五、托卡马克中的重要问题(磁约束、平衡、加热、第一壁之外)
五、托卡马克中的其他重要问题(磁约束、平衡、加热、
第一壁之外)
1.托卡马克物理发展的重要点
19世纪30年代英国的M.法拉第以及其后的J.J.汤姆孙、J.S.E.汤森德等人相继研究气体放电现象,这实际上是等离子体实验研究的起步时期。
1879年英国的W.克鲁克斯采用“物质第四态”这个名词来描述气体放电管中的电离气体。
美国的I.朗缪尔在1928年首先引入等离子体这个名词,等离子体物理学才正式问世。1929年美国的L.汤克斯和朗缪尔指出了等离子体中电子密度的疏密波(即朗缪尔波)。
对空间等离子体的探索,也在20世纪初开始。1902年英国的亥维赛(发现地球上电离离层的中层,E层,被称为亥维赛层)等为了解释无线电波可以远距离传播的现象,推测地球上空存在着能反射电磁波的电离层。这个假说为英国的E.V.阿普顿用实验证实。
英国的D.R.哈特里(1931)和阿普顿(1932)提出了电离层的折射率公式,并得到磁化等离子体的色散方程。
――――以下与托卡马克密切相关(在高温等离子体书中有对应内容)――――
从20世纪30年代起,磁流体力学等离子体的
速度分布函数服从福克-普朗克方程。1936年给出方程中
1938年苏联的A.A.
方程,即弃去碰撞项的无碰撞方程。朗道碰撞积分和符拉索夫方程的提出,标志着动力论的发端。
1942年瑞典的H.阿尔文指出,当理想导电流体处在磁场中,会产生沿磁力线传播的横波(即阿尔文波)。
印度的S.钱德拉塞卡在1942年提出用试探粒子模型来研究弛豫过程。
1946年朗道证明当朗缪尔波传播时,共振电子会吸收波的能量造成波衰减,这称为朗道阻尼。朗道的这个理论,开创了等离子体中波和粒子相互作用和微观不稳定性这些新的研究领域。
从1935年延续至1952年,苏联的H.H.博戈留博夫、英国的
刘维定理出发,得到了不封闭的方程组系列,名为BBGKY链
索夫方程等,这给等离子体动力论奠定了理论基础。
1950年以后,因为英、美、苏等国开始大力研究受控热核反应,促使等离
子体物理蓬勃发展。热核反应的概念最早出现于1929年(前面已涉及)
1957年英国的J.D.劳孙提出受控热核反应实现能量增益的条件,即劳孙判
据。
50年代以来已建成了一批受控聚变的实验装置,如美国的仿星器和磁镜以及
苏联的托卡马克,这三种是磁约束热核聚变实验装置。
60年代后又建立一批激光惯性约束聚变实验装置。
环状磁约束等离子体的平衡问题由苏联的V.D.沙弗拉诺夫等解决。
美国的M.克鲁斯卡和沙弗拉诺夫导出了最重要的一种等离子体不稳定性,
即扭曲不稳定性的判据。
1958年美国的I.B.伯恩斯坦等提出分析宏观不稳定性的能量原理。
处在环状磁场中的等离子体的输运系数首先由联邦德国的D.普菲尔施等
作了研究(1962),他们给出在密度较大区的扩散系数,苏联的A.A.加列耶夫等
给出了密度较小区的扩散系散(1967),这一理论适用于托卡马克这类环状磁约
束等离子体中的输运过程被命名为新经典理论。
2.托卡马克等离子体不稳定性
(1)等离体不稳定性概述
一个力学系统处于力学平衡状态(总的受力为零)时,如受到一个小扰动力的
作用、就会等离子体偏离平衡态(plasma空间位置、粒子速度分布)。
扰动分类
在平衡态附近,扰动随时间的变化一般分成三种情况
--扰动幅度随时间而减小,即阻尼扰动(秋千);
--扰动辐度不随时间变化,即稳定波动(理想秋千);
--扰动的辐度随时间而增大,即不稳定扰动,或称不稳定性.
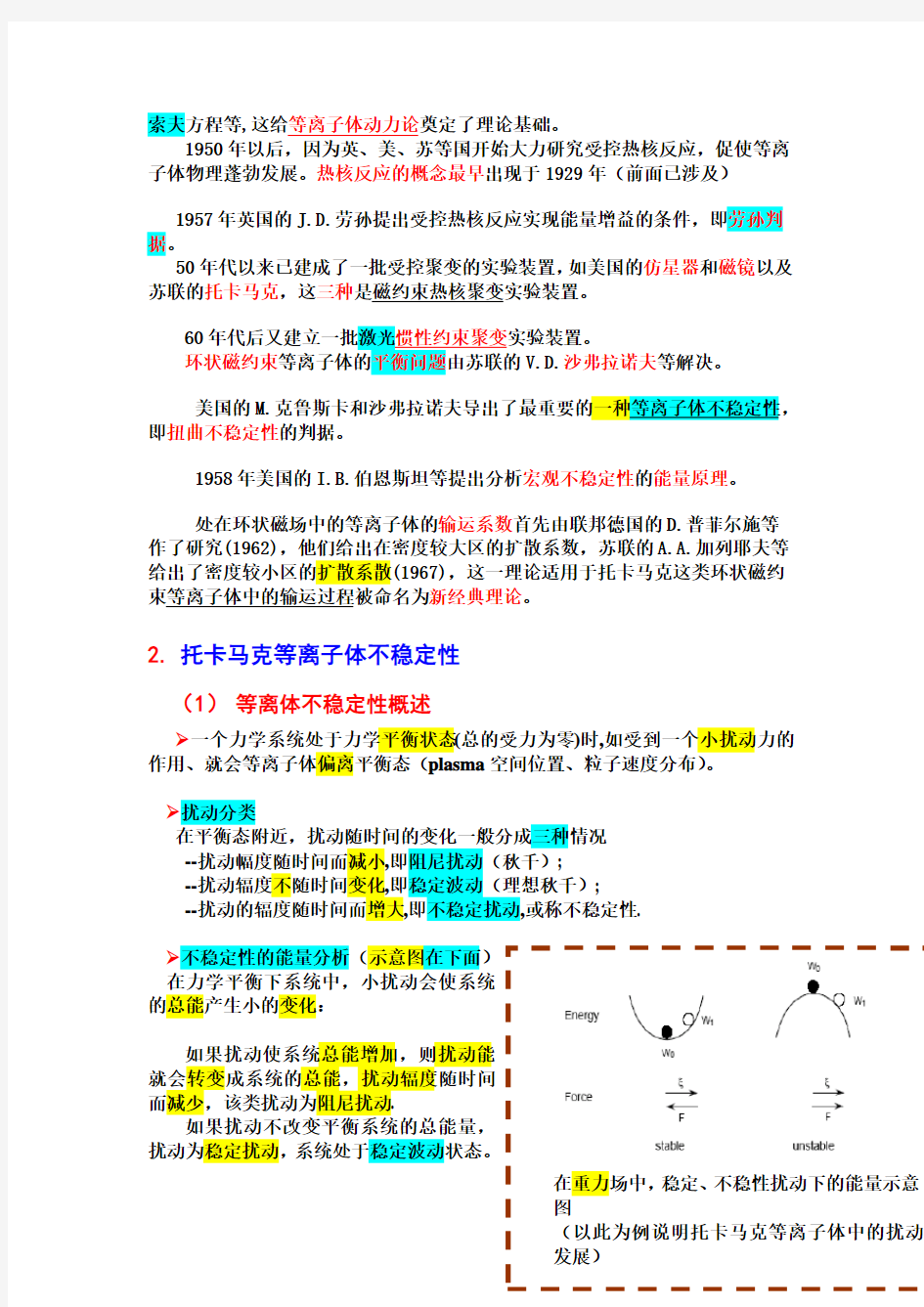
不稳定性的能量分析(示意图在下面)
在力学平衡下系统中,小扰动会使系统
的总能产生小的变化:
如果扰动使系统总能增加,则扰动能
就会转变成系统的总能,扰动辐度随时间
而减少,该类扰动为阻尼扰动.
如果扰动不改变平衡系统的总能量,
扰动为稳定扰动,系统处于稳定波动状态。
在重力场中,稳定、不稳性扰动下的能量示意
图
扰动使系统进入更低的能量状态,同时系统把一部份能量传递给扰动,扰动由此随时间增长,成为不稳定扰动。
不稳定性分类
等离子体不稳定性分为宏观不稳定性及微观不稳定性两类。
(2)宏观不稳定性
(a)定义:
凡是发展的区域远大于粒子的回旋半径和德拜长度等微观尺度的不稳定性,统称为宏观不稳定性。
(b)特性、影响:
宏观不稳定性会造成等离子体大范围的扰动,对平衡具有严重破坏作用。
(c)宏观不稳定性的描述方法:
托卡马克的宏观不稳定性主要决定于等离子体参数、托卡马克电磁场的空间分布,可以将等离子体作为流体处理,由于等离子体在磁场中运动,其性质和描述方法不同于一般的流体。
在流体力学的框架下,托卡马克等离子体粒子体系被视为一种电磁相互作用起主导的流体,通常称为磁流体或电磁流体力学(magnetohydrodynamics MHD)
(附:MHD的应用范围:等离子体的平衡、宏观不稳定性和冷等离子体中的波)
(d)Tokamak中主要的磁流体不稳定性分类
由不稳定增长速率区分
――IMHD不稳定性(Idea MHD,不考虑等离子体电阻,阻尼小,不
稳定幅度增长快)
↙外kink (扭曲)模;
↙内kink (扭曲)模;
↙Exchange (交换)模;
↙Ballooning(气泡)模;
――电阻MHD不稳定性(考虑等离子体电阻,有阻尼,不稳定性幅
度增长慢)
↙Tearing(撕裂)模,
↙Neo-classical Tearing Mode (NTM)
――介于IMHD和耗散MHD之间的模
↙RWM (Resistance Wall Mode, 电阻壁)模
由不稳定性发生的位置区分
内部模:发生在托卡马克等离子体内部,如大部分撕裂模和内扭曲模。
表面模:等离子体外部区域,如外部扭曲模、仅发生在坏曲率区的气球模。
按扰动的电磁性质分类
--静电型;
--电磁型;
---静电、电磁混合型.
(e)磁流体不稳定性的举例简介
外扭曲模――External Kink mode or External Kink instability (外扭曲不稳定性)
――名称来源――
顾名思义,这种不稳定性由等离子体柱扭曲产生。
――不稳定的增长――
在受扰动产生等离子体柱扭曲后
(参见右图),扭曲内侧的磁力大于
外侧的磁力。在磁压力差的作用下,
扭曲幅度增大。
因此,等离子体柱不稳定,朝着
放电室壁的宏观横向移动。
――壁对不稳定性的稳定作用――
当等离子体向壁运动时,在壁上产
生涡流,由楞次作用知,涡流的作用
阻止等离子体的冲向壁的扭曲运动。
当托卡马克壁为带电率无穷大的
理想导体时,扭曲模可以被稳定。
托卡马克壁不能使用高导电率的
良导体(铜、银等),涡流实际上在具
有一定电阻的电阻壁上流动,此时扭
曲模不能被完全稳定,但其增长率被
降低,成为电阻壁模(Resistive Wall
Mode,RWM )
内扭曲模(Internal Kink mode)
发生在托卡马克芯部(托卡马克内部),安全因子q为小值区的扭曲模。V
扭曲不稳定性的驱动机理
托卡马克等离子体的磁场(a)、电流(b)、安全因子(c)、
压力梯度(d)径向分布
上图:平衡位置下的托卡马克芯部位形
下图:内扭曲不稳定性造成芯部等离子体移动、倾斜
内扭曲模没有直接导致等离子体撞壁,但产生等离子体向外径向输运,降低能量约束。
Sawtooth, Sawteeth(锯齿,顾名思义,波动信号为锯齿状) ――锯齿的基本特性(如下图所示)
――锯齿的产生机理(相对复杂,1974年第一次发现;1986年仍然三种模型解释;
现在仍不完全清晰地理解。)
大体上讲,sawteeth 与内扭曲不稳定性爆发有关,发生在q=1磁面内。 ――锯齿的影响
在中心区造成向外径向输运,对能量约束的影响较温和;
有益的效果:
将杂质驱赶出中心区,并降低辐射损失。
但通过与其他不稳定模式的耦合,可以间接造成能量约束下降。
与sawteeth 耦合的其他不稳定模式有:
sawteeth 产生促进新经典撕裂模增长的seed island ;
可以和锁模(locked mode ),边缘局域模(Edge Localized Mode ,ELM ),
外部扭曲模耦合
锯齿波的存在区域 锯齿波爆发前后的q 值径向分布 不同半径处锯齿波特征
r mixing 在q (r )=1的磁面外
r inv 在q (r )=1的磁面附近
锯齿波爆发前后的电子温度径向分布
注意:在锯齿波爆发后,等离子体能量
向外输运,r inv ,r mix 之间的电子温
度增加
撕裂模(Tearing mode )
当托卡马克等离子体β [等离子体压强P 与磁场压强(022μB )之比]值增加时,由电流、压强梯度驱动撕裂模,造成磁面撕裂(tearing )、重连(reconention ),由此产生磁岛(参见下图)。
――新经典撕裂模的产生:磁岛――:
在新经典MHD 理论描述中,新经典撕裂模(Neo -Tearing Mode ,NTM )的激发需要种子磁岛(seed magnetic island ),这些种子磁岛由其他不稳定性(如边界局域模,Edge Localized Mode ,ELM 、湍流可以产生seed island )激发。 上图:在完全导电的MHD 描述
如上图:磁岛存在时,带电粒子可以
沿磁B 线,由磁岛内缘迅速运动到外
Seed island激发撕裂模,撕裂模导致进一步驱动磁岛宽度增长,宽度增加到一定值后饱和,此时磁岛稳定地存在于托卡马克等离子体中。
―――磁岛的影响――:
磁岛不仅增加粒子输运、降低约束,还可以驱动IMHD不稳定性,由此造成放电熄灭的大破裂。
在磁岛区,等离子体压力径向分布变平,自举电流降低;
――NTM的稳定原理、方法―――:
采用ECCD在磁岛区重建等离子体电流(在磁岛区、带电粒子沿B线来回运动,没有大环方向的电流),降低磁岛宽度,降低粒子输运,提高能量约束。――――――――――――――――――――――――――――――――――附:Disruptive instability (破裂不稳定性)
――破裂不稳定性定义――
当等离子体密度、电流、beta值等达到
临界值时,磁流体不稳定性以较快的增长率、
在托卡马克中大的区域中发展,等离子体等
离子体撞壁,等离子体约束受到突然破坏,,
电流在很短的时间内降到很低值(甚至为
零)。
根据破裂不稳定性的爆发位置,可分为
内破裂(如sawtooth所导致)和外破裂(如
external kink mode导致)。
――破裂不稳定性的影响:――
破裂不稳定性的发生限制了等离子体参数的进一步提高。
此时大量粒子输运至第一壁,对第一壁产生破坏;在装置构件上产生大的机械应力和热应力。
典型的破裂不稳定性有:扭曲模,撕裂模等。
此外,垂直破裂事件(Vertical Displacement Event, VDE)也可造成破裂(在托卡马克反馈控制中已讲授)。――――――――――――――――――――――――――――――――――
(3)微观不稳定性
仅在微观尺度(小于粒子回旋半径)上发展的不稳定性则称为微观不稳定性。
微观不稳定性的起因有多种。一种来自空间不均匀性,例如密度、温度、磁场梯度,这会引起漂移,有可能激发起不稳定性。
另一种来自速度空间不均匀性,如速度、温度、压力的各向异性。
3.托卡马克等离子体的输运、放电模式
导言1: 输运--粒子、能量由一个空间区域运动到另一个空间区域;
导言2:输运意义――横越磁场(小半径)的粒子输运、能量输运磁约束核聚变的核心物理问题之一,它影响装置
的能量约束时间。
(1)经典输运
采用圆柱形几何结构,不考虑MHD不稳定性,不考虑不均匀磁场造成的粒子漂移。
最初,人们认为托卡马克装置中的等离子体能量损失主要来源于粒子之间的库仑碰撞与输运过程。
对于电子,主要的能量损失来自电子的辐射损失、电子对流输运损失和电子热导损失;
对于离子,主要的能量来自电荷交换损失、离子对流输运损失和离子热导损失。
由于这些损失都是以库仑碰撞为基本机制,都可以利用经典输运理论得到解释
(2)新经典输运(Neo-classical transport)
在环形磁约束系统中,由于磁场强度的固有不均匀性及磁力线的旋转变换,沿螺旋磁力线运动的带电粒子分为两类:(1)在部分环形之间运动的捕获粒子;(2)沿整个环运动的穿行粒子。
考虑了捕获粒子效应、非均匀磁场梯度漂移,修正后的经典碰撞等离子体输运理论叫新经典输运。
推导得到的新经典输运速率高于(梯度漂移)经典输运速率,但经常小于实验测量值。
由新经典输运理论成功地预言了自举电流。
(3)反常输运――经典输运理论遇到的问题
根据目前托卡马克等的实验结果,某些输运系数(如电子热导等)经常明显大于新经典理论的结果。
凡是碰撞理论(经典、新经典理论,所谓正常输运过程的理论)无法解释的输运现象就称为反常输运。
目前流行的观点是:反常输运是主要由湍流等集体运动(非两体碰撞)所主导的输运。
(4)托卡马克等离子体中湍流
湍流定义:
湍流是一种高度复杂的三维非稳态、带旋转的不规则流动。在湍流中流体的各种物理参数,如速度、压力、温度等都随时间与空间发生随机的变化。
从物理结构上说,可以把湍流看成是由各种不同尺度的涡旋叠合而成的流动,这些漩涡的大小及旋转轴的方向分布是随机的。
生活中湍流例子
翻腾的烟急流流动受阻后的水
托卡马克等离子体湍流中产生
空间不均匀性(温度、密度)激发的各种低频漂移波,由电磁模不稳定增长导致的磁面破裂等可以产生微观湍流。
托卡马克等离子体湍流的影响
湍流的EXB 涡旋运动使粒子在不同的区域间运动,增强了等离子体径向输运,降低了能量约束时间。
湍流的造成的反常输运机制比正常输运的库仑碰撞机制复杂;
数值计算需要大型计算机;
上世纪80年代,由等离子体物理学家A. Hasegawa 和 K. Mima 建立的湍流数学方程已用于大气、海洋的气旋的分析。
E
E
例子:漂移波产生湍流(涡旋)分析
托卡马克中总是存在空间不均匀性,激发各种低频漂移波,对空间电场产生扰动,形成如图所示的电位分布。
在局域电势垒区(局部中心电势最高,在图中标记为δφ>0,),电场E 指向外部低
(5)输运垒(Transport Barrier)、产生机制,H mode
输运垒定义――
在某种运行条件下(例如,H模),在陡的压强梯度空间,存在一个低输运区域,这样的区域被称为输运垒。
内、外部输运垒――
输运垒的产生与影响(即输运降低的物理原因)――
导言:
输运势垒的产生与剪切B
E?漂移密切相关,虽然不是产生势垒的唯一条件,但是最重要的条件,存在剪切B
E?漂移可以促使输运势垒的产生。-――――――――――――――――――――――――
E
E
产生湍流涡旋的EXB。此处E由微观不稳定性扰动产生。
产生形成带状流(zonal flow)的剪切EXB 极向漂移。
此处E由等离子体平衡决定,主要沿径。剪切EXB漂移
即在托卡马克的不同小半径处,B
E?漂移方向改变,即剪切(原因B、E改变方向)。
r
E
磁面
磁力线
剪切B
E?漂移的意义
在最近十年的聚变研究中,一个成功的例子是剪切B
E?漂移稳定湍流模型的建立,由此解释了磁约束装置中输运垒,弄清了托卡马克高约束模式的机理。-――――――――――――――――――――――――――B
E?漂移与输运之间关系――
――刚性B
E?漂移――
在托卡马克中,没有剪切的B
E?,造成等离子体整体刚性输运,可以降低新经典输运损失(新经典输运理论考虑沿粒子轨道运动时的输运损失,B
E?造成的整体刚性运动主要沿极向,可以降低沿径向的输运速率。)
在托卡马克中,如果各处的B
E?漂移速度、方向相同(即等离子体整体刚性漂移),B
E?漂移不仅对湍流没有抑制作用,而且漂移运动还可能成为激发不稳定性的自由能量源,由此增加输运损失。
――剪切B
E?漂移的作用――
当B
E?漂移存在剪切时,以集体运动为特征的等离子体不稳定振荡不能由E?漂移获取能量,微观不稳定性被削弱――(产生湍流的驱动源被削弱)。
B
在径向,湍流发展仍然需要一定的相干度,剪切B
E?漂移(带状流)可以干扰这种相干度,抑制湍流发展。
――B
E?漂移的剪切来源――
显然源于E或B的剪切;
――剪切(源于磁剪切)B
E?漂移:内输运垒(internal transport barrier)――
由前面的讨论知,磁剪切源于等离子体电流产生的极向磁场;
在通常的等离子体电流分布下,极向场随小半径增加单调减小,安全因子随小半径增加单调增加(参见右图);
此时,磁剪切为正(dr
/
=>0)。
)
(
r
dq
q
s/
在一般等离子体电流分布下的q(r)
负磁剪切的产生和影响: 采用电子回旋共振电流驱动(ECCR )方法,在off -axis 处局域驱动最大电流,形成所谓中空(hollow )等离子体电流径向分布(参见下图),中心极向场低,在off -aixs 处极向场高;
在零剪切处,湍流增长率很小。由此知,湍流不能在整个空间发展,整体结构被破坏,;
此时,在负剪切区(接近zero 的弱剪切区)形成所谓的“内输运垒”,阻止粒子、能量由中心向外输运。
附1:内部输运垒的首次发现
负剪切不是产生内部输运垒的充分条件,还需要放电功率超过临界值。
附2:内部输运垒的首次发现
1988年,在JET 上发现内部输运垒。
负磁剪切区的湍
流流场;涡旋区域
收缩。 内部输运垒区 注意:内部输运垒产生于弱(zero )剪切区。 在通常的托卡马克运行中,存在磁剪切,
但不能产生输运垒。输运垒的产生需要剪切区。剪切由正变负,也称为反剪切
(reversed shear )。
时,湍流流场的计算结果如下图所示(注意结果动画超链接(注意在零剪切处,湍流增长率很小。由此知,湍流不能在整个
内部有剪切流时,湍流被抑制在小区域内,粒子输运降低。在弱剪切区(下图S=0.1),等离子体形成极向带状流
zonal flow ) 输运系数降低。
potential lines without ITB.mpeg potentiallines with ITB.mpeg 在有内部输运垒的情况下,安全因子q 、电子(离子)温度,输运系数的径向分布的测量结果(参见下图,对应等离子体hollow 电流径向分布 ): ――外部输运垒·H mode ――
H mode 的发现
? 早期人们采用高能中性束或射频波加热来提高等离子体温度,发现能量约束时间随加热功率增加而明显下降,in
E P 1∝
τ。这是所谓的低约束模(Low mode , L mode )放电(如下图所示)。
上图中各符号的意义:Er---径向电场;χi 、χe ―――离子、电
子输运系数测量值;χi NC ――离子非经典输运系数计算值。等离子体内部出现输运系数最小区,表明存在输运垒。
能量约束时间随功率的变化
↙约束随功率变坏的原因:采用高能中性束、射频辅助加热后,所形成的高能离子的速度并不单一,速度的分布具有一定的宽度。这些高能离子使等离子体的速度分布受到影响,在速度较大处又出现一个峰值而形成双峰分布。如果等离子体中存在有波,其相速度恰在升起峰值的上升区域,由于朗道增长,波的幅度也随之加大,因而径向输运增加,能量约束时间降低。―――(原因之一)
↙当人们对低约束模感到失望时,1982年西德人在ASDEX上取得重大进展:观察到当辅助加热功率超过一定阈值时,等离子体约束性能突然增加,其能量约束时间与L模约束定标相比可增加约1倍,等离子体约束具有很多新的特点,这就是所谓的H-模(High mode)放电,H-模的发现对当时的聚变界是一个巨大的鼓舞。――――Wagner F et al Phys. Rev. Lett. 49 1408(1982)――――(附:ASDEX 采用磁偏滤器,并进行了壁处理,杂质得到了控制。)
不同放电模式下能量约束时间随功率的变化。不同放电模式下等离子体压强的径向分布。
?ASDEX有磁偏滤器,但后来人们在孔栏位形等多种条件下也发现了H mode。
H-模的解释
已有大量关于H模机制的研究,普遍承认的一个理论模型是:
高功率加热下,等离子体边缘形成输运势垒;
输运垒的产生与边缘区的径向电场相关:
当加热功率接近L-H模转换的阈值功率时,边缘区等离子体密度梯度增大,径向电场E 增加,并且对应的EXB漂移存在剪切(dE/dr增加) 实验观察到约束改善是从边缘开始。
第四章 非线性规划1-约束极值问题
第四章 非线性规划 ???? ???? 无约束最优化问题线性规划约束最优化问题非线性规划 ?? ?凸规划约束最优化问题非凸规划 ?? ?直接解法约束最优化问题求解方法间接解法 间接解法是将约束优化问题转化为一系列无约束优化问题来解的一种方法。由于这类方法可以选用有效的无约束优化方法,且易于处理同时具有不等式约束和等式约束的问题,因而在工程优化中得到了广泛的应用。 直接解法是在满足不等式约束的可行设汁区域内直接按索问题的约束最优解。 第一节 目标函数的约束极值问题 所谓约束优化设计问题的最优性条件.就是指在满足等式和不等式约束条件下,其目标函数值最小的点必须满足的条件,须注意的是,这只是对约束的局部最优解而言。 对于带有约束条件的目标函数,其求最优解的过程可归结为: 一、约束与方向的定义 一)起作用约束与松弛约束 对于一个不等式约束()0g X ≤来说,如果所讨论的设计点() k X 使该约束()0g X =(或 者说() k X 当时正处在该约束的边界上)时,则称这个约束是() k X 点的一个起作用约束或紧约 束,而其他满足()0g X <的约束称为松弛约束。
冗余约束 40g ≤ 当一个设计点同时有几个约束起作用时,即可定义起作用约束集合为 {}()()()|()0,1,2, ,k k u I X u g X u m === 其意义是对() k X 点此时所有起作用约束下标的集合。 二)冗余约束 如果一个不等式约束条件的约束面(即()0g X =)对可行域的大小不发生影 响,或是约束面不与可行域D 相交,即此约束称为冗余约束。 三)可行方向 可行方向:一个设计点()k X 在可行域内,沿某一个方向S 移动,仍可得到一个属于可行域的新点,则称该方向为可行方向。 1)设计点为自由点 设计点() k X 在可行域内是一个自由点,在各个方 向上都可以作出移动得到新点仍属于可行域,如图所示。 2)设计点为约束边界点 当设计点()k X 处于起作用约束i g 上时,它的移动就会受到可行性的限制。此时,()k X 点的可行方向S 必满足条件: ()0T k i S g X ?≤ (解释:()()cos ,()T k k T k i i i S g X S g X S g X ?=??,,()90T k i S g X ?≥?)) 当,()90T k i S g X ?=?时,方向S 是约束函数i g 在()k X 点处的切线方向,即()0T k i S g X ?=。 当某个设计点x 同时有几个约束起作用时(如
磁约束
一. 概述 众所周知,以一定速度进入均匀磁场中的带电粒子作螺旋线运动。进入非均匀磁场中的带电粒子将如何运动呢?现以典型的喇叭形磁场为例,用一种简明的方法进行分析,阐明了磁约束的基本原理及其在核聚变中的重要应用。 二. 带电粒子在喇叭形磁场中的运动 常见的典型的喇叭形磁场如图15-1所示。 为了方便起见,设图15-1示的磁场是关于Z 轴对称的空间缓变的;喇叭形磁场,它可用下表示 其中 为常数, 和 分别为柱坐标系中Z 轴和径向方向的单位矢量,a 是一个微小的参数,它表达了 随Z 和r 的缓慢变化。 电荷为q ,质量为m 的粒子以一定速度 (假定 之大小远小于真空中的光速) 进入图15-1所示的磁场中,它将如何运动呢? 现将带电粒子的速度分解为平行于的纵向分量与垂直于的横向分量 。 带电粒子在 的z 分量 作用下,类似 于在均匀磁场中的带电粒子作螺旋线运动。但由于 随Z 增大而增强,其回旋
半径将逐渐减小,因此带电粒 子的轨道是一条会聚螺旋线,如图15-2 所示。 磁场的径向分量虽小,但对带电粒子的运动产生十分重要的作用,出现了十分有趣的特征。由径向磁场产生的洛仑兹力为: (2) 其中使带电粒子的横向速度之大小增加,因由 于的空间缓变,甚微,所以为圆柱坐标系中 方向的单位矢量)。 (2)式中第二项以表示,即: (3) (3)式所示之分力与方向相反,将使减小。可见磁场使带电粒 子的增加,减小。然而在稳定的磁场中运动的带电粒子的总动能是不变的。即: 常数(4) 从(4)式出发,由的变化可找出带电粒子横向速度的变化规律。今将(4)式对时间求导数得:(5) 其中
磁约束核聚变关键能量转换部件的磁流体力学探究
磁约束核聚变关键能量转换部件的磁流体力学探究 【摘要】新科技革命的到来,现代工业化生活所耗费的能量大部分来源于不可再生能源,这些能源非常有限,一旦耗尽,世界将会面临一场关于能源短缺的浩劫。近年来我国的磁约束核聚变用于工程技术研究和物力体力学研究方面取得了相当可观的成绩,该技术在很大程度上可以解决能源危机问题。本文详细阐述了磁约束核聚变的相关概念,分析了磁约束聚变与关键能量转换部件装置类别,重点介绍了核聚变反应堆以及磁流体力学实践运用。 【关键词】磁约束核聚变;磁流体力学;关键能量转换部件 0.引言 当今世界,无论是工业生产还是日常生活,所用到的能源绝大部分是来源于不可再生的化石燃料资源,这些不可再生的资源非常有限,现今许多国家正面临严峻的能源短缺问题。因此,核聚变能的运用在解决能源危机问题方面意义重大。磁约束核聚变作为可控核聚变的种类之一,在克服核聚变反应物的缺陷时又能够保证散发出强大的能源供应,目前世界各国相继投入了对磁约束核聚变的研究,陆续建立了不同磁场位置和形体的实验装置,重点研究磁约束核聚变关键能量转换部件的磁流体力学。 1.磁约束核聚变概念分析 磁约束核聚变是一种结合磁场引力和高热等离子体能量来实现核聚变反应的高科技,这个步骤的具体做法是,首先对已知燃料进行加热处理,让燃料变成等离子体形态,然后利用磁场引力的作用,抑制住高热等离子中的带电粒子,让带电粒子呈现螺旋状线性运动,最后对等离子体进行再次高温加热,直到发生核聚变反应。 2.磁约束聚变与装置类别分析 在20世纪六、七十年代,磁约束等离子燃烧核聚变研究已经经过了多次尝试和研究,依然取得了许多突破性的进展,世界各国相继创建了许多种功能各异、花样繁多的用于实现磁约束等离子燃烧核聚变反应的科学实验装置,主要有托卡马克、多极场、仿星器、磁场镜等不同磁场位形的装置[1]。这些高科技试验装置的创建目的就是为了研究使磁约束等离子体的稳定性发生改变以及能量损耗的形成原理,并力图寻找出克服高温等离子体不稳定性和能量损耗的方法。为实现磁约束核聚变反应常用的装置是托卡马克装置,这个装置主要起到引流、等离子高温加热等作用,与其它装置相比较而言,托卡马克污染较少、安全性更高、运行稳定等优势。托卡马克是一种圆状环形强力磁场装置(如图1所示),由于其结构造型特殊,圆状环形的强力磁场以及极向磁场的相对稳定作用,使得高温等离子体的稳定性加强,抑制高温等离子体中带电粒子的消耗,并且通过高温等离子体中的带电粒子实现对等离子体的抑制、稳定以及运动方向等方面的控制,采用中性束摄入以及高温频率波加热装置对等离子体进行控制,将等离子体中带电粒子电流维持在未消耗状态。目前托卡马克已经成为磁约束反应研究的重点使用装置,并将成为最有可能实现核聚变反应走向商业化运作的有效途径。
等离子体的磁约束原理
等离子体的磁约束原理 张玉萍 在辉光放电、弧光放电的阳极柱里,气体处在高度电离状态,但是其中正、负电荷密度几乎相等,这时的系统同普通的气体有明显的区别,1929年,美国的朗默尔(Langmuir)将它取名为“plasma”,译名为“等离子体”。在热核反应的高温(约在几百万开甚至一亿开左右)下,物质处于等离子态,但在热核反应的高温下,任何固体材料的容器早已熔毁,而且散热的速度随温度的升高而急剧增加。目前在大多数受控热核反应的实验装置里用磁场来约束等离子体,使之脱离器壁并限制它的热导。下面简单介绍等离子体磁约束的原理。 我们知道,带电粒子的速度v和磁感强度B成任意夹角时,此带电粒子在磁场中作螺旋线运动,且回旋半径R与磁感强度B成反比,磁场越强,半径越小,这样一来,在很强的磁场中,每个带电粒子的运动便被约束在一根磁感线附近的很小的范围内(右图),也就是说,带电粒子回旋轨道的中心(也叫引导中心)只能沿磁感线纵向移动,而不能横越它,只有当粒子发生碰撞时,引导中心才能由一根磁感线跳到另一根磁感线,因此,强磁场可以使带电粒子的横向输运过程(如扩散、热导)受到很大的限制。
实际问题中,例如受控热核反应,不仅要求引导中心受到横向约束,也希望有纵向约束。下述磁镜装置便能限制引导中心的纵向移动。如上图(a)所示,两个电流方向相同的线圈产生中央弱两端强的不均匀磁场,当处于中间区域的带电粒子沿着z轴向右运动时,设粒子带正电荷q, 速度v沿z轴,如图5-2(b)所示,粒子受到洛伦兹力 B v? q作用,使粒子向着如上图(b)所 示方向(垂直屏幕向里)偏转,可见粒子将获得绕轴旋转的运动速度θv(图中用?代表其方向),随着粒子分速度θv的出现,又将受到洛伦兹力F的作用,其径向分量r F使粒子向轴线偏转,轴
西北工业大学机械原理课后标准答案第11章
第11章课后参考答案 11-1在给定轮系主动轮的转向后,可用什么方法来确定定轴轮系从动轮的转向?周转轮系中主、从动件的转向关系又用什么方法来确定? 答:参考教材216~218页。 11-2如何划分一个复合轮系的定轴轮系部分和各基本周转轮系部分?在图示的轮系中,既然构件5作为行星架被划归在周转轮系部分中,在计算周转轮系部分的 传动比时,是否应把齿轮5的齿数,Z5计入? 答:划分一个复合轮系的定轴轮系部分和各基本周转轮系部 分关键是要把其中的周转轮系部分划出来,周转轮糸的特点 是具有行星轮和行星架,所以要先找到轮系中的行星轮,然 后找出行星架。每一行星架,连同行星架上的行星轮和与行 星轮相啮合的太阳轮就组成一个基本周转轮糸。在一个复合 轮系中可能包括有几个基本周转轮系(一般每一个行星架就对应一个基本周转轮系),当将这些周转轮一一找出之后.剩下的便是定轴轮糸部分了。 在图示的轮系中.虽然构件5作为行星架被划归在周转轮系部分中,但在计算周转轮系部分的传动比时.不应把齿轮5的齿数计入。 11-3在计算行星轮系的传动比时,式i mH=1-i H mn只有在什么情况下才是正确的? 答在行星轮系,设固定轮为n, 即ωn=0时, i mH=1-i H mn公式才是正确的。 11-4在计算周转轮系的传动比时,式i H mn=(n m-n H)/(n n-n H)中的i H mn是什么传动比,如何确定其大小和“±”号? 答: i H mn是在根据相对运动原理,设给原周转轮系加上一个公共角速度“-ωH”。使之绕行星架的固定轴线回转,这时各构件之间的相对运动仍将保持不变,而行星架的角速度为0,即行星架“静止不动”了.于是周转轮系转化成了定轴轮系,这个转化轮系的传动比,其大小可以用i H mn=(n m-n H)/(n n-n H)中的i H mn公式计算;方向由“±”号确定,但注意,它由在转化轮系中m. n两轮的转向关系来确定。11-5用转化轮系法计算行星轮系效率的理论基础是什么?为什么说当行星轮系为高速时,用它来计算行星轮系的效率会带来较大的误差? 答: 用转化轮系法计算行星轮系效率的理论基础是行星轮系的转化轮系和原行 ”。经过这样星轮系的差别,仅在于给整个行星轮系附加了一个公共角速度“-ω H 的转化之后,各构件之间的相对运动没有改变,而轮系各运动副中的作用力(当不考虑构件回转的离心惯性力时)以及摩擦因数也不会改变。因而行星轮系与其转化轮系中的摩擦损失功率P H f应相等。 用转化轮系法计算行星轮系效率没有考虑由于加工、安装和使用情况等的不
11【项目十一、气动剪切机工作原理】
【项目十一、气动剪切机工作原理】 项目目标: 1、掌握气压传动系统的工作原理及系统组成; 2、掌握气压传动系统符号、作用。 任务引入: 气压传动是以空气为工作介质进行能量传递的一种传动形式。本任务以气动剪切机气压传动系统为例,介绍气压传动系统的工作原理、系统组成及相关基础知识。 任务描述: 如图11-1所示为气动剪切机工作原理图,图示位置为剪切前的预备状态,其工作过程如下: 空气压缩机1产生的压缩空气→后冷却器2 →油水分离器3 →贮气罐4 →空气过滤器5 →调压阀6 →油雾器7 →气控换向阀9 →气缸10,此时换向阀A腔的压缩空气将阀芯推到上位,使气缸上腔充压,活塞处于下位,剪切机的剪口张开,处于预备状态。 当送料机构将工料11送入剪切机并到达规定位置时,工料将行程阀8的阀芯向右推,换向阀A腔经行程阀8与大气相通,换向阀阀芯在弹簧的作用下移到下位,将气缸上腔与大 图11-1 气动剪切机工作原理 1-空气压缩机 2-后冷却器 3-油水分离器 4-贮气罐 5-空气过滤器 6-调压阀 7-油雾器 8-行程阀 9-气控换向阀 10-气缸 11-工料
气相通,下腔与压缩空气连通。此时活塞带动剪刀快速向上运动将工料切下。工料被切下后,即与行程阀脱开,行程阀复位,将排气口封死。换向阀A腔压力上升,阀芯上移,使气路换向。气缸上腔进压缩空气,下腔排气,活塞带动剪刀向下运动,系统又恢复到图示状态,等待第二次进料剪切。 任务实施: 一、气压传动系统的组成 通过气动剪切机工作过程可知,气源装置将电动机的机械能转换为气体的压力能,然后通过气缸将气体的压力能再转换为机械能以推动负载运动,气压传动过程可用如下方框图表 为了实现压缩空气的输送,在气源装置与气缸或气马达之间用管道连接,同时为了实现执行机构所要求的运动,在系统中还设置有各种控制阀及其它辅助设备。所以气压传动系统主要由下列五部分组成: (1)气源装置气源装置是压缩空气的产生装置,其主体部分是空气压缩机(简称空压机)。它将原动机(如电动机)的机械能转换为空气的压力能,并经净化装置净化,为各类气压传动设备提供洁净的压缩空气。 (2)执行元件执行元件是把气体压力能转换成机械能,以驱动工作机构的元件。一般指作直线运动或摆动的气压缸或作旋转运动的气压马达。 (3)控制调节元件控制调节元件是对气压系统中气体的压力、流量和流动方向进行控制和调节的元件。例如,溢流阀、节流阀、换向阀等,这些元件的不同组合组成了能够完成不同功能的气压系统。 (4)辅助元件辅助元件是指除以上三种以外的其他装置,例如,过滤器、油雾器、消声器、干燥器和转换器等,它们对保持系统正常、可靠、稳定和持久地工作起着十分重要的作用。 (5)传动介质气压传动系统中所使用的工作介质是空气。 常见气压传动图形符号见表11-1。
机械优化设计-第04章 多维有约束优化方法
第四章:多维有约束优化方法 4.1概述 一、多维有约束问题的数学模型 机械优化设计问题绝大多数是属于多维有约束非线性规划,其数学模型可表示为 式中a i、b i分别为x i的下界和上界。 在求解约束优化问题时,虽然可以利用第三章的无约束优化方法,再加上约束的逻辑判断,使搜索点保持在可行域内逐步逼近约束最优解,但这样处理太复杂,缺乏严格的科学性。因此,出现了一些直接求解约束优化问题的方法,其基本思路也是数值迭代法。目前,约束优化方法虽然不如无约束优化方法那样多而完善,但对求解工程优化问题已有很多较好的方法。 二、多维有约束优化方法的分类 (1)直接法 直接法包括:网格法、分层降维枚举法、复合形法、随机试验法、随机方向法、可变容差法和可行方向法。 (2)间接法 间接法包括:罚函数法、内点罚函数法、外点罚函数法、混合罚函数法、精确罚函数法、广义乘子法、广义简约梯度法和约束变尺度法。 直接法不需要利用目标函数和约束函数的梯度,就可直接利用迭代点和目标函数值的信息来构造搜索方向。间接法要利用目标、约束函数的梯度,其中也包括利用差分来近似梯度的应用。很多约束优化方法是先转变成无约束优化方法来求解。可见,无约束优化方法也是也是约束优化方法的基础。
4.2复合形法 一、方法概述 基本思路:在可行域中选取K个设计点(n+1≤K≤2n)作为初始复合形的顶点。比较各顶点目标函数值的大小,去掉目标函数值最大的顶点(称最坏点),以坏点以外其余各点的中心为映射中心,用坏点的映射点替换该点,构成新的复合形顶点。 反复迭代计算,使复合形不断向最优点移动和收缩,直至收缩到复合形的顶点与形心非常接近,且满足迭代精度要求为止。 初始复合形产生的全部K个顶点必须都在可行域内。 二、初始复合形的产生 复合形法是一种在可行域内收索最优点大直接解法。 (1)确定可行点作为初始复合形的第一个顶点: 式中: 通过调整随机数,使第一个初始点控制在可行域范围内。 (2)产生其余(K-1)个随机点。 (3)将非可行点调入可行域内。 若从第一个点到第个点均在可行域范围内,但第点不在可行域内,采取下列步骤使其调入可行域范围内: (a)先求出已在可行域范围内的q个点的中心: (b)将点向方向推进:=+0.5(-)若推进的点仍不在可行域范围内,则利用上式,使其继续向中心移动,直至新点成为可行点为止。
会切磁瓶探析—磁场位形为磁阱的新型磁约束装置
Nuclear Science and Technology 核科学与技术, 2016, 4(1), 7-16 Published Online January 2016 in Hans. https://www.360docs.net/doc/611802080.html,/journal/nst https://www.360docs.net/doc/611802080.html,/10.12677/nst.2016.41002 Exploration and Analysis of the Cusp Magnetic Bottle —New Magnetic Confinement Device with Configurations as Magnetic Trap Shuqin Tian Qiandian Station of Shenyang Railway, Fushun Liaoning Received: Jan. 4th, 2016; accepted: Jan. 26th, 2016; published: Jan. 29th, 2016 Copyright ? 2016 by author and Hans Publishers Inc. This work is licensed under the Creative Commons Attribution International License (CC BY). https://www.360docs.net/doc/611802080.html,/licenses/by/4.0/ Abstract The cusp magnetic bottle is a magnetic confinement device constituted by magnets on each vertex of the regular polyhedron. The internal magnetic field configuration is an ideal magnetic trap with the bottom magnetic induction intensity of zero, which could reach up to the limit value defined by the trap depth. The changing curve of magnetic induction intensity has indicated that, the magnet-ic induction intensity difference for cusp magnetic bottle of regular dodecahedron is over 20 times greater than that for softball seal coil of same volume and that the cusp magnetic bottle has a larger space to expand. The constraint theory of plasma by the cusp magnetic bottle is to rely on the magnetic trap and magnetic confinement theory indicates that, only magnetic trap configura-tion can truly achieve the stable confinement of plasma. Tokamak or magnetic mirror is to rely on the adhesion of particles of electricity on magnetic line of force. However, it has all kinds of ma-croscopic and microcosmic instabilities from both theoretically and practically. These instabilities would no long exist in the cusp magnetic bottle. From the constitution of cusp magnetic bottle, the materials, operation, structure, flexibility, expansibility and other aspects all indicate that the cusp magnetic bottle is far superior to traditional magnetic confinement devices. Keywords Cusp Magnetic Bottle, Magnetic Trap, Cusp Field, Magnetic Confinement 会切磁瓶探析 —磁场位形为磁阱的新型磁约束装置
磁约束聚变现状研究汇总
1 前言 能源是社会发展的基础,化石燃料不仅储量有限,而且会造成严重的生态环境破坏和污染,预期200多年后,人类将面临严重的能源枯竭问题,因此,必须 尽快完成战略新能源的开发研究。在一系列的新能源中,核聚变能是最理想的清洁新能源。 核聚变反应包括氘氚反应、氘氦反应、氢硼反应等,其中氘氚反应在地球上最易实现,因其反应资源存在于海水中,一旦实现受控热核聚变,海水将成为人类取之不尽用之不竭的资源。这需要氘或氚,在一定条件下(如超高温和高压)让核外电子摆脱原子核的束缚,让两个原子核能够互相吸引而碰撞到一起,发生原子核互相聚合作用,生成新的质量更重的原子核(如氦),中子虽然质量比较大,但是由于中子不带电,因此也能够在这个碰撞过程中逃离原子核的束缚而释放出来,大量电子和中子的释放所表现出来的就是巨大的能量释放。 2 惯性约束聚变装置简介 现有的可控核聚变约束手段主要有两种,一种是惯性约束,一种是磁约束。 惯性约束是指利用粒子的惯性作用来约束粒子本身,从而实现核聚变反应的一种方法。其基本思想是:利用驱动器提供的能量使靶丸中的核聚变燃料(氘、氚)形成等离子体,在这些等离子体粒子由于自身惯性作用还来不及向四周飞散的极短 时间内,通过向心爆聚被压缩到高温、高密度状态,从而发生核聚变反应。该项 研究主要在美国的国家点火装置(NIF),中国的神光-Ⅲ主机装置,如图1所示。 (a)
(b) 图1 (a)国家点火装置 (b)神光-Ⅲ主机装置 美国的国家点火装置位于加利福尼亚州的利弗莫尔国家实验室,在过去的一段时间里,其工作人员一直致力于将192束激光集中于一个花生米大小的、装有氢粒子的目标上。当能量为500太瓦的激光撞击到装有氢粒子的目标上后,会产生X光粒子,使得重氢原子和超重氢原子产生聚变,这种聚变使得少量物质转变为巨大能量。但由于技术问题,该项目在2012年末将工作重点由聚变能研究领域重新转回到核武器试验上。 我国的“神光-Ⅲ主机装置”,已在2015年由中物院基本建成。作为亚洲最大,世界第二大激光装置,神光-Ⅲ主机装置共有48束激光,总输出能量为18万焦耳,峰值功率高达60万亿瓦。 3 磁约束聚变装置简介 磁约束聚变是指用特殊形态的磁场把氘、氚等轻原子核和自由电子组成的、 处于热核反应状态的超高温等离子体约束在有限的体积内,使它受控制地发生大量的原子核聚变反应,释放出能量。 自上个世纪60年代中期以来,各国科学家先后建成的磁约束装置包括托卡 马克、仿星器、反场箍缩、磁镜、多级场等。 3.1 托卡马克 托卡马克,是一种利用磁约束来实现受控核聚变的环性容器。它的名字Tokamak 来源于环形、真空室、磁、线圈,最初是由位于前苏联莫斯科的库尔
自动装置原理
发电机组投入系统运行之前,其电压与并列母线电压的状态量往往不等,需对待并发电机进 行适当调整,使之符合并列运行条件之后才允许断路器合闸作并网运行——这样的操作过程 称为 发电机的并列操作。 发电机并列操作应该遵循以下原则: 1. 并列瞬间,发电机的冲击电流应尽可能小,不应超过允许值(其瞬时最大值一般不超过1 -2倍的额定电流); 2. 并列后,发电机应能迅速进入同步运行,暂态过程要短 ,以减小对电力系统的扰动。 准同步并列的理想条件 幅值相等:UG=UX 频率相等:ωG=ωX (ω=2πf ) 相角相等:δe=0(δG=δX )(相角差为零) 冲击电流最大瞬时值限制在1-2倍额定电流一下为宜 为了保证机组安全运行,一般将有功冲击电流限制在较小数值。(0.5倍额定电流以下) 滑差角频率: 脉动周期: 准同期并列与自同期并列的区别 (1)准同期并列(准同步并列) 待并发电机在并列前已经励磁,当发电机的频率、电压相角、电压大小分别和并列点系统 侧 的频率、电压相角、电压大小接近相同时,将发电机断路器合闸,完成并列操作。 优点:冲击电流小,对系统影响不大。 缺点:同期时间长;手动误操作会引起非同期并列。 (2)自同期并列(自同步并列) 将一台未加励磁电流的发电机组升速到接近于额定转速的条件下,首先合上并列断路器QF , 接着立刻合上励磁开关SE ,给转子加上励磁电流,在发电机电动势逐渐增长的过程中,由 电力系统将并列的发电机组拉入同步运行。 (将未加励磁、接近同步转速的发电机投入系统,随后给发电机加上励磁,在原动机转矩、 同步力矩的作用下将发电机拉入同步,完成并列操作。) 自同步并列的优点 并列过程中不存在调整发电机电压、频率的问题,并列时间短且操作简单,在系统电压和频 率降低的情况下,仍有可能将发电机并入系统,容易实现自动化;不足是并列发电机未经励 磁,并列时会从系统中吸收无功而造成系统电压下降,同时产生很大的冲击电流。 P -f 控制器汽轮机蒸汽汽阀发电机执行机构Q -U 控制器△P △f △P c △f 频率检测到发电机母线测量 控制可控励磁电源励磁绕组
磁约束实验报告
南昌大学实验报告 磁约束核聚变装置控制虚拟仿真实验报告 一、实验目的 (1)理解磁约束核聚变的基本原理; (2)熟悉托克马克实验装置控制的一般操作流程; (3)了解托克马克实验装置的一般平衡磁场位型、等离子体密度分布和温度分布的特征图像; (4)了解托克马克实验装置L 、H 模式下等离子体的密度和温度分布区别。 二、实验仪器 磁约束核聚变装置控制虚拟仿真实验系统:主要包括NCST 装置(南昌大学球马克实验装置模型)、抽真空系统、中央控制系统、电源系统、加料系统、磁场电源控制器、等离子体加热系统、磁场诊断探针、激光汤姆逊散射诊断系统、诊断数据采集器、数据处理系统等软件操作模块。 三、实验原理 托卡马克是一环形装置。欧姆线圈的电流变化提供产生、建立和维持等离子体电流所需要的伏秒数;极向场线圈产生的极向磁场控制等离子体截面形状和位置平衡;环向场线圈产生的环向磁场保证等离子体的宏观整体稳定性;环向磁场与等离子体电流产生的极向磁场一起构成磁力线旋转变换的和磁面结构嵌套的磁场位形来约束等离子体。在托卡马克装置上,已可通过大功率中性束注入加热和各种微波加热使等离子体达到和超过氘一氚有效燃烧所需的温度(>10K)。研究表明加大装置尺寸,约束时间大致按尺寸的平方增大。此外,还可通过提高环向磁场、优化约束位形和运行模式来提高能量约束时间。 高温等离子体被约束在不与真空室壁相碰的位置上,在约束过程中存在大量不稳定性、热传导损失和辐射损失等,在约束控制过程中需要不断诊断等离子体参数,抑制各种导致等离子体破裂的不稳定性发展,同时通过各种辅助加热使反应堆的输入和输出整体功率平衡,满足等离子体的点火条件,即著名的劳森判据: 2032210/E E p n T sK m ττ=≥?, (1) 才能实现等离子体的自持燃烧,其中n 和T 分别为约束等离子体密度和温度,E τ为等离子体能量约束时间,即等离子体能量由于热传导下降到1 e -的弛豫时间。从点火条件可知,T 的最小值和相应的E p τ值为:
约束优化设计
第四章 约束优化设计 ● 概述 ● 约束坐标轮换法 ● 随机方向法 ● 罚函数法 概述 结构优化设计的问题,大多属于约束优化设计问题,其数学模型为: 根据求解方式的不同,可分为直接解法和间接解法两类。 直接解法是在仅满足不等式约束的可行设计区域内直接求出问题的约束最优解。属于这类方法的有:随机实验法、随机方向搜索法、复合形法、可行方向法等。其基本思路: 在由m 个不等式约束条件g u (x )≤0所确定的可行域φ内,选择一个初始点0 X 然后确定一个可行搜索方向S ,且以适当的步长沿S 方向进行搜索,取得一个目标函数有所改善的可行的新点1 X 即完成了一次迭代。以新点为起始点重复上述搜索过程,每次均按如下的基本迭代格式进行计算: k+1k k k =+S (k=0,1,2,..)X X α逐步趋向最优解, 直到满足终止准则才停止迭代。 直接解法的原理简单,方法实用,其特点是: 1) 由于整个过程在可行域内进行,因此,迭代计算不论何时终止,都可以获得比初始点好 的设计点。 2) 若目标函数为凸函数,可行域为凸集,则可获得全域最优解,否则,可能存在多个局部 最优解,当选择的初始点不同,而搜索到不同的局部最优解。 3) 要求可行域有界的非空集 1,2,...,1,2,...,u m v p n == 间接解法 间接解法是将约束优化问题转化为一系列无约束优化问题来解的一种方法。由于间接解法可以选用已研究比较成熟的无约束优化方法,并且容易处理同时具有不等式约束和等式约束的问题。因而在机械优化设计得到广泛的应用。 间接解法中具有代表性的是惩罚函数法。将约束函数进行特殊的加权处理后,和目标函数结合起来,构成一个新的目标函数,即将原约束优化问题转化为一个或一系列的无约束优化问题。 然后对新目标函数进行无约束极小化计算。 间接法是结构优化设计中广泛使用的有效方法,其特点: 1) 由于无约束优化方法的研究日趋成熟,为间接法提供可靠基础。这类算法的计算效率和 数值计算的稳定性大有提高; 2) 可以有效处理具有等式约束的约束优化问题; 3) 目前存在的主要问题,选取加权因子较为困难,选取不当,不仅影响收敛速度和计算精 度,甚至导致计算失败。 a) 可行域是凸集;b)可行域是非凸集 () ()()()121211 ,,m l j k j k X F X G g X H h X φμμμμ==??=++? ?????∑∑ 新目标函数 加权因子 五、托卡马克中的其他重要问题(磁约束、平衡、加热、 第一壁之外) 1.托卡马克物理发展的重要点 19世纪30年代英国的M.法拉第以及其后的J.J.汤姆孙、J.S.E.汤森德等人相继研究气体放电现象,这实际上是等离子体实验研究的起步时期。 1879年英国的W.克鲁克斯采用“物质第四态”这个名词来描述气体放电管中的电离气体。 美国的I.朗缪尔在1928年首先引入等离子体这个名词,等离子体物理学才正式问世。1929年美国的L.汤克斯和朗缪尔指出了等离子体中电子密度的疏密波(即朗缪尔波)。 对空间等离子体的探索,也在20世纪初开始。1902年英国的亥维赛(发现地球上电离离层的中层,E层,被称为亥维赛层)等为了解释无线电波可以远距离传播的现象,推测地球上空存在着能反射电磁波的电离层。这个假说为英国的E.V.阿普顿用实验证实。 英国的D.R.哈特里(1931)和阿普顿(1932)提出了电离层的折射率公式,并得到磁化等离子体的色散方程。 ――――以下与托卡马克密切相关(在高温等离子体书中有对应内容)―――― 从20世纪30年代起,磁流体力学等离子体的 速度分布函数服从福克-普朗克方程。1936年给出方程中 1938年苏联的A.A. 方程,即弃去碰撞项的无碰撞方程。朗道碰撞积分和符拉索夫方程的提出,标志着动力论的发端。 1942年瑞典的H.阿尔文指出,当理想导电流体处在磁场中,会产生沿磁力线传播的横波(即阿尔文波)。 印度的S.钱德拉塞卡在1942年提出用试探粒子模型来研究弛豫过程。 1946年朗道证明当朗缪尔波传播时,共振电子会吸收波的能量造成波衰减,这称为朗道阻尼。朗道的这个理论,开创了等离子体中波和粒子相互作用和微观不稳定性这些新的研究领域。 从1935年延续至1952年,苏联的H.H.博戈留博夫、英国的 刘维定理出发,得到了不封闭的方程组系列,名为BBGKY链 《最优化方法》复习题 第一章 引论 一、 判断与填空题 1 )].([arg )(arg m in m ax x f x f n n R x R x -=∈∈ √ 2 {}{}.:)(min :)(max n n R D x x f R D x x f ?∈-=?∈ ? 3 设.:R R D f n →? 若n R x ∈*,对于一切n R x ∈恒有)()(x f x f ≤*,则称*x 为最优化问题 )(min x f D x ∈的全局最优解. ? 4 设.:R R D f n →? 若D x ∈*,存在*x 的某邻域)(*x N ε,使得对一切)(*∈x N x ε恒有)()(x f x f <*,则称*x 为最优化问题)(min x f D x ∈的严格局部最 优解. ? 5 给定一个最优化问题,那么它的最优值是一个定值. √ 6 非空集合n R D ?为凸集当且仅当D 中任意两点连线段上任一点属于D . √ 7 非空集合n R D ?为凸集当且仅当D 中任意有限个点的凸组合仍属于D . √ 8 任意两个凸集的并集为凸集. ? 9 函数R R D f n →?:为凸集D 上的凸函数当且仅当f -为D 上的凹函数. √ 10 设R R D f n →?:为凸集D 上的可微凸函数,D x ∈*. 则对D x ∈?,有).()()()(***-?≤-x x x f x f x f T ? 11 若)(x c 是凹函数,则}0)( {≥∈=x c R x D n 是凸集。 √ 12 设{}k x 为由求解)(min x f D x ∈的算法A 产生的迭代序列,假设算法A 为单调下降算 法,则对{} ,2,1,0∈?k ,恒有 )()(1k k x f x f ≤+ . 班级02321101 学号1120110436 姓名张鹏杰 磁约束原理与运用 [摘要]众所周知,以一定速度进入均匀磁场中的带电粒子作螺旋线运动。进入非均匀磁场中的带电粒子的运动轨迹是一条会聚的螺旋线。运用这一原理可以将热核反应中的等离子体约束在实验装置内从而实现可控的核聚变,为寻找新能源开辟蹊径。 [关键词]磁约束,等离子体,受控核聚变,能源 一、磁约束原理 带电粒子在磁场中沿螺线运动,回旋半径R与磁感应强度B成反比。在很强的磁场中,每个带电粒子的活动便被束缚在一根磁感线附近的很小范围内,只能沿磁感线做种纵向运动。 在热核反应的高温下,物质处于等离子态,有带电粒子组成,而由于上述原因,强磁场可以使带电粒子的横向输运过程受限。 在纵向,同样可以利用磁约束对粒子的运动加以限制。带电粒子的圆周运动可被等效视作通电线圈。设带电粒子的带电量为q,回旋频率为υ,回旋半径为R,则等效线圈中的电流I=q υ,面积S=,磁矩M=IS=qυ2π。对于在磁场中的回旋运动,可知υ=,R=,于是有: M== 理论上可以证明,在梯度不是太大的非均匀磁场中,带电粒子的磁矩M是个不变量。亦即,当带电粒子由较弱的磁场区进入较强的磁场区时(B增加),它的横向动能要按比例增加。然而由于洛伦兹力是不做功的,带电粒子的总动能不变,则纵向动能即纵向速度就要减小,甚至为零。通常将这种由弱到强的磁场位形叫做磁镜。如右图,两个同向通电线圈产生中间弱两边强的磁场位形,带电粒子在横向受到磁场约束,在纵向则在两线圈中来回反射,从而达到约 束的目的。不过,一部分纵向动能较大的粒子仍然有可能从磁镜两端逃出。而采用右图所示的环形磁约束结构则可避免这种情况。这种结构也是下面将要提到的托卡马克装置的基本结构。 第11章作业 11-1在给定轮系主动轮的转向后,可用什么方法来确定定轴轮系从动轮的转向?周转轮系中主、从动件的转向关系又用什么方法来确定? 答:参考教材216~218页。 11-2如何划分一个复合轮系的定轴轮系部分和各基本周转轮系部分?在图示的轮系中,既然构件5作为行星架被划归在周转轮系部分中,在计算周转轮系部分的传动比时,是否应把齿 轮5的齿数,Z5计入? 答:划分一个复合轮系的定轴轮系部分和各基本周转轮系部分关键 是要把其中的周转轮系部分划出来,周转轮糸的特点是具有行星轮 和行星架,所以要先找到轮系中的行星轮,然后找出行星架。每一 行星架,连同行星架上的行星轮和与行星轮相啮合的太阳轮就组成 一个基本周转轮糸。在一个复合轮系中可能包括有几个基本周转轮 系(一般每一个行星架就对应一个基本周转轮系),当将这些周转轮一一找出之后.剩下的便是定轴轮糸部分了。 在图示的轮系中.虽然构件5作为行星架被划归在周转轮系部分中,但在计算周转轮系部分的传动比时.不应把齿轮5的齿数计入。 11-3在计算行星轮系的传动比时,式i mH=1-i H mn只有在什么情况下才是正确的? 答在行星轮系,设固定轮为n, 即ωn=0时, i mH=1-i H mn公式才是正确的。 11-4在计算周转轮系的传动比时,式i H mn=(n m-n H)/(n n-n H)中的i H mn是什么传动比,如何确定其大小和“±”号? 答: i H mn是在根据相对运动原理,设给原周转轮系加上一个公共角速度“-ωH”。使之绕行星架的固定轴线回转,这时各构件之间的相对运动仍将保持不变,而行星架的角速度为0,即行星架“静止不动”了.于是周转轮系转化成了定轴轮系,这个转化轮系的传动比,其大小可以用i H mn=(n m-n H)/(n n-n H)中的i H mn公式计算;方向由“±”号确定,但注意,它由在转化轮系中m. n两轮的转向关系来确定。 11-5用转化轮系法计算行星轮系效率的理论基础是什么?为什么说当行星轮系为高速时,用它来计算行星轮系的效率会带来较大的误差? 答: 用转化轮系法计算行星轮系效率的理论基础是行星轮系的转化轮系和原行星轮系的差别,仅在于给整个行星轮系附加了一个公共角速度“-ωH”。经过这样的转化之后,各构件之间的相对运动没有改变,而轮系各运动副中的作用力(当不考虑构件回转的离心惯性力时)以及摩擦因数也不会改变。因而行星轮系与其转化轮系中的摩擦损失功率P H f应相等。 用转化轮系法计算行星轮系效率没有考虑由于加工、安装和使用情况等的不同,以及还有一些影响因素如搅油损失、行星轮在公转中的离心惯性力等,因此理论计算的结果并不能完全正确地反映传动装置的实际效率。 带点粒子在磁场和复合场中的运动专题 一、复合场中有约束的直线运动 1、如图所示,一个带负电的滑环套在水平且足够长的粗糙绝缘杆上,整个装置处于方向如图所示的匀强磁场B 中.现给滑环一个水平向右的瞬时速度,则滑环在杆上的运动情况可能是( ) A .始终做匀速运动 B .先做减速运动,最后静止在杆上 C .先做加速运动,最后做匀速运动 D .先做减速运动,最后做匀速运动 2、如图所示为一个质量为m 、带电量为+q 的圆环,可在水平放置的粗糙细杆上自由滑动,细杆处于磁感应强度为B 的匀强磁场中,圆环以初速度v 0向右运动直至处于平衡状态,则圆环克服摩擦力做的功可能为 ( ) A .0 B . C . D . 3、如图所示,一个带负电的滑环套在倾斜且足够长的粗糙绝缘杆上,u 13SP02340600 《核工程概论及实践》 课程设计 核聚变装置原理及结构梳理 学号 姓名 院系 专业 完成日期 设计类型 得分 摘要 核聚变作为正在研究中的新能源,除了托卡马克装置以外还有包括仿星器、磁镜、反向箍缩和球马克在内的其它磁性约束装置;此外还有激光点火的惯性约束方案。本文主要介绍以上方案的原理和装置结构,由于接触时间有限,不对相关技术进行评价。 关键词:核聚变;托卡马克;仿星器;磁镜;反向箍缩;惯性约束 目录 摘要 ................................................................................................................................................... I 第一章托卡马克装置结构及原理. (1) 1.1约束的含义 (1) 1.2 托卡马克中磁约束的基本原理 (1) 1.3托卡马克系统的结构 (2) 1.4 本章小结 (4) 第二章其他磁性约束方式 (5) 2.1 仿星器 (5) 2.2 磁镜 (5) 2.3 反向箍缩 (6) 2.4 本章小结 (6) 第三章惯性约束方式原理 (7) 3.1 惯性约束的原理和实现 (7) 3.1.1 惯性约束的原理 (7) 3.1.2 实现手段 (7) 3.2 惯性约束聚变堆方案 (8) 3.3 本章小结 (8) 参考文献 (9) 第一章托卡马克装置结构及原理 托卡马克装置作为上世纪六、七十年代以来一直占据核聚变研究中心的聚变装置,目前在所有方案中取得的成果最为突出,如等离子体温度最高,(脉冲)功率最大,最先实现全超导等等,当然这得益于许多科学家的奉献和更多资金的投入。总的来说,尽管所有方案离商用发电都很遥远,但托卡马克是目前来看最有前途的聚变装置。 1.1约束的含义 核聚变必须使聚变材料的温度、密度和这种高温高压状态维持的时间(约束时间)的乘积满足劳森判据才能实现。 由于核聚变反应温度超高,即使最容易的氚-氘反应也要求反应温度大于5000万度才能大量进行;此时的核材料呈现为物质第四态——等离子态。 图1-1 日冕中的等离子体 等离子体是宇宙中很常见的物质形态,如太阳就是有等离子态的物质组成的,只不过如图1-1中日冕中等离子体温度为几千度,而聚变堆中由于体积限制,要求温度达到上亿度。 为了维持这类极高温的等离子体不消散掉,就需要各种各样非接触式的方法。首先想到的方法就是利用电磁场来约束带电的等离子体,而第二种方法则利用激光推动核材料聚集。 1.2 托卡马克中磁约束的基本原理 图1-2是ITER项目公布的托卡马克设计图,可以看到反应腔内等离子体截五、托卡马克中的重要问题(磁约束、平衡、加热、第一壁之外)
修订过的最优化方法复习题
磁约束原理与运用.
机械原理课后案第11章
磁场专题(磁约束,旋转圆)
核聚变方式及装置、原理介绍