太阳帆航天器行星际轨道转移优化算法
GPS轨迹优化算法审批稿
G P S轨迹优化算法 YKK standardization office【 YKK5AB- YKK08- YKK2C- YKK18】
运动公会:GPS轨迹优化算法 当前问题描述: 1、定位精度:控制在<50m,而非根据具体场景(机型、场地)实时控制; 2、首点(即轨迹第一个点)存在漂移现象; 3、防作弊机制放在了服务端,导致用户跑步下来,看到的跑步数据与提交后服务端处理 后的数据,不一致; 定位点(LocationPoint)的数据解析: ?GPS信号强度:signalLevel;(good/bad/unknown) ?定位精度:accuracy;(m) ?经纬度:位置点 ?时间:ms(毫秒)客户端计算 ?方向:bearing;(度) ?速度:speed;(m/s) 当前跑步轨迹定位点,只使用了前四个数据(GPS信号、定位精度、经纬度、时间); 而进一步,利用“方向”可进一步确定是否“拐点”;利用“速度”可进一步判断运动状态(相对静止、运动中(相对均速、相对加速、相对减速))。 解决思路: ?定位精度问题 思路一: 取一定数量的定位点,根据这些点的精度分布情况,确定精度最大阈值; 理论上可行,但跑步过程中,周边场地情况发生实时变化,之前确定的最大阈值是否足够合理,值得商榷; 思路二: 1、在不同的地点(居民区、商业区、空旷地带),去采集定位点的精度,根 据这些精度的反馈,确定一阈值; 2、在运动过程中,将用户设备的精度数据(设备类型+android版本+精度)实 时上传服务器,后期根据服务器保存的精度数据,看情况是否调整之前确定的精度阈值; ?首点确认问题
太阳能飞机设计
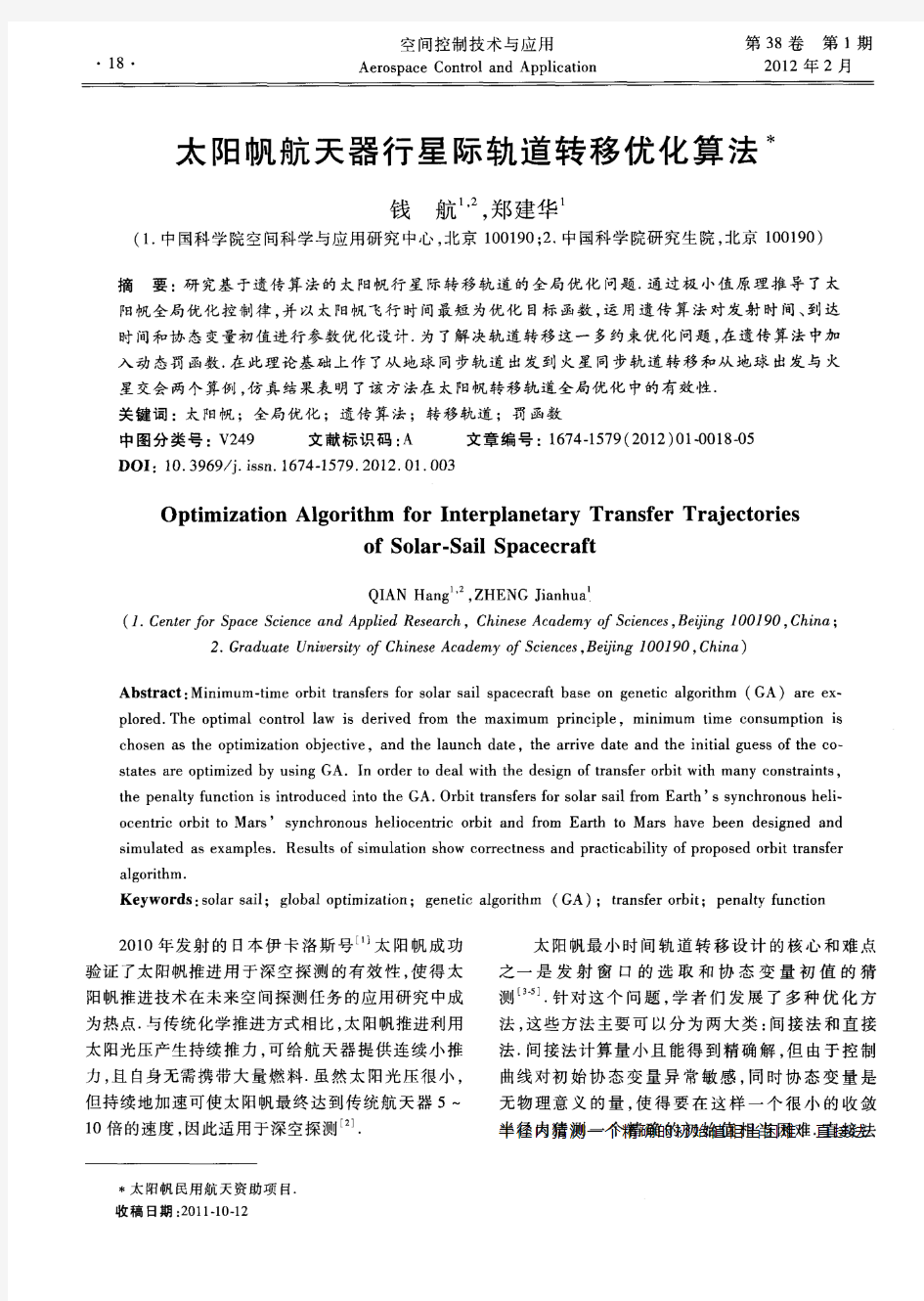
太阳能飞机设计 一.飞机的总体设计 1.1.能源规划与动力系统 1.1.1.太阳能电池板参数计算 采用的太阳能电池为单晶硅太阳能电池,参数如下: 1.1. 2.太阳能电池板的连接方式 串联:总电压等于各分电压之和,考虑到电压的损失,26块电池板串联为 一组,电压理论上为13V,总共3组。共需要78块电池板。 并联:三组13V的电源并联,总电流等于各分电流之和,实际电流大小得根 据电力系统的总电阻大小来确定。(待测定) 1.1.3.动力系统 根据节能减排的理念,飞机的动力只能由太阳能电池板提供,接收机和舵机 可单独供电,而且动力和舵机的电力系统要进行物理隔离。也就是要采用两 个接收机,一个接收机控制飞机的动力,一个控制各个舵机。控制动力的接 收机由太阳能电池板供电;控制舵机的接收机单独接一块电池。 1.2.气动外形设计 1.2.1.气动布局简述 采用常规布局,上单翼矩形机翼(矩形机翼共三段,侧翼有上反角,机翼两 侧翼梢处加翼梢小翼),矩形平尾尾翼,矩形垂尾尾翼。 1.2.2.飞机外形参数 翼展:5080mm 翼弦长度:560mm 机身全长:3040mm 1.2.3.翼型 考虑到太阳能电池效率低,动力低,故应尽可能减小飞机平飞时所受的阻力, 因此采用平凸翼型,相对厚度应较小(翼肋修长,滑翔机类翼型)的RSG-82 翼型。其max thickness 7.58% at 30.0% of the chord(在弦长距前缘30%位置 处有最大相对厚度为7.58%); max camber 3.79% at 30.0% of the chord(在弦 长距前缘30%位置处有最大相对弯度为3.79%)。 该翼型的升力系数与阻力系数以及升阻比如下图所示。 (1)RSG-82在雷诺数为300000时,其升力系数与阻力系数的极坐标图如 下。
GPS轨迹优化算法
运动公会:GPS轨迹优化算法 当前问题描述: 1、定位精度:控制在<50m,而非根据具体场景(机型、场地)实时控制; 2、首点(即轨迹第一个点)存在漂移现象; 3、防作弊机制放在了服务端,导致用户跑步下来,看到的跑步数据与提交后服务端处理后 的数据,不一致; 定位点(LocationPoint)的数据解析: ?GPS信号强度:signalLevel;(good/bad/unknown) ?定位精度:accuracy;(m) ?经纬度:位置点 ?时间:ms(毫秒)客户端计算 ?方向:bearing;(度) ?速度:speed;(m/s) 当前跑步轨迹定位点,只使用了前四个数据(GPS信号、定位精度、经纬度、时间); 而进一步,利用“方向”可进一步确定是否“拐点”;利用“速度”可进一步判断运动状态(相对静止、运动中(相对均速、相对加速、相对减速))。 解决思路: 定位精度问题 思路一: 取一定数量的定位点,根据这些点的精度分布情况,确定精度最大阈值; 理论上可行,但跑步过程中,周边场地情况发生实时变化,之前确定的最大阈值是否足够合理,值得商榷; 思路二: 1、在不同的地点(居民区、商业区、空旷地带),去采集定位点的精度,根据这些精度 的反馈,确定一阈值; 2、在运动过程中,将用户设备的精度数据(设备类型+android版本+精度)实时上传服务 器,后期根据服务器保存的精度数据,看情况是否调整之前确定的精度阈值; 首点确认问题 连续三个点为非拐点且三个点均合法,则第一个点为首点,否则去掉第一个点,继续下
面三个点进行下一步计算,直到找到首点。 首点合法的依据: 1、三个点在精度阈值范围内; 2、三个点的方向相对一致,即不存在拐点; 3、根据点与点之间的距离和时间间隔,计算其运行速度,该速度在合理的跑步速度范 围之内; 4、连续三个点,满足以上条件,则第一个点为首点; 5、否则继续去掉第一个点,继续下面三个点进行计算,直至满足前三个条件为止,确 定首点; 提交数据不一致 将防作弊机制放在客户端,服务端只记录原始数据,不做进一步的数据处理。 防作弊手段从以下几个方面着手: 1、过滤定位点漂移; 2、过滤定位点非法(结合速度); 3、加入计步,防止骑车/乘车方式作弊;(下一阶段处理..) 此次,主要结合前面2点(定位点漂移或非法),进行定位点“过滤/防作弊”处理。 判断运动中轨迹点合法的依据,具体如下: 1、定位点PointNew的精度在精度阈值范围内; 2、定位点PointNew的当前速度(Vn)在“运动速度阈值”范围之内,否则非法速度次数 +1; 3、进一步判断PointNew和上一定位点PointLast的距离与时间间隔,计算其行进速度, 在“运动速度阈值”范围内; 4、上传数据时,建议:将该定位点Point的速度和方向,一并上传;(需与服务端确认) 5、结束任务时,根据实际运动距离过程中所记录的非法速度次数是否达到某一特定值 (如100m超过5次)或平均速度超过了“运动速度阈值”,则有理由认为该次跑步存在刷公里嫌疑,建议不计入总公里。 说明:关于速度的进一步判断,可结合前面3个点的速度和时间,来综合判断,是否当前处于均速状态/加速状态/减速状态,从而判定新的定位点,是否合理。由于缺乏常规的加速/减速运动数据,暂不处理。
一组有关能源和太阳帆的物理习题
一组有关能源与太阳帆的物理习题(附答案) 卢宗长 1.一质量为M 的汽艇,在静水中航行时能达到的最大速度为10m/s 。假设航行时,汽艇的牵引力F 始终恒定不变,而且汽艇受到的阻力f 与其航速v 之间,始终满足关系:f=kv ,其中k =100N ·s/m ,求: (1)该汽艇的速度达到5m/s 的瞬时,汽艇受到的阻力为多大? (2)该汽艇的牵引力F 为多大? (3)若水被螺旋桨向后推出的速度为8m/s ,汽艇以最大速度匀速行驶时,在3秒钟之内,估算螺旋桨向后推出水的质量m 为多少? (提示:①推算水的质量时,可以将水的粘滞力忽略;②以上速度均以地面为参考系) 2. (08北京卷)风能将成为21世纪大规模开发的一种可再生清洁能源。风力发电机是将风能(气流的功能)转化为电能的装置,其主要部件包括风轮机、齿轮箱,发电机等。如图所示。 (1)利用总电阻10R =Ω的线路向外输送风力发电机产生的电能。输送功率0300kW P =,输电电压10kW U =,求异线上损失的功率与输送功率的比值; (2)风轮机叶片旋转所扫过的面积为风力发电机可接受风能的面积。设空气密度为p ,气流速度为v ,风轮机叶片长度为r 。求单位时间内流向风轮机的最大风能P m ;在风速和叶片数确定的情况下,要提高风轮机单位时间接受的风能,简述可采取的措施。 (3)已知风力发电机的输出电功率P 与P m 成正比。某风力发电机的风速v 19m/s 时能够输出电功率P 1=540kW 。我国某地区风速不低于v 2=6m/s 的时间每年约为5000小时,试估算这台风力发电机在该地区的最小年发电量是多少千瓦时。 3. (07北京卷)环保汽车将为2008年奥运会场馆服务。某辆以蓄电池为驱动能源的环 保汽车,总质量m =3×103 kg 。当它在水平路面上以v =36 km/h 的速度匀速行驶时,驱动 电机的输入电流I =50 A ,电压U =300 V 。在此行驶状态下 ⑴求驱动电机的输入功率P 电; ⑵若驱动电机能够将输入功率的90%转化为用于牵引汽车前进的机械功率P 机,求汽车所受 阻力与车重的比值(g 取10 m/s 2); ⑶设想改用太阳能电池给该车供电,其他条件不变,求所需的太阳能电池板的最小面积。结合计算结果,简述你对该设想的思考。
可展开太阳帆技术概述
可展开太阳帆技术概述 刘宇艳李学涛杜星文 太阳帆航行的构想和原理 太阳帆以太阳光光压为推进动力,是一种独特的推进方式,它超越了对反应物料的依赖。其工作原理是:利用太阳帆将照射过来的太阳光(光子)反射回去,由于力的作用是相互的,太阳帆在将光子“推”回去的同时,光子也会对太阳帆产生反作用力,从而推动飞船前进。装有太阳帆的航天器不需要火箭,也不需要燃料,只需展开一个仅有100个原子厚的巨型超薄航帆,即可从取之不尽的阳光中获得持续的推力飞向宇宙空间,而且只要几何形状和倾角适当,太阳帆可以飞向包括光源在内的任何方向。太阳帆扩大了太空行动的范围,使新的空间探测构想成为可能,而这些构想对于常规推进动力来说是根本不可能的。 我们知道,光是由没有静态质量但有动量的光子构成的,当光子撞击到光滑的平面上时,可以像从墙上反弹回来的乒乓球一样改变运动方向,并给撞击物体以相应的作用力。除了由入射光子传送到太阳帆上的动量之外,被反射的光子也在太阳帆上施加了反作用力。因此,通过将入射光子和反射光子产生的力相叠加,则作用在太阳帆上的总力几乎垂直指向它的表面。通过控制相对于太阳位置线的太阳帆方位,太阳帆可以获得或者释放轨道角动量。这样,太阳帆就能够向内或向外螺旋式上升穿越太阳系。 单个光子所产生的推力极其微小,在地球到太阳的距离上,光在1m2帆面上产生的推力还不到一只蚂蚁的重量。因此,为了最大限度地从阳光中获得加速度,太阳帆必须建得很大很轻,而且表面要十分光滑平整。对于一个典型的太阳帆来说,整个飞行器单位面积上的质量可以从20g/m2(近距离航行)到0.1 g/m2(远距离星际航行)。太阳帆不但要有较小的自身荷载,而且也要具备近乎完美的反射面,才能使转换到太阳帆上的动量几乎是入射光子所传送的动量的两倍。由于单个光子所传送的动量非常小,为了拦截大量的光子,太阳帆必须有一个大的表面积。如果太阳帆的直径为300m,其面积则为70686 m2,由光压获得的推力为340N。根据理论计算,这一推力可使重约0.5t的航天器在200多天内飞抵火星。若太阳帆的直径增至2000m,它获得的15000N推力就能把重约5t的航天器送到太阳系以外。由于来自太阳的光线提供了无尽的能源,携有大型太阳帆的航天器最终可以67km/s的速度前进。这个速度要比当今以火箭推进的航天器快4~6倍。 太阳帆航行研究的发展历史和现状 虽然太阳帆航行只是在近年来才被看作是一种实用的航天器推进方法,但是它的基本思想却由来已久。著名天文学家开普勒在400年前就曾设想不携带任何能源,仅仅依靠太阳光能就可使宇宙飞船驰骋太空。1873年,苏格兰物理学家麦克斯韦从理论上说明了光压的存在。1900年,俄罗斯的物理学家进行了准确的实验,测得了光压的存在。1924年,俄罗斯航天事业的先驱齐奥尔科夫斯其同事桑德明确提出了“用照射到很薄的巨大反射镜上的阳光所产生的推力获得宇宙速度”。正是桑德首先提出了太阳帆——包在硬质塑料上的超薄金属帆的设想,成为今天建造太阳帆的基础。 1973年,美国航宇局(NASA)出资资助巴特尔实验室进行太阳帆航行的初步研究。近
VERICUT使用说明书_轨迹优化
通过轨迹优化管理器建立轨迹优化库 本节是利用轨迹优化管理器OptiPath Manager优化加工材料为H13 tool steel (硬度大约为200 HB),并将优化的记录保存在轨迹优化库文件中,The following session (Optimize T ool Path Feedrates via OptiPath tool list method)demonstrates how to configure VERICUT for optimizing a G-code tool path file, including using the OptiPath Library created during this session. 操作步骤: 定义优化轨迹记录 1. 开始新的用户文件(英制) ?打开文件File > Properties ?单位Default Units=Inch, OK ?新建File > New Session 2. 使用轨迹优化管理器OptiPath Manager ?打开菜单OptiPath > Manager 根据刀具执行功能的不同来确定不同的优化设置。例如,刀具轨迹文件"op_mold.mcd"中用到的刀具: 刀具1 (T1): 描述: 直径0.625 4齿硬质合金平铣刀 用途: 深度小于0.5,转速小于1200 RPM 的平面铣削
刀具2 (T2): 描述:直径0.75 dia. 4 齿硬质合金球铣刀 用途: 外形半精铣削(仿行铣) 配置直径0.625平铣刀最优化设置: 3. 添加一个新的轨迹优化记录: 材料= H13 工具钢,机床=三轴铣床, 刀具类型=直径0.625,长1.50 硬质合金平铣刀齿数为4 ?点击添加Add ?点击材料标题"Material"下表格,键入:H13 T ool Steel ?在机床Machine下键入: 3ax Mill ?在刀具类型下T ool Description 键入:.625D 1.50H FEM, Carbide ?在齿数T eeth type下键入:4 ?点击优化轨迹刀具形状OptiPath Cutter Shape ?选择平铣刀 ?输入直径Diameter(D)=.625, 高度Height(H)=1.5 ?OK 4.为刀具配置已知的成功切削条件 ?轴向深度Axial Depth=.3 ?有效半径宽度Radial Width=.625 ?进给速率(/分)Feed Per Minute=8 ?主轴转速Spindle Speed=1200 在这种条件下,材料去除速率Volume Removal为每分钟1.5 立方英才cubic in. per minute. ?选择Volume Removal ?Clear Air Cut Feed Rate: "Default" ?改变默认空切削方式,输入空切削速度Air Cut Feed Rate=150 ?打开设置标签Settings T ab ?选择增加切削次数方式Add More Cuts ?改变4处默认的选项重新定义 ?最小转化速率Minimum Feedrate Change=3
【CN109850144A】一种太阳能扑翼仿生飞行器【专利】
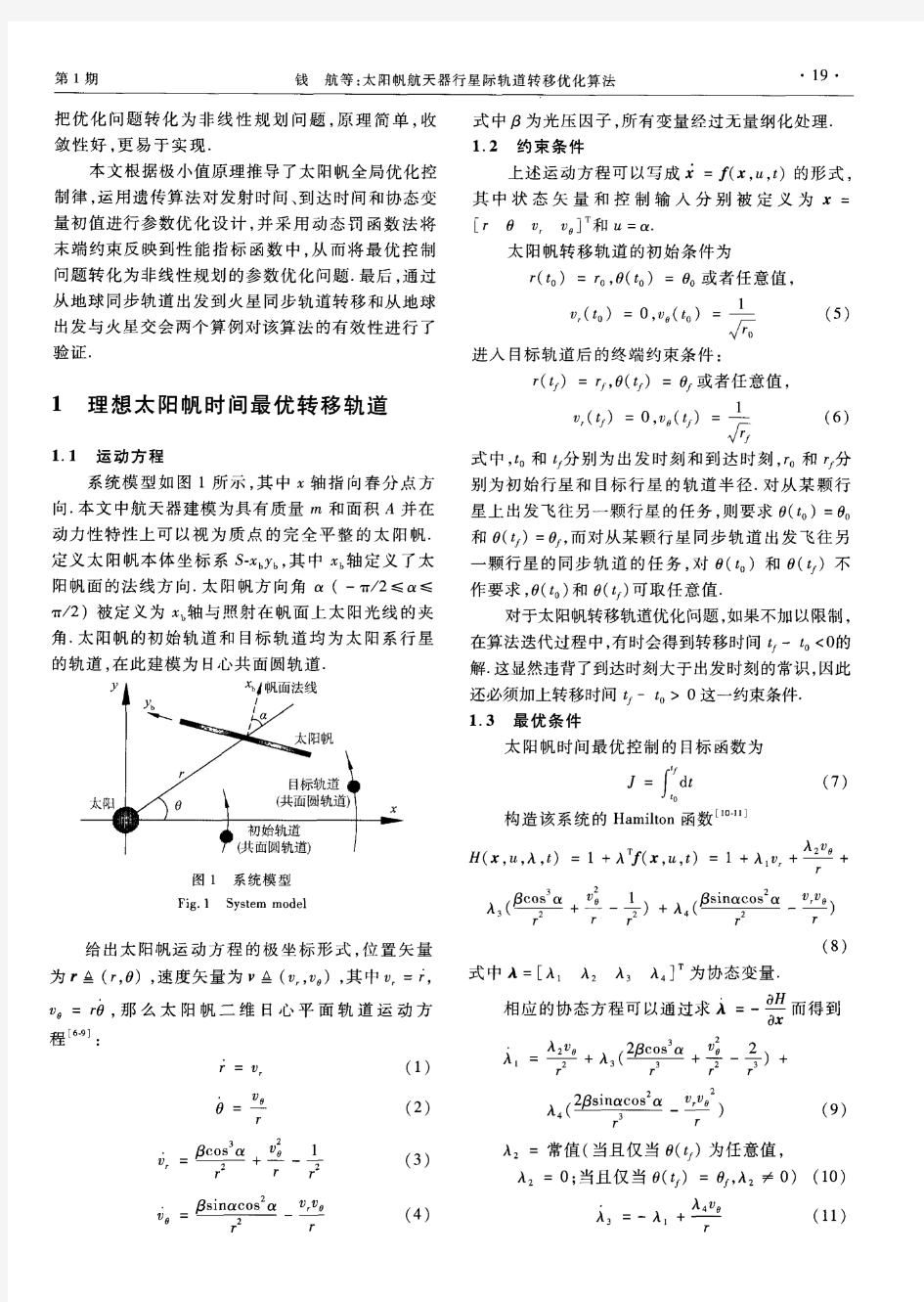
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910302505.6 (22)申请日 2019.04.16 (71)申请人 吉林大学 地址 130012 吉林省长春市前进大街2699 号 (72)发明人 张志君 陈默 杨贺捷 梁玉辉 辛相锦 (74)专利代理机构 长春吉大专利代理有限责任 公司 22201 代理人 邵铭康 朱世林 (51)Int.Cl. B64C 33/00(2006.01) B64C 33/02(2006.01) B64D 27/24(2006.01) (54)发明名称 一种太阳能扑翼仿生飞行器 (57)摘要 一种太阳能扑翼仿生飞行器属飞行器技术 领域,本发明中扑翼飞行器采用微型直流电机与 二级齿轮减速器的连接来驱动扑翼结构;仿生扑 翼太阳能薄膜翼板提供了铺放柔性薄膜太阳能 电池板的空间;扑翼飞行器尾翼由两个舵机分别 驱动曲柄转动,带动连杆摆动以实现尾翼的上 下、左右四个方向的转动。本发明能实现扑翼飞 行器的节能、高效、可持续,同时鸟类翅膀、尾翼 的结构及运动方式,在本发明的仿生扑翼飞行运 动得以体现,具有结构新颖、传动机构简单可靠、 能源可再生的优点。权利要求书2页 说明书5页 附图9页CN 109850144 A 2019.06.07 C N 109850144 A
权 利 要 求 书1/2页CN 109850144 A 1.一种太阳能扑翼仿生飞行器,其特征在于:由太阳能薄膜右翼板(A)、驱动-传动装置 (B)、太阳能薄膜左翼板(C)和仿生尾翼(D)组成,其中:所述的太阳能薄膜右翼板(A)和太阳能薄膜左翼板(C)为关于机身a-a中轴线的对称结构;太阳能薄膜右翼板(A)中右连杆(2)的a孔(a)与驱动-传动装置(B)中限位杆对a(15)上的i孔(i)和摇臂a(12)上的n孔(n)活动连接;右连杆(2)的b孔(b)经螺栓与摇臂对a(12)上的m孔(m)固接;太阳能薄膜左翼板(C)中左连杆(3)的a1孔(a1)与驱动-传动装置(B)中限位杆对b(36)上的i1孔(i1)和摇臂对b(35)上的n1孔(n1)活动连接;左连杆(3)的b1孔(b1)经螺栓与摇臂对b(35)上的m1孔(m1)固接;仿生尾翼(D)铰接于机身(1)的后端;仿生尾翼(D)中机身(1)的q槽(q)、r槽(r)、s槽(s)经o孔(o)与驱动-传动装置(B)的固定架(20)固接;驱动-传动装置(B)的太阳能充电控制器(32)和蓄电池(33)与侧机架(18)固接;太阳能充电控制器(32)与太阳能薄膜右翼板(A)和太阳能薄膜左翼板(C)的太阳能电池板(4)电路连接,蓄电池(33)一端连接太阳能充电控制器(32),蓄电池(33)另一端连接驱动-传动装置(B)的无刷电机(7)。 2.按权利要求1所述的一种太阳能扑翼仿生飞行器,其特征在于:所述的太阳能薄膜右翼板(A)与太阳能薄膜左翼板(C)为关于机身a-a中轴线的对称结构,其结构相同,方向相反,均由太阳能电池板(4)、翼板(5)、骨架(6)组成,其中骨架(6)上设有p孔(p);太阳能薄膜右翼板(A)上还设有右连杆(2),右连杆(2)左端设有a孔(a)和b孔(b);太阳能薄膜左翼板(C)上还设有左连杆(3),左连杆(3)右端设有a1孔(a1)和b1孔(b1);太阳能薄膜左翼板(C)的骨架(6)经p孔(p)与左连杆(3)固接,翼板(5)由骨架(6)支撑;太阳能电池板(4)粘接于翼板(5)上面;太阳能薄膜右翼板(A)的骨架经p孔与右连杆(2)固接,翼板由骨架支撑;太阳能电池板粘接于翼板上面。 3.按权利要求1所述的一种太阳能扑翼仿生飞行器,其特征在于:所述的驱动-传动装置(B)由无刷电机(7)、右机架(8)、一级小齿轮(9)、一级大齿轮(10)、二级小齿轮a(11)、摇臂对a(12)、轭a(13)、驱动杆对a(14)、限位杆对a(15)、二级大齿轮a(16)、螺栓组a(17)、侧机架(18)、二级小齿轮b(19)、固定架(20)、左机架(21)、一级轴(22)、二级轴(23)、二级大齿轮b(24)、轭b(34)、摇臂对b(35)、限位杆对b(36)、驱动杆b(37)和螺栓组b(38)组成,其中:右机架(8)与左机架(21)为关于机身a-a中轴线的对称结构;右机架(8)上设有c孔(c)、d孔(d)、e孔(e)、f孔(f)、g孔(g)和h孔(h);左机架(21)上设有c1孔(c1)、d1孔(d1)、e1孔(e1)、f1孔(f1)、g1孔(g1)和h1孔(h1);限位杆对a(15)上设有i孔(i);摇臂对a(12)上设有j孔(j)、k孔(k)、m孔(m)和n孔(n);限位杆对b(36)上设有i1孔(i1);摇臂对b(35)上设有j1孔(j1)、k1孔(k1)、m1孔(m1)和n1孔(n1);固定架(20)上设有o孔(o);右机架(8)与左机架(21)平行排列,并经侧机架(18)固接;无刷电机(7)经c孔(c)、d孔(d)、e孔(e)、f孔(f)与右机架(8)螺栓固接;无刷电机(7)经c1孔(c1)、d1孔(d1)、e1孔(e1)、f1孔(f1)与左机架(21)螺栓固接;一级小齿轮(9)固接于无刷电机(7)输出端;一级轴(22)与二级轴(23)平行排布;一级轴(22)上自右至左依次固接二级小齿轮a(11)、一级大齿轮(10)和二级小齿轮b(19),且一级轴(22)两端活动连接于右机架(8)的g孔(g)和左机架(21)的g1孔(g1)上;二级轴(23)上前后固定安装着二级大齿轮a(16)和二级大齿轮b(24),且二级轴(23)两端活动连接于右机架(8)的h孔(h)和左机架(21)的h1孔(h1)上;一级小齿轮(9)与一级大齿轮(10)啮合;二级小齿轮a(11)与二级大齿轮a(16)啮合;二级小齿轮b(19)与二级大齿轮b(24)啮合;限位杆对a(15)固接于右机架(8)右侧;摇臂对a(12)上的n孔(n)经销轴与连杆(1)的a孔(a)、限位 2
太阳帆自旋展开动力学地面模拟试验研究
第28卷第2期2015年4月 振一动一工一程一学一报 Journal of Vibration En g ineerin g Vol.28No.2 A p r.2015 太阳帆自旋展开动力学地面模拟试验研究 周晓俊,周春燕,张新兴,胡海岩 (北京理工大学宇航学院飞行器动力学与控制教育部重点实验室,北京100081) 摘要:太阳帆自旋展开是一项新的空间技术三它利用自旋离心力展开折叠的太阳帆薄膜,并使其保持展开后的位形,从而可省略额外支撑结构,有效减少结构重量,降低展开能耗三在这项技术进行在轨试验和用于航天任务之前,必须对其进行充分的动力学地面模拟试验三介绍了如何设计和研制太阳帆自旋展开与控制系统,制作了不同的太阳帆模型,分别在常规气压下和真空舱中进行太阳帆自旋展开动力学地面模拟试验三通过多组试验,得到了可完整二稳定展开太阳帆模型的方法三试验时在真空舱底部和侧面布置两台高速相机,拍摄各个时段的展开过程三经过图像处理和分析,得到了第一展开阶段帆面展开长度随时间的变化关系和第二展开阶段的帆面动态响应三通过建立简化的动力学模型并进行分析,解释了第二展开阶段帆面产生较大面内外振动的原因三 关键词:航天器;地面模拟试验;太阳帆;展开;自旋 中图分类号:V416.6一一文献标志码:A一一文章编号:1004-4523(2015)02-0175-08 DOI:10.16385/https://www.360docs.net/doc/5e1652645.html,ki.issn.1004-4523.2015.02.001 引一言 进入21世纪以来,人类的深空探测活动范围不断扩大,类型趋向多样化,对新型推进技术的需求也日益增加三太阳帆飞行器利用太阳光的光压实现推进,无需携带附加燃料,可使经济便捷的深空探测梦想成为可能[1~3]三因此世界各国航天机构,包括俄罗斯巴巴金空间研究中心二俄罗斯空间研究所二美国国家航空航天局(NASA)二欧洲航天局(ESA)二德国航空航天所(DLA)和日本宇宙航空研究开发机构(JAXA)等都开展了太阳帆研究三1993年,俄罗斯在经过长期理论研究以及地面模拟试验之后,成功研制出直径为20m的Znan y a-2号空间反射镜[4],但接下来进行的直径为25m的Znan y a-2.5号展开试验却失败了三欧洲空间局和德国宇航研究院合作,于1999年研制出20m?20m的太阳帆模型,并成功进行了地面展开模拟试验[5]三2001年,美国行星协会发射了 宇宙1号 航天器[6]三这是在世界上首次使用太阳帆推进技术的航天飞行器,此后美国又有若干这方面的计划,但要么失败了,要么尚未实施[7]三令人可喜的是,2010年日本JAXA成功发射了伊卡洛斯号(IKAROS)太阳帆航天器[8],验证了太阳帆推进技术三 中国在太阳帆航天器研究方面起步较晚,但近年来日益重视三中国航天科技集团二北京航空航天大学二哈尔滨工业大学二清华大学二中国科学院空间科学与应用研究中心等单位就太阳帆航天器的轨道控制,姿态控制问题等进行了若干理论和计算研究[9~13]三 太阳帆推进技术的关键之一是如何在太空中展开大型太阳帆并保持其展开后的形面三为了降低结构重量,人们提出了自旋展开技术,依靠太阳帆角点上的集中质量产生离心力,实现帆面展开和形面保持三太阳帆自旋展开技术在结构动力学与控制方面具有以下难点:太阳帆薄膜在自旋展开中会产生位于自旋平面内二外的振动,若控制不恰当,很容易使薄膜发生危险的面外运动,导致展开过程彻底失败三作者所在实验室建立了太阳帆薄膜结构的多柔体动力学模型,计算了自旋展开动力学问题[14,15]三本文则介绍如何依据自旋展开原理,设计缩比的太阳帆模型二自旋展开装置等,并通过地面模拟试验对太阳帆自旋展开过程的动力学特性进行研究,试图为理论建模和数值模拟提供试验验证,进而为中国太阳 收稿日期:2013-12-18;修订日期:2014-06-27 基金项目:国家自然科学基金资助项目(51075032,11290150)
《太阳能飞机》初中说明文阅读题及答案
①近日,一架来自瑞士的奇怪飞机引起了国人的持续关注。这架名为“阳光动力”2号的飞机,其翼展达72米,但重量仅有2.3吨,狭小的机舱只能容纳一名飞行员。单看这些数据指标,“阳光动力”2号简直不值一提,但这架飞机却有个绝活――不需要传统燃料,因为它是一架太阳能飞机。②太阳能飞机是以太阳辐射的光能为动力的飞机。与常规飞行器相比,太阳能飞机由于不需传统的石化燃料,因此具有自己独特的优势。它通常在白天爬升至平流层20千米至30千米的高度,将太阳能最大限度地转存到储能电池中,夜晚则逐渐降至15千米至18千米的高度,低速、半滑翔飞行。太阳能飞机源源不断的动力,使它一次飞行可长达数月乃至数年。同时,由于太阳能飞机以太阳能为动力,故其燃油、维护和维修费用基本为零。③为获得较高升力,以便在高空持续飞行,太阳能飞机在设计上通常采用大展弦比机翼,因此我们看到的太阳能飞机都会有一个巨大的机翼。这样设计,使太阳能飞机具备了很高的升阻比。目前,各国研制的太阳能飞机的升阻比普遍达到30至40左右,而常规飞机中升阻比最高的美国“全球鹰”无人机,升阻比也仅达到30左右。④与常规飞机使用的航空燃油相比,太阳能提供的能量却十分有限。以“阳光动力”2号飞机为例,其机身太阳能电池面积达270平方米,但全部功率只有50千瓦左右,仅相当于一辆排气量为1.0升的小汽车。同时,在现有技术条件下,太阳能电池的能量转化率还比较低。“阳光动力”2号飞机上使用的单晶硅太阳能电池,在国际上属于领先产品,厚度只有135微米,相当于人类的一根头发,其能量转化率仅有23%。在经过太阳能电池、储能电池、电机等能量传递环节的消耗后,实际传递给螺旋桨的能量达到20%就不错了。由于这些限制,太阳能飞机的巡航速度普遍较慢,一般只能达到每小时几十公里。⑤任何新技术的实用化都充满了无穷潜力,太阳能飞机也是如此。我们相信,只要在未来突破制约其发展的一些技术障碍,这种新能源飞行器必然会在应用中大放异彩。(摘自《世界军事》,有改动)11.请简要概括太阳能飞机的主要特点。(3分)答: ______ 12.导致太阳能飞机巡航速度普遍较慢的原因主要有哪些?(3分)答: ______ 13.第③段主要运用了什么说明方法?有何作用?(3分)答:______ 14.请分析第④段加点词“只有”的表达效果。(3分)答:
《太阳能飞机》阅读附答案
《太阳能飞机》阅读附答案 《太阳能飞机》 ①近日,一架来自瑞士的奇怪飞机引起了国人的持续关注。这架名为“阳光动力”2号的飞机,其翼展达72米,但重量仅有2.3吨,狭小的机舱只能容纳一名飞行员。单看这些数据指标,“阳光动力”2号简直不值一提,但这架飞机却有个绝活――不需要传统燃料,因为它是一架太阳能飞机。 ②太阳能飞机是以太阳辐射的光能为动力的飞机。与常规飞行器相比,太阳能飞机由于不需传统的石化燃料,因此具有自己独特的优势。它通常在白天爬升至平流层20千米至30千米的高度,将太阳能最大限度地转存到储能电池中,夜晚则逐渐降至15千米至18千米的高度,低速、半滑翔飞行。太阳能飞机源源不断的动力,使它一次飞行可长达数月乃至数年。同时,由于太阳能飞机以太阳能为动力,故其燃油、维护和维修费用基本为零。 ③为获得较高升力,以便在高空持续飞行,太阳能飞机在设计上通常采用大展弦比机翼,因此我们看到的太阳能飞机都会有一个巨大的机翼。这样设计,使太阳能飞机具备了很高的升阻比。目前,各国研制的太阳能飞机的升阻比普遍达到30至40左右,而常规飞机中升阻比最高的美国“全球鹰”无人机,升阻比也仅达到30左右。 ④与常规飞机使用的航空燃油相比,太阳能提供的能量却十分有限。以“阳光动力”2号飞机为例,其机身太阳能电池面积达270平方米,但全部功率只有50千瓦左右,仅相当于一辆排气量为1.0升的小汽车。同时,在现有技术条件下,太阳能电池的能量转化率还比较低。“阳光动力”2号飞机上使用的单晶硅太阳能电池,在国际上属于领先产品,厚度只有135微米,相当于人类的一根头发,其能量转化率仅有23%。在经过太阳能电池、储能电池、电机等能量传递环节的消耗后,实际传递给螺旋桨的能量达到20%就不错了。由于这些限制,太阳能飞机的巡航速度普遍较慢,一般只能达到每小时几十公里。 ⑤任何新技术的实用化都充满了无穷潜力,太阳能飞机也是如此。我们相信,只要在未来突破制约其发展的一些技术障碍,这种新能源飞行器必然会在应用中大放异彩。 (摘自《世界军事》,有改动) 11.请简要概括太阳能飞机的主要特点。(3分) 答:___________ 12.导致太阳能飞机巡航速度普遍较慢的原因主要有哪些?(3分) 答:___________ 13.第③段主要运用了什么说明方法?有何作用?(3分) 答:___________ 14.请分析第④段加点词“只有”的表达效果。(3分) 答:___________ 参考答案 11.(3分)①翼展大、重量轻、空间小;②持续飞行时间长;③燃油、维护和维修成本低;④巡航速度普遍较慢。(每点1分,任意三点即可) 12.(3分)①太阳能提供的能量十分有限;②太阳能电池的能量转化率还比
[航天器,三维动画,太阳]太阳帆航天器三维动画可视化仿真平台的设计与实现
太阳帆航天器三维动画可视化仿真平台的设计与实现 0 引言 太阳帆航天器是一种在深空探测和星际航行等领域极具潜力的新型航天器,利用太阳光压产生持续推力,给航天器提供持续动力,本身无需携带大量的燃料,因此在深空探测和星际航行等航天领域具有广阔的应用前景,近年来受到国际航天界的广泛关注。 美国宇航局(NASA)、日本宇航局(JAXA)、欧洲航天局(ESA)等多个世界研究机构正在研制利用太阳帆航天器进行推进任务(如Pole Site、Geosail、Geostorm等),但是,离利用太阳帆进行深空探测及星际航行还有一定的距离,还有一系列的关键技术需要攻克。针对太阳帆航天器进行一次太空航行任务,需要高额的成本,本文提供了一种经济且有效的方式,研究并开发了一套三维可视化仿真平台,利用仿真平台模拟太阳帆航天器的飞行情况,为实际太阳帆航天器飞行提供一定的参考。 截止目前,未发现有关太阳帆航天器可视化仿真平台的文献。本文利用C++6.0、Multigen Creator/Vega、及MATLAB等软件相结合搭建了一个太阳帆三维动画可视化仿真平台。利用视点控制及多通道多视点技术分别在不同的通道中观察太阳帆的飞行轨迹及姿态变化;通过VC++与MATLAB的交互编程,利用MAT文件的仿真数据驱动多个物体同时移动;利用Vega和OpenGL混合编程,实现了飞行轨迹及姿态信息实时显示的功能。 1 太阳帆航天器三维动画可视化仿真平台总体设计 三维动画可视化仿真系统主要由太空飞行仿真场景及视景仿真模型两大部分构成。飞行仿真场景是指太阳帆所飞行的具体环境;视景仿真模型是指太阳帆航天器的具体结构模型。 本文首先利用Creator建立太空环境飞行仿真场景(太空环境)和太阳帆航天器的结构视景仿真模型(flt文件);接着利采用Vega提供的Lynx工具将flt文件导入相应的场景中,然后,进行一系列的初始化工作,并将其储存为应用程序定义文件(ADF)文件;最后,通过MATLAB 计算各个时刻太阳帆的飞行轨迹和姿态数据,并通过载入模型对象的位置及姿态数据,完成对太阳帆的飞行轨迹和姿态变化的三维可视化仿真。 2 仿真软件平台环境和开发中的关键技术 2.1 在Visual C++环境下Vega应用程序的开发 Windows平台上Vega应用程序的开发,利用MFC框架开发程序能够有效地应用Vega函数库,可以极大程度地减小程序开发的工作量。本文采用基于MFC开发Vega应用程序。 2.2 三维动画场景和模型的建立 Multigen Creator是一款专业化的建模软件工具,可以有效地创建交互式实时应用的三维模型及场景。本文利用Creator建立太空环境模型和太阳帆航天器的结构模型。太阳帆航天器的结构主要包括大面积帆膜、支撑机构及中心控制机构等其它附属机构,模型的正面视
GPS轨迹优化算法
G P S轨迹优化算法 公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
运动公会:GPS轨迹优化算法 当前问题描述: 1、定位精度:控制在<50m,而非根据具体场景(机型、场地)实时控制; 2、首点(即轨迹第一个点)存在漂移现象; 3、防作弊机制放在了服务端,导致用户跑步下来,看到的跑步数据与提交后服务端处理 后的数据,不一致; 定位点(LocationPoint)的数据解析: GPS信号强度:signalLevel;(good/bad/unknown) 定位精度:accuracy;(m) 经纬度:位置点 时间:ms(毫秒)客户端计算 方向:bearing;(度) 速度:speed;(m/s) 当前跑步轨迹定位点,只使用了前四个数据(GPS信号、定位精度、经纬度、时间); 而进一步,利用“方向”可进一步确定是否“拐点”;利用“速度”可进一步判断运动状态(相对静止、运动中(相对均速、相对加速、相对减速))。 走路 普通人5km/h 或1~2m/s体质较弱3km/h 或<1m/s 跑步 普通人均速:10km/h 受过训练 均速:20~30km/h 高速:8~9m/s高速:10m/s 解决思路: 定位精度问题 思路一: 取一定数量的定位点,根据这些点的精度分布情况,确定精度最大阈值; 理论上可行,但跑步过程中,周边场地情况发生实时变化,之前确定的最大阈值是否足够合理,值得商榷; 思路二: 1、在不同的地点(居民区、商业区、空旷地带),去采集定位点的精度,根 据这些精度的反馈,确定一阈值; 2、在运动过程中,将用户设备的精度数据(设备类型+android版本+精度) 实时上传服务器,后期根据服务器保存的精度数据,看情况是否调整之前确定的精度阈值; 首点确认问题
轨迹规划分类及算法
路径规划的分类: 一、按路径维数 根据医学影像设备的不同,穿刺手术可以分二维和三维影像导航手术。所以根据应用场合的不同,路径规划也可分为二维路径规划和三维路径规划。 二维路径规划主要应用在超声、CT、X 射线等设备的导航手术中,三维路径规划则主要应用在三维超声、MRI 等设备的导航手术中。 二、按路径形式 根据穿刺路径特点,路径规划又可按照路径形式的不同分为: R 型、S 型、H 型和混合型,即整个路径包含两种以上不同路径形式组合。 三、按规划方向 由路径形式可以看出路径是可逆的,即理论上针可以从目标靶点沿原路返回穿刺至入针点。所以根据路径规划方向可分为正向规划和逆向规划。正向规划即从入针点到目标靶点的穿刺规划,逆向规划是利用针路的可逆性,从目标靶点出发穿刺可以选择的入针区域,来优化入针位姿和整个路径。 四、按规划算法 路径规划按算法大体可分为数值法、搜索法和反解法三大类。 五、算法概述 (一)数值法是通过数值计算的方法来优化路径,通常是利用目标函数的最大或最小值来得到最优路径的方 法。 1)概率法是考虑路径误差的随机性,利用数学概率原理计算穿刺成功率最大的路径。 2)目标函数法是考虑一些优化的指标(如路径最短,绕开障碍物等),建立目标函数,通过计算目 标函数得到最优解。 (二)搜索法是根据路径形式特点,利用计算机的人工智能搜索算法来搜索可行性路径。 1)路线图法主要思想是将自由空间转换成为一维线段所组成的网络,所要找的路径被局限在这个 网络之中,即将路径规划问题转化成图的搜索问题。 i.可视图法是由麻省理工学院的Tomás Lozano-Pérez和IBM研究院的MichaelA.Wesley 于1979年提出的。其最大特点是将障碍物用多边形包围盒来表达。图1表示某一环境 空间,s、g分别称为起始点和目标点。O1和O2表示两个障碍物。图2是构造出的对 应图1的可视图。利用搜索算法规划出从起始点至目标点的最优路径。
晶体硅电池在太阳能飞行器上的选择与应用
晶体硅电池在太阳能飞行器上的选择与应用作者:王士元 来源:《航空模型》2011年第08期 九.结合晶体硅电池的安装特点进行太阳能飞行器的整体结构设计 一款飞行器在确定了初步设计方案后,就要进行整体结构设计。太阳能飞行器也不例外,但应结合晶体硅电池的安装特点做整体结构设计。 首先应进行选择与分析,确定飞行器是采用完全以晶体硅电池为动力和控制系统的电力来源,还是以其作为辅助充电部件。接下来确定合适的飞行器布局方案。纵观世界各国的太阳能飞行器,基本都采用大展弦比机翼(图17),甚至直接采用飞翼。这类布局的飞行器除具有良好的气动性能外,还能承载大面积晶体硅电池。但电池及其封装材料的相对重量较大,会增加飞行器的翼载荷。为此,可利用晶体硅电池及其封装材料作机翼上缘的蒙皮,以减小结构重量。另外,为增加晶体硅电池的有效面积,有些飞行器的机身、平尾等部位也加装了电池(图18、图19)。最后,还要考虑飞行器的起飞、回收方式及新材料、新技术的应用等很多内容。 十. 晶体硅电池封装前的加工 确定了太阳能飞行器的初步结构设计方案,晶体硅电池的安装敷设方案一般也会相应确定,然后可据此进行电池的封装。封装前,首先要进行必要的加工,基本步骤有功率设计、电池片切割、分选、串并联与汇流焊接等。 1.晶体硅电池的功率设计 晶体硅电池的发电功率是指在太阳能飞行器上经封装完成的电池组件的发电峰值功率。太阳能发电功率量值取决于晶体硅电池的光电转换效率、平均每天日照时数和飞行器飞行区域的季节、经纬度等因素,另外遇阵云等天气状况也会对电池组件发电效率造成的影响。设计时应综合考虑这些因素,计算出电池组件的最大发电功率。 2.电池片的切割 晶体硅电池生产厂家向用户提供的都是标准的电池原片(图20)。为满足负载设备对电流、电压的要求,适应电池安装形式(面积、形状等),应根据设计的电池片的功率用激光进行切割。切割出的各小块电池片与电池原片一般均为独立的发电单元,其输出电压都是0.5V 左右,但输出电流与功率则有很大差异。例如一片尺寸为156mm×156mm的高效独立晶体硅电池原片,其输出电流为80mA、峰值功率为4.2W。经切割后,小块电池片的输出电流与功率根据其面积按比例减小。
GPS轨迹优化算法
G P S轨迹优化算法 公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
运动公会:G P S轨迹优化算法当前问题描述: 1、定位精度:控制在<50m,而非根据具体场景(机型、场地)实时控制; 2、首点(即轨迹第一个点)存在漂移现象; 3、防作弊机制放在了服务端,导致用户跑步下来,看到的跑步数据与提 交后服务端处理后的数据,不一致; 定位点(LocationPoint)的数据解析: GPS信号强度:signalLevel;(good/bad/unknown) 定位精度:accuracy;(m) 经纬度:位置点 时间:ms(毫秒)客户端计算 方向:bearing;(度) 速度:speed;(m/s) 当前跑步轨迹定位点,只使用了前四个数据(GPS信号、定位精度、经纬度、时间); 而进一步,利用“方向”可进一步确定是否“拐点”;利用“速度”可进一步判断运动状态(相对静止、运动中(相对均速、相对加速、相对减速))。 常规运动速度数据: 走路 普通人5km/h 或 1~2m/s 体质较 弱 3km/h 或 <1m/s 跑步 普通人均速:10km/h 受过训 练 均速: 20~30km/h
高速:8~9m/s高速:10m/s 解决思路: 定位精度问题 思路一: 取一定数量的定位点,根据这些点的精度分布情况,确定精度最大阈值; 理论上可行,但跑步过程中,周边场地情况发生实时变化,之前确定的最大阈值是否足够合理,值得商榷; 思路二: 1、在不同的地点(居民区、商业区、空旷地带),去采集定位点的精 度,根据这些精度的反馈,确定一阈值; 2、在运动过程中,将用户设备的精度数据(设备类型+android版本+ 精度)实时上传服务器,后期根据服务器保存的精度数据,看情况是否调整之前确定的精度阈值; 首点确认问题 连续三个点为非拐点且三个点均合法,则第一个点为首点,否则去掉第一个点,继续下面三个点进行下一步计算,直到找到首点。 首点合法的依据: 1、三个点在精度阈值范围内; 2、三个点的方向相对一致,即不存在拐点; 3、根据点与点之间的距离和时间间隔,计算其运行速度,该速度在 合理的跑步速度范围之内; 4、连续三个点,满足以上条件,则第一个点为首点;
太阳能无人机 神秘的太阳能无人机
在古希腊神话中,有这样一个故事伊洛卡斯父子在战争中被打败,为了逃跑,他们用绳子和蜡将羽毛固定在胳膊上,然后朝着太阳的方向飞去,在接近太阳时,因蜡被融化,羽毛脱落,坠海而死。伊洛卡斯父子懂得模仿鸟儿飞翔,但没有想到高温会将蜡融化,使羽毛脱落。如今真的出现了能朝着太阳飞,而且必须依靠阳光才能飞行的飞行器――美国航空航天局(NASA)正在秘密研制的太阳能无人机,它用现代复合材料代替了蜡,用复杂的结构代替了鸟翼,可长时间地遨翔在万里蓝天。下面我们就来看一看这种神秘的太阳能无人机的近况、相关技术、主要型号及其用途。 NASA对太阳能无人机的研究 用太阳能作为飞机的能源,这种想法由来已久,也有人尝试过,但真正开始进行型号研制并取得进展却是近年来的事。美国航空航天局(NASA)经过多年的研究之后,提出了一个称为ERAST(即环境研究飞机和传感器技术)的计划,实际上就是美国的发展太阳能无人驾驶飞机计划。这个计划一直在秘密实施,直到近来才先后向外界透露了一些情况。 据介绍,目前这项计划进展得比较顺利,已经有四种型号的太阳能无人机样机先后问世。最早的型号是“探索者”(Pathfinder),其后是称为“探索者+”(PathfinderPlus)的改进型,第三种型号叫“百人队长”(Centurion),最新的型号是“太阳神”(Helios)。 这四种型号的太阳能无人机,都是位于加里福尼亚州的大气环境公司所制造,并且先后开始试飞。在试飞中,它们曾创造了两个方面的记录一是首次实现了太阳能动力飞行;二是创造了螺旋桨无人机飞行高度达到20000米以上。这两项记录的每一项都意味着太阳能无人机向成功和实用迈出了非常重要的一步。特别是实现了太阳能动力飞行,标志着这种飞行器长时间、长距离的不着陆飞行将成为可能。在理论上,只要不出现机件损坏,它的续航时间和航程都是无限的。 最先打破这两项记录的是“探索者”太阳能无人机。它不但成功地使用了太阳能作为飞机的动力能源,而且能在20000米以上的高空正常使用。在此之前,飞行高度达到20000米以上仍能保持正常飞行的只有为数不多的几种飞机,其中包括美国的U-2高空侦察机、前苏联的M-55高空侦察机、美国的SR-71侦察机和最近因失事而全部停飞的法英合作研制的“协和”号运输机。况且这些都是喷气式飞机,而螺旋桨飞机至今无人企及。这主要是因为在这个高度上空气比较稀薄,只相当于火星表面的空气条件,飞机长时间飞行很困难,也很危险。飞行员要穿着性能非常可靠的抗荷服,发动机要有良好的高空工作性能,螺旋桨要有在高空使用的能力。对于太阳能无人机来说,由于无人驾驶,因此无须考虑飞行员的生存和工作条件。 要想使飞机能在20000米以上的高空条件下飞行,必须提供足够的升力。解决这个问题,对于低速飞机来说通常的办法是选择合适的翼型、加长翼展、加大机翼面积,以尽可能地增大飞机的升力,同时也要千方百计地减轻飞机重量。因此,我们从本文的插图中可以看到,这些太阳能无人机的翼展都很长,翼面积非常大,而且主要是采用比较轻的新型材料制作的。 现在研制的几种太阳能无人机的翼载荷都很小,如“太阳神”太阳能无人机,其翼载荷还不到3公斤/平方米。为了作到这一点,生产厂家不得不在机翼上全部采用新型的复合材料,如卡夫拉、碳纤维、奥美丝等,以及用优质的胶卷膜片作为机翼蒙皮。这样的机翼,不但重