最优化原理与方法
北航最优化方法大作业参考
北航最优化方法大作业参考
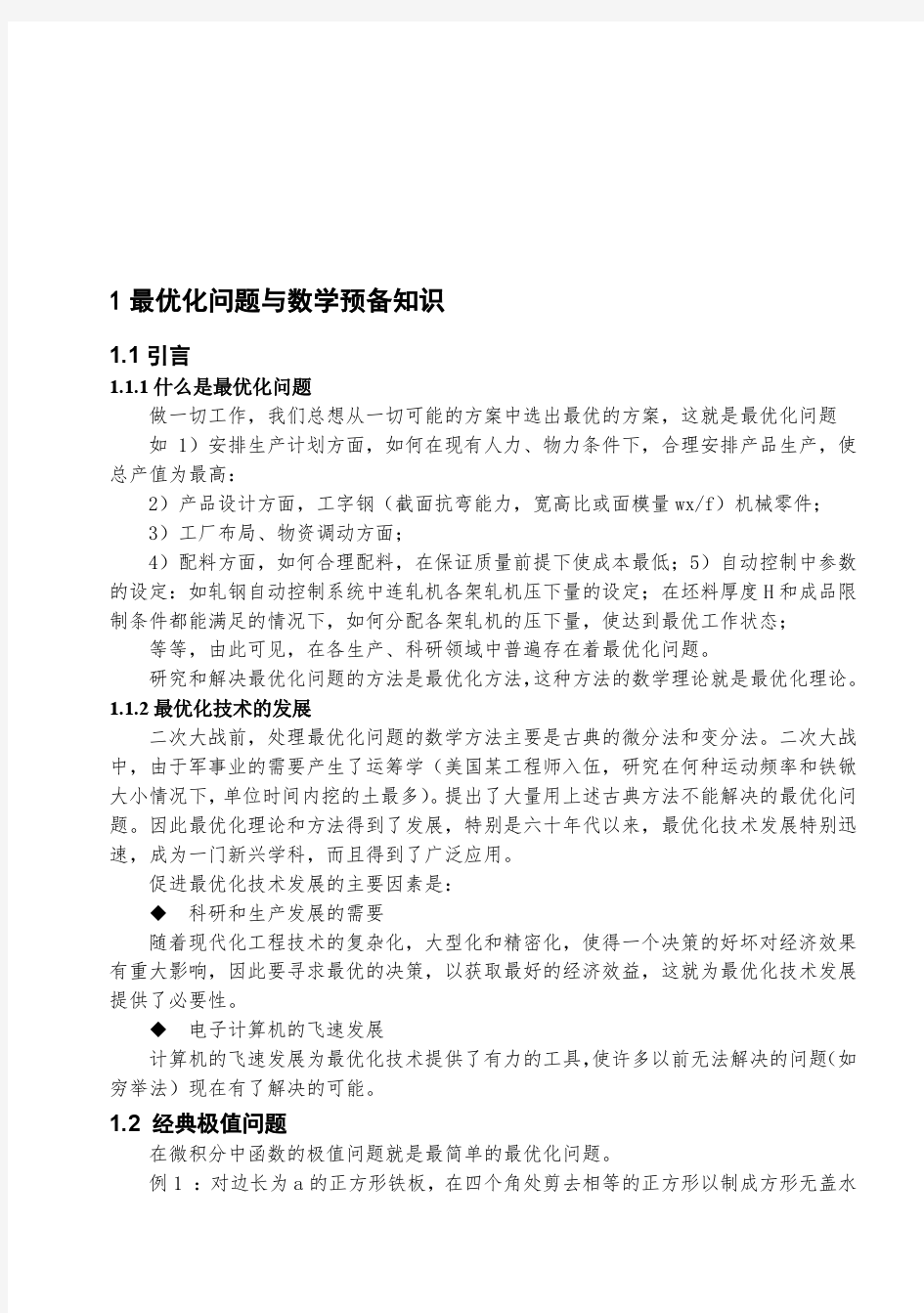
1 流量工程问题 1.1 问题重述 定义一个有向网络G=(N,E),其中N是节点集,E是弧集。令A是网络G的点弧关联矩阵,即N×E阶矩阵,且第l列与弧里(I,j)对应,仅第i行元素为1,第j行元素为-1,其余元素为0。再令b m=(b m1,…,b mN)T,f m=(f m1,…,f mE)T,则可将等式约束表示成: Af m=b m 本算例为一经典TE算例。算例网络有7个节点和13条弧,每条弧的容量是5个单位。此外有四个需求量均为4个单位的源一目的对,具体的源节点、目的节点信息如图所示。这里为了简单,省区了未用到的弧。此外,弧上的数字表示弧的编号。此时,c=((5,5…,5)1 )T, ×13 根据上述四个约束条件,分别求得四个情况下的最优决策变量x=((x12,x13,…,x75)1× )。 13 图 1 网络拓扑和流量需求
1.2 7节点算例求解 1.2.1 算例1(b1=[4;-4;0;0;0;0;0]T) 转化为线性规划问题: Minimize c T x1 Subject to Ax1=b1 x1>=0 利用Matlab编写对偶单纯形法程序,可求得: 最优解为x1*=[4 0 0 0 0 0 0 0 0 0 0 0 0]T 对应的最优值c T x1=20 1.2.2 算例2(b2=[4;0;-4;0;0;0;0]T) Minimize c T x2 Subject to Ax2=b2 X2>=0 利用Matlab编写对偶单纯形法程序,可求得: 最优解为x2*=[0 4 0 0 0 0 0 0 0 0 0 0 0]T 对应的最优值c T x2=20 1.2.3 算例3(b3=[0;-4;4;0;0;0;0]T) Minimize c T x3 Subject to Ax3=b3 X3>=0 利用Matlab编写对偶单纯形法程序,可求得: 最优解为x3*=[4 0 0 0 4 0 0 0 0 0 0 0 0]T 对应的最优值c T x3=40
最优化理论与方法
课程报告题目最优化理论与方法 学生姓名 学号 院系 专业 二O一二年十一月十日
最优化理论与方法综述 最优化方法是近几十年形成的,它主要运用数学方法研究各种系统的优化途径及方案,为决策者提供科学决策的依据。最优化方法的主要研究对象是各种管理问题及其生产经营活动。最优化方法的目的在于针对所研究的系统,求得一个合理运用人力、物力和财力的最佳方案,发挥和提高系统的效能及效益,最终达到系统的最优目标。实践表明,随着科学技术的日益进步和生产经营的日益发展,最优化方法已成为管理科学的重要理论基础和不可缺少的方法,被人们广泛地应用到公共管理、经济管理、工程建设、国防等各个领域,发挥着越来越重要的作用。这就是我理解的整个课程的流程。在这整个学习的过程当中,当然也会遇到很多的问题,不论是从理论上的还是从实际将算法编写出程序来解决一些问题。下面给出学习该课程的必要性及结合老师讲解以及在作业过程中遇到的问题来阐述自己对该课程的理解。 20世纪40年代以来,由于生产和科学研究突飞猛进地发展,特别是电子计算机日益广泛应用,使最优化问题的研究不仅成为一种迫切需要,而且有了求解的有力工具。因此最优化理论和算法迅速发展起来,形成一个新的学科。至今已出现线性规划、整数规划、非线性规划、几何规划、动态规划、随机规划、网络流等许多分文。 最优化理论与算法包括线性规划单纯形方法、对偶理论、灵敏度分析、运输问题、内点算法、非线性规划K-T条件、无约束最优化方法、约束最优化方法、参数线性规划、运输问题、线性规划路径跟踪法、信赖域方法、二次规划路径跟踪法、整数规划和动态规划等内容。 最优化理论所研究的问题是讨论在众多的方案中什么样的方案最优以及怎样找出最优方案。这类问题普遍存在。例如,工程设计中怎样选择设计参数,使得设计方案满足设计要求,又能降低成本;资源分配中,怎样分配有限资源,使得分配方案既能满足各方面的基本要求,又能获得好的经济效益;生产评价安排中,选择怎样的计划方案才能提高产值和利润;原料配比问题中,怎样确定各种成分的比例,才能提高质量,降低成本;城建规划中,怎样安排基本单位的合理布局,才能方便群众,有利于城市各行各业的发展;农田规划中,怎样安排各种农作物的合理布局,才能保持高产稳产,发挥地区优势;军事指挥中,怎样确定最佳作战方案,才能有效地消灭敌人,保存自己,有利于战争的全局;在人类活动的各个领域中,诸如此类,不胜枚举。最优化这一数学分支,正是为这些问题的解决,提供理论基础和求解方法,它是一门应用广泛、实用性强的学科。 一、最优化学习的必要性 最优化,在热工控制系统中应用非常广泛。为了达到最优化目的所提出的各种求解方法。从数学意义上说,最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。从经济意义上说,是在一定的人力、物力和财力资源条件下,使经济效果达到最大,或者在完成规定的生产或经济任务下,使投入的人力、物力和财力等资源为最少。
最优化理论与算法(第八章)
第八章 约束优化最优性条件 §8.1 约束优化问题 一、 问题基本形式 min ()f x 1()0 1,,.. ()0 ,,i e i e c x i m s t c x i m m +==?? ≥=?L L (8.1) 特别地,当()f x 为二次函数,而约束是线性约束时,称为二次规划。 记 {} 1()0 (1,,);()0 ,,i e i e X x c x i m c x i m m +===≥=L L ,称之为可行域(约束域)。 {}1,,e E m =L ,{}1,,e I m m +=L ,{}()()0 i I x i c x i I ==∈ 称()E I x U 是在x X ∈处的积极约束的指标集。积极约束也称有效约束,起作用约束或紧约束(active constraints or binding constraints )。 应该指出的是,如果x * 是(1)的局部最优解,且有某个0i I ∈,使得 0()0i c x *> 则将此约束去掉,x * 仍是余下问题的局部最优解。 事实上,若x *不是去掉此约束后所得问题的局部极小点,则意味着0δ?>,存在x δ,使得 x x δδ*-<,且()()f x f x δ*<,这里x δ满足新问题的全部约束。注意到当δ充分小时,由0() i c x 的连续性,必有0()0i c x δ≥,由此知x δ是原问题的可行解,但()()f x f x δ*<,这与x * 是局部极小 点矛盾。 因此如果有某种方式,可以知道在最优解x * 处的积极约束指标集()()A x E I x * *=U ,则问题 可转化为等式的约束问题: min ()f x .. ()0i s t c x = ()i A x *∈ (8.2) 一般地,这个问题较原问题(8.1)要简单,但遗憾的是,我们无法预先知道()A x * 。
最优化原理大作业
基于粒子群算法的神经网络在电液伺服系统中的应用 摘要:由于人工神经网络在解决具有非线性、不确定性等系统的控制问题上具有极大的潜力,因而在控制领域正引起人们的极大关注,并且已在一些响应较慢的过程控制中获得成功应用。由于电液伺服系统属 于非线性系统,因此本文利用神经网络控制电液伺服系统,并利用粒子群优化算法训练该神经网络的 权值。通过对神经网络的优化实现对电液伺服系统的控制。 关键词:神经网络电液伺服系统粒子群算法优化 近年来,由于神经网络具有大规模并行性、冗余性、容错性、本质的非线性及自组织自学习自适应能力,所以已成功地应用于众多领域。但在具有复杂非线性特性的机电设备的实时控制方面,虽然也有一些神经网络技术的应用研究,但距实用仍有一段距离。电液伺服系统就属于这类设备[1]。 神经网路在用于实时控制时,主要是利用了网络所具有的其输人——输出间的非线性映射能力。它实际上是通过学习来逼近控制对象的动、静态特性。也就是构造实际系统的神经网络模型[2]。本文利用神经网络控制一电液伺服系统,并利用粒子群优化算法训练该神经网络的权值,将结果与BP神经网络控制该系统的结果进行比较。从而得在电液伺服系统中引入神经网络是可行的。 1、粒子群算法 粒子群优化算法(Particle Swarm optimization, PSO)是一种进化计算技术, 由Eberhart博士和kennedy博士发明, 源于对鸟群捕食的行为研究, 粒子群优化算法的基本思想是通过群体中个体之间的协作和信息共享来寻找最优解[3]。算法最初受到飞鸟和鱼类集群活动的规律性启发,利用群体智能建立了一个简化模型,用组织社会行为代替了进化算法的自然选择机制,通过种群间个体协作来实现对问题最优解的搜索[4]。 在找到这两个最优值时, 粒子根据如下的公式来更新自己的速度和新的位置 v[]=v[]+c1*rand()*(pbest[]-present[]) + c2*rand()*(gbest[]-present[]) present[]=persent[]+v[] 式中ω为惯性权重,ω取大值可使算法具有较强的全局搜索能力,ω取小值则算法倾向于局部搜索。一般的做法是将ω初始取0.9并使其随迭代次数的增加而线性递减至0.4,这样就可以先侧重于全局搜索,使搜索空间快速收敛于某一区域,然后采用局部精细搜索以获得高精度的解;c1、c2为两个学习因子,一般取为2;randl和rand2为两个均匀分布在(0,l)之间的随机数;i=1,2,?,m;k=1,2,?,d。另外,粒子在每一维的速度Vi都被一个最大速度Vmax所限制。如果当前粒子的加速度导致它在某一维的速度 超过该维上的最大速度Vmax,则该维的速度被限制为最大速度[5]。 粒子群算法流程如下: (一)初始化粒子群。设群体规模为m,在允许的范围内随机设置粒子的初始位置和速 度。 (二)评价每个粒子的适应值。 (三)调整每一个粒子的位置和速度。 (四)如果达到最大迭代次数genmax或误差达到最初设定数值终止迭代,否则返回(2)。 2、神经网络 神经网络一般由输入层、隐含层、输出层组成。对于输入信号,先向前传播到隐节点,经过节点作用函数后,再把隐节点的输出信息传播到输出节点,最后输出结果。节点的作用函数通常选取S 型函数f(x)=1/(1+e-x)。神经网络算法的学习过程分为正
最优化方法大作业答案
1.用薄钢板制造一体积5m 3,长度不小于4m ,无上盖的货箱,要求钢板耗量最小。确定货箱的长x 1、宽x 2和高x 3。试列出问题的数学模型。 解:min 32312122x x x x x x z ++= s.t 5321=x x x 41≥x 0,,321≥x x x 2.将下面的线性规划问题表示为标准型并用单纯形法求解 max f=x 1+2x 2+x 3 s .t .2x 1+x 2-x 3≤2 -2x 1+x 2-5x 3≥-6 4x 1+x 2+x 3≤6 x i ≥0 i=1,2,3 解:先化标准形: Min 321x x x z -+= 224321=+-+x x x x 6525321=++-x x x x 646321=+++x x x x 列成表格:
1 2 1 610011460105122001112----- 可见此表已具备1°,2°,3°三个特点,可采用单纯形法。首先从底行中选元素-1,由2/2,6/2,6/4最小者决定选第一行第一列的元素2,标以记号,迭代一次得 1 2 1 2102310401162010021212 11-------- 再从底行中选元素-2/3,和第二列正元素1/2,迭代一次得 1 2 12 32 30 210231040116201002121211- ------ 再从底行中选元素-3,和第二列正元素2,迭代一次得 4 2 3 3 410120280114042001112--- 再迭代一次得 10 2 30 2 10 6 221023 1010213000421021013-- 选取最优解:
最优化理论与方法论文(DOC)(新)
优化理论与方法
全局及个性化web服务组合可信度的动态规划评估方法 摘要:随着Internet的快速发展,web服务作为一种软件构造形式其应用越来越广泛。单个web服务无法满足日益复杂的用户需求,web服务组合有效地解决了这个问题。然而,随着功能相似的web服务实例的不断出现,如何选择可信的web服务组合成为了人们关注的热点。服务选择依赖于web服务组合的评估结果,因此,本文主要从web服务组合着手,对其可信性进行研究,提供一种可信web服务组合评估方法。:针对web服务组合的全局及个性化问题,提出了基于全局的个性化web服务组合可信评估方法。从全局角度动态地调整评估模型;同时引入用户业务关注度来描述原子web服务对服务组合可信性的影响程度;结合前文的度量及评估方法,构建一个全局的个性化服务组合可信评估模型;并分析了模型的相关应用,给出了改进的动态规划模型。 关键字:web服务组合可信评价;全局个性化;动态规划; 0.引言 随着软件系统规模的日趋复杂,运行环境的不断开放,软件的可信性要求日益增加,可信软件成为了研究的热点。据《中国互联网发展状况统计报告》统计显示,截至2014年12月底,我国网民数量突破8亿,全年新增网民5580万。互联网普及率较上年底提升4个百分点,达到38。3%。因此,随着Internet 的广泛应用和网络技术的快速发展,面向服务的软件体系结构(SOA)作为一种新型的网络化软件应用模式已经被工业界和学术界广为接受。同时,网民对互联网电子商务类应用稳步发展,网络购物、网上支付、网上银行和在线旅游预订等应用的用户规模全面增长。因而,对web服务的可信性要求更高。单个web服务的功能有限,往往难以满足复杂的业务需求,只有通过对已有web服务进行组合,才能真正发挥其潜力。在现有的web服务基础上,通过服务组装或者Mashup方式生成新web服务作为一种新型的软件构造方式,已成为近年的研究热点之一。web服务组合并不是多个原子web服务的简单累加,各原子web服务之间有着较强的联系。因此对web服务组合的可信需求更高。目前大量的研究工作着重于如何实现原子web服务间的有效组合,对服务组合的可信评估研究较少。如今,随着web服务资源快速发展,出现了大量功能相同或相似的web服务,对web服务组合而言,选择可信的web服务变得越来越难。在大量的功能相似的原子web服务中,如何选出一组可信的web服务组合,成为了人们关注的热点问题。本文将从web服务组合着手,对其可信性进行研究,旨在提供一种可信web服务组合评估方法,为web服务组合的选择提供依据。web服务组合的可信度主要包括以下三个部分: 1)基于领域本体的web服务可信度量模型。 2)基于偏好推荐的原子web服务可信评估方法。 3)基于全局的个性化web服务组合可信评估方法。 研究思路: 本文主要研究基于全局的个性化web服务组合的可信评估方法,其研究思路可以大致如下:基于领域本体的web服务可信度和基于偏好推荐的原子web 服务可信评估方法。针对web服务组合的四种基本组合结构模式,主要研究如
最优化原理与方法复习
最优化原理与方法复习 第1章最优化问题的基本概念§最优化的概念最优化就是依据最优化原理和方法,在满足相关要求的前提下,以尽可能高的效率求得工程问题最优解决方案的过程。§最优化问题的数学模型 1.最优化问题的一般形式?findx1,x2,?,xn?minf(x,x,?,x)?12 n? (x,x,?,x)?0u?1,2,?,pu12n??hv(x1,x2,?,xn)? 0v?1,2,?,q? 2.最优化问题的向量表达式?findX?minf(X)?? (X)?0??H(X)?0?式中:X?[x1,x2,?,xn]T G(X)?[g1(X),g2(X),?,gp(X)]T H(X)?[h1(X),h2(X),?,hp(X)]T 3.优化模型的三要素设计变量、约束条件、目标函数称为优化设计的三要素!设计空间:设计变量所确定的空间。设计空间中的每一个点都代表一个设计方
案。§优化问题的分类按照优化模型中三要素的不同表现形式,优化问题有多种分类方法:1按照模型中是否存在约束条件,分为约束优化和无约束优化问题2按照目标函数和约束条件的性质分为线性优化和非线性优化问题3按照目标函数个数分为单目标优化和多目标优化问题4按照设计变量的性质不同分为连续变量优化和离散变量优化问题第2章最优化问题的数学基础§n元函数的可微性与梯度一、可微与梯度的定义1.可微的定义设f(X)是定义在n维空间Rn的子集D上的n元实值函数,且X0?D。若存在n维向量L,对于任意n维向量P,都有f(X0?P)?f(X0)?LTPlim?0 P?0P则称f(X)在X0处可微。 2.梯度设有函数F(X),X?[x1,x2,?,xn]T,在其定义域内连续可导。我们把F(X)在定义域内某点X处的所有一阶偏导数构成的列向量,定义为F(X)在点X处的梯度。记
最优化方法大作业答案
武工院你们懂的 1.用薄钢板制造一体积5m 3,长度不小于4m ,无上盖的货箱,要求钢板耗量最小。确定货箱的长x 1、宽x 2和高x 3。试列出问题的数学模型。 解:min 32312122x x x x x x z ++= s.t 5321=x x x 41≥x 0,,321≥x x x 2.将下面的线性规划问题表示为标准型并用单纯形法求解 max f=x 1+2x 2+x 3 s .t .2x 1+x 2-x 3≤2 -2x 1+x 2-5x 3≥-6 4x 1+x 2+x 3≤6 x i ≥0 i=1,2,3 解:先化标准形: Min 321x x x z -+= 224321=+-+x x x x 6525321=++-x x x x 646321=+++x x x x
列成表格: 00001216 100114 60105122001112----- 可见此表已具备1°,2°,3°三个特点,可采用单纯形法。首先从底行中选元素-1,由2/2,6/2,6/4最小者决定选第一行第一列的元素2,标以记号,迭代一次得 0000 1 2 121023 10 40116201002 1 21 211-------- 再从底行中选元素-2/3,和第二列正元素1/2,迭代一次得 1 002 1232 30210231 040116201002121211-- ----- 再从底行中选元素-3,和第二列正元素2,迭代一次得 4002 3 03410120280114042001112--- 再迭代一次得
10 23021 062 21023 1010 213 000421 2 10 13- - 选取最优解: 01=x 42=x 23=x 3. 试用DFP 变尺度法求解下列无约束优化问题。 min f (X )=4(x 1-5)2+(x 2-6)2 取初始点X=(8,9)T ,梯度精度ε=0.01。 解:取I H =0,初始点()T X 9,8= 2221)6()5(4)(-+-=x x x f ??????--=?122408)(21x x x f ???? ??=?624)() 0(x f T x f d )6,24()()0()0(--=-?= )0(0)0()1(d x x α+= T )69,248(00αα--= ])669()5248(4min[)(min 2020)0(0)0(--+--?=+αααd x f )6()63(2)24()2458(8) (00)0(0)0(=-?-+-?--=+ααααd d x df 13077.013017 0≈= α ???? ??=???? ??--?+???? ??=21538.886153.462413077.098)1(x
最优化方法大作业
发动机空燃比控制器 引言:我主要从事自动化相关研究。这里介绍我曾经接触过的发动机空燃比控制器设计中的优化问题。 发动机空燃比控制器设计中的最优化问题 AFR =a f m m && (1) 空燃比由方程(1)定义,在发动机运行过程中如果控制AFR 稳定在14.7可以获 得最好的动力性能和排放性能。如果假设进入气缸的空气流量a m &可以由相关单元检测得到,则可以通过控制进入气缸的燃油流量f m &来实现空燃比的精确控制。由于实际发动机的燃油喷嘴并不是直接对气缸喷燃油,而是通过进气歧管喷燃油,这么做会在进 气歧管壁上液化形成油膜,因此不仅是喷嘴喷出的未液化部分燃油会进入气缸,油膜 蒸发部分燃油也会进入气缸,如方程(2)。这样如何更好的喷射燃油成为了一个问题。 1110101122211ττττ?? ?? -?? ??????????=+????????-????????????-???? ? ??? ?? ????????? ?f f f v X x x u x x X x y =x && (2) 其中12、,==ff fv x m x m &&=f y m &,=fi u m &这里面,表示油膜蒸发量ff m &、fv m &表示为液化部分燃油、fi m &表示喷嘴喷射的燃油,在τf 、τv 、X 都已知的情况下,由现代控制理论知识,根据系统的增广状态空间模型方程(3) 0000001 1 011011114.70ττττ????-?? ??????????=-+-??????????????? ??????????????? ?? ??=?????? f f v v a X X u +q q m y q x x x &&& (3) 其中()0 14.7?t a q = y -m &。由极点配置方法,只要设计控制器方程(4),就可以 使得y 无差的跟踪阶跃输入,那么y 也能较好的跟踪AFR *a m /&。 12-- u =K q K x (4) 这里面的12、K K 确定,可由主导极点概念降维成两个参数12C ,C ,虽然都是最终稳态无差,但是目标是使得瞬态过程中y 和阶跃输入y r 的差异尽可能的小。所以原问
最优化理论与算法 fibonacci法
function [a,b,n,x]=fibonacci(fname,a,b,d,L) % fname函数句柄,d辨别常数,L最终区间长度a(1)=a; b(1)=b; F=zeros(1,10); %选择fibonacci数列k值为10,可任意更改 F(1)=1; F(2)=2; for k=2:10 %k取到10,生成fibonacci数列 F(k+1)=F(k)+F(k-1); F(k); end Fn=(b(1)-a(1))/L; Fk=[F Fn]; N=sort(Fk); n=find(Fn==N); %查找计算函数值的次数n t(1)=a(1)+F(n-2)*(b(1)-a(1))/F(n); %计算试探点t(1),u(1) u(1)=a(1)+F(n-1)*(b(1)-a(1))/F(n); for k=1:n-2 ft=feval(fname,t(k)); fu=feval(fname,u(k)); if ft>fu a(k+1)=t(k); b(k+1)=b(k); t(k+1)=u(k); u(k+1)=a(k+1)+F(n-k-1)*(b(k+1)-a(k+1))/F(n-k); while k==n-2 t(n)=t(n-1); u(n)=t(n-1)+d; ft=feval(fname,t(n)); fu=feval(fname,u(n)); if ft>fu a(n)=t(n); b(n)=b(n-1); else a(n)=a(n-1); b(n)=t(n); end end else a(k+1)=a(k); b(k+1)=u(k); u(k+1)=t(k); if k~=n-2 t(k+1)=a(k+1)+F(n-k-2)*(b(k+1)-a(k+1))/F(n-k); ft=feval(fname,t(k));
大连理工优化方法大作业MATLAB编程
function [x,dk,k]=fjqx(x,s) flag=0; a=0; b=0; k=0; d=1; while(flag==0) [p,q]=getpq(x,d,s); if (p<0) b=d; d=(d+a)/2; end if(p>=0)&&(q>=0) dk=d; x=x+d*s; flag=1; end k=k+1;
if(p>=0)&&(q<0) a=d; d=min{2*d,(d+b)/2}; end end %定义求函数值的函数fun,当输入为x0=(x1,x2)时,输出为f function f=fun(x) f=(x(2)-x(1)^2)^2+(1-x(1))^2; function gf=gfun(x) gf=[-4*x(1)*(x(2)-x(1)^2)+2*(x(1)-1),2*(x(2)-x(1)^2)]; function [p,q]=getpq(x,d,s) p=fun(x)-fun(x+d*s)+0.20*d*gfun(x)*s'; q=gfun(x+d*s)*s'-0.60*gfun(x)*s'; 结果: x=[0,1]; s=[-1,1]; [x,dk,k]=fjqx(x,s) x =-0.0000 1.0000 dk =1.1102e-016 k =54
function f= fun( X ) %所求问题目标函数 f=X(1)^2-2*X(1)*X(2)+2*X(2)^2+X(3)^2+ X(4)^2- X(2)*X(3)+2*X(1)+3*X(2)-X(3); end function g= gfun( X ) %所求问题目标函数梯度 g=[2*X(1)-2*X(2)+2,-2*X(1)+4*X(2)-X(3)+3,2*X(3)-X(2)-1,2*X(4)]; end function [ x,val,k ] = frcg( fun,gfun,x0 ) %功能:用FR共轭梯度法求无约束问题最小值 %输入:x0是初始点,fun和gfun分别是目标函数和梯度 %输出:x、val分别是最优点和最优值,k是迭代次数 maxk=5000;%最大迭代次数 rho=0.5;sigma=0.4;
优化原理与方法_作业答案
《优化原理与方法》作业解答要点 5.1 建造一容积为V (m 3)的长方形蓄水池(无盖),要求选择其长、宽、高,使表面积最小,从而建筑用料最省。试写出此问题的数学模型。 [解] 选择设计变量x 1、x 2、x 3分别代表蓄水池的长、宽、高,优化数学模型为: 5.2 某公司有资金a 万元,可供选择购置的设备有n 种,已知相应于第i 种设备所需资金为 b i 万元,可得收益为 c i 万元,要求收益最大的投资安排。试写出其数学模型。 [解] 选择设计变量x 1、x 2、…、x n 分别代表n 种可选购设备的购买数量,优化数学模型为: 5.3 某城市要建造一供应服务中心,向该市m 个用户提供服务,设第i 个用户的位置为(a i , b i ),需要货物量为w i 吨,试寻求这个中心最经济的位置,使运输量(吨公里数)最小。 [解] 选择设计变量x 1、x 2代表中心的位置坐标,优化数学模型为: ?? ?? ? ?? ? ? ≥≥≥=??++= t..s 22 .min ],,[ 3min 32min 21min 1321313221321x x x x x x V x x x x x x x x x x x x T 使得寻求x ????? ? ???? ?? ? ?=?=≥≤?=∑∑==n i x n i x a x b x c x x x i i n i i i n i i i T n ,1,2, , ,1,2, ,0 t..s .max ] , ,,[ 1 1 21为整数使得寻求x ?? ??? -+-=∑=m i i i i T b x a x w x x 1222121)()( .min ],[ 使得寻求x
最优化大作业
最优化方法大作业 ---------用优化算法求解函数最值问题
摘要 最优化(optimization) 是应用数学的重要研究领域.它是研究在给定约束之下如何寻求某些因素(的量),以使某一(或某些)指标达到最优的一些学科的总称。最优化问题一般包括最小化问题和最大化问题,而最大化问题可以通过简单的转化使之成最最小化问题。最小化问题分为两类,即约束最小化和无约束最小化问题。在此报告中,前两个问题属于无约束最小化问题的求解,报告中分别使用了“牛顿法”和“共轭梯度法”。后两个问题属于有约束最小化问题的求解,报告中分别用“外点法”和“内点法”求解。虽然命名不一样,其实质都是构造“惩罚函数”或者“障碍函数”,通过拉格朗日乘子法将有约束问题转化为无约束问题进行求解。再此报告中,“外点法”和“内点法”分别用了直接求导和调用“牛顿法”来求解无约束优化问题。 在此实验中,用“共轭梯度法”对“牛顿法”所解函数进行求解时出现错误,报告中另取一函数用“共轭梯度法”求解得到正确的结果。此实验中所有的函数其理论值都是显见的,分析计算结果可知程序正确,所求结果误差处于可接受范围内。 报告中对所用到的四种方法在其使用以前都有理论说明,对“外点法”中惩罚函数和“内点法”中障碍函数的选择也有相应的说明,另外,对此次试验中的收获也在报告的三部分给出。 本报告中所用程序代码一律用MATLAB编写。 【关键字】函数最优化牛顿法共轭梯度法内点法外点法 MATLAB
一,问题描述 1, 分别用共轭梯度发法和牛顿法来求解一下优化问题 ()()()()()4 41432243221102510min x x x x x x x x x f -+-+-++= 2, 分别用外点法和内点发求解一下优化问题 ?? ?≥-++0 1.min 212 231x x t s x x 二、问题求解 用牛顿法求解 ()()()()()4 414 322 432 21102510min x x x x x x x x x f -+-+-++= 1.1.1问题分析: 取步长为1而沿着牛顿方向迭代的方法称为牛顿法,在牛顿法中,初始点的取值随意,在以后的每次迭代中,()[] ()k k k k x f x f x x ??-=-+1 21,直到终止条件成立时停止。 1.1.2 问题求解 注:本程序编程语言为MATLAB ,终止条件为()162 110-≤?x f ,初始取值为 [10 10 10 10] M 文件(求解函数)如下: function s=newton1(f,c,eps) %c 是初值,eps 为允许误差值 if nargin==2 eps=; elseif nargin<1 error('') % return end syms x1 x2 x3 x4
最优化理论与算法(第三章)
第三章 牛顿法 §3.1 最速下降法 一、最速下降法 在极小化算法中,若每次都以迭代点处的负梯度方向为搜索方向,产生的算法称为最速下降法,它是无约束最优化算法中最简单、最基本的算法。 算法描述: 1) 给出初始点0n x R ∈,允许误差0ε>,0k =; 2) 计算k k d g =-,若k g ε≤,Stop 令 * k x x ≈; 3) 由一维搜索确定步长因子k α,使得 ()min ()k k k k k f x d f x d ααα≥+=+ 4) 令1k k k k x x d α+=+,1k k =+,go to 2). 的每个聚点均为驻点。 令{}1 k K d 有界,且 2 ()(())()0T f x f x f x ?-?=-?= 故有 ()0f x ?=。 定理 3.2 设()f x 二次连续可微,且2()f x M ?≤,则对任何给定的初始点0n x R ∈,最速下降算法或有限终止,或lim ()k k f x →∞ =-∞,或lim ()0k k f x →∞ ?=。
证明:不妨设k ?,()0k f x ?≠。由定理2.5有 2 11()()()2k k k f x f x f x M +-≥ ? 于是 []1 2 010 1 ()()()()()2k k k i i i i i f x f x f x f x f x M -+==-=-≥ ?∑∑ 令k →∞,由{()}k f x 为单调下降序列,则要么 lim ()k k f x →∞ =-∞,要么 lim k →∞ ?定理3.3 设1 f C ∈证明:直接由定理2.14可得。 注:1) 2 1λ,n λ分别为G 的 ≤ ()k k I G x α- 其中k α使 (())(())k k k f I G x f I G x αα-≤-, 0α?≥ 若设 ()1k P t t α=-,()Q t ut λ=- 其中,u R λ∈。则有 ()Q G I uG λ=-,而(0)Q λ=,
2011年下学期最优化理论与方法考试试卷(A)
中南大学考试试卷 2011--2012学年 1 学期 时间100分钟 最优化理论与方法 课程 48 学时 学分 考试形式: 闭 卷 专业年级: 信科08、应数08 总分100分,占总评成绩 70 % 注:此页不作答题纸,请将答案写在答题纸上,可用中英文作答。 1.(15 points ) For an unconstrained optimization problem: ),(min x f Let )0(x be a given point, )0(d be a descent search direction at )0(x . (1) With the exact line search, show that there is a steplength 0α satisfying .0)()0()0(0)0(=+?d d x f T α (2)Show that when applied to a quadratic objective function, the Newton method with the exact line search terminates in at most one iteration. 2. (15 points )For an unconstrained optimization problem: .2)(min 2 221x x x f += (1) Find a descent direction )0(d of f at .)1,1() 0(T x = (2) By the Armijo line search, find a steplength 0α along )0(d at .)0(x 3.(15 points ) (1)Let .2113???? ??=A Find two directions 1d and 2d such that 1d and 2d are conjugate with respect to the matrix A . (2)Show that when applied to a quadratic objective function, with the exact line search, the PRP conjugate gradient method is equivalent to the FR conjugate gradient method.
大连理工大学优化方法上机大作业
2016年大连理工大学优化 方法上机大作业 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
2016年大连理工大学优化方法上机大作业学院: 专业: 班级: 学号: 姓名: 上机大作业1: 1.最速下降法:
function f = fun(x) f = (1-x(1))^2 + 100*(x(2)-x(1)^2)^2; end function g = grad(x) g = zeros(2,1); g(1)=2*(x(1)-1)+400*x(1)*(x(1)^2-x(2)); g(2) = 200*(x(2)-x(1)^2); end function x_star = steepest(x0,eps) gk = grad(x0); res = norm(gk); k = 0; while res > eps && k<=1000 dk = -gk;
ak =1; f0 = fun(x0); f1 = fun(x0+ak*dk); slope = dot(gk,dk); while f1 > f0 + 0.1*ak*slope ak = ak/4; xk = x0 + ak*dk; f1 = fun(xk); end k = k+1; x0 = xk; gk = grad(xk); res = norm(gk); fprintf('--The %d-th iter, the residual is %f\n',k,res); end x_star = xk; end >> clear >> x0=[0,0]'; >> eps=1e-4; >> x=steepest(x0,eps)
最优化理论与算法
最优化理论与算法笔记 在老师的指导下,我学习了最优化理论与算法这门课程。最优化理论与算法是一个重要的数学分支,它所研究的问题是讨论在众多方案中什么样的方案最优以及怎样找出最优方案。 由于生产和科学研究突飞猛进的发展,特别是计算机的广泛应用,使最优化问题的研究不仅成为了一种迫切的需要,而且有了求解的有力工具,因此迅速发展起来形成一个新的学科。至今已出现了线性规划、整数规划、非线性规划、几何规划、动态规划、随机规划、网络流等许多分支。 整个学习安排如下,首先介绍线性与非线性规划问题,凸集和凸函数等基本知识及线性规划的基本性质;然后再这个基础上学习各种算法,包括单纯形法、两阶段法、大M 法、最速下降法、牛顿法、共轭梯度法等,以及各种算法相关的定理和结论;最后了解各种算法的实际应用。 主要学习的基础知识: 1、一般线性规划问题的标准形式 1min n j j j c x =∑ 1 .., 1,...,, 0, 1,...,. n ij j i j j s t a x b i m x j n ===≥=∑ 学会引入松弛变量将一般问题化为标准问题;同时掌握基本可行解的存在问题,通过学习容易发现线性规划问题的求解,可归结为求最优基本可行解的问题。 2、熟练掌握单纯形法、两阶段法和大M 法的概念及其计算步骤。 单纯形法是一种是用方便、行之有效的重要算法,它已成为线性规划的中心内容。其计算步骤如下: 1)解,B Bx b =求得1B x B b b -==,令0,N x =计算目标函数值B B f c x =;
2)求单纯形乘子ω,解B B c ω= ,得到1B c B ω-=; 3)解k k By p =,若0k y ≤,即k y 的每个分量均非正数,则停止计算,问 题不存在有限最优解,否则,进行步骤(4); 4)确定下标r ,使min{0}r r rk rk rk b b y y y =>,得到新的基矩阵B ,返回第一 步。 两阶段法:第一阶段是用单纯形法消去人工变量,即把人工变量都变换成非基变量,求出原来问题的一个基本可行解;第二阶段是从得到的基本可行解出发,用单纯形法求线性规划的最优解。 大M 法:在约束中增加人工变量a x ,同时修改目标函数,加上罚项T a Me x ,其中M 是很大的正数,这样,在极小化目标函数的过程中,由于M 的存在,将迫使人工变量离基。 3、掌握最速下降法的概念及其算法,并且能够讨论最速下降算法的收敛性。掌握牛顿法,能够熟练运用牛顿迭代公式:(1) ()2()()()()k k k k x x f x x x +=-?- ,掌 握共轭梯度法及其相关结论,以及其收敛性的讨论,掌握最小二乘法及其基本步骤。 最速下降法:迭代公式为(1) ()()k k k k x x d λ+=-。 计算步骤:1)给定点(1)n x R ∈,允许误差0,ε>臵1k =; 2)计算搜索方向() ()()k k d f x =-?; 3)若() k d ε≤,则停止计算,否则,从()k x 出发,沿()k d 进行一维搜索,求k λ,使()()()() ()min ()k k k k k f x d f x d λλλ≥+=+; 4)令(1) ()()k k k k x x d λ+=-,臵:1k k =+,转步骤(2)。
最优化大作业
最优化大作业 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
最优化方法大作业 ---------用优化算法求解函数最值问题
摘要 最优化(optimization) 是应用数学的重要研究领域.它是研究在给定约束之下如何寻求某些因素(的量),以使某一(或某些)指标达到最优的一些学科的总称。最优化问题一般包括最小化问题和最大化问题,而最大化问题可以通过简单的转化使之成最最小化问题。最小化问题分为两类,即约束最小化和无约束最小化问题。在此报告中,前两个问题属于无约束最小化问题的求解,报告中分别使用了“牛顿法”和“共轭梯度法”。后两个问题属于有约束最小化问题的求解,报告中分别用“外点法”和“内点法”求解。虽然命名不一样,其实质都是构造“惩罚函数”或者“障碍函数”,通过拉格朗日乘子法将有约束问题转化为无约束问题进行求解。再此报告中,“外点法”和“内点法”分别用了直接求导和调用“牛顿法”来求解无约束优化问题。 在此实验中,用“共轭梯度法”对“牛顿法”所解函数进行求解时出现错误,报告中另取一函数用“共轭梯度法”求解得到正确的结果。此实验中所有的函数其理论值都是显见的,分析计算结果可知程序正确,所求结果误差处于可接受范围内。 报告中对所用到的四种方法在其使用以前都有理论说明,对“外点法”中惩罚函数和“内点法”中障碍函数的选择也有相应的说明,另外,对此次试验中的收获也在报告的三部分给出。 本报告中所用程序代码一律用MATLAB编写。 【关键字】函数最优化牛顿法共轭梯度法内点法外点法 MATLAB
一,问题描述 1, 分别用共轭梯度发法和牛顿法来求解一下优化问题 ()()()()()4 41432243221102510min x x x x x x x x x f -+-+-++= 2, 分别用外点法和内点发求解一下优化问题 ?? ?≥-++0 1.min 212 231x x t s x x 二、问题求解 1.1 用牛顿法求解 ()()()()()4 414 322 432 21102510min x x x x x x x x x f -+-+-++= 1.1.1问题分析: 取步长为1而沿着牛顿方向迭代的方法称为牛顿法,在牛顿法中,初始点的取值随意,在以后的每次迭代中,()[] ()k k k k x f x f x x ??-=-+1 21,直到终止条件成立时停止。 1.1.2 问题求解 注:本程序编程语言为MATLAB ,终止条件为()162 110-≤?x f ,初始取值为[10 10 10 10] M 文件(求解函数)如下: function s=newton1(f,c,eps) %c 是初值,eps 为允许误差值 if nargin==2 eps=1.0e-16; elseif nargin<1 error('')