立体定位技术
实验6 小动物脑立体定位技术
一、实验目的
1. 了解脑立体定位技术。
2. 掌握脑立体定位仪及脑图谱的使用方法。
二、实验原理
脑立体定位技术被广泛的运用于脑的损毁、刺激和脑电记录的精确定位中,成为
研究脑结构和功能必不可少的工具。脑立体定位技术主要是使用脑立体定位仪作为定位仪器,利用某些颅骨外面的标志(如前囟、后囟、外耳道、眼眶、矢状缝等)或其它参考点所规定的三度坐标系统,来确定皮层下某些神经结构的位置,以便在非直视暴露下对其进行定向的刺激、破坏、注射药物、引导电位等研究,是神经解剖、神经生理、神经药理和神经外科等领域内的重要研究方法。常用的实验动物,如大鼠、小鼠、猫等高等哺乳动物以及鸟类,其均有完全的外耳道,可用(耳棒)来定位。在确定了颅外标记之后,就可按脑立体定位图谱所提供的数据进行定位操作。
三、实验器材
江湾-Ⅰ型脑立体定位仪,MC-5微操作仪,常规手术器械,钻孔针,纱布,干棉球,酒精,0.4%戊巴比妥钠(麻醉剂,现配现用),生理盐水,1ml注射器,3%双氧水,
小白鼠。
四、实验步骤
1. 江湾Ⅰ型脑定位仪的使用
1.1 校验仪器
定位仪经过搬动或长期不用后,使用前需先加以校验。重点是检验电极移动架各滑尺是否保持直角,可用三角板测定各滑尺所成的角度是否是直角;各衔接部与螺丝有没有松动;滑尺是否太松;检查主框两臂的平行情况;最后观察固定头的装置两侧对称程度,小框是否与主框平行。检查仪器无故障后,可进行下列校验性操作:
(1)将两侧耳杆柱旋松,在主框上前后滑动,然后再按照原规定刻度装好,看两侧耳
杆尖是否完全对正。
(2)取下一侧耳杆,将一侧电极移动架装好,前后左右上下移动各滑尺,使装在电极
夹上的金属定位针尖正对耳杆尖的中心,记下各滑尺的刻度读数,再卸下移动架再装上,并按上法测定耳杆尖的部位,记下三个滑尺的读数,反复操作取平均数首先将放置水平的脑立体定位仪上的两个滑道,按实验的要求调节好合适的高度后。
(3)然后再用水平尺调正好两个滑道的前后、左右水平。这时再把安置在滑道上的手
动微推进器按上面的刻度调节垂直。
1.2 确定脑立体定位零点,小鼠脑定位的系统大致分两种:
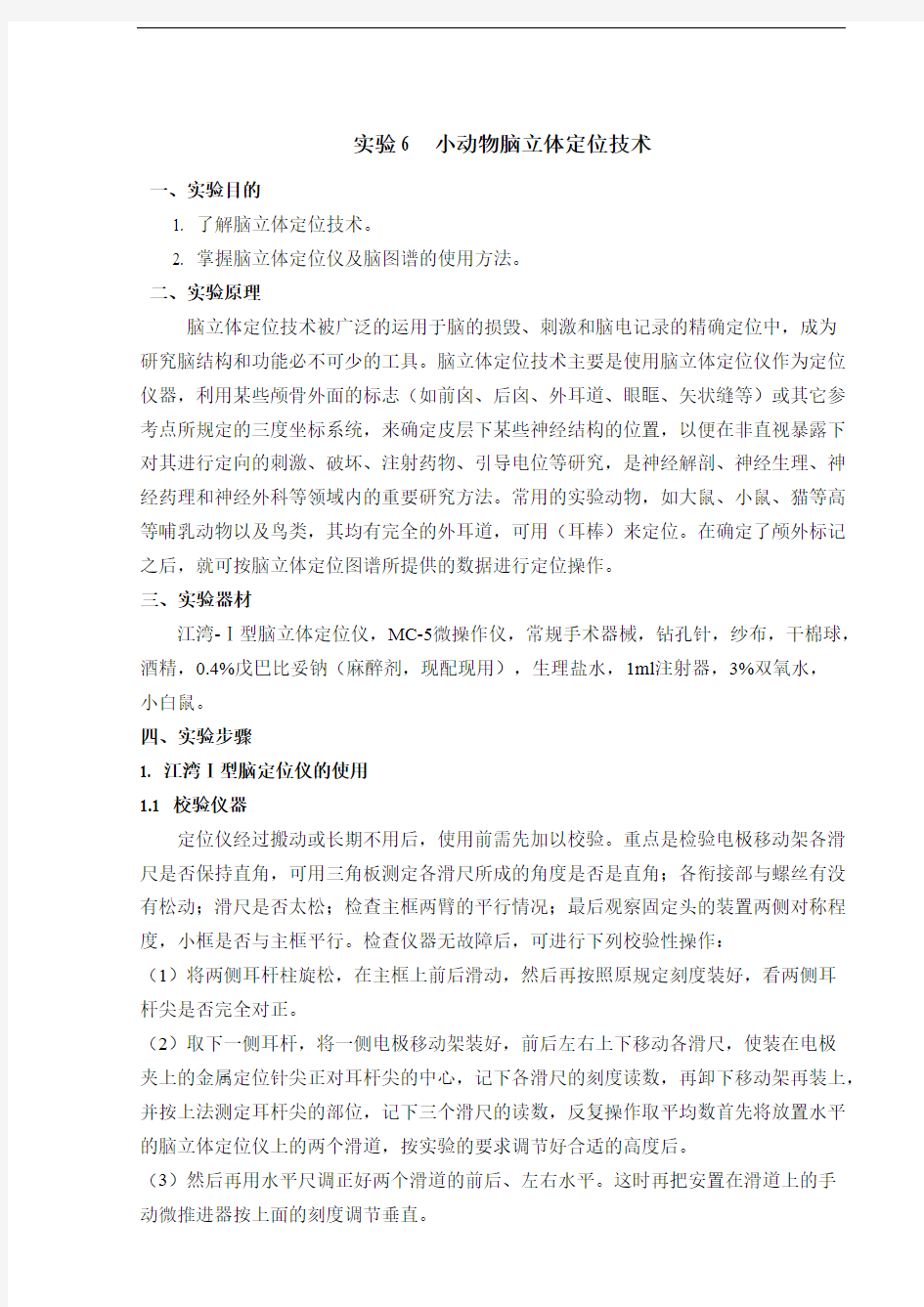
(1)用耳间线中心定位,首先将两个耳棒尖端在定位仪滑道中间部位彼此相接触(两个耳棒读数相同),旋紧镙丝。然后取下一侧耳棒,另一耳棒不动。调节移动推进器,使校验电极尖端与耳棒尖端的中心点相触,即为A点(即耳间线中心点),并记下刻度值。然后,将推进器水平移动到门齿钩的上方,将门齿钩平面与校验电极尖端相触。这时就定出外耳道中心点与门齿牙板上面上沿之间的水平切面0点,记为H0。这时,动物的前囟和后囟基本处在一个水平面上,相差0-0.1mm。另外,规定耳间线中心点以上为+,向下为-;向嘴侧为+,向尾侧为-。
(2)用颅骨标志定位(常用前囟),即以前囟为嘴尾侧0点,由前囟向嘴侧为+,向尾,其它与上面定位方法相同(图示)。
侧为-
2. 实验内容
(1)动物麻醉:小鼠,体重20-30g,称重后以0.4%戊巴比妥钠腹腔麻醉注射时必须缓慢,随时注意动物状态。
(2)小鼠头部固定:将小鼠的门齿固定于脑定位仪上颌固定器,然后把一侧的耳捧推入动物的外道后,使动物的头在处于两滑道正中。再将另一耳捧推入另一侧的外耳道。这时观察两个耳棒的刻度一致后,将两耳棒上的固定螺丝扭紧,在将牙齿固定器上压鼻
1
环压下后扭紧(鼻环、耳棒的松紧度调节适宜为好),这时从各个方向推压动物头部"均不会出现移动。
(3)开颅钻孔前的备皮:剪去动物头部毛,用2%碘酒及75%酒精棉球作头部皮肤的消毒,沿矢状缝作一3cm长的皮肤切口,分离皮下组织,用双氧水清洁颅骨表面的筋膜及肌肉并剥离,推开骨膜,暴露前囟、人字缝及矢状缝。
(4)确定标准中线:将金属定位针向下移动到矢状缝上方后,再前后移动定位针,使定位针定位到前囟。
(5)小鼠海马定位:用定位针在前囟后2mm, 矢状缝旁开2.5mm处定位一点,即为海马的平面位置,然后在此点上用钻孔针在颅骨上钻一小圆孔。
(6)注射药物:小鼠海马则位于该圆孔下2 mm,将1ml注射器吸入药物安置到MC-5微操作仪上,操作仪器使注射器针头由小鼠脑钻孔处下降2mm时完成药物注射到小鼠脑海马处。
(7)制作脑组织切片:将小鼠脑制作成切片,显微观察小鼠脑中红染料位置来验证小鼠脑海马中是否定位准确。
2
高精度超短基线在水下定位中的应用
高精度超短基线在水下定位中的应用高精度超短基线定位系统在水下定位中的应用 1 2张粤宁刘鹏 (1.武汉长江航道救助打捞局,武汉430014;2.上海地海仪器有限公司,上海200233) 摘要:声学定位系统(Acoustic Positioning System)的技术研究和应用开发在现代海洋科学调查和水下施工中起着重要作用。本文以某品牌超短基线定位系统为例,就超短基线 hort BaseLine)声学定位系统的原理、应用范围等几个方面展开讨论,同时介绍(Ultra S 了高精度超短基线工程中的实际应用,对使用过程中影响定位性能的主要因素进行了简单分析。 关键词: 超短基线水下定位 1 概述 20世纪90年代以来,世界先进国家的海洋调查技术手段逐步成熟与完善,其中超短基 线(简称USBL)水下设备大地定位技术也获得了长足的发展。高精度水下定位系统具有 广泛的用途,在海洋探测研究、海洋工程、水下建筑物施工、潜水员水下作业、水下考 古、海洋国防建设等方面,都离不开水下定位系统为其提供高精度、高质量的定位资料, 因此高精度水下定位技术对维护国家领土权益和国民经济建设都具有重要意义。
1(1关于水下声学定位系统 20世纪50,60 年代,在国际上,随着光、声、磁等技术的不断发展,在大力开发海洋自然资源和海洋工程的进程中,水下探测技术得到了较大发展,相继开发了一系列先进的、高效能的水下探测设备:在各种水下检测的光、声、磁技术中,由于水下光波衰减很快,即使是波长最长、传播最远的红外光波在水中传播到了几米以后也衰减完了,而声波和电磁波在水中有良好的传播性,因而,声呐、磁探和超短基线成为水下检测的有效方法。 声学定位系统最初是在19世纪60年代的时候被开发出来用于支持水下调查研究。从那时起,这类系统便在为拖体,ROV等水下目标的定位中成为了重要角色。声学定位系统能够在有限的区域内提供非常高的位置可重复精度,甚至在远离海岸。对大多数用户来说,可重复性精度要比绝对精度重要。 在声学定位系统中,有3种主要的技术:长基线定位(LBL),短基线定位(SBL),和超短基线定位(SSBL/USBL),有些现代的定位系统能组合使用以上技术。 长基线(LBL):长基线定位能在宽广的区域内提供高精度的位置,它需要至少3个应答器组 成的阵列部署在海底上的已知点上,水面舰只安装一个换能器。换能器测量出到水底应答器的斜距,从而计算出自身的坐标位置。
智慧电厂定位、三维及人员定位技术
智慧电厂的本质是信息化与智能化技术在发电领域的高度发展与深度融合,体现在大数据、物联网、可视化、先进测量与智能控制等技术的系统化应用,主要特征是泛在感知、自适应、智能融合与互动化。在智能制造与智慧能源的发展框架下,智慧电厂与智能发电技术得到了快速发展,成为能源互联网技术发展的重要组成部分。 智慧电厂也称为智能电厂或智能电站,其技术核心是信息融合与智能发电技术,目前在水电、燃气轮机电厂及新能源电站均有不同程度的研究与应用,智能核电概念也已提出,但范围最广、复杂程度最高的常规燃煤火电厂的智能化发展才是智慧电厂研究与应用的最重要领域。智能发电是智能制造的一部分,而智能制造则是中国国家发展战略《中国制造2025》的主攻方向。智能制造的本质就是机器代人,通过人与智能化的检测、控制与执行系统实现对人类专家的替代,体现在生产制造过程的柔性化、智能化和高度协同化,将数据挖掘、遗传算法、神经网络和预测控制等先进的计算机智能方法应用于工程设计、生产调度、过程监控、故障诊断、运营管控等,实现生产过程与管理决策的智能化。 在发电厂智能化技术的系统性研究与应用方面,国内外都还处于起步阶段,国外研究重点更倾向于新能源发电,如旨在有效运用分布式发电资源的VPP(虚拟电厂)技术,可提高分布式发电的可控性。而对于常规火电厂,西门子、GE等部分制造厂商,则将关注重点集中在区域数据共享与可视化辅助运维技术的应用方面,尚未有系统性成果见诸于公开文献。国内在技术体系方面的研究进展较快,部分关键技术已逐步进入应用研究,自主研发的技术进步显著。 随着计算机运算能力与软件应用水平提高,大范围的三维空间设计建模成为可能。通过三维空间定位,实现设备、管道、仪表取样点及隐蔽工程信息可视化。基于UWB技术的三维定位结合巡检人员智能终端,借助图像识别与无线通信技术,实时关联缺陷管理数据库,可实现现场设备的智能巡检与自动缺陷管理。借助设备与人员定位,还可同时实现智能安防与区
水下和海底大地坐标的精确测量
文章编号:1009-671X(2003)09-0019-03 水下和海底大地坐标的精确测量 张 炜1,王大成2 (1.中国人民解放军91550部队,辽宁大连 116000;2.哈尔滨工程大学水声工程学院,黑龙江哈尔滨 150001)摘 要:潜艇水下高精度定位,长期以来一直是水下导航定位领域的一个难题.为了解决潜艇在水下长时间航行过程中的高精度定位问题,提出了一种比较实用的解决方案.该方案构建了由DGPS 定位和水声定位相结合的水下定位系统.系统采用系缆浮筏作为潜艇,利用DGPS 进行水下定位的中继站,利用水声相对定位技术将DGPS 水面定位向水下延伸,使潜艇在工作潜深就可以直接获得自身的大地经纬度坐标.系统将DGPS 的优良性能与超短基线在水下定位中的优势很好地结合在一起,其定位精度可以保证与DGPS 水面定位精度在同一量级.关 键 词:DGP S;高精度;水下定位中图分类号:T B568 文献标识码:A Precision measurement of coordinates of underwater and sea bed ZHANG Wei 1,WANG Da cheng 2 (1.T he Chinese Peo ple s Liberation Army No.91550,Dalian 116000,China;2.School of U nder water Acoust ic Engineer ing ,Harbin Eng ineering U niversity ,Har bin 150001,China) Abstract:For a long time,high precision positioning for underw ater submarine has been a difficult problem in the field of underw ater navigation and positioning.The traditional positioning for submarine depends on inertial navigation system (INS).But the positioning error of INS accumulates along w ith time.In order to solve the problem of high precision positioning for underw ater subm arine,this paper proposed a relatively practical scheme.T his scheme constructs an underw ater positioning system based on the combination of DG PS and acoustical positioning.This method makes use of acoustical relative positioning technique for ex tend ing the DGPS positioning technique for surface applications to underw ater cases.With this positioning sys tem ,the submarine can directly get its long itude and latitude,and the positioning precision can ensure the same level as the surface application cases of DGPS. Key words:DGPS;high precision;underwater positioning 大地坐标点的测量有两种工作状态需要考虑.第一,水中和海底运动目标大地坐标的实时测量.这在ROV 、水下机器人等的水下作业和潜艇、潜器、水下无人作战平台等军事武备水下实验过程中是经常遇到的.第二,固设于海底处的大地测量控制点坐标的测量.这是被称为 海洋大地测量!任务的一项基础性工作[1],它对于潜艇水下航行、各种水下作业、海底地图测绘等有重要作用. 近年来,由于差分式全球定位系统(DGPS)和高精度水声定位技术的飞速发展,为水下以及海底高精度大地坐标的精确测量提供了更先进的技术手段.尤其是国家海事局在北起大三山、南至防城和三亚港,沿整个海岸线建成的包括总计有20个差分站组成的RBN/DGPS 系统,使无线电差分信号有效地覆盖了我国以海岸为基线的大约300km 的水域范围.再加上美国出于自身商业利益的考虑,取消了C/A 码上的精度干扰,使得DGPS 系统的应用更加方便和有效. 近年来国内外的水声定位技术不断发展,定位精度不断提高,轻便易用的超短基线水声定位系统(USBL 系统)原有的相位模糊(目标定位位置跳象限)、在与基阵面垂直向下的方向和水平方向存在低精度区等缺点,已被克服,加上采用一系列的近代信号处理技术,使USBL 系统能以稳定的高精度测量结果参与水下或海底点坐标测量系统[2,5]. 收稿日期:2002-06-28. 作者简介:张 炜(1961-),男,工程师,主要研究方向:测控技术. 第30卷第9期 应 用 科 技 Vol.30,?.92003年9月 Applied Science and Technology Sep.2003
如何实现人员精确定位
如何实现人员精确定位 ——基于WSN技术的第三代人员定位系统 作者:中国矿业大学教授华钢安徽烽讯电子科技公司金灏 井下人员定位系统示意图 随着我国对煤矿安全日益重视,监管力度不断加强,大中型煤矿和众多乡镇小煤矿均已大量装备了煤矿安全监控系统,有效地遏制了重大瓦斯煤尘爆炸事故的发生。 生产安全的核心是人的安全。煤矿迫切需要利用相应的矿井人员跟踪定位设备,全天候对煤矿入井人员进行实时自动跟踪和考勤,随时掌握每个员工在井下的位置及活动轨迹、全矿井下人员的位置分布情况以及井下人员位置。矿用人员定位系统是集井下人员考勤、跟踪定位、灾后急救、日常管理等于一体的综合性应用系统。这一科技成果的实现,将为煤炭企业的安全生产、日常管理以及事故急救带来可靠指挥依据。 实现人员跟踪定位 矿用人员定位跟踪系统以标示卡为基本采集单位,完成对下井者地理信息和工作信息的采集、存储、处理、显示和打印,同时可以对各种异常状态进行预警、报警。系统主要由标识卡、读卡器、人员检测分站、通信接口、服务器、打印机等组成。 从结构上划分,人员定位跟踪系统主要包括主站、分站和移动分站。主站模块既是系统的信息处理中心,又是用户的信息获取源。从各种总线传输汇总的数据,经过主站模块完成数据筛选、信息存储、异常处理后,与用户进行信息交流;分站模块包括各种基站、读卡器和标示卡,共同形成一个动态信息采集监控区,并通过一定的信息传送方式,将数据汇总至主站模块。 从功能上划分,人员定位跟踪系统基本功能包括实时数据采集与存储、井下人员的电子考勤、动态定位、地图管理、历史路径查询与显示、数据联网、报表生成,以及
报警提示井下人员进入危险区域及限制区域,矿难时提供井下人员搜救帮助等功能。 以WSN技术为核心 人员定位跟踪系统的核心主要涉及传感器及其组网技术与人员信息的地理化显示处理技术。特别是前者的升级换代,从根本上标志着人员定位跟踪系统的发展阶段;后者作为决策支持的主要工具,体现了系统智能化、专家化的程度。 传感器及其组网技术 在无线技术基础上的煤矿井下人员定位系统经历了三个主要阶段,前两个阶段都采用RFID技术。RFID的中文全称是无线射频识别技术,它利用无线电波对记录媒体进行读写。与其他识别技术相比,RFID技术具有防水、防磁、耐高温、使用寿命长、读取距离大、标签上数据可以加密、存储数据容量更大、存储信息更改自如等优点。但是这种技术的读卡器价格昂贵,如果要实现人员位置的密集跟踪,系统造价将难以承受。而人员检测与管理系统作为一个综合性系统,与安全监控系统具有同等重要性,若只实现小范围的人员检测,难以体现其价值,更难以发挥其应用前景。 随着现代传感器网络的发展,无线传感器网络(WSN)技术走向成熟,并在多个领域有成功应用。因此,基于WSN技术的第三代人员定位跟踪系统成为近年来的研究热点。WSN由部署在监测区域内大量的廉价微型传感器节点组成,通过无线通信方式形成一个自组织的网络系统,其目的是协作地感知、采集和处理网络覆盖区域中被感知对象的信息,并发送给观察者。 WSN家族非常庞大,包含多个协议族。根据煤矿应用的特点,第三代人员定位跟踪系统不约而同地把研究的焦点取在Zigbee标准上。Zigbee是基于IEEE 802.15.4无线标准研制开发的关于组网、安全和应用软件等方面的技术标准。完整的Zigbee协议套件由高层应用规范、应用会聚层、网络层、数据链路层和物理层组成。 应用汇聚层是把不同的应用映射到Zigbee网络上,主要包括安全属性设置和多个业务数据流的汇聚等功能;网络层则可实现网络的自组织和自维护,从而降低了网络的维护成本。Zigbee技术具有低功耗、短时延、低速率、近距离、低成本、大容量、高安全性、免执照频段等特点,因此在短距离无线通信领域有着较大的优势。而煤矿巷道在空间上本身具有局限性,若采用基于Zigbee技术的低成本传感器密集分布,将为当前的井下人员跟踪带来质的飞跃。 人员信息的地理化显示技术 用户并不关心传感器网络采用何种类型,其主要的系统体验来源于人员地理信息的可视化效果。如何将井下人员信息直观地传达给用户,并在灾害过程中为决策者提供临场感,是人员定位跟踪系统面临的另一难题。 人员定位系统的未来
人员精确定位系统报告
井下精确定位系统可行性 研究报告 机电装备研究所 2018.4.3 一、义煤集团目前存在的问题 1、矿用电机车 煤炭生产过程中,矿用电机车是井下轨道煤炭运输及辅助运输重要的动力设备,电机车按供电方式分为架线式和蓄电池式两种,轨道数量有单轨道和双轨道两种。由于电机车具有结构简单,维护方便,运输费用低等特点,在煤矿水平巷道中,作为运输工具起着很大作用,得到广泛应用。为确保煤矿井下运输安全,《煤矿安全规程》对电机车运输的轨距、轨型、运行速度、机车的制动距离以及两台机车在同一轨道同一方向行驶时,必须保持不小于100m的距离等做出了明确的规定。
由于煤矿井下运输巷道沿途灯光昏暗,工况恶劣,如果电机车司机注意力稍有不集中,反应迟钝,观察判断失误以及道岔错位等原因,电机车很容易出现事故,轻者掉轨,误开到其它轨道上,重者使两电机车行驶到同一轨道上造成迎面相撞或追尾事故,特别是迎面相撞事故由于极大的惯性,造成的后果更加严重。可能会损毁轨道、路基、车辆和运送的设备,甚至会造成冒顶塌方、火灾瓦斯事故。若是运送人员的车辆相撞后果更为严重,将造成大量人员受伤。而目前电机车的制动一般都是人工操作电阻制动和手闸制动两种,刹车时易产生剧烈抖动或刹车过猛而造成人为事故。这种机车相撞事故一旦发生危害巨大,后果惨重,极大地影响了煤矿企业正常有序的安全生产。 除电机车之间出现碰撞事故外,电机车撞人事故也常有发生。长期以来大巷机车运输事故在主巷运输事故中所占比例一直较大,其发生的类型一般有以下几类:①大巷作业人员避让列车不及被碰挂致伤;②大巷人行道宽度不够,使巷道内人员无法安全避让列车,被列车碰挂致伤;③无乘车候车室的大巷,下班后候车的工人因劳累睡在线路旁,被列车碰挂致伤;④乘车人员乘坐人车时,未挂好防护链且因劳累睡着后,意外被列车甩出车外摔伤; ⑤跟车工摘挂钩时,因与司机联络失误或机车司机操作失误,兑车不当,被挤碰致伤;⑥行人在从石门巷道快速跨越大巷轨道时,被运行中的列车碰伤等。 巷道欠维护,上顶冒落,机车和矸石相撞,也时有发生。 要消除以上事故,一是要完善巷道设施;二是职工要做好自我保护;更重要的是要在完善机车安全设施,主动做好大巷行车安全防范工作。 2、人员定位 煤矿安全生产事关煤矿系统人员的生命和财产安全,各级政府一贯高度重视煤矿安全生产问题,并采取了一系列措施不断加强安全生产工作。通过不断的努力,煤矿安全生产状况总体上趋于稳定好转,但煤矿生产的主体集中在井下,随着机械化开采程度的普及,井下巷道不断向四面延伸,巷道纵横交错,人流、车流错综复杂。作为地面生产指挥控制核心部门,实时了解井下人员、车辆、原煤及材料的流动运行情况和跟踪监测就显得尤为重要,一旦遭遇各种井下事故,必须在最短的时间内获取事故现场的人员状况及分布情况,将为后续工作提供主要参考依据,以减少盲目性,因此,改变目前煤矿企业对井下人员的管理模式,优化井下人员定位管理系统,实现井下人员的精确定位和管理信息的精确化、精细化已成为所有煤矿企业日趋关心的问题。 煤矿井下人员定位系统能够及时、准确的将井下各个区域人员及设备的动态情况反映到地面计算机系统,使管理人员能够随时掌握井下人员、设备
大鼠脑立体定位图
List of Structures Names of the structures are listed in alphabetical order. Each name is followed by abbreviation of the structure. 1-10 cerebellar lobules 1-10 3rd ventricle 3V 4th ventricle 4V A A1 noradrenaline cells A1 A11 dopamine cells A11 A12 dopamine cells A12 A13 dopamine cells A13 A2 noradrenaline cells A2 A4 noradrenaline cells A4 A5 noradrenaline cells A5 A7 noradrenaline cells A7 A8 dopamine cells A8 abducens nucleus 6 accessory abducens nucleus Acs6 accessory abducens/facial nucleus 7 accessory abducens/facial nucleus Acs6/7 accessory facial nucleus Acs7 accessory neurosecretory nuclei Acc accessory nucleus of the ventral horn Acs accessory olfactory bulb AOB accessory olfactory tract aot accessory optic tract aopt accessory trigeminal nucleus Acs5 accumbens nucleus Acb accumbens nucleus, core AcbC accumbens nucleus, rostral part AcbR accumbens nucleus, shell AcbSh acoustic radiation ar acoustic stria as agranular insular cortex AI agranular insular cortex, dorsal part AID agranular insular cortex, posterior part AIP agranular insular cortex, ventral part AIV alar nucleus Al alveus of the hippocampus alv ambiguus nucleus Amb amygdalohippocampal area AHi amygdalohippocampal area, anterolateral part AHiAL amygdalohippocampal area, posteromedial part AHiPM amygdaloid fissure af amygdaloid intramedullary gray IMG amygdalopiriform transition area APir amygdalostriatal transition area AStr angular thalamic nucleus Ang ansa lenticularis al ansoparamedian fissure apmf anterior amygdaloid area AA anterior amygdaloid area, dorsal part AAD anterior amygdaloid area, ventral part AAV anterior commissure ac anterior commissure, anterior part aca anterior commissure, intrabulbar part aci anterior commissure, posterior part acp anterior cortical amygdaloid nucleus ACo anterior hypothalamic area AH anterior hypothalamic area, anterior part AHA anterior hypothalamic area, central part AHC anterior hypothalamic area, posterior part AHP anterior lobe of the pituitary APit anterior olfactory nucleus, dorsal part AOD anterior olfactory nucleus, external part AOE anterior olfactory nucleus, lateral part AOL anterior olfactory nucleus, medial part AOM anterior olfactory nucleus, posterior part AOP anterior olfactory nucleus, ventral part AOV anterior perifornical nucleus APF anterior pretectal nucleus APT anterior pretectal nucleus, dorsal part APTD anterior pretectal nucleus, ventral part APTV anterior tegmental nucleus ATg anterodorsal preoptic nucleus ADP anterodorsal thalamic nucleus AD anteromedial thalamic nucleus AM anteromedial thalamic nucleus, ventral part AMV anteroventral periventricular nucleus AVPe anteroventral thalamic nucleus AV anteroventral thalamic nucleus, dorsomedial part AVDM anteroventral thalamic nucleus, ventrolateral part AVVL aqueduct (Sylvius) Aq arcuate hypothalamic nucleus Arc arcuate hypothalamic nucleus, lateroposterior part ArcLP arcuate hypothalamic nucleus, medial posterior part ArcMP arcuate nucleus, dorsal part ArcD arcuate nucleus, lateral part ArcL arcuate nucleus, medial part ArcM area postrema AP ascending fibers of the facial nerve asc7 B B4 serotonin cells B4 B9 serotonin cells B9 Barrington's nucleus Bar basal nucleus (Meynert) B basilar artery bas basolateral amygdaloid nucleus BL basolateral amygdaloid nucleus, anterior part BLA basolateral amygdaloid nucleus, posterior part BLP basolateral amygdaloid nucleus, ventral part BLV basomedial amygdaloid nucleus BM basomedial amygdaloid nucleus, anterior part BMA basomedial amygdaloid nucleus, posterior part BMP bed nucleus of stria terminalis, fusiform part Fu bed nucleus of stria terminalis, supracapsular part BSTS bed nucleus of the accessory olfactory tract BAOT bed nucleus of the anterior commissure BAC bed nucleus of the stria terminalis BST bed nucleus of the stria terminalis, intraamygdaloid division BSTIA bed nucleus of the stria terminalis, lateral division BSTL bed nucleus of the stria terminalis, lateral division, dorsal part BSTLD bed nucleus of the stria terminalis, lateral division, intermediate part BSTLI bed nucleus of the stria terminalis, lateral division, juxtacapsular part BSTLJ bed nucleus of the stria terminalis, lateral division, posterior part BSTLP bed nucleus of the stria terminalis, lateral division, ventral part BSTLV bed nucleus of the stria terminalis, medial division BSTM bed nucleus of the stria terminalis, medial division, anterior part BSTMA bed nucleus of the stria terminalis, medial division, posterior part BSTMP bed nucleus of the stria terminalis, medial division, posterointermediate part BSTMPI
立体定位技术
实验6 小动物脑立体定位技术 一、实验目的 1. 了解脑立体定位技术。 2. 掌握脑立体定位仪及脑图谱的使用方法。 二、实验原理 脑立体定位技术被广泛的运用于脑的损毁、刺激和脑电记录的精确定位中,成为 研究脑结构和功能必不可少的工具。脑立体定位技术主要是使用脑立体定位仪作为定位仪器,利用某些颅骨外面的标志(如前囟、后囟、外耳道、眼眶、矢状缝等)或其它参考点所规定的三度坐标系统,来确定皮层下某些神经结构的位置,以便在非直视暴露下对其进行定向的刺激、破坏、注射药物、引导电位等研究,是神经解剖、神经生理、神经药理和神经外科等领域内的重要研究方法。常用的实验动物,如大鼠、小鼠、猫等高等哺乳动物以及鸟类,其均有完全的外耳道,可用(耳棒)来定位。在确定了颅外标记之后,就可按脑立体定位图谱所提供的数据进行定位操作。 三、实验器材 江湾-Ⅰ型脑立体定位仪,MC-5微操作仪,常规手术器械,钻孔针,纱布,干棉球,酒精,0.4%戊巴比妥钠(麻醉剂,现配现用),生理盐水,1ml注射器,3%双氧水, 小白鼠。 四、实验步骤 1. 江湾Ⅰ型脑定位仪的使用 1.1 校验仪器 定位仪经过搬动或长期不用后,使用前需先加以校验。重点是检验电极移动架各滑尺是否保持直角,可用三角板测定各滑尺所成的角度是否是直角;各衔接部与螺丝有没有松动;滑尺是否太松;检查主框两臂的平行情况;最后观察固定头的装置两侧对称程度,小框是否与主框平行。检查仪器无故障后,可进行下列校验性操作: (1)将两侧耳杆柱旋松,在主框上前后滑动,然后再按照原规定刻度装好,看两侧耳 杆尖是否完全对正。 (2)取下一侧耳杆,将一侧电极移动架装好,前后左右上下移动各滑尺,使装在电极 夹上的金属定位针尖正对耳杆尖的中心,记下各滑尺的刻度读数,再卸下移动架再装上,并按上法测定耳杆尖的部位,记下三个滑尺的读数,反复操作取平均数首先将放置水平的脑立体定位仪上的两个滑道,按实验的要求调节好合适的高度后。 (3)然后再用水平尺调正好两个滑道的前后、左右水平。这时再把安置在滑道上的手 动微推进器按上面的刻度调节垂直。
(完整版)精确定位系统解决方案设计
人员精确定位系统方案
第一章引言 自十一五以来,我国加大了基础设施建设力度,中国交通建设事业进入了快速发展轨道。尤其在高速公路、铁路、城市轨道方面的建设突飞猛进。在公路、铁路建设方面,道路建设路线逐渐由平原、微丘向山区高原挺进,隧道、桥梁等结构物占线路的比重越来越大,隧道建设工程数量持续增长;在城市轨道建设方面,地铁具有节省土地、减少噪音、减少污染、节省资源等优点,成为各城市解决拥堵、提升城市交通运输能力的重要手段。由于隧道及城市地铁建设的造价高、运营管理相对复杂、施工环境恶劣、事故发生频率较高,常要求对隧道中人员数量进行统计、对施工现场环境进行监控。 目前市场上隧道安全监控系统中都没有与外界直接通话的无线通信系统,在遇到突发事故,如崩塌、涌水涌泥等事故,不能及时向隧道监控室汇报,很容易贻误抢险时机。如果有无线通信系统,施工人员在隧道中工作,可随时将隧道的掘进和安全情况汇报到隧道监控室,便于调度和及时处理突发事故。 当遇到隧道突发事故,对隧道施工人员的抢救缺乏可靠的位置信息,也缺乏语音通信手段,抢险救灾、安全救护的效率仍然不高,效果不理想。由于通信网络不畅,通信手段单一,网络承受能力差,往往造成领导层信息不畅通,指挥不足,数字不准,不利于事故的抢险,极易造成事故损失的扩大。隧道对利用相应的人员跟踪定位设备,全天候对施工人员进行实时自动跟踪和考勤,随时掌握每个员工在隧道的位置及活动轨迹、全隧道人员的位置分布情况等需求迫切。 苏州任辉物联科技有限公司是一家集研发、生产、销售、服务为一体的新型高科技企业,公司多年来专业致力于提供通道闸系统,门禁系统的开发、整合与应用。凭借多年的经验积累和不断的技术创新,我们有能力为客户提供合理的智能化考勤、门禁、消费、工地门禁通道系统解决方案,建设一流的系统工程,以优质的售后服务和严格的培训机制保证系统长期、连续、稳定
水下砼灌注桩钢筋笼的准确定位及防止其上浮的措施
水下砼灌注桩钢筋笼的准确定位及防止其上浮的措施 1 保证安装在砼灌注桩中钢筋笼位置的准确的方法1.1 桩基定位要准确和做好保护桩的工作在桩施工前,首先要进行桩基位置的定位,桩位的准确是保证桩基及钢筋笼子位置准确的前提条件,这里就涉及到工程施工中桩基的定位的问题,施工员的工作不仅要把桩基的位置找准,而且还要做好保护桩的工作,以备桩基施工钢筋定位等后期使用。施工现场都要出入一些大型工程车辆,一不注意就将事先布置好的保护桩碾压破坏掉,因此在做保护桩的时候,考虑的是不仅能方便恢复桩位点,而且还要尽量避免做好的保护桩遭到破坏。以上只是最基本的保证桩基位置准确的方法,更重要的是保证钢筋笼在桩基中混凝土位置的准确,下面进行一些简要的介绍。1. 2 护筒的质量、规格要满足施工的要求钻孔使用的护筒要圆而且制作护筒的钢板不能小于8 毫米(冲击钻施工时用的护筒的钢板不能小于12 毫米),护筒的直径应比桩基的直径大约200~300 毫米左右即可(冲击钻施工时护筒的直径要比上述值适当大些),埋设护筒时使其中心与桩位的中心重合,(规范中规定误差不能超过50 毫米,实际操作中要控制在20 毫米内),因为护筒是保证钢筋笼位置准确的第一个屏障,钢筋笼子要通过护筒安装进桩基钻孔内。另外护筒周围的回填土要尽量用不易渗水的粘土或煤矸石粉沫等回填,并要夯打结实。防止钻孔施工时外溢的泥浆渗过护筒周围的回填土,从而使护筒的位置倾斜或者发生位置改变。1. 3 做到钻杆中心和桩位中心重合埋好护筒后开始稳钻机,钻机的基础平
台要平整和结实,稳钻机时最重要的是保证钻杆的中心和桩位的中心要重合,并且要保证钻机的竖直,使钻机的磨盘中心和桩位的中心重合为止(通过吊线坠检查两者误差不宜超过10 毫米);冲击钻是使其钢丝绳中心和桩位的中心重合,经校和无误后才能制备泥浆准备钻孔。在钻孔的过程,通过保护桩恢复桩位中心,在钻孔时,要经常检查、校和钻杆的中心是否与桩位中心重合。1.4 壁杆与吊线坠相结合的方法来控制钢筋笼子的位置准确性为了保证安装后的钢筋笼能在钻孔灌注桩的中心位置,通常在安装钢筋笼之前,用长6m~8m,直径50~80mm 的钢管在一端焊接上?型的挂钩,制作4~6 个壁杆,均匀挂在护筒的四周后,才能开始安装钢筋笼子。在护筒的周围均匀安装4~6 个壁杆的目的是能使钢筋笼在壁杆的挤靠下,在钻孔内保持垂直,同时也能有效防止钢筋笼嵌入孔壁的泥里,设计上在钢筋笼周围上焊接几个长几十厘米长的]型的钢筋来做混凝土的保护层几乎是没有用的,经过实践检验,壁杆的作用基本上能控制住钢筋笼的位置,使其不会有产生太大的偏差,使钢筋笼子的位置基本上能满足规范规定的要求。精确的控制还要用吊线坠来实现,在安装完钢筋笼后,通过保护桩恢复桩位的中心点,然后抽孔内的泥浆,直到漏出钢筋笼的顶面,在钢筋笼的顶端挂十字线,用线坠来校和钢筋笼上挂的十字线中心与桩位的中心是否重合,否则用大锤、钢管敲打、撬动钢筋笼的吊筋使其中心与桩位的中心重合为止。但当钢筋笼的顶面至泥浆的上面距离较大时,抽泥浆的方法往往容易造成塌方,因此用吊线坠的方法就不再适用。
1.套管精确定位技术总结
套管精确定位技术总结 作者:许泽龙项目名称:陕西省肿瘤医院项目部 1.新技术产生的背景 建筑物在人类生活中发挥着无可替代的作用,但是随着原材料价格的上涨,对于建筑公司来说,如何在不影响建筑物质量的前提下降低成本便成为了需要土建与安装深入研究的重要课题。陕西省肿瘤医院住院科研楼工程特点是井道、卫生间多且井道处底板为二次浇筑。安装工程在施工前期,其主要工作是预留预埋,因此如何做好这项工作且降低成本便显得尤为重要。 2.技术特点 建筑穿楼板套管的定位目前大多项目采用的方式基本为先定出套管距梁柱的距离,只要是梁柱上下层不发生变化,即以此距离为参照预埋各层套管。这种方法随意性大,前期做起来相对快捷简便,但在后期安装管子过程中往往会出现预留洞上下层偏差较大的情况,管子无法安装,于是又对预留洞进行修正。这样就增加了后期安装施工的工作量与工作难度,从而也很大程度上失去了前期预留的意义,因此如何能精确的预留预埋显得尤为重要。 而新技术则是对套管进行了精确定位,先是对原设计的管道位臵进行了重新排布,使其更加的整齐美观,又做出了支架方案,使其固定牢固,且精确定位后原设计后浇的管道井可以与主体一并浇筑,套管精确定位后不再拔出,既为土建免去了后期浇筑的麻烦,也免去了我们修洞的麻烦,一举两得。这种新工艺得到了甲方与土建的一致肯
材料器具具准备套管的切割 多层 复外耳内耳 焊接 套管 套管定 套管预 定与高度赞扬。 3.适用范围 适用于建筑中的管道井套管的预留预埋。 4.技术原理 利用高科技产品“红外定位仪”进行上下层对应点之间垂直共线定位。 5.技术流程 6.材料与器具 耳的接 割定位 套管核 预埋管维护
鼠脑立体定位仪技术参数-连云港第一人民医院
数显式鼠脑立体定位仪技术参数 连云港市第一人民医院 **技术参数要求 一、项目概述 本次商谈的内容为连云港市第一人民医院**采购,卖方负责将**运抵买方指定机房,完成安装,检测、验收合格,交付买方使用,即交钥匙工程。 二、主要技术参数 数显式大/小鼠脑立体定位仪参数 1、定位仪有恒温功能 2、控温范围:室温~60℃ 3、读数精度:≤0.01mm 4、显示:LCD 显示屏(X、Y、Z 三轴) 5、功能键:置零键(CLR/SET)、相对值/绝对值(REL/ABS): 相 对值/绝对值、毫米/英尺:(mm/inch)、功能键(F/ENTER) 6、材质:合金材料 7、尺寸:350×250×340mm 8、操作臂 360 度回转,摆动幅度 180 度 9、计数精度:±0.01mm 10、三维推进器精度:±0.01mm 11、三维推进行程:80mm 12、工作电源:1.5V 13、可进行上下、左右、前后、旋转等精确定位 14、控温范围:室温~60℃(推荐 34~38℃) 15、工作条件:温度 0 - +40℃;相对湿度<80% 16、储运温度:-10 - +60℃ 17、重量:5.5kg 18:含大鼠适配器、小鼠及幼大鼠适配器、-含18度和45度耳杆 19、附大鼠脑图谱 1 本 与鼠脑立体定位仪配套的配件 微量注射泵: 1.用于脑立体定位实验 2.可配注射器规格:0.5ul-1000ul 3.高分辨率彩色触摸屏,触摸板具有“锁定”功能 4..额定线性推力: 5Kg 5.流量速率:3.66ml/min(0.5ul注射器)-3.818ml/min(1000ul注射器) 6.精确度:±0.5% 7.配备微量注射器-尖头/10ul/0D:0.50mm,10各. 微型手持式颅钻:
室内三维定位技术
室内三维定位技术 一、概述 室内定位参考百科的描述为:在室内环境无法使用卫星定位时,使用室内 定位技术作为卫星定位的辅助定位,解决卫星信号到达地面时较弱、不能穿透 建筑物的问题。最终定位物体当前所处的位置。主要采用无线通讯、基站定位、惯导定位等多种技术集成形成一套室内位置定位体系,从而实现人员、物体等 在室内空间中的位置监控。 随着智能手机的普及以及移动互联网的发展,地图与导航类软件将进入一 个新的时代——室内导航。经研究,人们80%--90%的时间都是呆在室内,70% 移动设备的使用都是在室内,80%的数据连接也在室内。近几年来,包括谷歌、微软、苹果、博通等在内的一些科技巨头,还有一些世界有名的大学都在研究 室内定位技术。室内定位技术的商业化必将带来一波创新高潮,各种基于此技 术的应用将出现在我们的面前,其影响和规模绝不会亚于GPS。 民用领域可以想象一些比较常见的应用场景,比如在机场大厅、展厅、大 型商场、超市、公共场所室内导航,能够快速找到安全出口、电梯,家长用来 跟踪小孩的位置避免小孩在超市中走丢。室内停车,找车位、停车,计时计费等。智能家居,房屋根据你的位置打开或关闭电灯。商场商户,商店根据用户 的具体位置向用户推送更多关于商品的介绍,促销活动,排队预约,支付服务等。大型建筑物应急疏散,公共安全,灾后救援。大数据分析:室内定位系统 可以进行更高精度、更大量级的大数据分析,室内定位数据可以捕捉用户在某 个货架或者店铺的光顾频率、停留时间,从而得出用户的类型、兴趣和偏好等 特质以及店铺热度、品牌关联度等重要结论,为商业分析提供有力的工具。例如,万达广场借此发现许多在必胜客消费的客户都会去ZARA消费,他们据此针对性的做了两者间的联合促销,得到了良好的收效。如果相关技术产业化后, 应用场景会十分广泛。 工业领域应用场景,如矿井,工厂厂房内精确地定位工人、设备(叉车) 上位置,实时时地将人、车、物的位置信息准确地将反映到工厂控制中心,方
V3D三维成像测量技术引领车轮定位技术的发展方向
V3D三维成像测量技术引领车轮定位技术的发展方向 随着汽车技术不断发展,对于现代汽车,四轮定位关乎汽车的行驶安全性、驾驶的可操控性和舒适性、燃油的经济性,以及悬架系统部件和轮胎的使用寿命。广大汽车用户也不断认知汽车四轮定位的重要性。作为检测工具,四轮定位仪的技术水平直接关乎四轮定位的精确性、实用性、工作效率和使用寿命。 目前,全球最先进的四轮定位测量技术非V3D三维成像测量技术莫属。那么什么是“V3D”技术?它先进在哪里?为用户能带来哪些好处?这是业内人士和广大用户特别关心的问题。现在,让我们一起来揭开这个谜底。 1.V3D技术的由来 简单地讲,V3D是英文“Visualinerwith3DimensionImagingTechnology”的简写,意思是:三维成像技术可视定位仪。 1920年,美国有一位叫“JohnBean”的技术工程师,他注意到装满水的救火车由于负重使得车轮发生严重变形,轮胎严重磨损,受此现象启发,JohnBean先生想到:能否设计一个仪器,来测量和调整车轮的定位状态呢?经过艰苦探索,他发明了第一台车用四轮定位系统,并在以后的几十年中不断致力于四轮定位系统的研发和销售,这其中包括世界上第一台光学原理定位仪,第一台采用图形显示的定位仪,以及第一台应用计算机技术的定位仪。期间,“JohnBean”注册成为汽车维修设备的品牌。 早在1985年,“JohnBean”品牌为美国FMC公司所有,同年“JohnBean”品牌的研发人员在世界上率先提出了三维成像技
术的设计理念。但由于当时计算机性能的限制,没有形成产品。随着计算机计算能力的不断提高,终于在1995年形成了具有V3D技术的产品。因其技术的先进,1996年美国SNAPON(中文名:实耐宝)公司从FMC公司收购了“JohnBean”品牌。本世纪初最新研发的ULTRAVisualiner3D系列三维成像四轮定位系统,标志着四轮定位系统在技术上一次大的革新,极大地方便了用户的操作,并且更加精确。 2.V3D定位仪的技术原理 V3D的技术原理是革命性的,完全有别于传统定位仪。在此我们以美国“JohnBean”牌V3D定位仪为例,具体说明如下: 计算机主机+信息主板+高性能数字照相机+4个目标盘,构成V3D系统的基本元件,照相机的发光二极管不断发射固定频率的红外线,目标盘接收到光线后,将光线反射给照相机进行成像。照相机将所成图像与事先储存在电脑中的图像进行比较后,精确地计算出目标与相机间距离,再通过数据处理后,计算出车辆相关尺寸,得出相应四轮定位数据。 利用高技术的数码相机和专利的三维技术,计算出车辆每一个车轮的车轮平面、轮轴平面和车身平面(图1),车身平面是由每个车轮轮轴所在的中心点连接形成的。利用三个平面的几何关系确定车辆的四轮定位数据,并将这些数据与原厂数据进行比较,告知操作者需要调整的角度信息。 与传统的四轮定位技术不同,以往的四轮定位传感器必须配有电子元件,其中包括每一个车轮传感器中的电子重力传感器,因此必须不断确认车轮平面与所在举升机之间的位置关系。因此,对于传统四轮定位仪,要求整个举升机的平面要绝对的水平,操作人要特别关注整个标定的质量和精确度,而且标定的频率较高;每次进行定位操作时,安装在车轮上的传