总方差方法在光纤陀螺随机误差分析中的应用
电V ol.39, No.1 第39卷第1期 光工程
2012年1月Opto-Electronic Engineering Jan, 2012 文章编号:1003-501X(2012)01-0062-06
总方差方法在光纤陀螺随机误差分析中的应用
石祥
国1,陈坚1,叶军1,王林2
( 1. 第二炮兵工程学院,西安 710025;
2. 第二炮兵驻孝感地区军事代表室,湖北孝感 432100 )
摘要:总方差方法被引入到光纤陀螺随机误差特性分析当中,有效克服了传统Allan方差法在长相关时间上计算易出现“崩溃”的问题。但用它直接分析光纤陀螺随机噪声存在算法偏差,不能真实反映角度随机游走噪声、量化噪声和指数相关噪声方差值,因此在算法上对总方差提出改进,使其适用于光纤陀螺噪声分析。对模拟的各项随机噪声进行仿真计算,验证改进后总方差方法可有效辨识噪声类型和水平。对光纤陀螺实测数据方差分析表明改进的总方差方法在平均因子较大的情况下可提高估计置信度,方差值稳定性好,比Allan方差法能更精确地分析出噪声项系数。
关键词:光纤陀螺;Allan方差;总方差;功率谱密度
中图分类号:TN253 文献标志码:A doi:10.3969/j.issn.1003-501X.2012.01.011 Applications of Total Variance Method in Random Error
Analysis of the Fiber Optic Gyro Signal
SHI Guo-xiang1,CHEN Jian1,YE Jun1,WANG Lin2
( 1. The Second Artillery Engineering College, Xi’an 710025, China;
2. The Second Artillery Representative Room of Xiaogan District, Xiaogan 432100, Hubei Province, China )
Abstract: Total variance is used to analyze the random noise of Fiber Optic Gyroscope (FOG), which efficiently solves the problem that the Allan variance calculation is easy to be unstable at long-term τ values. But there is algorithm error with total variance when analyzing the random noise of FOG directly, which cannot really reflect the variances of rate random walk noise, quantization noise and exponentially correlated noise. So an improved method based on total variance is presented to suit random noise analysis of FOG. The estimation performance with the simulated random noise shows that the improved total variance can efficiently identify the noise types and levels. According to the analysis of measured FOG signal, it can improve the confidence in the case of great mean index, the values of variance have a good stability, and it is better and more exact than Allan Variance in identifying noise coefficient.
Key words: fiber optic gyroscope; Allan variance; total variance; power spectrum density
0 引 言
光纤陀螺(FOG)作为新一代的全固态惯性器件,已被广泛地应用于捷联式惯性导航系统。但由于其自身的结构特点和易受环境影响,输出信号中含有大量随机噪声,这些噪声往往呈现非平稳性和非正态分布特性,它们是影响光纤陀螺精度的一个关键因素。对光纤陀螺输出信号中的噪声进行有效地估计和辨识有助于进一步分析随机误差产生的原因,采取相应的补偿方法提高光纤陀螺性能。
Allan方差分析法作为IEEE认可的光纤陀螺误差项分析标准方法,能非常容易地对各种误差源及整个噪声统计特性进行细致的表征和辨识。“差分”是Allan方差分析的核心思想,即信号时域数据的二次差分收稿日期:2011-07-17; 收到修改稿日期:2011-10-19
作者简介:石国祥(1984-),男(汉族),陕西西安人。硕士研究生,研究方向:导航、制导与控制。E-mail:stone.712@https://www.360docs.net/doc/7810828914.html,。
第39卷第1期 石国祥 等:总方差方法在光纤陀螺随机误差分析中的应用
63
与频域数据的一次差分存在固定函数关系[1]。但在长相关时间的情况下,平均因子增大导致数据趋于对称,使得Allan 方差可能出现“崩溃”情况[2]。并且Allan 方差的估计可信度依赖于独立的数组,对于给定的随机序列,相关时间越长,划分的数组越少,Allan 方差的估计误差越大,置信度越低。
总方差分析法是一种较新的频域稳定度分析工具,它和Allan 方差分析法一样都基于“差分”的思想,通过映射的方法对陀螺信号进行延伸,提高原始数据自由度,克服了在平均因子大的情况下方差值可能出现“崩溃”的不足,提高了方差估计的置信度。总方差分析法最初是在原子钟频率漂移特性分析领域使用的,文献[3]将其引入到光纤陀螺随机误差特性分析的研究当中。本文在此基础上给出了使用总方差方法分析光纤陀螺静态漂移数据的具体步骤,并对总方差计算方法进行适当改进,克服其直接用于光纤陀螺输出数据分析时,角度随机游走噪声、量化噪声和指数相关噪声总方差值明显大于Allan 方差值的不足,使Allan 方差与陀螺信号功率谱密度之间的关系同样适用于总方差,便于通过总方差曲线拟合精确得到光纤陀螺信号中各误差源系数。
1 光纤陀螺随机误差的Allan 方差分析法
Allan 方差的计算方法为:首先测得采样时间间隔为T s 的N 个光纤陀螺输出角速度数据i ? ),,2,1(N i L =。然后对这N 个连续的初始样本数据进行二次采样,采样间隔为s T m ?=τ ),2/1(Z m N m ∈≤≤,即将N 个数据分成K 组(K =N /m ),每组m 个数据。求出每组平均角速度值:
∑=+??=
m
i i m k k ?m m ?1
)1(1)( (1) Allan 方差定义为
∑?=+??=
1
1
212A )]()([)
1(21)(K k k k m ?m ?K τσ (2) Allan 方差)(2
A
τσ与随机过程)(t ?的功率谱密度)(f S Ω之间的关系为 f f f f S ∫∞
+=0
2
4?2
A
d )π()π(sin )(4)(τττσ (3)
利用这种关系就可以根据光纤陀螺时域输出数据分析出各种误差源的类型和误差系数值。
Allan 方差分析是基于有限长度的数据,其估计的精度依赖于独立数组个数K ,估计值的可信度随K 的增加而提高。K -1即代表方差估计的实际自由度,定义Allan 方差估计的误差为
%100)
1(21
A ×??=K δ (4)
相关时间τ越短,独立数组个数K 越多,估计误差越小[4]。
2 光纤陀螺随机误差的总方差分析法
2.1 总方差基本原理
总方差法作为一种较新的频率稳定度分析工具,它在对陀螺信号做方差计算前首先要将原始数据进行镜像映射,以增加数据自由度。其具体方法如下:
以T s 为采样间隔测得一组信号数据i ?),,2,1(N i L =,N 为测量数据总长度。将序列}{i ?通过镜像映射延伸成一个新的序列}{?i ?,映射算法为
??????++==??====?+??
??)12,,2,1(),,2,1()
0,,3,2(121N N N i N i N N i ??????i N i
i
i i i L L L (5) 映射延伸产生的虚拟序列}{?i ?长度接近于原始数据的三陪。总方差计算公式为
∑=??
????=N n m n n ??N 2
2
2tol )()1(21)(τσ (6)
光电工程 2012年1月
64 式中:s T m ?=τ,m 为平均因子。经过数据延伸后m 最大可取到N -1,而传统的Allan 方差法中m 最大为
N /2。
用总方差方法分析陀螺数据时,同样存在估计值的精度问题,套用Allan 方差估计的误差计算公式,总方差估计的误差为
%100)
(21
tol ×?=
τδEDF (7)
其中:EDF (τ)表示相关时间为τ时总方差的等效自由度。通过对各种调频噪声进行确切的计算和经验拟合后,得出如下式所示的总方差等效自由度计算公式[5]:
2
0()(T
c
T
b EDF ≤
≈τττ (8)
式中:T 为数据采样的总时间,T /τ即相当于Allan 方差分析中的独立数组个数K 。对白噪声和随机游走噪
声而言,(b ,c )相应的值分别为(1.5,0)和(0.927,0.358)。由以上数据可以得出在K 与T /τ相同的情况下,总方差估计的误差要小于Allan 方差估计的误差。
2.2 总方差方法用于陀螺信号分析所存在的问题及原因
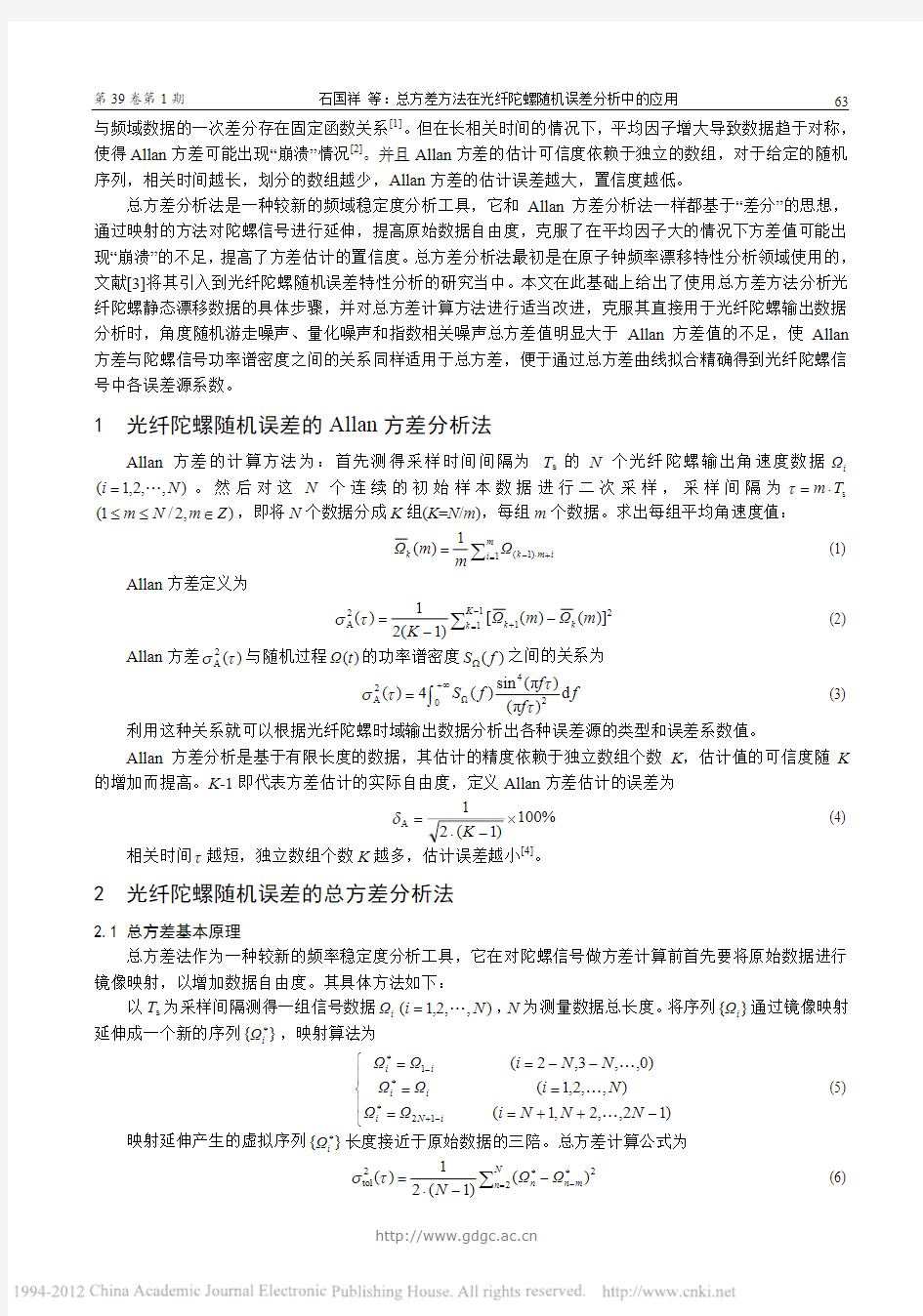
总方差的定义是在研究原子钟频率稳定性时提出的,对于原子钟频率数据中存在的幂率噪声,总方差方法能够辨识其类型和噪声水平。而光纤陀螺输出信号中的各项随机噪声并不完全服从幂率噪声特性,所以直接使用式(6)计算总方差值存在方法偏差。通过大量的仿真验证和光纤陀螺实测数据分析,发现总方差方法在估计角度随机游走噪声、量化噪声和指数相关噪声时明显偏大,不能真实反映噪声水平。这里仅以量化噪声为例,比较仿真结果。用均值为零,方差为LSB 2/2的高斯白噪声模拟光纤陀螺量化噪声,LSB 表示角度量化的最低有效位[6]。分别用总方差方法和Allan 方差法进行分析,图1中Allan 标准差曲线为蓝色,总标准差曲线为红色。很明显,随着相关时间τ的增大,总方差方法估计值与Allan 方差估计值之差越来越大。由于量化噪声是通过其一阶差分的形式影响光纤陀螺输出角速率数据的,不具备幂率噪声特性,所以直接使用总方差方法分析难以得到真实的量化
噪声幅值。
光纤陀螺随机误差按照来源可分为5种主要噪声项:角度随机游走噪声、偏置不稳定性噪声、速率随机游走噪声、速率斜坡噪声和量化噪声。它们的功率谱密度(PSD)表达式分别与频率的γ次方成 反比,这类随机过程统称为γf /1类分形噪声[7]。使 用总方差方法处理这5类噪声,需要对总方差计算式进行适当地改进。具体分析Allan 方差计算公式可发现,式(2)是对相邻两组角速度数据的平均值差分后平方,计算整体均值,每组为m 个数据。将式
(1)代入式(2),Allan 方差公式可变为
∑∑?==+?+???=
1121)1(2A ])([)1(21
)(K k m
i i m k i km ??m K τσ (9)
而总方差计算式(6)是将相隔m 的两个角速度数据差分后平方,然后整体求平均。对比式(6)和式(9),发现总方差计算时遗漏了各分组数据差分后平方计算中的乘积项;而且在m K N ??≈?)1(1时,Allan 方差比总方差多除一个m ,这也是为什么随着相关时间τ的增大,量化噪声的总方差估计值明显偏大的原因。 2.3 总方差方法的改进
针对总方差方法存在的以上问题,本文提出改进后的总方差计算公式:
21)1(])([1)(∑=?
+??+?=m i i m k i km k ??m
m D (10)
图1 量化噪声各方差分析双对数曲线
Fig.1 Log-log plot of quantization noise variance analysis
10-4 10-2 10-8
10-6 10-1 S t a n d a r d d e v i a t i o n σ(τ) /(°/h )
3
10 10 10
10
10
τ/s
第39卷第1期 石国祥 等:总方差方法在光纤陀螺随机误差分析中的应用
65
∑+?=?+=
K
K k k m D m N 2
2Atol )()22(21)(τσ (11) 其中:m N K /=,m 表示平均因子。对于11?≤≤N m ,τ的最大取值为s )1(T N ??,但τ过大会降低方差计算自由度,在实际应用中,一般规定2/s NT ≤τ。改进后的总方差计算方法在保持原总方差算法自由度的同时,既克服了在τ较大时Allan 方差计算易出现“崩溃”的缺点,又能真实反映光纤陀螺各项随机噪声水平。 2.4 光纤陀螺随机误差的总方差分析
对于光纤陀螺的5项基本随机误差,经过改进后的总方差和Allan 方差一样,与随机过程)(t ?的功率谱密度)(f S Ω之间存在式(3)所示的关系。
1) 角度随机游走(Angle random walk),该误差的主要来源是光子的自发辐射和探测器散粒噪声。这类噪声具有角速率白噪声功率谱:
2)(ω=Ωf S (12)
其中:ω为角度随机游走系数,与总方差的关系为
τωτσω/)(22= (13)
2) 零偏不稳定性(Bias instability),这一噪声主要由角速度数据中的低频零偏波动引起,其速率功率谱密度为:
??
???>≤?
=Ω00201
π2)(f f f f f B f S (14)
其中:B 为零偏不稳定系数,0f 为截止频率。B 与总方差的关系为
2ln π
2)(22
??≈B B τσ (15)
3) 速率随机游走(Rate random walk),该误差项是宽带角加速度功率谱密度积分的结果,其来源不太确定。这一噪声的速率功率谱密度为
22
1
π2)(f
f S ???????=Ωυ (16)
其中:υ为速率随机游走系数,与总方差的关系为
3/)(22τυτσυ= (17)
4) 速率斜坡(Rate ramp),该噪声本质上是一种确定性误差,其表现为陀螺的真实输入,相应的速率功率谱密度为
32)π2/()(f R f S =Ω (18)
其中:R 为速率斜坡系数,与总方差的关系为
2/)(222ττσR R = (19)
5) 量化噪声(Quantization noise),该噪声是由传感器输出的量化性质造成的,其速率功率谱密度为
02
022/1)π2()(ττ<≈Ωf Q f f S (20)
其中:Q 为量化噪声系数,与总方差的关系为
222/3)(ττσQ Q = (21)
光纤陀螺输出数据中可能存在各种成分的随机噪声,若各噪声源统计独立,则改进后的总方差可表示为一种或几种误差源的方差和。如下式所示:
)()()()()(2
22222Atol τστστστστσσωυQ B R
++++= (22) 即: 22222222
Atol
32ln π
232ττωτυτσ
Q B R ++??++= (23) 式(23)可简写为 ∑?=?=2
22
Atol )(n n n C ττσ (24)
式中:)(Atol τσ的单位是/h °,τ的单位是s 。对式(24)进行最小二乘拟合得R 、υ、B 、ω和Q 估计值分别为
光电工程 2012年1月
66 );/h (2ln2
π);/h (260;)/h (260030
3/2122°=
°=°=C B C K C R )μrad (36003180π10;)h /(602-61
-???
?
??
??××?=°=C Q C N (25) 3 仿真结果与分析
模拟产生光纤陀螺各项随机噪声,分别进行Allan 方差分析、总方差分析和改进的总方差分析,比较
各方法的估计性能。以偏置不稳定性噪声为例,该噪声为f /1型噪声,可以用小波变换的方法对其进行模拟[7-8]。图2为偏置不稳定性噪声采用各种方差方法分析的双对数曲线图。
图2中Allan 标准差和总标准差曲线颜色定义同图1,改进后总标准差曲线为棕色。随着相关时间τ的增大,Allan 方差计算值出现明显的“崩溃”现象,总标准差值曲线仍然保持基本水平状态,而改进的总标准差值介于两者之间,且能有效跟进Allan 标准差,同时避免数据自由度降低引起的“崩溃”。总体而言,三种方差分析方法都准确地反映出偏置不稳定性噪声在方差分析双对数曲线中表现为水平直线的特性。对于速率随机游走噪声和速率斜坡噪声,三种方法同样能真实反映噪声水平,这里不再给出图示说明。图3是量化噪声的标准差双对数曲线图。
由图可知,对于量化噪声,改进后总标准差与Allan 标准差能较好拟合,克服了之前总方差估计随相关时间τ增大偏差变大的问题。改进后的总方差方法对角度随机游走噪声和指数相关噪声的分析结果也表明这一改进的有效性,在此限于篇幅不再详述。
通过对光纤陀螺输出信号中包含的几项基本噪声分析发现,改进的总方差方法继承了原总方差方法的优点,在相关时间τ
增大时,估计值仍然保持较小的振荡,没有出现“崩溃”现象。当相关时间τ较小时(即
平均因子m 较小时),Allan 方差和改进后总方差几乎完全相等。但在大的平均因子情况下,Allan 方差估计的数据自由度减小,估计值波动增大,尤其是在接近测量数据总持续时间一半(2/T =τ)时,Allan 方差估计值变化非常剧烈。从对应的自由度来看,当2/T =τ时,Allan 方差仅仅有1个自由度,而总方差和改进的总方差有3个自由度,因此Allan 方差往往会因为数据趋于对称的缘故处于“崩溃”的境地。
为了在总体上检验改进后总方差分析方法的性能,以一段实测光纤陀螺静态漂移数据为对象进行分析。实测数据是某干涉型光纤陀螺在静止转台上输入轴水平东向测得的,采频率20 Hz ,测试温度25℃。分别用Allan 方差分析法和改进的总方差分析法计算并画出ττσ?)(双对数曲线图4(原总方差分析法对部分噪声项存在估计方差偏大问题,故不讨论其对陀螺实测信号的分析)。
用改进的总方差分析法处理陀螺实测信号,得到的标准差双对数曲线振荡要小于Allan 标准差双对数曲线,陀螺各项噪声在双对数曲线中的对应斜率特征也更加明显,这有助于通过最小二乘拟合精确地辨识各噪声项误差系数。如表1所示。
图3 量化噪声各方差分析曲线对比图
Fig.3 Comparison log-log plot of quantization
noise variance analysis
Allan standard deviation
Total standard deviation Improved total standard deviation
103
10-2 10-1 100 101 102
τ/s
10-4
10-2
10-8
10-6 10-1 S t a n d a r d d e v i a t i o n σ(τ) /(°/h )
10-2
100
10-6
10-4
S t a n d a r d d e v i a t i o n σ(τ) /(°/h )
103
10-2
10-1
100
101
102
τ/s 图2 偏置不稳定性噪声各方差分析曲线对比图
Fig.2 Comparison log-log plot of bias instability
noise variance analysis
第39卷第1期 石国祥 等:总方差方法在光纤陀螺随机误差分析中的应用
67
对比两种方差分析法拟合得到的各噪声项系数,它们在量级上基本相当,可作为评价光纤陀螺性能的一种有效手段。进一步分析各噪声系数大小,发现改进的总方差法能更明确地辨识出影响该光纤陀螺精度的主要误差源为速率斜坡噪声,为后续采取相应措施提高光纤陀螺精度提供依据。
4 结 论
总方差方法克服了Allan 方差估计值在平均因子增大时,数据对称带来的计算值“崩溃”问题,因此被引入到光纤陀螺随机噪声分析当中,它在平均因子较大的情况下提高了估计的置信度。但在分析角度随机游走噪声、量化噪声和指数相关噪声时,总方差方法估计值偏大,不能真实反映噪声水平,本文在分析总方差与Allan 方差计算方法的基础上,提出改进的总方差分析法。仿真结果表明,对总方差分析法做出的改进能使其更好的适应光纤陀螺输出信号处理。相对于Allan 方差分析方法,改进的总方差分析方法能准确辨识出影响光纤陀螺精度的主要随机噪声类型,并估计出相应的噪声水平,是一种有效的陀螺误差分析统计工具。 参考文献:
[1] ALLAN D W. Statistics of Atomic Frequency Standards [J]. Proceedings of the Annual IEEE International Frequency
Control Symposium (S0161-6404),1996,54(2):221-230.
[2] 张慧君,李孝辉,边玉敬. 用总方差进行频率稳定度的估计 [J]. 时间频率学报,2003,26(1):48-53.
ZHANG Hui-jun ,LI Xiao-hui ,BIAN Yu-jing. The Estimation of Frequency Stability by Total Variance [J]. Journal of Time and Frequency ,2003,26(1):48-53.
[3] 韩军良,葛升民,沈毅. 基于总方差方法的光纤陀螺随机误差特性研究 [J]. 哈尔滨工业大学学报,2007,39(5):708-711.
HAN Jun-liang ,GE Sheng-min ,SHEN Yi. Research on the Random Error Properties of FOF Based on Total Variance [J]. Journal of Harbin Institute of Technology ,2007,39(5):708-711.
[4] 王 . 光纤陀螺动态测试与噪声分析的研究 [D]. 哈尔滨:哈尔滨工程大学,2008:37-47.
WANG Jun. Research on Dynamic Characteristics and Noise Analysis of FOG [D]. Harbin :Harbin Engineering University ,2008:37-47.
[5] HOWE D A. Total Deviation Approach to Long-term Characterization of Frequency Stability [J]. IEEE Transactions on
Ultrasonics ,Ferroelectrics and Frequency Control (S0885-3010),2000,47(5):1102-1110. ( 下转第87页 )
图4 实测数据的方差分析曲线对比图
Fig.4 Comparison log-log plot of real data variance analysis
103
10-2 10-1 100 101
102
103
10-2
10-1
100
101
102
10-2
10-1 100
σ(τ)/(°/h )
10-2
10-1 100 τ/s
τ/s
(a) Allan standard deviation analysis plot
(b) Improved total standard deviation analysis plot
第39卷第1期 王本才 等:双站纯方位定位中相关问题研究 87 the localization algorithms based on sensor management. Finally, the equivalence between the two kinds of localization error covariance is studied. Above analysis can help to clarify the mechanism of dual-sensor BO localization, and then help to improve its localization precision.
References:
[1]万方,丁建江,郁春来. 利用空频域信息的固定单站无源探测定位方法 [J]. 探测与控制学报,2010,32(3):91-95.
WAN Fang,DING Jian-jiang,YU Chun-lai. Fixed single observer passive detection and location using spatial-frequency domain informations [J]. Journal of Detection & Control,2010,32(3):91-95.
[2]陈金广,李洁,高新波. 改进的基于几何约束的加权被动定位算法 [J]. 光电工程,2010,37(2):16-21.
CHEN Jin-guang,LI Jie,GAO Xin-bo. Modefied weighted passive localization algorithm based on geometric constraint [J].
Opto-Electronic Engineering,2010,37(2):16-21.
[3]Isler V,Bajcsy R. The sensor selection problem for bounded uncertainty sensing models [J]. IEEE Trans. Autom. Sci.
Eng(S1545-5955),2006,3(4):372-381.
[4]Smith D,Singh S. Approaches to multisensor data fusion in target tracking:A survey [J]. IEEE Trans. on Knowl. Data
Eng(S1041-4347),2006,18(12):1696-1710.
[5]Lui K W K,Chan F K W,So H C. Accurate time delay estimation based passive localization [J]. Signal Process(S0165-1684),
2009,89:1835-1838.
[6]丁玉美,阔永红,高新波. 数字信号处理—时域离散随机信号处理 [M]. 西安:西安电子科技大学出版社,2002:2-16.
DING Yu-mei,KUO Yong-hong,GAO Xin-bao. Digital signal processing—time domain discrete random signal processing [M]. Xi’an:Xidian University Press,2002:2-16.
[7]XIU J J,HE Y,WANG G H,et al. Constellation of multisensors in bearing-only location system [J]. IEE Proc. Radar Sonar
Navig(S2004-5061),2005,152(3):215-218.
[8]WANG G H,BAI J,HE Y,et al. Optimal deployment of multiple passive sensors in the sense of minimum concentration ellipse
[J]. IET Radar Sonar Navig(S2008-0009),2009,3(1):8-17.
[9]Paradowski L R. Uncertainty ellipses and their application to interval estimation of emitter position [J]. IEEE Trans. on
Aerosp. Electron. Syst(S0018-9251),1997,33(1):126-133.
[10]Torrieri D J. Statistical theory of passive location systems [J]. IEEE Trans. on Aerosp. Electron. Syst(S0018-9251),1984,
20(2):183-198.
[11]Oshman Y,Davidson P. Optimization of observer trajectories for bearings-only target localization [J]. IEEE Trans. Aerosp.
Electron. Syst(S0018-9251),1999,35(3):892-902.
[12]Hmam H. Scan-based emitter passive localization [J]. IEEE Trans. Aerosp. Electron. Syst(S0018-9251),2007,43(1):36-54.
JJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJJ ( 上接第67页 )
[6] 韩军良,葛升民,沈毅. 数字闭环光纤陀螺建模与仿真研究 [J]. 系统仿真学报,2008,20(4):833-836.
HAN Jun-liang,GE Sheng-min,SHEN Yi. Research on Modeling and Simulation of Digital Closed-loop FOG [J]. Journal of System Simulation,2008,20(4):833-836.
[7] 陈婧,宋凝芳,李敏. 小波分析在光纤陀螺分形噪声模拟中的应用 [J]. 电光与控制,2010,17(5):50-53.
CHEN Jian,SONG Ning-fang,LI Min. Simulation of Fractal Noise in Fiber Optic Gyroscope Using Wavelet Analysis [J].
Electronics Optics & Control,2010,17(5):50-53.
[8] 葛升民,边志强,韩军良,等. 光纤陀螺随机误差特性仿真与辨识 [J]. 测试技术学报,2008,22(4):328-332.
GE Sheng-min,BIAN Zhi-qiang,HAN Jun-liang,et al. Research on Simulation and Identification of Random Error Properties for FOG [J]. Journal of Test and Measurement Technology,2008,22(4):328-332.
光纤陀螺技术规范
光纤陀螺技术岗位规范 1 范围 本规范规定了光纤陀螺岗位职责和岗位标准。。 本规范适用于光纤陀螺岗位的初级、中级、高级职务人员。 2 引用标准 Q/AG L07 1.1-2003职工政治思想和职业道德通用标准 3 岗位职责 3.1负责光纤陀螺初样、正样、和定型产品研制的全部技术工作。 3.2严格贯彻执行国标、部标、企标及有关科研技术、质量管理和安全技术法规。 3.3负责项目、技术论证、可行性研究论证、技术经济分析和项目的申报工作。 3.4根据研制合同,制定阶段和年度工作计划,并组织实施。 3.5参加本专业及相关专业的技术会议,评审本专业范围内的科研成果。 3.6贯彻全面质量管理,负责对试验中出现的各种技术问题进行分析论证、改进设计。3.7根据工程化的实际要求,改进光纤陀螺的性能、环境适应性,不断采用新技术、新工艺改制和研究新样机,以满足武器装备的新需求。 3.8根据项目进展情况,适时编写专题技术总结、专题研究报告和鉴定申请报告。 3.9负责技术转让,技术咨询,技术服务以及资料管理和完成技术资料归档工作。 4 岗位标准 4.1 政治思想与职业道德 执行Q/AG L07 1.1-2003职工政治思想与职业道德通用规范 4.2文化程度 4.3 专业理论知识
4.3.1 初级职务 4.3.1.1具有高等数学、物理光学、模拟和数字电路等基础理论知识。 4.3.1.2具有光纤陀螺的原理及构成等专业理论知识。 4.3.1.3掌握光纤陀螺性能指标测试的流程和试验规范。 4.3.1.4懂得光纤陀螺技术参数的含义。 4.3.1.5了解光纤陀螺的研制过程和有关技术标准。 4.3.1.6初步掌握一门外语,并能查阅本专业书刊、资料。 4.3.2 中级职务 4.3.2.1具有光纤技术、信号分析、自动控制、计算机接口等基础理论知识。 4.3.2.2熟悉各种相关光学和电子仪器设备的操作,精通电路图。 4.3.2.3熟悉光纤陀螺的组装、调试以及技术指标的采样测试。 4.3.2.4掌握光纤陀螺的研究现状及存在的问题,了解关键技术。 4.3.2.5熟悉光纤陀螺各种技术参数的形成原因和改进方向。 4.3.2.6掌握一门外语,并能较熟练的查阅本专业书刊、资料。 4.3.3 高级职务 4.3.3.1精通光纤陀螺信号分析、噪声处理、电路检测等专业知识。 4.3.3.2精通光纤陀螺的原理、构成以及和光纤陀螺有关的系统知识,熟悉光纤以及各连接器件参数对光纤陀螺的影响。 4.3.3.3熟悉自控理论一般的数学建模,精通信号检测反馈理论。 4.3.3.4精通光纤光路结构分析、电路设计以及器件接口等理论和方法,掌握计算机软件的一般编程和应用。 4.3.3.5 熟悉项目的研制程序、典型技术和有关标准。 4.3.3.6掌握一门外语,并能熟练的查阅和笔译本专业的书刊、资料。 4.4 实际工作能力 4.4.1 初级职务 4.4.1.1能按步骤的完成光纤陀螺的器件焊接、电路板的制作等。
MEMS陀螺误差辨识与补偿
2010年第29卷第3期 传感器与微系统(T r a n s d u c e r a n dM i c r o s y s t e mT e c h n o l o g i e s) M E M S陀螺误差辨识与补偿 谈振藩,张勤拓 (哈尔滨工程大学自动化学院,黑龙江哈尔滨150001) 摘 要:由于制造工艺等原因,M E M S陀螺的随机漂移非常大,严重影响了系统的性能。通过自制的基于 M E M S的捷联惯导系统的相关实验,对M E M S陀螺的确定性误差和随机误差分别进行了辨识和补偿。完 成确定性误差补偿,对M E M S陀螺随机误差进行了时间序列分析,并建立了A R模型,根据所选模型参数 建立了随机误差的系统方程,采用经典卡尔曼滤波进行随机误差补偿。实验结果说明:无论是静态下还是 动态下,补偿后信号的方差都大大下降,说明了滤波效果较为明显,具有一定的工程应用价值。 关键词:M E M S陀螺;时间序列分析;A R模型;卡尔曼滤波 中图分类号:T P212 文献标识码:A 文章编号:1000—9787(2010)03—0039—03 E r r o r i d e n t i f i c a t i o na n dc o m p e n s a t i o no f ME MSg y r o s c o p e T A NZ h e n-f a n,Z H A N GQ i n-t u o (C o l l e g e o f A u t o m a t i o n,H a r b i nE n g i n e e r i n g U n i v e r s i t y,H a r b i n150001,C h i n a) A b s t r a c t:M E M Sg y r o's r a n d o m d r i f t i s v e r yl a r g e,b e c a u s eo f t h em a n u f a c t u r i n gp r o c e s sa n do t h e r r e a s o n s, w h i c hs e r i o u s l y a f f e c t o n s y s t e mp e r f o r m a n c e.T h r o u g h e x p e r i m e n t s o f M E M S s t r a p d o w n i n e r t i a l n a v i g a t i o ns y s t e m, d e t e r m i n i s t i c a n ds t o c h a s t i c e r r o r w a s i d e n t i f i e da n dc o m p e n s a t e d.A f t e r d e t e r m i n i s t i ce r r o r w a s c o m p e n s a t e d,t h e s t o c h a s t i ce r r o r w a s a n a l y z e d b a s e d o nt i m e s e r i e s a n dA Rm o d e l w a s s e t u p.S y s t e m e q u a t i o no f s t o c h a s t i ce r r o r w a s e s t a b l i s h e d b a s e d o nt h e s e l e c t e dm o d e l a n dt h ee r r o r w a s c o m p e n s a t e db y K a l m a nF i l t e r.T e s t r e s u l t s s h o w t h a t v a r i a n c e o f M E M S g y r o s c o p e s t o c h a s t i c e r r o r r e d u c e d g r e a t l y a f t e r f i l t e r,w h i c h i l l u s t r a t e s t h e f i l t e r i n g e f f e c t i s o b v i o u s,a n d h a s a c e r t a i nv a l u e o f e n g i n e e r i n g a p p l i c a t i o n. K e yw o r d s:M E M S g y r o s c o p e;t i m e s e r i e s a n a l y s i s;A Rm o d e l;K a l m a nf i l t e r 0 引 言 微机电系统(m i c r o-e l e c t r o-m e c h a n i c a l-s y s t e m,M E M S)陀螺仪已经出现了近二十年[1],与其他陀螺相比,M E M S陀螺在体积、成本、功耗和抗冲击能力等方面都存在很大优势,但由于早期精度较低,并没有引起重视。近些年,随着微电子加工技术的发展,M E M S惯性传感器特别是陀螺仪的精度获得大幅度的提高。基于M E M S惯性传感器的惯性导航系统己成为当今惯性技术领域的一个重要的研究热点。西北工业大学的苑伟政教授提出了虚拟陀螺的概念,通过研究同类传感器的相关性来提高其测量精度;东南大学的吉训生博士,把形态学滤波的思想引入到M E M S陀螺降噪中,具有一定的理论研究意义[2]。另外,还有很多学者提出了新的思路和方法,并仿真取得了一定的效果。但目前的众多学者的研究多处于理论研究方面,大多集中在对漂移的离线降噪。 M E M S陀螺仪精度较低的主要原因是输出信号中随机噪声含量较大,因此,在使用前对陀螺随机误差进行辨识和 收稿日期:2010—01—04降噪处理是十分必要的[3]。目前常用的陀螺仪随机误差辨识方法有自回归滑动平均(A R M A)建模法、功率谱密度分析(P S D)法和A l l a n方差分析法[4]。哈尔滨工程大学的张树侠教授针对激光陀螺和光纤陀螺的特点,分别建立了A R M A模型[5,6];东南大学的吉训生在对M E M S陀螺随机漂移信号建立A R(2)模型后,采用鲁棒性很强的H ∞ 滤波 方法,证明了H ∞ 滤波效果和实时性比小波变换要好[7]。 本文针对实际系统,从陀螺测量模型出发,全面地辨识出陀螺各误差项,尤其对M E M S陀螺随机噪声进行了建模和补偿,具有一定的工程实用价值。 1 M E M S捷联惯导系统 M E M S捷联惯导系统由M E M SI M U,信号采集电路,导航计算机,显示器,数字式电子罗盘H M R3000,G P S,键盘和电源等组成。 M E M S惯性测量单元(M E M SI M U)由6只M E M S陀螺和6只M E M S加速度计组成。M E M S捷联惯导系统框图 39 DOI:10.13873/j.1000-97872010.03.003
总方差方法在光纤陀螺随机误差分析中的应用
电V ol.39, No.1 第39卷第1期 光工程 2012年1月Opto-Electronic Engineering Jan, 2012 文章编号:1003-501X(2012)01-0062-06 总方差方法在光纤陀螺随机误差分析中的应用 石祥 国1,陈坚1,叶军1,王林2 ( 1. 第二炮兵工程学院,西安 710025; 2. 第二炮兵驻孝感地区军事代表室,湖北孝感 432100 ) 摘要:总方差方法被引入到光纤陀螺随机误差特性分析当中,有效克服了传统Allan方差法在长相关时间上计算易出现“崩溃”的问题。但用它直接分析光纤陀螺随机噪声存在算法偏差,不能真实反映角度随机游走噪声、量化噪声和指数相关噪声方差值,因此在算法上对总方差提出改进,使其适用于光纤陀螺噪声分析。对模拟的各项随机噪声进行仿真计算,验证改进后总方差方法可有效辨识噪声类型和水平。对光纤陀螺实测数据方差分析表明改进的总方差方法在平均因子较大的情况下可提高估计置信度,方差值稳定性好,比Allan方差法能更精确地分析出噪声项系数。 关键词:光纤陀螺;Allan方差;总方差;功率谱密度 中图分类号:TN253 文献标志码:A doi:10.3969/j.issn.1003-501X.2012.01.011 Applications of Total Variance Method in Random Error Analysis of the Fiber Optic Gyro Signal SHI Guo-xiang1,CHEN Jian1,YE Jun1,WANG Lin2 ( 1. The Second Artillery Engineering College, Xi’an 710025, China; 2. The Second Artillery Representative Room of Xiaogan District, Xiaogan 432100, Hubei Province, China ) Abstract: Total variance is used to analyze the random noise of Fiber Optic Gyroscope (FOG), which efficiently solves the problem that the Allan variance calculation is easy to be unstable at long-term τ values. But there is algorithm error with total variance when analyzing the random noise of FOG directly, which cannot really reflect the variances of rate random walk noise, quantization noise and exponentially correlated noise. So an improved method based on total variance is presented to suit random noise analysis of FOG. The estimation performance with the simulated random noise shows that the improved total variance can efficiently identify the noise types and levels. According to the analysis of measured FOG signal, it can improve the confidence in the case of great mean index, the values of variance have a good stability, and it is better and more exact than Allan Variance in identifying noise coefficient. Key words: fiber optic gyroscope; Allan variance; total variance; power spectrum density 0 引 言 光纤陀螺(FOG)作为新一代的全固态惯性器件,已被广泛地应用于捷联式惯性导航系统。但由于其自身的结构特点和易受环境影响,输出信号中含有大量随机噪声,这些噪声往往呈现非平稳性和非正态分布特性,它们是影响光纤陀螺精度的一个关键因素。对光纤陀螺输出信号中的噪声进行有效地估计和辨识有助于进一步分析随机误差产生的原因,采取相应的补偿方法提高光纤陀螺性能。 Allan方差分析法作为IEEE认可的光纤陀螺误差项分析标准方法,能非常容易地对各种误差源及整个噪声统计特性进行细致的表征和辨识。“差分”是Allan方差分析的核心思想,即信号时域数据的二次差分收稿日期:2011-07-17; 收到修改稿日期:2011-10-19 作者简介:石国祥(1984-),男(汉族),陕西西安人。硕士研究生,研究方向:导航、制导与控制。E-mail:stone.712@https://www.360docs.net/doc/7810828914.html,。
光纤陀螺随机误差的测定方法研究(精)
第33卷第2期应用科技V01.33.No.22006年2月AppliedScienceandTechnologyFeb.2006文章编号:1009—671X(2006)02—0040—03 光纤陀螺随机误差的测定方法研究 罗超1,贺林2,孙蓉1 (1.哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;2.哈尔滨工程大学动力与能源工程学院,黑龙江哈尔滨150001) 摘要:针对光纤陀螺的随机噪声,分析了其产生的来源;对于5种主要的噪声源,运用IEEE公认的在时域上 对频域稳定性进行分析的方法——Allan方差法,进行了特性分析,并给出了误差系数的计算公式.同时介绍了 只测定角度随机游走系数时的2种简单测定方法:模型拟合法、归一化计算法;对于一组实际的陀螺零偏数据 进行了测定. 关键词:光纤陀螺;随机误差;Allan方差 中图分类号:TH824.3文献标识码:A Researchonthemeasurementofrandomerroroffiberopticgyro LUOCha01,HELin2,SUNRon91 (1.SchoolofAutomation,HarbinEngineeringUniversity,Harbin150001,China;2.SchoolofPowerandEnergyEngineering,HarbinEngineeringUniversity,Harbin150001,China) Abstract:Thesourceofrandomerrorsoffiberopticgyro(FOG)isanalysed.For5mainnoises,theAllanvariancemethod,whichisthemethodtoanalysethefrequencydomainstabilityontimedomainacknowledgedbyIEEE,isusedtomakeacharacteristicanalysis,andtheformulastocalculateerrorcoefficientsaregiven.Again,twosimplemeasuringmethods,modelfittingmethodandnormalizedcalculationalmethodaregiventomeasureonlytheangular
光纤陀螺仪的应用及发展
光纤陀螺仪的应用及发展 谷军,蔺晓利,何南,姜凤娇,邓长辉 (大连海洋大学信息工程学院) 摘要:本文介绍了光纤陀螺的工作原理,并根据光纤陀螺的特点介绍了在各个领域的应用,阐述了光纤陀螺在国内外的发展现状,并指出了光纤陀螺的发展趋势。从发展角度看,光纤陀螺仪将成为21世纪前期的发展重点。 关键词:光纤陀螺;现状;应用; 0 引言 萨格纳克(Sagnac)在1913年首先论证了运用无运动部件的光学系统能够检测出相对惯性空间的旋转的奇特现象,现在统称为萨格纳克效应。1976年Vali和Shorthill首次提出了光纤陀螺(Fiber optic gyro)的概念,它标志着第二代光学陀螺的诞生。光纤陀螺一问世就以其明显的优点、结构的灵活性以及诱人的前景引起了世界上许多科学家和工程师的普遍关注。国内对光纤陀螺的研究也有20多年的历史,经历开环到闭环的研究历程。在20多年的研究过程中,光纤陀螺的广泛应用前景已经得到了专家的认可,光纤陀螺作为惯性技术的核心器件,已经逐渐成为陀螺市场的主流产品。人类对光纤陀螺的需求也变得十分迫切。 光纤陀螺的应用非常广泛,是基于Sagnac效应的原理工作的。作为继激光陀螺仪之后出现的新一代陀螺,各国的研制工作已经取得了重大的进展。光纤陀螺仪的研制对惯性导航和控制领域十分重要,随着计算机、微电子和光纤技术的发展和应用,它将取代传统的机械陀螺和平台惯导系统。与机械陀螺相比,光纤陀螺无运动部件、使用寿命长;全固化结构、抗冲击能力强;测量动态范围大、无预热时问、启动时问短;不受地球吸引力影响;工艺相对简单,价格便宜;对捷联应用有先天优势。与激光陀螺相比,光纤陀螺的成本低、性价比高;体积小、功耗低、应用灵活;克服了激光陀螺闭锁带来的负效应;随着工艺和信号处理方案的发展,精度也可以和激光陀螺相当。 1 光纤陀螺仪 光纤陀螺仪是光学陀螺仪的一种。所谓光学陀螺仪就是利用萨格纳克Sagnac)效应构成的陀螺仪。利用光纤线圈构成的干涉仪效应来敏感角运动的装置称为干涉型光纤陀螺仪(IFOG);采用光纤作为谐振器来敏感角运动的装置称为谐振型光纤陀螺仪(RFOG);利用布里渊光纤环形激光器的频率变化原理构成的测角装置称为布里渊光纤陀螺仪(BFOG)。由于光学陀螺仪不象传统陀螺那样,依靠自转子的动量矩来敏感角运动。所以国外学术界也把这类陀螺定义为非陀螺仪角运动敏感器。 1.1光纤陀螺仪的特点 光纤陀螺仪作为一种新兴传感器件,具有许多深受欢迎的特点:(1)无运动部件,仪器牢固稳定,耐冲击和抗加速度运动;(2)结构简单,零部件少,价格低廉;(3)启动时间短(原理上可瞬间启动);(4)检测灵敏度和分辨率高(可达10 -7rad/s);(5)可直接用数字输出并与计算机接口联网;(6)动态范围极宽;(7)寿命长,信号稳定可靠;(8)易于采用集成光路技术;(9)克服了激光陀螺因闭锁现象带来的负效应。 光纤陀螺最大的特点是可根据不同的用途,选择不同的光纤长度和线圈直径及不同的信息处理方法,可覆盖陆地、航空、航天、航海等所有陀螺仪应用范围。与传统陀螺仪(液浮
光纤陀螺技术规范
光纤陀螺技术规范 Q/AG L07 ×.××-2003 光纤陀螺技术岗位规范1 范围本规范规定了光纤陀螺岗位职责和岗位标准。。 本规范适用于光纤陀螺岗位的初级.中级.高级职务人员。 2 引用标准 Q/AG L071.1-2003职工政治思想和职业道德通用标准 3 岗位职责3.1负责光纤陀螺初样.正样.和定型产品研制的全部技术工作。 3.2严格贯彻执行国标.部标.企标及有关科研技术.质量管理和安全技术法规。 3.3负责项目.技术论证.可行性研究论证.技术经济分析和项目的申报工作。 3.4根据研制合同,制定阶段和年度工作计划,并组织实施。 3.5参加本专业及相关专业的技术会议,评审本专业范围内的科研成果。 3.6贯彻全面质量管理,负责对试验中出现的各种技术问题进行分析论证.改进设计。 3.7根据工程化的实际要求,改进光纤陀螺的性能.环境适应性,不断采用新技术.新工艺改制和研究新样机,以满足武器装备的新需求。 3.8根据项目进展情况,适时编写专题技术总结.专题研究报告和鉴定申请报告。
3.9负责技术转让,技术咨询,技术服务以及资料管理和完成技术资料归档工作。 4 岗位标准4.1 政治思想与职业道德执行Q/AG L071.1-2003职工政治思想与职业道德通用规范4.2 文化程度4.3 专业理论知识4.3.1 初级职务4.3.1.1具有高等数学.物理光学.模拟和数字电路等基础理论知识。 4.3.1.2具有光纤陀螺的原理及构成等专业理论知识。 4.3.1.3掌握光纤陀螺性能指标测试的流程和试验规范。 4.3.1.4懂得光纤陀螺技术参数的含义。 4.3.1.5了解光纤陀螺的研制过程和有关技术标准。 4.3.1.6初步掌握一门外语,并能查阅本专业书刊.资料。 4.3.2 中级职务4.3.2.1具有光纤技术.信号分析.自动控制.计算机接口等基础理论知识。 4.3.2.2熟悉各种相关光学和电子仪器设备的操作,精通电路图。 4.3.2.3熟悉光纤陀螺的组装.调试以及技术指标的采样测试。 4.3.2.4掌握光纤陀螺的研究现状及存在的问题,了解关键技术。 4.3.2.5熟悉光纤陀螺各种技术参数的形成原因和改进方向。 4.3.2.6掌握一门外语,并能较熟练的查阅本专业书刊.资料。
光纤陀螺的误差分析及建模(精)
光纤陀螺的误差分析及建模 光纤陀螺具有许多独特的优点,由此引起了世界上众多研究机构的重视。目前光纤陀螺已经广泛的应用于民用和军用战术武器的惯性系统中。各国 的研究机构也在大力研制应用于航海、航天等领域中的高精度惯导级光纤陀 螺。光纤陀螺是基于萨格奈克(Sagnac)效应的广义相对论性效应而制成的角速 率传感器,它代表了惯性仪表与元件发展的一个新方向,与传统的机械陀螺相比,光纤陀螺采用全固态设计,结构简单,反映速度快,抗冲击能力强,动态范围宽。 对它的随机误差进行数理统计分析,找出其统计特性规律,并用一定的方法对其 进行补偿,对提高光纤陀螺的导航精度将产生重要意义。本文对于量化噪声、角度随机游走、零偏稳定性、速率随机游走、速率斜坡等5种主要的噪声源,通过运用Allan方差法便可很容易地辨识出影响光纤陀螺性能的各种因素,为有针对性的采取抑制噪声措施和采用各种滤波算法提供一定的参考依据;在仿真分析中,通过对比不同小波基、不同消失矩、不同分解层数、不同阈值处理方法等情况 下陀螺信号的小波去噪效果,设计了合适的滤波方案,从抑制光纤陀螺随机噪声 的角度出发,利用小波分析法对光纤陀螺的输出进行滤波处理,验证了滤波效果;用数学建模的理论对光纤陀螺的输出进行ARMA数学建模,对建模以后的输出进 行卡尔曼滤波,实现对随机误差的补偿,并且取得比较好的补偿效果。 同主题文章 [1]. 王海,陈家斌,黄威,张延顺,汤继强. 光纤陀螺随机漂移测试及分析' [J]. 光学技术. 2004.(05) [2]. 李战,冀邦杰,国琳娜,王海陆,严由嵘. 光纤陀螺零漂信号的Allan方 差分析' [J]. 鱼雷技术. 2007.(02) [3]. 缪玲娟. 小波分析在光纤陀螺信号滤波中的应用研究' [J]. 宇航学报. 2000.(01) [4]. 缪玲娟,张方生,沈军,刘伟. 光纤陀螺漂移的数据分析及建模(英文)' [J]. Journal of Beijing Institute of Technology. 2002.(01) [5]. 罗超,贺林,孙蓉. 光纤陀螺随机误差的测定方法研究' [J]. 应用科技. 2006.(02) [6]. 李凤海,郝炜亮,许化龙. 基于小波理论抑制光纤陀螺零漂的研究' [J]. 光电子技术. 2005.(01) [7].
光纤陀螺随机误差建模与滤波方法研究(精)
第34卷增刊光学技术Vol.34Suppl. 2008年12月OPTICALTECHNIQUEDec.2008 文章编号:100221582(2008)S2******* 光纤陀螺随机误差建模与滤波方法研究 李晓峰,徐军,张胜修 (第二炮兵工程学院,西安710025) Ξ 摘要:提出了一种适用于高精度光纤陀螺的静态输出信号建模的时间序列模型,尔曼滤波器。结果表明,该建模和滤波方法有效地减小了FOG的误差,,提高了导航精度,具有较好的实用价值。 关键词:光纤陀螺;时间序列;随机漂移;卡尔曼滤波中图分类号:U666.1文献标识码:A Studyonthemodelinggyroscoperandomerror ,J,ZHANGSheng2xiu EngineeringCollege,Xi′an710025,China) Abstract:whichcanbeappliedinthemodelingofhigh2preciseFOG′sstaticoutputsignalispre2 sented,andtheKalmanfilterofFOGrandomerrorisbuilt.Theresultshowsthatthismodelingan dfilteringmethodcanreducetheerrorofhigh2preciseFOG.Thenavigationerrorsaredepresse d,andthenavigationprecisionisimproved. Keywords:FOG;timesequence;randomdrift;Kalmanfilter 1引言 陀螺仪是用于自主测量载体相对于惯性空间旋转运动的 元件,因此以陀螺仪为核心的惯性测量系统在飞行器控制与制导,空中、海上和陆上导航/定位中都起着至关重要的作用。光纤陀螺仪是利用Sagnac效应的角速度传感器。Sagnac效应是指当环形干涉仪旋转时,产生一个正比于旋转速率的相位差。光纤陀螺仪具有可靠性高、抗冲击、频带宽、成本低、平均无故障时间长等诸多优点,因此在惯性制导和导航的许多应用领域[1,2],已经将光纤陀螺仪作为一项关键技术进行研究。
【CN109798920A】基于改进EMD的MEMS陀螺随机误差建模滤波方法【专利】
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910119366.3 (22)申请日 2019.02.18 (71)申请人 兰州交通大学 地址 730000 甘肃省兰州市安宁区安宁西 路118号 申请人 陈光武 (72)发明人 陈光武 刘洋 杨菊花 程鉴皓 (74)专利代理机构 北京智客联合知识产权代理 事务所(特殊普通合伙) 11700 代理人 李戍 (51)Int.Cl. G01C 25/00(2006.01) G06K 9/62(2006.01) G06F 17/18(2006.01) (54)发明名称 基于改进EMD的MEMS陀螺随机误差建模滤波 方法 (57)摘要 本发明公开了一种基于改进EMD的MEMS陀螺 随机误差建模滤波方法,包括:使用EMD算法在原 始信号中提取IMF分量;基于提取的所述IMF分量 进行建模;对建模得到的模型进行Kalman滤波, 对MEMS陀螺随机误差进行实时补偿。以实现提高 MEMS陀螺仪的测量精确的优点。权利要求书2页 说明书7页 附图3页CN 109798920 A 2019.05.24 C N 109798920 A
1.一种基于改进EMD的MEMS陀螺随机误差建模滤波方法,其特征在于,包括: 使用EMD算法在原始信号中提取IMF分量; 基于提取的所述IMF分量进行建模; 对建模得到的模型进行Kalman滤波,对MEMS陀螺随机误差进行实时补偿。 2.根据权利要求1所述的基于改进EMD的MEMS陀螺随机误差建模滤波方法,其特征在于,所述使用EMD算法在原始信号中提取IMF分量,包括: 用EMD算法将原始信号分解为多个IMF和非随机项之和; 计算多个IMF的自相关函数,提取出主要含噪的IMF分量。 3.根据权利要求2所述的基于改进EMD的MEMS陀螺随机误差建模滤波方法,其特征在于,所述基于提取的所述IMF分量进行建模,包括: 对提取的IMF分量进行平稳性和正态性检验。 4.根据权利要求3所述的基于改进EMD的MEMS陀螺随机误差建模滤波方法,其特征在于,所述使用EMD算法在原始信号中提取IMF分量的步骤之前,还包括: 将测量到的陀螺随机数据表示为: y(n)=r(n)+x(n), 式中,r(n)为非随机项,包括趋势项和周期性;而x(n)为随机项,y(n)为陀螺随机数据;基于表达式获取原始信号。 5.根据权利要求4所述的基于改进EMD的MEMS陀螺随机误差建模滤波方法,其特征在于, 所述使用EMD算法在原始信号中提取IMF分量中,提取的IMF必须满足以下两个条件:在整个序列上,极值点和过零点的个数必须相同或者最多相差一个; 在每一个点上,上包络线和下包络线的平均值为零。 6.根据权利要求5所述的基于改进EMD的MEMS陀螺随机误差建模滤波方法,其特征在于,所述使用EMD算法在原始信号中提取IMF分量中,所述EMD算法具体包括: 设y(t)为原始信号,首先找出该信号的所有极大值点和极小值点,得到多个极值点;对所述多个极值点分别进行三次样条插值,从而形成上包络线a(t)和下包络线b(t),以保证所有的极值点在这两条包络线之间; 计算两条包络线的均值,并定义原始信号和均值的差值,并判断差值是否满足IMF的两个条件; 从而将原始信号分为n个IMF分量和非随机项之和: imf i 为本征模态函数,r n 为非随机项,n为自然数。 7.根据权利要求6所述的基于改进EMD的MEMS陀螺随机误差建模滤波方法,其特征在于, 所述计算多个IMF的自相关函数,提取出主要含噪的IMF分量,包括: 根据自相关函数的函数值在零点处最大,其余点的函数值迅速衰减到零,呈现出弱相关性;而对于有用信号主导的数据序列,虽然自相关函数值也是零点处最大,但其他点的函数值并非迅速衰减到零,而是缓慢下降、存在一定规律的变化,呈现出强相关性的特性对IMF分量进行筛选分类。 权 利 要 求 书1/2页2CN 109798920 A
陀螺安装误差影响视轴稳定平台精度的机理研究_李岩
第34卷第9期 光电工程V ol.34, No.9 2007年9月 Opto-Electronic Engineering Sep, 2007文章编号:1003-501X(2007)09-0010-06 陀螺安装误差影响视轴稳定 平台精度的机理研究 李岩,张智永,范大鹏 ( 国防科学技术大学机电工程与自动化学院,湖南长沙 410073 ) 摘要:针对陀螺安装误差影响视轴稳定平台精度的问题,深入研究了其影响的作用机理及程度。以两轴稳定平台为具体对象,应用PIOGRAM图方法,讨论了安装误差对陀螺敏感量的运动学影响。并对陀螺安装误差影响系统精度以某实际模型为例进行了仿真分析,得出了其对稳定精度影响更为具体的解释。这对陀螺安装误差的标定、机构设计中安装面精度的取定以及误差分配等都具有参考作用。 关键词:视轴稳定平台;稳定精度;陀螺;安装误差 中图分类号:V556 文献标志码:A Principle of the effect of gyro misalignment on the stabilization platforms accuracy LI Yan,ZHANG Zhi-yong,FAN Da-peng ( College of Electromechanical Engineering & Automation, National University of Defense Technology, Changsha 410073, China ) Abstract:Referring to the problem of gyro misalignment effect on the LOS stabilization accuracy, the paper researches the principle and extent of its effect. In this paper, the kinematics impact on the sensitive value of gyro misalignment for two-axis platform was discussed by using the PIOGRAM method. And the quantitative conclusion of the misalignment effect on stabilization accuracy was studied by simulating the practical stabilization platform. The result can be used to explain the effect of gyro misalignment on the stabilization accuracy in detail and to instruct the gyros’ calibration, tolerance selection of alignment faces and error allocation, etc. in the installation of LOS stabilization platform. Key words:LOS stabilization platform; stabilization accuracy; gyro; alignment error 引 言 运动载体光电跟踪、瞄准、测量等功能的实现,其前提在于保证跟踪瞄准仪器(视轴指向)在载体运动环境下相对惯性空间的稳定。当前的视轴稳定平台系统多利用速率陀螺敏感相对惯性空间的角速度实现稳定,依据陀螺安装位置的不同,又可分为直接稳定和间接稳定(捷联)两种方式[1]。捷联稳定通过安装在基座处的陀螺直接敏感基座相对惯性空间的角速度(干扰运动),与轴系回转角速度合成作为反馈参考量驱动伺服系统进行视轴稳定。许多国内外学者也对此类系统的陀螺安装问题进行过试验和标定工作[2-3]。而直接稳定(即平台稳定)方式,陀螺直接敏感被稳定对象(如CCD、红外成像仪、天线、测距机等)的空间角速度,其载体运动角速度经多轴伺服机构耦合至陀螺坐标系,陀螺安装误差影响下的角速度转换关系相对复杂,本文即以直接稳定的视轴稳定平台为对象,采用两轴瞄准线(Line of Sight ,LOS)稳定系统为具体实例,详细地分析陀螺安装误差对系统稳定性能的影响。 收稿日期:2006-11-20;收到修改稿日期:2007-06-15 基金项目:“十五”国防预研项目 作者简介:李岩(1978-),女(回族),吉林松原人,博士,主要研究工作是光电稳定跟踪伺服控制技术。E-mail:yanli_78@https://www.360docs.net/doc/7810828914.html,
光纤陀螺仪的发展及应用
光纤陀螺仪的发展及应用 摘要: 作为光纤传感器的一种,光纤陀螺仪具有了更多的优点,它具有结构紧凑,灵敏度高,工作可靠等等优点,就是因为这些优点,光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。本文主要介绍了光纤陀螺仪的工作原理,特点,分类,应用及发展现状。 关键词: 光纤传感器,陀螺仪,光纤陀螺仪,导航系统。 Abstract: As one of the fiber sensors,FOG has more advantages.It has a compact structure,high sensitivity,high reliability and so on.Just because of these advantages,FOG nearly replace all the traditional mechanical gyroscopes and become the critical component of modern navigational instruments.This paper introduces the working principle,the features,sorts,usage and statues of development of the FOG. Key words: fiber sensors,gyroscopes,FOG,navigation system. 引言: 现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,
光纤陀螺的误差分析
光纤陀螺仪的误差分析目前光纤陀螺的研究和应用中还存在着一些关键技术需要作进一步的深入研究。最突出的问题就是存在许多难以解决的误差源。 一、光纤陀螺仪的分类 光纤陀螺按其光学工作原理可分为三类: 1、干涉式光纤陀螺(IFOG) 2、谐振式光纤头陀螺(RFOG) 3、受激布里渊散射式光纤陀螺(BFOG) 其中干涉式光纤陀螺技术已完全成熟并产业化,而谐振式光纤陀螺和受激式布里渊散射式光纤陀螺还处于基础研究阶段,尚有许多问题需要进一步探索。 所以这里主要探讨干涉式光纤陀螺的误差分析。 二、干涉式光纤陀螺原理 干涉式光纤陀螺的主体是一个萨格奈克(Sagnac)干涉仪,由宽带光源(如超发光二极管或光纤光源)、光纤耦合器、光探测器、Y分支多功能集成光学芯片和光纤线圈组成,其原理基于萨格奈克效应:当陀螺旋转时,光纤线圈内沿顺时针和逆时针方向传播的两束广波之间产生一个与旋转角速率成正比的相位差: 式中:R为光纤线圈的半径;L为光纤长度;为光源平均波长;c为真空中的光速。
图1 干涉式光纤陀螺的机构组成 三、光纤陀螺的噪声来源 由于环境及光纤陀螺本身的各种噪声源的影响,光纤陀螺输出信号中存在着各种随机误差项。为了减少光纤陀螺的误差并提高其精度,需要对其进行性能评价,辨识出影响其精度的主要误差源,以便进一步采取措施消除相关的随机误差。 在实际系统中,萨格纳克效应非常微弱,构成光纤陀螺的每个元件都可能是噪声源,而且存在各种各样的寄生效应,它们都将引起陀螺输出漂移和标度因数的不稳定性,从而影响光纤陀螺的性能。 主要误差源 1.光源噪声 光源是干涉仪的关键组件,光源的波长变化、频谱分布变化、输出光功率的波动、返回光的干扰,都将直接影响干涉的效果。另外,返回到光源的光直接干扰了它的发射状态,引起二次激发,与信号光产生二次干涉,并引起发光强度和波长的波动。 (1)光源的波长变化的影响 可通过信号处理的方法加以解决。若波长变化是由温度变化引起,则可直接测量温度而校正波长,否则,必须测量波长进行校正。 (2)返回光的影响 可采用光隔离器、信号衰减器、或选用超发光二极管(SLD)之类的低相干光源,