的各应力分量均为正。应力及其分量的单位为Pa 。 图2.1 应力矢量
应用弹塑性力学李同林第四章
应用弹塑性力学李同林第四章 这是变形理论。这个理论首先由亨斯基提出,然后由前苏联的伊留申进一步完善。问题提出得更清楚了,并且给出了使用条件。因此,这个理论也被称为亨奇-伊柳辛理论。伊柳欣的变形理论应该满足几个条件: (1)外载荷(包括体力)成比例增加,变形体处于主动变形过程中(即应力强度无中间卸载); (2)材料所用体积不可压缩,采用泊松比μ = 1/2进行计算;(3)材料的应力-应变曲线具有幂强化形式,即 或者 ; 在变形过程中 (4)满足小弹塑性变形的各种条件,塑性变形和弹性变形大小相同。满足上述条件后,变形理论将给出正确的结果。如果负载没有成比例地增加,则外部负载成比例地增加是简单负载的必要条件。这样不仅不能保证物体内部的简单加载状态,而且物体表面也不能满足简单加载条件。体积不可压缩性和泊松比μ=1/2的假设不仅简化了具体计算,而且与实验结果基本一致,因此变形理论的物理关系主要表现为应力挠度和应变挠度之间的关系,这是令人满意的。 法律。 使用幂强化模型可以避免区分弹性区和塑性区,但实际上该模型对不同材料的限制很小,因为各种材料都可以通过选择公式中常数a的指
数m来拟合拉伸曲线。采用小变形条件是因为平衡方程和几何方程是在小变形条件下推导出来的,物理关系也是小变形条件下的关系。伊柳辛不仅明确规定了亨奇变形理论的适用条件,而且证明了简单加载定理。他提出,在小的弹塑性变形条件下,总应变与应力挠度成正比,即: 如果使用主应力,有 等效应变的表达式为: 从这里 因此,Hench-Ilyushin理论的应力-应变关系可以写成如下: 展开等式(4-84): 根据胡克定律(4-33),弹性应变为: 因为塑性应变是总应变和弹性应变之间的差,所以它由方程(4-85)和(1)获得: 公式(4-86)可以缩写为: 实施例4-3众所周知,具有封闭端的薄壁圆筒的平均半径为R,平均直径为D,壁厚为T,圆筒长度为L,并且承受内压P以产生塑性变形。材料是各向同性的。尝试找到: (1)如果忽略弹性应变,周向、轴向和径向应变之比在圆筒壁上的一点处增加; (2)如果材料是不可压缩的,即μ=1/2,圆柱壁上一点的周向、轴向和径向应变总量之比。 因为t/r1是解,所以可以近似地考虑圆柱壁中每个点的径向应力ζr=0。
应用弹塑性力学习题解答
应用弹塑性力学习题解答 目录 第二章习题答案 设某点应力张量的分量值已知,求作用在过此点平面上的应力矢量,并求该应力矢量的法向分量。 解该平面的法线方向的方向余弦为 而应力矢量的三个分量满足关系 而法向分量满足关系最后结果为 利用上题结果求应力分量为时,过平面处的应力矢量,及该矢量的法向分量及切向分量。 解求出后,可求出及,再利用关系
可求得。 最终的结果为 已知应力分量为,其特征方程为三次多项式,求。如设法作变换,把该方程变为形式,求以及与的关系。 解求主方向的应力特征方程为 式中:是三个应力不变量,并有公式 代入已知量得 为了使方程变为形式,可令代入,正好项被抵消,并可得关系 代入数据得,, 已知应力分量中,求三个主应力。 解在时容易求得三个应力不变量为, ,特征方程变为 求出三个根,如记,则三个主应力为 记 已知应力分量 ,是材料的屈服极限,求及主应力。 解先求平均应力,再求应力偏张量,, ,,,。由此求得 然后求得,,解出 然后按大小次序排列得到 ,,
已知应力分量中,求三个主应力,以及每个主应力所对应的方向余弦。 解特征方程为记,则其解为,,。对应于的方向余弦,,应满足下列关系 (a) (b) (c) 由(a),(b)式,得,,代入(c)式,得 ,由此求得 对,,代入得 对,,代入得 对,,代入得 当时,证明成立。 解 由,移项之得 证得 第三章习题答案 取为弹性常数,,是用应变不变量表示应力不变量。
解:由,可得, 由,得 物体内部的位移场由坐标的函数给出,为, ,,求点处微单元的应变张量、转动张量和转动矢量。 解:首先求出点的位移梯度张量 将它分解成对称张量和反对称张量之和 转动矢量的分量为 ,, 该点处微单元体的转动角度为 电阻应变计是一种量测物体表面一点沿一定方向相对伸长的装置,同常利用它可以量测得到一点的平面应变状态。如图所示,在一点的3个方向分别粘贴应变片,若测得这3个应变片的相对伸长为,,,,求该点的主应变和主方向。 解:根据式先求出剪应变。考察方向线元的线应变,将,,,,,代入其 中,可得 则主应变有 解得主应变,,。由最大主应变可得上式只有1个方程式独立的,可解得与轴的夹角为 于是有,同理,可解得与轴的夹角为。 物体内部一点的应变张量为 试求:在方向上的正应变。
《材料力学》第章%B应力状态和强度理论%B习
第七章 应力状态和强度理论 习题解 [习题7-1] 试从图示各构件中A 点和B 点处取出单元体,并表明单元体各面上的应力。 [习题7-1(a )] 解:A 点处于单向压应力状态。 2244 12d F d F F A N A ππσ-=-== [习题7-1(b )] 解:A 点处于纯剪切应力状态。 331616 1d T d T W T P A ππτ-=== MPa mm mm N 618.798014.3108163 36=????= [习题7-1(b )] 解:A 点处于纯剪切应力状态。 0=∑A M 04.028.02.1=?--?B R )(333.1kN R B = A σ A τ
)(333.1kN R Q B A -=-= MPa mm N A Q A 417.01204013335.15.12-=??-=? =τ B 点处于平面应力状态 MPa m m m m m m N I y M z B B 083.21204012 130103.0333.1436=??????==σMPa m m m m m m N b I QS z z B 312.0401204012 145)3040(13334 33 *-=??????-== τ [习题7-1(d )] 解:A 点处于平面应力状态 MPa m m m m N W M z A A 064.502014.332 1103.39333=????==σ MPa m m m m N W T P A 064.502014.316 1106.78333 =????== τ [习题7-2] 有一拉伸试样,横截面为mm mm 540?的矩形。在与轴线成0 45=α角的面上切应力MPa 150=τ时,试样上将出现滑移线。试求试样所受的轴向拉力F 。 解:A F x = σ;0=y σ;0=x τ 004590cos 90sin 2 x y x τσστ+-= A F 20 45= τ 出现滑移线,即进入屈服阶段,此时, 15020 45≤= A F τ kN N mm mm N A F 6060000540/30030022==??== [习题7-3] 一拉杆由两段沿n m -面胶合而成。由于实用的原因,图中的α角限于0 60 ~0范围内。作为“假定计算”,对胶合缝作强度计算时,可以把其上的正应力和切应力分别与相应的许用应力比较。现设胶合缝的许用切应力][τ为许用拉应力][σ的4/3 ,且这一拉杆 A τ B τ B σA τA σ
弹塑性力学讲义应力
第1章 应 力 1. 1 应力矢量 物体受外力作用后,其内部将产生内力,即物体本身不同部分之间相互作用的力。为了描述内力场,Chauchy 引进了应力的重要概念。对于处于平衡状态的物体,假想使用一个过P 点的平面C 将其截开成A 和B 两部分。如将B 部分移去,则B 对A 的作用应以分布的内力代替。考察平面C 上包括P 点在内的微小面积,如图1.1所示。设微面外法线(平面C 的外法线)为n ,微面面积为?S ,作用在微面上的内力合力为?F ,则该微面上的平均内力集度为?F /?S ,于是,P 点的内力集度可使用应力矢量T (n ),定义为 T (n ) =S F s ???0 lim → B ?S A C P n ?F x y z 图1.1 应力矢量定义 在笛卡儿坐标系下,使用e x ,e y 和e z 表示坐标轴的单位基矢量,应力矢量可以表示为 T (n ) = T x e x +T y e y +T z e z (1.1) 式中T x 、T y 和T z 是应力矢量沿坐标轴的分量。
上篇弹性力学第1章应力 8 除进行公式推导外,通常很少使用应力矢量的坐标分量T x、T y 和T z。实际应用 中,往往需要知道应力矢量沿微面法线方向和切线方向的分量,沿法线方向的应力分量称为正应力,沿切线方向的应力分量称为剪应力。 显而易见,应力矢量的大小和方向不仅取决于P点的空间位置,而且还与所取截面的法线方向n有关,即作用在同一点不同法线方向微面上的应力矢量不同。所有这些应力矢量构成该点的应力状态。 由应力矢量的定义并结合作用力与反作用力定律,在同一点,外法线为-n微面上的应力矢量为: T(-n)= -T(n) (1.2) 1.2 应力张量 人们讨论问题常常是在笛卡儿坐标中进行,因此,我们使用六个与坐标面平行的平面从图1.1中P点的邻域截取一个微六面体,如图1.2所示。在这个微六面体中,若微面的外法线方向与坐标正方向一致,则称为正面;若与坐标正方向相反,则称为负面。因此有三个正面和三个负面。 图1.2 一点的应力状态
弹塑性力学简答题
弹塑性力学简答题
弹塑性力学简答题 第一章 应力 1、 什么是偏应力状态?什么是静水压力状态?举例说明? 静水压力状态时指微六面体的每个面只有正应力作用,偏应力状态是从应力状态中扣除静水压力后剩下的部分。 2、应力边界条件所描述的物理本质是什么? 物体边界点的平衡条件。 3、对照应力张量ij δ与偏应力张量ij S ,试问:两者之间的关系?两者主方向之间的关系? 相同。110220330 S S S σσσσσσ=+=+=+。 4、为什么定义物体内部应力状态的时候要采取在一点的领域取极限的方法? 不规则,内部受力不一样。 5、解释应力空间中为什么应力状态不能位于加载面之外? 保证位移单值连续。连续体的形变分量x ε、y ε、xy τ不是互相独立的,而是相关,否则导致位移不单值,不连续。 6、Pie 平面上的点所代表的应力状态有何特点? 该平面上任意一点的所代表值的应力状态1+2+3=0,为偏应力状态,且该平面上任一法线所代表的应力状态其应力解不唯一。 固体力学解答必须满足的三个条件是什么?可否忽略其中一个? 第二章 应变 1、从数学和物理的不同角度,阐述相容方程的意义。 从数学角度看,由于几何方程是6个,而待求的位移分量是3个,方程数目多于未知函数的数目,求解出的位移不单值。从物理角度看,物体各点可以想象成微小六面体,微单元体之间就会出现“裂缝”或者相互“嵌入”,即产生不连续。 2、两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完全相同的线弹性平面问题,它们的应力分布是否相同?为什么? 相同。应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程,与材料性质无关。 3、应力状态是否可以位于加载面外?为什么? 不可以。保证位移单值连续。连续体的形变分量x ε、y ε、xy τ不是互相独立的,而是相关,否则导致位移不单值,不连续。 4、给定单值连续的位移函数,通过几何方程可求出应变分量,问这些应变分量是否满足变形协调方程?为什么? 满足。根据几何方程求出各应变分量,则变形协调方程自然满足,因为变形协调方程本身是从几何方程中推导出来的。 5、应变协调方程的物理意义是什么? 对于单连通体,协调方程是保证由几何方程积分出单值连续的充分条件。多于多连通体,除满足协调方程方程外,还应补充保证切口处位移单值连续的附加条件。 6、已知物体内一组单值连续的位移,试问通过几何方程给出的应变一定满足变形协调方程吗?为什么?
弹塑性力学讲义全套
弹塑性力学 弹塑性力学 绪论:弹性力学也称弹性理论,主要研究弹性体在外力作用或温度变化等外界因素下所产生的应力、应变和位移,从而解决结构或机械设计中所提出的强度和刚度问题。在研究对象上,弹性力学同材料力学和结构力学之间有一定的分工。材料力学基本上只研究杆状构件;结构力学主要是在材料力学的基础上研究杆状构件所组成的结构,即所谓杆件系统;而弹性力学研究包括杆状构件在内的各种形状的弹性体。 弹塑性力学是固体力学的一个重要分支,是研究弹性和塑形物体变形规律的一门学科。它推理严谨,计算结果准确,是分析和解决许多工程技术问题的基础和依据。在弹塑性力学中,我们可以看到很多学习材料力学、结构力学等学科所熟知的参数和变量,一些解题的思路也很类似,但是我们不能等同的将弹塑性力学看成材料力学或者是结构力学来学习。材料力学和结构力学的研究对象及问题,往往也是弹塑性力学所研究的对象及问题。但是,在材料力学和结构力学中主要采用简化的初等理论可以描述的数学模型;在弹塑性力学中,则将采用较精确的数学模型。有些工程问题(例如非圆形断面柱体的扭转、孔边应力集中、深梁应力分析等问题)用材料力学和结构力学的方法求解,而在弹塑性力学中是可以解决的;有些问题虽然用材料力学和结构力学的方法可以求解,但无法给出精确可靠的理论,而弹塑性力学则可以给出用初等理论所得结果可靠性与精确度的评价。在弹塑性力学分析中,常采用如下简化假设:连续性假设、均匀各向同性、小变形假设、无初应力假设等假设。 弹塑性力学基本方程的建立需要从几何学、运动学和物理学三方面来研究。在运动学方面,主要是建立物体的平衡条件,不仅物体整体要保持平衡,而且物体内的任何局部都要处于平衡状态。反映这一规律的数学方程有两类,即运动微分方程和载荷的边界条件。以上两类方程都与材料的力学性质无关,属于普适方
弹塑性力学复习提纲和考试习题
《弹塑性力学》复习提纲 1. 弹性力学和材料力学在求解的问题以及求解方法方面的主要区别是什么? 研究对象的不同:材料力学,基本上只研究杆状构件,也就是长度远远大于高度和宽度的构件。非杆状结构则在弹性力学里研究 研究方法的不同:材料力学大都引用一些关于构件的形变状态或应力分布的假定,得到的解答往往是近似的,弹性力学研究杆状结构一般不必引用那些假定,得到的结果比较精确。并可用来校核材料力学得出的近似解。 2. 弹性力学有哪些基本假设? (1)连续性,(2)完全弹性,(3)均匀性,(4)各向同性,(5)假定位移和形变是微小的 3. 弹性力学有哪几组基本方程?试写出这些方程。 (1)平面问题的平衡微分方程: 平面问题的几何方程: 平面应力问题的物理方程: (在平面应力问题中的物理方程中将E换为,换为就得到平面应变问题的物理方程) (2)空间问题的平衡微分方程;
空间问题的几何方程; 空间问题的物理方程: 4. 按照应力求解和按照位移求解,其求解过程有哪些差别? (1)位移法是以位移分量为基本未知函数,从方程和边界条件中消去应力 分量和形变分量,导出只含位移分量的方程和相应的边界条件,解出位移分量,然后再求形变分量和应力分量。要使得位移分量在区域里满足微分方程,并在边界上满足位移边界条件或应力边界条件。 (2)应力法是以应力分量为基本未知函数,从方程和边界条件中消去位移 分量和形变分量,导出只含应力分量的方程和边界条件,解出应力分量,然后再求出形变分量和位移分量。满足区域里的平衡微分方程,区域里的相容方程,在边界上的应力边界条件,其中假设只求解全部为应力边界条件的问题。 5. 掌握以下概念:应力边界条件和位移边界条件;圣文南原理;平面应力与平 面应变;逆解法与半逆解法。 位移边界条件:若在部分边界上给定了约束位移分量和,则对于此边界上的每一点,位移函数u和v和应满足条件=,=(在 上) 应力边界条件:若在部分边界上给定了面力分量(s)和(s),则可以由边界 上任一点微分体的平衡条件,导出应力与面力之间的关系式。 圣维南原理:如果把物体的一小部分边界上的面力,变换为分布不同但静力等效的面力(主矢量相同,对于同一点的主矩也相同),那么近处的应力分布将有显著的改变,但是远处所受的影响可以不计。 平面应力问题:设所研究的物体为等厚度的薄板,在z方向不受力,外力沿z
应用弹塑性力学习题解答
应用弹塑性力学习题 解答 Revised on November 25, 2020
应用弹塑性力学习题解答 目录 第二章习题答案 设某点应力张量的分量值已知,求作用在过此点平面上的应力矢量,并求该应力矢量的法向分量。 解该平面的法线方向的方向余弦为 而应力矢量的三个分量满足关系 而法向分量满足关系最后结果为 利用上题结果求应力分量为时,过平面处的应力矢量,及该矢量的法向分量及切向分量。
解求出后,可求出及,再利用关系 可求得。 最终的结果为 已知应力分量为,其特征方程为三次多项式,求。如设法作变换,把该方程变为形式,求以及与的关系。 解求主方向的应力特征方程为 式中:是三个应力不变量,并有公式 代入已知量得 为了使方程变为形式,可令代入,正好项被抵消,并可得关系 代入数据得,, 已知应力分量中,求三个主应力。 解在时容易求得三个应力不变量为, ,特征方程变为 求出三个根,如记,则三个主应力为 记 已知应力分量 ,是材料的屈服极限,求及主应力。 解先求平均应力,再求应力偏张量,,
,,,。由此求得 然后求得,,解出 然后按大小次序排列得到 ,, 已知应力分量中,求三个主应力,以及每个主应力所对应的方向余弦。 解特征方程为记,则其解为,,。对应于的方向余弦,,应满足下列关系 (a) (b) (c) 由(a),(b)式,得,,代入(c)式,得 ,由此求得 对,,代入得 对,,代入得 对,,代入得 当时,证明成立。 解 由,移项之得 证得
第三章习题答案 取为弹性常数,,是用应变不变量表示应力不变量。 解:由,可得, 由,得 物体内部的位移场由坐标的函数给出,为, ,,求点处微单元的应变张量、转动张量和转动矢量。 解:首先求出点的位移梯度张量 将它分解成对称张量和反对称张量之和 转动矢量的分量为 ,, 该点处微单元体的转动角度为 电阻应变计是一种量测物体表面一点沿一定方向相对伸长的装置,同常利用它可以量测得到一点的平面应变状态。如图所示,在一点的3个方向分别粘贴应变片,若测得这3个应变片的相对伸长为,, ,,求该点的主应变和主方向。 解:根据式先求出剪应变。考察方向线元的线应变,将,,,,,代入其中,可得 则主应变有
材料力学习题册答案-第7章应力状态
第 七 章 应力状态 强度理论 一、 判断题 1、平面应力状态即二向应力状态,空间应力状态即三向应力状态。 (√) 2、单元体中正应力为最大值的截面上,剪应力必定为零。 (√) 3、单元体中剪应力为最大值的截面上,正应力必定为零。 (×) 原因:正应力一般不为零。 4、单向应力状态的应力圆和三向均匀拉伸或压缩应力状态的应力圆相同,且均为应力轴 上的一个点。 (×) 原因:单向应力状态的应力圆不为一个点,而是一个圆。三向等拉或等压倒是为一个点。 5、纯剪应力状态的单元体,最大正应力和最大剪应力值相等,且作用在同一平面上。(×) 原因:最大正应力和最大剪应力值相等,但不在同一平面上 6、材料在静载作用下的失效形式主要有断裂和屈服两种。 (√) 7、砖,石等脆性材料式样压缩时沿横截面断裂。 (×) 8、塑性材料制成的杆件,其危险点必须用第三或第四强度理论所建立的强度条件来校核强度。 (×) 原因:塑性材料也会表现出脆性,比如三向受拉时,此时,就应用第一强度理论 9、纯剪应力状态的单元体既在体积改变,又有形状改变。(×) 原因:只形状改变,体积不变 10、铸铁水管冬天结冰时会因冰膨胀被胀裂,而管内的冰不会被破坏,只是因为冰的强度比铸铁的强度高。(×) 原因:铸铁的强度显然高于冰,其破坏原因是受到复杂应力状态 二、 选择题 1、危险截面是( C )所在的截面。 A 最大面积 B 最小面积 C 最大应力 D 最大内力 2、关于用单元体表示一点处的应力状态,如下论述中正确的一种是( D )。 A 单元体的形状可以是任意的 B 单元体的形状不是任意的,只能是六面体微元 C 不一定是六面体,五面体也可以,其他形状则不行 D 单元体的形状可以是任意的,但其上已知的应力分量足以确定任意方向面上的硬力 3、受力构件内任意一点,随着所截取截面方位不同,一般来说( D ) A 正应力相同,剪应力不同 B 正应力不同,剪应力相同 C 正应力和剪应力均相同 D 正应力和剪应力均不同 4、圆轴受扭时,轴表面各点处于( B ) A 单向应力状态 B 二向应力状态 C 三向应力状态 D 各向等应力状态 5、分析处于平面应力状态的一点,说法正确的是( B )。 A a σ=0时,必有a τ=max τ或a τ=min τ B a τ=0时,必有a σ=max σ或a σ=min σ C a σ+90a σ+及|a τ|+|90a τ+|为常量 D 1230σσσ≥≥≥
应用弹塑性力学1
弹塑性力学课程总结 主要内容: 1.应力分析 2.应变分析 3.弹性与塑型应力与应变的关系 4.弹性与塑性力学的解题方法 5.旋转圆盘的分析 第一章 应力分析 1.点的应力状态:①定义——合力dP 与面积微元dS 的比值 ②描述方法(3个正应力分量与3个剪应力分量可以描述点 的应力状态); ③分解:意义、方法(m ij ij ij σδσσ+=' )、图示 2.特殊应力: ①主应力(相互正交),含义/求解? '3 '2'1'3 21321,,,,,,I I I I I I ij ij →→→σσσσσ ②最大剪应力 (主应力平面上的剪应力为零;最大剪应力位于坐标 轴分角面上,而三个最大剪应力分别等于三个主应力两两之差的一 半)且最大剪应力为: 23 1max σστ-= ③等倾面上的正应力和剪应力 等倾面即和三个主应力轴成相同角 度的面满足 12 22=++n m l ④ 平均应力(静水压力) 只产生体积缩胀,不产生形变;抑制裂 纹扩展。满足: () 321031 σσσσ++= ⑤应力偏量 ?? ?≠==j i j i ij 当当01δ 从而有 ij ij ij s +=0σδσ 3平衡微分方程:
熟悉35页公式1-39与37页1-40 第二章 应变分析 1.点的应变状态:定义、描述、分解 a 正应变(变形分布均匀) l l l x -= ε b 用位移表示应变的几何关系47页式 (2-8) 柱坐标应变的几何方程48页式 (2-9) 球坐标应变的几何方程50页式 (2-12) 2.应力、应变分析的相似性与差异性(概念、分解、表示、相容性等) 一点的应变状态可以用50页式 (2-13) 3. 应变张量和应变偏量(注意:主应变、主剪应变形式差别) 31max εεγ-= 4. 应变协调方程 见67页式 (2-40) 柱坐标的变形协调方程见68页式 (2-41) 第三章 弹性与塑性应力应变关系 应力与应变的关系是相辅相成的,有应力就会有应变,而有应变就会有应力。 注意复习与掌握5组基本方程: 1. 应力平衡微分方程:含义:表征点的应力之间的关系(基体假设的应用,平面问题的具体形式) 2.几何方程:含义:位移-应变的关系 3.物理方程:广义虎克定律 含义:σ—ε关系 ①公式;②参数含义、关系 ()μ+= 12E G a 胡克定律用应力表示应变见85页式 (3-15) b 胡克定律用应变来表示应力见87页式 (3-18) 4.应变协调方程(相容方程,连续方程):含义,平面问题的相容方程(塑性变形连续方程:) 0321=++p p p εεε a 特雷斯卡屈服条件见90页式 (3-21) b 米泽斯屈服条件见式 (3-23) c 熟悉特雷斯卡条件(1、2、3)与米泽斯条件(1、2、3)的不同处与相同处(1、2) d 塑性应力应变关系(增量理论):莱维-米泽斯本构方程(100)(3-31) 普朗特-罗伊斯本构方程(102)(3-39) (全量理论):亨奇-伊柳辛变形理论 (111)(3-49)
应用弹塑性力学
《应用弹塑性力学》考试试卷 班级_____________ 姓名_____________ 学号______________ 一、简答题(每题5分,共20分) 1试述弹塑性力学中四种常用的简化力学模型及其特点。 2分析特雷斯卡(Tresca )和米泽斯(Mises )屈服条件的异同点。 3 简单论述一下屈服曲面为什么一定是外凸的。 4试述逆解法和半逆解法的主要思想。 二、计算题(1~5题每题10分, 6~7题每题15分,共80分) 1 如图1所示的等截面直杆,截面积为0A ,且b a >,在x a =处作用一个逐渐增加的力P 。该杆材料为理想弹塑性,拉伸和压缩时性能相同,求左端反力N F 和力P 的关系。 F N 图1 2 已知下列应力状态:5383038311ij MPa σ????=?????? ,试求八面体单元的正应力0σ与剪应力0τ。 3 已知物体某点的应力分量,试求主应力及最大剪应力的值。(单位MPa ) (1)x =10σ,y =10σ-,z =10σ,=0xy τ,=0yz τ,=10zx τ-; (2)x =10σ,y =20σ,z =30σ,=5xy τ-,=0yz τ,=0zx τ。 4 当123σσσ>>时,如令21313 2σσσσμσσ--=-,试证明 0max ττ=且该值在0.816~0.943之间。
5已知平面应变状态 1231231230 x y xy z xz yz A A x A y B B x B y C C x C y εεγεγγ=++=++=++=== (1)校核上述应变状态是否满足应变协调方程; (2)若满足应变协调方程,试求位移u 和v 的表达式; (3)已知边界条件 0x y ==,0u =,0v =; x l =,0y =,0v = 确定上述位移表达式中的待定常数。 6 物体中某点的应力状态为100000200000300-????-????-?? MPa ,该物体在单向拉伸时屈服极限为190MPa s σ=,试分别用特雷斯卡(Tresca )和米泽斯(Mises )屈服条件来判断该点是处于弹性状态还是塑性状态。 7已知函数axy ?=,试求:(1)?是否可以作为应力函数;(2)若以?作为应力函数,求出应力分量的表达式;(3)指出在图2所示的矩形板边界上的面力。 图2
新版弹塑性力学简答题-新版.pdf
弹塑性力学简答题 第一章应力 1、什么是偏应力状态?什么是静水压力状态?举例说明? 静水压力状态时指微六面体的每个面只有正应力作用,偏应力状态是从应力状态中扣除静水压力后剩下的部分。 2、应力边界条件所描述的物理本质是什么? 物体边界点的平衡条件。 3、对照应力张量 ij 与偏应力张量ij S,试问:两者之间的关系?两者主方向之间的关系? 相同。110 220 330 S S S 。 4、为什么定义物体内部应力状态的时候要采取在一点的领域取极限的方法? 不规则,内部受力不一样。 5、解释应力空间中为什么应力状态不能位于加载面之外? 保证位移单值连续。连续体的形变分量 x 、y、xy不是互相独立的,而是相关,否则导致位移不单值,不连续。 6、Pie平面上的点所代表的应力状态有何特点? 该平面上任意一点的所代表值的应力状态1+2+3=0,为偏应力状态,且该平面上任一法线所代表的应力状态其应力解不唯一。 固体力学解答必须满足的三个条件是什么?可否忽略其中一个? 第二章应变 1、从数学和物理的不同角度,阐述相容方程的意义。 从数学角度看,由于几何方程是6个,而待求的位移分量是3个,方程数目多于未知函数的数目,求解出的位移不单值。从物理角度看,物体各点可以想象成微小六面体,微单元体之间就会出现“裂缝”或者相 互“嵌入”,即产生不连续。 2、两个材料不同、但几何形状、边界条件及体积力(且体积力为常数)等都完全相同的线弹性平面问题, 它们的应力分布是否相同?为什么? 相同。应力分布受到平衡方程、变形协调方程及力边界条件,未涉及本构方程,与材料性质无关。 3、应力状态是否可以位于加载面外?为什么? 不可以。保证位移单值连续。连续体的形变分量 x 、y、xy不是互相独立的,而是相关,否则导致位移不单值,不连续。 4、给定单值连续的位移函数,通过几何方程可求出应变分量,问这些应变分量是否满足变形协调方程? 为什么? 满足。根据几何方程求出各应变分量,则变形协调方程自然满足,因为变形协调方程本身是从几何方程中 推导出来的。 5、应变协调方程的物理意义是什么? 对于单连通体,协调方程是保证由几何方程积分出单值连续的充分条件。多于多连通体,除满足协调方程 方程外,还应补充保证切口处位移单值连续的附加条件。 6、已知物体内一组单值连续的位移,试问通过几何方程给出的应变一定满足变形协调方程吗?为什么?
材料力学应力状态
关键词:单元体的取法,莫尔应力圆的前提 有那么一个单元体后(单元体其中的一对截面上主应力=0(平面)或平衡(空间),也就是单元体的一对截面为主平面),才有这么 一个隔离体,才有那么一个莫尔应力圆和表达式 也就是:取的单元体不同,则单元体的应力特点不一样,从而用截面法求任意截面上的应力取隔离体列平衡方程时,隔离体的受力特点不同,从而球出来的表达式也不同,只有这种表达式才适合 莫尔应力圆。 因此拿到一个单元体后,不要急着应用莫尔应力圆,要先看它的特点适合不适合莫尔应力圆,也就是σα和τα的表达式球出来以后还是 不是下面的这个公式。
特别还要记住,这个公式里的夹角α是斜截面的外法线与σx 作用平
σy的形式。比如,面的外法线之间的夹角,这样公式中才是σx— 当α表示的是斜截面的外法线与σ1所在平面的夹角,那么公式就是σ1—σ2的形式;不论是谁减谁,应力圆的性状都不变; 1.首先,先有主平面和主应力的概念,剪应力为0的平面为主平面,主平面上的正应力为主应力; 2.然后,由于构件受力情况的不同,各点的应力状态也不一样,可以按三个主应力中有几个不等于零而将一点处的应力状态划分为三类: ?单向应力状态:只有一个主应力不等于零,如受轴向拉伸和压缩的直杆及纯弯曲的直杆内各点的应力状态。 ?二向应力状态(平面应力状态):有两个主应力不等于零,如受扭的圆轴,低压容器器壁各点的应力状态。 ?三向应力状态:三个主应力都不等于零,如高压容器器壁内各点的应力状态。 3.然后,根据受力宏观判断是单轴应力状态还是平面应力状态还是三轴应力状态,取单元体关键,单元体取的不同,单元体上的应力也不同,做莫尔圆的繁简程度也不同,对于平面应力状态,当然要用主应力=0的那个截面参与单元体截取; 4.单轴应力状态、平面应力状态、三轴应力状态是由主应力等于零的个数决定的,不受单元体取法的影响,也不是看单元体的三对截面上是否都存在正应力;比如单轴应力状态下,也可以取出一个单元体,让这个单元体的各平面上都有正应力和切应力,但是它仍然是单轴应力状态;同样,平面应力状态下,也可以取出一个单元体,让其各平面上都有正应力和剪应力,但它仍然是平面应力状态; 5.按不同方位截取的单元体,尽管作用在这些单元体上的应力不同,但是在它们之间却存在着一定的关系:因为二者表示的是同一点的应力状态,因而可以从一个单元体上的应力求出另一个与其方向不同的单元体上的应力。 6.既然怎么取单元体不影响一点的应力状态:无论你怎么取,应力状态就在那里,不会发生变化,那么就可以取主平
应用弹塑性力学课后习题答案
附录Ⅱ习题解答提示与参考答案 第二章应力理论 2-1 ζn=ζ1l2+ζ2m2,;式中l、m、n为斜截面外法线的方向余弦。 2-2 p=111.5A;ζn=26A;ηn=108.5A 2-3 提示:平面Ax+By+C z+D=0的外法线的方向余弦为:(式中i=1,2,3或A,B,C) 答案: 2-4 略 2-5 (a)ζ1=738.5;ζ2=600;ζ3=-338.5;ηmax=538.5;应力单位为MPa。 (b)ζ1=700;ζ2=600;ζ3=-600;ηmax=650;应力单位为MPa。 2-6 ζ1=3.732η0;ζ2=-0.268η0;α=15o。 2-7 (材料力学解) 应力单位为MPa。 (弹塑性力学解) 应力单位为MPa。 2-8 ζ1=107.3a;ζ2=44.1a;ζ3=-91.4a; ζ1主方向:(±0.314,0.900,0.305); ζ2主方向:(±0.948,±0.282,±0.146); ζ3主方向:(0.048,±0.337,0.940)。 2-9 ;ζ2=0;ζ3=-ζ1。 2-10、2-11 略 2-12 (1)略;(2)ζ8=ζm=5.333MPa;η8=8.654MPa。 2-13 p8=59.5;ζ8=25.0a;η8=54.1a。 2-14 上式中S为静矩。材料力学解不满足平衡微分方程和边界条件。
2-15 ,Q为梁横截面上的剪力。提示:利用平衡微分方程求解。2-16 ζ1=17.083×103Pa;ζ2=4.917×103Pa;ζ3=0,?=40o16′。2-17 略2-18 2。2-19 提示:将三个主方向的三组方向余弦分别两两一组代人式(2-12)证之。2-20 。2-21 在AA′上:ζx=-γy,ηxy=0;在AB上:ηxy=0,ζy=-γh;在BB′上:l1=cosα,l2=-sinα,l3=0;则应力分量满足关系式:2-22 。2-23 。2-24 ηzx=-ζz tanα;ζx=ζz tan2α。2-25 在x=-ytanα处,在x=ytanβ处: 2-26 A=0;B=-ρ1g;C=ρgcotβ-2ρ1gcot3β;。 2-27 (1)ζ1=99.6A;ζ2=58.6A;ζ3=-138.2A;ηmax=118.9A。 (2)ζ1=99.6A;ζ2=58.6A;ζ3=-138.2A;ηmax=118.9A。