【CN110046833A】一种交通拥堵辅助系统虚拟测试系统【专利】
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910392402.3
(22)申请日 2019.05.13
(71)申请人 吉林大学
地址 130012 吉林省长春市前进大街2699
号
(72)发明人 詹军 刘荣 王战古 杨凯
董学才 祝怀男
(74)专利代理机构 长春吉大专利代理有限责任
公司 22201
代理人 杜森垚
(51)Int.Cl.
G06Q 10/06(2012.01)
G06F 11/36(2006.01)
(54)发明名称
一种交通拥堵辅助系统虚拟测试系统
(57)摘要
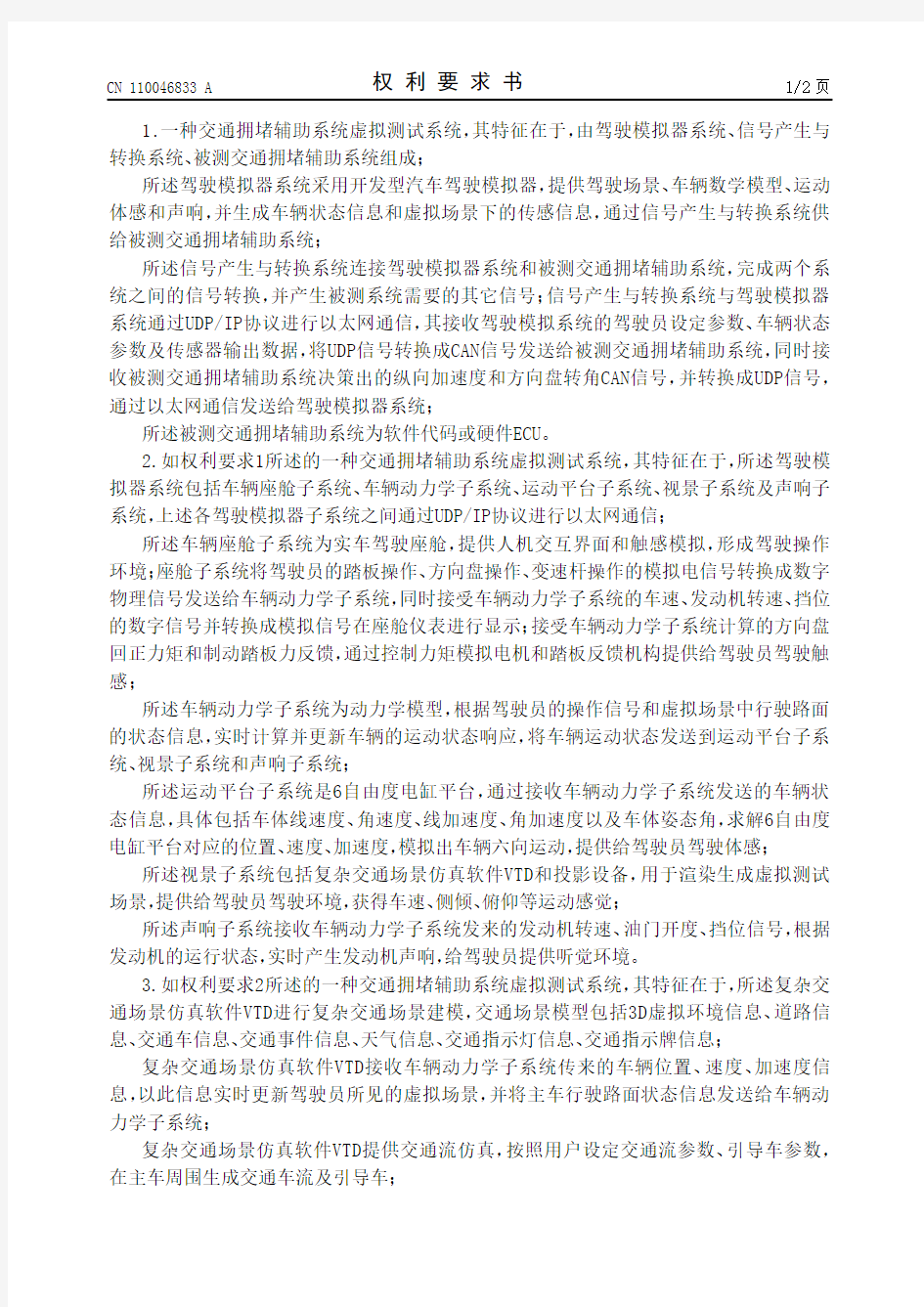
本发明公开了一种交通拥堵辅助系统虚拟
测试系统,由驾驶模拟器系统、信号产生与转换
系统、被测交通拥堵辅助系统组成;驾驶模拟器
系统采用开发型汽车驾驶模拟器,提供驾驶场
景、车辆数学模型、运动体感和声响,并生成车辆
状态信息和虚拟场景下的传感信息;信号产生与
转换系统连接驾驶模拟器系统和被测交通拥堵
辅助系统,完成两个系统之间的信号转换,并产
生被测系统需要的其它信号;被测交通拥堵辅助
系统为软件代码或硬件ECU。本发明利用驾驶模
拟器可充分模拟车辆的驾乘运动体感、操作触
感、声响听觉等优势进行虚拟验证,该虚拟测试
系统能够对交通拥堵辅助系统进行SIL、HIL、DIL
各阶段的测试验证,并进行客观和主观的全面评
价。权利要求书2页 说明书6页 附图3页CN 110046833 A 2019.07.23
C N 110046833
A
权 利 要 求 书1/2页CN 110046833 A
1.一种交通拥堵辅助系统虚拟测试系统,其特征在于,由驾驶模拟器系统、信号产生与转换系统、被测交通拥堵辅助系统组成;
所述驾驶模拟器系统采用开发型汽车驾驶模拟器,提供驾驶场景、车辆数学模型、运动体感和声响,并生成车辆状态信息和虚拟场景下的传感信息,通过信号产生与转换系统供给被测交通拥堵辅助系统;
所述信号产生与转换系统连接驾驶模拟器系统和被测交通拥堵辅助系统,完成两个系统之间的信号转换,并产生被测系统需要的其它信号;信号产生与转换系统与驾驶模拟器系统通过UDP/IP协议进行以太网通信,其接收驾驶模拟系统的驾驶员设定参数、车辆状态参数及传感器输出数据,将UDP信号转换成CAN信号发送给被测交通拥堵辅助系统,同时接收被测交通拥堵辅助系统决策出的纵向加速度和方向盘转角CAN信号,并转换成UDP信号,通过以太网通信发送给驾驶模拟器系统;
所述被测交通拥堵辅助系统为软件代码或硬件ECU。
2.如权利要求1所述的一种交通拥堵辅助系统虚拟测试系统,其特征在于,所述驾驶模拟器系统包括车辆座舱子系统、车辆动力学子系统、运动平台子系统、视景子系统及声响子系统,上述各驾驶模拟器子系统之间通过UDP/IP协议进行以太网通信;
所述车辆座舱子系统为实车驾驶座舱,提供人机交互界面和触感模拟,形成驾驶操作环境;座舱子系统将驾驶员的踏板操作、方向盘操作、变速杆操作的模拟电信号转换成数字物理信号发送给车辆动力学子系统,同时接受车辆动力学子系统的车速、发动机转速、挡位的数字信号并转换成模拟信号在座舱仪表进行显示;接受车辆动力学子系统计算的方向盘回正力矩和制动踏板力反馈,通过控制力矩模拟电机和踏板反馈机构提供给驾驶员驾驶触感;
所述车辆动力学子系统为动力学模型,根据驾驶员的操作信号和虚拟场景中行驶路面的状态信息,实时计算并更新车辆的运动状态响应,将车辆运动状态发送到运动平台子系统、视景子系统和声响子系统;
所述运动平台子系统是6自由度电缸平台,通过接收车辆动力学子系统发送的车辆状态信息,具体包括车体线速度、角速度、线加速度、角加速度以及车体姿态角,求解6自由度电缸平台对应的位置、速度、加速度,模拟出车辆六向运动,提供给驾驶员驾驶体感;
所述视景子系统包括复杂交通场景仿真软件VTD和投影设备,用于渲染生成虚拟测试场景,提供给驾驶员驾驶环境,获得车速、侧倾、俯仰等运动感觉;
所述声响子系统接收车辆动力学子系统发来的发动机转速、油门开度、挡位信号,根据发动机的运行状态,实时产生发动机声响,给驾驶员提供听觉环境。
3.如权利要求2所述的一种交通拥堵辅助系统虚拟测试系统,其特征在于,所述复杂交通场景仿真软件VTD进行复杂交通场景建模,交通场景模型包括3D虚拟环境信息、道路信息、交通车信息、交通事件信息、天气信息、交通指示灯信息、交通指示牌信息;
复杂交通场景仿真软件VTD接收车辆动力学子系统传来的车辆位置、速度、加速度信息,以此信息实时更新驾驶员所见的虚拟场景,并将主车行驶路面状态信息发送给车辆动力学子系统;
复杂交通场景仿真软件VTD提供交通流仿真,按照用户设定交通流参数、引导车参数,在主车周围生成交通车流及引导车;
2
虚拟仿真(虚拟现实)实验室解决方案设计
数虎图像提供虚拟仿真实验室硬件设备搭建和内容制作整体解决 方案 虚拟现实实验室是虚拟现实技术应用研究就的重要载体。 随着虚拟实验技术的成熟,人们开始认识到虚拟实验室在教育领域的应用价值,它除了可以辅助高校的科研工作,在实验教学方面也具有如利用率高,易维护等诸多优点.近年来,国内的许多高校都根据自身科研和教学的需求建立了一些虚拟实验室。数虎图像拥有多名虚拟现实软硬件工程师,在虚拟现实实验室建设方面有着无与伦比的优越性! 下面请跟随数虎图像一起,让我们从头开始认识虚拟现实实验室。【虚拟现实实验室系统组成】: 建立一个完整的虚拟现实系统是成功进行虚拟现实应用的关键,而要建立一个完整的虚拟现实系统,首先要做的工作是选择确实可行的虚拟现实系统解决方案。 数虎图像根据虚拟现实技术的内在含义和技术特征,并结合多年的虚拟现实实验室建设经验,最新推出的虚拟现实实验室系统提供以下组成:
虚拟现实开发平台: 一个完整的虚拟现实系统都需要有一套功能完备的虚拟现实应用开发平台,一般包括两个部分,一是硬件开发平台,即高性能图像生成及处理系统,通常为高性能的图形计算机或虚拟现实工作站;另一部分为软件开发平台,即面向应用对象的虚拟现实应用软件开发平台。开发平台部分是整个虚拟现实系统的核心部分,负责整个VR场景的开发、运算、生成,是整个虚拟现实系统最基本的物理平台,同时连接和协调整个系统的其它各个子系统的工作和运转,与他们共同组成一个完整的虚拟现实系统。因此,虚拟现实系统开发平台部分在任何一个虚拟现实系统中都不可缺少,而且至关重要。 虚拟现实显示系统: ·高性能图像生成及处理系统 ·具有沉浸感的虚拟三维显示系统 在虚拟现实应用系统中,通常有多种显示系统或设备,比如:大屏幕监视器、头盔显示器、立体显示器和虚拟三维投影显示系统,
先进驾驶辅助系统(ADAS)测试技术
先进驾驶辅助系统(ADAS)测试技术 一、中国汽车行业车辆主动安全的发展现状 汽车进入中国市场的短短20年间,已然使我国成为全球最大的汽车生产及销售国。2014年的产销分别完成2143.05万辆和2107.91万辆,比上年同期分别增长7.2%和6.1%。中国汽车市场的高速疾行,无论是消费者还是汽车制造企业,在这个过程中都受益匪浅。然而婉转优美的旋律背后,掩盖的却是整个社会浮躁与取巧的心态。自由奔放增长的同时伴随着一个让人焦虑的数字,仅2013年,我国交通事故死亡人数就达到60000人,这个数字背后隐藏的事实是对安全意识和辅助措施的缺乏。 今年年初奥迪在拉斯维加斯举行的CES(消费电子展)期间,向外界展示了集合汽车安全、传感器通信之大成的自动驾驶技术,前不久丰田汽车也在东京举行“全球安全技术交流会”,而中国的汽车企业近年来也不约而同的将研发重点放在了汽车安全技术的研发当中。无论是主动安全还是被动安全,安全产品的开发应用正在如火如荼的进行。改善汽车安全,尤其是主动安全技术(ADAS)地位正在凸显,主动安全技术(ADAS)正在成为汽车电子领域的新宠儿。 先进驾驶辅助技术(即ADAS)即主动安全技术的诠释,它是一种高级驾驶员辅助系统,在车辆行驶过程中全程帮助驾驶员的主动安全辅助系统。现阶段ADAS 系统应用最广的三大技术是自适应巡航控制系统(ACC)、车道偏离预警系统(LDW)以及自动紧急刹车系统(AEB),预计2015年这3中技术组成的ADAS市场价值将急速增加。除此之外,ADAS系统还包括夜视系统(NV)、驾驶员困倦报警系统、自适应灯光控制系统、以及限速交通标志提醒等系统。 二、ADAS技术应用的现实及普世意义 随着消费者对车辆安全的理解和需求不断提升,ADAS技术的开发与应用也就成为了汽车企业市场竞争力的重要筹码,能够让更多汽车搭载更加有效减少伤亡的安全系统,也更具有现实和普世意义。此时,除了研究ADAS的新功能和算法,保证ADAS功能在整车环境的可靠与稳定已成为了其开发最大的难点。只有通过完善的ADAS测试技术才能够尽早在研发阶段发现问题,挖掘ADAS隐藏的功能缺陷及不合理之处,才能够保证ADAS技术应用的功能完整性及有效性,从而确保产品在炙手可热的市场中的核心竞争力。 目前国际化标准组织以及Euro NCAP(汽车界最权威的安全认证机构)均对ACC、LDW系统指定了实车测试的典型工况及要求,并且Euro NCAP对此有详细的评估准则与星级评分。此外2014年Euro NCAP将AEB(自动紧急刹车系统)正式纳入评估体系,并且制订了实车测试的典型工况与评价标准。因此,ADAS 系统应用的重要性与必要性显而易见。 三、ADAS系统自身特色及测试重点 ADAS系统的功能与应用特性不同于常规汽车电子控制系统,ADAS具有自身的特点: 1)ADAS的应用场景一般为人、车、路构成的闭环系统,三者缺一不可 2)ADAS与自身车辆性能以及道路的特性、驾驶员的安全行为直接相关 3)ADAS系统通常需与多个车载控制系统协作,是一种分布式控制系统
综合数据采集系统测试分析
综合数据采集系统测试分析 【摘要】本文阐述了综合数据采集系统测试的重要性,归纳了测试依据与标准,并对典型故障进行分析和总结。 【关键词】综合数据采集系统;参数测试;总线 1、引言 随着直升机不断向高度综合化、智能化和通用化方向发展,用于记录飞机姿态信息和各种重要飞行信息的飞行参数记录系统[1]逐渐被综合数据采集系统取代,其功能也得到了进一步扩展。综合数据采集系统应用AFDX、1553B等数字总线技术实现对直升机维护数据、状态数据和飞行数据的采集。本文阐述了综合数据采集系统试验测试依据与标准,对试验测试的典型故障进行分析和总结。 2、测试的意义及必要性 综合数据采集系统是直升机重要机载系统之一。所记录的数据经地面数据处理站分析处理后,可用于直升机维护、训练评估和事故分析[2]。由于部件集成度高,与机载设备交联复杂,采集信号多样化,因此为了保障系统工作的可靠性,需要对其性能进行检测。 建立综合数据采集系统的试验能力,其意义和必要性主要体现在以下几点:(1)在科研、生产过程中,如果将系统部品直接装机,一旦出现故障无法定位,还会给其它交联的机载设备带来安全隐患,因此需要对其进行装机前校验。 (2)由于综合数据采集系统主要应用于直升机飞行事故评估,其记录数据的可靠性将直接影响判定结论,因此必须建立系统试验能力,实现对系统记录数据可靠性检测。 (3)对综合数据采集系统试验能力的建设,利于对其它机载系统故障的判读与解析,极大地提高了解决总装通电和试飞时故障问题的能力。 (4)可建立对单机试验测试数据的管理,形成测试档案提供给用户,为直升机今后的故障预测与系统维护提供科学依据。 3、测试依据与标准 按照GJB6346-2008《军用直升机飞行参数采集要求》的规定,采集信号的类型分为模拟量、数字量、开关量和频率量信号,标准中对各类参数的采集精度、采样间隔、信号源和采集范围都进行了明确规定。在对综合数据采集系统记录参数进行测试时,结合此标准,针对不同机型用户的要求,来制定相应的系统参数采集标准。 试验测试时对对参数的采集应遵循以下原则: (1)参数的模拟范围应全面、准确。既能够反映整机工作状态,又能够准确反映飞机状态急剧变化及飞机系统工作瞬间异常变化的情况。 (2)对每个参数的采集点设计,应从机载信号源头进行引接,确保真实、准确的反映机载设备的工作状态,中间未经转接与数据处理。 (3)与机载其它系统交联进行参数采集测试时,不能影响其它系统的正常工作。 4、典型故障分析 4.1采集点选择错误 对发动机系统的“发动机停车”参数进行测试时,发现不管如何模拟信号状态变化,测试结果均显示“停车”状态。
远程虚拟仿真实验室教学系统
电力电子虚拟仿真教学实验平台 实验室建设背景 目前的高等教育中,越来越强调对学生实践能力的培养,实验教育成为理工科教育的一个至关重要的环节。然而,随着各学科实验项目和学生人数的增多,传统的电气实验室和实验仪器数量很难满足学生的需求,在教学和学生使用上的不便之处也慢慢凸现出来。如何解决传统实验教学资源分配不足、实验方式过于刻板、实验器材维护费时费力、实验内容固定难以拓展等问题,是目前新工科建设、课程改革内容中一个讨论的热点。 在对创新型实验建设的需求日益明确之际,仿真实验教学的概念开始成为学校关注的重点。仿真教学实验是一种基于软件技术构建的虚拟实验教学系统,是现有各种教学实验室的数字化和虚拟化,为开设各种专业实验课程提供了全新的教学与科研环境。因此建设仿真实验室可以与实物实验室互补,它除了可以辅助高校的科研工作,在实验教学方面也具有如利用率高,易维护等诸多优点。近年来,国内的许多高校都根据自身科研和教学的需求建立了一些高科技的仿真实验室。 远宽解决方案 远宽能源除了将仿真技术应用于科研与工业测试,也率先将该技术引入到了教学实验室建设中。对于不同的实验内容与实验类型,远宽能源提出了如下的仿真实验建设的解决方案:实时仿真实验和远程虚拟仿真实验。
1. 实时仿真实验 远宽能源将先进的FPGA小步长实时仿真技术应用到教学实验室建设中,小步长实时仿真技术使它能够覆盖电力电子、电机驱动、新能源等多个电力电子相关应用的创新教学实验以及研究的需求。基于图形化系统建模,模型一键下载,无需FPGA编程编译,大大增强了产品的易用性;同时实验平台还配置了硬件控制器(TI的DSP或者NI的GPIC),和仿真器构成完整的闭环系统。实时仿真实验系统如下图所示:
具有辅助判断功能的产品测试系统及产品测试辅助方法与相关技术
本技术为一种具有辅助判断功能的产品测试系统及应用于其上的产品测试辅助方法。该系统包含有一电脑装置与一测试治具,该电脑装置载有一机器学习模式。该方法包含下列步骤:测试治具按序测试多个待测试产品,并分别产生一测试数据而传送至电脑装置,进而由电脑装置分别产生一趋势线形图;作业员根据各趋势线形图进行判断而分别产生一人为判断结果;将各测试数据、趋势线形图与人为判断结果输入至机器学习模式进行一学习程序;以及当学习程序的样本数达一预设门限值时,使机器学习模式针对相应的测试数据与趋势线形图产生相应的一辅助判断结果。 权利要求书
1.一种产品测试辅助方法,应用于一产品测试系统与多个待测试产品上,该系统包含有一电脑装置与一测试治具,该电脑装置信号连接于该测试治具,该电脑装置载有一机器学习模式,而该方法包含下列步骤: 该测试治具按序测试所述待测试产品,并分别产生一测试数据而传送至该电脑装置; 该电脑装置将各测试数据分别产生一趋势线形图; 作业员根据各趋势线形图的显示内容进行判断而分别产生一人为判断结果; 将各测试数据、各趋势线形图与各人为判断结果输入至该机器学习模式中以进行一学习程序;以及 当该学习程序所具有的样本数达一预设门限值时,使该机器学习模式针对相应的该测试数据与该趋势线形图产生相应的一辅助判断结果。 2.如权利要求1所述的产品测试辅助方法,其中该方法为于该电脑装置中存储成一测试应用程序以提供执行,而该方法包含下列步骤: 执行该测试应用程序以控制该机器学习模式。 3.如权利要求1所述的产品测试辅助方法,其中各人为判断结果或各辅助判断结果为一第一品质类别或一第二品质类别,而该第一品质类别或该第二品质类别包含有至少一种等级的子项目。 4.如权利要求3所述的产品测试辅助方法,其中该方法还包含下列步骤: 该机器学习模式判断相应的该测试数据与该趋势线形图于该第一品质类别与该第二品质类别上所占的权重,而产生相应的该辅助判断结果。 5.如权利要求3所述的产品测试辅助方法,其中该方法还包含下列步骤:
高压脉冲采集测试系统
基于PCI Express的高速采集测试系统 采集系统规格: 系统基于PCI Express总线结构,包括如下几个部分: 1.4通道8bit500Msps同步采集,标准PCIe全长卡尺寸; 2.4个高速IO,产生激励脉冲输出。 3.外置脉冲放大器,输出100Vpp的激励短脉冲。 4.基于PCI Express x8总线的工控机。 系统实现框图如下: 采集系统如下所示:
采集卡包括如下特性: 1.4通道8bit500MSPS同步采集。 2.4通道程控增益放大器,增益倍数0-100倍调整,满幅度输出1Vpp。 3.输入通道DC耦合,50欧姆输入阻抗。 4.模拟输入带宽DC-120MHz/-3dB。 5.输入端口过压保护,允许200W/20us浪涌功率输入。 6.2GB本地缓存,保证每次触发,每通道有0.5S的采集时间。 7.支持PCIEx8接口,连续数据传输率1000MB/s。 8.低抖动、低相噪时钟发生器。 9.可以多块卡组成多通道同步工做模式。 系统工作模式如下: 1.触发设置:可以根据输入脉冲的幅度和宽度设置触发判决条件。 2.输入放大倍数可以通过软件设置。 3.输出脉冲相对于触发事件时间可以设置,最小单位为2ns。 4.出脉冲和触发事件条件随机延迟不超过4个采样点,及8ns。 5.触发后,采集长度可以设置,最大每通道可以采集500M个点。 6.可以回传长度为500M个点的原始波形供计算机软件分析。 系统配套软件: 系统软件包括应用软件,二次开发API函数,以及FPGA开发环境三部分。 1.应用软件,具有虚拟示波器功能,方便设置硬件,读取/保存数据以及波形显示/频谱分析功能。
永磁材料测试系统
永磁材料测试系统 1. 产品概述 TD8320是一套专用于测量永磁材料磁性能的智能化系统,由双极性直流磁化电源、磁测量装置、电磁铁、计算机及测量软件等组成非常适用于测量各类型永磁材料的磁性能,并绘制相关磁特性曲线。该系统具有操作便捷、测量快速、重复性/可靠性好的特点,可广泛应用于各级计量部门建立磁测量标准,满足区域内相关企业的送检需求;也可用于永磁材料生产商对产品进行全面质检,促进产品品质及生产效率的提高,提升企业核心竞争力;同样也适用于材料应用单位进行来料检测,对其进一步的产品设计和创新具有良好的指导意义。 2. 执行标准 2.1 GB/T 3217-2013《永磁(硬磁)材料磁性试验方法》 2.2 IEC60404-5《磁性材料第5部分:永磁(硬磁)材料磁性能测量方法》 3. 主要功能 3.1 被测永磁种类:永磁铁氧体、铝镍钴、钕铁硼、钐钴。
3.2 被测样品形状:圆环、圆柱、圆饼、方块、瓦形(需配夹具)。 3.3 测量磁性参数:剩磁Br、矫顽力Hcb、内禀矫顽力Hcj、最大磁能积(BH)max。 3.4 绘制磁性曲线:磁化曲线、退磁曲线、B-H磁滞回线、J-H磁滞回线。 4. 产品特点 4.1严格的溯源与量传技术:系统内置专用的校准程序和校准接线端钮,可通过高等级的电流表、磁通校准仪、标准特斯拉计对系统进行校准,所有磁参量直接溯源至电学基本量以保证测量数据的重复性、一致性、可比性和准确度。标准样品仅用于测量数据比对,不得用于对本仪器进行校准。 4.2 系统配置双极性磁化电源,方便样品的磁化与退磁;0~±80 A电流可程控输出,,以确保电磁铁的磁化场连续可调,且具有高准确度和稳定性。 4.3 电磁铁的极头由电工纯铁制成,极面高度平行,磁场线性度好;输入功率/磁场比小,采用自然冷却,低碳环保;线包带有过温保护,可靠性高。 4.4 电磁铁有二种类型可选,均可配不同规格的收缩极头,具体参见“8.电磁铁”。 4.5 磁通密度B测量:采用B线圈+磁通计,积分器零漂小。 4.6 磁极化强度J测量:采用J线圈+磁通计,并可对残匝面积进行补偿。 4.7磁场强度H测量:通过霍尔磁强计+霍尔探头的方式,探头非线性误差小;或采用H线圈+磁通计的方式。 4.8磁化电源和磁测量装置集成于一台主机内,并采用模块化设计,方便升级与维修。 4.9 系统配备专用的软件,除设置参数和摆放样品外,磁化、退磁、测量等过程由程序控制一次性完成,测量时间短;测量数据自动保存,报告包含完整的曲线图、测试结果、测试条件和样品参数,方便用户查看。
【CN110046833A】一种交通拥堵辅助系统虚拟测试系统【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910392402.3 (22)申请日 2019.05.13 (71)申请人 吉林大学 地址 130012 吉林省长春市前进大街2699 号 (72)发明人 詹军 刘荣 王战古 杨凯 董学才 祝怀男 (74)专利代理机构 长春吉大专利代理有限责任 公司 22201 代理人 杜森垚 (51)Int.Cl. G06Q 10/06(2012.01) G06F 11/36(2006.01) (54)发明名称 一种交通拥堵辅助系统虚拟测试系统 (57)摘要 本发明公开了一种交通拥堵辅助系统虚拟 测试系统,由驾驶模拟器系统、信号产生与转换 系统、被测交通拥堵辅助系统组成;驾驶模拟器 系统采用开发型汽车驾驶模拟器,提供驾驶场 景、车辆数学模型、运动体感和声响,并生成车辆 状态信息和虚拟场景下的传感信息;信号产生与 转换系统连接驾驶模拟器系统和被测交通拥堵 辅助系统,完成两个系统之间的信号转换,并产 生被测系统需要的其它信号;被测交通拥堵辅助 系统为软件代码或硬件ECU。本发明利用驾驶模 拟器可充分模拟车辆的驾乘运动体感、操作触 感、声响听觉等优势进行虚拟验证,该虚拟测试 系统能够对交通拥堵辅助系统进行SIL、HIL、DIL 各阶段的测试验证,并进行客观和主观的全面评 价。权利要求书2页 说明书6页 附图3页CN 110046833 A 2019.07.23 C N 110046833 A
权 利 要 求 书1/2页CN 110046833 A 1.一种交通拥堵辅助系统虚拟测试系统,其特征在于,由驾驶模拟器系统、信号产生与转换系统、被测交通拥堵辅助系统组成; 所述驾驶模拟器系统采用开发型汽车驾驶模拟器,提供驾驶场景、车辆数学模型、运动体感和声响,并生成车辆状态信息和虚拟场景下的传感信息,通过信号产生与转换系统供给被测交通拥堵辅助系统; 所述信号产生与转换系统连接驾驶模拟器系统和被测交通拥堵辅助系统,完成两个系统之间的信号转换,并产生被测系统需要的其它信号;信号产生与转换系统与驾驶模拟器系统通过UDP/IP协议进行以太网通信,其接收驾驶模拟系统的驾驶员设定参数、车辆状态参数及传感器输出数据,将UDP信号转换成CAN信号发送给被测交通拥堵辅助系统,同时接收被测交通拥堵辅助系统决策出的纵向加速度和方向盘转角CAN信号,并转换成UDP信号,通过以太网通信发送给驾驶模拟器系统; 所述被测交通拥堵辅助系统为软件代码或硬件ECU。 2.如权利要求1所述的一种交通拥堵辅助系统虚拟测试系统,其特征在于,所述驾驶模拟器系统包括车辆座舱子系统、车辆动力学子系统、运动平台子系统、视景子系统及声响子系统,上述各驾驶模拟器子系统之间通过UDP/IP协议进行以太网通信; 所述车辆座舱子系统为实车驾驶座舱,提供人机交互界面和触感模拟,形成驾驶操作环境;座舱子系统将驾驶员的踏板操作、方向盘操作、变速杆操作的模拟电信号转换成数字物理信号发送给车辆动力学子系统,同时接受车辆动力学子系统的车速、发动机转速、挡位的数字信号并转换成模拟信号在座舱仪表进行显示;接受车辆动力学子系统计算的方向盘回正力矩和制动踏板力反馈,通过控制力矩模拟电机和踏板反馈机构提供给驾驶员驾驶触感; 所述车辆动力学子系统为动力学模型,根据驾驶员的操作信号和虚拟场景中行驶路面的状态信息,实时计算并更新车辆的运动状态响应,将车辆运动状态发送到运动平台子系统、视景子系统和声响子系统; 所述运动平台子系统是6自由度电缸平台,通过接收车辆动力学子系统发送的车辆状态信息,具体包括车体线速度、角速度、线加速度、角加速度以及车体姿态角,求解6自由度电缸平台对应的位置、速度、加速度,模拟出车辆六向运动,提供给驾驶员驾驶体感; 所述视景子系统包括复杂交通场景仿真软件VTD和投影设备,用于渲染生成虚拟测试场景,提供给驾驶员驾驶环境,获得车速、侧倾、俯仰等运动感觉; 所述声响子系统接收车辆动力学子系统发来的发动机转速、油门开度、挡位信号,根据发动机的运行状态,实时产生发动机声响,给驾驶员提供听觉环境。 3.如权利要求2所述的一种交通拥堵辅助系统虚拟测试系统,其特征在于,所述复杂交通场景仿真软件VTD进行复杂交通场景建模,交通场景模型包括3D虚拟环境信息、道路信息、交通车信息、交通事件信息、天气信息、交通指示灯信息、交通指示牌信息; 复杂交通场景仿真软件VTD接收车辆动力学子系统传来的车辆位置、速度、加速度信息,以此信息实时更新驾驶员所见的虚拟场景,并将主车行驶路面状态信息发送给车辆动力学子系统; 复杂交通场景仿真软件VTD提供交通流仿真,按照用户设定交通流参数、引导车参数,在主车周围生成交通车流及引导车; 2
基于NIPXI_6624的多通道高频率信号采集测试系统设计_黄丽敏
科技信息 在实验过程中,经常要对一个或多个连续的脉冲波频率进行测量。在实际应用中,对于转速,位移、速度、流量等物理量的测量,一般也是由传感器转换成脉冲电信号,采用测量频率的手段实现。使用数据采集卡测量频率或周期,通常是利用采集卡的定时计数器来完成,测量的基本方法和原理主要有两种:测频法和测周法。测频法在限定的时间内检测脉冲的个数。测周法测试限定的脉冲个数之间的时间。这两种方法尽管原理是相同的,但在实际使用时,需要根据待测频率的范围、系统的时钟周期、计数器的长度以及所要求的测量精度等因素进行全面和具体的考虑,寻找和设计出适合具体要求的测量方法。本文利用NI PXI-6624进行多通道高频率信号的采集。 1.多通道频率采集硬件系统 为了实现对多路频率信号的准确采集和传送,利用NI 公司的硬件设备和LabVIEW 虚拟仪器开发平台构建了基于PXI-6624的多通道频率信号采集测试系统,其基本结构如图1所示。多通道频率采集测试系统主要由NI PXI-1042Q 机箱、NI PXI-6624采集卡、SH100-100-F Cable 屏蔽线缆及SCB-100接线盒4部分组成。 图1基于PXI6624频率信号采集系统的基本构成 PXI 机箱及控制器采用NI PXI-1042Q 。NI PXI-1042系列机箱可满足各种测试和测量应用的需求,具有最新PXI 规范的所有特性,包括内置10MHz 参考时钟、PXI 触发总线、星型触发和局部总线。 NIPXI-6624数据采集卡是用于PXI 系统的定时和数字I/O 模块[1]。该模块包括8个32位计数器/定时器,并带有通道间有光学隔离,可支持高达48VDC 的输入和输出信号。可运用NI PXI-6624来执行多种计数器/定时器的测量任务,包括事件计数,周期/频率测量,正交编码器定位测量,脉冲宽度测量,脉冲生成以及脉冲序列生成。其他应用包括:可再触发脉冲的生成、双信号边缘分离测量,连续缓冲事件计数,以及连续缓冲脉冲序列测量。PXI-6624为大量应用提供了性能可靠的高端特性,其行业覆盖了汽车/航天、工业/运动控制和制造测试。 SH100-100-F Cable 屏蔽线缆通过100针连接器或DAQPad-6508,连接至NI 6528、NI 6509、NI 651x ;其终端的100针0.050系列D 型连接器直接与100针附件相连。 SCB-100是一款屏蔽式I/O 接线盒,使用100针连接器将I/O 信号连往插入式DAQ 设备。与屏蔽式电缆配合使用,SCB-100可提供坚固且噪音极低的信号终端。 图2PXI-6624高频采集接线图 在利用PXI-6624采集卡测高频时,需要用两个计数器采集一路信号,因为PXI-6624采集卡有8个计数器,因此可以实现4路高频率信号 的同时采集。以计数器0和1构建CTR0通道高频率信号采集接线为例,计数器0的SOURCE +(1引脚)接待测信号正端,计数器0的SOURCE-(2引脚)接待测信号负端,计数器0的OUT (9引脚)接计数器 1的GATE+(13引脚)。同理以计数器2和计数器3构建CTR2通道、以计数器4和计数器5构建CTR4通道、以计数器6和计数器7构建CTR6通道实现多通道高频信号的同时采集,接线图如图2所示。 2.软件设计 软件分为两个部分:频率采集程序和监控程序。图形化编程语言LabVIEW 的独特优势为系统软件的开发提供了极大的推动力[2]。其提供的丰富图形控件以及图形化编程方法,使开发过程更加形象生动[3]。安装了驱动NI-DAQmx 后,丰富的范例程序极具参考价值,易于实现所需的数据采集和数据输出功能,确保了PXI 平台和驱动器的可靠数据交换。监控程序主要监测测试过程,保存、分析和显示测试结果。电流采集程序主要负责电流信号的输入输出以及滤波处理。频率信号采集软件图形化设计图如图3所示,其中设计了数据处理、存储系统以及显示功能,该程序可实现对单通道频率信号的采集。为了实现多通道频率信号的采集,可采用多个如上所述的程序同时运行而实现。 图3双计数器高频率采集程序框图 3.测试验证 为了验证测试系统的可行性,采用两个信号发生器作为信号源,信号发生器1生成173913Hz 的方波信号,信号发生器2生成9574Hz 的方波信号,信号1与CTR0连接,信号2与CTR2连接。利用上节所设计的两个频率信号采集通道,对两个频率信号进行采集测试。两路频率信号同时采集所得到的测试曲线如图4所示。通过观察分析,可以证明该频率信号采集测试系统能够实现多通道高频率信号的同时采集,且其所采集信号数据能够达到很好的精度。 图4双路频率信号同时采集曲线 4.结论 使用虚拟仪器软件LabVIEW ,结合先进的PXI 硬件平台及数据采集设备,在很短的时间内快速构建了基于PXI-6624的多通道频率信号采集测试系统。该系统实现了多通道频率信号的采集、显示、分析和存储,且能对多通道频率信号进行准确采集。参考文献 [1]NI PCI-6624,NI PXI-6624说明书.[2]杨乐平.LabVIEW 程序设计与应用[M ].北京:电子工业出版社,2004年. [3]岂兴明.LabVIEW 8.2中文版入门与典型实例[M ].北京:人民邮电出版社,2008. [4]武小花,张承宁,李司光,胡志敏.基于LabVIEW 的蓄电池充放电电流采集系统[J ].电力电子技术,2010,44(6):80-81. 基于NI PXI-6624的多通道高频率信号采集测试系统设计 广西工学院电子与信息与控制工程系黄丽敏 [摘要]在实际应用中,对于转速、位移、速度、流量等物理量的测量,传感器通常输出脉冲电信号,因此需要采用测量频率的手段实现。本文构建了基于NI PXI-6624的多通道频率信号采集测试系统,给出了系统设计框图以及软件程序设计框图,并利用信号发生器产生方波频率信号对系统进行了测试,经测试验证,该系统能够实现多通道频率信号的采集与显示,且具有良好精度。[关键词]LabVIEW 频率采集PXI-6624 基金项目:本文系广西工学院自然科学基金项目(1166201)。作者简介:黄丽敏(1982-),女,广西人,助教,工学学士, 主要从事测试系统研究。 — —9
数据采集系统的历史与发展
数据采集系统的历史与发展 数据采集系统起始于20设计50年代,1956年美国首先研究了用在军事上的测试系统,目标是测试中不依靠相关的测试文件,由非熟练人员进行操作,并且测试任务是由测试设备高速自动控制完成的。由于该种数据采集测试系统具有高速性和一定的 灵活性可以满足众多传统方法不能完成的数据采集和测试任务,因而得到了初步的认可。大约在60年代后期,国外就有成套的数据采集设备产品进入市场,此阶段的数据采集设备和系统多属于专业的系统。 20世纪70年代中后期,随着微型的发展,诞生了采集器,仪表同计算机溶于一 体的数据采集系统。由于这种数据采集系统的性能优良,超过了传统的自是这一类的 典型代表。这种接口系统采用积木式结构,把相应的接口卡装在专用的机箱内,然后 由一台计算机控制。第二类系统在工业现场应用较多。这两种系统中,如果采集测试 任务改变,只需将新的仪用电缆接入系统,或将新卡在添加的专业的机箱里即可完成 硬件平台中建,如果采集测试任务改变,只需将新的仪用电缆接入系统,或将新卡再 添加到专用的机箱即可完成硬件平台重建,显然,这种系统比专用系统灵活得多。20 世纪80年代后期,数据采集系统发生了极大的变化,工业计算机,单片机和大规模集成电路的组合,用软件管理,使系统的成本降低,体积减小,功能成倍增加,数据处 理能力大大加强。 20世纪90年代至今,在国际上技术先进的国家,数据采集技术已经在军事,航 空电子设备及宇航技术,工业等领域被广泛应用。由于集成电路制造技术的不断提高,出现了高性能,高可靠性的单片数据采集系统(DAS)。目前有的DAS产品精度已达16位,采集速度每秒达到几十万次以上。数据采集技术已经成为一种专门的技术,在工业领域得到了广泛的应用。该阶段数据采集系统采用更先进的模块式结构,根据不 同的应用要求,通过简单的增加和更改模块,并结合系统编程,就可扩展或修改系统,迅速地组成一个新的系统。该阶段并行总线数据采集系统高速,模块化和即插即用方 向发展,典型系统有VXI总线系统,PCI,PXI总线系统等,数据位以达到32位总线宽度,采用频率可以达到100MSps。由于采用了高密度,屏蔽型,针孔式的连接器和卡 式模块,可以充分保证其隐定性急可靠性,但其昂贵的价格是阻碍它在自动化领域取 得了成功的应用。 串行总线数据采集系统向分布式系统结构和智能化方向发展,可靠性不断提高。 数据采集系统物理层通信,由于采用RS485双绞线,电力载波,无线和光纤,所以其技术得到了不断发展和完善。其在工业现场数据采集和控制等众多领域得到了广泛的 应用。由于目前局域网技术的发展,一个工厂管理层局域网,车间层的局域网和底层 的设备网已经可以有效地连接在一起,可以有效地把多台数据采集设备联在一起,以 实现生产环节的在线实时数据采集与监控。
计算机软件开发的虚拟测试系统的制作方法
本技术公开了一种计算机软件开发的虚拟测试系统,包括流程控制单元、服务器和用户终端,所述流程控制单元、服务器、用户终端相互连接;所述流程控制单元包括提供测试所需参数的参数设置单元、提供不同测试脚本和测试环境的测试选择单元、提供整体测试的软件测试单元、提供单个功能测试的功能测试单元;所述服务器设置有用于测试报告日志编撰的日志生成单元和溶于日志结果记录的日志存储单元;本技术提供的系统,能够根据需要测试软件的不同,选择不同的测试环境、测试脚本,从而进行测试;且在测试过程中,能够根据测试提供相应的参数,工作效率更高,测试结果更加准确;同时还对测试结果生成报告,并予以保存,方便后续使用者进行查询。 技术要求 1.一种计算机软件开发的虚拟测试系统,其特征在于:包括流程控制单元(1)、服务器(2) 和用户终端(3),所述流程控制单元(1)、服务器(2)、用户终端(3)相互连接;所述流程控制单元(1)包括提供测试所需参数的参数设置单元(4)、提供不同测试脚本和测试环境的测试选择单元(5)、提供整体测试的软件测试单元(6)、提供单个功能测试的功能测试单元(7);所述服务器(2)设置有用于测试报告日志编撰的日志生成单元(8)和溶于日志结果记录的日志存储单元(9)。 2.根据权利要求1所述的一种计算机软件开发的虚拟测试系统,其特征在于:所述参数设置单元(4)对每组测设提供测试参数,每一项测试参数的设置数目不小于三组,且各组数 据互不相同,存在类型、数值上的差异。
3.根据权利要求1所述的一种计算机软件开发的虚拟测试系统,其特征在于:所述测试选择单元(5)所提供的选项包括测试脚本和测试环境,根据用户终端(3)向服务器(2)提供不同类型的待测试软件,提供不同的脚本。 4.根据权利要求3所述的一种计算机软件开发的虚拟测试系统,其特征在于:所述测试选择单元(5)提供的测试环境包括Windows系统环境、Mac系统环境、Unix系统环境、安卓系统环境以及iOS系统环境。 5.根据权利要求1所述的一种计算机软件开发的虚拟测试系统,其特征在于:所述软件测试单元(6)对待测试的软件整体进行分析,将其按功能进行分开,在功能测试单元(7)中对单个功能进行测试。 6.根据权利要求1所述的一种计算机软件开发的虚拟测试系统,其特征在于:所述功能测试单元(7)结合参数设置单元(4)提供的参数进行功能测试,测试结果、测试参数以及测试的源代码均通过流程控制单元(1)传递至服务器(2)中,服务器(2)在日志生成单元(8)中对功能测试生成日志报告。 7.根据权利要求1所述的一种计算机软件开发的虚拟测试系统,其特征在于:所述日志生成单元(8)中生成的日志报告,在日志存储单元(9)中进行存储,其存储时限为10个月。8.根据权利要求1所述的一种计算机软件开发的虚拟测试系统,其特征在于:所述流程控制单元(1)、服务器(2)、用户终端(3)之间的连接方式包括有线连接、无线连接、蓝牙连接和ZigBee连接。 9.根据权利要求1所述的一种计算机软件开发的虚拟测试系统,其特征在于:所述用户终端(3)设置有多个,用户终端(3)可以是智能手机、平板电脑和计算机。 技术说明书 一种计算机软件开发的虚拟测试系统 技术领域 本技术涉及计算机软件测试技术领域,具体为一种计算机软件开发的虚拟测试系统。
( VR虚拟现实)虚拟仿真实训系统解决方案
(VR虚拟现实)虚拟仿真实训系统解决方案
大娱号 虚拟仿真实训系统解决方案VSTATIONHD(V1.0)
前言 近年来,由于信息技术的快速发展与国家教育部门的大力提倡,虚拟仿真实训在高职教育中开始得到广泛的应用,成为实训教学重要的组成部分和提高教学质量的重要手段。虚拟仿真技术是将多媒体技术、虚拟现实技术与网络通信技术等信息技术进行集成,构建一个与现实世界的物体和环境相同或相似的虚拟教学环境,并通过虚拟环境集成与控制为数众多的实体,构成一个虚拟仿真教学系统。虚拟仿真教学技术以提高学生的技能水平为核心,具有多感知性、沉浸性、交互性、构想性等特点。这些特点有益于教师的实训教学和学生专业核心技能的训练,为解决职业教育面临的实训难、实习难和就业难等问题开辟了一条新思路。目前,高职院校很多专业,如外语教学、旅游专业、数控技术、焊接技术、机电技术、食品加工、服装设计等专业都引入了虚拟仿真实训教学方式。虚拟仿真实训教学,已经逐渐成为高职院校教学变革的一种有效手段。
目录 前言2 一、总体需求分析4 1.1 “情景”的定义:4 1.2 为什么要在教学中使用“虚拟仿真实训系统”?5 1.3 根据教学建设,用户需求归纳如下:6 二、设计原则7 三、大娱号虚拟仿真实训系统概述8 四、大娱号虚拟仿真实训系统系统运行原理示意图:10 五、大娱号虚拟仿真实训系统构成及特点11 六、与教材同步完备的虚拟场景库16 七、大娱号虚拟仿真实训系统构成及特点18 八、大娱号虚拟仿真实训系统配置与指标19 九、系统技术支持及服务21
一、总体需求分析 通过运用学语言,已经为越来越多的教师认同。学习者必须通过“用语言”才能真正掌握语言。 让学生置身于真实的交际情景中,让学生使用语言进行交际。而真正的交际应该是互动的。当一方发出信息后,另一方根据上下文进行意义协商,作出反馈,他可以表示支持、进行反驳或提出疑问,然后接受方对反馈意见再进行意义协商,作出回应,双方如此反复交流,形成互动。互动是“交际的核心”。 语言课堂就是一个充满“交流和互动”的场所。在课堂教学中,这种互动不仅包括师生互动和生生之间互动,还应该包括教材,因为课堂上的师生互动和生生互动都是基于一定教材展开的。“大娱号”虚拟仿真实训系统能够在教材与师生之间搭起一座互动教学的桥梁。 使用“虚拟仿真实训系统”在互动教学的设计和组织上突出情景性、实训性和互动性,力求三者有机结合。 1.1“情景”的定义: 情景指的是具体场合的情形或景象。在教学过程中引入或创设生动具体的场景,有利于学生进行意义建构使其产生交际的动机。“大娱号”虚拟仿真实训系统所提供的虚拟场景可以提供直观生动的形象,通过大屏或投影再现学生在虚拟场景中的表演,可以让学生通过视觉和听觉去感受场景,产生想象和联想,激发学生的学习兴趣。参与表演的学生可以身临其境的学语言,使用虚拟仿真实训系统教学,学生觉得有话可说,有戏可演,可以
ADAS驾驶辅助系统测试方案-风丘科技
ADAS驾驶辅助系统测试方案 随着ADAS驾驶辅助系统技术的快速发展以及在技术上的日臻成熟,ADAS在全球汽车市场近年来已开始快速普及和商业化,如何确保ADAS系统的可靠和安全已成为汽车领域的重要问题,因而ADAS驾驶辅助系统的测试也成为了各大整车厂及零部件厂商关注的热点。 ADAS的架构包括激光雷达、照相机、GPS等传感器、俯视的控制ECU以及传感器融合ECU。ADAS驾驶辅助系统的作用就在于将雷达、摄像头等传感器的数据与汽车本身的动力学参数等数据进行融合及运算分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。对于ADAS驾驶辅助系统的测试而言,需要做的就是把这些数据记录下来,然后进行处理,进而纠正控制策略。
ADAS测试面临的挑战: 以Google智能汽车简图为例,它包含64束的激光雷达、车载雷达、2个照相机、2个红外照相机、GPS定位装置等传感器。在进行ADAS驾驶辅助系统测试时,首先就需要将所有的这些数据记录下来,从而对测试带来了如下挑战: 1)融合各种传感器数据,如图像、雷达; 2)采集数据量大,高达4T/天。风丘科技与众多整车厂及零部件客户做过计算,大致1天需要记录存储大约4T的数据,一般的设备很难记录下来,而且对数据存储的时间有很高的要求; 3)不同车辆上的数据采集同步。在做一些测试的时候,如ACC跟车,需要在2台车上进行同步采集; 4)车辆状态采集。如车辆的加减速度等; 5)高精度的GPS; 风丘科技的ADAS测试方案: 为了解决ADAS测试面临的以上问题,风丘科技携手德国IPETRONIK共同推出如下方案: 1、德国CAETEC品牌ARCOS记录仪:支持GPRS、以太网、USB等。车上的摄像头可直接连 接ARCOS,从而采集数据。 2、对于激光雷达和毫米波雷达,可通过CAN协议采集数据。 3、高精度的GPS:对GPS进行标定,目前已达到2cm的精度。 4、传统的数据采集:M-sense、M-CNT模块以及传感器;也可以通过总线如CAN总线、LIN 总线等在车辆上进行数据采集。
姿态传感器采集测试系统的设计与实现_毕盛
计算机测量与控制.2011.19(7) Computer Measurement &Control 自动化测试 收稿日期:2010-11-06; 修回日期:2010-12-16。 基金项目:国家自然科学基金资助项目(60873078);广州市科技计划项目(2009KP008)。 作者简介:毕 盛(1978-),男,甘肃天水人,博士研究生,主要从事机器人及姿态传感器信息处理方向的研究。 文章编号:1671-4598(2011)07-1562-03 中图分类号:T P212 文献标识码:A 姿态传感器采集测试系统的设计与实现 毕 盛,闵华清,李 淳,黄斐全,陈必强 (华南理工大学计算机科学与工程学院,广东广州 510640) 摘要:设计了一套基于ST M 32单片机的姿态传感器无线采集测试系统,大大方便了姿态传感器的研究与应用。首先设计了姿态传感器采集测试系统的整体框架;接着对测试系统的各部分硬件电路进行了说明,描述了ADXL204加速度和ADXRS150陀螺仪传感器的电路和计算公式,并说明了ST M 32单片机和PC 上位机程序的结构和流程;最后利用本测试系统对ADXL204和ADXRS150传感器进行了测试和分析;通过对这两种传感器数据进行卡尔曼滤波,消除陀螺仪的漂移,同时减少了加速度传感器有害的噪声,从而得到精确的角度。 关键词:陀螺仪;加速度传感器;姿态传感器 Design and Realization of Attitude Sensor Estimation System Bi Sheng,M in H uaqing,Li Chun,H uang Feiquang,Chen Biqiang (School of Computer Science and Eng ineer ing,South China U niver sity o f T echno log y,Guangzhou 510640,China) Abstract:A w ireless attitude s ensor acquisition an d estimation sy stem w as designed based on the n ew gen eration m icroprocessor called S TM 32,w hich made attitude sensor easily u sed.Firstly,the fram ew ork of th e s ystem w as proposed.T hen the system hardw are,tw o kin ds of attitude sensors (ADXL204and ADXRS150)hardw are and equation w ere described.And th e s oftw are proces ses and s tru cture of ST M 32M CU an d PC w ere presented.Finally ADXL204and ADXRS150w ere tested in our system.T hrough the Kalm an filtering fus ion equ ation of th e tw o kinds of s ens or s,th e noise w as reduced. Key words :gyros cope;acceler om eter;attitude s ens or 0 引言 在机器人平衡控制、汽车定位和捷联惯导等许多领域中需要获得载体姿态信息,姿态传感器应用越来越广泛[1-2]。需要专门的测试平台来对姿态传感器的性能进行测试和分析,而针对这方面的设计和研究还很少。本文设计出一套姿态传感器测试系统,通过无线蓝牙模块实现对姿态传感器的控制和数据的采集,方便对移动物体上的姿态传感器数据进行分析和研究。 1 系统框架 姿态传感器主要包括加速度传感器和陀螺仪。加速度传感器也叫倾角传感器,通过重力加速度可得到姿态倾斜角。陀螺仪也叫做角速度传感器用来测量姿态的角速度。目前,A DI 公司、Freescale 公司和ST 公司等都开发出了一系列的姿态传感器芯片。 文中主要对A DI 公司的A DXL 204加速度传感器和ADX RS150陀螺仪传感器的数据处理进行了分析和研究。 整个系统采用Cortex -M 3核的ST M 32单片机 [3]作为主芯片,控制舵机使姿态传感器转动到设定的角度,同时采集姿态传感器的数据到主芯片 ,然后利用蓝牙模块把姿态传感器测量的姿态数据无线传送给上位机,最后上位机把测量到的姿态数据处理后和设定的姿态数据进行比较,从而可对姿态传感器数据采集和处理方法进行分析和研究,如图1所示。 图1 姿态传感器测试系统 姿态数据采集测试系统框架图如图2所示。 图2 姿态数据采集测试系统框图 上位PC 机通过蓝牙模块向ST M 32单片机发送指令,使ST M 32单片机控制舵机带动姿态传感器以一定的速度转到一定的角度,同时通过ST M 32单片机采集姿态传感器数据,最后通过蓝牙模块把采集到的数据送给上位PC 机,PC 机会把采集的数据保存下来。最后可利用M atlab 软件对采集到的数据进行处理从而可计算出姿态转动的角度,并和设定的姿态角度进行比较。从而对姿态传感器的测量数据和处理方法进行分析和比较。 2 系统的硬件设计 系统硬件整体框图,如图3所示。211 MC U 模块 ST M 32单片机[3]是ST 公司采用A RM Cortex -M3体系结构 #1562#