IR全桥驱动
驱动桥的工作原理
驱动桥的工作原理 驱动桥处于动力传动系的末端,其基本功能有如下三个方面: 1、增大由传动轴或变速器传来的转矩,并将动力传到驱动轮,产生牵引力。 2、通过差速器将动力合理的分配给左、右驱动轮,使左右驱动轮有合理的转速 差,使汽车在不同路况下行驶。 3、承受作用于路面和车架或车身之间的垂直力、纵向力和横向力。 驱动桥的组成: 驱动桥一般由主减速器、差速器、车轮传动装置和驱动桥壳等组成。 1-后桥壳;2-差速器壳;3-差速器行星齿轮;4-差速器半轴齿轮;5-半轴;6-主减速器从动齿轮;7-主减速器主动锥齿轮 对一些载重较大的载重汽车,要求较大的减速比,用单级主减速器传动,则从动齿轮的直径就必须增大,会影响驱动桥的离地间隙,所以采用两次减速。通常称为双级减速器。双级减速器有两组减速齿轮,实现两次减速增扭。 A、在主减速器内完成双级减速 为提高锥形齿轮副的啮合平稳性和强度,第一级减速齿轮副是螺旋锥齿轮。二级齿轮副是斜齿圆柱齿轮。 主动圆锥齿轮旋转,带动从动圆银齿轮旋转,从而完成一级减速。第二级减速的主动圆柱齿轮与从动圆锥齿轮同轴而一起旋转,并带动从动圆柱齿轮旋转,进行第二级减速。因从动圆柱齿轮安装于差速器外壳上,所以,当从动圆柱齿轮转动时,通过差速器和半轴即驱动车轮转动 B、轮边减速: 将二级减速器设计在轮毂中,其结构是半轴的末端是小直径的外齿轮,周围有一组行星齿轮(一般5个),轮毂内有齿包围这组行星齿轮,以达到减速驱动的目的。 优点: a、由于半轴在轮边减速器之前,所承受扭矩减小,减速性能更好(驱动力加大); b、半轴、差速器等尺寸减小,车辆通过性能大大提高。 缺点: a、结构复杂,成本增加。 b、载质量大、平顺性小(故只用于重型车)。
半桥电路的工作原理及注意问题
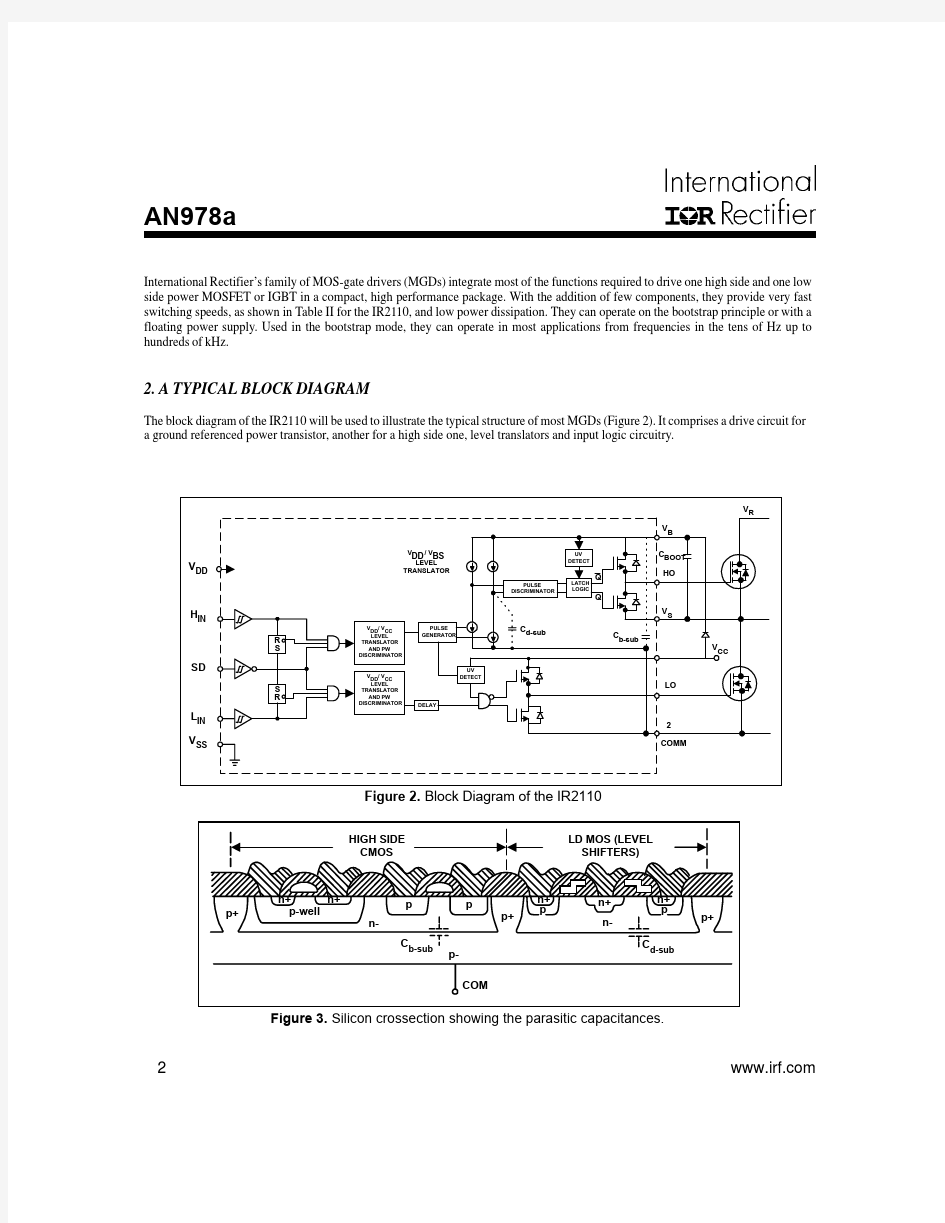
半桥电路的工作原理及注意问题 在PWM和电子镇流器当中,半桥电路发挥着重要的作用。半桥电路由两个功率开关器件组成,它们以图腾柱的形式连接在一起,并进行输出,提供方波信号。本篇文章将为大家介绍半桥电路的工作原理,以及半桥电路当中应该注意的一些问题,希望能够帮助电源新手们更快的理解半桥电路。首先我们先来了解一下半桥电路的基本拓扑: 半桥电路的基本拓扑电路图 电容器C1和C2与开关管Q1、Q2组成桥,桥的对角线接变压器T1的原边绕组,故称半桥变换器。如果此时C1=C2,那么当某一开关管导通时,绕组上的电压只有电源电压的一半。半桥电路概念的引入及其工作原理电路的工作过程大致如下:参照半桥电路的基本拓扑电路图,其中Q1开通,Q2关断,此时变压器两端所加的电压为母线电压的一半,同时能量由原边向副边传递。Q1 关断,Q2关断,此时变压器副边两个绕组由于整流二极管两个管子同时续流而处于短路状态,原边绕组也相当于短路状态。Q1关断,Q2开通。此时变压器两端所加的电压也基本上是母线电压的一半,同时能量由原边向副边传递。副边两个二极管完成换流。半桥电路中应该注意的几点问题偏磁问题原因:由于两个电容连接点A的电位是随Q1、Q2导通情况而浮动的,所以能够自动的平衡每个晶体管开关的伏秒值,当浮动不满足要求时,假设Q1、Q2具有不同的开关特性,即在相同的基极脉冲宽度t=t1下,Q1关断较慢,Q2关断较快,则对B点的电压就会有影响,就会有有灰色面积中A1、A2的不平衡伏秒值,原因就是Q1关断延迟。如果要这种不平衡的波形驱动变压器,将会发生偏磁现象,致使铁心饱和并产生过大的晶体管集电极电流,从而降低了变换器的效
NS SM72295光伏全桥驱动解决方案
NS SM72295光伏全桥驱动解决方案 NS公司的SM72295是能驱动全桥连接的4个分立N沟MOSFET的驱动器,可提供峰值电流3A,并集成了电压高达115VDC高速自举二极管,电流检测可编程的2个跨导放大器来完成,并能去掉波纹电流为控制电路提供平均电流信息.主要用在微型逆变器,功率优化器,充电器和屏安全系统.本文介绍了SM72295主要特性, 功能方框图和典型应用电路图.The SM72295 is designed to drive 4 discrete N type MOSFET’s in a full bridge configuration. The drivers provide 3A of peak current for fast efficient switching and integrated high speed bootstrap diodes. Current sensing is provided by 2 transconductance amplifiers with externally programmable gain and filtering to remove ripple current to provide average current information to the control circuit. The current sense amplifiers have buffered outputs available to provide a low impedance interface to an A/D converter if needed. An externally programmable input over voltage comparator is also included to shutdown all outputs. Under voltage lockout with a PGOOD indicator prevents the drivers from operating if VCC is too low.SM72295主要特性:■ Renewable Energy Grade■ Dual Half Bridge MOSFET Drivers■ Integrated 100V bootstrap diodes■ Independent High and Low driver logic inputs■ Bootstrap supply voltage range up to 115V DC■ Two current sense amplifiers with externally programmable gain and buffered outputs■ Programmable over voltage protection■ Supply rail under-voltage lockouts with power good Indicator图1.SM72295功能方框图图2.SM72295典型应用电路图详情请见:/ds/SM/SM72295.pdf
1章4节驱动桥
第四节驱动桥 汽车驱动桥的功用是把由万向传动装置或直接由变速器传来的转矩传递给左、右驱动车轮,实现降速增扭、改变转矩的传递方向,实现两侧车轮的差速,承受作用于路面和车架或车厢之间的各向力。 驱动桥应能保证具有合适的主减速比,使汽车具有良好的动力性和经济性;具有较大的离地间隙以保证良好的通过性;尽可能减轻重量以提高行驶的平顺性。 一、驱动桥的组成 一般汽车驱动桥包括主减速器、差速器、半轴和驱动桥壳等组成,如图1-4-1所示。 发动机的动力经离合器、变速器(或分动器)、万向传动装置输入驱动桥,首先传到主减速器 图1-4-1 非断开式驱动桥图1-4-2 断开式驱动桥 1-驱动桥壳2-主减速器3-差速器4-半轴5-轮毂 1-主减速器 2-半袖 3-弹性元件 4-减振器 5-车轮 6-摆臂 7-摆臂轴 2,增大转矩降低转速后,再由差速器3分配给左右半轴4,最后通过半轴外端的凸缘盘传至驱动车轮的轮毂5。驱动桥壳1由主减速器壳和半轴套管组成。轮毂借助轴承支承在半轴套管上。 二、驱动桥的类型 驱动桥按其半轴套管与主减速器壳体的连接方式可分为非断开式(或称整体式)驱动桥和断开式驱动桥两种。 在非断开式驱动桥(图1-4-1)中,半轴套管与主减速器壳刚性连成一体,整个驱动桥通过非独立弹性悬架与车架连接,故左、右半轴和驱动轮相对主减速器没有相对运动,亦称为整体式驱动桥。其结构简单,但平顺性差,一般多用于普通车辆。 在图1-4-2中,左、右半轴2的内端通过万向节与主减速器1相连,外端通过万向节与驱动轮相连,主减速器固连于车架上,而左、右驱动轮则分别通过悬架与车架相连。这样,两侧驱动轮就可以彼此独立地相对与主减速器上下跳动。因此,驱动桥壳分成左右两段并通过铰链与半轴连接,故称这种驱动桥为断开式驱动桥。这种驱动桥为适应车轮绕摆臂轴7上下跳动的需要,差速器与轮毂之间的半轴两端用万向节连接。 断开式驱动桥的优点是可以提高汽车行驶平顺性和通过性,相应采用的悬架为独立悬架。其缺点是结构复杂,制造成本高,故许多轿车和越野汽车的驱动桥采用独立悬架。 若驱动桥同时兼作转向桥时,则此类驱动桥称为转向驱动桥,它与车架之间可以是非独立
驱动桥有限元分析(1)
基于ANSYS的汽车驱动桥壳的有限元分 析 武汉理工…-icad 有限元法是一种在工程分析中常用的解决复杂问题的近似数值分析方法,以其在机械结构强度和刚度分析方面具有较高的计算精度而得到普遍应用,特别是在材料应力、应变的线性范围更是如此。在汽车设计领域,无论是车身、车架的计算仿真,还是发动机的曲轴以及传动系统的计算均 使用到该方法。 有限元分析最基本的研究方法就是“结构离散→单元分析→整体求解”的过程。经过近50年的发展,有限元法的理论日趋完善,已经开发出了一批通用和专用的有限元软件。ANSYS是当前国际上流行的有限元分析软件,广泛地应用于各行各业,是一种通用程序,可以用它进行所有行业的几乎任何类型的有限元分析,如汽车、宇航、铁路、机械和电子等行业。ANSYS软件将实体建模、系统组装、有限元前后处理、有限元求解和系统动态分析等集成一体,最大限度地满足工程设计分析的需要。通过结合ANSYS软件,能高效准确地建立分析构件的三维实体模型,自动生成有限元网格,建立相应的约束及载荷工况,并自动进行有限元求解,对模态分析计算结果进行图形显示和结果输出,对结构的动态特性作出评价。它包括结构分析、模态分析、磁场分析、热分析和多物理场分析等众多功能模块。 汽车驱动桥壳是汽车上的主要承载构件之一,其作用主要有:支撑并保护主减速器、差速器和半轴等,使左右驱动车轮的轴向相对位置固定;同从动桥一起支撑车架及其上的各总成质量;汽车行驶时,承受由车轮传来的路面反作用力和力矩并经悬架传给车架等。驱动桥壳应有足够的强度和刚度且质量小,并便于主减速器的拆装和调整。由于桥壳的尺寸和质量比较大,制造较困难,故其结构型式应在满足使用要求的前提下应尽可能便于制造。驱动桥壳分为整体式桥壳,分段式桥壳和组合式桥壳三类。整体式桥壳具有较大的强度和刚度,且便于主减速器的装配、调整和维修,因此普遍应用于各类汽车上。但是由于其形状复杂,因此应力计算比较困难。根据汽车设计理论,驱动桥壳的常规设计方法是将桥壳看成一个简支梁并校核几种典型计算工况下某些特定断面的最大应力值,然后考虑一个安全系数来确定工作应力,这种设计方法有很多局限性。因此近年来,许多研究人员利用有限元方法对驱动桥壳进行了计算和分析。本文中所研究的对象是在某型号货车上使用的整体式桥壳。 一、驱动桥壳强度分析计算 可将桥壳视为一空心横梁,两端经轮毂轴承支撑于车轮上,在钢板弹簧座处桥壳承受汽车的簧上载荷,而沿左右轮胎中心线,地面给轮胎以反力(双胎时则沿双胎中心),桥壳承受此力与车轮重 力之差,受力如图1所示。
IR2181S驱动芯片在全桥电路中应用设计和注意事项
具体设计电路时如将 MOSFET或IGBT作为高压侧开关 (漏极直接接在高压母线上)需在应用的时候需要注意以下几点: (1)栅极电压一定要比漏极电压高10-15V作为高压侧开 关时 ,栅极电压是系统中电压最高的。 (2)栅极电压从逻辑上看必须是可控制的 ,低压侧一般是 以地为参考点的 ,但在高端是就必须转换成高压侧的源极电 位,相当于将栅极驱动的地悬浮在源极上,所以在实际应用栅极控制电压是在母线电压之间浮动的。 (3)栅极驱动电路吸收的功率不会显著影响整个电路的 效率。 图2是以IR2181S驱动芯片设计的三相全桥电路图2中应用到三个IR2181S驱动芯片每路驱动一组桥臂 提供高端和低端两路驱动信号(HO*,LO*),以第一路桥臂为例(其它同理):IR2181S输入是由DSP或其他专用驱动信号发生 芯片产生的高端和低端两路驱动信号,经过 2181 输出同样也
全桥驱动全桥整流变换器的高频变压器设计2
全桥驱动全桥整流变换器的高频变压器设计 1、根据电路形式、输出电压电流、变压器效率计算变压器的传送功率。 2、确定工作磁感应强度、电流密度系数、窗口占空系数(利用率)、工作频率、波形因数。 3、计算功率面积乘积并据此选择磁芯,根据所选磁芯参数计算电流密度。 4、根据伏秒积计算原边绕组匝数;根据电压比计算副边绕组匝数。 5、根据功率和波形因数计算各绕组电流幅值。 1、变压器传送功率计算 o o o P I U =? o I P P η = 11t o I o P P P P η?? ? ??? =+=+ 2、功率面积乘积计算 对于全桥驱动,变压器的2m B B ?=。其中,0.15~0.25m B =,电流密度系数400J K =,窗口占空系数0.2~0.4Ko =,工作频率 20Z f KH = ,波形因数f K =。
1.16 411104o p J c m P A K A B f η???? ? ? ? ? ?? ? ? ? ? ?? ? +?=???? 3、选择磁芯,计算电流密度 0.14()J p J K A -=? 4、原边和副边绕组匝数: 124p on p m c m c U t U D N B A B A f ??==??? 21s p U N N U = 5、原边和副边绕组电流幅值: 副边绕组电流幅值:2o I I D = o s s s s o o o s o s o s P U I U I D U I U U I I D I I D ==??=?=∴=?∴= 原边绕组电流幅值:o p p P I U D η=??
全桥变换器输出电压与输入电压关系推导 伏秒积产生磁通链: t t p p p c p p s s s c s s U N B A L I U N B A L I ??=?Φ=???=????=?Φ=???=?? 原边能量:()2 2 211222p on p on p p p p p U t U t L i L L L ?? ? ???????=??= 副边能量:()22 2 11222s on s on s s s s s U t U t L i L L L ?? ? ??? ????=??= 两边相等:()( )22 22p on s on s s p p p s U t U t U N U N L L ??= ?== 结论:正激变换器输出与输入的电压比等于副边与原边的匝数比 全桥驱动全桥整流变换器的高频变压器A P 公式推导 伏秒积产生磁通链: 222p on p p p m c T D U t U D U N B A f ?=??=?=?? 得原边匝数和副边匝数: 4p p m c U D N B A f ?= ?? 由于 p s p s U U N N =,故: 4s s m c U D N B A f ?= ?? 窗口中包含的总电流为:
IR2104 + IRF540 MOS电机驱动全桥
R2104 + IRF540 MOS电机驱动全桥学习与实践过程 https://www.360docs.net/doc/609223699.html,/bbs/article_1012_130178.html 使用L293或L298等全桥芯片来控制直流电机虽然简便而且成本低廉,但由于它们的内阻较大,在控制大电流的马达时芯片常常过热,导致系统的整体效率较低。在电动车上,马达控制芯片的内阻过大会导致车子的加速度变小。 本人设想在暑假制作一个大的轮式或者履带式机器人,并且希望它能跑到公交车那么快,于是开始研究如何使用MOS管来控制更大电流的电机。 首先,本人参考了《大功率直流马达的驱动——ABU ROBOCON 2005比赛之动力方案》一文中的电路图(原文地址 https://www.360docs.net/doc/609223699.html,/article.php?sid=192 ) 按照这个原理图,我热转印制作了单个全桥的实验电路。个别的电阻电容值有所变动。 上电并给予有效的持续高电平信号后发现电路不能驱动马达,而2104开始发烫,540没有任何反应。于是更换2104,但仍出现同样的现象。通过示波器检测发现,高端MOS没有被驱动,而低端MOS的G端信号正常,因而桥没有被导通。更换信号方向,另外半桥仍然出现相同的现象。 本人开始怀疑是BOOTSTRAP电容的问题,于是实验了不同的电容值。但无论怎么变换,问题仍然没有被解决。由于手头没有4148,使用了IN5819作为续流二极管,按道理5819只会比4148更好,不应该成为问题的原因。 由于手头2104只有6片,而所有的都上电并且发热过,于是重新购买了一批2104。在这里感谢周顺同学,那天刚好他毕业考考好,帮我到科技京城买了2104。 更换2104后,电路工作正常。周顺看了看我原来的2104,恍然大悟:原来的芯片是97年前的旧货。 马达欢快地转了起来。由于540的内阻要比298小很多,马达的加速度明显提高,变向时电刷更是发出了闪亮的火星。 回到家后用示波器开始研究高端MOS的G端驱动电压波形。发现在EN端为高的初期,高端MOS的驱动电压突然升至比VCC高10V。此时强推动作用起效。但随着时间的流逝,该电压逐渐衰减为VCC,MOS的导通程度越来越不完全。直到下一个脉冲到来,G端电压又恢复为VCC+10V,但又逐渐衰减。也就是说,用持续的高电平信号来驱动MOS会导致MOS不能被完全导通,致使MOS 发热,马达的实际功率低下。使用PWM信号则可以解决这个问题,它使BOOTSTRAP电容反复充电放电,使高端驱动电压始终维持在一个比较高的水平。倘若想让马达全速前进,不能使用持续的高
步进电机驱动之全桥驱动与斩波恒流
步进电机驱动之全桥驱动与斩波恒流 先看两相绕组的全桥驱动电路,四路基本相同的驱动电路,抓取一组电路来分析: 全桥驱动电路,其中Q7和Q8基极和发射极短接,相当于一个反向的二极管。 为了便于分析,将原理图简化后如下所示:
查看IM2000S芯片手册,对全桥驱动芯片输入脚的定义如下: 以上四个输入端:B相高低端全桥控制信号,用来控制离散的PN,NN的全桥或者半桥IC. 从上述可以知道,输出的是一个离散量,那么,是怎样控制电机,使电机获得一个sin和cos 的电流信号而驱动电机的呢? 这里要深入理解一个概念:斩波恒流! 斩波恒流的原理是:当环形分配器导通的时候,IC2使得TL和TH导通,电源通过TH和TL 和电机向下有电流输出,此时R左端的电压上升,当电流上升到给定电平时,比较器反转,输出为低,使得IC1截止,此时电感使电流缓慢下降,此时通过TL采样的电压变低,当电压低于给定电平时候,比较器反转,使得IC1再次导通,这样可以快速的波动,而使电感上的电流保持一个恒定的值。当环形分配器给出低电平时,IC1和IC2截止,电流通过D2流入电源,从而实现节能。 此时,再看上图,会发现: 1、BHO和ALO为一个通路,AHO和BLO为一个通路,实现电流的正向和反向。 2、BHO和AHO的开关频率会比BL0,ALO大很多,BL0和ALO只有在正向和负方向反转的时 候出现跳变,而BHO和AHO的频率会很快以实现恒流。
这里值得注意的一点是,上述过程仅仅是在一个细分时候,一个数模转换量上保持的恒流。如果整步为256细分,则在256细分的每一个细分阶段实际上过程就是上文红色字体运行一遍的一个过程,而要使整个电机转动一圈,则需要完成一个SIN和COS的整个过程,如果上面的过程仍然无法理解,请参看步进电机细分方面的内容。 从整个驱动电路的系统上看, 整个闭环是按照如下进行工作的:
汽车驱动桥的详细结构及分类
驱动桥的详细结构及分类 我爱车网类型:转载来源:腾讯汽车时间:2011-03-02 作者: 驱动桥主要由主减速器、差速器、半轴和驱动桥壳等组成。它的作用是将万向传动装置传来的动力折过90°角,改变力的传递方向,并由主减速器降低转速,增大转矩后,经差速器分配给左右半轴和驱动轮。 驱动桥的结构型式按工作特性分,可以归并为两大类,即非断开式驱动桥和断开式驱动桥。当驱动车轮采用非独立悬架时,应该选用非断开式驱动桥;当驱动车轮采用独立悬架时,则应该选用断开式驱动桥。因此,前者又称为非独立悬架驱动桥;后者称为独立悬架驱动桥。独立悬架驱动桥结构较复杂,但可以大大提高汽车在不平路面上的行驶平顺性。 (1)非断开式驱动桥 普通非断开式驱动桥,由于结构简单、造价低廉、工作可靠,广泛用在各种载货汽车、客车和公共汽车上,在多数的越野汽车和部分轿车上也采用这种结构。他们的具体结构、特别是桥壳结构虽然各不相同,但是有一个共同特点,即桥壳是一根支承在左右驱动车轮上的刚性空心梁,齿轮及半轴等传动部件安装在其中。这时整个驱动桥、驱动车轮及部分传动轴均属于簧下质量,汽车簧下质量较大,这是它的一个缺点。 整体式驱动桥即非断开式驱动桥组成 驱动桥的轮廓尺寸主要取决于主减速器的型式。在汽车轮胎尺寸和驱动桥下的最小离地间隙已经确定的情况下,也就限定了主减速器从动齿轮直径的尺寸。在给定速比的条件下,如果单级主减速器不能满足离地间隙要求,可该用双级结构。在双级主减速器中,通常把两级减速器齿轮放在一个主减速器壳体内,也可以将第二级减速齿轮作为轮边减速器。对于轮边减速器:越野汽车为了提高离地间隙,可以将一对圆柱齿轮构成的轮边减速器的主动齿轮置于其从动齿轮的垂直上方;公共汽车为了降低汽车的质心高度和车厢地板高度,以提高稳定性和乘客上下车的方便,可将轮边减速器的主动齿轮置于其从动齿轮的垂直下方;有些双层公共汽车为了进一步降低车厢地板高度,在采用圆柱齿轮轮边减速器的同时,将主减速器及差速器总成也移到一个驱动车轮的旁边。 在少数具有高速发动机的大型公共汽车、多桥驱动汽车和超重型载货汽车上,有时采用蜗轮式主减速器,它不仅具有在质量小、尺寸紧凑的情况下可以得到大的传动比以及工作平滑无声的优点,而且对汽车的总体布置很方便。
IR2110驱动MOS IGBT组成H桥原理与驱动电路分析
IR2110驱动MOS IGBT组成H桥原理与驱动电路分析 3.3 电机驱动模块设计 3.3.1 H桥工作原理及驱动分析
3.3.2 前级PWM信号和方向控制信号逻辑处理电路设计分析 由于H桥控制MOS管的开关需要4路控制信号,对于由NMOS管组成H桥的一侧而言,一般情况下,上下两管共用一个控制信号,并且其中一只NMOS管的控制信号是将共用的控制信号反向得到的,如图3-7所示,74HC14的作用是将输入的控制信号反向作为下管的控制信号,从而保证上下两个MOS管不会同时导通,那么对于一个完整的H桥就要2路PWM信号来控制电机的速度和正反转,而且两路PWM信号还必须保证同步且极性相反,对于低端单片机而言这一点不是很容易做到。
图3-7 一般控制信号处理原理图 本设计在上面所述的思想上做了改进和延伸,通过一路PWM信号、一路DIR方向控制信号、74HC00、74HC08数字芯片,实现四路控制信号的输出,上下两管的逻辑控制信号具有有互锁保护功能,从而保证同侧桥臂的上下NMOS管不会同时导通造成能量浪费甚至烧毁MOS管和电源。如图3-8所示,HIN1、LIN1、HIN2、LIN2分别为两侧上下管的控制信号,HIN1、LIN1不能同时为1,HIN2、LIN2不能同时为1。DIR=1时,电机正转,DIR=0时,电机反转。当DIR=1正转时,LIN2恒为1,图3-9中Q3始终导通,HIN1、LIN1通过PWM 控制导通时间调节转速,当DIR=0反转时,LIN1恒为1,图3-9中Q4始终导通,HIN2、LIN2通过PWM控制导通时间调节转速。DIR=0或1,两桥臂下管始终导通,这也为自举电容的快速充电提增加了一条回路,也就是说不管是正转还是反转,当上管关闭时两侧下管可同时提供充电回路,而不是单侧的下管,因为电机阻抗的存在,起主要充电作用的还是单侧的下管。当PWMZ占空比为0时,LIN1、LIN2都为1时,两侧下管同时导通将电机两端接地,这样可以实现电机快速制动。当DIR=1时,HIN、LIN控制信号仿真图和实际波形分别如图3-10和图3-11所示。
全桥驱动原理
5.2.1 全桥驱动原理 全桥驱动又称H桥驱动,下面介绍一下H桥的工作原理: H桥一共有四个臂,分别为B1~B4,每个臂由一个开关控制,示例中为三极管Q1~Q4。 如果让Q1、Q2导通Q3、Q4关断,如图5-8所示,此时电流将会流经Q1、负载、Q2组成的回路,电机正转。 图5-8 B1、B2工作时的H桥电路简图图5-9 B3、B4工作时的H桥电路简图如果让Q1、Q2关断Q3、Q4导通,如图5-9所示,此时电流将会流经Q3、负载、Q4组成的回路,电机反转。 如果让Q1、Q2关断Q3、Q4也关断,负载Load两端悬空,如图5-10所示,此时电机停转。这样就实现了电机的正转、反转、停止三态控制。 如果让Q1、Q2导通Q3、Q4也导通,那么电流将会流经Q1、Q4组成的回路以及Q2和Q3组成的回路,如图5-11所示,这时桥臂上会出现很大的短路电流。在实际应用时注意避免出现桥臂短路的情况,这会给电路带来很大的危害,严重会烧毁电路
图5-10 B1~B4全部停止工作时的H桥简图图5-11 B1~B4全部工作时的H桥简图 6.2 程序中需要说明的几个问题 在程序中有几个地方不易理解,需要特别说明一下: 首先,小车有没有被训练过是怎么知道的? 在这里利用了一个特殊的Flash单元,语音模型存储区首单元(该示例程序中为0xe000单元)。当Flash在初始化以后,或者在擦除后为0xffff,在成功训练并存储后为0x0055(该值由辨识器自动生成)。这样就可以根据这个单元的值来判断是否经过训练。 其次,为什么已经训练过的系统在重新运行时还要进行模型装载? 在首次训练完成之后,辨识器中保存着训练的模型,但是系统一旦复位辨识器中的模型就会丢失,所以在重新运行时必须把存储在Flash中的语音模型装载到辨识器(RAM)中去。 第三,在转弯时为什么前轮要先做一个反方向的摆动? 这是为了克服车体的限制,由于前轮电机的驱动能力有限,有时会出现前轮偏转不到位的情况,所以在转弯前首先让前轮朝反方向摆动,然后再朝目标方向摆动。这样前轮的摆动范围更大,惯性更大,摆幅也最大,能更好实现转弯。
驱动桥
载重汽车驱动桥设计 摘要 驱动桥作为汽车四大总成之一,它的性能的好坏直接影响整车性能,而对于载重汽车显得尤为重要。当采用大功率发动机输出大的转矩以满足目前载重汽车的快速、重载的高效率、高效益的需要时,必须要搭配一个高效、可靠的驱动桥。所以采用传动效率高的单级减速驱动桥已成为未来重载汽车的发展方向。本文参照传统驱动桥的设计方法进行了载重汽车驱动桥的设计。本文首先确定主要部件的结构型式和主要设计参数;然后参考类似驱动桥的结构,确定出总体设计方案;最后对主,从动锥齿轮,差速器圆锥行星齿轮,半轴齿轮,全浮式半轴和整体式桥壳的强度进行校核以及对支承轴承进行了寿命校核。本文不是采用传统的双曲面锥齿轮作为载重汽车的主减速器而是采用弧齿锥齿轮,希望这能作为一个课题继续研究下去。 关键字:载重汽车驱动桥单级减速桥弧齿锥齿轮
前言 汽车驱动桥位于传动系的末端。其基本功用首先是增扭,降速,改变转矩的传递方向,即增大由传动轴或直接从变速器传来的转矩,并将转矩合理的分配给左右驱动车轮;其次,驱动桥还要承受作用于路面或车身之间的垂直力,纵向力和横向力,以及制动力矩和反作用力矩等。驱动桥一般由主减速器,差速器,车轮传动装置和桥壳组成。 对于重型载货汽车来说,要传递的转矩较乘用车和客车,以及轻型商用车都要大得多,以便能够以较低的成本运输较多的货物,所以选择功率较大的发动机,这就对传动系统有较高的要求,而驱动桥在传动系统中起着举足轻重的作用。随着目前国际上石油价格的上涨,汽车的经济性日益成为人们关心的话题,这不仅仅只对乘用车,对于载货汽车,提高其燃油经济性也是各商用车生产商来提高其产品市场竞争力的一个法宝,因为重型载货汽车所采用的发动机都是大功率,大转矩的,装载质量在十吨以上的载货汽车的发动机,最大功率在140KW以上,最大转矩也在700N·m以上,百公里油耗是一般都在34升左右。为了降低油耗,不仅要在发动机的环节上节油,而且也需要从传动系中减少能量的损失。这就必须在发动机的动力输出之后,在从发动机—传动轴—驱动桥这一动力输送环节中寻找减少能量在传递的过程中的损失。在这一环节中,发动机是动力的输出者,也是整个机器的心脏,而驱动桥则是将动力转化为能量的最终执行者。因此,在发动机相同的情况下,采用性能优良且与发动机匹配性比较高的驱动桥便成了有效节油的措施之一。所以设计新型的驱动桥成为新的课题。 目前国内重型车桥生产企业也主要集中在中信车桥厂、东风襄樊车桥公司、济南桥箱厂、汉德车桥公司、重庆红岩桥厂和安凯车桥厂几家企业。这些企业几乎占到国内重卡车桥90%以上的市场。 设计驱动桥时应当满足如下基本要求: 1)选择适当的主减速比,以保证汽车在给定的条件下具有最佳的动力性和燃油经济性。 2)外廓尺寸小,保证汽车具有足够的离地间隙,以满足通过性的要求。3)齿轮及其他传动件工作平稳,噪声小。4)在各种载荷和转速工况下有较高的传动效率。 5)具有足够的强度和刚度,以承受和传递作用于路面和车架或车身间的各种力和力矩;在此条件下,尽可能降低质量,尤其是簧下质量,减少不平路面的冲击载荷,提高汽车的平顺性。6)与悬架导向机构运动协调。 7)结构简单,加工工艺性好,制造容易,维修,调整方便。
P-N MOS管 H桥驱动原理
P-N MOS管H桥原理 所谓的H桥电路就是控制电机正反转的。下图就是一种简单的H桥电路,它由2个P 型场效应管Q1、Q2与2个N型场效应管Q3、Q3组成,所以它叫P-NMOS管H桥。 桥臂上的4个场效应管相当于四个开关,P型管在栅极为低电平时导通,高电平时关闭;N型管在栅极为高电平时导通,低电平时关闭。场效应管是电压控制型元件,栅极通过的电流几乎为“零”。 正因为这个特点,在连接好下图电路后,控制臂1置高电平(U=VCC)、控制臂2置低电平(U=0)时,Q1、Q4关闭,Q2、Q3导通,电机左端低电平,右端高电平,所以电流沿箭头方向流动。设为电机正转。 高 低 控制臂1置低电平、控制臂2置高电平时,Q2、Q3关闭,Q1、Q4导通,电机左端高电平,右端低电平,所以电流沿箭头方向流动。设为电机反转。 高 低 Liang110034@https://www.360docs.net/doc/609223699.html,
当控制臂1、2均为低电平时,Q1、Q2导通,Q3、Q4关闭,电机两端均为高电平,电机不转; 当控制臂1、2均为高电平时,Q1、Q2关闭,Q3、Q4导通,电机两端均为低电平,电机也不转, 所以,此电路有一个优点就是无论控制臂状态如何(绝不允许悬空状态),H桥都不会出现“共态导通”(短路),很适合我们使用。 (另外还有4个N型场效应管的H桥,内阻更小,有“共态导通”现象,栅极驱动电路较复杂,或用专用驱动芯片,如MC33883,原理基本相似,不再赘述。)下面是由与非门CD4011组成的栅极驱动电路,因为单片机输出电压为0~5V,而我们小车使用的H桥的控制臂需要0V或7.2V电压才能使场效应管完全导通,PWM输入0V或5V 时,栅极驱动电路输出电压为0V或7.2V,前提是CD4011电源电压为7.2V。切记!! 故CD4011仅做“电压放大”之用。之所以用两级与非门是为了与MC33886兼容。 单片机0~5V 0~7.2V 两者结合就是下面的电路:调试时两个PWM输入端其中一个接地,另一个悬空(上拉置1),电机转为正常。监视MOS管温度,如发热立即切断电源检查电路。 CD4011的14引脚接7.2V,7引脚接地。
全桥功率开关驱动电路仿真试验
内燃机测试技术试验 实验 全桥功率开关驱动电路仿真试验 实验学时:2 实验类型:基础型 实验对象:本科生 一.实验目的: 1.了解全桥功率开关驱动电路的工作原理和应用。 2.了解全桥功率开关驱动方式的实现原理和特点。 3.掌握全桥功率开关驱动电路关键元器件选择和电路保护。 二.实验原理及设备说明 1.全桥功率开关驱动电路的工作原理 全桥功率开关驱动电路,又称为H桥驱动电路,其基本原理图如图1所示。形象的说,4个开关或者功率管组成H桥的4条垂直腿,而电机或者负载就是H 中的横杠。通过控制4个开关的导通与截止可以实现负载的正向加电和反向加电,其最广泛的用途就是电机的正反转。H桥驱动电路加电必须是对角线两个开关管同时打开,而半桥臂的上下开关管不能同时打开,否则会造成上下位开关管直接短路,电源直接对地短接,造成瞬态电流过大,开关管损坏。当开关管中的1,4导通时,电流经过开关1-电机-开关4流动,电机向一个方向运动;反之,当开关管中的2,3导通时,电流则经过开关3-电机-开关2流动,电机向相反方向运动。 图1 H桥驱动电路原理
由于全桥电路采用了两高两低四个开关管的方式,对于开关管采用是N型还是P型,可以有多种实现方式。一般来讲,高位开关管采用P型实现,驱动最为简单方便,但是P型开关管最大电流不能太大,因此适合再小功率的电机或负载中使用。上下位管均采用N型开关管实现的话,高位的N型开关管控制实现困难一些,但是最大电流可以较大,因此功率可以比较高。总的来说,全桥电路的实际实现方式必须和负载特性结合起来,选择正确的配置。 全桥驱动电路在汽车中的典型应用为电子节气门,EGR阀,电动座椅,伺服阀等。 2.全桥功率开关驱动方式的实现原理和特点 由前面全桥功率开关驱动原理知道,全桥功率开关主要实现的是负载中的电流正反向流动,在实际应用中,全桥驱动基本上使用在电机等类负载上,而从电机的特性上来讲,除了正反向运动外,另外就是电机的调速特性。按照电机调速的基本原理,可以采用调节电机两端电压来实现,而现在调节电机两段电压的方式基本上采用PWM脉宽调制实现,因此必须对PWM脉宽调制下的驱动方式和电机中的电流有比较清楚的理解。表1为典型的电子节气门全桥驱动芯片TLE6281的控制真值表,图2为和真值表对应的控制波形。 表1 TLE6281全桥驱动芯片真值表
H桥式电机驱动电路
本文摘自:《机器人探索》 一、H桥式电机驱动电路 图4.12中所示为一个典型的直流电机控制电路。电路得名于“H桥式驱动电路”是因为它的形状酷似字母H。4个三极管组成H的4条垂直腿,而电机就是H中的横杠(注意:图4.12及随后的两个图都只是示意图,而不是完整的电路图,其中三极管的驱动电路没有画出来)。 如图所示,H桥式电机驱动电路包括4个三极管和一个电机。要使电机运转,必须导通对角线上的一对三极管。根据不同三极管对的导通情况,电流可能会从左至右或从右至左流过电机,从而控制电机的转向。 图4.12 H桥式电机驱动电路 要使电机运转,必须使对角线上的一对三极管导通。例如,如图4.13所示,当Q1管和Q4管导通时,电流就从电源正极经Q1从左至右穿过电机,然后再经Q4回到电源负极。按图中电流箭头所示,该流向的电流将驱动电机顺时针转动。 当三极管Q1和Q4导通时,电流将从左至右流过电机,从而驱动电机按特定方向转动(电机周围的箭头指示为顺时针方向)。
图4.13 H桥电路驱动电机顺时针转动 图4.14所示为另一对三极管Q2和Q3导通的情况,电流将从右至左流过电机。 当三极管Q2和Q3导通时,电流将从右至左流过电机,从而驱动电机沿另一方向转动(电机周围的箭头表示为逆时针方向)。 图4.14 H桥电路驱动电机逆时针转动 二、使能控制和方向逻辑 驱动电机时,保证H桥上两个同侧的三极管不会同时导通非常重要。如果三极管Q1和Q2同时导通,那么电流就会从正极穿过两个三极管直接回到负极。此时,电路中除了三极管外没有其他任何负载,因此电路
上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏三极管。 基于上述原因,在实际驱动电路中通常要用硬件电路方便地控制三极管的开关。 图4.155所示就是基于这种考虑的改进电路,它在基本H桥电路的基础上增加了4个与门和2个非门。4个与门同一个“使能”导通信号相接,这样,用这一个信号就能控制整个电路的开关。而2个非门通过提供 (与本节前面的示意图一样,一种方向输人,可以保证任何时候在H桥的同侧腿上都只有一个三极管能导通。 图4.15所示也不是一个完整的电路图,特别是图中与门和三极管直接连接是不能正常工作的。) 图4.15 具有使能控制和方向逻辑的H桥电路 采用以上方法,电机的运转就只需要用三个信号控制:两个方向信号和一个使能信号。如果DIR-L信号为0,DIR-R信号为1,并且使能信号是1,那么三极管Q1和Q4导通,电流从左至右流经电机(如图4.16所示);如果DIR-L信号变为1,而DIR-R信号变为0,那么Q2和Q3将导通,电流则反向流过电机。 图4.16 使能信号与方向信号的使用 实际使用的时候,用分立件制作H桥式是很麻烦的,好在现在市面上有很多封装好的H桥集成电路,接上电源、电机和控制信号就可以使用了,在额定的电压和电流内使用非常方便可靠。比如常用的L293D、L298N、TA7257P、SN754410等。 在典型H型驱动电路的基础上,给出了增加两只二极管保护驱动管的改进电路,并对其原理和特点进行了分析和讨论. 驱动电路的性能很大程度上影响整个系统的工作性能。有许多问题需要慎重设计,例如,
汽车驱动桥设计
车辆工程专业课程设计 学院机电工程学院班级 12级车辆工程 姓名黄扬显学号 20120665130 成绩指导老师卢隆辉 设计课题某型轻型货车驱动桥设计 2015 年11 月15 日
整车性能参数(已知) 驱动形式: 6×2后轮 轴距: 3800mm 轮距前/后: 1750/1586mm 整备质量 4310kg 额定载质量: 5000kg 空载时前轴分配轴荷45%,满载时前轴分配轴荷26% 前悬/后悬: 1270/1915mm 最高车速: 110km/h 最大爬坡度: 35% 长宽高: 6985 、2330、 2350 发动机型号: YC4E140—20 最大功率: 99.36kw/3000rmp 最大转矩: 380N·m/1200~1400mm 变速器传动比: 7.7 4.1 2.34 1.51 0.81 倒档传动比: 8.72 轮胎规格: 9.00—20 离地间隙: >280mm
1总体设计 (3) 1.1 非断开式驱动桥 (3) 1.2 断开式驱动桥 (4) 2 主减速器设计 (4) 2.1 主减速器结构方案分析 (4) 2.1.1 螺旋锥齿轮传动 (4) 2.2 主减速器主、从动锥齿轮的支承方案 (5) 2.2.1 主动锥齿轮的支承 (5) 2.2.2 从动锥齿轮的支承 (5) 2.3 主减速器锥齿轮设计 (5) 2.3.1 主减速比i0的确定 (6) 2.3.2 主减速器锥齿轮的主要参数选择 (7) 2.4 主减速器锥齿轮的材料 (8) 2.5 主减速器锥齿轮的强度计算 (9) 2.5.1 单位齿长圆周力 (9) 2.5.2 齿轮弯曲强度 (9) 2.5.3 轮齿接触强度 (10) 2.6 主减速器锥齿轮轴承的设计计算 (10) 2.6.1 锥齿轮齿面上的作用力 (10) 2.6.2 锥齿轮轴承的载荷 (11) 2.6.3 锥齿轮轴承型号的确定 (13) 3 差速器设计 (15) 3.1 差速器结构形式选择 (15) 3.2 普通锥齿轮式差速器齿轮设计 (15) 3.3 差速器齿轮的材料 (17) 3.4 普通锥齿轮式差速器齿轮强度计算 (18) 4 驱动桥壳设计 (19) 4.1 桥壳的结构型式 (19) 4.2 桥壳的受力分析及强度计算 (20) 致谢 (22) 参考文献 (23)
型桥式驱动电路
电动小车的电机驱动及控制 【字体:大中小】来源:凌阳大学计划网站 作者:邱国普 一个电动小车整体的运行性能,首 先取决于它的电池系统和电机驱动系统。 电动小车的驱动系统一般由控制器、功率变换器及电动机三个主要部分组成。 电动小车的驱动不但要求电机驱动系统 具有高转矩重量比、宽调速范围、高可靠 性,而且电机的转矩-转速特性受电源功 率的影响,这就要求驱动具有尽可能宽 的高效率区。我们所使用的电机一般为 直流电机,主要用到永磁直流电机、伺服 电机及步进电机三种。直流电机的控制 很简单,性能出众,直流电源也容易实 现。本文即主要介绍这种直流电机的驱 动及控制。 型桥式驱动电路 H 型桥式驱动电路 1.H 型桥式驱动电路 直流电机驱动电路使用最广泛的就 是H型全桥式电路,这种驱动电路可以 很方便实现直流电机的四象限运行,分 别对应正转、正转制动、反转、反转制动。 它的基本原理图如图1所示。 全桥式驱动电路的4只开关管都工 作在斩波状态,S1、S2为一组,S3、S4 为另一组,两组的状态互补,一组导通则 另一组必须关断。当S1、S2导通时,S3、 S4关断,电机两端加正向电压,可以实 现电机的正转或反转制动;当S3、S4导 通时,S1、S2关断,电机两端为反向电 压,电机反转或正转制动。 在小车动作的过程中,我们要不断 地使电机在四个象限之间切换,即在正 转和反转之间切换,也就是在S1、S2导 通且S3、S4关断,到S1、S2关断且S3、 S4导通,这两种状态之间
转换。在这种 情况下,理论上要求两组控制信号完全 互补,但是,由于实际的开关器件都存在 开通和关断时间,绝对的互补控制逻辑 必然导致上下桥臂直通短路,比如在上 桥臂关断的过程中,下桥臂导通了。这个过程可用图2说明。 因此,为了避免直通 短路且保证各个开关管动作之间的协同 性和同步性,两组控制信号在理论上要 求互为倒相的逻辑关系,而实际上却必须相差一个足够的死区时间,这个矫正过程既可以通过硬件实现,即在上下桥 臂的两组控制信号之间增加延时,也可 以通过软件实现(具体方法参看后文)。 驱动电流不仅可以通过主开关管流通,而且还可以通过续流二极管流通。当电机处于制动状态时,电机便工作在发电状态,转子电流必须通过续流二极管流通,否则电机就会发热,严重时烧毁。 开关管的选择对驱动电路的影响很大,开关管的选择宜遵循以下原则: (1)由于驱动电路是功率输出,要求开关管输出功率较大; (2)开关管的开通 和关断时间应尽可能小; (3)小车使用的电源电压不高,因此开关管的饱和压降应该尽量低。 在实际制作中,我们选用大功率达林顿管TIP122或场效应管IRF530,效果都还不错,为了使电路简化,建议使用集成有桥式电路的电机专用驱动芯片,如L298、LMD18200,性能比较稳定可靠。 由于电机在正常工作时对电源的干扰很大,如果只用一组电源时会影响单片机的正常工作,所以我们选用双电源供电。一组5V给单片机和控制电路供电, 另外一组9V给电机供电。在控制部分和电机驱动部分之间用光耦隔开,以免影响控制部分电源的品质,并在达林顿管的基极加三极管驱动,可以给达林顿管提供足够大的基极电流。图3所示为采用TIP122的驱动电机电路,IOB8口为“0”,IOB9口输入PWM波时,电机正转,通过 改变PWM的占空比可以调节电机的速度。而当IOB9口为“0”,IOB8口输入PWM 波时,电机反转,同样通过改变PWM的占空比来调节电机的速度。