振动锤的设计计算

振动锤的设计计算
振动锤是20世纪末迅速发展起来的一种桩工机械,具有施工噪音低、可进行沉拔桩作业、施工范围广等特点;可进行钢管桩、全套管灌注桩、钢板桩、PHC 桩、异型桩、薄壁筒桩(外径800~2000mm ,壁厚100~250mm ,中心充满地基土,现浇灌注而形成的混凝土筒形桩体。)等多种桩型施工。它具有施工速度快、功能多、适应地质广、运输方便和环保等特点,已广泛应用于国内外工程建设的众多领域。 一、沉桩原理
沉桩原理有强迫振动与土壤共振、强迫振动与土桩系统共振、强迫振动与桩体共振、振动冲击几种理论,它们分别是中频振动锤、高频振动锤、超高频振动锤、振动冲击锤的设计原理。
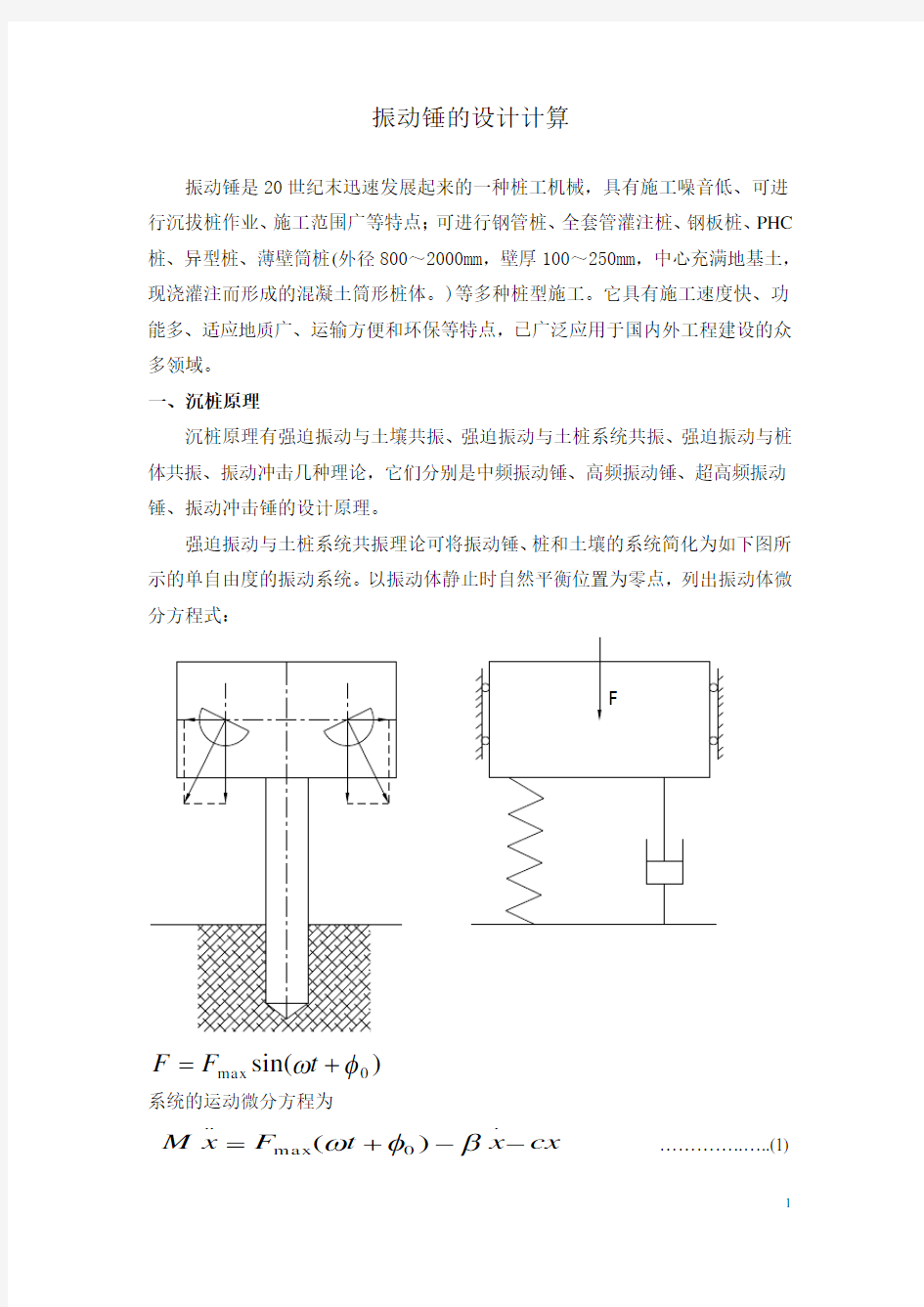
强迫振动与土桩系统共振理论可将振动锤、桩和土壤的系统简化为如下图所示的单自由度的振动系统。以振动体静止时自然平衡位置为零点,列出振动体微分方程式:
)sin(0max t F F φω+=
系统的运动微分方程为
cx
x t F x M --
+=.
0max ..
)(βφω (1)
为激振力的初相位角---0φ M------参振质量
c------土壤的弹性系数
β------阻力系数
Fmax-----最大激振力
最大激振力2max ωr m F o ∑=
每块偏心块的质量---0m
偏心块的偏心距----r
振器干扰力的角频率偏心块转动角速度即激---ω
(1)式移项整理得)sin(max 0.
..
t F cx x x M φωβ+=++ 设时00=φ,上式表达为t f x x B x n ωωsin 2max 2
.
..
=++ (2)
M B B 2/β=----阻尼系数
M
c
n n =----ωω率无阻尼系统的自振圆频
M r m M
F o f ∑==
2max max ω
单位质量最大激振
----m a x f (2)的解为
)sin(.)sin cos (04)(22112
22
22max
αωωωωωω++
+=+--t t c t c r x B f n n Bt n (3)
的相位差干扰力与振动位移之间-----0α
式(3)的前项为齐次方程的通解,其物理特征是衰减振动,是系统对干扰力的
瞬间响应,很快消失。后项为方程的特解,其物理特征是表示系统在简谐干扰力作用下的强迫振动。 这样上式可表达为
)sin(.)sin(04)(02
2
22
m ax
αωαωω
ωω+=
+=+-t t a x B f n
当代入得时,并将M r m o f t
∑=?=+2max
090ωαω
M
r m M r m B o n B n n o n x ∑=∑=
+-+-..4
2
242)22(2
2
22222
4)(ωωωωωωω
ωωωr m o n B n n n n n n ∑=
++-.4
22444
4
22244
2
2ωω
ωωωωωωωωω
M
r m M
r
m o n
n B n
n o n
n B n n n ∑=
=
+-++-∑
..2222222
2
22
222
222222
2.4
)1(.4)(21ωωωωωωωωωωωωωωωωM
r m Z Z Z z o n
n
M n
B ∑+-====
.2
2222
24)1(υυω
ωω
βω
令
为负值。时,当x t ?=+2700αω
M
r m Z Z Z z o n
n
n
B x
∑-
+-====
.2
2222
4)1(υυω
ωω
βω
令
M
r m Z Z Z M r m Z
Z Z o o A ∑-+∑=
+-+-..2
2222
2
2222
4)1(4)1(υυ
M r m Z
Z Z o A ∑=
+-2
4)1(.)(2
2222
υ振幅 ----------(4)
∞
-+=∑=
∞A A Z Z Z A M
r o m .2
22
2
2
2
)
1(4υ令
极限振幅。
称为稳定振幅,又称为∞A 由以上式子看出,当Z=1时,出现共振。当Z >3以上,振幅∞?A A ,这时振动体的振幅不因外界条件变化而变化,也就是说,当振动体
稳定不变。
改变时,振幅基本保持或阻力系数率无阻尼系统的自振圆频βωn 因此,设计时应尽可能选择较高的振动频率ω。
考虑到土壤参与振动的影响,实际振幅小于稳定振幅。
∞=A A α
二、激振器的设计计算
激振器的主要参数为:频率、激振频率、偏心力矩、激振力、激振器质量、振幅及功率。
设计过程可按以下步骤进行:
1、根据使用目的和地层情况确定振动器的类型、变频、变矩的方式。
2、选择激振器的频率、角频率和振幅。
3、初步估算激振器和钻具的质量。
4、计算偏心矩。
5、计算动力机功率。
6、校核激振力。
7、计算最大拔桩力。
8、进行振动锤的激振器的结构设计,并根据实际设计情况修改估算的参数。 9、进行零件的计算和校核,要注意校核轴的自振频率,偏心轮轴的轴承多选用双列球面向心轴承,与轴承配合其表面粗糙度要达到
,配合采
用过渡H7/n6、N7/h6、H8/n7、N8/h7配合。
(一)相关参数的估算:
(1) 激振力 选择激振力时,一方面要满足钢护筒下沉条件的要求,即激振
力F 要大于各土层极限动侧摩阻力之和Tv ,i i V H L T ∑=τ
---------(5)
钢护筒的内外壁周长---L 单位为m
段的单位动摩擦阻力
为对应i i ---τ 饱和砂土、软粘土为6KPa ,饱和砂土、软粘土(有砾石)为8KPa ,塑硬性粘土为15KPa 。
段的钢护筒沉入深度
为对应i H i --- 单位为m ;另一方面,激振力F 与振动锤激振体质量M(振动锤、夹持器、钢护筒三
者总重量)的比值要满足协调方程:31035≤
≤M F
-------(6)。
(2) 振动锤沉桩克服桩端动阻力的估算
根据桩的类型、尺寸和土壤种类,利用以下经验公式估算和检验该振动锤 能否克服桩端阻力,下沉至要求的深度,换言之,即振动体系的重量应大于桩端动阻力。 端动阻力:
对于粘性土,桩端动阻力:0652.08-=NSe R ν (7) 对于砂性土,桩端动阻力:0652.04-=NSe R ν (8) 振动体系重量:ν>R M
(9)
Rv-----桩端动阻力, N 。
N------桩沉入深度土层的最大标准贯入击数。
i
i V H L >T F ∑=τ
S-----桩的横截面面积,2cm 。
e-----自然对数的底。
(3) 振幅 理想振幅由偏心矩除以振动锤激振体质量M(振动锤、夹持器、钢
护筒三者总重量)而求得,实际工作振幅A 受激振力、频率、土壤弹性影
响而改变,为了有效下沉钢护筒,)((0上限振幅起始振幅c A A )A ≤≤,使得振动力大于护筒周围土壤的瞬间全部弹性力,并破坏钢护筒周围土壤,减少阻力。
美国ICE 公司认为:各类型的土质对最小振幅要求有所不同。在沙质
的土壤里,用ICE 振动锤工作,最小振幅为3mm 。在粘土里,最小振幅为6mm 。在水下的沙质土壤中,最小振幅为2mm 就足够了。
法国PTC 公司根据30年的经验,用于评估沉桩的最小振幅列入下表
要求实际工作振幅A >A 0 。
(4) 频率
由表可以看出,各种地层对应的频率为8~19.1Hz ,当Z >3以上,振幅
∞?A A 若振动锤的振动频率f >60Hz 时,除岩层外,其它各地层都可以沉桩。
频率f =n/60 Hz n------偏心块转速r/min 振动锤振动频率:
低频f ≤15Hz ,在较软土壤,振幅15-36mm 。
中频f =15-25Hz ,是强迫振动与土层共振下沉的,振幅7-20mm ,适用粘土层。
高频f =25-60Hz ,此类振动加速度很大,振幅3-8mm ,适宜砂土层。 超高频f ≥60Hz 以上,用于硬土层。
(5) 功率 大型振动锤的功率都在250KW 以上,对现场电源稳定性要求很高,
通常用柴油机作为动力源。
以上相关参数的估算为客户对振动锤的选型提供参考依据,也对设计人员提供设计的最基本的计算依据。 (二)计算激振力
φωsin 20r m F ∑= ---------------------------------(10) )(N F 激振器激振力----
)(0kg m 单块偏心块质量---- )(m r 偏心块的偏心距----
)
/(s rad 激振器的角频率----ω
)(?----离心力与垂线的交角φ
(三)实例计算:
例:有一管桩,外径D=1000mm ,管壁厚14mm ,全长21m ,要沉桩20m ,在其地层先沉入16m 饱和砂土,然后再沉入4m 硬性粘土。 ①计算钢管重量:
kg
H d D 7149100085.72100100085.74
)2.97100(4
)(2222=÷??=
÷??--π
π
②计算各土层极限动侧摩阻力之和Tv :
段的单位动摩擦阻力
为对应i i ---τ,饱和砂土、软粘土为6KPa ,饱和砂土、软粘土(有砾石)为8KPa ,塑硬性粘土为15KPa 。
段的钢护筒沉入深度
为对应i H i --- 单位为m 钢护筒的内外壁周长---L 单位为m
KN F >T F v 1600=,设计时,选择激振力根据要求
③计算桩端动阻力νR :
对于粘性土,桩端动阻力:0652.08-=NSe R ν KN
选择桩沉入深度土层的最大标准贯入击数,N=40 桩的横截面面积S ,2cm 。
24
)2.97100(4
)(7.4332222cm S d D ==
=
--π
π
kg N e NSe R 132681300247.43340880652.00652.0==???==--ν 估计激振力为1600KN 的振动锤的总重量为6000kg 。 夹具重量为250kg 。 吊具重量为250kg 。
振动体系总重量M=7149+6000+250+250=13649kg
根据要求:(振动体系重量)ν>R M ( 桩端动阻力)
kg R kg >M 1326813649==ν,符合要求。
KN N H L T i i V 11651164701)4101516108()972.01(33==??+???+==∑πτ
④计算偏心力矩
选择工作频率为35Hz ,ω=2π×35=219.9 rad/s ,
3101600?=F N 的振动锤激振器
时,
当?=90φ 根据φωsin 20r m F ∑=
整理上式代入相应数据得偏心力矩
m kg r m F
.1.332
3
2
9.2191016000
==
=?∑ω
⑤振幅的估算: mm m A M r m 83.41083.4313649
33
220=?==∑=-?估算估算振幅
根据法国PTC 公司30年的经验,用于评估沉桩的最小振幅表,可预知选择激振力为3101600?=F N ,工作频率为35Hz 的振动锤可以将该桩在该地层激振下沉20米。 ⑥计算激振力
时 ?=90φ或时 ?=270φ
)
(1016001600751)235(1.33sin 3220N r m F ?≈=??==∑πφω
⑦计算桩下沉20m 时的实际振幅
M
r m Z Z Z z i n
n
M n
B A
∑-+====
.2
2222
2)1(42υυωωω
βω
对于振动系统应满足减振条件:Z >3,故取Z=4,可得
s
rad Z
n /975.544
9.219===
ωω
隔振弹簧的总刚度y K
s
rad kg M m N K Z M y /)
()
/(2
2激振器的角频率激振体质量------=
ωω
m N K Z M y /412506992
2
2
2
49.21913649==
=
?ω
系统设计选择n=24个弹簧并联组成的弹簧-质量系统,系统的一个弹簧刚度:
)/(1072.1171877824
41250699
6m N n k k y
?====
ωμβM k 28.0+=又
。系统弹簧的内阻力系数---μ
s 3
.105.1-?=μ kg M /
8429749.2191364928.01718778105.128.03=??+??=+=-ωμκβ
562.0975.54136492842974
2===
??n
M ωβ
υ
13649
1
.33)
41(4562.0442)
1(42..22222
2
2222
-+???-+=∑=
M r m Z Z Z o A υ mm
m 96.41096.43
=?=-(下沉20m 时的实际振幅)
最大振幅的计算
如果最后设计时,得出激振器的质量为2950kg(不含夹持器),则最大振幅
---------------------------(11)
mm m A M r m 2202244.02950
1.33202
max
==?=∑=激 ⑧功率的计算
功率包括维持激振体振动所需的功率N 1和机械损耗的功率N 2,振动锤的总
激
M r m A
∑
=02max
功率为
)(211
N N N +=η (KW) -------(12)
在非共振工况时振动阻尼所消耗的功率
221000
10
A c N C ω=
(KW) ----------(13)
轴承摩擦所消耗的功率
20003
21
d o r m N ω
μ∑= (KW) ---------(14)
。
系统,激振系统、、直线振动对定向振动,例如双轴;圆振动系统,例如单轴激振器系统、系数。对非定向振动,。
般取滚动轴承摩擦因数,一轴承外径和内径。、。轴承平均直径。振动体的振幅。偏心半径。偏心块质量。激振体的角频率。激振体的质量。传动效率。一般取5.01007.0005.0)
()(2/)()14.01.0()()()()
/()
(95
.0000110==----=------+=---=---------------------C C c ~m d D m d D d d M ~c m A m r kg m s rad kg M μμω
ωη
KW 88.2461000
)1096.4(9.2191364914.05.0233=?????=-
3
21
d o r m N ωμ∑=
选用3618轴承, d=90mm , D=190mm 14.02/)19.0090.0(1=+=d
KW 8.1472000
14
.09.2191.33006.03=?
??=
振动锤的总功率
KW N N N 41595
.08
.14788.246)(211
≈+=+=η
22
1000
2
21000
1)14.0(00
A
M A c N C C ωωω=
=
三、减振器的设计计算
减振系统主要有三种:钢质螺旋弹簧减振器、空气组合弹簧减振器(要配有空气压缩机)、橡胶减振器。 先试选用橡胶减振器
橡胶减振器工作性能平稳,结构简单和价格低廉等优点,而得到了最广泛应用,为防止工作时,消耗能量转换成热能使温度过高而影响隔振器的性能。 第一,橡胶隔振器不宜做得过大。
第二,采用易于散热的措施或选用生热较少的橡胶材料。
选用丁腈橡胶NBR ,它耐油、耐热性好,阻尼大,且与金属的粘合性也好,因为阻尼大,当工作频率通过共振区时,比较安全。橡胶减振器吸收高频振动能力强,其材料的弹性模量E 和G 比金属小得多,在工作量允许较大变形,常作动力机械和工程机械的隔振器。邵氏硬度范围H=30-70。 当H=55-70时,其弹性模量:25/10)1710(m N ~G ?= 25/10)6538(m N ~E ?=
设计时要控制硬度公差,硬度的变化范围为±3~±5时,相应的弹性模量的变化范围为±12%~±20%。具体要求请参看橡胶隔振器的设计。
已知Tv=1165KN F=1600KN M=13649kg=133760N=133.76KN 拔桩时,下橡胶减振器要最小要承受
1600-1165-133.76=301.24KN
已知激振力F=1600KN ,设计选用丁腈橡胶弹簧共24个。 单个弹簧刚度
G d
D DL K H
x -=π2 --------------(15)
m N G d D DL K H x /3582558101617
.028.014.028.0225=??-??=-=ππ
当最大振幅
m A 022.0max =时,单个橡胶弹簧能够承受的外力为
max A K F x =单承 ---------------------(16)
N A K x 78816022.03582558max =?=
振动锤工作时,施加在单个橡胶弹簧上的减振力为
N F 6666724
1016003
=?=单
N A K N <F x 7871666667max ==单
因此可知,设计的橡胶减振器符合要求。
可根据以上计算选择液压马达,进行振动锤的激振器、减振器的结构设计,并根据实际设计情况修改计算的参数。
振动信号检测系统的设计1
信号检测综合训练 说明书 题目:振动信号检测系统设计 学院:电气工程与信息工程学院 班级:电子(2)班 姓名: 钱鹏鹏 学号:11260224 指导老师:缑新科 2014.12.07
摘要 机械在运动时,由于旋转体的不平衡、负载的不均匀、结构刚度的各向异性、间隙、润滑不良、支撑松动等因素,总是伴随着各种振动。机械振动在大多情况下是有害的,振动往往会降低机器性能,破坏其正常工作,缩短使用寿命,甚至导致事故。机械振动还伴随着同频率的噪声,恶化环境,危害健康。另一方面,振动也被利用来完成有用工作,如运输、夯实、清洗、粉碎、脱水等。这时必须正确选择振动参数,充分发挥振动机械的性能。在现代企业管理制度中,除了对各种机械设备提出低振动和低噪声要求外,还需随时对机器的运行状况进行监测、分析、诊断,对工作环境进行控制。为了提高机械结构的抗振性能,有必要进行机械机构振动分析和振动设计,这些都离不开振动测试。 本文在此基础上设计了一种专用的振动信号检测系统,具有功耗低、体积小、精度高等优点。 信号检测的内容要求: 通过MCS-51系列单片机设计振动信号检测系统。要求如下: 1 振动信号的特点,选择合适的传感器,并设计相应的检测电路; 2 将设计完成的检测电路,通过软件防真验证; 3 主要设计指标:可测最大加速度:-5m/s~+5m/s;可测最大速度:-0.16m/s~+0.16m/s;可测最大位移:-5mm~+5mm;通频带:0.05Hz~35Hz;转换精度:8bit;采样频率:128Hz 4 利用LCD显示振动信号,有必要的键盘控制。
总体设计方案介绍: 本系统由发射电路和接收电路组成。发射电路主要由加速度传感器构成。接收电路由单片机最小系统和外部串口以及显示部分模块三部分组成。。 硬件电路设计: (1)使用MMA8452加速度传感器和STC89C52单片机来实现。 一.设计目的:了解加速度传感器的工作机理,以及单片机的各种性能; 二.设计器材:电源、proteus7.7软件、89C52,MMA8452加速度传感器,导线若干。 三.设计方案介:该系统目的是便于对一些物理量进行监视、控制。本设计以加速度传感器显示出加速度信号即振动信号,再通过单片机将信号从串口接入电脑显示出来,即完成振动信号的检测功能。 (2)振动传感器的分类 1、相对式电动传感器 电动式传感器基于电磁感应原理,即当运动的导体在固定的磁场里切割磁力线时,导体两端就感生出电动势,因此利用这一原理而生产的传感器称为电动式传感器。 相对式电动传感器从机械接收原理来说,是一个位移传感器,由于在机电变换原理中应用的是电磁感应电律,其产生的电动势同被测振动速度成正比,所以它实际上是一个速度传感器。 2、电涡流式传感器 电涡流传感器是一种相对式非接触式传感器,它是通过传感器端部与被测物体之间的距离变化来测量物体的振动位移或幅值的。电涡流传感器具有频率范围宽(0~10 kHZ),线性工作范围大、灵敏度高以及非接触式测量等优点,主要应用于静位移的测量、振动位移的测量、旋转机械中监测转轴的振动测量。 3、电感式传感器 依据传感器的相对式机械接收原理,电感式传感器能把被测的机械振动参数的变化转换成为电参量信号的变化。因此,电感传感器有二种形式,一是可变间隙,二是可变导磁面积。 4、电容式传感器 电容式传感器一般分为两种类型。即可变间隙式和可变公共面积式。可变间隙式可以测量直线振动的位移。可变面积式可以测量扭转振动的角位移。 5、惯性式电动传感器 惯性式电动传感器由固定部分、可动部分以及支承弹簧部分所组成。为了使传感器工作在位移传感器状态,其可动部分的质量应该足够的大,而支承弹簧的刚度应该足够的小,也就是让传感器具有足够低的固有频率。根据电磁感应定律,感应电动势为:u=Blx&r 。式中B为磁通密度,l为线圈在磁场内的有效长度,r x&为线圈在磁场中的相对速度。 从传感器的结构上来说,惯性式电动传感器是一个位移传感器。然而由于其输出的电信号是由电磁感应产生,根据电磁感应电律,当线圈在磁场中作相对运动
振动锤工作原理
振动锤工作原理 振动锤是利用共振理论设计的。当桩的强迫振动频率与土壤颗粒的振频率一致时,土壤颗粒产生共振,此时,土壤颗粒有最大的振幅,足够的振动速度和加速度能迅速破坏桩和土壤间的粘合力,使桩身与土壤从压紧状态过渡到瞬间分离状态,沉桩阻力尤其侧面阻力迅速减小,桩在自重作用下下沉。由于振动锤靠减小桩与土壤间的摩擦力达到沉桩的目的,所以在桩和土壤间的摩擦力减小的情况下,可以用稍大于桩和桩身的力即可将桩拔起。因此,振动锤不仅适合于沉桩,而且适合于拔桩。沉桩、拔桩效率都很高。 主要参数:振幅A、激振频率ω、偏心力矩M,激震力F、参振重量Q、功率N 1.振动功率N的确定。振动功率N的计算公式为:N=K·M·n/9550 (kw)公式中,n为转速;K=1.25。 2.偏心力矩M的确定。振动锤偏心力矩越大克服硬质土层的能力越强,当已知振幅和参振总重量Q(桩体重量和振动锤重量)时,可以算出偏心力矩:M=Q·A (N·m) 3.激振频率ω的确定。振动锤的激振频率与振动系统的固有频率密切相关,当激振频率接近振动系统的固有频率时,振动沉桩达到最大效果。而振动系统的固有频率不仅和振动锤参数有关,还与土壤的参数有关,不同地层土壤的自振频率有着很大的差别。下面表格是根据经验得到的不同地层振动锤最佳频率范围。试验证明,其他参数一定的情况下,增大振动频率可以使得饱和沙土的液化加速,土壤阻力相应的快速减少,比起提高振幅更能有效提高桩的运动加速度,从而使沉桩效率得以显著提高,但激振频率提高过高会引起输出功率过大,所以确定激振频率时还应综合考虑。 激振频率参考 地层类型最佳频率ω/s 含饱和水的砂土100-200 塑性粘土及含砂粘土90-100 坚实粘土70-75 含砾石粘土60-70 含砂的砾石土50-60 4.参振重量Q的确定。振动锤除了要有必要的振幅和加速度,还必须有一定的参振重量以克服沉桩时的阻力,桩在土中的静阻力R与土层的贯入标准值N和截面积S之间的关系为: R=4N·S (KN) 因此,桩在受到振动而使摩擦力显著降低时,桩就可以被沉入到与参振重量相等的桩端阻力处,即Q=4N·S 5.激振力F的确定。激振力F是反映振动锤综合能力的参数,激振力F必须大于桩与土壤之间的静摩擦力f,在沉桩过程中会在激振力作用下急剧下降。有振动
压路机论文:压路机概念设计
压路机论文:压路机概念设计 摘要本文通过几个概念设计草图的方案,简单讲述了压路机的概念设计。 关键词压路机;概念;设计;创新;思维 1压路机概念设计草图方案 草图方案1:豪华版压路机 这是本人绘制的第一张草图。在最初设计这款压路机的时候,我的想法是打破传统的设计理念给人一种高贵的感觉。在造型和内饰以及功能上都做了较大改进,这是一款有着轿车感觉可以当轿车使用,有着跑车造型却可以做压路机的产品。前面的顶棚可以放下来,顶部和后部均装有射像头,保证司机可以全方位的清晰了解整车的工况和车辆周围的 情况。在非工作场地可以将前盖放下,前面的橡胶轮胎可以提升到地面以上,完全当轿车一样行驶,快速实现压路机的转场。当然,豪华的内饰和先进的控制技术是必不可少的,这款压路机标配遥控器,在工况恶劣不宜人工驾驶时,工作者可以用手柄将其控制自如。 草图方案1 草图方案2:休闲版的压路机 这款压路机较前款有相似之处又有所不同,相似的是同为概念车,都是对未来压路机设计的一种表达形式。同样的功能、相似的设计理念以及很多材质都是相同的。这款压路
机简单看草绘图的话,或许你会以为这是款玩具车。它在设计上以圆为设计主体,圆形的驾驶室、圆形的车轮、圆形的车灯以及与车体相结合处的弧线有力的结合成为一个整体,组成了这款休闲版的压路机。当然这款压路机整机结构紧凑,采用低重心设计,整车稳定性好。顶部和左右两侧的车门均采用透明材质,通体明亮、视野开阔,驾驶员的从座位上很容易看到钢轮边缘,提高了作业的准确度,并适于坡道压实。 草图方案3:自由版压路机 这款压路机设计思想来源于“乌龟”,乌龟笨笨的躯体、笨拙的步伐,但却有与兔子赛跑的决心与胆识,最后凭借其不泄的毅力战胜了兔子。这款压路机从设计上来说不像前两款看着那么灵活,但旨在说明其内在意义,希望它能带给人们一种毅力坚强、坚持不懈的理念。这款压路机整体采用流线型,大弧度的驾驶室,半圆的车窗以及凹进的车轮与圆形钢轮浑然成为一个整体,整体造型力争给人一种塌实、稳重的 感觉。 草图方案4:实用型压路机 这款压路机,本人把它定义为实用性压路机是因为它比较接近实际,属于现有压路机的一款升级产品,包含了现有压路机的全部功能,且依现现有的技术完全可以实现其外观
YZ20D型振动压路机总体设计
YZ20D型振动压路机总体设计 摘要 振动压路机是一种高效的压实机械,广泛应用于道路建设施工中。目前国产振动压路机以中小吨位和机械传动方式为主,而性能优良的全液压重型振动压路机主要依赖于进口。为彻底改变这种现状,必须研制和生产具有自主知识产权的高性能重型振动压路机。 本文本论文简述了国内外压实设备和压实技术的发展概况、振动压实的原理、振动轮的结构和工作原理、振动压路机的压实特性与压实效果,动力学特性和振动压实机理进行了研究与分析,建立了振动轮的数学模型,明确了振幅、加速度、激振力、对地面作用力与振动频率之间的动态响应关系,以此作为参数的设计依据,计算出了 YZ20D振动压路机的整机工作质量、振动频率、振幅、激振力、发动机功率等压路机压实作业中重要的振动性能参数及振动轮等关键技术结构进行研究及确定,最大功率。 本文在理论分析和计算的基础上,完成了 YZ20D全液振动压路机传动系统设计、振动轮总成等主要部件的设计。 关键词: 振动压路机;总体参数;功率计算;爬坡校核;液压系统
Abstract Vibratory roller is a kind of highly efficient compaction machine which is widely used in the road construction. Most of domestic vibratory rollers adopting mechanical transmission are light or medium size at present, while full hydraulic and heavy vibratory rollers with high performance are mainly depended on importation. To change the actuality completely, the heavy vibratory rollers with high performance an our own intellectual property rights must be developed and manufactured. The general development of road rollers is stated in this paper. The theories of vibratory compacting and the configuration and work theory of vibratory wheel and the compact characteristic and effect of vibratory road roller are introduced.In this paper the physical property, dynamic characteristics and vibration compaction mechanism of soil are studied and a mathematical model of vibratory rollers is created. The dynamic responses between the amplitude, acceleration, exciting force, acting force on the ground and vibration frequency are determined, and according to which, frequency, amplitude and mass are designed.Determine the important vibratory performance specifications for the compaction operation of roller,such as the operating mass,vibratory frequency,amplitude,centrifugal force,power of engine and so on. Based on theoretical analysis and calculation, the overall design of model YZ20D vibratory roller and the main part design of hydraulic system,roller and vibration damping system have been complished. Key Words: Vibratory roller;the overall parameters;Grade ability check ;shock absorbers;Hydraulic system
振动锤施工方案
高频液压振动锤灌注桩使用方案 高淳县玉泉广场地下停车库项目工程位于高淳老街及固城湖附 近,地表及以下5至7米左右均为建筑垃圾和生活垃圾回填。 该项目为地下两层地下室,基坑开挖深度为8米左右,基坑四周均为道路,地下水位较高。针对该项目支护结构施工,我单位采 用了履带式旋挖成孔灌注桩和水钻孔灌注桩,均出现严重塌孔现象 (水钻孔施工至8米处时,无进尺,经研究及观察发现,为上部建 筑垃圾塌方,导致钻进无法正常施工),导致相邻支护桩和三轴深搅 桩止水帷幕的施工无法进行,而该项目的重点及难点为支护桩及止 水帷幕的施工,鉴于上述的情况,我方建议甲方增加相应费用,采 用全护筒形式且桩直径增加20厘米以确保设计桩径,确保该项目能 在质量及安全的情况下顺利完成。 APE200T高频液压振动锤沉拔桩特性简介
200T液压振动锤主要性能特点: 1)液压振动锤的优点: 一、斜向直齿齿轮使传动列平稳; 二、系统采用开式油路,故障率底; 三、采用箱底体精铣油路槽代易受损的液压软管,安全可靠; 四、减震箱可根据工程要求调节高度和重量; 五、采用不同夹具适用于多种打拔桩作业; 六、满足水下,水上和陆地施工要求。 2)与传统的撞击式打桩工法相比,高频液压振动式桩有着明显的 优势: 、高产量施工能力,施工速度在有利条件下比撞击式打桩工法 快达6 倍。 二、免除撞击桩的噪音。 三、对不同桩径作出快速调整,不受桩长的限制。 四、打桩和拔桩用同一套设备,不需做任何改变。 五、仅需吊机配合使用,操作容易,对吊机不会产生任何副作用。 六、做混凝土灌注桩时,同一套钢护筒能重复使用节省成本。 3)高频振动式打桩工法放入原理: 振动式打桩工法的原理为:振动锤连带桩体的高速成垂直振动使用权桩壁周围的土壤产生液化效果,从而减少桩壁的擦阻力。振动力加上锤身和桩体的重量,使桩能穿越土层到达设计位置。当振动停止时、桩的阻力恢复到原本静止状态。功率高,振动沉拔桩速度一般为 4-7m/min,最快达12m/min (在非淤泥质土壤中)施工速度大大快于其
压路机结构和工作原理
项目一压路机构造与装配 (2) 任务一认识压路机 (2) 1.压路机的用途 (2) 2.公路的结构 (2) 3. 压路机的分类 (2) 4. 压路机的型号编著 (3) 5.振动式压路机的应用 (3)
项目一压路机构造与装配 任务一认识压路机 一、任务描述 二、任务要求 三、相关知识 (一)压路机的用途、分类与型号编制 1.压路机的用途 在公路、铁路、机场、水利工程、建筑工程中,压路机主要用于对路基、路面、大堤、围堰、建筑基础等进行压实。 所谓压实,就是通过碾压、冲击等方法,以外力克服土壤、砂石、沥青混合料的颗粒之间的摩擦力、凝聚力进行重新排列,互相之间靠拢、将水与空气挤出,使材料颗粒之间的摩擦力、凝聚力变得更大,被压实材料也就更密实。 压实经过了四个过程:重新排列、充填过程、分离过程与夯实过程。即较大的颗粒重新排列,使它们之间的间隙变小,小颗粒充填到大颗粒这间的间隙中,将间隙中的水与空气挤出,在外力的作用下颗粒碎裂,造成进一步的充填。 造成压实的作用力有以下几种:静压力、冲击力、激振力、振荡力与搓揉力。能产生以上几种力进行压实工作的机器就是压路机。 2.公路的结构 公路分二层:路面层与路基层。 路基层有二种:一种是未经挖动的土层,这种不需要进行压实;另一种是填起来的土层,必须进行分层压实。 路面层分为面层、基层与垫层,均需要进行压实。其中各层的材料与厚度各不相同,有沥青混凝土、水泥混凝土、稳定土、级配沙石、泥结沙石等。对于不同的层面、不同的材料就采用不同的压实方法,采用不同的压实机械。 3.压路机的分类 1 按压实原理分:静作用式、振动式、振荡式。 3按碾压轮的形式分:光钢轮、振动轮、羊脚轮。 4按机架分:整体机架、铰接机架。 5按碾压轮数量分:单轮、双轮、叁轮。
振动压路机工作参数分析
振动压路机工作参数分析 摘要:随着我国公路交通事业的蓬勃的发展,机械化设备在工程建设中发挥着越来越重要的作用。振动压路机作为机械设备之一,加强其维护和保养工作,正确处理使用过程中出现的问题,有利于更好地提高工作效率,为确保工程建设顺利进行提供保障。文章主要结合自己多年的实践经验,对振动压路机工作参数进行探讨。 关键词:振动压路机;工作参数;分析 现代公路工程施工中,压路机是必不可少的工程机械,无论是路基、基层还是面层的压实,都离不开压路机,振动压路机作为现在公路施工中的主要压实设备之一,振动压路机一般分为单钢轮振动压路机和双钢轮振动压路机,单钢轮振动压路机主要适用于土基、砂石以及基层等的碾压,而双钢轮振动压路机主要用于沥青层的碾压,振动压路机在公路、市政、矿山、堤坝以及其他工业场地等领域施工中应用非常广泛。 压实即利用外界压力提升压实材料密实度的过程,公路施工压实即通过外力加载压实材料,克服材料中的摩擦力与粘着力,将其中水分和空气排除,减小颗粒孔隙比,提升土体重量与密度的一种方式,采取该种措施能够让材料颗粒形成密实整体,提升材料与基土之间的稳定性与不透水性,继而满足公路的承载力需求。 振动压路机是公路压实中的常用设备,该种设备一般都设置了振幅装置与调频装置,可以起到理想的压实效果,其工作情况能够根据压实需求进行调节,设置成为重型压路机、中型压路机与轻型压路机,与其他类型的压路机相比而言,该种设备的经济性理想,已经在施工中得到了广泛的使用,下面就针对振动压路机工作参数的优化进行分析。 1振动压路机工作参数分析 在将振动压路机应用在施工过程中时,其振动作用会对路面出现往复性的冲击,在该种冲击因素的影响下,静止的材料会变成运动状态,材料与材料间的摩擦阻力也越来越小,颗粒的联系更加紧密,这样即可有效提升路面承载力。材料压实度与材料性能和振动压路机技术参数两个因素密切相关,在这两项因素中,振动压路机技术参数包括频率、碾压速度、振幅、静质量、振动轮直径、振动轮宽度、振动轮数量、静线荷载,除了这几项因素,还要考虑到碾压遍数与碾压速度。 1.1 静质量和静线荷载 在开展压实工作时,振动压路机需要应用到自身的静线荷载与静质量因素,在工作状态下,振频率会带动颗粒振动,让颗粒实现重新排列,继而提升材料密实度。施工实践表明,振动压路机的压实能量主要由振动轮来决定,振动轮质量与压路机压实深度是一种正比关系。 1.2 振动频率 振动频率是振动压路机一分钟的转动次数,振动频率对于压实质量有着重要的影响,为了保障压实能量,需要将振动压路机频率设置为与压实材料自然共振频率一致,若频率过低,就会导致机器出现避震块共振的情况,致使零件出现损坏;若振动过高,就会影响压实结果的可靠性,并令地面受到过度碾压或者严重冲击,出现压实不平的情况。 1.3 振动轮数与驱动形式
压路机结构和工作原理
项目一压路机构造与装配...................................... 错误!未定义书签。 任务一认识压路机........................................ 错误!未定义书签。 1.压路机的用途 .............................................. 错误!未定义书签。 2.公路的结构 ................................................ 错误!未定义书签。 3. 压路机的分类 ............................................. 错误!未定义书签。 4. 压路机的型号编着 ......................................... 错误!未定义书签。 5.振动式压路机的应用 ........................................ 错误!未定义书签。
项目一压路机构造与装配 任务一认识压路机 一、任务描述 二、任务要求 三、相关知识 (一)压路机的用途、分类与型号编制 1.压路机的用途 在公路、铁路、机场、水利工程、建筑工程中,压路机主要用于对路基、路面、大堤、围堰、建筑基础等进行压实。 所谓压实,就是通过碾压、冲击等方法,以外力克服土壤、砂石、沥青混合料的颗粒之间的摩擦力、凝聚力进行重新排列,互相之间靠拢、将水与空气挤出,使材料颗粒之间的摩擦力、凝聚力变得更大,被压实材料也就更密实。 压实经过了四个过程:重新排列、充填过程、分离过程与夯实过程。即较大的颗粒重新排列,使它们之间的间隙变小,小颗粒充填到大颗粒这间的间隙中,将间隙中的水与空气挤出,在外力的作用下颗粒碎裂,造成进一步的充填。 造成压实的作用力有以下几种:静压力、冲击力、激振力、振荡力与搓揉力。能产生以上几种力进行压实工作的机器就是压路机。 2.公路的结构 公路分二层:路面层与路基层。 路基层有二种:一种是未经挖动的土层,这种不需要进行压实;另一种是填起来的土层,必须进行分层压实。 路面层分为面层、基层与垫层,均需要进行压实。其中各层的材料与厚度各不相同,有沥青混凝土、水泥混凝土、稳定土、级配沙石、泥结沙石等。对于不同的层面、不同的材料就采用不同的压实方法,采用不同的压实机械。 3.压路机的分类 1 按压实原理分:静作用式、振动式、振荡式。 2按结构质量分:轻型、小型、中型、重型、超重型。 3按碾压轮的形式分:光钢轮、振动轮、羊脚轮。 4按机架分:整体机架、铰接机架。 5按碾压轮数量分:单轮、双轮、叁轮。
振动压路机设计
手扶压路机毕业设计 作者: XX 指导老师:XXX 2014年5月8日 手扶压路机设计 的压实机理研究 作者:XXX 指导老师:XXX (长安大学交通建设与装备学号:2506080108 陕西西安)
摘要:压力原理上,探讨了土中含水量,压路机的震动压实功能与土的级配组 成对压实效果的影响。且进一步对振动压实原理做研究,振动压实类型及振动压 路机的力学模型进行了研究。分析了振动对压实材料剪应力、抗剪强度的影响, 结合各个因素来考虑设计手扶压路机结构,简要提出了对振动压路机参数的选择 和提高压实效率的途径。 关键词:手扶压路机振动压路机 Abstract: On the analysis of soil properties and and soil compaction performance, discusses on the basis of the soil moisture content, roller compaction function and soil graded composition on compaction effect. And further, the vibration compaction mechanism of vibration compaction type and mechanics model of vibratory rollers are studied. Analysis of the vibration compaction material shear stress, shear strength with the influence of the structure of vibratory roller, analyzed its mechanical properties, briefly proposed to the vibratory rollers parameter selection and improve the efficiency of the way compaction. 目录 第一章概述 (4) 1.1 选题目的与意义 (4) 1.2 设计题目及参数要求 (4)
振动测试技术方案设计
振动测试技术案 采用加速度计作为振动传感器,在各种工况下,对被测系统多个测点的加速度信号进行测量,通过FFT频谱分析,得到结构的固有频率,描述系统的振动特性。 却迪哎怯嗟惟悟号追辿蟹數赛紫蚩胖讣竿机 图1振动测试硬件流程图 、传感器指标分析 最常用的振动测量传感器按各自的工作原理可分为压电式、压阻式、电容式、电感式以及光电式。压电式加速度传感器因为具有测量频率围宽、量程大、体积小、重量轻、对被测件的影响小以及安装使用便,所以成为最常用的振动测量传感器。在一般通用振动测量时,用户主要关心的是加速度计传感器的技术指标,包括灵敏度、带宽、量程、分辨率、输出电气特性等。 (1)灵敏度 传感器的灵敏度是传感器的最基本指标之一,灵敏度的大小直接影响到传感器对振动信号的测量。不难理解,传感器的灵敏度应根据被测振动量(加速度值)大小而定,但由于加速度传感器是测量振动的加速度值,而在相同的位移幅值条件下加速度值与信号的频率平成正比,所以不同频段的加速度信号大小相差甚大。选择加速度传感器灵敏度时应对信号有充分的估计,最常用的振动测量压电式加速度计
灵敏度,电压输出型(IEPE型)为50?100 mV/g,电荷输出型为 1 ?50 PC/g。 (2)带宽 传感器的带宽是指传感器在规定的频率响应幅值误差( 士5%, 士10%, 士3dB)传感器所能测量的频率围。频率围的高,低限分别称为高、低频截止频率。截止频率与误差直接相关,所允的误差围大则其频率围也就宽。作为一般原则,传感器的高频响应取决于传感器的机械特性,而低频响应则由传感器和后继电路的综合电气参数所决定。高频截止频率高的传感器必然是体积小,重量轻,反之用于低频测量的高灵敏度传感器相对来说则一定体积大和重量重。 (3)量程 加速度传感器的测量量程是指传感器在一定的非线性误差围所能测量的最大测量值。通用型压电加速度传感器的非线性误差大多为1%。作为一般原则,灵敏度越高其测量围越小,反之灵敏度越小则测量围越大。IEPE(电压)输出型压电加速度传感器的测量围是由在线性误差围所允的最大输出信号电压所决定,最大输出电压量值一般 都为士5V。通过换算就可得到传感器的最大量程,即等于最大输出电压与灵敏度的比值。需要指出的是IEPE压电传感器的量程除受非线性误差大小影响外,还受到供电电压和传感器偏置电压的制约。当 供电电压与偏置电压的差值小于传感器技术指标给出的量程电压时,传感器的最大输出信号就会发生畸变。因此IEPE型加速度传感器的偏置电压稳定与否不仅影响到低频测量也可能会使信号失真,这种现 象在高低温测量时需要特别注意,当传感器的置电路在非室温条件下不稳定时,传感器的偏置电压很可能不断缓慢地漂移而造成测量信号忽大忽小。 (4)分辨率 即能测量到的最小加速度变化量。加速度传感器的分辨率受其噪声的限制,输出噪声的大小随频带宽度而变化。 (5)输出电气特性
大直径钢护筒振动锤选型及应用
大直径钢护筒振动锤选型及应用 [摘要]:诸永高速温州段延伸工程第二合同段主桥桩基础采用φ2.8m的钻孔桩。钢护筒直径为3.1m,长度为36m。结合工程实例,重点介绍钢护筒的设计加工、振动锤的选型及钢护筒定位下沉技术。 [关健词]:大直径桩钢护筒振动锤定位 1、工程概况 诸永高速公路温州段第2合同路线起点位于瓯江大桥后江段与瓯江段交叉墩处(第38号墩),路线全长3584.205km。主桥桥跨布置为(84+200+84)m=368m,主墩处主梁梁高设置为9m,跨中梁高为3.5m,采用三孔一联的钢混组合连续刚构桥,为降低主梁梁高,在主跨跨中设置80m长钢箱梁。 90#、91#主墩分别采用12根φ2.8m的钻孔灌注桩,按嵌岩桩设计,桩长分别为88m和94m。桥址位于楠溪江河口下游约1.5km的瓯江干流上,本河段为感潮河段(瓯江感潮河段总长78km),潮水属不规则半日型潮,最高潮位5.44m,最低潮位-2.43m,平均高潮位2.52m。 2、钢护筒设计 2.1钢护筒作用 钢护筒是钢板卷制而成的圆形桶状结构物,主要作用有以下几点: 保护孔口,防止孔口范围内土层坍塌; 确定桩(孔)位,作为钻孔的导向; 隔离地表水免其流入孔内,并保持钻孔内水位(泥浆)高出地下水或施工水位一定高度,形成静水压力(水头),以保持孔壁稳定; 深水护筒还可作为浇注混凝土成桩的水中模板; 永久性钢护筒还可以作为钻孔桩防腐蚀的屏障。在适当条件下,还可以作为桩结构的一部分参于受力。 2.2钢护筒设计 本项目桩基钢护筒设计为永久性钢护筒,参于受力。以91#主墩为例,钢护筒设计底标高-28.87m,护筒顶标高取7.13m,钢护筒总长度36m,外径3.1m,壁厚2cm,单根重量54.662吨。
振动压路机振动轮设计说明书
目录 第1章绪论..................................... - 1 - 1.1 国内外压路机产品技术概述与发展趋势.................................................................................. - 1 - 1.2本设计研究内容........................................................................................................................... - 2 - 第2章总体方案设计............................... - 3 - 2.1. 整机方案拟定............................................................................................................................. - 3 - 2.1.1 规格系列........................................................................................................................... - 3 - 2.1.2行驶方式......................................................................................................................... - 3 - 2.1.3行走驱动系统................................................................................................................. - 3 - 2.1.4 车架形式........................................................................................................................... - 4 - 2.1.5 转向方式........................................................................................................................... - 4 - 2.1.6 振动轮总成....................................................................................................................... - 4 - 2.1.7 减振方式........................................................................................................................... - 5 - 2.2基本技术参数的拟定................................................................................................................ - 6 - 2.2.1 名义振幅........................................................................................................................... - 6 - 2.2.2. 工作频率.......................................................................................................................... - 6 - 2.2.3 YZC3振动压路机拟达到的主要技术参数..................................................................... - 7 - 第3章整体参数计算.............................. - 8 - 3.1 六个基本参数计算...................................................................................................................... - 8 - 3.2爬坡能力的确定........................................................................................................................... - 9 - 3.3 转弯半径计算.............................................................................................................................. - 9 - 3.4 重心位置 ..................................................................................................................................... - 9 - 3.5 整机稳定性分析.......................................................................................................................... - 9 - 3.6减振系统设计与计算................................................................................................................. - 18 - 3.7 振动参数的设计计算................................................................................................................ - 19 - 第4章YZC3型振动压路机传动系统设计............. - 21 - 4.1 传动形式的确定........................................................................................................................ - 21 - 4.2 液压行走系统设计.................................................................................................................... - 22 - 4.3 液压振动系统设计.................................................................................................................... - 26 - 4.4 液压转向系统设计.................................................................................................................... - 29 - 4.5整机功率及发动机选型............................................................................................................ - 32 - 第5章总结.................................... - 33 - 5.1本设计的特点.......................................................................................................................... - 33 - 5.2本设计的不足及努力方向...................................................................................................... - 33 - 参考文献......................................... - 35 -
微振动测试仪设计说明
目录 1概述 (1) 2系统硬件电路设计 (5) 2.1压电瓷传感器的等效电路 (5) 2.2 电荷放大电路 (6) 2.3 测量电路 (8) 2.4 振动测量 (10) 3 总结 (13) 参考资料 (14)
1概述 振动测试仪是一种能测量机械、物体等振动的测量仪器。比如测振仪、动平衡仪、振动测试与模态分析仪都算是振动测试仪。 振动是自然界、工程技术和日常生活中普遍存在的物理现象。各种机器、仪器和设备运行时,不可避免地存在着诸如回转件的不平衡、负载的不均匀、结构刚度的各向异性、润滑状况的不良及间隙等原因而引起受力的变动、碰撞和冲击,以及由于使用、运输和外界环境下能量传递、存储和释放都会诱发或激励机械振动。所以说,任何一台运行着的机器、仪器和设备都存在着振动现象。 在大多数情况下,机械振动是有害的。振动往往会破坏机器的正常工作和原有性能,振动的动载荷使机器加速失效、缩短使用寿命甚至导致损坏造成事故。机械振动还直接或间接地产生噪声,恶化环境和劳动条件,危害人类的健康。因此,要采取适当的措施使机器振动在限定围之,以避免危害人类和其他结构。 随着现代工业技术的发展,除了对各种机械设备提出了低振级和低噪声的要求外,还应随时对生产过程或设备进行监测、诊断,对工作环境进行控制,这些都离不开振动测量。为了提高机械结构的抗振性能,有必要进行机械结构的振动分析和振动设计,找出其薄弱环节,改善其抗振性能。另外,对于许多承受复杂载荷或本身性质复杂的机械结构的动力学模型及其动力学参数,如阻尼系数、固有频率和边界条件等,目前尚无法用理论公式正确计算,振动试验和测量便是唯一的求解方法。因此,振动测试在工程技术中起着十分重要的作用。 微振动测试仪的设计主要组成部分压电式传感器,用于信息的采集;在本设计方案里选择压电瓷传感器做为压电式传感器。通过电路连接把所采集的信息传递给电荷放大器,对微弱的电荷信号进行放大,信号的放大通常有两种:电压放大和电荷放大。这里考虑避免接入电容的影响,
振动锤选型计算书
附件1 柬埔寨Stueng Trang-Kouch Chhmar 湄公河大桥工程 振动锤选型计算书 1 计算依据 a 《建筑桩基技术规范》(JGJ94-2008) b 《港口工程荷载规范》(JTS 144-1-2010) c 《港口工程桩基规范》(JTJ254-99) 2计算内容 2、1设备选型 2、2振动锤沉桩可行性验算 2、3振沉深度计算 2、1设备选型 现初步拟定主墩钢护筒参数如下: 现选取180KW型振动锤,技术参数如下:
所选振动锤需满足以下三个基本条件,方可沉桩成功: 1、振动锤得激振力F max 大于被振构件与土得动侧摩阻力Q st ; 2、振动系统得工作振幅A大于振沉到要求深度所需得最小振幅; 3、振动系统得总质量Q 大于振沉构件得动端阻力R。 2、2振动锤沉桩可行性验算 2、2、1激振力验算 根据日本经验公式,振动锤沉桩所需满足得条件如下: F max≥Q st=μQ s μ=μmin+(1-μmin)e-βη 式中η为振动加速度比 根据经验推荐:砂质土:μmin=0、15,淤泥质黏土:μmin=0、06,黏土:μmin=0、13,钢材得β值为0、52。 根据DZJ180型振动锤技术参数,可计算 μ=μmin+(1-μmin)e-βη=0、1508 按照15#墩最长钢护筒计算动侧摩阻力值为 则Q st=0、1508*3、14*2、3*(35*2、4+40*12、7+45*6、7+50*2、89)=1130、46KN<F max=1240KN 结论:180KW振动锤激振力满足振动沉桩要求。 2、2、2振幅验算 当激振器振幅很小时,沉入并不发生,只有当振幅超过某一定值时,才可实现沉桩,这一A0称为起始振幅。在水下得砂质土壤中,起始振幅达到2mm可以实现振沉。 工作振幅A=偏心力矩/振动质量 =1500*103/53、174*104=2、82mm>A0=2mm 结论:180KW振动锤工作振幅满足振动沉桩要求。 2、2、3动端阻力验算 振动锤系统得总重量Q0需大于振沉构件得动端阻力R