关于智能车舵机
伺服马达原理与控制,
模拟舵机和数字舵机的区别,
以及常见问题解决
伺服马达原理与控制
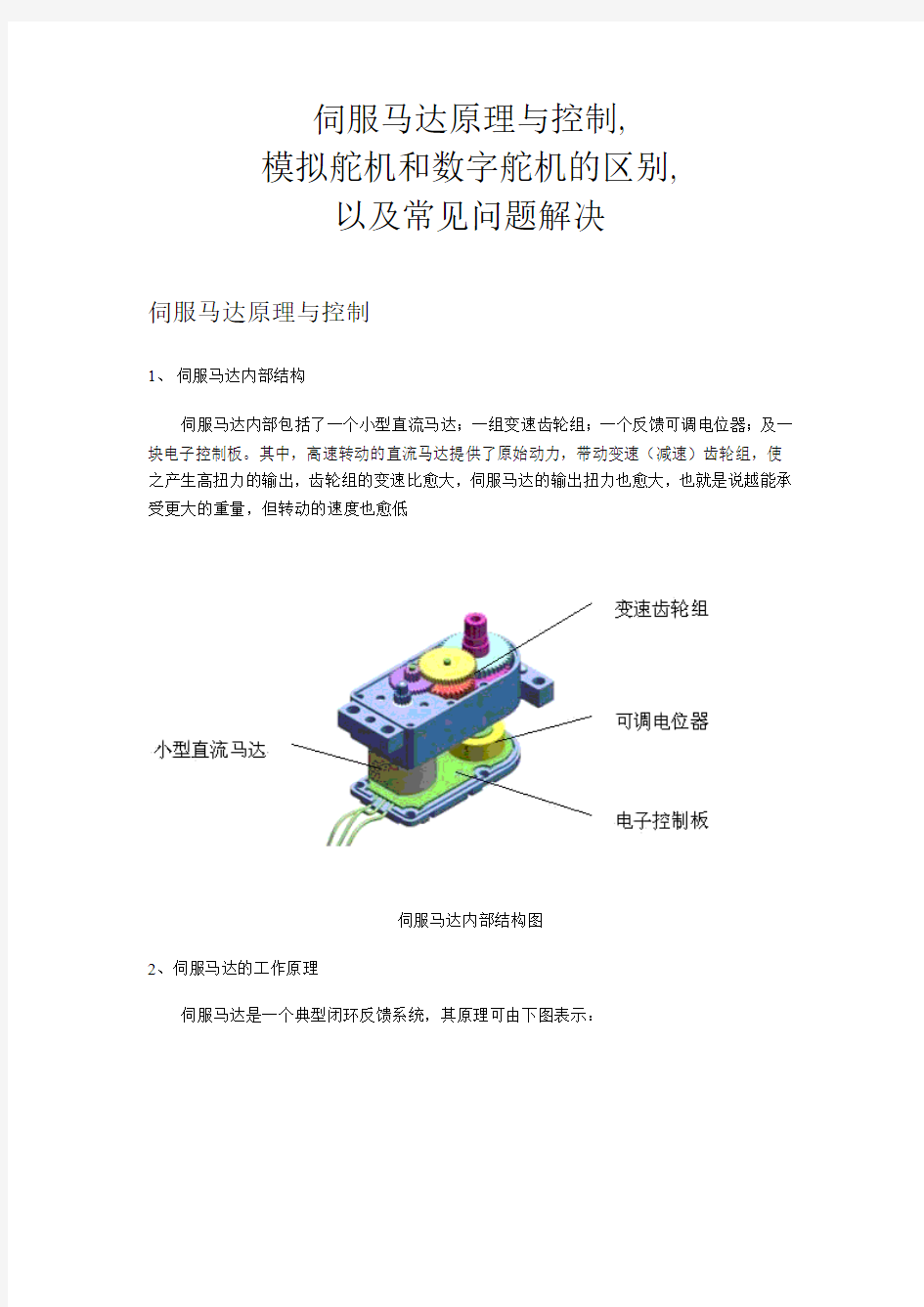
1、伺服马达内部结构
伺服马达内部包括了一个小型直流马达;一组变速齿轮组;一个反馈可调电位器;及一块电子控制板。其中,高速转动的直流马达提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也就是说越能承受更大的重量,但转动的速度也愈低
伺服马达内部结构图
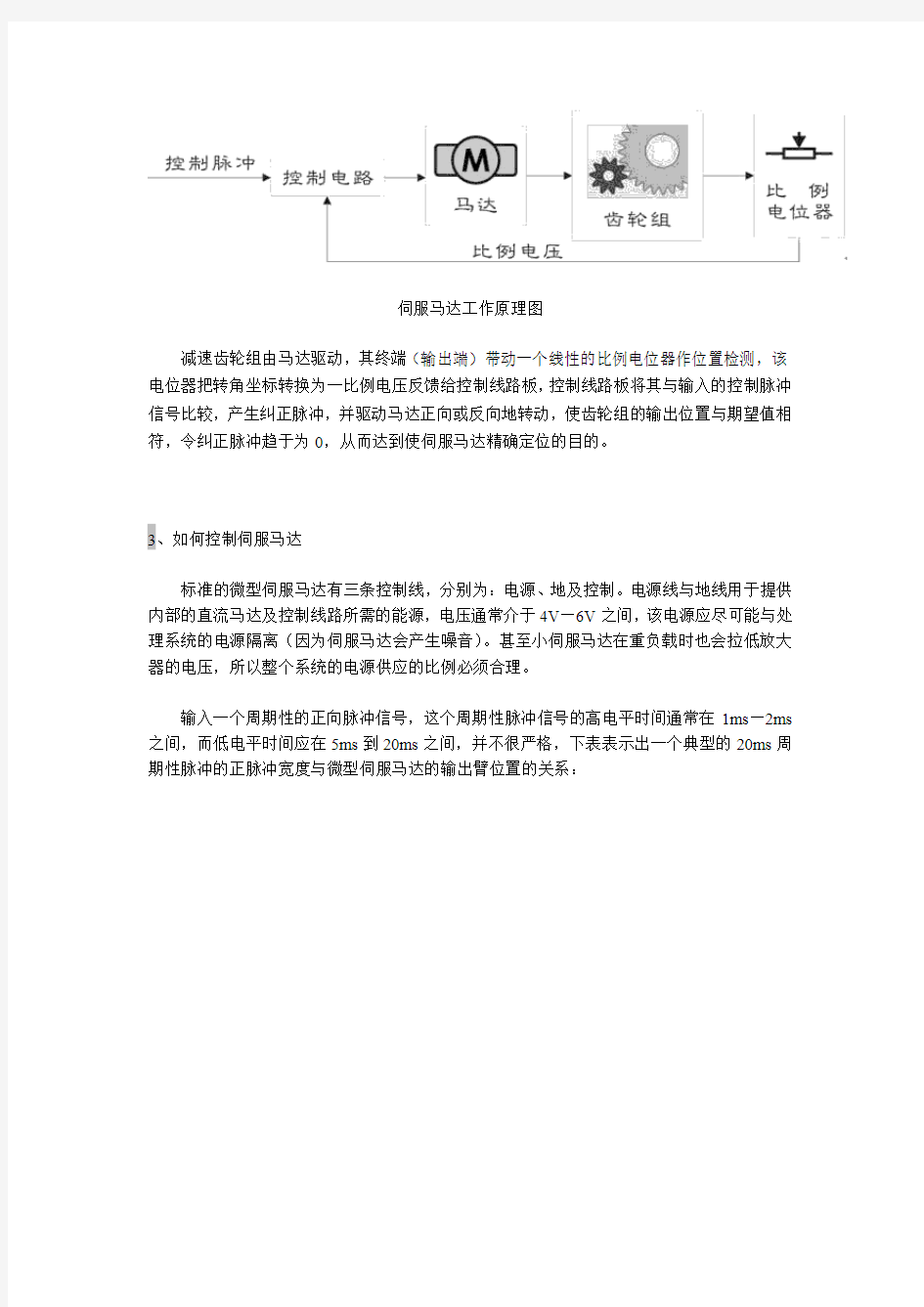
2、伺服马达的工作原理
伺服马达是一个典型闭环反馈系统,其原理可由下图表示:
伺服马达工作原理图
减速齿轮组由马达驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动马达正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服马达精确定位的目的。
3、如何控制伺服马达
标准的微型伺服马达有三条控制线,分别为:电源、地及控制。电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。
输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms—2ms 之间,而低电平时间应在5ms到20ms之间,并不很严格,下表表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂位置的关系:
4、伺服马达的电源引线
电源引线有三条,如图中所示。伺服马达三条线中白色的线是控制线,接到控制芯片上。中间的是SERVO工作电源线(红色),一般工作电源是5V。第三条是地线。
5、伺服马达的运动速度
伺服马达的瞬时运动速度是由其内部的直流马达和变速齿轮组的配合决定的,在恒定的电压驱动下,其数值唯一。但其平均运动速度可通过分段停顿的控制方式来改变,例如,我们可把动作幅度为90o的转动细分为128个停顿点,通过控制每个停顿点的时间长短来实现0o—90o变化的平均速度。对于多数伺服马达来说,速度的单位由“度数/秒”来决定。
6、使用伺服马达的注意事项
除非你使用的是数码式的伺服马达,否则以上的伺服马达输出臂位置只是一个不准确的大约数。
普通的模拟微型伺服马达不是一个精确的定位器件,即使是使用同一品牌型号的微型伺服马达产品,他们之间的差别也是非常大的,在同一脉冲驱动时,不同的伺服马达存在±10o 的偏差也是正常的。
正因上述的原因,不推荐使用小于1ms及大于2ms的脉冲作为驱动信号,实际上,伺服马达的最初设计表也只是在±45o的范围。而且,超出此范围时,脉冲宽度转动角度之间
的线性关系也会变差。
要特别注意,绝不可加载让伺服马达输出位置超过±90o的脉冲信号,否则会损坏伺服马达的输出限位机构或齿轮组等机械部件。
模拟舵机和数字舵机的区别
传统模拟舵机和数字比例舵机(或称之为标准舵机)的电子电路中为AA51883的鸿海微电子的系列模拟舵机专用芯片,一般都称之为模拟舵机。模拟舵机由功率运算放大器等接成惠斯登电桥,根据接收到模拟电压控制指令和机械连动位置传感器(电位器)反馈电压之间比较产生的差分电压,驱动有刷直流电机伺服电机正/反运转到指定位置。数字比例舵机是模拟舵机最好的类型,由直流伺服电机、直流伺服电机控制器集成电路(IC),减速齿轮组和反馈电位器组成,它由直流伺服电机控制芯片直接接收PWM(脉冲方波,一般周期为20ms,脉宽1~2 ms,脉宽1 ms为上限位置,1.5ms为中位,2ms为下限位置)形式的控制驱动信号,迅速驱动电机执行位置输出,直至直流伺服电机控制芯片检测到位置输出连动电位器送来的反馈电压与PWM控制驱动信号的平均有效电压相等,停止电机,完成位置输出。
数码舵机电子电路中带MCU微控制器故俗称为数码舵机,数码舵机凭借比之模拟舵机具有反应速度更快,无反应区范围小,定位精度高,抗干扰能力强等优势已逐渐取代模拟舵机在机器人、航模中得到广泛应用。
在过去的几年,舵机的技术发展是非常迅速的,更小的体积,更高的速度,更大的扭力,这些都是舵机发展的方向。近年出现的"数码舵机",是舵机的一大进步。下面我们介绍一下数码舵机的一些知识,数码舵机在工作方式上的优点:
数码舵机比传统的模拟舵机,即使是使用无线圈马达的模拟舵机,在工作方式上也有很多优点。但是这些优点也同时带来了一些缺点。在这里,我们尝试将为大家分析数码舵机的好的方面和不好的方面,也为大家解除一些疑问。
首先,数码舵机和模拟舵机,在微处理器以外并没有什么分别(微处理器用于分析从接收机的输入信号,并控制马达转动)。但是,我们必须认识到数码舵机和模拟舵机的差别其实是非常大的,虽然它们有着相同的马达、齿轮和外壳、同样的反馈电位器,看起来极其相似。数码舵机最大的差别是在于它处理接收机的输入信号的方式。然后控制舵机马达初始电流的方式,减少无反应区(对小量信号无反应的控制区域),增加分辨率以及产生更大的固定力量。
传统的舵机在空载的时候,没有动力被传到舵机马达。当有信号输入使舵机移动,或者舵机的摇臂受到外力的时候,舵机会作出反应,向舵机马达传动动力(电压)。这种动力实际上每秒五十周期的,被调制成开/关脉冲的最大电压,并产生小段小段的动力。当加大每一个脉冲的宽度的时候,如电子变速器的效能就会出现,直到最大的动力/电压被传送到马达,马达转动使舵机摇臂指到一个新的位置。然后,当舵机电位器告诉电子部分它已经到达指定的位置,那么动力脉冲就会减小脉冲宽度,并使马达减速。直到没有任何动力输入,马达完全停止。
以下的三个图表各显示了两个周期的开/关脉冲。图1是空载的情况;图2是脉冲宽度较窄,比较小的动力信号被输入马达;图3是更宽,持续时间更长的脉冲,更多的输入动力。您可以想象,一个短促的动力脉冲,紧接着很长的停顿,并不能给马达施加多少激励,使其转动。这意味着如果有一个比较小的控制动作,舵机就会发送很小的初始脉冲到马达,这是非常低效率的。这也是为什么模拟舵机有“无反应区”的存在。比如说,舵机对于发射机的细小动作,反应非常迟钝,或者根本就没有反应。
数码舵机截然不同的优点和特性
第一,因为微处理器的关系,数码舵机可以在将动力脉冲发送到舵机马达之前,对输入的信号,根据设定的参数进行处理。这意味着动力脉冲的宽度,就是说激励马达的动力,可以根据微处理器的程序运算而调整,以适应不同的功能要求,并优化舵机的性能。
第二,数码舵机以高得多的频率向马达发送动力脉冲。就是说,相对与传统的50脉冲/秒,现在是300脉冲/秒。虽然,以为频率高的关系,每个动力脉冲的宽度被减小了,但马达在同一时间里收到更多的激励信号,并转动得更快。这也意味着不仅仅舵机马达以更高的频率响应发射机的信号,而且“无反应区”变小;反应变得更快;加速和减速时也更迅速、更柔和;数码舵机提供更高的精度和更好的固定力量。
如果您需要您的舵机具有以下特性:
更高的精度,更少的无反应区,更准确的定位;更快的控制反应,更强的加速;在舵机的整行程中更平均的扭力;舵机在一个位置上更强的固定力量。
那么,数码舵机是唯一的解决方案!
常见问题解决
一、舵机电机调速原理及如何加快电机速度
常见舵机电机一般都为永磁直流电动机,如直流有刷空心杯电机。直流电动机有线形的转速-转矩特性和转矩-电流特性,可控性好,驱动和控制电路简单,驱动控制有电流控制模式和电压控制两种模式。舵机电机控制实行的是电压控制模式,即转速与所施加电压成正比,驱
动是由四个功率开关组成H桥电路的双极性驱动方式,运用脉冲宽度调制(PWM)技术调节供给直流电动机的电压大小和极性,实现对电动机的速度和旋转方向(正/反转)的控制。电机的速度取决于施加到在电机平均电压大小,即取决于PWM驱动波形占空比(占空比为脉宽/周期的百分比)的大小,加大占空比,电机加速,减少占空比电机减速。
所以要加快电机速度:1、加大电机工作电压;2、降低电机主回路阻值,加大电流;二者在舵机设计中要实现,均涉及在满足负载转矩要求情况下重新选择舵机电机。
二、数码舵机的反应速度为何比模拟舵机快
很多模友错误以为:“数码舵机的PWM驱动频率300Hz比模拟舵机的50Hz高6倍,则舵机电机转速快6倍,所以数码舵机的反应速度就比模拟舵机快6倍”
。这里请大家注意占空比的概念,脉宽为每周期有效电平时间,占空比为脉宽/周期的百分比,所以大小与频率无关。占空比决定施加在电机上的电压,在负载转矩不变时,就决定电机转速,与PWM的频率无关。
模拟舵机是直流伺服电机控制器芯片一般只能接收50Hz频率(周期20ms)~300Hz左右的PWM外部控制信号,太高的频率就无法正常工作了。若PWM外部控制信号为50Hz,则直流伺服电机控制器芯片获得位置信息的分辨时间就是20ms,比较PWM控制信号正比的电压与反馈电位器电压得出差值,该差值经脉宽扩展(占空比改变,改变大小正比于差值)后驱动电机动作,也就是说由于受PWM外部控制信号频率限制,最快20ms才能对舵机摇臂位置做新的调整。
数码舵机通过MCU可以接收比50Hz频率(周期20ms)快得多的PWM外部控制信号,就可在更短的时间分辨出PWM外部控制信号的位置信息,计算出PWM信号占空比正比的电压与反馈电位器电压的差值,去驱动电机动作,做舵机摇臂位置最新调整。
结论:不管是模拟还是数码舵机,在负载转矩不变时,电机转速取决于驱动信号占空比大小而与频率无关。数码舵机可接收更高频率的PWM外部控制信号,可在更短的周期时间后获得位置信息,对舵机摇臂位置做最新调整。所以说数码舵机的反应速度比模拟舵机快,而不是驱动电机转速比模拟舵机快。
三、数码舵机的无反应区范围为何比模拟舵机小
根据上述对模拟舵机的分析可知模拟舵机约20ms才能做一次新调整。而数码舵机以更高频率的PWM驱动电机。PWM频率的加快使电机的启动/停止,加/减速更柔和,更平滑,更有效的为电机提供启动所需的转矩。就象是汽车获得了更小的油门控制区间,则启动/停止,加/减速性能更好。所以数码舵机的无反应区比模拟舵机小。
四、模拟舵机加装数码舵机驱动板并未提升反应速度
根据以上分析可知,模拟舵机加装数码舵机驱动板,要提升反应速度,PMW外部控制信号(如陀螺仪送来的尾舵机信号)的频率必须加快,如果还是50Hz,那舵机反应速度当然就没提升了。
五、如何选择舵机电机
舵机电机按直流伺服电机的标准选用,根据电机种类、负载力矩、转速、工作电压等要求。舵机一般都用空心杯电动机,有用有刷的,也有用无刷无感的。
空心杯电动机属于直流永磁、伺服微特电机,与普通电机的主要区别采用是无铁芯转子,也叫空心杯型转子。具有以下优势:
1、最大的能量转换效率(衡量其节能特性的指标):其效率一般在70%以上,部分产品可达到90%以上(普通铁芯电机在15-50%);
2、激活、制动迅速,响应极快:机械时间常数小于28毫秒,部分产品可以达到10毫秒以内,在推荐运行区域内的高速运转状态下,转速调节灵敏;
3、可靠的运行稳定性:自适应能力强,自身转速波动能控制在2%以内;
4、电磁干扰少:采用高品质的电刷、换向器结构,换向火花小,可以免去附加的抗干扰装置;
5、能量密度大:与同等功率的铁芯电机相比,其重量、体积减轻1/3-1/2;转速-电压、转速-转矩、转矩-电流等对应参数都呈现标准的线性关系。
六、如何选择舵机反馈电位器
舵机反馈电位器按种类、精度,耐用性的标准选用,导电塑料电位器的精度和耐磨程度大大优于其他如线绕电位器类型。
七、舵机控制死区、滞环、定位精度、输入信号分辨率、回中性能的认识
每一个闭环控制系统由于信号的振荡等原因,输入信号和反馈信号不可能完全相等,这就涉及到控制死区和滞环的问题,系统无法辨别输入信号和反馈信号的差异范围就是控制死区范围。舵机自动控制系统由于信号震荡、机械精度等原因造成控制系统在控制死区范围外的小范围老是做调整,为使舵机在小范围内不对震荡做调整,这就需要引入滞环的作用了。滞环比控制死区大,一般控制死区范围为±0.4%,滞环可设置为±2%,输入信号和反馈信号的差值在滞环内电机不动作,输入信号和反馈信号的差值进入滞环,电机开始制动-停止。定位精度取决于舵机系统的整体精度:如控制死区、机械精度、反馈电位器精度、输入信号分辨率。输入信号分辨率指舵机系统对输入信号最小分辨范围,数码舵机输入信号分辨率大大优于模拟舵机。回中性能取决于滞环和定位精度。
八、舵机为何会老发出吱吱的响声
舵机老发出吱吱的来回定位调整响声,是由于有的舵机无滞环调节功能,控制死区范围调得小,只要输入信号和反馈信号老是波动,它们的差值超出控制死区,舵机就发出信号驱动电机。另没有滞环调节功能,如果舵机齿轮组机械精度差,齿虚位大,带动反馈电位器的旋转步,步范围就已超出控制死区范围,那舵机必将调整不停,吱吱不停。
九、为何有的舵机炸机易烧电路板
有的舵机选用的功率器件电流大同时系统中设计有或芯片自带有过流保护功能,能检测出堵转过流及短路状态迅速停止电机驱动信号。还有可在电机回路接压敏电阻防止瞬间过压及在功率器件前端设计有吸收电容。此类舵机炸机堵转不容易烧电路板和电机。与舵机是金属齿还是塑料齿并无绝对关系。
十、舵机为何抖舵
控制死区敏感,输入信号和反馈信号因各种原因波动,差值超出范围,舵臂动,所以抖舵。
北京科宇通博科技有限公司
2009-06-12
智能小车舵机控制精编版
智能小车舵机控制精编 版 MQS system office room 【MQS16H-TTMS2A-MQSS8Q8-MQSH16898】
1 //只利用一个定时器 T0,定时时间为,定义一个角度标识,数值为 1、2、3、4、5, //实现、1ms、、2ms、高电平的输出,再定义一个变量,数值最大为 40,实现周期为 20ms。 //每次进入定时中断,判断此时的角度标识,进行 //相应的操作。比如此时为 5,则进入的前 5 次中断期间,信号输出为高电平,即为的 //高电平。剩下的 35 次中断期间,信号输出为低电平,即为的低电平。这样总的时间 //是 20ms,为一个周期。 //用51板上s1和s2按键 //用P1^7输出 PWM信号控制舵机 #include "" unsigned char count; //次数标识 sbit pwm =P1^7 ; //PWM信号输出 sbit jia =P3^0; //角度增加按键检测IO口 sbit jan =P3^1; //角度减少按键检测IO口 sbit jianwei=P3^4; //按键位 unsigned char jd; //角度标识 sbit dula=P2^6; sbit wela=P2^7; unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d, 0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e void delay(unsigned char i)//延时 { unsigned char j,k; for(j=i;j>0;j--) for(k=125;k>0;k--); } void Time0_Init() //定时器初始化 { TMOD = 0x01; //定时器0工作在方式1 IE= 0x82; TH0= 0xfe; TL0= 0x33; //晶振, TR0=1; //定时器开始 } void Time0_Int() interrupt 1 //中断程序 { TH0 = 0xfe; //重新赋值 TL0 = 0x33; if(count 51单片机超高精度6路舵机控制程序 #include /**********************舵机增量式PID算法*********************** double ref = 0;//设置参数设定值 double feb = 0;//采样反馈过程值 int pwm_var = 0; //PID调整量 int PWM_out = 0; //PWM输出量 double Uo = 0; double Ek = 0; double Ei = 0; double Ed = 0; #define Kp 8 //PID调节的比例常数 #define Ti 0.05 //PID调节的积分常数 #define Td 0.02 //PID调节的微分时间常数 #define T 0.02 //采样周期 #define Kpp Kp * ( 1 + (T / Ti) + (Td / T) ) #define Ki (-Kp) * ( 1 + (2 * Td / T ) ) #define Kd Kp * Td / T //#define Kpp 4 //#define Ki 0.8 //#define Kd 20 //误差的阀值,小于这个数值的时候,不做PID调整,避免误差较小时频繁调节引起震荡 #define Emin 3 //调整值限幅,防止积分饱和 #define Umax 100 #define Umin -100 //输出值限幅 #define Pmax 15500 #define Pmin 200 /////////////////////////////////////////////////////////////////// ////// PID运算 /////// 简易教程 前言 往届全国大学生电子设计竞赛曾多次出现了集光、机、电于一体的简易智能小车题目,此次,笔者在通过多次论证、比较与实验之后,制作出了简易小车的寻迹电路系统。 整个系统基于普通玩具小车的机械结构,利用小车的底盘、前后轮电机及其自动复原装置,能够平稳跟踪路面黑色轨迹运行。系统分为检测、控制、驱动三个模块。首先利用光电对接收管和路面信号进行检测,然后经过比较器处理,对软件控制模块进行实时控制,输出相应的信号给驱动芯片驱动电机转动,从而控制整个小车的运动。 智能小车能在画有黑线的白纸“路面”上行驶,这是由于黑线和白纸对光线的反射系数不同,小车可根据接收到的反射光的强弱来判断“道路”---黑线,最终实现简单的循迹运动。 个人水平有限,有错误不足之处,还望各位前辈同学多多包含,指出修正,完善。谢谢! 李学云王维 2016年7月27号 目录 前言 (1) 第一部分硬件设计 (1) 1.1 车模选择 (1) 1.2传感器选择 (1) 1.3 控制模块选择 (2) 第二部分软件设计及调试 (3) 2.1 开发环境 (3) 2.2总体框架 (3) 2.3 舵机程序设计与调试 (3) 2.3.1 程序设计 (3) 2.3.2 调试 (3) 2.3.3 程序代码 (4) 2.4 传感器调试 (5) 2.4.1 传感器好坏的检测 (5) 2.4.2 单片机能否识别信号并输出信号 (5) 2.5 综合调试 (7) 附录1 (9) 第一篇舵机(舵机及转向控制原理) (9) 1.1概述 (9) 1.2舵机的组成 (10) 1.3舵机工作原理 (11) 1.4舵机使用中应注意的事项 (12) 1.5如何利用程序实现转向 (12) 1.6舵机测试程序 (13) 附录2 (14) 第二篇光电红外传感器 (14) 2.1传感器的原理 (14) 2.2红外光电传感器ST188 结构图 (15) 2.3传感器的选择 (15) 2.4传感器的安装 (16) 2.5使用方法 (16) 2.7红外传感器输入输出调试程序 (17) 单片机控制舵机 修改浏览权限 | 删除.什么是舵机: 舵机如下所示: 有三根线,一般依次是地,电源(5V左右),信号(信号的幅值>=3.3V),不清楚各个脚打开舵机一测量就知道了。 2.其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏 置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3.舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关 系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 重要说明: 1:上面部分还是成线形关系的,Y=90X-45(X单位是ms,Y单位是度数:) 2:上面所说的0度45度等是指度45度位置(什么意思呢:我说明一下就知道了,就拿45度位置来说,若舵机停在0度位置,下载45度位置程序后则舵机停在45度,即顺时针走了45度,若当时舵机在135度位置,则反转90度到45度位置。所以舵机不存在正转反转问题。这点非常重要。 3:若想转动到45度位置,要一直产生1.0ms的高电平(即PA0=1; Delay(1ms);PA0=0;Delay(20ms);要不停的产生这个高低电平,产生PWM脉冲 请看下形象描述吧: 下面是我在ATMEGA32上的测试程序,开发软件:ICC AVR #include #include "reg52.h" unsigned char count; //0.5ms次数标识 sbit pwm =P2^7 ; //PWM信号输出 sbit jia =P2^4; //角度增加按键检测IO口 sbit jan =P2^5; //角度减少按键检测IO口 unsigned char jd=5; //角度标识 void delay(unsigned char i)//延时 { unsigned char j,k; for(j=i;j>0;j--) for(k=125;k>0;k--); } void Time0_Init() //定时器初始化 { TMOD = 0x01; //定时器0工作在方式1 IE = 0x82; TH0 = 0xfe; TL0 = 0x33; //11.0592MZ晶振,0.5ms TR0=1; //定时器开始 } void Time0_Int() interrupt 1 //中断程序 { TH0 = 0xfe; //重新赋值 TL0 = 0x33; if(count< jd) //判断0.5ms次数是否小于角度标识 pwm=1; //确实小于,PWM输出高电平 else pwm=0; //大于则输出低电平 count=(count+1); //0.5ms次数加1 count=count%40; //次数始终保持为40 即保持周期为20ms } void keyscan() //按键扫描 { if(jia==0) //角度增加按键是否按下 { delay(10); //按下延时,消抖 if(jia==0) //确实按下 { jd++; //角度标识加1 count=0; //按键按下则20ms周期从新开始 if(jd==6) jd=5; //已经是180度,则保持 while(jia==0); //等待按键放开 飞思卡尔--智能车舵机讲解 2.2 舵机的安装 完成了玩具车的拆卸之后要做的第二步就是安装舵机,现在市场上卖的玩具车虽然也具有转向 功能,但是前轮的转向多是依靠直流电机来驱动,无论向哪个方向转都是一下打到底,无法控制转 过固定的角度,因此根据我们的设计需求,需要将原有的转向部分替换成现有的舵机,以实现固定 转角的转向。舵机的实物图如图 2.1所示。 需要说明的是由于小车系玩具车改装,在安装舵机是需要合理的利用小车的结构,将舵机安装 牢固,同时还需注意合理利用购买舵机是附赠的齿轮,从而将舵机固定在合适的位置。舵机的安装 方式有俯式、卧式多种,不同的安装方法力臂长短、响应速度都有所不同,这一点请自己根据实际 情况合理选择,图 2.2 为舵机的安装图。 5 图 2.1 舵机实物图图 2.2 舵机安装图 舵机安装过程中有一点需要尤其注意,由于舵机不是360°可转的,因此必须保证车轮左右转 的极限在舵机的转角范围之内。 舵机安装完毕之后就可以对小车的转角进行控制了,但是由于玩具车的车体设计往往限制了小 车的转角,因此可以对小车进行局部的“破坏”来增大前轮的转角,要知道在比赛中追求速度的同 时一个大的转角对小车的可控性会有一个很大的提升,如图2.3 所示,就是对增加小车转角的一个 改造,这是我在去年小车比赛中的用法。将阻碍前轮转角的一部分用烙铁直接烫掉。 但是这种做法也有风险,由于你的改造会破坏小车的整体 7 结构,有可能会对小车的硬件结构造 成破坏,因此如果你的小车在改造之后显得过于脆弱的话那你就要对你的小车采取些加固措施了。 3.4 舵机转向模块设计 舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特 点,无论是在硬件还是软件舵机设计是小车控制部分的重要组成部分,舵机的主要工作流程 为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。图 3.11 为舵机的实物图。 7 智能车的制作中,看经验来说,舵机的控制是个关键.相比驱动电机的调速,舵机的控制对于智能车的整体速度来说要重要的多. PID算法是个经典的算法,一定要将舵机的PID调好,这样来说即使不进行驱动电机的调速(匀速),也能跑出一个很好的成绩. 机械方面: 从我们的测试上来看,舵机的力矩比较大,完全足以驱动前轮的转向.因此舵机的相应速度就成了关键.怎么增加舵机的响应速度呢?更改舵机的电路?不行,组委会不允许.一个非常有效的办法是更改舵机连接件的长度.我们来看看示意图: 从上图我们能看到,当舵机转动时,左右轮子就发生偏转.很明显,连接件长度增加,就会使舵机转动更小的转角而达到同样的效果.舵机的特点是转动一定的角度需要一定的时间.不如说(只是比喻,没有数据),舵机转动10度需要2ms,那么要使轮子转动同样的角度,增长连接件后就只需要转动5度,那么时间是1ms,就能反应更快了.据经验,这个舵机的连接件还有必要修改.大约增长0.5倍~2倍. 在今年中,有人使用了两个舵机分别控制两个轮子.想法很好.但今年不允许使用了. 接下来就是软件上面的问题了. 这里的软件问题不单单是软件上的问题,因为我们要牵涉到传感器的布局问题.其实,没有人说自己的传感器布局是最好的,但是肯定有最适合你的算法的.比如说,常规的传感器布局是如下图: 这里好像说到了传感器,我们只是略微的一提.上图只是个示意图,意思就是在中心的地方传感器比较的密集,在两边的地方传感器比较的稀疏.这样做是有好处的,大家看车辆在行驶到转弯处的情况: 相信看到这里,大家应该是一目了然了,在转弯的时候,车是偏离跑道的,所以两边比较稀疏还是比较科学的,关于这个,我们将在传感器中在仔细讨论。 在说到接下来的舵机的控制问题,方法比较的多,有人是根据传感器的状态,运用查表法差出舵机应该的转角,这个做法简单,而且具有较好的滤波"效果",能够将错误的传感器状态滤掉;还有人根据计算出来的传感器的中心点(比 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片, 获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。舵机的控制信号是PWM信号,利用占 空比的变化改变舵机的位置。一般舵机的控制要求如图1所示。 图1 舵机的控制要求 单片机实现舵机转角控制可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂。对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz(周期是20ms)的信号,这对运放 器件的选择有较高要求,从电路体积和功耗考虑也不易采用。5mV 以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波 电路的精度难以达到舵机的控制精度要求。 也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。 单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。 具体的设计过程: 例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为 20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在 常用于机器人的电机有直流电机,步进电机,伺服电机。 直流电机:用于驱动机器人的移动,加上电源后,电机将一直转动,颠倒电机的电源和地线就会改变电机的转动方向。价格便宜,适用于大多数机器人应用。 点击参见:直流电机的H桥驱动原理和驱动电路选择 步进电机:也是直流电机的一种,步进电机内部有多个线圈,同时给一个或两个线圈加电,电机将转过一定的角度,要想电机连续转动,就要依次给给个线圈加电,加电的过程就是给电机施加 脉冲电流的过程。改变脉冲的频率就改变了电机的转速,改变施加脉冲的顺序就改变了电 机的转动方向。用于机器人需要位置控制的场合,如机械臂。 点击参见:步进电机的驱动原理和驱动电路 步进电机分类和选择 伺服电机:一个连续转动的直流电机,加一个闭环反馈控制的回路,以实现精确的位置控制。舵机即是伺服电机的一种,常用于飞机模型中用于转向控制。可用于驱动机器人的腿,手臂,头部和 其他肢体。 点击参见:数码舵机的原理与故障分析 点击参见:舵机的原理与单片机的控制 电机的技术参数 1、电机的电压 电压是选择直流电机的一个重要参数,小型的趣味机器人用的直流电机一般为1.5v-6v, 在这个电压范围内电机都可以工作,电压越高,转速越高。也有采用固定电压的高质量的电 机,如12V,24V直流电机。一般情况下电机都可以在高于或低于其工作电压的情况下 运行,如12V电机,可以在8v下工作,但转速降低,输出转矩变小,电机无力。如果长 时间在高于其工作电压30%-40%的电压下工作,电机线圈会发热,可能使电机永久 损坏。 2、电机的电流 空载电流:指电机不加轮胎及其他任何负载的情况下的电流。 负载电流:指加上轮胎,和其他重物下电机工作的电流。 通常空载的电流很小,负载电流是其实际工作的电流,是选择驱动电路的依据。当电机的负 载超过了电机所能承受的最大值时,电机将停止转动,电流不再增加,这就是堵转。 3、电机的转速 指的是电机的主轴每分钟转过的转数。单位为转数/分钟(r/min),机器人需要的电机转速 一般在100-200转每分钟,甚至更低的转数,而一般的直流电机的转速在4000~7000转每 分钟,无法直接在机器人上使用,必须经过降速。可以自己设计齿轮比来降速,也可以采用 现成的减速齿轮箱。 4、转矩 就是电机能够带动多大的负载,转矩越大电机越有劲。额定转矩:电机在正常工作下能够驱动负载的大小。测量方法是在电机轴上固定一个杠杆,杠杆上挂上重物,让电机带动重物旋转。 单位为g/cm,单位厘米所能带动的重物克数越大,转矩也就越大。 文章网址: https://www.360docs.net/doc/4e8221060.html,/wqb_lmkj/blog/item/41249a100292d2195aaf5394.html?timeStamp=1316176239437 #include #include #ifndef __interrupt0_H__ #define __interrupt0_H__ void interrupt0() //STM中断服务子程序 { _t2af = 0 ; switch (cnt) { case 0: PWMOUT_2 = PWMOUT_3 = PWMOUT_4 = PWMOUT_5 = PWMOUT_6 = 0; PWMOUTbuf_1 = (PWMbuf - PWMOUTbuf_1); _tm2al = PWMOUTbuf_1 & 0x00ff; _tm2ah = PWMOUTbuf_1 >>8 ; //重新定义计数初值 if( PWMOUTbuf_1 >= PWMOUTbufmin1 && PWMOUTbuf_1 <= PWMOUTbufmax1) {PWMOUTbuf_1 = PWMOUTcnt_1; PWMOUT_1 = 1;} else {PWMOUTbuf_1 = PWMbuf-PWMOUTcnt_1; PWMOUT_1 = 0 ; cnt = 1;} //判断脉宽是否在正常范围之内 break; case 1: PWMOUT_1 = PWMOUT_3 = PWMOUT_4 = PWMOUT_5 = PWMOUT_6 = 0; PWMOUTbuf_2 = (PWMbuf - PWMOUTbuf_2); _tm2al = PWMOUTbuf_2 & 0x00ff; //重新定义计数初值 _tm2ah = PWMOUTbuf_2 >> 8; if(PWMOUTbuf_2 >= PWMOUTbufmin1 && PWMOUTbuf_2 <= PWMOUTbufmax1) {PWMOUTbuf_2 = PWMOUTcnt_2; PWMOUT_2 = 1;} else {PWMOUTbuf_2 = PWMbuf-PWMOUTcnt_2;PWMOUT_2 = 0;cnt = 2;} //判断脉宽是否在正常范围之内 break; case 2: PWMOUT_1 = PWMOUT_2 = PWMOUT_4 = PWMOUT_5 = PWMOUT_6 = 0; PWMOUTbuf_3 = (PWMbuf - PWMOUTbuf_3); _tm2al = PWMOUTbuf_3 & 0x00ff; //重新定义计数初值 _tm2ah = PWMOUTbuf_3 >> 8; if(PWMOUTbuf_3 >= PWMOUTbufmin1 && PWMOUTbuf_3 <= PWMOUTbufmax1) {PWMOUTbuf_3 = PWMOUTcnt_3; PWMOUT_3 = 1;} 伺服马达原理与控制, 模拟舵机和数字舵机的区别, 以及常见问题解决 伺服马达原理与控制 1、伺服马达内部结构 伺服马达内部包括了一个小型直流马达;一组变速齿轮组;一个反馈可调电位器;及一块电子控制板。其中,高速转动的直流马达提供了原始动力,带动变速(减速)齿轮组,使之产生高扭力的输出,齿轮组的变速比愈大,伺服马达的输出扭力也愈大,也就是说越能承受更大的重量,但转动的速度也愈低 伺服马达内部结构图 2、伺服马达的工作原理 伺服马达是一个典型闭环反馈系统,其原理可由下图表示: 伺服马达工作原理图 减速齿轮组由马达驱动,其终端(输出端)带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动马达正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从而达到使伺服马达精确定位的目的。 3、如何控制伺服马达 标准的微型伺服马达有三条控制线,分别为:电源、地及控制。电源线与地线用于提供内部的直流马达及控制线路所需的能源,电压通常介于4V—6V之间,该电源应尽可能与处理系统的电源隔离(因为伺服马达会产生噪音)。甚至小伺服马达在重负载时也会拉低放大器的电压,所以整个系统的电源供应的比例必须合理。 输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms—2ms 之间,而低电平时间应在5ms到20ms之间,并不很严格,下表表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂位置的关系: 4、伺服马达的电源引线 电源引线有三条,如图中所示。伺服马达三条线中白色的线是控制线,接到控制芯片上。中间的是SERVO工作电源线(红色),一般工作电源是5V。第三条是地线。 5、伺服马达的运动速度 伺服马达的瞬时运动速度是由其内部的直流马达和变速齿轮组的配合决定的,在恒定的电压驱动下,其数值唯一。但其平均运动速度可通过分段停顿的控制方式来改变,例如,我们可把动作幅度为90o的转动细分为128个停顿点,通过控制每个停顿点的时间长短来实现0o—90o变化的平均速度。对于多数伺服马达来说,速度的单位由“度数/秒”来决定。 6、使用伺服马达的注意事项 除非你使用的是数码式的伺服马达,否则以上的伺服马达输出臂位置只是一个不准确的大约数。 普通的模拟微型伺服马达不是一个精确的定位器件,即使是使用同一品牌型号的微型伺服马达产品,他们之间的差别也是非常大的,在同一脉冲驱动时,不同的伺服马达存在±10o 的偏差也是正常的。 正因上述的原因,不推荐使用小于1ms及大于2ms的脉冲作为驱动信号,实际上,伺服马达的最初设计表也只是在±45o的范围。而且,超出此范围时,脉冲宽度转动角度之间 *********************************************************************************** * Test.c * Description: This file includes I/ O function for test, the PWM outputs function for test, function * testing sensors. * (c) Copyright 2006,Zhao Cheng * All Rights Reserved * * By : Zhao Cheng * Note : Don't change this file if possible. **********************************************************************************/ #include for(;;) { k=(~j)&0x7f; PORTA = PORTB = k; while (TCNT != 0x0000); while (TCNT == 0x0000) { if(i>9) { j=j<<1; i=0; } i++; } if(j>=0x80) j=0x01; } } void PWMtest(void) { int counter=-4500; 收稿日期:2014-06-18 作者简介:刘石红,甘肃天水人,大学学历,工程师,研究方向为电力电子技术与智能控制。 基于PID神经网络的智能车舵机控制系统研究 刘石红1 ,党超亮2 ,王能才 2 (1.兰州石化职业技术学院电子电气工程系,兰州730060;2.兰州理工大学电气工程与信息工程学院,兰州730050) 摘要:针对传统PID控制算法在电磁导航智能车舵机偏差处理中存在比例、积分、微分参数一经确定,不能在线调整,不具有自适应能力的缺点,提出了将PID神经元网络(PIDNN)控制器及其算法应用到智能车的舵机控制系统中来对传统PID控制进行改进。PIDNN控制系统不依赖智能车舵机的数学模型,能够根据控制效果在线训练和学习,调整网络连接权重值,最终使系统的目标函数达到最小来实现智能车的舵机控制。仿真测试表明,PIDNN控制系统的响应快,无超调,无静差,与传统PID控制算法相比,大大提高了智能车舵机控制系统的性能。 关键词:电磁导航智能车;舵机控制;PID神经元网 中图分类号:TP249 文献标志码:A 文章编号:1000-0682(2014)06-0097-05 StudyofintelligentvehicleservocontrolsystembasedonPIDneuralnetwork LIUShihong1 ,DANGChaoliang2 ,WANGNengcai 2 (1.LanzhouPetrochemicalCollegeofVocationalTechnology,Lanzhou730060,China; 2.CollegeofElectricalEngineeringandInformationEngineering,LanzhouUniversityofTechnology,Lanzhou730050,China) Abstract:Intheintelligentvehiclesteeringdeviation,thetraditionalPIDcontrolparametersofpro-portional,integral,differentialalgorithmisconfirmed,can蚕tadjustonline,donothaveadaptiveability,putforwardthePIDneuralnetwork(PIDNN)controlleranditsalgorithmshouldbeusedintheservocontrolsystemofintelligentvehicletoimprovethetraditionalPIDcontrol.PIDNNdoesnotdependentsonthemathematicalmodelofthecontrolsystemofthesmartcarservo,accordingtothecontroleffectofon-linetrainingandlearning,adjuststhenetworkconnectionweights,andmakestheobjectivefunctionofcontrolsystemreachedtheminimumvaluetorealizetheintelligentvehicleservocontrol.Matlabsimula-tiontestsshowthatthePIDNNcontrolsystemhasmeritsoffastresponse,noovershoot,andnosteady-stateerror.comparedwiththetraditionalPIDcontrolalgorithm,greatlyimprovestheperformanceoftheintelligentvehicleservocontrolsystem Keywords:electromagneticnavigationintelligentvehicle;servocontrol;PIDneuralnetwork 0 引言 智能车辆是一个集环境感知、信息处理、速度与转向控制等功能于一体的综合系统,具有道路障碍自动识别、自动控制以及巡航控制等功能。以往电磁导航智能车的转向控制都是由一个传统的PID控制器组成的闭环控制系统进行控制,传统PID控制算法具有结构简单、鲁棒性强的优点,但其比例、积分和微分参数是预先设定和固定不变的,且随着路况环境的变化,传统PID控制算法对系统偏差的响应变差,容易产生超调与振荡等现象。为了进一步 提高智能车舵机的控制精度,己将大量PID舵机控制的改进方案运用在了智能车的转向控制上,如模糊PID控制、自校正PID控制、专家PID控制等等。以上方案都是在保持传统PID控制器结构的基础上,采用新的方法在线或离线选取和整定PID参数。这些方法一定程度上提高了PID控制器的性能,但这些方案附加的结构和算法也增加了控制系统的复杂性,使智能车舵机的动态响应时间增大。该文结合智能车转向控制系统的特点,采用PIDNN算法,使智能车转向控制达到最佳状态。 1 舵机工作原理 S3010舵机由舵盘、位置反馈电位计、减速齿轮 组、直流电动机和控制电路组成,内部位置反馈齿轮 ? 79?2014年第6期 工业仪表与自动化装置 实验十一:树莓派平台-------带舵机云台超声波避障1、实验前准备 图1-1 树莓派主控板 图1-2 SG90舵机 图1-3 超声波模块 图1-4 七彩灯模块 2、实验目的 ssh服务登录树莓派系统之后,编译运行带舵机超声波避障可执行程序后,测量前方距离当小于30cm时,七彩灯模块亮红色,接着转动舵机到0度的位置,超声波测距并记录,转动舵机到180度的位置,超声波测距并记录,舵机归位,并记录所测距离,比较左右的距离来决定向左还是向右避障。当前方,左侧,右侧的距离均小于30cm时应该掉头避障。 3、实验原理 舵机工作原理:控制信号由接收机的通道进入信号调制芯片,获得直流的偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速此轮带动电位器旋转,使得电压差为0,电机停止转动。 舵机的控制:一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分。本次实验的采用的舵机是180度伺服,控制关系如下: 0.5ms-----------------0度 1.0ms-----------------45度 1.5ms-----------------90度 2.0ms-----------------135度 2.5ms-----------------180度 4、实验步骤 4-1.看懂原理图 图4-1 树莓派主控板电路图 图4-2 舵机接线头图4-3 超声波接线头 1、概述 舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制: 1.发动机进气量,来控制发动机的拉力(或推力); 2.副翼舵面(安装在飞机机翼后缘),用来控制飞机的横滚运动; 3.水平尾舵面,用来控制飞机的俯仰角; 4.垂直尾舵面,用来控制飞机的偏航角; 遥控器有四个通道,分别对应四个舵机,而舵机又通过连杆等传动元件带动舵面的转动,从而改变飞机的运动状态。舵机因此得名:控制舵面的伺服电机。 不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。由此可见,凡是需要操作性动作时都可以用舵机来实现。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。 工作原理:控制电路板接受来自信号线的控制信号(具体信号待会再讲),控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。 舵机的基本结构是这样,但实现起来有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据需要选用不同类型。 舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。舵机的控制信号为周期是20ms的脉宽调制(PWM)信号,其中脉冲宽度从 0.5ms-2.5ms,相对应舵盘的位置为0-180度,呈线性变化。也就是说,给它提供一定的脉宽,它的输出轴就会保持在一个相对应的角度上,无论外界转矩怎样改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应的位置上。舵机内部有一个基准电路,产生周期20ms,宽度1.5ms的基准信号,有一个比较器,将外加信号与基准信号相比较,判断出方向和大小,从而产生电机的转动信号。由此可见,舵机是一种位置伺服的驱动器,转动范围不能超过180度,适用于那些需要角度不断变化并可以保持的驱动当中。比方说机器人的关节、飞机的舵面等。 常见的舵机厂家有:日本的Futaba、JR、SANWA等,国产的有北京的新幻想、吉林的振华等。现举Futaba S3003来介绍相关参数,以供大家设计时选用。之所 // 只利用一个定时器T0 ,定时时间为,定义一个角度标识,数值为1 、2、3、4、5,// 实现、1ms、、2ms、高电平的输出,再定义一个变量,数值最大为40 ,实现周期为// 每次进入定时中断,判断此时的角度标识,进行 // 相应的操作。比如此时为5 ,则进入的前5 次中断期间,信号输出为高电平,即为 // 高电平。剩下的35 次中断期间,信号输出为低电平,即为的低电平。这样总的时间// 是 20ms,为一个周期。 // 用51 板上s1 和s2 按键 // 用P1^7 输出PWM信号控制舵机 #include "" sbit dula=P2^6; sbit wela=P2^7; unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d, 0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e void delay(unsigned char i)// { unsigned char j,k; for(j=i;j>0;j--) for(k=125;k>0;k--); } void Time0_Init() // { TMOD = 0x01; // IE= 0x82; TH0= 0xfe; TL0= 0x33; // TR0=1; // } void Time0_Int() interrupt 1 // { TH0 = 0xfe; // TL0 = 0x33; if(count51单片机超高精度6路舵机控制程序
智能车舵机PD运算
51红外循迹小车报告(舵机版)最终版
智能车中的舵机入门
51单片机程序:按键控制舵机角度
飞思卡尔--智能车舵机讲解
飞思卡尔 智能车舵机控制
舵机控制程序
机器人智能小车电机选择直流电机 步进电机 舵机
51控制舵机程序大全
51单片机一个定时器控制多路舵机
关于智能车舵机
飞思卡尔智能车的数据采集(CCD摄像头)程序,舵机,电机控制程序
基于PID神经网络的智能车舵机控制系统研究
11.智能小车-带舵机云台超声波避障
舵机简介和C51例程
智能小车舵机控制