电流滞环比较PWM控制方法探析
电流滞环比较PWM控制方法探析
尹发根
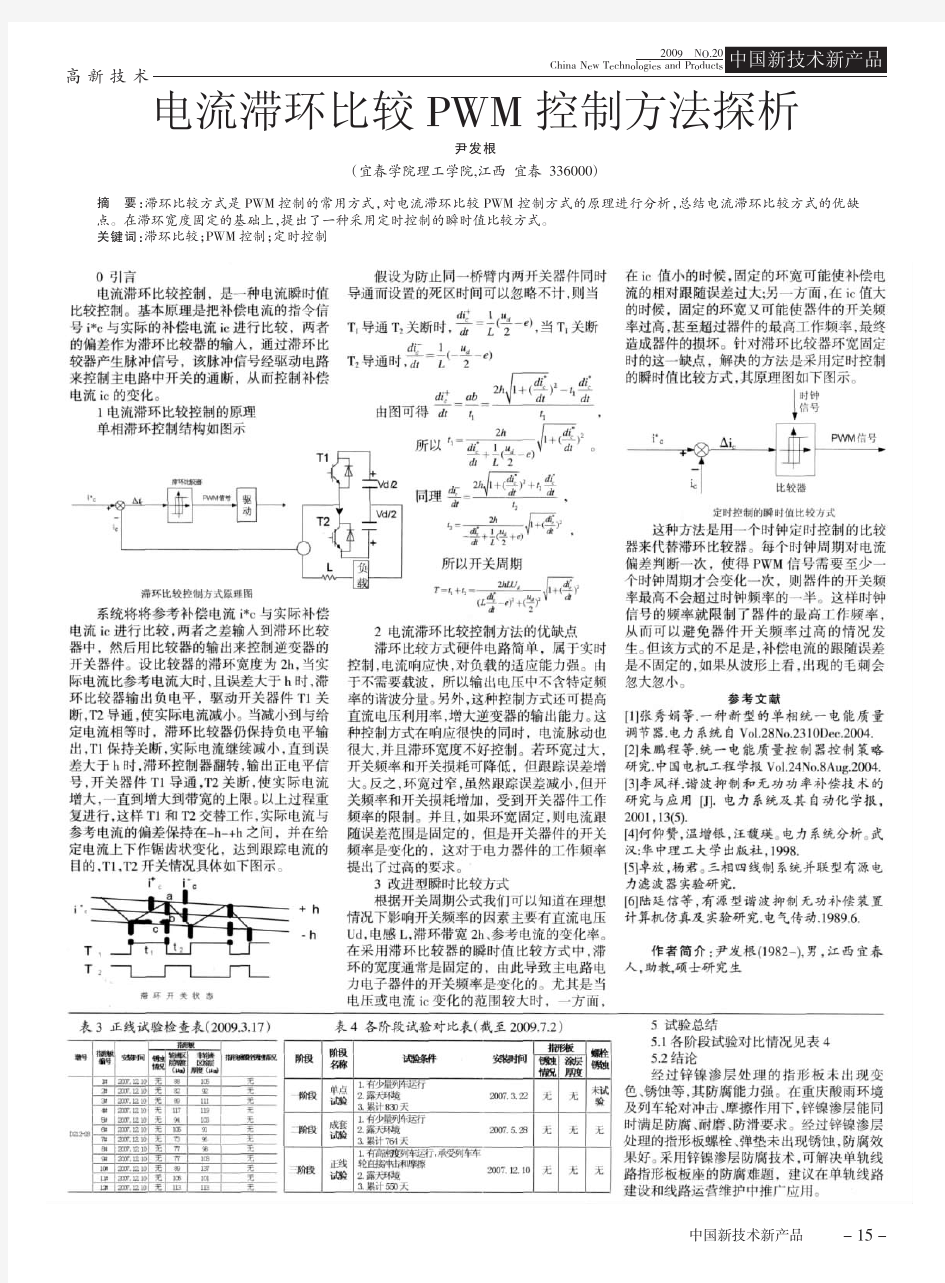
【摘要】滞环比较方式是PWM控制的常用方式,对电流滞环比较PWM控制方式的原理进行分析,总结电流滞环比较方式的优缺点.在滞环宽度固定的基础上,提出了一种采用定时控制的瞬时值比较方式.
【期刊名称】《中国新技术新产品》
【年(卷),期】2009(000)020
【总页数】1页(P15)
【关键词】滞环比较;PWM控制;定时控制
【作者】尹发根
【作者单位】宜春学院理工学院,江西,宜春,336000
【正文语种】中文
【中图分类】工业技术
高新技术LUUY lNU./U ChinaNewTechnologiesandProducts电流滞环比较 PWM 控制方法探析尹发根(宜春学院理工学院,江西宜春 336000 )摘要:滞环比较方式是 PWM 控制的常用方式,对电流滞环比较 PWM 控制方式的原理进行分析,总结电流滞环比较方式的优缺点一在滞环宽度固定的基础上,提出了一种采用定时控制的瞬时值比较方式、关键词:滞环比较: PWM 控制;定时控制 0 引言电流滞环比较控制,是一种电流瞬时值比较控制。基本原理是把补偿电流的指令信号 itc 与实际的补偿电流 ic 进行比较,两者的偏差作
电压环与电流环设计
控制电路设计 一、电流环的设计 电流环的设计核心是控制主电路上电感电流的平均值,使它处于稳定状态,根据主电路与设计思路得电流控制环的系统框图如下: 其中Vcv 为电压环的输出电压(即系统的参考电压),Vs 为锯齿波的幅值,IL 为电感上的电流,K1为采样的放大倍数。设置PI 为单零点—单极点补偿网络。如下图所示: 因为系统的开关频率为100KHZ ,为了避免开关频率对控制环路的影响,穿越频率fci 必须远远小于开关频率,当然为了对系统动态响应的速度,我们希望fci 越大越好,在一般的开关电源中,fci 都小于开关频率的1/10,此处我们设置为开关频率的1/10,即10KHZ 。补偿网络的传递函数为:211111()R C S G s R C S += , 由系统框图可以得系统的开环传递函数为:21211(1)11()1S R C S G S K R C S V SL +=, 式中:Vs=5V ;L=15uH; K1=1/100; S=jw;代入上式,当fci=10KHz 时,2()G S =1,令补偿零点角频率1211w R C = 在fci/2处,即1211w R C ==5KHz ,经计算得11R C =62.710-?,21R C =4210-?,所以21 R R =74,令1R =1K ,得2R =74K ,1C = nf, 代入得开环传递函数为:2245000()/10 S G S S -+= ,经MATLAB 画出BODE 图如下: 从上图可以看出,在(1/2)fci 频率处,开环传递函数的斜率由-40dB 变成-20dB ,可以达到较快的动态响应,由于传递函数以-20dB 的斜率穿越0dB
滞环控制
电流滞环跟踪PWM(CHBPWM)控制技术的仿真 桂寒 120100068 摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink 工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。 关键词:电流滞环控制 脉宽控制 滞环宽度控制法 1. 前言 2. 应用PWM 控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM 控制技术都是以输出电压近似正弦波为目标的。但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。 2. 电流滞环跟踪控制原理 2.1 单相电流滞环控制原理 常用的一种电流闭环控制方法是电流滞环跟踪 PWM (Current Hysteresis Band PWM ——CHBPWM )控制,具有电流滞环跟踪 PWM 控制的 PWM 变压变频器的A 相控制原理如1图所示。 图1 电流滞环跟踪控制的A 相原理图 图中,电流控制器是带滞环的比较器,环宽为2h 。将给定电流 *a i 与输出电流 a i 进行比较,电流偏差 ? a i 超过时 ±h ,经滞环控制器HBC 控制逆变器 A 相上(或下)桥臂的功率器件动作。B 、C 二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。
? 如果, a i < *a i , 且*a i - a i ≥ h ,滞环控制器 HBC 输出正电平,驱动上桥臂功 率开关器件V1导通,变压变频器输出正电压,使a i 增大。当增长到与*a i 相等时,虽然滞环比较器的输入信号的符号发生了变化,但HBC 仍保持正电平输出,保持导通,使a i 继续增大 ? 直到达到a i = *a i + h , a i = –h ,使滞环翻转,HBC 输出负电平,关断V1 ,并经过延时后驱动V4,直到电流的负半周V4才能导通。 但此时未必能够导通,由于电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时ia=ia*-h ,到达滞环偏差的下限值,使HBC 再翻转,又重复使V1导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。从图 2 中可以看到,输出电流是十分接近正弦波的。 图2 电流滞环跟踪控制时的电流波形 图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和电机的反电动势有关。 2.2 三相电流滞环控制原理 图3 三相电流跟踪型PWM 逆变电路
伺服电机速度环、位置环、扭矩环的控制原理
运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。 1、电流环:电流环的输入是速度环PID调节后的那个输出,电流环的输入值和 电流环的反馈值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。任何模式都必须使用电流环,电流环是控制的根本,在系统进行速度和位置控制的同时系统也在进行电流/转矩的控制以达到对速度和位置的相应控制。 2、速度环:速度环的输入就是位置环PID调节后的输出以及位置设定的前馈 值,速度环输入值和速度环反馈值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出到电流环。速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。速度环控制包含了速度环和电流环。 3、位置环:位置环的输入就是外部的脉冲,外部的脉冲经过平滑滤波处理和 电子齿轮计算后作为“位置环的设定”,位置环输入值和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分调节)后输出和位置给定的前馈值的和构成速度环的给定。位置环的反馈也来自于编码器。位置控制模式下系统进行了3个环的运算,系统运算量大,动态响应速度最慢。
编码器安装于伺服电机尾部,它和电流环没有任何联系,他采样来自于电机的转动而不是电机电流,和电流环的输入、输出、反馈没有任何联系。而电流环是在驱动器内部形成的,即使没有电机,只要在每相上安装模拟负载(例如电灯泡)电流环就能形成反馈工作。 三种控制模式 位置控制:通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的数量来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。应用领域如数控机床、印刷机械等等。 速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。 转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。 PID各自对差值调节对系统的影响: 1、单独的P(比例)就是将差值进行成比例的运算,它的显著特点就是有差调节,有差的意义就是调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差,残差具体值您可以通过比例关系计算出。增加比例将会有效减小残差并增加系统响应,但容易导致系统激烈震荡甚至不稳定。
电流滞环跟踪PWM(CHBPWM)控制技术的仿真要点
目录 摘要 (1) 关键词 (1) 一、电流滞环跟踪控制原理 (2) 二、三相电流滞环跟踪控制系统的仿真 (5) 1、建立系统仿真模型 (5) 2、模块参数设置 (6) 3、电路封装 (8) 4、作图程序设计 (10) 三、仿真波形及频谱分析 (12) 四、仿真结果分析与总结 (18) 1、仿真波形比较 (18) 2、电流频谱分析比较 (19) 3、相电压、线电压频谱分析比较 (19) 4、总结 (19) 五、课设心得体会 (20) 六、参考文献 (21)
摘要: 滞环控制是一种应用很广的闭环电流跟踪控制方法,通常以响应速度快和结构简单而著称。在各种变流器控制系统中,滞环控制单元一般同时兼有两种职能,一则作为闭环电流调节器,二则起着PWM调制器的作用,将电流参考信号转换为相应的开关指令信号。然而,滞环控制的开关频率一般具有很大的不定性,高低频率悬殊,其开关频率范围往往是人们在进行滞环控制系统设计师比较关心的重要方面,只有明确开关频率的计算方法,才便于进行开关器件、滤波参数及滞环控制参数的选择。 电流跟踪型逆变器输出电流跟随给定的电流波形变化,这也是一种PWM控制方式。电流跟踪一般都采用滞环控制,即当逆变器输出电流与给定电流的偏差超过一定值时,改变逆变器的开关状态,使逆变器输出电流增加或减小,将输出电流与给定电流的偏差控制在一定范围内。 关键词:电流滞环跟踪PWM、闭环控制、滞环控制器HBC、环宽、电流偏差、开关频率、响应波形、频谱图
一、电流滞环跟踪控制原理 常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。 图1 电流滞环跟踪控制的A相原理图 图中,电流控制器是带滞环的比较器,环宽为2h。将给定电流i*a 与输出电流i a进行比较,电流偏差?i a超过时±h,经滞环控制器HBC 控制逆变器A相上(或下)桥臂的功率器件动作。B、C二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图4。 ?如果,i a < i*a ,且i*a - i a ≥h,滞环控制器HBC输出正电平, 驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增 大。当增长到与相等时,虽然,但HBC仍保持正电平输出,保持 导通,使继续增大 ?直到达到i a= i*a+ h,?i a = –h,使滞环翻转,HBC输出负电 平,关断V1 ,并经延时后驱动V4 但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而
电流滞环跟踪spwm
课程设计(论文)任务书 电气与电子工程学院电力牵引与传动专业班一、课程设计(论文)题目:电流滞环跟综PWM(CHBPWM)控制技术的仿真 二、课程设计(论文)工作自 2013年6月16日起至2013年6月21日止。 三、课程设计(论文) 地点: 电气学院机房 四、课程设计(论文)内容要求: 1.本课程设计的目的 (1)熟练掌握MATLAB语言的基本知识和技能; (2)熟悉matlab下的simulink和simpowersystems工具箱; (3)熟悉构建三相电流跟踪滞环控制系统的仿真模型; (4)培养分析、解决问题的能力;提高学生的科技论文写作能力。2.课程设计的任务及要求 1)基本要求: (1)要求对主电路和脉冲电路进行封装; (2)仿真参数为:E=100-300V; f=50HZ; 带宽2h; 步长h=0.0001s,其他参数自定; (3)给出调制波原理图、相电压、相电流、线电压、不同器件所承受的电压波形以及频谱图,要求采用subplot作图; (4)选取不同参数进行仿真,比较仿真结果有何变化,给出自己的结论。2)创新要求: 封装使仿真模型更加美观、合理 3)课程设计论文编写要求 (1)要按照课程设计模板的规格书写课程设计论文 (2)论文包括目录、正文、心得体会、参考文献等 (3)课程设计论文用B5纸统一打印,装订按学校的统一要求完成 4)答辩与评分标准: (1)完成原理分析:20分; (2)完成设计过程:40分; (3)完成调试:20分; (4)回答问题:20分; 5)参考文献: (1)刘卫国.MATLAB程序设计与应用(第二版). 北京:高等教育出版社,2008. (2)刘志刚.电力电子学.北京:清华大学出版社、北京交通大学出版社,2004.
电流环速度环位置环
电流环速度环位置环 Standardization of sany group #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#
电流环是以电流信号作为反馈信号的控制环节。 速度环是以速度信号作为反馈信号的控制环节。 位置环是以位置信号作为反馈信号的控制环节。 电流环为最内环,在数控机床的伺服系统中它主要起到提高系统的机械特性的作用。其反馈元件一般为电流互感器。 速度环在电流环外面,在数控机床的伺服系统中它主要起到控制转速的作用。其反馈元件一般为模拟测速机或编码器。 位置环在速度环的外面,在数控机床上就是数控系统的位置控制单元。其反馈元件一般为编码器、光栅尺、感应同步器、旋转变压器等。 数控的驱动由电流环,速度环和位置环组成的,其优化一般由里及外层层优化,但由于电流环的参数在电机和功率模块的型号确定后用厂家的默认参数即可,一般不需要优化,故优化时先优化速度环,再优化位置环即可. 速度环的优化,一般涉及到速度环增益和速度环时间常数,速度环时间常数越大和增益越低,速度环越稳定,但精度和动态特性越差,一般来说,速度环时间常数设在10ms左右,而速度环增益调整在使速度环的阶约响应有20-40的超调.
位置环的优化涉及到位置环增益和加速度,调整时先可以减少加速度值,再增加位置环增益值,保证系统稳定,然后在适当增加加速度值,使之适应机床的机械特性,注意同一组的插补轴的位置环增益要一致,否则会影响加工精度 电流环和速度环属于伺服控制系统的内部双闭环控制。 位置环为数控机床位置控制环,通过数控系统和伺服系统共同控制,使伺服轴运动到数控系统指定的坐标,并在数控系统的屏幕上显示坐标值。 先将电流内环调稳,再调速度外环。 “电流在一个小的范围震荡,电机在低速时有一定振颤”——这个震荡误差带是多大小范围的震荡是允许的。 有几句口诀可以供你调试参考: PID常用口诀:参数整定找最佳,从小到大顺序查,先是比例后积分, 最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾, 比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长, 积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,
电流滞环跟踪PWM仿真
题目七电流滞环跟踪PWM(CHBPWM)控制技术 的仿真 摘要:电流滞环跟踪PWM(CHBPWM)控制技术的仿真所采用的器件简单,利用simulink工具分析了在电流跟踪控制中采用滞环宽度并讨论了滞环宽度与开关频率和控制精度之间的关系,给出了各波形。 关键词:电流滞环控制脉宽控制滞环宽度控制法 一、前言 应用PWM控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,为此前面两小节所述的PWM控制技术都是以输出电压近似正弦波为目标的。但是,在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。 二、电流滞环跟踪控制原理 常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。 图1 电流滞环跟踪控制的A相原理图
图中,电流控制器是带滞环的比较器,环宽为2h。将给定电流i*a 与输出电流i a进行比较,电流偏差?i a超过时±h,经滞环控制器HBC 控制逆变器A相上(或下)桥臂的功率器件动作。B、C二相的原理图均与此相同。采用电流滞环跟踪控制时,变压变频器的电流波形与PWM 电压波形示于图6-23。 ?如果,i a < i*a ,且i*a - i a ≥h,滞环控制器HBC输出正电平, 驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增 大。当增长到与相等时,虽然,但HBC仍保持正电平输出,保持 导通,使继续增大 ?直到达到i a= i*a+ h,?i a = –h,使滞环翻转,HBC输出负电 平,关断V1 ,并经延时后驱动V4 但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时,,到达滞环偏差的下限值,使HBC 再翻转,又重复使导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在正弦波上下作锯齿状变化。从图2 中可以看到,输出电流是十分接近正弦波的。 图2 电流滞环跟踪控制时的电流波形 图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和
电流环控制原理分析
电流环控制原理分析 电流环是使电机以恒定的电流运转,以产生恒定的加速力矩。这对于转动惯量大的电机来说比较重要,它可以使电机一直以固定的电流驱动电机运转,驱动电流不会因为转速的升高下降。 ?要进行电流控制,首先必须时刻监控电机工作电流,因此电流传感器是伺服系统中的一个重要元件,它的精度和动态性能直接影响着系统的低速性能和快速性。电流检测的方法有电阻检测、光耦检测等各种不同的检测方法,本系统采用磁平衡原理实现的霍尔元件检测电流的方法,检测电源母线电路电流。采用的元器件为霍尔效应磁场补偿式电流传感器,此器件被国际上推荐为电力电子线路中的关键电流检测器件。它把磁放大器、互感器、霍尔元件和电子线路的思想集成一体,具有测量、反馈、保护的三重功能。实际是有源电流互感器,它最巧妙的构思是“磁场补偿”。被测量的原边磁场同测量绕组里的测量磁动势,时时补偿为零。即铁心里面实际没有磁通,因而其体积可以做得很小,而不用担心铁心饱和,也不用担心频率、谐波的影响。它的磁动势能补偿原理是利用霍尔效应的作用,当二者磁动势能不平衡时,霍尔元件上会产生磁动势,此磁动势作为以±15Y外加电源供电的差分放大器的输入信号,放大器的输出电流即为传感器的测量电流,自动迅速地恢复磁动势平衡,即霍尔输出总保持为零。这样,测量电流的波形忠实地反映了原边被测电流的波形,其大小只是一个匝比的关系。 ?具体说来,霍尔效应磁场补偿式电流传感器具有以下优点: ?它克服了传统的电流取样元件受规定频率、规定波形的限制及不适应功率变频发展,波形常不标准的缺点。它响应频率的带宽为0~100kHz,对任何波形,特别是含有直流分量的信号都可以迅速响应,符合电力电子技术,包
电流滞环控制pwm
电流滞环控制的三相PWM逆变器仿真 11级三班8号XX 摘要 针对传统的SPWM电压型逆变器的不足,提出采用电流滞环跟踪PWM的逆变器控制方式。介绍了电流滞环跟踪PWM逆变器的控制原理,对其开关频率进行了数学分析,最后构建模型并进行仿真。仿真结果表明,此方法效果明显,动态性能好,可保证电流波形好的正弦性。 关键词:电流滞环控制、三相PWM逆变器、开关频率、simulink 一、引言 三相PWM逆变器中的滞环电流控制因其控制方式简单、易于硬件实现、工作可靠、无跟踪误差、动态响应快等优点,得到了广泛的重视与应用。PWM(Pulse Width Modulation)控制技术的变压变频器一般都是电压源型的,它可以按需要方便地控制其输出电压,但是在电流电机中,实际需要保证的应该是正弦波电流,因为在交流电机绕组中只有通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不含脉动分量。因此,若能对电流实行闭环控制,以保证其正弦波形,显然将比电压开环控制能够获得更好的性能。 电流滞环跟踪控制方法的精度高,响应快,且易于实现。但受功率开关器件允许开关频率的限制,仅在电机堵转且在给定电流峰值处才发挥出最高开关频率,在其他情况下,器件的允许开关频率都未得到充分利用。为了克服这个缺点,可以采用具有恒定开关频率的电流控制器,或者在局部范围内限制开关频率,但这样对电流波形都会产生影响。 二、电流滞环跟踪控制原理 2.1电流滞环控制原理 常用的一种电流闭环控制方法是电流滞环跟踪PWM(Current Hysteresis Band PWM ——CHBPWM)控制,具有电流滞环跟踪PWM 控制的PWM 变压变频器的A相控制原理如1图所示。
基于SVPWM电机控制系统中电流环的设计
基于SVPWM电机控制系统中电流环的设计 摘要:介绍了SVPWM机理,设计了伺服电机的电流环控制的软硬件方案,对电流环伺服控制策略进行了研究,分析了电流采样原理,并对电机驱动中逆变器的死区补偿问题做了一些探讨,最后详细介绍了电流环中断的软件实现方法。 关键词:空间矢量脉宽调制; 逆变器; 死区补偿 Design of Current Loop for Motors Control System Based on SVPWM SUN Jie , LUAN Zhong-quan Abstract : Introduce the SVPWM, design the software and hardware sche me of current loop in servo motor, study the control strategy, analyze the cu rrent sampling, and do some research to keep the force ripple of load moto r and compensate death-time in motor inverter. At last, the software realizati on plan about current loop interruption was focused on. Key words : space vector pulse width modulation (SVPWM) ; inverter ; d ead-time compensation 0 引言 近十几年来,DSP控制器广泛应用于电机控制中。TI公司的TMS320F2 812 DSP具有更完备的外围控制接口和更丰富的电机控制外设电路。它的事件管理器(EV)含有硬件SVPWM产生电路。产生SVPWM具有硬件结构简单, 控制精度高, 实时性强, 软件编程容易等优点。电机控制策略主要采用三闭环控制,位置环、速度环和电流环。他们的主要的作用是使误差越来越少,使控制精度更高更准确更迅速并实现自动控制。其中电流控制环是一个内环, SV PWM控制算法的实现主要集中在电流环上。在一个电流环周期内需完成反馈电流的采样、电压死区补偿和输出电压等运算。它的性能指标好坏, 特别是动态特性, 将全面影响速度环和位置环, 从而影响整个伺服系统。 1 SVPWM与电机的电流环控制 在电机变频调速中,脉宽调制技术已经得到了广泛的应用。而空间矢量脉宽调制(SVPWM)方法与经典的脉宽调制方法相比,具有直流电压利用率高、控制简单、损耗较小、便于数字化方案实现等优点,广泛应用在电机控制中。 1.1 SVPWM机理 空间矢量PWM 指的是三相功率逆变器中的六个功率管的一种特殊的开关方式。空间矢量PWM 方法的实质就是利用六个功率管 的八种开关组合方式给出电机的供电电压向量。通过α -β坐标变换,把8种状态组合对应的相电压映射到α-β坐标平面,即将( a, b, c) 3个向量垂直映射到一个二维坐标(α-β坐标) , 这样就可以得到6个非零向量和2个零向量. 6个非零向量构成一个六边形, 相邻向量之间的夹角为60°, 2个零向量处于原点,如图1所示.
直流电机的转速电流双闭环控制
直流电机的转速电流双闭 环控制 The final edition was revised on December 14th, 2020.
直流电机的转速电流双闭环控制 摘要:本设计主要采用模拟电路实现直流电机控制的整流电源,转速调PI调节器,电流PI调节器的设计。来实现对电机转速的控制,包括快速起动、恒速运行、堵转截止三大目标。该设计的主要电路均采用模拟电路实现,电流环的PI 调节器用于保证快速起动,即保证电机起动时以最大负载电流起动,也即实现以最大加速度实现。而转速调节器则用于在运行时实现转速恒定,保证带负载的能力。两个PI调节器都采用集成运放实现。其主要优点是克服传统意义上单环控制只能满足一方面的要求的缺陷。 关键词:电流环;转速环;PI调节器 The Rotate Speed and Current Double Closed Loop Feedback Control for DC Motor Abstract: The major tasks of this design is utilizing simulating circuits to produce the rectifiering power source ,current PI regulator and rotate speed PI regulator for the DC major object of this desigen is making the DC motor started rapidly,rotating making the DC motor started rapidly with the largest load is the same to starting rapidly with the largest ,The rotate speed PI regulator make the DC mortor retated stably to any the change of the load .Both of the PI regulators use the integrated amplifier operator to accomplish the priority of this design are overcoming the defect of traditional single feedback loop. Key word: current feedback loop; rotate speed feedback loop;PI regulator
复矢量电流环控制
U s=U d+jU q(1) i s=i d+ji q(2) PMSM的电压方程为: U q=L q pi q+R s i q+ωr L d i d+ωrφf(3) U d=L d pi d+R s i d?ωr L q i q(4) 其中,φf为转子磁链;p为微分算子dx dt ;ωr为电磁转速;ωr=P n?ωn;P n为电机极对数;ωn为转子机械旋转转速;由PMSM特性可得L d=L q=L 将(1) (2)代入(3) (4)可得到: U s=R s i s+p+jωr L×i s+jωrφf(5) 考察i s/U s的传递函数,视jωrφf项为与ωr相关的扰动项,则PMSM的电压方程可用复矢量表示为: i s U s =1 R s+jωr L+Ls (6) 存在一个复数极点,P0=?R s L ?jωr 以上为被控对象的复矢量建模分析,下面为电流环控制器设计推导: 为实现永磁同步电机的解耦控制,设计复矢量PI调节器,实现与控制对象的极点对消,PI调节器的形式如下: U′s e is =k p[1+ 1 i +jωr s ] (7) 其中,e is=i sr?i s,i sr为给定电流,i s为反馈电流。 该传递函数的零点为Z0=?1 T i ?jωr 当T i=L R s 时,零极点对消,框图如下 e s U'
反电动势耦合项e =jωr φf ,通过前馈解耦。 即:U s =U′s +e =U′s + jωr φf s U ' r f s U 具体实现方法: 反馈支路:经过坐标变换将i d 、i q 组合成矢量i s =i d +j i q 命令支路:i dr =0,i qr 为实际给定,i sr =i dr +ji qr 原先dq 轴两路PI 调节器合并成一个复矢量PI 调节器,即为 k p [1+1 T i +jωr s ] 此调节器输出U′s 再加上反电势前馈补偿项e ,得到最终的控制量输出U s ,在不 修改现有SVPWM 模块的前提下,将U s 投影分解成U d 和U q 即可。 以上方案可作为复矢量电流环实现的评估参考。
变频器电流跟踪PWM控制
摘要 本设计中采用得最多的是控制技术是脉冲宽度调制(PWM),其基本思想是:控制逆变器中电力电子器件的开通或关断,输出电压为幅值相等、宽度按一定规律变化的脉冲序列,用这样的高频脉冲序列代替期望的输出电压。传统的PWM技术是用正弦波来调制等腰三角波,称为正脉冲宽度调制,随着控制技术的发展,产生了电流跟踪PWM(CFPWM)控制技术。CFPWM的控制方法是:在原来主回路的基础上,采用电流闭环控制,使实际电流快速跟随给定值,在稳态时,尽可能使实际电流接近正弦波。 最后利用利用Matlab/Simulink对整个系统进行仿真,并对仿真结果进行分析。 关键词:异步电机;电流控制;脉宽调制;CFPWM。
目录 摘要.......................................................................................................... Ι1 设计任务和要求 (3) 1.1 设计任务 (3) 1.2 任务要求 (3) 2 总体设计 (4) 2.1 系统组成框图 (4) 2.2 电流滞环跟踪控制原理 (5) 2.3 滞环宽度分析 (6) 2.4 电流滞环跟踪控制的特点 (8) 3 电流的滞环跟踪控制的simulink的仿真 (9) 3.1 仿真软件介绍 (9) 3.2 单相电流跟踪控制逆变器仿真 (9) 3.3 三相电流跟踪滞环控制仿真 (12) 3.4 仿真结果分析 (16) 4.总结 (16) 参考文献 (17)
1 设计任务和要求 1.1 设计任务 设计一通用型变频器的主电路和控制电路组成系统,对异步电机进行变频调速,完成变频器主电路设计,主电路可选用交-直-交结构,进行参数计算和器件选型。完成变频器控制电路设计,对逆变部分控制方式采用电流跟踪控制(CFPWM)。利用Matlab/Simulink对整个系统进行仿真,并对仿真结果进行分析。 1.2 任务要求 (1)主电路选择、参数计算及器件选型。 (2)控制电路选择、参数计算及器件选型。 (3)运用MA TLAB/Simulink软件进行仿真,校验。
电流滞环控制
摘要 脉冲宽度调制(PWM),其基本思想是:控制逆变器中电力电子器件的开通或关断,输出电压为幅值相等、宽度按一定规律变化的脉冲序列,用这样的高频脉冲序列代替期望的输出电压。传统的PWM技术是用正弦波来调制等腰三角波,称为正脉冲宽度调制,随着控制技术的发展,产生了电流跟踪PWM(CHBPWM)控制技术。CHBPWM的控制方法是:在原来主回路的基础上,采用电流闭环控制,使实际电流快速跟随给定值,在稳态时,尽可能使实际电流接近正弦波。 关键词:电流控制;脉宽调制; CHBPWM;
1.前言 SPWM控制技术以输入电压接近正弦波为目的,电流波形则因负载的性质及大小而异。然而对于交流电机来说,应该保证为正弦波的是电流,稳态时在绕组中通入三相平衡的正弦电流才能使合成的电磁转矩为恒定值,不产生脉动,因此以正弦波电流为控制目标更为合适。电流跟踪PWM(Current Follow PWM, CHBPWM)的控制方法是:在原来主回路的基础上,采用电流闭环控制,使实际电流快速跟随给定值,在稳态时,尽可能使实际电流接近正弦波形,这就能比电压控制的SPWM获得更好的性能。 电流跟踪控制的精度与滞环的宽度有关,同时还受到功率开关器件允许开关频率的制约。在实际使用中,应在器件开关频率允许的前提下,尽可能选择小的宽度。电流滞环跟踪控制方法的精度高、响应快,且易于实现,但功率开关器件的开关频率不定。为了克服这个缺点,可以采用具有恒定开关频率到的电流控制器,或者局部范围内限制开关频率,但这样对电流波形都会产生影响。 2.原理 2.1.电流滞环跟踪控制原理 现在以A相电流滞环跟踪控制为例,其控制结构图如下图 2-1 所示: 图1-1 电流跟踪控制A相原理图 其中电流控制器是带滞环的比较器,环宽为h,将给定电流ia与输出电流i*a进行比较,电流偏差△ia 超过±0.5h 时,经滞环控制器(HBC)控制逆变器 A 相上、下桥臂的功率开关器件动作。 设比较器的滞环宽度为h,当输出电流i*a比给定电流ia大时,且误差大于0.5h时,滞环比较器输出负电平,驱动开关器件VT1关断,VT2导通,使实际电流减小。当减小到与给定电流相等时,滞环比较器仍保持负电平输出,VT1保持关断,实际电流继续减小,直到误差大于0.5h时,滞环控制器翻转,输出正电平信号,开关器件VT1导通,VT2关断,使实际电流增大,一直增大到带宽的上限。以上过程重复进行,这样交替工作,实际电流与给定电流的偏差保持在-0.5h-+0.5h 之间,并在给定电流上下作锯齿状变化,达到跟踪电流的目的。 2.2.滞环宽度分析 采用电流滞环跟踪控制的PWM波形,如下图 2-2所示:
永磁同步电动机电流环矢量控制文档
永磁同步电动机的数学模型和矢量控制 1.坐标变换原理 (1)坐标系介绍 三种:三相静止坐标系(abc)、两相静止坐标系(αβ)以及同步旋转坐标系(dq)(2)坐标变换 主要目的是为了将交流电机的物理模型等效地变成直流电机的物理模型,使控制大大简化。不同电机模型等效的原则是:在不同坐标系下产生的磁动势相同。 三相静止坐标系与两相静止坐标系之间转换 为方便起见,取α轴与A轴重合,设三相系统每相绕组的有效匝数为N 3 ,两 相系统每相绕组的有效匝数为N 2 ,各相磁动势均为有效匝数及其瞬时电流的乘积。交流电流的磁动势大小随时间耳边,图中磁动势矢量的长短是任意画的。设磁动势波形是正弦分布,当三相磁动势与两相磁动势相等时,两套绕组瞬时磁动势在α、β上的投影应当相等。 为了便于求反变换,最好将变换阵表示成可逆的方阵。为此,在两相系统上人为 地增加一相零轴磁动势N 2i ,并定义为 将以上三式合在一起,写成矩阵形式,得 式中 是三相坐标系变换到两相坐标系的变换阵。满足功率不变条件时应有
显然,两矩阵的乘积应该为单位阵, 由此求得 这就是满足功率不变约束条件时的参数关系。由此得到 在实际电机中并没有零轴电流,因此实际的电流变换式为 如果三相绕组是星形不带零线接法则 整理得
●两相静止/两相旋转变换 ●由三相静止坐标系到任意两相旋转坐标系上的变换
2.永磁同步电动机的数学模型 当永磁同步电动机的定子通入三相交流电I时,电枢电流在定子绕组电枢电阻 R 上产生电压降IR。由三相交流电流I产生的旋转电枢磁动势Fa,及建立的电S 枢磁场aφ,一方面切割定子绕组并在定子绕组中产生感应反电动势a E,另一方面以电磁力拖动转子以同步转速n 旋转。电枢电流I还会产生仅与定子绕组相交 s 链的定子绕组漏磁通。并在定子绕组中产生感应漏电动势Eσ。此外转子永磁极 产生的磁场0φ以同步转速切割定子绕组,从而产生空载电动势0E。因此永磁同步电动机运行时的电磁关系如下所示:
电流滞环跟踪PWM(CHBPWM)控制技术MATLAB仿真
交流调速系统仿真实验报告——电流滞环跟踪PWM控制技术专业:电气工程及其自动化 班级:11电牵4班 姓名:江流 在班编号:26 指导老师:章勇高 实验日期:2014年10月4日
一、实验名称: 电流滞环跟踪PWM(CHBPWM)控制技术。 二、目的及要求 了解并掌握电流滞环跟踪PWM(CHBPWM)控制电路的工作原理; 2.掌握MATLAB中对Simulink的使用及构建模块; 3.熟悉掌握用MA TLAB绘图的技巧。 三、实验原理 1电流滞环跟踪PWM(CHBPWM)控制电路的原理,如图一所示: 图中,电流控制器是带滞环的比较器,环宽为2h。将给定电流 i*a 与输出电流 ia 进行比较,电流偏差超过时,经滞环控制器HBC控制逆变器 A相上(或下)桥臂的功率器件动作。B、C 二相的原理图均与此相同。 如果, ia < i*a ,且i*a - ia ≥ h,滞环控制器 HBC输出正电平, 驱动上桥臂功率开关器件V1导通,变压变频器输出正电压,使增大。当增长到与相等时,虽然,但HBC仍保持正电平输出,保持导通,使继续增大 直到达到ia = i*a + h , = –h ,使滞环翻转,HBC输出负电 平,关断V1 ,并经延时后驱动V4 但此时未必能够导通,由於电机绕组的电感作用,电流不会反向,而是通过二极管续流,使受到反向钳位而不能导通。此后,逐渐减小,直到时,,到达滞环偏差的下限值,使 HBC 再翻转,又重复使导通。这样,与交替工作,使输出电流给定值之间的偏差保持在范围内,在
正弦波上下作锯齿状变化。从图 2 中可以看到,输出电流是十分接近正弦波的。 图2给出了在给定正弦波电流半个周期内的输出电流波形和相应的相电压波形。可以看出,在半个周期内围绕正弦波作脉动变化,不论在的上升段还是下降段,它都是指数曲线中的一小部分,其变化率与电路参数和电机的反电动势有关。
矢量控制中电流环和速度环PID参数设计指南
1: PI desig n for Curre nt Con trollers PI Design for Current Controllers Choose K, to remove the pole K MTlea ■ yr 卩 -Kp 住如=Kj/K p K^ncs is simply a 铀rf 的 term K ;"冋愀側 specific the in (lecti0n ? InstaSPIN-FOC uses a series configuration for the PI current controller PI Design for Current Controllers Closed loop system transfer function P r 曲 E apgAEY C?J mi rrjMfMimi Medsured QmwiC Find gains C and D to keep REAL poles G (s ) =
PI Design for Current Controllers '"I K, is dependent on the Motor parameters Substitute back in to the transfer function and solve for Kp- ? K, sets the zero of the PI controller and cancels out one of the two poles in the current control system This gain is dependent upon the motor. ?Kp sets the closed loop bandwidth of the cuirrent control system % can be adjusted to make the system more or less stiff. 2:PI desig n for speed con trollers PI Design for Speed Controllers ? f&rm specifies the 驭In af higher frequencies 怕rm 算眩芒胡診$ 血 g 謝廿 罷仏昵/卅世g 血打时点$ ? InstaSPIN-FOC uses a parallel configuration for the PI speed controller. ? Use the series configuration to do analysis. G(s}= ---- n K 严=L Banthddrh jLi* War M'wjiurnX ar iFr-aguificy
电流环速度环位置环
电流环速度环位置环 Revised by BLUE on the afternoon of December 12,2020.
电流环是以电流信号作为反馈信号的控制环节。速度环是以速度信号作为反馈信号的控制环节。位置环是以位置信号作为反馈信号的控制环节。电流环为最内环,在数控机床的伺服系统中它主要起到提高系统的机械特性的作用。其反馈元件一般为电流互感器。速度环在电流环外面,在数控机床的伺服系统中它主要起到控制转速的作用。其反馈元件一般为模拟测速机或编码器。位置环在速度环的外面,在数控机床上就是数控系统的位置控制单元。其反馈元件一般为编码器、光栅尺、感应同步器、旋转变压器等。 数控的驱动由电流环,速度环和位置环组成的,其优化一般由里及外层层优化,但由于电流环的参数在电机和功率模块的型号确定后用厂家的默认参数即可,一般不需要优化,故优化时先优化速度环,再优化位置环即可.速度环的优化,一般涉及到速度环增益和速度环时间常数,速度环时间常数越大和增益越低,速度环越稳定,但精度和动态特性越差,一般来说,速度环时间常数设在10ms左右,而速度环增益调整在使速度环的阶约响应有20-40的超调.位置环的优化涉及到位置环增益和加速度,调整时先可以减少加速度值,再增加位置环增益值,保证系统稳定,然后在适当增加加速度值,使之适应机床的机械特性,注意同一组的插补轴的位置环增益要一致,否则会影响加工精度 电流环和速度环属于伺服控制系统的内部双闭环控制。位置环为数控机床位置控制环,通过数控系统和伺服系统共同控制,使伺服轴运动到数控系统指定的坐标,并在数控系统的屏幕上显示坐标值。 先将电流内环调稳,再调速度外环。“电流在一个小的范围震荡,电机在低速时有一定振颤”——这个震荡误差带是多大小范围的震荡是允许的。 有几句口诀可以供你调试参考: PID常用口诀:参数整定找最佳,从小到大顺序查,先是比例后积分, 最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾, 比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长, 积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢, 微分时间应加长,理想曲线两个波,前高后低4比1。
电流环 速度环 位置环
电流环是以电流信号作为反馈信号的控制环节。 速度环是以速度信号作为反馈信号的控制环节。 位置环是以位置信号作为反馈信号的控制环节。 电流环为最内环,在数控机床的伺服系统中它主要起到提高系统的机械特性的作用。其反馈元件一般为电流互感器。 速度环在电流环外面,在数控机床的伺服系统中它主要起到控制转速的作用。其反馈元件一般为模拟测速机或编码器。 位置环在速度环的外面,在数控机床上就是数控系统的位置控制单元。其反馈元件一般为编码器、光栅尺、感应同步器、旋转变压器等。 数控的驱动由电流环,速度环和位置环组成的,其优化一般由里及外层层优化,但由于电流环的参数在电机和功率模块的型号确定后用厂家的默认参数即可, 一般不需要优化,故优化时先优化速度环,再优化位置环即可. 速度环的优化,一般涉及到速度环增益和速度环时间常数, 速度环时间常数越大和增益越低,速度环越稳定 ,但精度和动态特性越差,一般来说,速度环时间常数设在10ms左右, 而速度环增益调整在使速度环的阶约响应有20-40的超调.
位置环的优化涉及到位置环增益和加速度, 调整时先可以减少加速度值,再增加位置环增益值,保证系统稳定, 然后在适当增加加速度值,使之适应机床的机械特性,注意同一组的插补轴的位置环增益要一致,否则会影响加工精度 电流环和速度环属于伺服控制系统的内部双闭环控制。 位置环为数控机床位置控制环,通过数控系统和伺服系统共同控制,使伺服轴运动到数控系统指定的坐标,并在数控系统的屏幕上显示坐标值。 先将电流内环调稳,再调速度外环。 “电流在一个小的范围震荡,电机在低速时有一定振颤”——这个震荡误差带是多大?小范围的震荡是允许的。 有几句口诀可以供你调试参考: PID常用口诀: 参数整定找最佳,从小到大顺序查,先是比例后积分, 最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾, 比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长, 积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,