SVPWM逆变器死区效应补偿方法的研究
SVPWM逆变器死区效应补偿方法的研究
DEAD-TIME COMPENSATION FOR VECTOR-CONTROL INDUCTION MOTOR PWM
INVERTER
王高林,贵献国,于泳,徐殿国
(哈尔滨工业大学电气工程系,黑龙江省 哈尔滨市 150001) (Email: Wanggl@https://www.360docs.net/doc/5d5307211.html,, Xianggui@https://www.360docs.net/doc/5d5307211.html,, Yuyong@https://www.360docs.net/doc/5d5307211.html,, Xudiang@https://www.360docs.net/doc/5d5307211.html, )
摘要:针对伺服系统矢量控制系统,提出了一种可以补偿死区误差电压并消除零电流钳位效应的死区补偿方法。在分析了影响死区效应的因素以及等效死区时间的表达式的基础上,采用平均死区时间补偿法,在两相静止轴系中对等效死区时间产生的误差电压进行了补偿。为了提高电流极性检测的准确性,利用旋转轴系中的励磁电流和转矩电流分量经过坐标反变换,判断电流在两相静止轴系所处的扇区来决定需要施加的补偿电压。另外为了更好地消除由于死区时间而产生的零电流钳位效应,将一种消除零电流钳位效应的方法结合到上述补偿方法中。最后通过TMS320F2812 DSP芯片来实现补偿算法,并在11kW 伺服电机矢量控制系统中验证了补偿算法的有效性。
ABSTRACT: A dead-time compensation strategy is presented to compensate dead-time error-voltage and eliminate zero-current clamping effect for servo motor vector control system. The factor influencing dead-time effect is analyzed, and expression of equivalent dead time is deduced. Average dead-time compensation technique is adopted to compensate error-voltage at two-phase stationary frame. To improve accuracy of detection of current direction, components of magnetizing current and torque current are transformed into two-phase stationary frame. Therefore compensating voltage vector can be decided according to the sector the current vector is locating. In addition, a kind of zero-current clamping effect eliminating scheme is adopted combining with the above compensation method to improve the compensation performance. The proposed compensation method is performed with TMS320F2812 DSP chip. Experimental results demonstrate the efficiency of the dead-time compensation method in 11kW servo motor vector control system.
关键词:伺服系统,空间矢量PWM,死区效应,零电流钳位,补偿
KEY WORDS:servo system; space vector PWM; dead-time effect; zero-current clamping; compensation
1 引言
由于伺服系统在各种工业场合应用非常普遍,永磁伺服电机相关控制技术研究也获得了广泛重视,其中空间矢量脉宽调制技术(SVPWM)一直是一个热门的研究课题[1,2]。在SVPWM逆变器中,为了防止同一桥臂的两只开关管产生直通,需要在两只开关管的开通与关断时刻之间加入一定的死区时间,所产生的死区效应会造成逆变器输出电压基波分量减小、输出电流波形畸变及输出转矩脉动[3]。在感应电机矢量控制场合,往往需要知道电压的状态量,由于输出电压是由离散的脉冲组合而成难以测量,通常直接将参考电压当作输出电压。但与参考电压相比,实际的输出电压由于受死区时间影响而与参考电压有所差别。因此为了能够进一步提高感应电机的控制性能,有必要对死区效应进行有效地补偿。
已经有众多学者对死区效应进行了研究,并提出了许多补偿方法[3-10]。这些方法基本上可以分为两种,一种是基于平均误差电压补偿法,这种方法具有易于实现的优点,缺点是补偿不够精确,后来又有学者对开关器件管压降引起的附加死区时间,以及电路中寄生参数对死区效应的影响进行了研究[11,12]。另一类方法是基于脉冲的补偿方法,这种方法可以对死区时间进行较精确地补偿,但对控制芯片的要求也更高,要求在一个PWM载波周期内进行两次采样[12]。死区补偿中电流极性的检测很重要,如果对电流过零点判断不够准确反而会引起误补偿。尽管很多补偿方法能够取得不错的补偿效果,但在低速轻载的场合,经常会发生零电流钳位的现象,使输出电流产生畸变[12]。本文研究了一种采用平均误差电压补偿法并结合消除零电流钳位效应的方法对感应电机PWM逆变器的死区效应进行了补偿,最后在11kW伺服
电机系统中对这种补偿方法进行了验证。
2 PWM 逆变器死区效应分析
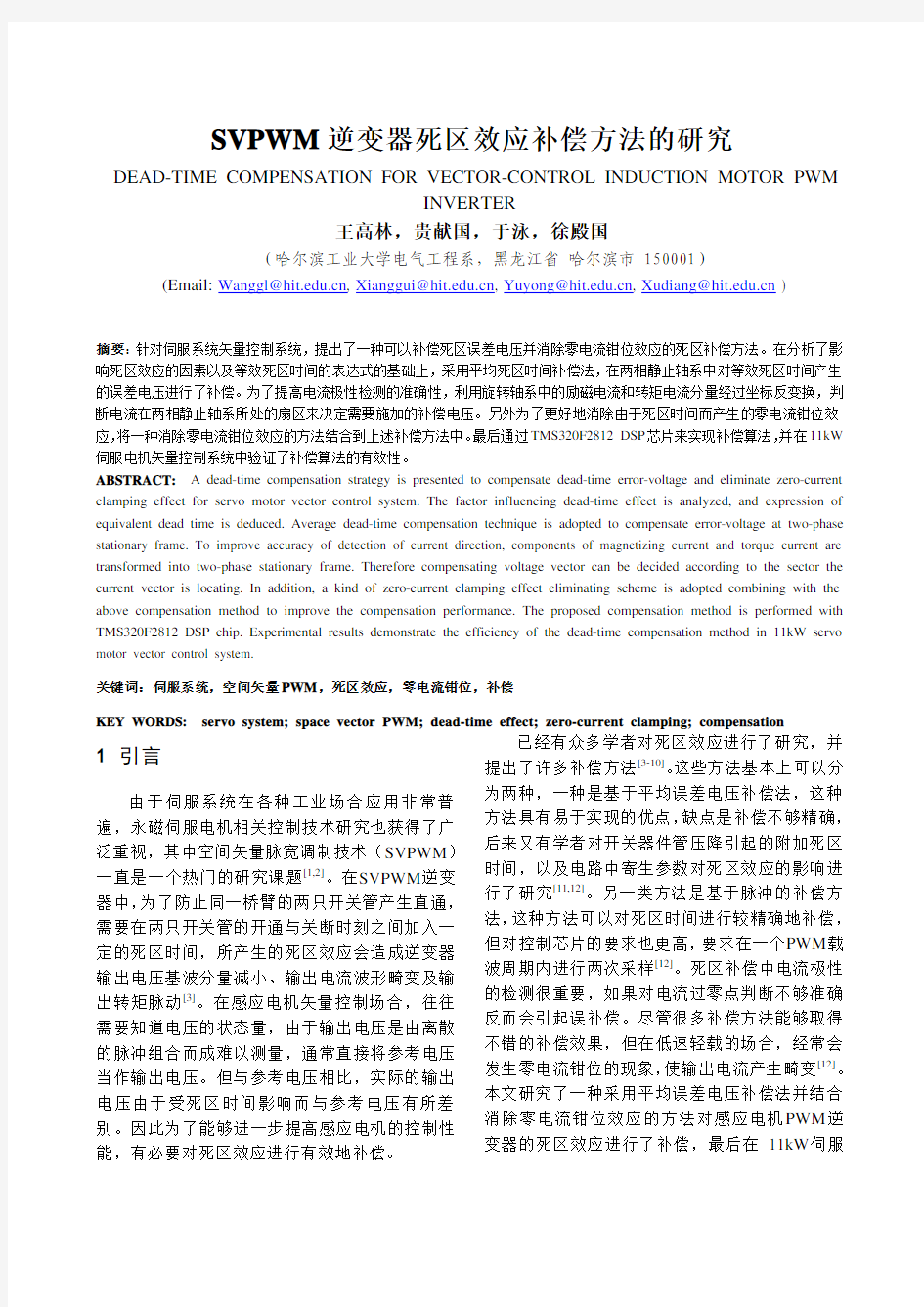
图1为伺服系统PWM 逆变器的原理图。由于死区时间的存在,使得在死区时间内输出电压的大小不受开关管控制,由输出电流的流向来决定,另外IGBT 的开通和关断都需要一定的时间,再考虑到IGBT 和反并联二极管的通态管压降,这些因素共同作用使得输出电压产生了一定的误差。
图1 三相PWM 逆变器原理图 Fig.1 Three-phase PWM inverter
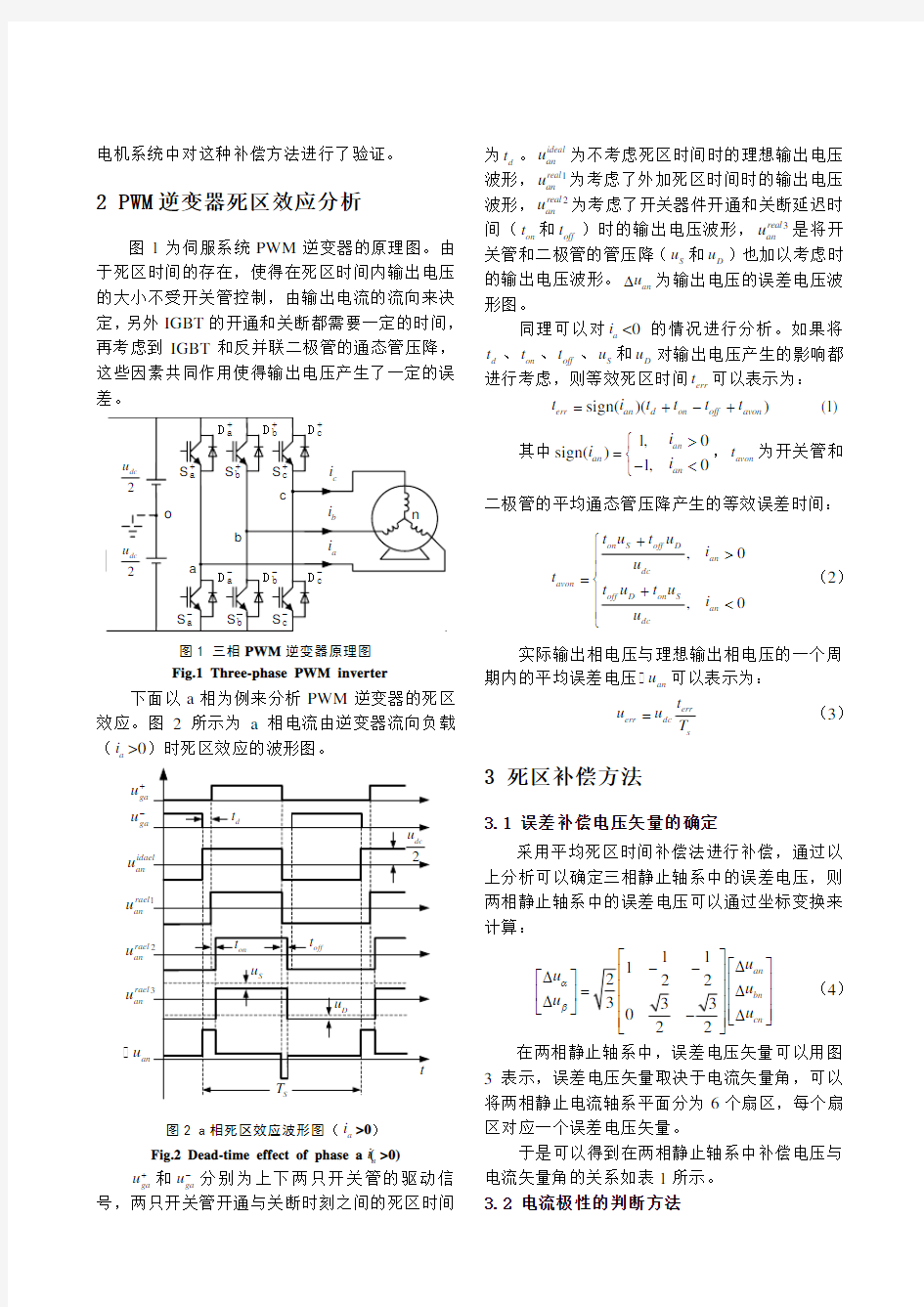
下面以a 相为例来分析PWM 逆变器的死区
效应。图2所示为a 相电流由逆变器流向负载(>0)时死区效应的波形图。
a
i ga
u +ga
u ?an u rael an
u rael an u rael an
u an
u 图2 a 相死区效应波形图(>0) a i Fig.2 Dead-time effect of phase a (>0)
a i ga
u +和ga u ?
分别为上下两只开关管的驱动信号,两只开关管开通与关断时刻之间的死区时间
为。为不考虑死区时间时的理想输出电压
波形,为考虑了外加死区时间时的输出电压
波形,为考虑了开关器件开通和关断延迟时
间(和)时的输出电压波形,是将开关管和二极管的管压降(和d t ideal
an u 1
real an u 2
real an u on t off t 3
real an u S u D u )也加以考虑时的输出电压波形。an u Δ为输出电压的误差电压波形图。
同理可以对<0的情况进行分析。如果将、、、和a i d t on t off t S u D u 对输出电压产生的影响都进行考虑,则等效死区时间可以表示为:
err t sign()()err an d on off avon t i t t t t =+?+ (1) 其中1,0
sign()1,0an an an i i i >?=
??<
?
,
为开关管和
二极管的平均通态管压降产生的等效误差时间:
avon t ,0,0
on S off D
an dc
avon
off D on S an dc t u t u i u t t u t u i u +?>?
?=?
+?
(2) 实际输出相电压与理想输出相电压的一个周期内的平均误差电压an u 可以表示为:
err
err dc
s
t u u T = (3) 3 死区补偿方法
3.1 误差补偿电压矢量的确定
采用平均死区时间补偿法进行补偿,通过以上分析可以确定三相静止轴系中的误差电压,则两相静止轴系中的误差电压可以通过坐标变换来计算:
1112
202
2an bn cn u u u u u αβ?
Δ???
?
?Δ???
=Δ??
?Δ????Δ??????? (4) 在两相静止轴系中,误差电压矢量可以用图
3表示,误差电压矢量取决于电流矢量角,可以将两相静止电流轴系平面分为6个扇区,每个扇区对应一个误差电压矢量。
于是可以得到在两相静止轴系中补偿电压与电流矢量角的关系如表1所示。 3.2 电流极性的判断方法
补偿电压取决于三相电流的极性,如果通过直接检测三相电流来判断电流极性,在零点附近会有较大误差,容易引起误补偿。由于和为直流量,
d i q i
图3 两相静止轴系中的误差电压矢量 Fig.3 Error-voltage vector in two-phase stationary
scheme
表1 电流矢量与补偿电压的关系
Tab.1 Relation of current vector to compensation voltage
Sector a i
b i
c i 1dcom u 1qcom u Ⅰ + - -
43err u 0
Ⅱ + + - 23err u err Ⅲ - + -
23err u ? err
Ⅳ - + +
43err u ? 0
Ⅴ - - + 23err u ? err Ⅵ
+ - +
23
err u err
可通过一个简单的一阶低通滤波器来滤除高次谐波成分,再由滤波后的和来判断电流的极性。
df i qf i 同步旋转轴系的电流和经过坐标反变换可以得到两相静止坐标系下电流矢量的幅值和相位角:
df i qf i cos cos sin sin sin cos df i s qf i i i t t I i i t t αβθωωθωω???????
??==????????
???????? (5) 根据所计算得到的电流矢量角i θ,可以在两
相静止坐标系中判断电流矢量所处的扇区,这样就可以根据表1来确定所需的补偿电压矢量。 3.3 零电流钳位效应消除策略
为了提高死区补偿效果,有必要对电流过零点的钳位现象进行分析,采取有效措施将其消除。图4为a 相电流由正向往负向过渡时,由于死区时间引起电流与电压波形的偏差。在死区时间内,当减小到零时,由于同一桥臂的两只开关管都处于关断的状态,使得失去开关管的控制而出现了偏差(此时等于a 相反电动势),这将阻碍朝反方向变化而钳位在零点。当电机低转速运行时,输出电压较低,这种现象可能持续几个采样周期,从而产生了明显的零电流钳位效应。
a i an u an u a e a i ga u +
ga
u ?an
u a
i a
图4 零电流钳位现象原理图
Fig.4 Zero-current clamping phenomenon
当过零点时,图1中的b 和c 点电位由所在桥臂开关管的状态决定:
a i 1
(2bo dc b u u S =? (6)
1
(2
co dc c u u S )=? (7)
结合永磁电机三相绕组对称的原理,可以得
到:
31
(22ao a bo co u e u u =++) (8)
1
(2
bn bo co a u u u e =??) (9)
1
(2
cn co bo a u u u e =
??) (10)
可以看出由于零电流钳位效应使得三相输出电压都产生了误差,误差电压可以通过坐标变换
在两相静止坐标系。三个相电流过零时需要补偿的等效误差电压可以用表2来表示。
将表2的零电流钳位效应补偿电压与表1的死区时间误差电压补偿相结合,最后的补偿电压由和组成,可以补偿输出电压的误差,同时也可以改善低速轻载场合的输出电流波形。
dcom u 1dcom u 2dcom u 表2 零电流钳位补偿电压
Tab.2 Compensation voltage for zero-current clamping
Phase 2dcom u
2qcom u a *an a u e ?
b *1()2
bn b u e ??
*
()2bn b u e ?
?c
*1()2
bn b u e ??
*
)cn c u e ?4 实验结果分析
图5为采用上述的死区补偿方法的永磁电机矢量控制系统框图,通过11kW 永磁电机矢量控制平台进行了验证,采用TI 公司的TMS320F2812 DSP 芯片来实现矢量控制算法和死区补偿算法。
图5. 进行死区补偿的感应电机矢量控制框图 Fig.5 Vector control induction motor drive with proposed
dead-time compensator
伺服电动机的额定参数为:n P =11kW ,=380V ,=23A , =2000rpm 。DSP 系统时钟设为150MHz ,PWM 调制频率为8kHz ,死区时间设定为 3.2us ,功率模块采用EUPEC 的FP75R12KE3,电流信号检测采用霍尔传感器L18P50D15。
n U n I n n 图6为电机工作在1Hz 时的空载电流实验波形,纵坐标刻度为10mV/A 其中图6(a)为未采用
死区补偿的输出电流波形及FFT 分析波形,可以看出电流波形有明显的畸变,含有较多的5次和7次谐波,并且在电流过零点处出现了零电流钳位的现象,谐波电流含量约为7.58%。其中图6(b)为采用死区补偿后的输出电流波形及FFT 分析波形,电流波形的正弦度得到明显的改善,也有效地消除了零电流钳位现象,此时输出电流谐波含量约为1.91%。
(a) 补偿之前波形 (b)补偿之后波形 图6 1Hz 时的空载电流波形及FFT 波形 Fig.6 Measured current waves with no load at 1Hz
(a) 补偿之前波形 (b)补偿之后波形
图7 5Hz 时的空载电流波形
Fig.7 Measured current waves with no load at 5Hz
(a) 补偿之前波形 (b)补偿之后波形
图8 10Hz 时的空载电流波形
Fig.8 Measured current waves with no load at 10Hz
图7和图8分别为电机工作在5H 和10Hz 时死
区补偿前后的空载电流波形,可以看出采用死区补偿后,输出电流波形得到了明显改善。
5结论
介绍了一种应用于永磁伺服系统矢量控制的电压型PWM逆变器的死区效应补偿方法。采用平均电压补偿法在两相静止轴系中对死区误差电压进行了补偿,通过将两相旋转轴系电流分量经过一阶低通滤波器滤波后,坐标反变换到两相静止轴系来判断电流极性。并结合了一种能消除零电流钳位现象的补偿法有效地消除电流过零点的钳位问题。最后通过11kW伺服系统矢量控制系统验证了所提出的死区效应补偿方法,获得了比较好的补偿效果。
参考文献
[1] Frede Blaabjerg, John K. Pedersen, and Paul
Thoegersen. Improved modulation techniques for
PWM-VSI drives[J]. IEEE Trans on Industrial
Electronics, 1997, 44(1):87-95.
[2] 杨贵杰, 孙立. 空间矢量脉宽调制方法的研究[J].
中国电机工程学报, 2001, 21(10):79-83.
[3] Takashi Sukegawa, Kenzo Kamiyama, Katsuhiro
Mizuno, Takayuki Matsui and Toshiaki Okuyama.
Fully digital, vector-controlled PWM VSI-Fed ac
drives with an inverter dead-time compensation
strategy[J]. IEEE Trans on Industrial Electronics,
1991, 27(3):552-559.
[4] 毛鸿, 吴兆麟. 基于三相PWM整流器的无死区空
间矢量调制策略[J]. 中国电机工程学报, 2001,
21(11):100-104.
[5] Y. H. Liu, and C.L. Chen. Novel dead time
compensation method for induction motor drives
using space vector modulation[J]. IEE Proc.-Electr.
Power Appl, 1998, 145(4):387-392.
[6] 王家军, 许镇琳, 王豪,孟明. 基于逆变器死区特性
的永磁同步电动机系统μ-修整变结构控制[J]. 中
国电机工程学报, 2003, 23(4):148-152.
[7] Jin Shun, Zhong Yan-ru. A novel three-level
SVPWM algorithm considering neutral-point control
and narrow-pulse elimination and dead-time
compensation[J]. Proceedings of the CSEE, 2005,
25(6):60-66.
[8] 孙向东,钟彦儒. 一种新颖的死区补偿时间测量方
法[J]. 中国电机工程学报, 2003, 23(2):103-107
[9] Alfredo R, Munoz, and Thomas A. Lipo. On-line
dead-time compensation technique for open-loop
PWM-VSI drives[J]. IEEE Trans on Power
Electronics, 1999, 14(4):683-689.
[10]Wu Mao-gang, Zhao Rong-xiang, Tang Xin-zhou.
Dead-time effects analysis and compensation of
SPWM and SVPWM inverter[J]. Proceedings of the
CSEE, 2006, 26(12):101-105.
[11] Jong-Woo Choi, and Seung-Ki Sul. Inverter output
voltage synthesis using novel dead time
compensation[J]. IEEE Trans on Power Electronics,
1996, 11(2):221-227.
[12] N. Urasaki, T. Senjyu, T. Kinjo, T. Funabashi and H.
Sekine. Dead-time compensation strategy for
permanent magnet synchronous motor drive taking
zero-current clamp and parasitic capacitance effects
into account[J]. IEE Proc.-Electr. Power Appl, 2005,
152(4):845-853.
作者简介:
王高林(1978-),男,博士研究生,研究方向交流电机
控制技术,交流伺服系统。
贵献国(1979-),男,博士,研究方向永磁电机设计及
控制技术。
于泳(1974-),男,副教授,硕士生导师,研究方向电
力电子与电力传动技术。
徐殿国(1960-),男,教授,博士生导师,研究方向为
电力电子技术,照明电子技术,电机及控制技术,智能控制
技术。
Microchip交错反激逆变器软件分析
Microchip基于dsPIC的交错反激逆变器软件设计分析 前言 微芯公司提供的微型太阳能光伏逆变器解决方案转换效率在0.8~0.95之间,最大功率点追踪更是达到了99.5%,其110V的设计方案中:最大输出功率 = 185W,标称输出电压 = 110V,标称输出电流 = 1.7A,输出电压范围 = 90 VAC-140 VAC,标称输出频率 = 60 Hz,输出频率范围 = 57 Hz-63 Hz,功率因数 = >0.95,总谐波失真 = <2%。220V上网设计方案中:最大输出功率 = 185W,标称输出电压 = 230V,标称输出电流 = 0.8A,输出电压范围 = 180 VAC-264 VAC,标称输出频率 = 50 Hz,输出频率范围 = 47 Hz-53 Hz,功率因数 = >0.95,总谐波失真 = <5%。在PV电压方面,采用25VDC 至45VDC 的输入电压范围,最大开路电压为55Vdc。本文在软件测试的前提下主要就其逆变器设计软件部分进行一定的分析和总结。更详细的应用笔记以及算法设计技巧可参考微芯公司官网网站。 文档整理:胡耀琪
目录 第一章开发编译环境 1.1 MAPLAB IDE简介 1.2 MAPLAB IDE的安装与环境变量设置 1.3 MAPLAB C30编译器的安装与设置 1.4 PICKIT3调试器的简介和设置 1.5 编译调试过程简介 第二章 dsPIC33FJ16GS504简介 2.1 振荡器及I/O口的配置 2.2 定时器及中断控制简介及其配置 2.3 高速PWM简介及其配置 2.4 高速10 位模数转换器(ADC)的简介及其配置2.5 系统配置位的说明 第三章交错反激逆变器软件设计 3.1 交错反激逆变器设计概论 3.2 系统控制状态机简介 3.3 数字锁相环(PLL) 3.4 MPPT控制环 3.5 电流控制环 3.6 负载平衡控制环 第四章结论 4.1 主要完成的内容 4.2 进一步可开展的内容 附录
死区补偿总结
死区补偿技术 清华大学电机系 缪学进 1 引言 微处理和电力电子技术的迅速发展,极大地促进了PWM技术的发展和应用,各种PWM 交流传动技术在工农业生产、国防和日常生活中得到了广泛的应用。我们知道,任何固态的电子开关器件都具有一定的固有开通和关断时间。对于确定的开关器件,固有开通和关断时间内输出信号是不可控制的。三相桥式逆变器系统中,同一桥臂上的两个开关器件工作于互补状态。由于一般开关器件的开通时间小于关断时间,因此,如果将互补的控制信号加到同一桥臂上两个开关器件的控制极上,那么这两个开关器件将会发生“直通”,其后果非常严重。所以目前的逆变器系统广泛采用时间延迟的控制技术即将理想的PWM控制信号上升沿或下降沿延迟一段时间,在这段时间内输出信号是不可控的,这就是死区时间[1]。死区的存在使逆变器不能完全精确复现控制信号的波形,输出电压产生幅值和相位的误差。由于死区的作用,每一个调制周期内引起的微小畸变经积累后,必然会使逆变器的输出电流波形产生畸变,它不但会降低基波幅值,而且会产生低次谐波,直接影响电动机在低速下的运行性能。过去为了消除死区的影响,通常采用硬件和软件相结合的解决方案,但硬件补偿方法存在着检测精度差、滞后以及实现困难等问题。微处理器在电机控制中的应用使死区补偿变得容易,尤其是TI公司的专为电机控制设计的2000系列处理器(如TMS320F240、TMS320LF2407、TMS320F2812等)在芯片内部集成了专门的硬件电路进行死区补偿,减少了电压误差,可以获得满意的效果。 2 死区效应分析 三相电压型逆变器的基本构成如图 1 所示,与电流型逆变器相比,电压型逆变器可以提高逆变器的开关频率,有利于快速控制和抑制逆变器噪声,并且输出阻抗小,适合于交流电机调速控制。 为了防止逆变器区桥臂的上下功率开关发生直通,在上下功率开关改变状态时必须插入死区时间,即先将已开通的功率管关断,插入一定的死区延时,再开通另一个处于关断状态的功率管。
SVPWM中全新的死区时间效应补偿方法
SVPWM中全新的死区时间效应补偿方法 杨来坡王泰宇徐鸿李千里 安徽中家智锐科技有限公司 摘要:文章对3相逆变的死区时间效应进行了分析,同时给出了一种全新的针对永磁同步电机驱动中死区效应的补偿方法。该方法同时考虑了零电流钳位和寄生电容的影响,经过计算和实际验证,确实改善了死区效应的影响。本方法理论分析的有效性及其实际效果都通过在空调直流电机驱动控制应用中得到了充分验证。 关键词:三电平逆变器;死区时间;补偿;PWM Dead-time compensation in the application of SVPWM Laipo YangTaiyu WangHong XuQianli Li Anhui Cheari Zhi Rui Technology Limited Company Abstract: The Dead-time effect of the three phases bridge inverter is analyzed in this paper. A Dead-time compensation strategy is presented for a permanent-magnet synchronous motor drive taking zero-current damp and parasitic capacitance effects into account. It improves the Dead-time effect, with practicality and little calculation .The validity of theory analysis and this method is proved by the experiment results, the method is applied to the controlling of Air conditioner motor. Keywords: Three-level inverter;Dead time;Compensation;PWM
液压泵马达死区补偿
(4)死区补偿控制 滑阀式比例阀在阀芯运动起点(节流阀)或中位附近(方向阀)带有一定的遮盖量(即死区)。该死区减小零位阀芯泄漏,并在例如电源失效或急停工况提供更大安全性。然而阀芯遮盖的影响意味着必须向阀电磁铁线圈提供一定的最小信号值,然后系统中才出现可感觉到的动作。如图11-6(a)所示。 为了降低成本,改善工艺性,比例方向阀的节流边约有15%~20%I max的覆盖量,通常正反两个方向均有死区存在,且其大小不同。为了提高控制质量,需要设法消除该死区,常用的方法是利用阶跃信号产生快调电路,是阀芯迅速越过死区,如图11-6(b)所示。 图11-6(a)死区的形成图11-6(b)死区补偿(5)斜坡控制与方向识别 斜坡信号用于控制信号的上升变化和下降变化的速度(如摊铺机的起步,停机过程,前后行驶控制中死区的过渡等),使当输入阶跃信号时,能够以可调的速率无冲击的到达给定值的要求,从而获得平稳而迅速的起动,转换或停止,进而提高机器的作业效率。放大器上的可调的斜坡函数发生器实际上是通过电位器调整斜坡信号的角度,而不是斜坡时间,如图11-7(a)所示。现代数字控制技术中,为了实现更精确和舒适性的要求,其斜坡的形式利用软件技术可以按人为设计的曲线形式来控制。 在比例方向阀放大器中,象限识别(即方向识别)用于两个运动方向的加速和减速控制,如图11-7(b)所示。图中比例阀控制执行器,电磁铁a通电使缸活塞沿“前进”方向移动。加速度可由加速斜坡A来控制。为了使活塞运动反向,活塞先以由减速斜坡D确定的变化率减速,随着阀芯越过中位和电磁铁b通电,活塞在此以加速斜坡A确定的变化率沿后退方向加速,因而可以看到,在X与Y点之间阀芯在阀体中沿同一方向运动,但阀芯运动速度会在
SVPWM逆变器死区效应补偿方法的研究
SVPWM逆变器死区效应补偿方法的研究 DEAD-TIME COMPENSATION FOR VECTOR-CONTROL INDUCTION MOTOR PWM INVERTER 王高林,贵献国,于泳,徐殿国 (哈尔滨工业大学电气工程系,黑龙江省 哈尔滨市 150001) (Email: Wanggl@https://www.360docs.net/doc/5d5307211.html,, Xianggui@https://www.360docs.net/doc/5d5307211.html,, Yuyong@https://www.360docs.net/doc/5d5307211.html,, Xudiang@https://www.360docs.net/doc/5d5307211.html, ) 摘要:针对伺服系统矢量控制系统,提出了一种可以补偿死区误差电压并消除零电流钳位效应的死区补偿方法。在分析了影响死区效应的因素以及等效死区时间的表达式的基础上,采用平均死区时间补偿法,在两相静止轴系中对等效死区时间产生的误差电压进行了补偿。为了提高电流极性检测的准确性,利用旋转轴系中的励磁电流和转矩电流分量经过坐标反变换,判断电流在两相静止轴系所处的扇区来决定需要施加的补偿电压。另外为了更好地消除由于死区时间而产生的零电流钳位效应,将一种消除零电流钳位效应的方法结合到上述补偿方法中。最后通过TMS320F2812 DSP芯片来实现补偿算法,并在11kW 伺服电机矢量控制系统中验证了补偿算法的有效性。 ABSTRACT: A dead-time compensation strategy is presented to compensate dead-time error-voltage and eliminate zero-current clamping effect for servo motor vector control system. The factor influencing dead-time effect is analyzed, and expression of equivalent dead time is deduced. Average dead-time compensation technique is adopted to compensate error-voltage at two-phase stationary frame. To improve accuracy of detection of current direction, components of magnetizing current and torque current are transformed into two-phase stationary frame. Therefore compensating voltage vector can be decided according to the sector the current vector is locating. In addition, a kind of zero-current clamping effect eliminating scheme is adopted combining with the above compensation method to improve the compensation performance. The proposed compensation method is performed with TMS320F2812 DSP chip. Experimental results demonstrate the efficiency of the dead-time compensation method in 11kW servo motor vector control system. 关键词:伺服系统,空间矢量PWM,死区效应,零电流钳位,补偿 KEY WORDS:servo system; space vector PWM; dead-time effect; zero-current clamping; compensation 1 引言 由于伺服系统在各种工业场合应用非常普遍,永磁伺服电机相关控制技术研究也获得了广泛重视,其中空间矢量脉宽调制技术(SVPWM)一直是一个热门的研究课题[1,2]。在SVPWM逆变器中,为了防止同一桥臂的两只开关管产生直通,需要在两只开关管的开通与关断时刻之间加入一定的死区时间,所产生的死区效应会造成逆变器输出电压基波分量减小、输出电流波形畸变及输出转矩脉动[3]。在感应电机矢量控制场合,往往需要知道电压的状态量,由于输出电压是由离散的脉冲组合而成难以测量,通常直接将参考电压当作输出电压。但与参考电压相比,实际的输出电压由于受死区时间影响而与参考电压有所差别。因此为了能够进一步提高感应电机的控制性能,有必要对死区效应进行有效地补偿。 已经有众多学者对死区效应进行了研究,并提出了许多补偿方法[3-10]。这些方法基本上可以分为两种,一种是基于平均误差电压补偿法,这种方法具有易于实现的优点,缺点是补偿不够精确,后来又有学者对开关器件管压降引起的附加死区时间,以及电路中寄生参数对死区效应的影响进行了研究[11,12]。另一类方法是基于脉冲的补偿方法,这种方法可以对死区时间进行较精确地补偿,但对控制芯片的要求也更高,要求在一个PWM载波周期内进行两次采样[12]。死区补偿中电流极性的检测很重要,如果对电流过零点判断不够准确反而会引起误补偿。尽管很多补偿方法能够取得不错的补偿效果,但在低速轻载的场合,经常会发生零电流钳位的现象,使输出电流产生畸变[12]。本文研究了一种采用平均误差电压补偿法并结合消除零电流钳位效应的方法对感应电机PWM逆变器的死区效应进行了补偿,最后在11kW伺服
反激式微型逆变器建模方法
反激式微型逆变器建模方法 冯夏云1,2,吴春华1,2,3,汪 飞1,2 (1.上海大学机电工程与自动化学院,上海市200072;2.上海市电站自动化技术重点实验室,上海市200072; 3.上海岩心电子科技有限公司,上海市200072) 摘要:研究了反激式微型逆变器数学建模问题。针对现有建模方法中采用电阻等效代替电动势负 载的做法导致模型不精确,以及无法得到诺顿等效模型的问题,提出了一种基于小信号分析的改进建模方法,利用该方法建立了反激式微型逆变器系统结构框图,得到了系统准确的诺顿等效模型。最后,分别进行了理论分析和仿真验证,并设计了250W样机进行了实验验证。关键词:反激逆变器;微型逆变器;小信号分析;诺顿等效模型 收稿日期:2015‐10‐22;修回日期:2016‐02‐18。上网日期:2016‐05‐30。 国家自然科学基金资助项目(51107078)。 0 引言 随着能源和环境问题日益突出,以分布式光伏发电为代表的新能源技术应用日益广泛。并网逆变器作为光伏发电系统的关键部件受到了越来越多的关注。20世纪70年代,美国加州理工学院喷气推进实验室(Caltech’sJetPropulsionLaboratory)提 出了微型逆变器的概念[1] ,设想为每块光伏组件安装一个微型逆变器,以实现光伏组件的独立并网发电。相比传统的组串式逆变器,微型逆变器在成本上不具备优势,但可以很好地解决传统组串式逆变器并网时光伏组件参数差异或组件局部阴影导致的 功率损失等问题[1‐3] 。 在微型逆变器研究中,为实现高效率、高功率密度电能变换及大范围升压比等目标,文献[4‐5]提出了基于反激变换器的微型逆变器拓扑,即反激逆变器。反激逆变器存在3种工作模式:断续电流模式(DCM)、临界电流连续模式(BCM)和连续电流模式(CCM)。其中DCM因功率密度低和效率低而很少 被采用[5] ;BCM控制复杂,其峰值电流较大,因此对开关器件电压应力要求较高[6];CCM峰值电流较小,具有较高的效率,但是CCM存在右半平面零 点,对比例—积分(PI)控制设计提出了要求[7] 。本文选择研究CCM下的反激逆变器,深入研究其建模方法。 近年来,文献[8‐14]研究了CCM下的并网型反激逆变器补偿控制器设计,但建模时负载采用等效 电阻。该类方法主要用于设计系统的PI控制器,但是因缺乏考虑电网电动势负载而无法复现系统固有谐振点。文献[15]的反激逆变器建模,主要利用时域表达式对开关周期下变压器的原、副边电流进行平均化建模,虽然考虑了电网电动势负载,但是该种方法主要用于BCM,无法应用于CCM。文献[16]虽然研究了CCM的反激逆变器,并在建模过程中考虑了电动势负载的特殊性,提出了一种基于变压器原边电流的优化控制方法,用以改善并网电能质量,但缺乏考虑系统外特性或阻抗特性。根据电路原理,电流源并网逆变器模型应当采用诺顿等效模型表示,设计优良的电流源除了有稳定的控制输出外,其闭环输出阻抗也应越大越好。近年来,基于输出阻抗的分析方法被较多地应用于组串式光伏并网逆变器外特性研究,以及多逆变器并联与电网谐波 交互的研究上[17‐19] 。然而现有文献缺乏对反激逆变器闭环输出阻抗研究的报道,不利于进一步指导优化设计方案和分析多微型逆变器与电网谐波交互问题。总之,现有文献主要应用于确定反激逆变器的PI控制器参数,没有从整体上考虑反激逆变器的内部结构,因而无法得到系统精确的数学模型,也不利于揭示系统外特性。 基于此,本文在考虑以电网电动势为负载的前提下,利用状态平均法构建系统结构框图,得到了反激逆变器精确的诺顿等效模型,方便地确定了系统闭环输出阻抗。然后,采用MATLAB和PSIM仿真平台分别对反激逆变器进行了理论分析和仿真验证。最后,本文设计了250W样机来验证本文提出方法的正确性。 0 01第40卷 第14期 2016年7月25日 Vol.40No.14July25,2016 DOI:10.7500/AEPS20151022007
永磁同步电机逆变器死区补偿技术
永磁同步电机逆变器死区补偿技术 现今工业伺服驱动中多采用驱动永磁同步电动机(PMSM)的交流伺服系统,其交流驱动单元使用三相全桥电压型逆变器。PWM调制的变频控制技术实现了对交流电机动态转矩的实时控制,大大提高了伺服系统的控制性能。 然而,对于PWM逆变器,在驱动功率管的开关信号中插入延时时间以防止直流母线直接短路,延时时间的引入将导致死区时间效应,引起逆变器输出波形的畸变和基波电压的降落,影响了伺服系统性能的进一步提高。 为补偿Td引起的电压波动,研究人员提出了各种补偿方法,大致可划分为三类。 最普遍的方法是在电流极性相同的区间内,根据缺少的脉冲列相应加上极性相反的脉冲列,以抵消其影响。由于三相电流必有一相与另两相极性相反,一种简单的方法是对极性相反的相实行二倍的电压过补偿,使三相电压死区影响相互抵消,线电压波形为正弦形。详细分析了死区产生的原因和影响,并根据模拟调制和数字调制分别给出了死区的硬件电路补偿方法。文献[3]根据全桥电路的开关状态,提出了一种带死区补偿的逆变器数学模型,该模型的特点是由简单的滞环结构组成,根据此模型可由一计算公式实现死区补偿。 第二类方法是根据无效器件原理实现死区补偿的。在任意时刻,逆变器每一桥臂两个功率器件中只有一个是有效的。当上桥臂器件关断时,不论下桥臂器件是否导通,输出电压都是直流母线的负端电压,此时称下桥臂器件是“无效”的。死区补偿的办法是,维持有效器件的驱动信号不变,改变无效器件的驱动信号使之满足设置死区的要求。既然“无效”器件的通、断并不影响输出电压状态,那么也就不需要驱动信号了,只给有效器件发出驱动信号就可以了,这样也就不需要加入死区,也就没有什么死区补偿的问题了。但该方法在电流过零点处会由于误差导致畸变,因此使用这个方法时要注意电流过零区域的处理。一些学者进一步提出了改进方法。在电流过零点加一滞环,在滞环时间内使用正常的开关死区保护,可减小畸变。由于电流采样中的干扰和电流变化的复杂性,文献[5]在电流过零点附近的区域应给出两路驱动信号并加入死区及死区补偿。利用PWM关断时刻实现换流时的开关死区保护,可消除开关死区的影响。 第三类方法是电流预测控制。建立较为准确的电机系统模型,分析电流波形的畸变量,通过电流的预测控制来实现电流波形的校正。提出了预测电流控制的死区问题,通过估计反电势补偿电压波形畸变和电流零点钳位现象。文献[7]建立异步电机模型的矩阵方程,根据对SVPWM算法里定子相电流的预测,补偿其空间电压矢量。利用d-q旋转坐标系下的PMSM 模型设计观测器,观测q轴损失的电压,通过公式折算成需补偿的死区时间Tc,实现死区的在线补偿。时间延迟控制来估计死区导致的干扰电压,并将其反馈到电压参考给定上以补偿死区影响。电流预测方法计算繁琐,且补偿效果与电机模型的精度和时变的参数值直接相关,不易得到满意的效果。 逆变器死区的影响 由PWM死区时间产生的基本原理可知,引起的逆变器输出电压的偏差脉冲在绕组电流周期T1内的电压偏差可用一方波来等效,为了分析方便,假定电压偏差脉冲在时间上是等
基于直流电压调节的死区效应削弱方法研究
第47卷 2014年 第6期6月MICROMOTORSVol畅47畅No畅6Jun畅2014 收稿日期:20131021 作者简介:王晓远(1962),男,博士,教授,研究方向为电机电器的设计与控制。 张志军(1987),男,硕士,研究方向为电机电器的设计与控制。基于直流电压调节的死区效应削弱方法研究 王晓远,张志军 (天津大学电气与自动化工程学院,天津300072) 摘 要:在变频调速系统中为了防止同一桥臂上的两只开关管直通引入死区时间,但它造成相电流畸变转矩脉动。本文通过分析系统在轻载低速运行时的特点提出了一种基于直流母线电压调节的死区削弱方法,虽然此方法不能完全消除死区效应,但可以在不增加系统芯片运算量的情况下极大地改善电流波形,降低转矩脉动。最后通过仿真和实验分别验证了该方法的有效性和可行性。 关键词:变频调速;死区时间;脉宽调制 中图分类号:TP273 文献标志码:A 文章编号:1001-6848(2014)06-0022-04 StudyonDeadZoneEffectWeakenedMethodBasedonDCVoltageRegulation WANGXiaoyuan,ZHANGZhijun(TianjinUniversity,Tianjin300072,China) Abstract:Inthevariablefrequencyspeedregulationsysteminordertopreventthesamebridgearmtwoswitchtubethroughintroducingdeadzoneoftime,butitcausephasecurrentdistortiontorqueripple畅ThisarticlethroughtheanalysissysteminlightloadslowrunningcharacteristicsoftheproposedbasedonDCbusvoltageregulationofthedeadzoneweakenmethod,althoughthismethodcannotcompletelyeliminatedeadzoneeffect,butcannotincreasethecomputationsystemonachipundertheconditionofgreatimprovecur-rentwaveformtoreducetorqueripple畅Atlast,throughsimulationandexperimentswereverifiedtheeffec-tivenessandfeasibilityofthismethod畅Keywords:Frequencycontrolofmotorspeed;Deadzonetime;Pulsewidthmodulation 0 引 言 脉冲宽度调制(PWM)技术现已普遍用于整流逆 变调速等系统中。在使用PWM技术时为了防止同一 个桥臂的两个管开关上下直通,需要在开通和关断 时刻之间加入一定的死区时间。由死区时间所产生 的死区效应使得逆变器输出电压的基波分量减小、 谐波增大,造成电流波形畸变导致转矩脉动。 死区效应的补偿问题是逆变器、变频调速等系 统开发过程中的一个重要难点。针对死区问题已有 不少文献做过相应的研究,其基本原理都基于一个 本质[1-5]:增大或减小给定脉冲宽度使其实际大小与 期望大小相等。 本文通过分析逆变器在低频轻载和高频重载下 的死区效应影响的区别,提出了一种基于直流母线 电压调节的死区效应削弱方法,该方法通过改变直 流母线电流可以极大地降低死区效应对低频轻载时的影响。 1 死区效应及其影响因素分析理想PWM逆变器单个桥臂的一个开关管关断时另一个管子立刻开通,但实际上由于死区时间的加入,使得在死区时间内两个管子都关断,电流只能通过二极管续流。电压型逆变器主电路如图1所示,文献[1-4]均对开关管的开关过程进行了详细分析,最后都得出了与死区时间相对应的偏差电压。图1 逆变器主电路
单相太阳能光伏并网反激逆变器
电力系统及其自动化·527· 单相太阳能光伏并网反激逆变器 谭光慧纪延超张大禹王建赜 哈尔滨工业大学电气工程系黑龙江哈尔滨 110178 【摘 要】提出一种用于太阳能光伏发电的交流模块逆变器,它由前置Buck-Boost变换器和后置反激逆变器有机组合在一起。基于电容闲置技术,所提逆变器拓扑可实现开关管的零电流开 通和零电压关断。除此之外,逆变器通过将直流输入侧的功率脉动转移到一个小电容上, 改善了功率解耦特性。采用简单的控制方法确保实现最大功率点跟踪且向电网注入纯净的 正弦电流。所提逆变器具有低的电流畸变、高的功率因数、小的解耦电容和软开关运行等 优点。上述特点通过分析和实验进行了验证。 【关键词】反激逆变器光伏软开关电容闲置 Single-Phase Flyback Grid-connected Inverter for photovoltaic Application Tan Guanghui Ji Yanchao Zhang Dayu Wang Jianze Department of Electrical Engineering,Harbin Institute of Technology,Harbin 110178,Helongjiang,China Abstract:This paper presents an AC Module inverter for photovoltaic(PV)application. The PV inverter employs a Buck-Boost converter on the DC side and a flyback inverter on the AC side. Based on capacitive idling(CI)techniques,the proposed circuit topology can obtain soft-switching operation with zero current switching(ZCS)or zero voltage switching(ZVS). Furthermore,the power pulsation on the DC bus is converted into the voltage pulsation on a film capacitor to obtain improved power decoupling. A simple control method is also proposed to ensure maximum power point tracking(MPPT)and pure sinusoidal output current. As a result,the proposed inverter provides low current distortion,high power factor,small power decoupling capacitor and soft-switching operation. Analysis and experimental results are provided to demonstrate these excellent features. Key words:Flyback inverter;Photovoltaic;Soft-Switching;Capacitive idling 随着全球经济的快速发展,传统化石能源的大量消耗使全球面临着能源危机,世界各国都在致力于新能源的开发和使用。太阳能以其资源丰富、分布广泛、可以再生、不污染环境等优点,受到学者们的高度重视[1]。 在一般的光伏发电系统中,一系列的光伏组件组成光伏阵列来获取足够的直流总线电压,再通过逆变器逆变产生交流电压并入电网。但是由于太阳能辐射强度的变化以及附近建筑物、树木等障碍物的遮挡,光伏阵列的总输出功率会有明显的变化[2]。为了使光伏系统始终工作在最大功率点上,交流模块的思路被提出[3]。交流模块定义如下:“交流模块是一种电气装置,它由单个光伏组件和单个电力作者简介:谭光慧(1979—),男,博士研究生,研究方向为电力电子技术在电力系统中的应用。电话:0451-********-804,E-mail:guanghtan@https://www.360docs.net/doc/5d5307211.html, 通信作者:纪延超(1962—),男,教授,博导,研究方向为电力电子技术在电力系统中的应用。电话:0451-********-804,E-mail:powerstar@https://www.360docs.net/doc/5d5307211.html,
PWM型逆变器死区问题的解决
电源技术 < 2008年5月 20 ■<阿城继电器股份有限公司电源公司 李文全 引言 PWM 电压型逆变器广泛地应用于交流变速传动系统和不停电电源中。逆变器的输出电压波形的质量尤为重要。理想的电压波形通常为纯正的正弦波,但实际上在输出级存在着是输出波形畸变的固有源,因而输出波形存在较大的畸变。其中一个重要的畸变根源是同一桥臂上、下两个器件在开关过程中必有一个死区时间,以防止桥臂直接短路。另外一些根源如开关器件的导通压降、开关时间等。每个PWM 调制周期内引起的微小畸变经积累后,会引起输出电压波形较大的畸变,降低基波幅值,改变低次谐波含量,曾加电机的谐波损耗。因此必须对逆变器的死区问题进行补偿。 在死区期间,逆变器输出的电压不受逻辑信号控制,而是有输出电流的极性确定,通过反馈二极管嵌位在直流回路的正侧或负侧。因此电流极性的检测是死区补偿的关键技术。本文对死区时间引起的逆变器输出电压畸变进行了详细分析,给出了电流极性检测方法和死区效应的电压补偿方法。 1 PWM逆变器死区效应的分析 不失一般性,以逆变器其中的一个桥臂A 相为例(如图 1)。在死区期间,上、下两个功率器件均不导通,只有一个二极管导通续流。若电流流向负载,则下面的二极管导通;反之,上面的二极管导通。控制信号与电压波形如图2所示。 对于i>0(流向负载)而言,如图2(a )、(b )、(d)所示。当A -信号在T 1时刻关断,延时死区时间T d 后,A +变为高电平(图2d );在T 2时刻A +变为低电平,延时T d 后A -变为高电 平(图2b ),此时电压U AN 时电压U AN 经过开关管的关断时间t off 后变为低电平(图2d )。因而U AN 为高值的实际时间是T 2 –T 1 +T off –T on –T d ,标准时间应为T 2 –T 1,因而,死区时间和开关管共同引起的导通时间误差为 T err = T off –T on –T d (1)同理,当时 i<0时,由图2(a 、b 、c )可得时间误差为 T err = -(T off –T on –T d ) (2)因此误差时间为T err = sign(i)(T off –T on –T d ) (3) 其中sign(i)= PWM型逆变器死区问题的解决 摘要:本文对PWM电压型逆变器的死区问题提出了一种实时补偿方法,设计了电流瞬时值过零点的检测方法,该方法简单易行,可适用于变压变频调速系统中。 关键词: PWM逆变器 电流检测 死区补偿 图1 逆变器桥臂 图2 PWM逆变器控制信号与输出电压波形
一种基于空间矢量PWM的死区效应补偿策略研究
一种基于空间矢量PWM的死区效应补偿策略研究 1 引言 目前,随着电力电子技术的发展,功率器件如igbt、mosfet等广泛应用于pwm变流电路中。对于任何固态的功率开关器件来讲,都具有一定的固有开通和关断时间,对于确定的开关器件,固有开通和关断时间内输入的信号是不可控的,称为开关死区时间,它引起开关死区效应,简称为死区效应[1,2]。在电压型pwm逆变电路中,为避免同一桥臂上的开关器件直通,必须插入死区时间,这势必导致输出电压的误差。该误差是谐波的重要来源,它不但增加了系统的损耗,甚至还可能造成系统失稳。对于电机驱动系统而言,死区效应会使得低速时的电压及电流发生严重畸变,引起转矩脉动和谐波。 本文分析了死区时间的产生以及对输出电压的影响。在此基础上,引入电流预测补偿方法,对其理论进行分析并进行了仿真与实验。 2 死区效应分析[3,12] 以逆变器的其中一个桥臂为例,进行分析死区时间的影响。假设负载为感应电机,如图1所示。 图1 逆变器一相桥臂的死区效应分析 在功率器件开通关断时,逆变器输出电压由于死区的影响在电流极性不同时会表现出不同的形式。当开通功率开关管(igbt)vt2时,vt1必须关断,如果开通速度比关断速度快,将会在桥臂上产生直通电流而导致损坏器件,因此需要插入死区时间。由于是感性负载,输出电流i1通过续流二极管进行续流,二极管的导通取决于电流i1的方向。当i1>0时,有两种工作状态,正常工作状态时,桥臂的上管vt1开通,vt2关断,电流通过vt1流向电机;而在死区时间内,vt1、vt2都关断,此时电流通过下
管的续流二极管vd2完成续流,保持电流流向电机。当i1<0时,同样也有两种工作状态:正常工作状态时,下管vt2开通,上管vt1关断,电流通过vt2形成通路;在死区时间工作状态时,vt1、vt2都关断,此时电流通过上管的续流二极管vd1完成续流,保持电流形成通路。尽管逆变器死区时间很小,单个脉冲不足以影响整个系统的性能,但连续考虑一个周期的效应,死区的积累作用使得电动机的定子电压受到很大的影响。受死区的影响,输出电压产生的畸变分析如图2所示。 图2 死区对逆变器输出电压的影响 图2中:a) 理想的驱动波形;b、c) 带有死区的上下管驱动信号;d) 电流方向; e) 逆变器的实际输出电压;f ) 为误差电压波形。 3 电流预测补偿法[4,5] 电流预测补偿方法是将预测控制用于对电压型逆变器的控制,基本思路是在第k个采样时刻根据所检测到的负载电流及补偿器输出电流、电动机的数学模型以及下一个开关周期k+1时刻的期望电流,计算出符合电流变化的输出电压矢量,然后在pwm中运用空间矢量法合成这一输出电压矢量,从而迫使下一次采样时刻的实际电流以最优特性跟踪下一个时刻参考电流,达到跟踪输出电流的目的。在对三相异步电机进行分析和控制时,将其等效为一个带有反电动势的r-l负载电路,如图3a)所示。为便于分析,这里进行坐标变换,将对称三相静止坐标系变换到d-q坐标系,如图3b)所示。
光伏逆变器中反激式辅助开关电源的设计
光伏逆变器中反激式辅助开关电源的设计 发表时间:2017-05-25T10:23:18.713Z 来源:《基层建设》2017年4期作者:谭宁 [导读] 摘要:光伏逆变器系统需要稳定、高效的辅助电源,因此对该电源的设计方法、工作原理加以分析显十分重要。 易事特集团股份有限公司 摘要:光伏逆变器系统需要稳定、高效的辅助电源,因此对该电源的设计方法、工作原理加以分析显十分重要。在对其进行系统化分析的基础上,使用TOP258智能开关电源芯片,设计出多路隔离的反激式辅助开关电源,用作为光伏逆变器的辅助电源。其具有的体积小、效率高等优点,可以很好的满足光伏逆变器的使用需求。 关键词:反激式变换器;多路隔离;辅助开关电源;光伏逆变器 科学技术的飞速发展,为人类社会的物质生活水平的提升奠定了良好的基础,随之产生的问题也逐渐呈现出来,对于能源的短缺以及环境污染问题被世界国家更加重视,如今,清洁以及安全的光伏发电技术已作为重要研究课题。 在光伏发电系统中,光伏逆变器是其重要构成部分,其自身的安全、高效运行成为了重要基础。因为逆变器本身系统的特殊性,致使其控制系统以及通信系统等要求使用±15V及5V等多路隔离电源,所以设计一个结构简单、安全可靠、性能优越的辅助电源对光伏逆变器的运行有着至关重要的影响,确保运行的安全性和效率成为了人们考虑的首要因素。与此同时,在一般情况下,控制电路与功率MOSFET分开结构的反激式开关电源系统,具有运行成本高、开发周期长的特点,其结构的复杂性同时也增加了使用难度,降低了使用效率。PowerIntegrations公司推出的第五代开关电源芯片TOP258,具有诸多优点,它将结合自启动电路、维系电路、PWM控制电路以及功率MOSFET等在一块,让得系统更加简单,运行成本降低,运行高效稳定。故本设计将TOP258作为开关电源控制器,在此基础上开展设计和研究。 1 对TOP258开关电源控制器概述 所谓TOP258,其为一款集成式开关电源芯片,可以把控制引脚输入电流转化成高压功率MOSFET开关输出的占空比。按照器件的固有特性,MOSFET开关输出电压的占空比随着控制脚输入电流的增加而降低。 对于TOP258芯片来讲,其优点较多,不但拥有高压启动、自动重启、周期电流限制以及热关断等特点,还具备其他设计灵巧、减少运行成本以及增加电源性能等优点[1]。而且,TOPSwitch的一些型号使用高压CMOS 技术,可以很好地把MOSFET及低压控制电路集合到一片集成电路中,可以到达很高的性价比,因此对于小功率的开关电源很适合,其特点主要为: a.能够在17 ms内完成软启动,使用扫描,能够很好限制启动时峰值电流以及电压; b.输出电压的最大占空比最大可达到78%,设计选型时可以选用更小的电容; c.系统可以多种模式稳定工作,还实现了整个负载范围内的电源效率优化。 2 电路设计 构建的反激式开关电源主要采用TOP258单片开关电源控制芯片,其系统原理如图1所示。能够接受直流输入范围:170~400 V,输出包括六路:±15V(200mA),+15V1(300 mA),+15V2(150 mA),+15V3(150mA)以及5V(3000mA)。设计的高频变压器额 定输出功率:30W。参照电源功率选择开关电源控制器:TOP258。 2.1 初级钳位保护电路 对于反激式辅助开关电源系统设计时,MOSFET开关管关断一瞬间,高频变压器的漏感产生尖峰电压(VL),同时,高频变压器的二次侧绕组输出电压经过变压器器耦合到原边,此时变压器的原边输入直流电压、原边漏感产生的电压尖峰以及副边反射到原边的电压全部叠加MOSFET漏源极,很易损坏MOSFET,所以要在设计中增加保护电路,削减和吸收有害的尖峰电压。 本设计选取了快速恢复二极管、阻容式吸收元件以及TVS管,这样组成了限幅吸收电路(R、C、TVS、VD型),保证了电源系统能可以很好发挥出TVS快速响应优势特点,而且能够承受瞬态高能量脉冲,同时限幅电路还兼具RC吸收回路的能力。 2.2 对回路设计进行反馈 进行设计时,选取TL431以及光耦构成反馈电路,对于5V电压反馈信号,其通过R6以及R8进行分压,然后进到TL431的Ref管脚端,进而转成电流反馈信号,最后通过光耦隔离,再送入TOP234Y的控制端。对于光耦电流传输比允许50%~200%的范围。
死区补偿
1 引言 目前,小功率通用或专用变频器以及交流变频家电产品大多采用典型的交-直-交电压型逆变器(vsi)结构,逆变实现一般采用双极性pwm 调制技术,即在同一逆变桥臂上、下2个开关管施加互补的触发信号。由于开关管自身的特性:开通和关断都需要一定的时间,且关断时间比开通时间要长。因此,若按照理想的触发信号控制开关管的开通和关断,就可能导致同一桥臂的2个开关管直通而损坏开关器件。为了防止这种直通现象的发生,必须在它们开通和关断之间插入一定延时的时间,这个延时时间就称为死区。死区时间内2个开关管都处于关断状态,负载电流通过反并联二极管续流,负载电压不受开关管控制,由此造成负载电压波形发生畸变,逆变器的平均输出电压降低,并产生与死区时间以及调制比成正比的3,5,7,…次谐波分量,进而影响到电动机的输入电流和运行质量。当逆变器工作在低输出频率、开关频率较高和负载感性很弱时这种影响相当严重[1,2]。为此,需要对死区的影响进行补偿,以提高变频器的输出性能和改善电动机的运行工况。常用的补偿方法有电流反馈型和电压反馈型,也有单边补偿与双边补偿、纯硬件补偿与硬件软件结合补偿等具体手段,但其工作原理相似,都是产生一个与死区引起的误差波形反向的波形,以抵消死区的作用[3,10]。motorola公司推出的电动机专用控制芯片mr16内部集成了专门的死区补偿硬件电路,只需要简单的外围电流极性检测和简单的软件编程就可以实现可靠的死区补偿[11]。 2 死区补偿原理分析 2.1死区对输出电压的影响 在理想情况下,功率开关管开通和关断都是瞬时完成,不存在开通和关断时间,因而也就不存在死区时间。但实际情况是功率开关管并非理想开关,而且关断时间比开通时间要长。为了使功率开关管工作安全,在其开通之前插入死区td,即让该桥臂的2个开关管在td时间内都处于关断状态。由于死区时间td的存在,使得功率开关管的导通时间缩短,引起pwm脉冲宽度和电位的丢失,进而影响到逆变器输出的平均电压。 图1 死区对输出电压影响示意图 下面以三相逆变桥中的一相为例,分析死区对输出电压的影响。不妨设电流正方向如图1中箭头方向所示,假设当前死区发生时,电流方向为正,这时igbt1和igbt2都没有驱动信号,处于关断状态,驱动信号如图1中的(2)和(4)。由于当前电流方向为正,所以感性负载通过下桥臂的续流二极管d2续流,因此将输出电压箝制在-udc/2电位上,输出电压波形如图1中的(6)所示。也就是说在死区期间,输出电压多出一个td宽度的负电位。实际输出电压与理想输出电压相比,正电压的脉冲宽度减小,输出电压小于期望值,如图1中的(6) 和(5)所示。当电流为负方向时,感性负载通过上端的二极管d1进行续流,这时负电压脉宽减小,输出电压大于期望值,这里不给出示意图。这样,逆变器的实际输出电压的波形与理想波形比较就发生了畸变。图1中的(1)、(3)和(5)分别为理想情况下的上管驱动信号、下管驱动信号和输出电压,(2)、(4)和(6)分别为实际情况下的上管驱动信号、下管驱动信号和输出电压。
开关死区对SPWM逆变器输出电压波形的影响
开关死区对SPWM逆变器输出电压波形的影响 类别:电源技术阅读:1379 作者:北京航天工业总公司二院206所刘凤君(北京100854)来源:《电源技术应用》开关死区对SPWM逆变器 输出电压波形的影响摘要:分析开关死区对SPWM逆变器输出电压波形的影响,讨论考虑开关死区时的谐波分析方法,并导出谐波计算公式。用计算机辅助分析和实验方法对理想的和实际的SPWM逆变器进行对比研究,得出一些不同于现有理论的结果。关键词:逆变器脉宽调制谐波开关死区 1 引言对于SPWM三相半桥式逆变器,由于开关管固有开关时间ts的影响,开通时间ton往往小于关断时间toff,因此容易发生同臂两只开关管同时导通的短路故障。为了避免这种故障的发生,通常要设置开关死区△t,以保证同桥臂上的一只开关管可靠关断后,另一只开关管才能开通。死区的设置方式有两种:一种是提前△t/2关断、延滞△t/2开通的双边对称设置;另一种是按时关断、延滞△t开通的单边不对称设置。典型的电压型三相SPWM半桥式逆变器如图1(a)所示。其中图1(b)是死区对称设置时的波形图;图1(c)是死区不对称设置时的波形图。在这两种波形图中,uAO为相与直流电源中点“0”之间的理想电压波形(载波比N=(ωc/ωs)=9),uAO′为设置死区时的电压波形。 在感性负载时,当V1导通时A点为+(Ud/2),当V4导通时A点为-(Ud/2)。在死区△t内V1和V4 都不导通时,感性负载使D1和D4续流以保持电流iA连续。当iA为正时D4续流,A点与直流电源负极接通,A点电位为-(Ud/2);当iA为负时D1续流,A点与直流电源正极接通,A点电位为+(Ud/2),这样就产生了误差电压uD1.4。uD1.4与uAO′叠加就产生出实际输出电压uAO″。比较uAO″与uAO可知,实际输出电压发生了畸变。在iA为正时所有正脉冲宽度都减小△t,所有负脉冲宽度都增加△t;在iA为负时所有负脉冲宽度都减小△t,所有正脉冲宽度都增加△t。这是由死区△t内的二极管续流造成的,畸变后的实际输出电压波形如图中uAO″所示。2 实际输出电压uAO″的谐波分析假定载波与调制波不同步,则在调制波各周期中所包含的脉冲模式就不相同,因此不能用调制波角频率ωs为基准,而应当用载波角频率ωc为基准。这样,研究它的基波与基波谐波、载波与载波谐波及其上下边频的分布情况时,就能很方便地用双重傅立叶级数来表示: 2.1 死区双边对称设置时uAO′的谐波分析 如图1(b)所示,uAO′相当于二极管不续流时输出电压的波形。载波三角波的方程式为: 正弦调制波的方程式为:us=Ussinωst 对于理想波uAO,二阶SPWM波正脉冲前沿(负脉冲后沿)采样点a为:Ussinωst=-(ωct-2π-π/2)2Uc/π-Uc 令x=ωct;y=ωst;M=Us/Uc,则可得 x=2πk+π/2-π/2(1+Msiny) 二阶SPWM波负脉冲前沿(正脉冲后沿)采样点b为: Ussinωst=(ωct-2πk-π/2)2Uc/π-Uc x=2πk+π/2+π/2(1+Msiny) 对于图1(b)中uAO′,在x=ωct的2πk-π/2到2π(k+1)-π/2区间内,可以得到二阶SPWM波的时间函数为: y=(ωs/ωc)x,k=0,1,2,3…经分析可以得出: 2.2 对死区双边对称设置时uD1.4的谐波分析图(1)b中误差波uD1.4,其双重傅立叶级数中的Amn+jBmn=-(Ud/mπ)Jn((mMπ/2))[cos(m+n]π+1]sinm(△tωc) (3) 对于载波及载波m次谐波的上下边频:2.3 死区双边对称设置时uAO″的谐波分析由图1(b)可知,实际波uAO″等于有死区波uAO′与误差波uD1.4之和。由于死区是双边对称设置,所以uAO′与调制波uS相位相同,电流iA滞后于uAO′一个φ角,而误差波uD1.4又与iA相位相反,因此,uD1.4的相位超前于uAO′180°-φ,如图(2)所示。因此,当以uAO′的相位为基准时可得: uAO′与uD1.4的基波幅值uAO(1)′=MUd/2;