Matlab-Simulink基础教程

Matlab Simulink 仿真步骤
MATLAB基础与应用简明教程 张明等编著 北京航空航天大学出版社(2001.01) MATLAB软件环境是美国New Mexico大学的Cleve Moler博士首创的,全名为MATrix LABoratory(矩阵实验室)。它建立在20世纪七八十年代流行的LINPACK(线性代数计算)和ESPACK(特征值计算)软件包的基础上。LINPACK和ESPACK软件包是从Fortran语言开始编写的,后来改写为C语言,改造过程中较为复杂,使用不便。MA TLAB是随着Windows环境的发展而迅速发展起来的。它充分利用了Windows环境下的交互性、多任务功能语言,使得矩阵计算、数值运算变得极为简单。MA TLAB语言是一种更为抽象的高级计算机语言,既有与C语言等同的一面,又更为接近人的抽象思维,便于学习和编程。同时,它具有很好的开放性,用户可以根据自己的需求,利用MA TLAB提供的基本工具,灵活地编制和开发自己的程序,开创新的应用。 本书重点介绍了MA TLAB的矩阵运算、符号运算、图形功能、控制系统分析与设计、SimuLink仿真等方面的内容。 Chap1 MATLAB入门与基本运算 本章介绍MATLAB的基本概念,包括工作空间;目录、路径和文件的管理方式;帮助和例题演示功能等。重点介绍矩阵、数组和函数的运算规则、命令形式,并列举了可能得到的结果。由于MA TLAB的符号工具箱是一个重要分支,其强大的运算功能在科技领域有特殊的帮助作用。 1.1 MATLAB环境与文件管理 1.2 工作空间与变量管理 1.2.1 建立数据 x1=[0.2 1.11 3]; y1=[1 2 3;4 5 6]建立一维数组x1和二维矩阵y1。分号“;”表示不显示定义的数据。 MATLAB还提供了一些简洁方式,能有规律地产生数组: xx=1:10 %xx从1到10,间隔为1 xx=-2:0.5:1 %xx从-2到1,间隔为0.5 linespace命令等距离产生数组,logspace在对数空间中等距离产生数组。对于这一类命令,只要给出数组的两端数据和维数就可以了。 xx=linespace(d1,d2,n) %表示xx从d1到d2等距离取n个点 xx=logspace(d1,d2,n) %表明xx从10d1到10d2等距离取n个点 1.2.2 who和whos命令 who: 查看工作空间中有哪些变量名 whos: 了解这些变量的具体细节 1.2.3 exist命令 查询当前的工作空间内是否存在一个变量,可以调用exist()函数来完成。 调用格式:i=exist(…A?); 式中,A为要查询的变量名。返回的值i表示A存在的形式: i=1 表示当前工作空间内存在一个变量名为A的矩阵; i=2 表示存在一个名为A.m的文件; i=3 表示MATLAB的工作路径下存在一个名为A.mex的文件;
matlabsimulink初级教程
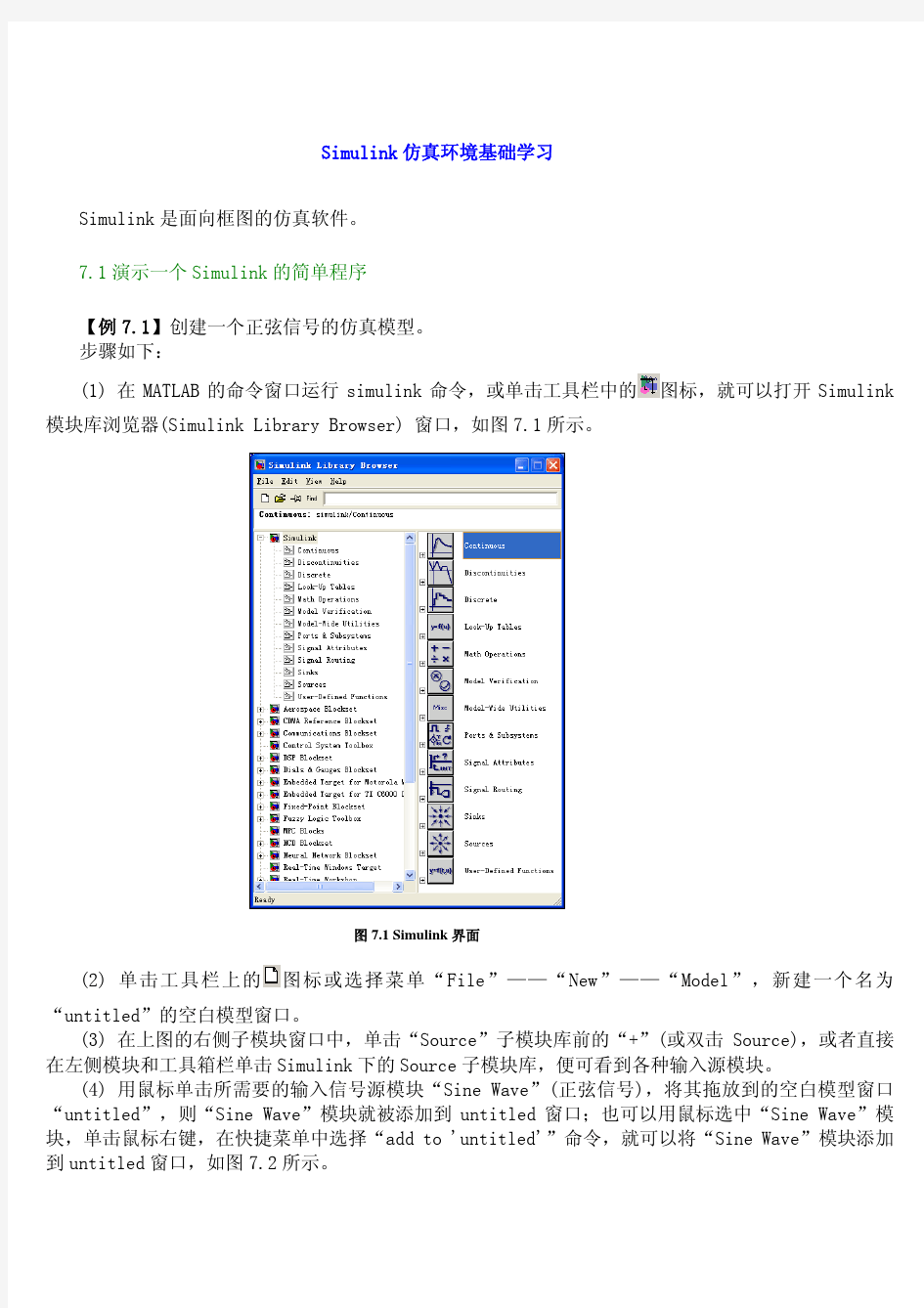
S i m u l i n k仿真环境基础学习Simulink是面向框图的仿真软件。 7.1演示一个Simulink的简单程序 【例7.1】创建一个正弦信号的仿真模型。 步骤如下: (1)在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(SimulinkLibraryBrowser)窗口,如图7.1所示。
图7.1Simulink界面 (2)单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。 (3)在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。 (4)用鼠标单击所需要的输入信号源模块“SineWave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“SineWave”模块就被添加到untitled窗口;也可以用鼠标选中“SineWave”模块,单击鼠标右键,在快捷菜单中选择“addto'untitled'”命令,就可以将“SineWave”模块添加到untitled窗口,如图7.2所示。
(5) Scope ”模块(示波器)拖放到“untitled ”窗口中。 (6)在“untitled ”窗口中,用鼠标指向“SineWave ”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope ”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。如图7.3所示。 (7)开始仿真,单击“untitled ”模型窗口中“开始仿真”图标 ,或者选择菜单“Simulink ”——“Start ”,则仿真开始。双击“Scope ” 模块出现示波器显示屏,可以看到黄色的正弦波形。如图7.4所示。 图7.2Simulink 界面
Matlab Simulink中异步电机模型说明文档
Description The Asynchronous Machine block operates in either generator or motor mode. The mode of operation is dictated by the sign of the mechanical torque: Mechanical System s ls
Preset model Provides a set of predetermined electrical and mechanical parameters for various asynchronous machine ratings of power (HP), phase-to-phase voltage (V), frequency (Hz), and rated speed (rpm). Select one of the preset models to load the corresponding electrical and mechanical parameters in the entries of the dialog box. Note that the preset models do not include predetermined saturation parameters. Select No if you do not want to use a preset model, or if you want to modify some of the parameters of a preset model, as described below. When you select a preset model, the electrical and mechanical parameters in the Parameters tab of the dialog box become unmodifiable (grayed out). To start from a given preset model and then modify machine parameters, you have to do the following: Select the desired preset model to initialize the parameters. 1. 2. Change the Preset model parameter value to No. This will not change the machine parameters. By doing so, you just break the connection with the particular preset model. 3. Modify the machine parameters as you wish, then click Apply. Mechanical input Allows you to select either the torque applied to the shaft or the rotor speed as the Simulink signal applied to the block's input. Select Torque Tm to specify a torque input, in N.m or in pu, and change labeling of the block's input to Tm. The machine speed is determined by the machine Inertia J (or inertia constant H for the pu machine) and by the difference between the applied mechanical torque Tm and the internal electromagnetic torque Te. The sign convention for the mechanical torque is the following: when the speed is positive, a positive torque signal indicates motor mode and a negative signal indicates generator mode. Select Speed w to specify a speed input, in rad/s or in pu, and change labeling of the block's input to w. The machine speed is imposed and the mechanical part of the model (Inertia J) is ignored. Using the speed as the mechanical input allows modeling a mechanical coupling between two machines and interfacing with SimMechanics? and SimDriveline? models. The next figure indicates how to model a stiff shaft interconnection in a motor-generator set when friction torque is ignored in machine 2. The speed output of machine 1 (motor) is connected to the speed input of machine 2 (generator), while machine 2 electromagnetic torque output Te is applied to the mechanical torque input Tm of machine 1. The Kw factor takes into account speed units of both machines (pu or rad/s) and gear box ratio w2/w1. The KT factor takes into account torque units of both machines (pu or N.m) and machine ratings. Also, as the inertia J2 is ignored in machine 2, J2 referred to machine 1 speed must be added to machine 1 inertia J1.
simulink-matlab仿真教程
simulink matlab 仿真环境教程 Simulink 是面向框图的仿真软件。 演示一个Simulink 的简单程序 【例1.1】创建一个正弦信号的仿真模型。 步骤如下: (1) 在MATLAB 的命令窗口运行simulink 命令,或单击工具栏中的图标,就可以打开Simulink 模块库浏览器 (Simulink Library Browser) 窗口,如图1.1所示。 (2) 单击工具栏上的图标或选择菜单“File ”——“New ”——“Model ”,新建一个名为“untitled ”的空白 模型窗口。 (3) 在上图的右侧子模块窗口中,单击“Source ”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink 下的Source 子模块库,便可看到各种输入源模块。 (4) 用鼠标单击所需要的输入信号源模块“Sine Wave ”(正弦信号),将其拖放到的空白模型窗口“untitled ”,则“Sine Wave ”模块就被添加到untitled 窗口;也可以用鼠标选中“Sine Wave ”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave ”模块添加到untitled 窗口,如图1.2 所示。 图7.1 Simulink 界面
(5) 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope ”模块(示波器)拖放到“untitled”窗口中。 (6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。如图1.3所示。 (7) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。如图1.4所示。 (8) 保存模型,单击工具栏的图标,将该模型保存为“Ex0701.mdl”文件。 1.2 Simulink的文件操作和模型窗口 1.2.1 Simulink的文件操作 1. 新建文件 新建仿真模型文件有几种操作: ?在MATLAB的命令窗口选择菜单“File”“New”“Model”。 图7.2 Simulink界面 图7.3 Simulink模型窗口 图7.4 示波器窗口
matlab-simulink 初级教程
Simulink仿真环境基础学习 Simulink是面向框图的仿真软件。 7.1演示一个Simulink的简单程序 【例7.1】创建一个正弦信号的仿真模型。 步骤如下: (1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图7.1所示。
(2) 单击工具栏上的图标或选择菜单“File ”——“New ”——“Model ”,新建一个名为“untitled ”的空白模型窗口。 (3) 在上图的右侧子模块窗口中,单击“Source ”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink 下的Source 子模块库,便可看到各种输入源模块。 (4) 用鼠标单击所需要的输入信号源模块“Sine Wave ”(正弦信号),将其拖放到的空白模型窗口“untitled ”,则“Sine Wave ”模块就被添加到untitled 窗口;也可以用鼠标选中“Sine Wave ”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave ”模块添加到untitled 窗口,如图7.2所示。 图7.1 Simulink 界面
(5) 用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。 (6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。如图7.3所示。 (7) 开始仿真,单击“untitled ”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。双击“Scope”模块出现示波器显示屏, 可以看到黄色的正弦波形。如图7.4所示。 图7.2 Simulink界面
matlab的Simulink简介
Simulink是MATLAB最重要的组件之一,它提供一个动态系统建模、仿真和综合分析的集成环境。在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。Simulink具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点,并基于以上优点Simulink已被广泛应用于控制理论和数字信号处理的复杂仿真和设计。同时有大量的第三方软件和硬件可应用于或被要求应用于Simulink。 Simulink是MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。Simulink可以用连续采样时间、离散采样时间或两种混合的采样时间进行建模,它也支持多速率系统,也就是系统中的不同部分具有不同的采样速率。为了创建动态系统模型,Simulink提供了一个建立模型方块图的图形用户接口(GUI) ,这个创建过程只需单击和拖动鼠标操作就能完成,它提供了一种更快捷、直接明了的方式,而且用户可以立即看到系统的仿真结果。 Simulink;是用于动态系统和嵌入式系统的多领域仿真和基于模型的设计工具。对各种时变系统,包括通讯、控制、信号处理、视频处理和图像处理系统,Simulink提供了交互式图形化环境和可定制模块库来对其进行设计、仿真、执行和测试。. 构架在Simulink基础之上的其他产品扩展了Simulink多领域建模功能,也提供了用于设计、执行、验证和确认任务的相应工具。Simulink与MATLAB® 紧密集成,可以直接访问MATLAB大量的工具来进行算法研发、仿真的分析和可视化、批处理脚本的创建、建模环境的定制以及信号参数和测试数据的定义。 丰富的可扩充的预定义模块库 交互式的图形编辑器来组合和管理直观的模块图 以设计功能的层次性来分割模型,实现对复杂设计的管理 通过Model Explorer 导航、创建、配置、搜索模型中的任意信号、参数、属性,生成模型代码 提供API用于与其他仿真程序的连接或与手写代码集成 使用Embedded MATLAB?模块在Simulink和嵌入式系统执行中调用MATLAB算法 使用定步长或变步长运行仿真,根据仿真模式(Normal,Accelerator,Rapid Accelerator)来决定以解释性的方式运行或以编译C代码的形式来运行模型 图形化的调试器和剖析器来检查仿真结果,诊断设计的性能和异常行为 可访问MATLAB从而对结果进行分析与可视化,定制建模环境,定义信号参数和测试数据 模型分析和诊断工具来保证模型的一致性,确定模型中的错误 平面连杆机构 英文名称: planar linkage mechanism
(完整word版)MATLABsimulink中的基本模块的参数、含义、应用..
电力线路模块 PI Section Line 单项π型线路单相传输线模块。 电阻,电感和电容的传输线,沿着线是均匀分布的。级联几个相同的PI部分是通过以下方式获得一个近似的分布参数线路模型的Three-Phase PI Section Line 三相电力线路模块实现了一个平衡的三相传输线模型参数集中在π部分。相反,沿着线的电阻,电感和电容是均匀分布的分布参数线路模型,三相PI剖面线块肿块行参数在一个单一的π部分所示,在图中只有一相下代表。 被指定为正序和零序的,要考虑到的参数之间的感性和容性耦合的三相导体,以及地面参数的参数R,L,和C线。在此方法的指定行参数假设,这三个阶段是平衡的。 使用一个单一的PI部分的模型是适当的传输线或短,在感兴趣的频率范围是有限的基频周围建模。你可以得到更准确的模型通过级联多个相同的块。见PI剖面线的最大频率范围的说明,通过PI线模型,可以实现。
频率用于R L C规范 指定行参数所用的频率,以赫兹(Hz)。这通常是标称系统频率(50赫兹或60赫兹)。 正序和零序电阻 正序和零序电阻欧姆/公里(Ω/公里)。 正序和零序电感 正序和零序电感:亨利/公里(H/公里)。 正序和零序电容 正序和零序电容法拉/公里(F /公里)。 线路段长度(KM) 该生产线部分长度在千米(公里)。 Three-Phase Transformer (Two Windings) 三相变压器(两个绕组) 使用三个单相变压器,三相变压器三相变压器两个绕组块实现了。您可以模拟饱和的核心不是简单地通过在参数菜单中设置相应的复选框块。线性变压器块和可饱和变压器块部分的单相变压器的电气模型的详细说明,请参阅。 可以以下列方式连接的两个绕组的变压器: 1)Y 2)Y与中性点 3)接地Y 4)三角洲三角洲(D1),30度的滞后Y通过 5)D11)三角洲,三角洲领先的Y通过30度 Three-Phase V-I Measurement 三相电压-电流测量
matlAB,SIMULINK联合仿真经典例子
数控螺旋面钻头尖刃磨机的机构仿真 一、原理 图1二并联杆数控螺旋面钻头尖刃磨机床示意图 图2 二并联杆数控螺旋面钻头尖刃磨机床刃磨原理图 重要假设条件: 1、二并联杆数控螺旋面钻头尖刃磨机床是通过两组并联杆(2,a和3,b)保证动平台4 只在空间中做水平运动,而没有翻转运动。每一组并联杆是由空间相互平行的4根杆件组成,由于组内各杆件受力相同,所以将其简化成平面机构如图2。构件a,b是保证动平台4只做水平运动的辅助平行杆,所以可以假设将机构中杆件a,b省略,而动平台4只做水平移动,没有翻转运动,也就是4相对于地面的夹角θ4恒等于0。 2、直线电机的次子有两个(1和5)但是在加工过程中并不是两者同时运动,所以假设5 与导轨固联。 3、假设机床在工作过程中动平台4只受到树直向上的恒力作用,且作用在其中心位置。基于以上假设机床平面结构示意图如图3。
图3二并联杆数控螺旋面钻头尖刃磨机床简化机构平面结构示意图 二、建立仿真方程 C2=cos(θ2) S2=sin(θ2) C3=cos(θ3) S3=sin(θ3) 一)力方程(分别对各个杆件进行受力分析) 对动平台4:受力分析如图4 图4动平台4的受力分析 对并联杆2:受力分析如图5 图5并联杆2的受力分析 对直线电机滑块1:受力分析如图6 图6直线电机滑块1的受力分析
对并联杆3:受力分析如图7 图7并联杆3的受力分析 二)闭环矢量运动方程(矢量图如图8) 图8 闭环矢量图 矢量方程为:R1+R2=R3+R4 将上述矢量方程分解为x 和y 方向,并分别对方程两边对时间t 求两次导数得: r1_dot_dot+r2*α2*S2+r2*w2^2*C2=r3*α3*S3+r3*w3^2*C3 (12) r2*α2*C2-r2*w2^2*S2=r3*α3*C3-r3*w3^2*S3 (13) 三)质心加速度的矢量方程
matlab-SIMULINK仿真实例
二并联杆数控螺旋面钻头尖刃磨机的机构仿真 一、仿真原理一、实训题目:全自动洗衣机控制系统 实训目的及要求: 1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力 2、掌握PLC梯形图的基本设计方法 3、培养分析和解决实际工程问题的能力 4、培养程序设计及调试的能力 5、熟悉传输带控制系统的原理及要求 实训设备:: 1、OMRON PLC及模拟实验装置1台 2、安装CX-P编程软件的PC机1台 3、PC机PLC通讯的RS232电缆线1根 实训内容: 1、分析工艺过程,明确控制要求 (1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。 (2)2秒后开始洗涤。 (3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。 (4)循环5次,总共320秒,然后开始排水。排水后脱水30秒。 图1 全自动洗衣机控制 2、统计I/O点数并选择PLC型号 输入:系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。 PLC的型号:输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。可以选OMRON公司的CPM1A/CPM2A 型PLC就能满足此例的要求。 3、I/O分配 表1 全自动洗衣机控制I/O分配表 输入输出 地址名称地址名称 00000 启动系统按钮01000 排水显示灯 00001 高水位选择按钮01001 脱水显示灯 00002 中水位选择按钮01002 进、出水显示灯 00003 低水位选择按钮01003 高水位显示灯 00004 排水液位传感器01004 中水位显示灯 00005 停止系统按钮01005 低水位显示灯 00006 高水位液位传感器01006 电机正转显示灯 00007 中水位液位传感器01007 电机反转显示灯 00008 低水位液位传感器 4、PLC控制程序设计及分析 实现功能:当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。中间继电器20000为系统总启动。 实现功能:当按下按钮00001,中间继电器20001得电并自锁;当中间继电器20002、20003、20004、20007任意一个为ON,或按下停止按钮00005,或01000、01001为ON时,中间继电器20001掉电。
电力系统的MATLABSIMULINK仿真与应用_第7章
第7章高压电力系统的电力装置仿真 7.1 输电线路串联电容补偿装置仿真 7.2 基于晶闸管的静止无功补偿装置仿真 7.3 基于GTO的静止同步补偿装置仿真 7.4 基于晶闸管的HVDC系统仿真 7.5 基于VSC的HVDC系统仿真
7.1 输电线路串联电容补偿装置仿真 串联电容补偿就是在线路上串联电容器以补偿线路的电抗。采用串联电容补偿是提高交流输电线路输送能力、控制并行线路之间的功率分配和增强电力系统暂态稳定性的一种十分经济的方法。但是,超高压输电线路加装串联补偿后会引发潜供电流、断路器暂态恢复电压(TRV)及次同步谐振(SSR)等一系列系统问题,而且在故障和重合闸动作时可能会在系统中引起很大的过电压。本节主要讨论串联电容器的建模和次同步振荡等有关现象。
图7-1 系统单相电路图 7.1.1 系统描述 图7-1中,6台350 MVA 的发电机通过一条单回路600 km 的输电线路与短路容量为30000 MVA 的系统相连。输电线路电压等级为735 kV ,由两段300 km 的线路串联组成,工频为60 Hz 。
为了提高线路输送能力,对两段300 km的线路L1和L2 进行串联补偿,补偿度为40%,两段线路上均装设330 Mvar 的并联电抗器,用于限制高压线路的工频过电压和操作过电压。补偿设备接到母线B2的线路侧,B2通过一个300 MVA、735kV/230kV/25 kV的变压器向230 kV侧的250 MW负荷供 -Y0-D。 电,变压器接线方式为Y 串联电容补偿装置由串联电容器组、金属氧化物变阻器(MOV)、放电间隙和阻尼阻抗组成,如图7-2所示。
MATLABsimulink系统仿真分析仿真报告,DOC
仿真报告 课程名称:自动化技术导论 报告题目:MATLAB/simulink系统仿真分析 班级 姓名 学号 xxxxxx自动化学院 2016年4月
软件版本:MATLAB R2010b MATLAB强处理能力 MATLAB是一个包含大量计算算法的集合。其拥有600多个工程中要用到的数学运算函数,可以方便的实现用户所需的各种计算功能。函数中所使用的算法都是科研和工程计算中的最新研究成果,而且经过了各种优化和容错处理。在通常情况下,可以用它来代替底层编程语言,如C和C++ 。在计算要求相同的情况下,使用MATLAB的编程工作量会大大减少。MATLAB的这些函数集包括从最简单最基本的函数到诸如矩阵,特征向量、快速傅立叶变换的复杂函数。函数所能解决的问题其大致包括矩阵运算和线性方程组的求解、微分方程及偏微分方程的组的求解、符号运算、傅立叶变换和数据的统计分析、工程中的优化问题、稀疏矩阵运算、复数的各种运算、三角函数和其他初等数学运算、多维数组操作以及建模动态仿真等。 MATLAB图形处理 MATLAB自产生之日起就具有方便的数据可视化功能,以将向量和矩阵用图形表现出来,并且可以对图形进行标注和打印。高层次的作图包括二维和三维的可视化、图象处理、动画和表达式作图。可用于科学计算和工程绘图。新版本的MATLAB 对整个图形处理功能作了很大的改进和完善,使它不仅在一般数据可视化软件都具有的功能(例如二维曲线和三维曲面的绘制和处理等)方面更加完善,而且对于一些其他软件所没有的功能(例如图形的光照处理、色度处理以及四维数据的表现等),MATLAB同样表现了出色的处理能力。同时对一些特殊的可视化要求,例如图形对话等,MATLAB也有相应的功能函数,保证了用户不同层次的要求。另外新版本的MATLAB还着重在图形用户界面(GUI)的制作上作了很大的改善,对这方面有特殊要求的用户也可以得到满足。 MATLAB对许多专门的领域都开发了功能强大的模块集和工具箱。一般来说,它们都是由特定领域的专家开发的,用户可以直接使用工具箱学习、应用和评估不同的方法而不需要自己编写代码。领域,诸如数据采集、数据库接口、概率统计、样条拟合、优化算法、偏微分方程求解、神经网络、小波分析、信号处理、图像处理、系统辨识、控制系统设计、LMI控制、鲁棒控制、模型预测、模糊逻辑、金融分析、地图工具、非线性控制设计、实时快速原型及半物理仿真、嵌入式系统开发、定点仿真、DSP与通讯、电力系统仿真等,都在工具箱(Toolbox)家族中有了自己的一席之地。 MATLAB程序接口 新版本的MATLAB可以利用MATLAB编译器和C/C++数学库和图形库,将自己的MATLAB程序自动转换为独立于MATLAB运行的C和C++代码。允许用户编写可以和MATLAB进行交互的C或C++语言程序。另外,MATLAB网页服务程序还容许在Web应用中使用自己的MATLAB数学和图形程序。MATLAB的一个重要特色就是具有一套程序扩展系统和一组称之为工具箱的特殊应用子程序。工具箱是MATLAB 函数的子程序库,每一个工具箱都是为某一类学科专业和应用而定制的,主要包括信号处理、控制系统、神经网络、模糊逻辑、小波分析和系统仿真等方面的应用。 MATLAB应用软件开发
ProENGINEER与MATLABsimulink联合仿真设置
Pro\ENGINEER与MATLAB\simulink联合仿真设置 一、首先确认安装proe时,安装了pro/toolkit,如下为pro/toolkit安装说明 1、在默认安装时是不安装pro/toolkit,在安装过程中选择pro/toolkit,如下图 注意:安装proe时,安装目录不要有空格,在进行二次开发时,有空格容易出错。 二、安装matlab工具smlink工具,可以到matlab官方下载,免费的。 1、安装smlink(可以到https://www.360docs.net/doc/7e12833418.html,/products/simmechanics/download_smlink.html 下载)。 1)将smlink30.win32.zip和install_addon.m放入MATLAB起始位置目录下面,打开matlab 2) 在MATLAB命令窗口输入install_addon('
matlab_4_SIMULINK仿真 及 DEE实例步骤
SIMULINK & DEE简介 ※如何进入SIMULINK? Step1:进入MA TLAB Step2: 方法一:在workspace输入simulink的指令。 利用以上方法会获得下面的结果
※ 如何利用SIMULINK 解ODE Example1:231 1 +-='x x Step1:?'=dt x x 11 ? 在Library 中点选Continuous ,在Continuous 中选取integrator ,按住鼠标左键拖曳至untitled 中,分别在各接点拉上连接线并标明各个涵义。 Step2:231 1 +-='x x (1)从Math 中点选Gain 的图标,拖曳至untitled 中,并选取命令列中Format/Flip Block 使其转 180
(2)从Math中,拖曳Sum至untitled中 (3)从Source中,用鼠标拖曳Constant至untitled,并把各点连结起来。 (4)从Sink中拖曳Scope至untitled中,并与 x连结 1
(5)把Constant改为2,把Gain改为-3。 Step3:设定参数 (1)选择Simulation/Parameters (2)调整适当的起始时间、结束时间和数值方法。
(3)点选Simulation/Start ,开始仿真。 (4)点选Scope ,显示仿真的结果。 Example2:???+-='+='-)cos(212 211t x x x e x x x t 1)0(0 )0(21==x x Step1:?? ?'= '= ??dt x x dt x x 2 211 ? (1)点选Continuous 中之Integrator ,拖曳至untitled 。
simulinkmatlab仿真
simulink matlab仿真环境教程 Simulink是面向框图的仿真软件。 演示一个Simulink的简单程序 【例1.1】创建一个正弦信号的仿真模型。 步骤如下: (1) 在MATLAB的命令窗口运行simulin k命令,或单击工具栏中的图标,就可以打开Simulink模块库 浏览器(Simulink LibraryBrowser)窗口,如图1.1所示。 图7.1 Simulink界面 (2)单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled” 的空白模型窗口。 (3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。 (4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“SineWave”模块就被添加到untitled窗口;也可以用鼠标选中“SineWave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图1.2所示。
(5) 用同样的方法打开接收模块库“Sinks ”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。 (6)在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。如图1.3所示。 (7) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。如图1.4所示。 (8) 保存模型,单击工具栏的图标,将该模型保存为“Ex0701.mdl”文件。 1.2Simulink的文件操作和模型窗口 1.2.1Simulink的文件操作 1. 新建文件 新建仿真模型文件有几种操作: ?在MA TLAB的命令窗口选择菜单“File”→“New”→“Model”。 ?在图1.1的Simulink模块库浏览器窗口选择菜单“File”→“New”→“Model”,或者单击工具栏的图标。 图7.2 Simulink界面 图7.3 Simulink模型窗口 图7.4 示波器窗口