双缸控制回路
08级液压传动与气动技术双缸控制回路
(一)行程程序的表示方法
学习要点:1. 行程程序的表示方法。
2. 程序框图框图的简化。
重难点分析:程序框图的简化。
学习思路:在教师的指导下,带领学生认识行程框图的表示方法及程序框图的简化。
学法指导:通过教师的的讲解,启发学生主动思考的能力。
导学——检测装置的工作要求是:气缸A伸出—气缸B伸出—气缸A退回—气缸B退回,如要完成这样的工作循环,该如何设计控制回路呢?
新授:
多缸回路——类似于检测装置这种需要两个(或两个以上)执行()协调工
作的回路。
一、行程程序的表示方法
1.程序框图
()是根据生产工艺流程的要求,确定应使用的执行元件数量及完成任务的动作顺序的要求,可用程序框图来表示。
程序框图是用每一个方框表示()或()。
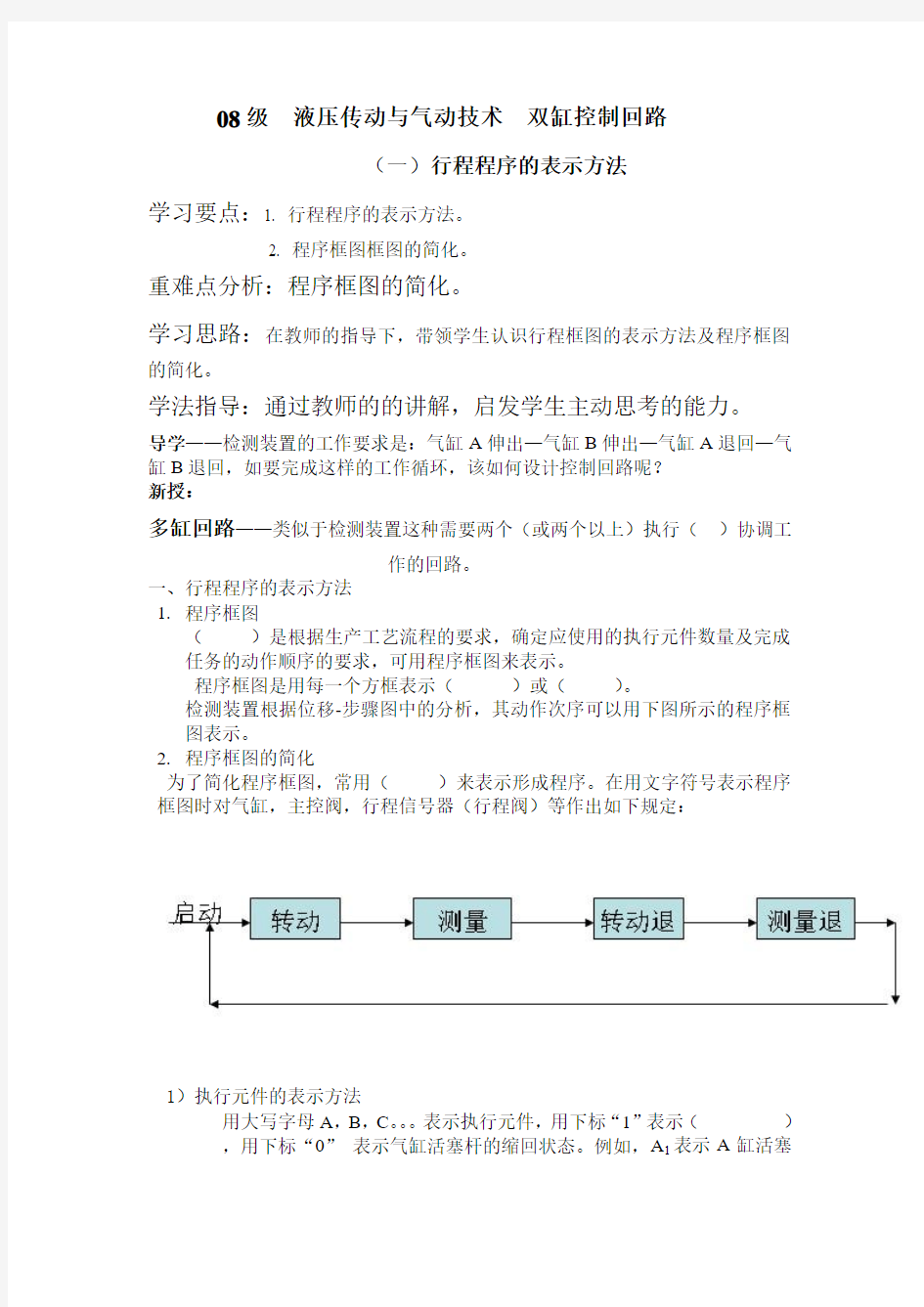
检测装置根据位移-步骤图中的分析,其动作次序可以用下图所示的程序框图表示。
2.程序框图的简化
为了简化程序框图,常用()来表示形成程序。在用文字符号表示程序框图时对气缸,主控阀,行程信号器(行程阀)等作出如下规定:
1)执行元件的表示方法
用大写字母A,B,C。。。表示执行元件,用下标“1”表示()
,用下标“0”表示气缸活塞杆的缩回状态。例如,A1表示A缸活塞
杆伸出,A0表示A缸活塞杆缩回。
2)行程信号器(行程阀)的表示方法
用带有下标的的小写字母a1,a0,b1,b0等烦别表示由A1,A0,B1,B0等动作触发的相对应的行程信号器(行程阀)及其输出的信号。如a1是A缸活塞杆伸出到终端位置所触发的行程阀及其输出的信号。
3)主控阀的表示方法
主控阀用F表示,其下标为其控制的气缸号。如FA是控制A缸的主控阀。主控阀的输出信号与气缸的动作是一致的,如主控阀FA的输出信号A1有信号,即活塞杆伸出。
气缸与主控阀,行程信号器(行程阀)之间的关系及有关代号见课本146页图11-4所示。
4)行程控制阀的简化表示方法
根据上述的规定,检测装置的程序框图可简化成课本146页图11-5所示的表示方法。
同步练习:授课完毕,学生自行完成上述各填空
学生自我测评:完成课后练习。
小结:初步认识和了解了检测装置回路设计中的行程程序的表示方法和简化方法。
6-4 设计与搭建双缸辊轧机液压控制回路
项目二液压系统基本回路 【课题名称】任务4 设计与搭建双缸辊轧机液压控制回路 【课时安排】3学时 【教学目标】 1.了解流量控制阀的基本知识。 2.认识调速回路和同步回路。 3.掌握双缸辊轧机液压控制回路的设计与调试方法。 【教学重点】 1.调速回路和同步回路。 2.掌握双缸辊轧机液压控制回路的设计与调试方法。 【教学难点】调速阀的工作原理。 【关键点】速回路和同步回路应用。 【教学方法】理实一体、讨论法、多媒体展示 【教具资源】实训室、多媒体教学设施 【教学过程】 一、导入新课 教师通过展示双缸辊轧机工作过程,引出本任务学习内容。 二、讲授新课 教学环节1 任务布置及分析 教师活动:通过分析任务要求,引导学生确定本次任务使用的元器件及回路要求。 学生活动:分组讨论确定完成本次任务的回路要求及元器件。 教学环节2 知识链接 教师活动1:通过分析任务要求,利用实物展示及动画视频资料,介绍本任务所需使用的速度控制元件调速阀的结构、工作原理。 学生活动1:通过听讲了解调速阀的结构、工作原理。 知识点1:调速阀的结构、工作原理。 液压传动系统中,执行元件运动速度的大小,由输入执行元件的油液流量的大小来确定。流量控制阀就是依靠改变阀口通流截面面积的大小或通道长短来控制流量的。常用的流量控制阀主要有节流阀和调速阀两种。本次任务采用的流量控制阀是调速阀。 1.调速阀 液压系统中使用的节流阀的工作原理和气动节流阀相似,具体内容参见气动节流阀相关知识。节流阀结构简单但是流量不能稳定控制,在对速度有较高要求的场合采用调速阀。 调速阀如图6-4-2所示,它的基本结构包括节流阀1、定差减压阀2、节流阀阀芯3、减压阀阀芯4和泄露油口5。它实际就是减压阀与节流阀串接而成的。当压力为P1的油液经减压阀后,压力降为P2,并分成两个分路,一路经节流口流向调速阀的出口,另一路作用在减压阀阀芯的右端面。压力P2的油液经节流阀口降低至P3,将P3压力油液引到减压
如何设计多支路同步控制回路
如何设计多支路液压同步控制回路? 在多支路驱动器的应用设计中,处理两个或多个驱动器等速同步驱动时出现问题较多。 为简化问题,用两个油缸的举升平台为例,下列公式和计算方法适应与多数驱动器,马达或油缸。 如果载荷时对两个油缸不对称,油缸速度V1和V2不同,Q1和Q2流量不同,则油缸(1)和油缸(2)举升行程也不相同。 看看下面的例子中油缸伸出速度不同时对平台的水平状态的影响。 图1:两个油缸的举升平台图2:平台的水平倾斜 根据公式计算,速度变化时,平台倾斜角度随之变化,请见上表。可以根据工况来选择不同的设计方案。下面介绍五种常用的设计方案。
方案1:压力补偿分流阀 压力补偿分流阀将一路供油分为两路等量供油,不受输入输出压力的影响。见图3. 当平台负载变化时,滑阀(4)在分流阀(3)中自动滑移,以补偿P1与P2压力的压差。压力通过滑阀内部的钻孔作用于相反一侧滑阀的端面,若P1压力较高,则相反一端的开口减少,其Q2开口流量相应减少,反之皆然。进口压力=高压出口的压力+开口的压降。集流阀的同步精度约为5-10%。 方案2:压力补偿流量阀 压力补偿流量阀可以不受压力波动的影响,通过独立对个阀流量进行调整,满足同步速度的要求。该方案适用等量或不等量同步控制,对两路阀手动微动调整可以满足不同速度的要求。同步精度约为5%。 方案3:同型号液压泵 采用两个同样型号的液压泵也可实现同步控制。但是负载压力波动会影响液压泵的内泄。两泵方案实现调速较困难。控制的精度约为5%,
方案4:双杆等速油缸串联回路 采用双杆等速油缸串联回路的主要优点是容积效 率较高。由于油缸1排出的流量与进入油缸2的 流量相等,所以两油缸的速度相等。该方案等速 同步控制精度约为1%。 缺点是油缸1的压力为负载的2倍,另外双杆油 缸的安装空间较大。 方案5:同步液压齿轮分流器 旋转式分流器是将一路供油分为两路或多路等量或不等量供油,供油不受输入输出压力的影响。 双片分流器是由两个相同排量的马达组成,采用公共轴连接,因此两个马达的速度相同,流量也相同。工作原理同于马达,由于驱动轴几乎不损失动力,所以各马达片间压降极小。在结构可以根据流量速度采用不同数量和不同型号的马达组合,选配灵活,适应范围较广。由于马达内泄较低,同步控制精度约为1%。 该方案在同步控制中精度高,成本低,应用广泛。
双缸控制回路
08级液压传动与气动技术双缸控制回路 (一)行程程序的表示方法 学习要点:1. 行程程序的表示方法。 2. 程序框图框图的简化。 重难点分析:程序框图的简化。 学习思路:在教师的指导下,带领学生认识行程框图的表示方法及程序框图的简化。 学法指导:通过教师的的讲解,启发学生主动思考的能力。 导学——检测装置的工作要求是:气缸A伸出—气缸B伸出—气缸A退回—气缸B退回,如要完成这样的工作循环,该如何设计控制回路呢? 新授: 多缸回路——类似于检测装置这种需要两个(或两个以上)执行()协调工 作的回路。 一、行程程序的表示方法 1.程序框图 ()是根据生产工艺流程的要求,确定应使用的执行元件数量及完成任务的动作顺序的要求,可用程序框图来表示。 程序框图是用每一个方框表示()或()。 检测装置根据位移-步骤图中的分析,其动作次序可以用下图所示的程序框图表示。 2.程序框图的简化 为了简化程序框图,常用()来表示形成程序。在用文字符号表示程序框图时对气缸,主控阀,行程信号器(行程阀)等作出如下规定: 1)执行元件的表示方法 用大写字母A,B,C。。。表示执行元件,用下标“1”表示() ,用下标“0”表示气缸活塞杆的缩回状态。例如,A1表示A缸活塞
杆伸出,A0表示A缸活塞杆缩回。 2)行程信号器(行程阀)的表示方法 用带有下标的的小写字母a1,a0,b1,b0等烦别表示由A1,A0,B1,B0等动作触发的相对应的行程信号器(行程阀)及其输出的信号。如a1是A缸活塞杆伸出到终端位置所触发的行程阀及其输出的信号。 3)主控阀的表示方法 主控阀用F表示,其下标为其控制的气缸号。如FA是控制A缸的主控阀。主控阀的输出信号与气缸的动作是一致的,如主控阀FA的输出信号A1有信号,即活塞杆伸出。 气缸与主控阀,行程信号器(行程阀)之间的关系及有关代号见课本146页图11-4所示。 4)行程控制阀的简化表示方法 根据上述的规定,检测装置的程序框图可简化成课本146页图11-5所示的表示方法。 同步练习:授课完毕,学生自行完成上述各填空 学生自我测评:完成课后练习。 小结:初步认识和了解了检测装置回路设计中的行程程序的表示方法和简化方法。
实验三双缸顺序动作回路实验
实验三双缸顺序动作回路实验 一、实验目的 1.学会使用换向阀、行程开关等液压元件来控制多个液压缸的顺序动作,加深对所学知识的理解与掌握; 2.培养使用各种液压元件进行系统回路的连接、安装和调试的操作能力; 3.进一步理解采用行程开关控制的顺序动作回路的工作原理及应用 二、实验内容 1.通过亲自装拆,了解液压元件及管路的正确连接与安装的方法。 2.了解顺序动作回路组成和性能。 三、实验基本原理 顺序动作回路的功用是使液压系统中的多个执行元件严格地按规定的顺序动作。按控制方式分为压力控制、行程控制和时间控制三类。 行程控制顺序动作回路,液压原理图见图。工作过程见电磁铁动作表,自动循环。
多缸顺序动作回路的工作原理为: 1.启动油泵,CT1通电,左换向阀处于左位,液压缸A中活塞向右运动,实现动作1; 2.缸A前进,活塞杆触头压下行程开关L2后,CT2通电,右换向阀处于左位,液压缸B中活塞向右运动,实现动作2; 3.缸B前进,活塞杆触头压下行程开关L3后,CT1断电,左换向阀恢复右位,液压缸A中活塞向左运动,实现动作3; 4.缸A退回,活塞杆触头压下行程开关L4后,CT2断电,右换向阀恢复右位,液压缸B中活塞向左运动,实现动作4; 5.缸B退回,活塞杆触头压下行程开关L1后,CT1通电,左换向阀处于左位,液压缸A中活塞向右运动,实现动作1; 6.二位二通电磁换向阀CT3通电,系统缸荷,液压缸停止工作。 采用行程开关控制多缸顺序动作回路的工作原理见图。工作过程见电磁铁动作表。 四、实验方法与步骤 1.实验方法: 本实验采用透明可视的液压元件和快速插装式的管路在液压实验台上完成。电气线路与控制按钮均在实验台,操作安全、控制方便。根据已学的液压回路的
气动控制技术速度控制回路
气动控制技术—速度控制回路 教案首页
课题:速度控制回路 课前准备: 1、气动实训一体化装置26台; 2、计算机26套,多媒体投影仪1台,云台摄像头系统1套; 3、常用电工工具、六角扳手各26套。 授课内容: 时间 教学内容和过程备注 2分钟 考勤、填写教学日志,调节课堂气氛,调动学生主动参与课堂, 创造和谐活泼课堂,做好接受新知识的准备工作。让学生把下课的心放到课堂上来,用故事、激励、表扬等方法实现。 5分钟 教师提问:1、我们前面所学的气动控制基本回路有哪几种? 学生回答:方向控制回路、压力控制回路 教师提问:2、常见控制阀的图形符号有哪些? 学生上黑板画或由教师画出符号,学生回答符号代表的意思和所 起的作用复习前面所学的控制回路,巩固所学的知识。 复习几种常见控制阀符号和作用,为新课做铺垫。 6分钟 让学生观看自动化生产线工件加工过程的视频,总结出工作台的动作过程。假如你们是工程技术人员,现在要你设计一台气动传动的机床,要求这台机床工作时自动刀架先带刀具快速接近工件,后以慢速工进,对工件进行加工,加工完快速退回原处。那么你启发学生,引导学生思考,让学生各抒己见,不一定要用课本的知识,只要有自己的见解或是创造性思维的就给予表扬,然后引入本课内容举例、演示、情境教学,让学生有主人翁的感觉。设疑,引起学生的兴趣。 一、组织教学 二、复习回顾 三、任务引入
们如何设计才能满足这种要求呢? 12分 钟 一、快进回路 二、工进回路 三、快退回路用逐步演示动画的方式让学生清清楚楚地看到速度控制回路的工作过程,对其原理及工作过程进行详细的分析。答疑,前面在导入新课时所设的问题这里给了明确的答复。 四、任务分析
气动控制设计电气控回路样本
標準 線路圖布置 與在 "基本氣動訓練教程" 中討論的相同, 電氣回路不能畫成 "接線圖" 式。 一個回路由若干個子回路, 或稱 "電流通路" 所組成, 每一個子回路為一個基本回路。它是由一個或更多的開關元件及一負載元件組成。兩條水平線則代表電源供應線。 各個電流通路以數字標出。繼電器的觸點並非置於其操作線圈旁, 而是安放於執行其功能的地方。觸點的編號列在繼電器線圈下方, 這樣一來便易於搜尋其於梯形線路圖上之所在位置。對檢查有關之線路設計提供一定指引。
美國於 1947 年引入的 JIC 標準正好提供有關近接開關於 "止定" 狀態時觸點的操作位置, 確閱讀提供了靜止位置動作的限位開關的單獨標志, 但歐洲標準 (即 BS3939) 則並未提及。本書中我們嚴格區分動作與不動作的開關。 注意圖4.1 回路中通路 4 的a1觸點與通路 3 中的 a0 觸點之間的不同操作位置。很清楚當循環繼電器 CR 閉合時 A+ 將加上電壓。開關 b0 是處於閉合狀態, 盡管它是常開型觸點。另一方面在通路 3 的 b0 觸點和通路 2 中的 "OFF" 有著根本的不同, 雖然兩者在機器靜止時均處于關閉, 但 "OFF" 是 "常閉" 型開關, 而b0 則是一個 "常開" 型近接開關, 動作程序一般由左到右。
如上圖所示, 線路 "2" 上 OFF 開關當被按動時, 其供電通路便馬上斷開, 而位處於線路 "3" 上的 "b0" 近接開關當其復位時便會馬上切斷供應外電磁閥的電線通路。 滾輪操作開關 常開型(N.O.) 常開型(N.O.), 處於閉合狀態 常閉型(N.C.)常閉型(N.C.), 處於閉合狀態 氣缸磁性開關 常開型(N.O.)常開(N.O.), 處於閉合狀態 表4.2 限位開關的主要符號 電-氣動回路
单回路控制系统详解
一、单回路控制系统 1. 画出图示系统的方框图: 2. 一个简单控制系统总的开环增益(放大系数)应是正值还是负值?仪表行业定义的控制器增益与控制系统中定义的控制器的增益在符号上有什么关系?为什么? 3. 试确定习题1中控制器的正反作用。若加热变成冷却,且控制阀由气开变为气关,控制器的正反作用是否需要 4. 什么是对象的控制通道和扰动通道?若它们可用一阶加时滞环节来近似,试述K P 、K f 、τp 、τf 对控制系统质量的影响。 5. 已知广义对象的传递函数为1) S (T e K P S τP P +-,若P P T τ的比值一定时,T P 大小对控制质量有什么影响?为什么? 6. 一个简单控制系统的变送器量程变化后,对控制质量有什么影响?举例说明。 7. 试述控制阀流量特性的选择原则,并举例加以说明。 8. 对图示控制系统采用线性控制阀。当负荷G 增加后,系统的响应趋于 非周期函数,而G 减少时,系统响应震 9. 一个简单控制系统中,控制阀口 径变化后,对系统质量有何影响? 10. 已知蒸汽加热器如图所示,该系 统热量平衡式为:G 1C 1(θ0-θi )=G 2λ(λ 为蒸汽的冷凝潜热)。 (1)主要扰动为θi 时,选择控制阀的流量特性。 (2)主要扰动为G 1时,量特性。 (3特性。 11.
作用后,对系统质量有什么影响?为了保持同样的衰减比,比例度δ要增加,为什么? 12. 试写出正微分和反微分单元的传递函数和微分方程;画出它们的阶跃响应,并简述它们的应用场合。 13. 什么叫积分饱和?产生积分饱和的条件是什么? 14. 采用响应曲线法整定控制器参数,选用单比例控制时,δ=K P τP /T P ×100%,即δ∝K P ,δ∝τP /T P ,为什么?而选择比例积分控制时,δ=1.44K P τP /T P ×100%,即比例度增加,为什么? 15. 采用临界比例度法整定控制器参数,在单比例控制时,δ=2δK (临界比例度),为什么? 16. 在一个简单控制系统中,若对象的传递函数为 ) 1T )(1S 1)(T S (T K W P V P +-+S ,进行控制器参数整定时,应注意什么? 17. 已知广义对象的传递函数为1) S (T e K P S τP P +-,采用比例控制,当系统达到稳定边缘时,K C =K CK ,临界周期为T K 。问: (1)T K /τP 在什么数值范围内(即上、下界),τP /T P 增加时,这一比值是上升还是下降? (2)K CK 在什么数值范围内(即上、下界),τP /T P 增加时,K CK 是上升还是下降? 18. 一个过程控制系统的对象有较大的容量滞后,而另一系统由于测量点位置造成纯滞后。若对两个系统均采用微分控制,试问效果如何? 19. 某一温度控制系统,采用4:1衰减曲线法进行整定,测得系统的衰减比例度 δs=25%,衰减振荡周期Ts=10min ,当控制器采用P 和PI 控制作用时,试求其整定参数值。 20. 有一个过程控制系统(采用DDZ-Ⅲ型仪表),当广义对象的输入电流(即控制器的输出电流)为14mA 时,其被控温度的测量值为70℃。当输入电流突然从14mA 增至15mA ,并待被控温度达到稳定时,其测量值为74℃。设测温仪表的量程为50-100℃。同时由实验测得广义对象的时间常数T P =3min ,滞后时间τP =1.2min ,试求衰减比为4:1时PI 控制器的整定参数值。 21. 某一个过程控制系统,利用临界比例度法进行控制器的参数整定。当比例度为12%时,系统出现等幅振荡,其临界振荡周期为180s ,试求采用PID 控制器时的整定参数值。 22. 已知控制系统方块图如下: 求:(1)X 作单位跃阶变化时,随动控制系统的余差。
复杂回路的控制.
一、 界区的天然气控制: 143- 174-D 控制原理: 压力变送器PT1041输入一个信号作为控制器PIC1041的测量值PV ,PIC1041给定一个SV 值,当PV 值<SV 值,PIC1041输出一个信号给PY1041,经PY1041转换后去控制阀门PV1041的动作,要求PV1041打开,直至PV 值=SV 值,反之亦然。 设置目的: 稳定进入界区的天然气压力,防止系统出现压力波动。 二、108 -DA 的返H 控制: 103-101BCF 控制原理: 从103-J 一段出口抽出的合成气经FV1022,在101-BCF 预热后为108-DA 加氢脱硫提供所需的H2气,流量变送器FT1022输入一个信号作为流量控制器 FIC -1022的测量值,FIC1022给定一个SV 值,当FIC1022的PV 值<SV 值,FIC1022输出一个信号给FY1022A ,经FY1022A 转换后去控制FV1022的动作,要求FV1022打开,直至FIC1022的PV 值=SV 值,反之关闭FV1022阀。 设置目的: 提供稳定的合成气,去除天然气中的有机硫,保证后系统催化剂的安全运行,以免形成硫中毒。 三、 102-J 的防喘振控制 -D 102-101BCF 控制原理: 流量变送器FT1015输入一个信号作为流量控制器FIC1015的测量值PV ,FIC1015给定一个SV 值,当PV 值<SV 值,FIC1015输出一个信号给FY1015,经FY1015转换后去控制FV1015的动作,要求FV1015打开,
直至FIC1015的PV 值=SV 值,反之关闭FV1015。 设置目的: 防止压缩机喘振。 四、108-DA 的入口温度控制: 102- 101BCF 108- 控制原理: 温度变送器TT1305输入一个信号作为温度控制器TIC1305的测量值PV ,TIC1305给定一个SV 值,当PV 值<SV 值,因TIC1305为反作用控制器,TIC1305输出一个信号给TY1305,经TY1305转换后去控制TV1305的动作,要求TV1305关闭,直至TIC1305的PV 值=SV 值,反之打开TV1305。 设置目的: 控制108-DA 的入口温度,保护108-DA 的催化剂,及保证108-DA 催化剂床层反应最好。