全站仪三角高程测量办法

应用全站仪进行三角高程测量的新方
在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。
一、三角高程测量的传统方法
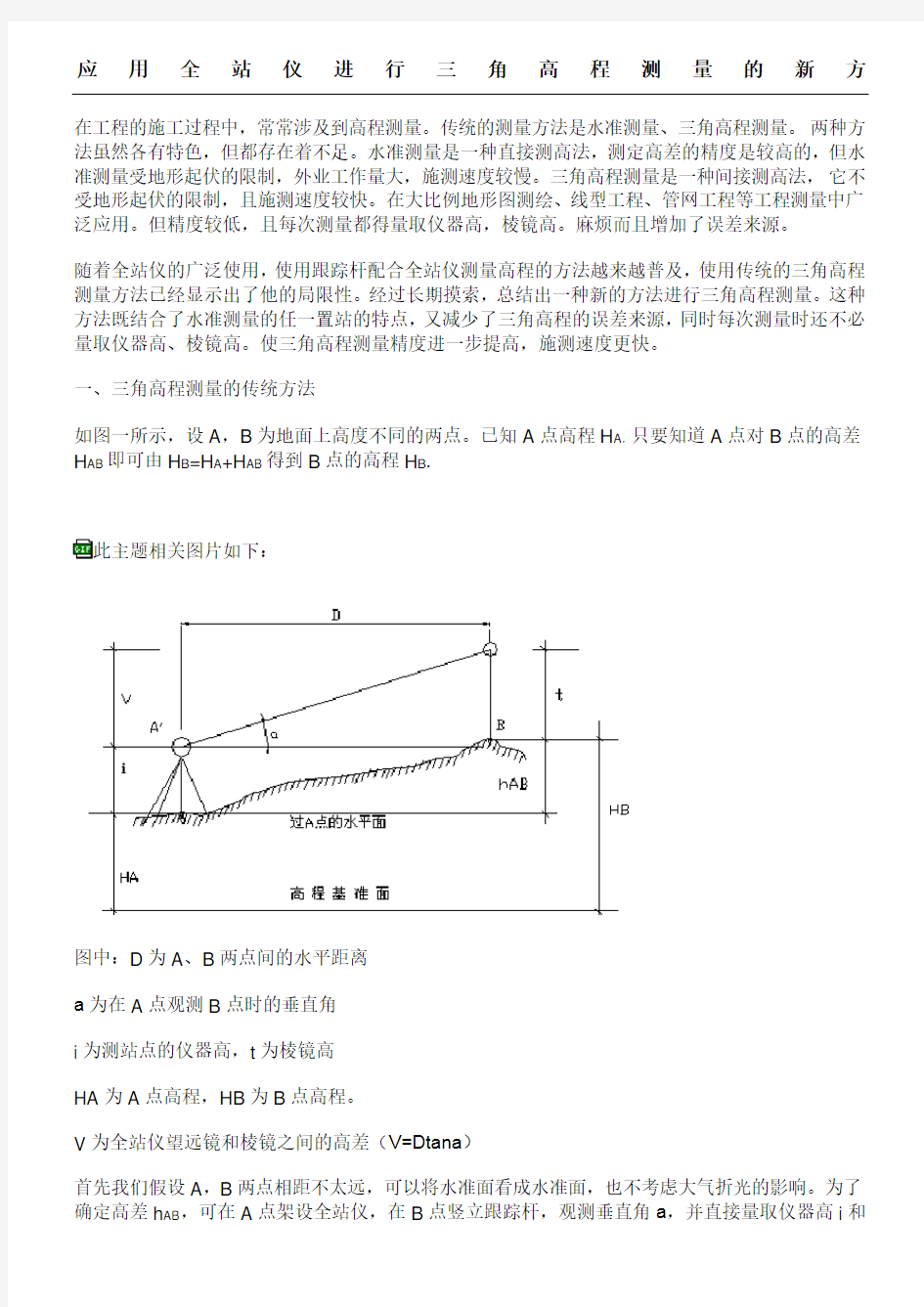
只要知道A点对B点的高差如图一所示,设A,B为地面上高度不同的两点。已知A点高程H A
,
H AB即可由H B=H A+H AB得到B点的高程H B。
此主题相关图片如下:
图中:D为A、B两点间的水平距离
а为在A点观测B点时的垂直角
i为测站点的仪器高,t为棱镜高
HA为A点高程,HB为B点高程。
V为全站仪望远镜和棱镜之间的高差(V=Dtanа)
首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差h AB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和
棱镜高t,若A,B两点间的水平距离为D,则h AB=V+i-t
故??????H B=H A+Dtanа+i-t????????(1)
这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:
1、???? 全站仪必须架设在已知高程点上
2、????????????要测出待测点的高程,必须量取仪器高和棱镜高。
二、三角高程测量的新方法
如果我们能将全站仪象水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知:
H A=H B-(Dtanа+i-t)?? (2)
上式除了Dtanа即V的值可以用仪器直接测出外,i,t都是未知的。但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t值也固定不变。从(2)可知:
H A+i-t=H B-Dtanа=W?? (3)
由(3)可知,基于上面的假设,H A+i-t在任一测站上也是固定不变的.而且可以计算出它的值W。
这一新方法的操作过程如下:
1、仪器任一置点,但所选点位要求能和已知高程点通视。
2、????用仪器照准已知高程点,测出V的值,并算出W的值。(此时与仪器高程测定有关的常数如测站点高程,仪器高,棱镜高均为任一值。施测前不必设定。)
3、????将仪器测站点高程重新设定为W,仪器高和棱镜高设为0即可。
4、????照准待测点测出其高程。
下面从理论上分析一下这种方法是否正确。
结合(1),(3)
H B′=W+D′tanа′???? (4)
H B′为待测点的高程
W为测站中设定的测站点高程
D′为测站点到待测点的水平距离
а′为测站点到待测点的观测垂直角
从(4)可知,不同待测点的高程随着测站点到其的水平距离或观测垂直角的变化而改变。
将(3)代入(4)可知:
H B′=H A+i-t+D′tanа′?????? (5)
按三角高程测量原理可知
H B′=W+D′tanа′+i′-t′???? (6)
将(3)代入(6)可知:
H B′=H A+i-t+D′tanа′+i′-t′ (7)
这里i′,t′为0,所以:
H B′=H A+i-t+D′tanа′?????? (8)
由(5),(8)可知,两种方法测出的待测点高程在理论上是一致的。也就是说我们采取这种方法进行三角高程测量是正确的。
综上所述:将全站仪任一置点,同时不量取仪器高,棱镜高。仍然可以测出待测点的高程。测出的结果从理论上分析比传统的三角高程测量精度更高,因为它减少了误差来源。整个过程不必用钢尺量取仪器高,棱镜高,也就减少了这方面造成的误差。同时需要指出的是,在实际测量中,棱镜高还可以根据实际情况改变,只要记录下相对于初值t增大或减小的数值,就可在测量的基础上计算出待测点的实际高程。
全站仪三角高程测量方法
应用全站仪进行三角高程测量的新方 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 一、三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程H A,只要知道A 点对B点的高差H AB即可由H B=H A+H AB得到B点的高程H B。 此主题相关图片如下: 图中:D为A、B两点间的水平距离 а为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高
HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtanа) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差h AB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则h AB=V+i-t 故 H B=H A+Dtanа+i-t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点: 1、全站仪必须架设在已知高程点上 2、要测出待测点的高程,必须量取仪器高和棱镜高。 二、三角高程测量的新方法 如果我们能将全站仪象水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知: H A=H B-(Dtanа+i-t) (2) 上式除了Dtanа即V的值可以用仪器直接测出外,i,t都是未知的。但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t值也固定不变。从(2)可知: H A+i-t=H B-Dtanа=W(3) 由(3)可知,基于上面的假设,H A+i-t在任一测站上也是固定不变的.而且可以计算出它的值W。 这一新方法的操作过程如下: 1、仪器任一置点,但所选点位要求能和已知高程点通视。 2、用仪器照准已知高程点,测出V的值,并算出W的值。(此时与仪器高程测定有关的常数如测站点高程,仪器高,棱镜高均为任一值。施测前不必设定。)
三角高程测量
§4-6 三角高程测量 一、三角高程测量原理及公式 在山区或地形起伏较大的地区测定地面点高程时,采用水准测量进行高程测量一般难以进行,故实际工作中常采用三角高程测量的方法施测。 传统的经纬仪三角高程测量的原理如图4-12所示,设A点高程及AB两点间的距离已知,求B点高程。方法是,先在A点架设经纬仪,量取仪器高i;在B点竖立觇标(标杆), 并量取觇标高L,用经纬仪横丝瞄准其顶端,测定竖直角δ,则AB两点间的高差计算公式为: 故(4-11) 式中为A、B两点间的水平距离。 图4-12 三角高程测量原理 当A、B两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响,所加的改正 数简称为两差改正: 设c为地球曲率改正,R为地球半径,则c的近似计算公式为: 设g为大气折光改正,则g的近似计算公式为: 因此两差改正为:,恒为正值。 采用光电三角高程测量方式,要比传统的三角高程测量精度高,因此目前生产中的三角高程测量多采用光电法。
采用光电测距仪测定两点的斜距S,则B点的高程计算公式为: (4-12) 为了消除一些外界误差对三角高程测量的影响,通常在两点间进行对向观测,即测定hAB 和hBA,最后取其平均值,由于hAB和hBA反号,因此可以抵销。 实际工作中,光电三角高程测量视距长度不应超过1km,垂直角不得超过15°。理论分析和实验结果都已证实,在地面坡度不超过8度,距离在1.5km以内,采取一定的措施,电磁波测距三角高程可以替代三、四等水准测量。当已知地面两点间的水平距离或采用光电三角高程测量方法时,垂直角的观测精度是影响三角高程测量的精度主要因素。 二、光电三角高程测量方法 光电三角高程测量需要依据规范要求进行,如《公路勘测规范》中光电三角高程测量具体要求见表4-6。 表4-6 光电三角高程测量技术要求 往返各 注:表4-6中为光电测距边长度。 对于单点的光电高程测量,为了提高观测精度和可靠性,一般在两个以上的已知高程点上设站对待测点进行观测,最后取高程的平均值作为所求点的高程。这种方法测量上称为独立交会光电高程测量。 光电三角高程测量也可采用路线测量方式,其布设形式同水准测量路线完全一样。 1.垂直角观测 垂直角观测应选择有利的观测时间进行,在日出后和日落前两小时内不宜观测。晴天观测时应给仪器打伞遮阳。垂直角观测方法有中丝法和三丝法。其中丝观测法记录和计算见表4-7。表4-7 中丝法垂直角观测表 点名泰山等级四等 天气晴观测吴明 成像清晰稳定仪器Laica 702 全站仪记录李平 仪器至标石面高1.553m 1.554 平均值1.554m 日期2006.3.1
全站仪高程测量新方法
全站仪高程测量新方法 [导读]:使用棱镜配合全站仪测量高程的方法越来越普及,传统的三角高程测量方法已经显示出了局限性。经过长期的工作实践,总结出一种新的方法进行三角高程测量。 摘要:使用棱镜配合全站仪测量高程的方法越来越普及,传统的三角高程测量方法已经显示出了局限性。经过长期的工作实践,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任意置站的特点,又减少了三角高程的误差来源,同时毎次测量时还不必量取仪器高、棱镜高。该法使三角高程测量精度进一步提高,施测进度更快。 关键词:全站仪测量三角高程新方法 1引言 在长江下游丘陵地区测量过程中,全站仪测量技术被广泛应用,全站仪三角高程测量也得到普遍应用。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是校高的,但水准测量受地起伏的限制,外业工作量大,施测速度校慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度校快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度校低,且每次测量都得量取仪器高、棱镜高,比校繁锁,而且增加了误差来源。随着全站仪的广泛使用,使用棱镜配合全站仪测量高程的方法越来越普及,传统的三角高程测量方法已径显示出了局限性。我们经过长期实践和摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任意置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。该方法使三角高程测量精度进一并提高,施测速度更快。 2三角高程测量的传统方法 设A、B为地面上高度不同的两点。已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA+HAB得到B点的高程HB。 D为A、B两点间的水平距离;α为在A点观测,B点时的垂直角;i为测站点的仪器高;t为棱镜高;HA 为A点高程,HB为B点高程V为全站仪望远镜和棱镜之间的高差(V=Dtanα); 首先我们假设A、B两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影。为了确定高差HAB,可在A点架设全站仪、在B点竖立棱镜,观测垂直角α,并直接量取仪器高i和棱镜高t,若A、B两点间的水平距离为D,则HAB=V+i-t,故 HB=HA+Dtanα+i-t(1) 这就是三角高程测量基本公式,但它是以水平面为基准和视线成直线为前提的。因此,只有当A、B两点间的距离很短时,才比较准确。当A、B两点距离较远时,就必须考虑地球弯曲和大气折光的影响。这里不叙述如何进行球差和气差的改正,只就三角高程测量新方法的一般原理进行闸述。从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:a全站仪必须架设在已知高程点上;b要测出待测点的高程,必须量取仪器高和棱镜高。 3三角高程测量的新方法 如果我们能将全站仪像水准仪一样任意置点,而不是将它置在已知高程点上同时又,在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图所示,假设B点的高程为已知,A点的高程为未知,这里要通过全站仪测定其他待测点的高程。首先由式(1)可知:HA=HB-(Dtanα+i-t)(2) 上式除了Dtanα即V的值可以用仪器直接测出外,i、t都是未知的。但有一点可以确定,即仪器一旦置好,i值也将随之不变,同时选取棱镜作为反射,假定t值也固定不变。从式(2)可知: HA+i-t=HB-Dtanα=W(3) 由式(3)可知,基于上面的假设,HA+i-t在任一测站上也是固定不变的,而且可以计算出它的值W。 这一新方法的操作过程如下: a、仪器任意置点,但所选点位要求能和已知高程点通视。 b、用仪器照准已知高程点,测出V的值,并算出W的值(此时与仪器高程测定有关的常数如测站点高程、仪器高、棱镜高均为任意什值。施测前不必设定)。 c、将仪器测站点高程重新设定为W、仪器高和棱镜高设为0即可。 d、照准待测点测出其高程。
全站仪三角高程测量方案优化设计
全站仪三角高程测量方案优化设计 论文:应用全站仪进行三角高程测量的新方法_建筑设计 关键字:全站仪三角高程测量新方法发布时间:08-29 10:54 应用全站仪进行三角高程测量的新方法 张英杰 摘要:使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 关键词:全站仪三角高程测量新方法 1引言 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。广泛应用,但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 2 三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA+ hAB得到B点的高程HB。
图一 图中: D为A、B两点间的水平距离 а为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高 HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtan а) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则hAB=V+i-t 故 HB=HA+ Dtanа+ i-t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点: 1、全站仪必须架设在已知高程点上 2、要测出待测点的高程,必须量取仪器高和棱镜高。 3 三角高程测量的新方法 如果我们能将全站仪像水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知: HA=HB-(Dtanа+i-t) (2)
如何使用全站仪进行三角高程测量
如何使用全站仪进行三角高程测量 【内容提要】使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 一、三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程H A, 只要知道A 点对B点的高差H A B 即可由H B =H A +H A B 得到B点的高程H B。
高程基准面 α A B i V HA t hAB HB 过A点的水平面 图 一 图中:D 为A 、B 两点间的水平距离 а为在A 点观测B 点时的垂直角 i 为测站点的仪器高,t 为棱镜高 H A 为A 点高程,HB 为B 点高程。 V 为全站仪望远镜和棱镜之间的高差(V=D tan а) 首先我们假设A ,B 两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差h A B ,可在A 点架设全站仪, 在B 点竖立跟踪杆,观测垂直角а,并直接量取仪器高i 和棱镜高t ,若A ,B 两点间的水平距离为D ,则h A B =V+i -t 故 H B =H A +D tan а+i -t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视 线成直线为前提的。因此,只有当A ,B 两点间的距离很短时,才比较准确。当A ,B 两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新
三角高程测量代替三四等水准测量--正文剖析
三角高程测量代替三四等水准测量 (测量高级技师论文) 中铁十二局武广客运专线第六项目部
三角高程测量代替三四等水准测量 中铁十二局集团第四工程有限公司李宝康 [摘要]:随着电磁波测距技术发展,全站仪的不断普及,三角高程测量在控制测量和施工测量中应用越来越广泛,其精度可代替三、四等水准测量,值得推广。本文就三角高程测量在导线点、水准基点复测中详细介绍了它的利与弊以及消除误差的方法。 [关键词]:三角高程三四等水准测量全站仪大气折光 现我公司承揽的杭新景高速公路龙游支线建德段高速公路SLC1合同段,地处微丘陵地段,林木茂密、地形复杂、通视条件较差,依据《公路勘测规范》并根据现场实际情况,此次水准复测采用三角高程法测定。 1、基本原理 三角高程测量是根据两点间的距离(斜距)和竖直角来推算两点间的高差。 计算公式如下:h AB=S·Sinα+ i-v + f 公式中表示:S---测得两点间的斜距; i----仪器高; v----目标高; f----球气差改正数 f=p-r = 球差-气差= D2 /2R-D2·k/2R = (1-k)·D2/2R 公式中:D= S·COSα为两点间的水平距离;
k为大气折光系数; c为球气差系数,取k=0.13,则c=6.83×10-8/m。 随着全站仪在施工测量中的普及,现在用全站仪测高差(高程)已不再用光电测距仪那样测竖直角进行公式计算,而是把仪器高及目标高输入仪器后直接测的两点间的高差。 2、估算测距三角高程的精度 对公式h AB =S·Sinα+i-v+f 求微分: 得△h AB=△S·Sinα+D·△α/ρ+△i-△v+△f 按误差传播律得:m2h=Sin2α·m2s+ D2·m2α/ρ2+m2i+m2v+m2f 。 取α=30°,两点水平距离D=500m,测距精度2mm+2ppm,测竖直角精度m=±1.5"。则按三测回取平均的边长和竖直角观测中误差。 m s=±√22+12 /√3 =±1.3mm ,mα=±1.5"/√3 =±0.86" 公式m h2 = Sin2α·㎡s+D2·m2α/ρ2+m2 i+ m2v+m2f中第一项中误差m1= Sinα·m s=±0.7mm;第二项中误差m2=D·mα/ρ=±2.0mm;第三项四项中误差m i = m v=±1mm。至于m f 的大小,一般取k=0.13,而实际k 值随地区、气候、地面覆盖物和视线超出地面高度等条件不同而变化,难以精确确定其值。实验证明,k值在一天内的变化,大致在中午前后最小,在日出日落时最大,因而竖直角的观测时间最好选在地方时10~16时之间,一般k值约在0.08~0.14之间,取m k=±0.05,则上式最后一项为m f = m k·D2/2R=±1mm, 由于这项误差按距离的平方成正比增加,若D=1km则m f =±4mm。为了减少m f的数值,故把视线控制在500m以内是很重要的。
全站仪三角高程测量及计算公式
全站仪水平测量及计算公式 因为用全站仪(附加棱镜)、经纬仪(附加塔尺)测量高程,是根据两点间的距离和竖直角,应用三角公式计算两点的高差,用全站仪测定高程的方法通常称为三角高程测量(或称测距高程)。用全站仪测量高程的特点是,精度比用水准仪测量低,但是这种方法简便、灵活,受地形的限制小。因此通常用于山区的高程测量和地形测量。三角高程测量,一般应在一定密度的水准测量控制之下。通常三角高程测量是高程控制测量的一种补充手段,其精度应同同等级的水准测量相同。 当我们采用全站仪(光电测距仪)进行高程测量放样时,如图2-2所示,由于全站仪的视线不都在一个水平面上,而全站仪所读读数由正负之分,在进行高程测量放样计算时,我们输入的数据必须以全站仪所读读数实际输入,设后视点BM的高程为H0,在同一测站下(全站仪的仪器高恒
等),放样点的实测高程的计算公式(以下为棱镜高度保持不变的放样点高程推导公式)如下: = H0-h0 + v 视线高程H 视线 -hn-v =(H0-h0 + v)+ hn-v 放样点高程Hn = H 视线 = H0-h0 + hn 当棱镜高度改变时,设棱镜改变后的高度相对与后视时的高度改变值为w(改变后的高度减去棱镜初始高度),则放样点的的实测高程为:Hn = H0-h0 + hn-w。 为避免误差因距离的传递,各等级的三角高程测量必须限制一次传递高程的距离。三角高程测量路线的总长原则上可参考同等级的水准路线的长度,路线尽可能组成闭合多边形,以便对高差闭合差进行校核。 除以上介绍的基本方法外,采用全站仪测量高程中,视线高程有两种计算方法: 一、若已知置站点地面高程,则视线高程为“置站点地面高程与全站仪仪器高之和”。 二、若已知后视点地面高程,则视线高程为“后视点地面高程减去后视高差读数加上棱镜高度”。 以上两种方法计算的视线高程是相等的。由此可知,前视目标点的高程为“仪器视线高程加上前视高差读数减去棱镜高度”。
三角高程测量方法
应用全站仪进行三角高程测量的新方法 (2010-09-06 21:36:26) 转载 分类:建筑测绘仪器的使用 标签: 杂谈 摘要:使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 关键词:全站仪三角高程测量新方法 相关站中站:工程测量 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。一、三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程HA,只要知道A点对B点的高差HAB 即可由HB=HA+HAB得到B点的高程HB。 图一 图中:D为A、B两点间的水平距离 а为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高 HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtanа) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,
全站仪三角高程测量方法
全站仪三角高程测量方 法 Document number【980KGB-6898YT-769T8CB-246UT-18GG08】
应用全站仪进行三角高程测量的新方 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 一、三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程H A, 只要知道A 点对B点的高差H AB 即可由H B =H A +H AB 得到B点的高程H B。 此主题相关图片如下: 图中:D为A、B两点间的水平距离а为在A点观测B点时的垂直角
i为测站点的仪器高,t为棱镜高 HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtanа) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气 折光的影响。为了确定高差h AB ,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为 D,则h AB =V+i-t 故??????H B =H A +Dtanа+i-t????????(1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点: 1、???? 全站仪必须架设在已知高程点上 2、????????????要测出待测点的高程,必须量取仪器高和棱镜高。 二、三角高程测量的新方法 如果我们能将全站仪象水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知: H A =H B -(Dtanа+i-t)?? (2) 上式除了Dtanа即V的值可以用仪器直接测出外,i,t都是未知的。但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t值也固定不变。从(2)可知: H A +i-t=H B -Dtanа=W?? (3) 由(3)可知,基于上面的假设,H A +i-t在任一测站上也是固定不变的.而且可以计算出它的值W。 这一新方法的操作过程如下: 1、仪器任一置点,但所选点位要求能和已知高程点通视。 2、????用仪器照准已知高程点,测出V的值,并算出W的值。(此时与仪器高
全站仪三角高程测量精度分析
辽宁工程技术大学继续教育学院毕业论文(设计) 题目:全站仪三角高程测量精度分析 层次 专业测绘工程 函授站点霍林河函授站 班级2011 级 姓名 指导教师 2012 年 10月 18 日
全站仪三角高程测量精度分析 内容摘要全站仪三角高程测量具有效率高,实施灵活等优点。全站仪三角高程测量可以代替水准测量进行高程控制,主要有对向观测法和中间观测法。在这两种方法中,前者将大气折光系数作 为常数考虑,认为各个方向的折光系数相同,这与实际的情况有出入。而中间观测法则将大气折光 系数作为变量处理,并加以改正。经研究并通过实践验证,在观测结果进行修正的条件下,全站仪 三角高程测量完全能达到三、四等水准测量的精度要求,同时可借助Excel 强大的数据处理能力,使观测数据的处理更为方便快捷[1] 。文章根据三角高程测量原理及误差传播定律,对全站仪三角高 程测量在测量中的应用及精度进行了探讨。对三角高程测量的不同方法进行了对比、分析总结。通 过试验,对全站仪水准法三角高程测量进行了精度分析。 关键词全站仪;三角高程测量;精度分析
目录 第一章全站仪 (1) 1.1全站仪的介绍 (1) 1.1.1全站仪的工作原理 (1) 1.1.2全站仪的发展和简史 (1) 1.1.3全站仪的分类 (1) 1.1.4全站仪的结构 (2) 1.1.5全站仪的主要特点 (3) 1.1.6全站仪操作注意事项 (4) 1.2 全站仪的主要功能 (5) 1.2.1水平角测量 (5) 1.2.2距离测量 (5) 1.2.3坐标测量 (5) 1.2.4全站仪的数据通讯 (5) 1.3全站仪的检验 (6) 1.3.1全站仪整平以及气泡校正 (6) 1.3.2垂直度盘安装过程中的误差分析及其校正 (6) 1.3.3检验 (7) 第二章全站仪三角高程测量的原理 (8) 2.1三角高程测量定义 (8) 2.2三角高程测量基本原理 (8) 2.3全站仪三角高程测量的技术指标 (8) 第三章全站仪三角高程测量方法 (10) 3.1三角高程测量的传统方法 (10) 3.2单向精密三角高程测量方法 (11)
全站仪中间法三角高程测量分析
全站仪中间法三角高程测量分析 【摘要】通过对全站仪中间法三角高程测量的分析,指出全站仪中间法三角高程测量在一定范围内可替代三四等水准测量,并提出提高高程测量精度的几点建议。 【关键词】三角高程;全站仪;中间法;水准测量 DAM Trigonometric Leveling Analysis WEI Dong-bo (Guilin University V ocational and Technical College,Nanning Guangxi,530001) 【Abstract】Through analysis of of trigonometric leveling the DAM pointed the Fourth Grade Leveling trigonometric leveling DAM alternative within a certain range,and proposed to increase the height measurement accuracy Suggestions. 【Key words】Triangular elevation;Total Station;Intermediate Act;Leveling 0 引言 确定地面点高程的测量工作,称为高程测量,按所使用的仪器和施测方法不同,高程测量方法主要有水准测量、三角高程测量、GPS高程测量。水准测量精度高,可用于任何等级的高程测量,但劳动强度大、进度慢。全站仪三角高程测量受地形条件的限制少,具有测距精度高、测量速度快、适用范围广等特点,采用全站仪中间法三角高程测量,既可以避免量取仪器高和棱镜高所产生的误差,减少三角高程的误差来源,又有水准测量的任意设站的特点,灵活自由设站且不用对中,极大地提高了作业效率,在一定范围内可替代三四等水准测量。 1 三角高程测量的传统方法 如图所示,设A,B为地面上高度不同的两点。已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA+HAB得到B点的高程HB。 图1 三角高程测量示意图 图中:D为A、B两点间的水平距离,а为在A点观测B点时的垂直角,i 为测站点的仪器高,t为棱镜高,HA为A点高程,HB为B点高程,V为全站仪望远镜和棱镜之间的高差(V=Dtanа) 首先我们假设A,B两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影响。为了确定高差hAB,可在A点架设全站仪,在B点竖立对中杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则hAB=V+i-t 故HB=HA+Dtanа+I-t (1) 或HB=HA+i+Ssinα-t 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球曲率和大气折光的影响(当两点距离大于300m时,须加球气差改正数,或采用对向观测后取平均高差的方法,抵消球气差的影响)。我们从传统的三角高程测量方法中可以看出,它具备以下两个特点:(1)要求全站仪架设在已知高程点或待定点上; (2)要测出待定点的高程,必须量取仪器高和棱镜高。 2 全站仪中间法高程测量原理
全站仪三角高程测量新方法探讨
全站仪三角高程测量新方法探讨 汪立军 (池州市城乡规划设计研究院安徽池州247000) 摘要:三角高程测量以其简便灵活、省时省力省资金、受地形条件限制较少的优势正在逐步代替一定范围内的水准测量工作。以下根据实践经验提出了操作更加简便、精度更高、施工测量速度更快的高程测量新方法。 关键词:全站仪三角高程测量方法建议 全站仪三角高程测量是通过测定竖直角、距离和解算三角 形来确定地面点高程的测量方法。传统的角度测量是利用光学经纬仪完成的,距离则是利用钢尺丈量确定的,不仅劳动强度大、效率低、精度差,而且在复杂地形条件下甚至无法开展工作,制约了三角高程测量的应用和发展。随着科学技术的发展,全站仪(全站型电子速测仪)的研制与生产技术已十分成熟,现阶段,各生产单位已普遍应用全站仪进行外业测设工作,特别是全站仪能快速、准确地测定两点间的斜距、垂距和平距,为实现三角高程测量奠定了基础,提供了便利。 1三角高程测量的原理方法及公式 若在A点安置全站仪,在B点安置棱镜,分别量取仪器高i和棱镜高v,测得两点间斜距D与竖直角α以计算两点间的高差,称为光电测距三角高程测量。A、B两点间的高差可按下式计算: h ab =D*sinα+i-v 若仪器安置在已知高程点上,观测该点与待测高程点之间的高差称为直觇,反之称为反觇。 2三角高程测量的传统方法 如图1所示,设A,B为地面上高度不同的两点。已知A 点高程H A,只要知道A点对B点的高差H AB,即可由H B=H A +H AB 得到B点的高程H B 。 图1三角高程测量基本原理图 图中:D为A、B两点间的水平距离,α为在A点观测B点时的垂直角,i为测站点的仪器高,v为棱镜高,H A为A点高程,H B为B点高程。设V为全站仪望远镜和棱镜之间的高差(即V=D tan a)。 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差h AB,可在A点架设全站仪,在B点竖立棱镜杆,观测垂直角α,并量取仪器高i和棱镜高v,若A,B两点间的水平距离为D,则h AB=V +i-v 故H B=H A+D tan a+i-v(1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲差和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新方法的一般原理进行阐述。 我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:a、全站仪必须架设在已知高程点上。b、要测出待测点的高程,必须量取仪器高和棱镜高。 3三角高程测量的新方法 如果我们能像安置水准仪一样将全站仪任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将会更快。如下图2 , 图2三角高程测量示意图 假设B点的高程已知,A点的高程未知,这里要通过全站仪测定其待测点的高程。首先由(1)式可知 H A =H B -D tan a-i+l.(2)上式除了D tan a(D tan a即h值)可以用仪器直接测出外,i、l都是未知的。但有一点可以确定:即仪器一旦置好,i值也将不变,同时选取跟踪杆作为反射棱镜,假定l值也固定不变。从(2)可知 H A +i-l=H B -D tan a=W(3)基于上面的假设,由(3)式可知,H A+i-l在任一测站上也是固定不变的,而且可以计算出它的值W。 这一新方法的操作过程如下:①仪器安置于任一点,但所选点位要求能和已知高程点通视;②用仪器照准已知高程点,测出D tan a值,并算出W值(此时与仪器高程测定有关的数值如测站点高程、仪器高、棱镜高均为任一值,施测前不必设定);③将仪器测站点高程重新设定为W,仪器高和棱镜高设 · 822 · 2012年第6期(总第123期)江西建材勘察与测绘