定量给料机说明书-word文档.

1、概述
什么是INTECONT?
INTECONTPLUS是用于计量、控制、喂料设备的量计算系统。
本手册所述输送皮带控制系统如下:l)给料机
依据带速控制喂料流量。2)皮带秤+预给料机
依据皮带秤负载测量、控制喂料流量。3)皮带秤
依据带速控制皮带负载。资料:操作手册FH45A
定义:I=喂料速度
单位:kg/h或t/h
单位时间内通过皮带的物料量
P=喂料速率设定值
依据设定值控制实际值。单位:kg/h或t/h
Z=喂料量单位:kg或tV=传送带速度单位:nl/SQ=皮带负载
单位:kg/m
皮带计量仪上所示物料重量。QB=称重段平台负载单位:kgY=控制器调节量单位:mAXd=控制偏差单位:%
设定值/实际值
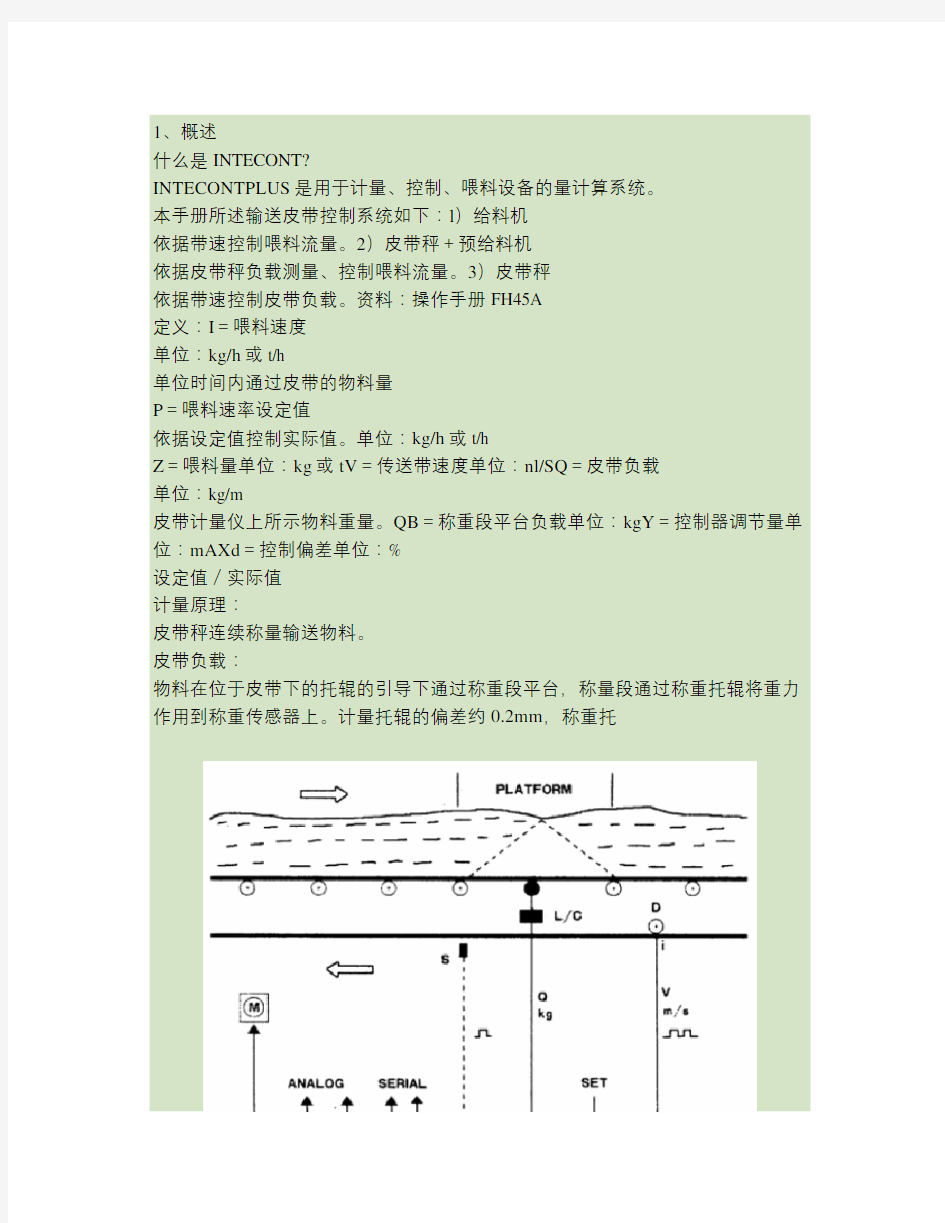
计量原理:
皮带秤连续称量输送物料。
皮带负载:
物料在位于皮带下的托辊的引导下通过称重段平台,称量段通过称重托辊将重力作用到称重传感器上。计量托辊的偏差约0.2mm,称重托
辊同框架连接,如采用平行弹片连接。
与称重段负荷成正比的,负荷传感器输出电压被放大后传送到配有模拟/数字转换设备的INTECONT微处理机中。
白色三角形符号表示单托辊称重段的负载分配。只有一半的物料重力作用于称重托辊上。依据称量技术,负载相应换算成标准皮带长度。Leff=Lg/Z
Leff=有效皮带长度Lg=总平台长度因为平台配各种各样的称重托辊,所以1/2的指数不适用。
因此,皮带负载(单位:k/m)如Q=QB/LeffQB=总平台负载
带速:
为了更进一步测量喂料速率(流量),通过速度传感器D获得带速V井转换成相应的脉冲频率。
如果带速衡定同时精度要求不高,速度测量可以省略。喂料速率(流量)
测量值Q和V由INTECONT规范为物理值kg/m,m/s同时与另外的仪表并联。结果为流量
l。
控制:给料机
传送带从缓冲仓输出物料。
将设定值与测得的实际喂料量随时进行比较,将所得差值,传送给调节器R。调节器随时调整皮带速度,改变喂料量,直
到实际喂料量与设定值相等。
2、皮带称+预给料机
以皮带载荷变化作为设定值控制喂料量。
皮带速度为标准常数。
控制流量的预给料机要求配有一个调节器以便使用。3、皮带秤
非控预给料机通常用于向传送带供料。调节器随时调节带速以便皮带负载总保持标准值
Q0。
称量点固定以确保达到最高的计量精度。出料口流量与预给料机喂料速率(流量)一致。动力单元:
所有驱动装置都需有一外接动力单元用于控制速度等。操作方式:1、重量方式:
可控方式,同上所叙。2、容积方式:
非可控方式,如带速、顶给料机,控制给料量,给料量不断积累达到设定值。不考虑流量的计量或皮带负载实际值。两种方式均采用对话方式选择。
另外,亦可执行专门的启动和清除功能。运行来源:
一些功能的运行可以通过不同的来源进行:
1、设定值来源健盘
模拟输入
2、启/停来源健盘
串行口
3、复位计数器来源健盘
串行口
4、应答信号来源键盘触点输入串行口
使用健盘方式设置1和2,用键盘方式,预先选择重新设置的来源。
开关信号(启/停)并行于预先选择的来源。计量技术:●使用AC电压连续精确的进行零点设置和范围调整。
●高分辨率模拟/数字转换器。累积方法确保电源,电压的影响被有效清除。
●16—bit微型调控器
●
巨大的计算机读数、程序配置、标定存储器。
输入/输出:
下列数据表明了基本型号的输入/输出备符号。V—速度传感器Q—负荷传感器Y—模拟输出控制SET—设定模拟输入
ANALOG—可用模拟输出流量、皮带负载、带速或偏差
SERLAL—串行打印机与主计算机联接
24V—输出电压
MIN—MIN值输出监测器
Open—超过下限
MAX—MAX值输出监测
Open—超出上限
流量、皮带负载或带速的MIN、MAX值均可分别被测控。ALARM—秤体报警0pen—ALARMCONTROLDEV—偏差输出
Open—偏差过大ACKNOWLEDGE:—应答信号
H—接收
DRIVE—皮带驱动控制输出
Close—STARTPREFEEDER—预给料机控制输出
Closed—START
4START一开始秤量、累积Hedge一STARTSTOP—停止称量(释放)L—停止START—秤体连接(输出)closed—STARTZ—外接累加器的脉冲输出
2、技术数据和字符●前面板安装VEG20610前面板:96×288mm前面板截断面:88×282,墙厚度:max.10mm安装深度:Min.225mm(包括50mm用于安装连接器)
保护级:IP20,前面板为IP65材料:塑料,灰色(RAL7022)
显示:荧光显示,2行20个字符,6mm高度键盘:可触摸柔性薄膜
信号灯:LED2×绿色,3×红色
输出电压:24VDC+30%,-25%,max,IA,无保险,换级保护线圈。
电源:FNT55,230V,+10%-15%5OHz
FNT56,11SV+10%一15%60Hz
安全低电压:VDE551
计量尺寸:77×103×70mm
电器包含底板和插件
V005
●嵌入式安装单元FIP005O,0060,板安装单元FIP-0403
宽×高×深度:380×300×236mm
针孔排列:322×330or410×242(直线排列)保护级:IP65
材料:薄钢板1.5mm,灰色
输出电压:230V+10%-15%,50Hz(FIPOO50)
115V+10%-15%,6OHz(FIP0060)
●周围环境
温度:-25℃~45℃湿度:F级(DIN4O040)抗干扰标准:IEC801噪单抑制:VDE871,EN550ll外壳防护:IEC348EC推荐:CE标志
热带型(R级)亦适用于上述要求
●存贮温度:-40℃~80℃
●连接
插头/螺栓连接(phonixCombicon)不能转换
●输出控制
数量:71/O继电器触点信号状态:
MIN信号—OpenMAX信号—OpenAlarm—Open
START驱动—Closed
偏差—Closed
预给料机START—Closed秤体运行—Closed
负载:
Max,230V(AV)&A电阻匀载,IA电感
如果错误信号“CPUNotOK"出现,那么所有的触点都断开。
●输入控制
数量:2
类型:NAMUR(DIN19234)短路和电缆线断开监测。
●模拟输出
电流:0/4~20mA外加电压载荷:Max.500Ω
参考:OV(用户选择),电镀绝缘分辨度:2500d士ld
输出:可以选择“流量、皮带负载,带速或偏差”
如果出现“CPUNotOK",那么输出信号变为omA
●模拟输出
2
输出:调节器控制数据:见上。
●模拟输入
输出:设定流量电流:0/4…20mA
载荷:500Ω
参考:内POV,电镀绝缘分辨度:1024d士1/2d
精度:<0.4%,正常温度范围内
●外接累加计一数器
频率:Max,1OHz
脉冲长度:可选择范围50……1000ms输出:24V,max,1OOmA
HIGH和LOW有效,隔离,短路保护,极限电流350mA.
内部存贮的负值需要正值不断对之。进行补偿,直到下一个脉冲输出。这样,即使在皮带负载处于最低值时亦可保证整体的精度。
●串行打印机接口
型号:RS422(V24),max:19200baud,RS485Modbus),带软件FKB0201
数据格式:8数据码,1位停止码,无奇偶间隔:无电流
连接器:9针,sub—D(HD2O)
打印数据:参数,批处理数据,错误信息,SPC报告
简要记录:见操作手册
●
串行主机接口
型号:RS422,max,19200baud,由FDB02OI软件支撑的RS485型(Modbus)
数据格式:8个数据码,1个开始码,一个停止
码,有奇偶。
连接器:9针,sub一D(HDZO)
数据:所有的计量数据、控制命令、信息。
●速度输入
频率:5…250OHZ
型号:2芯接触开关(Namur)监控:线缆断裂、短路线缆长度:max500m
●负荷传感器连接
输出电压:士5VAC,(近似25Hz,士3%)周期计算:80ms(50HZ),66,68ms(50HZ)噪声抑制:依靠周期计算;结合A/D转换载荷:R(负荷传感器)min80Ω线缆:电压降至max30%max500m计算范围:0…30Mv
●停电
称量数据,校准值,计算机读数,累加器脉冲在停电后亦可储存、时间可存5天。
●对话
选择:英语,德语,法,西班牙语,意大利语错误信息,操作和月仗务程序
●单位(可选择)
SI单位:
kg,kg/ht,t/hm,cm
NON-SI单位:Ib,Ib/ht,t/hf,inch
(见“参数表”)
●运行来源
1、设定值来源
健盘
模拟输入串行口2、启/停来源
健盘串行口3、复位计数器来源并联
健盘或串行口4、接受错误来源
并联
健盘模拟输入串行口
键盘(启/停)采用并联选择(启/停)来源
●释放、紧急停止
依据输入STOP实现此功能
●显示
上段:设定值
下段:计数累加加器Z1…Z3
P绝对流量I相对流量Ir带速V皮带负载Q公差控制
Xd
下行可由操作员预先选择
●信号灯(上至下)
VOLTAGE(电压)OK(绿色)
PROCESSOR(程序处理器)OK(绿色)ALARM(报警)(红色)MIN(红色)MAX(红色)
●事件信息
事件和故障通过数码显出来。
用键盘输入相应的清除程,故障信息有警告和报警两种。报警时,给料机自动停止运行。
警告,通过触点输出MIN,MAX和零点偏差超出
各自的事件类别。事件信息出现后,给料机处于停止状态,不输出任何信号,直到事件信息被接收和清除。
●操作原理
操作者通过各级的菜单引导各种功能,较重要的结构、校准功能采用密码加以保护。
●控制原理
1、给料机
2、皮带秤+预给料机
3、皮带秤
用户可以消除皮带负载、带速、测理功能以便应用于其它方面。
●启动和清除方式
自动启动模式和自动清除模式之间可通过无冲击转换开关进行选择。
●模拟模式
称量系统可以通过专门功能进行操作而不需依靠机械设备,例如,检验系统。●置零(调零)
使用自动运行程序在无负载情况下,开始调零,调零过程中对极限值进行监测。
●除皮
为了获得基本皮重,原则上,除皮程序与调零程序具有同样的功能,除皮值不被监控,但是将除皮值贮存并用密码加以保护。
●MIN
/MAX信号输出
两个专用的可选择极限值,可对信号灯中继输
出进行监控,两种方式都可用做事件记录。MIN或MAX用以选择:l、流量2、皮带负载3、带速
●显示滤波器
选择显示流量、皮带负载、速度偏差
●维修帮助
作为维修帮助,显示事件1、输入电压2、启动给料机
●生产过程控制统计SPC
平均值、偏差变化、极大值存贮、调零表等均可作为服务值。
●工作变更
无需更换电器部分
●校准
本身不需校准,只需输入一些有关负荷传感器结构以及皮带倾斜度等数据。INTECONT计算机所要求的显示,标定、重新校准,对下列两种中任何一种都适用。a.物料检查
将物料检查结果输入INTECONT以便对计量结果进行更正
b.祛码标定
专用砝码标定程序保证了标定的规范化,而
且如果某一技术数据(杠杆比、皮带仰角等)不确切,那么可以对之进行更正,进行后一种操作时,程序可用以检查机械部分的变化,如由于基础下沉而引起的秤重平台扭曲等。
依据分配功能调入程序
调入分配功能
如果没有有效的事件信息,显示屏最后被选择的功能;否则“显示事件信息”
选择需要的功能
功能开始
重新回到标准显示状态或退出程序运行和校准功能引导详细的菜单以备操作者进行选择S=由密码对校准功能进行保护调入功能后密码被激活E=只适用于事件信息有效时对于相对的功能,如启/停功能,只有当功能正被调入时才可以执行。在称量进行期间,对分配功能选择无效。三个程序的设置便于标定和重新标定的开始。l、脉冲、皮带环行LB2、除皮TW3、祛码检查CW首次标定使用上述命令中的功能。所有的程序都能在标定功能下完全运行并自动采用密
码进行保护。
程序运行时:
l、不进行累加。
2、模拟输出置于最低值
3、无事件信息被排除。
操作顺序与所有程序操作顺序一致。
调入分配功能
选择“标定功能”进入下端显示区
确认。输入密码07734
认可。
显示屏设置程序中的一个,例如TW:除皮。信息S5表示“采用密码”和程序运行结束后约有2分钟的空隙。
开始设置程序的运行
重新回到标准显示状态。
信号S5消除后,标定菜单不需要
重新输入密码即可再次调入。
程序设置LB:IMP/BAND只在下列情况调入:l、首次校验
2、安装新带或皮带拉力显著改变。
3、如果给料机有进行速度计量,参数B04(特征值os)orB5(标准速度)发生变化。
程序运行后可得到一个皮带周期内速度传感器脉冲数量。
脉冲数量用来作为程序的皮带周期码。l、手动或自动调零〉02、除皮TW3、砝码检查CW前提:
1、调入程序前,一个皮带循环所需时间的计
量要达到最大的精度同时依据参数CO3输人值。2、传送带必须处于运行状态(启动秤体)3、容积方式
操作顺序:
1、分配功能
2、标定功能
3、认可
4、输入密码07734
5、认可
6、选择“LB:脉冲/皮带运行”到
下段显示区7、认可8、退出
设置程序不能控制皮带驱动装置和预给料机。如果所需前提不能满足,那么就会退出程序并输出错误信息。
程序运行:
上部显示:用秒为单位表小的剩余程序运行时间。下部显示:速度传感器脉冲量。
程序结束:
上部显示:在总运行时间内皮带速度的平均值。
下部显示:脉冲/皮带运行周期脉冲总和。
依据参数D06获取结果并存储。
不需要取得结果。
即使在未实行速度计量的情况下,操作顺序仍是相同的。特殊信息:
l、如果皮带未运行
2、如果未事先选择容积方式。
运行除皮程序可以获取一个或多个皮带完整运行周期中皮带称量的零点变化差值。标准操作时,计量结果不断同此值进行比较并予以更正。
原则上,此程序同调零程序是相同的。除皮:在试运行、维修、维护期间获取基本皮
重(机械设备、传送带等重量)。
调零:获取运行中的零点偏差。例如,由污染
振动给料机安全规范样本
工作行为规范系列 振动给料机安全规范(标准、完整、实用、可修改)
编号:FS-QG-61132振动给料机安全规范 Vibration feeder safety specification 说明:为规范化、制度化和统一化作业行为,使人员管理工作有章可循,提高工作效率和责任感、归属感,特此编写。 1主题内容与适用范围 本标准规定了振动给料机的设计、制造、安装、使用维护方面最基本的安全要求。 本标准适用于电磁振动给料机、惯性震动给料机以及其他形式的振动给料机设备本身,不包括连接这类设备的构件。 如果设备用于输送危险、有毒等有害物料,用户用在订货时向制造厂声明,制造厂应向安装使用单位提交应遵守的专用安全条件。 2引用标准 GB5083生产设备安全卫生设计总则 3设计、制造 3.1振动给料机设计时应遵守GB5083中的1.1、1.3~1.6的规定,
3.2应保证设备在正常工作条件下具有足够的强度,并应考虑动应力效应。 3.3联接螺栓应具备可靠的防松措施。 3.4振动给料机必须满足停止工作时所输送的物料不下滑。 3.5对机械运动部件、特别是惯性振动器的旋转偏心块应设置防护装置。 3.6在完全封闭的设备上应装有带自锁装置的检查孔或活盖。 3.7振动给料机的空载噪声值不得大于85dB(A)。 4安装 4.1在给料槽处应装设导料板和对中装置。 4.2悬挂或支撑振动给料机的机架应具有足够的刚度,吊杆度应避免与其他物体接触。 4.3装在移动式机架上的振动给料机应装有止动装置。附加的滚轮在操作人员容易接近的地方应加防护装置。 4.4当操作人员必须留在移动设备上时,必须装设平台,平台应能防止操作人员与任何障碍物相接触。
申克定量给料机教程
申克定量给料机 第一章工作原理 定量给料机的工作原理分为计量原理和控制原理两个部分。 一.计量原理: 计量平台连续称量输送的物料。 物料在皮带引导下通过计量平台,计量平台通过称重托辊将物料重力作 用在称重传感器上。计量平台 用十字弹片与框架连接。 称重传感器产生一个与 作用力成比例的电压信号,送 入INTECONT PLUS仪表内, INTECONT PLUS仪表将此电 压信号放大后转换成数字信 号送入微处理机中。 白色三角形区域表示单 托辊的负荷分配,计量平台范围内只有一半的物料重力作用于称重托辊上。根据称量技术,换算成标准单位皮带负荷。 有效称量长度: L (m) Leff = 2 其中:L为计量平台长度。 皮带负荷如下: Q(Kg/m) q = Leff 测速用的极轮安装在电机轴上,根据极轮的凹凸外形,速度传感器产生脉冲信号,送入INTECONT PLUS仪表内并转换成数字信号送入微处理
机中,计算出皮带速度V。 微处理机根据皮带负荷q和皮带速度V计算出的瞬时流量I: Q×V I = q×V = Leff 二.控制原理: INTECONT PLUS 仪表提供了三种控制方式: 1.定量给料机方式: 通过皮带速度来控制物料流量。这是最常用的工作方式。 定量给料机控制系统是由机械秤体(包括驱动电机和减速机)、称重传感器、速度传感器、控制仪表和电控柜组成,见原理图。 控制过程: a) 计量系统测出通 过皮带的物料流 量; b) 控制电路根据设 定值,调节皮带的 速度,来控制物料 流量并使之恒定。 控制系统: 控制器R将瞬时流 量值I与设定值P相比 较,通过其输出YV,来控制给料机的皮带速度,改变给料机的物料流量,直至流量的瞬时值与设定值一致。
定量给料机安全环境操作规程标准范本
操作规程编号:LX-FS-A32371 定量给料机安全环境操作规程标准 范本 In The Daily Work Environment, The Operation Standards Are Restricted, And Relevant Personnel Are Required To Abide By The Corresponding Procedures And Codes Of Conduct, So That The Overall Behavior Can Reach The Specified Standards 编写:_________________________ 审批:_________________________ 时间:________年_____月_____日 A4打印/ 新修订/ 完整/ 内容可编辑
定量给料机安全环境操作规程标准 范本 使用说明:本操作规程资料适用于日常工作环境中对既定操作标准、规范进行约束,并要求相关人员共同遵守对应的办事规程与行动准则,使整体行为或活动达到或超越规定的标准。资料内容可按真实状况进行条款调整,套用时请仔细阅读。 1、定量给料机启动应遵循工艺系统顺序,严禁带负荷起动,应采用空载试运行。 2、操作人员应熟悉设备,遵守工厂操作、维护、安全卫生等规定。 3、定量给料机停机应符合工艺系统顺序,除特殊事故外,禁止带料停车或停车后继续给料。 4、操作人员在开始工作之前应阅读值班记录,并进行设备的检查,检查各部螺栓是否松动、机面是否破损等。 5、定量给料机在运转过程中应经常观察定量给
料机负载情况,如负荷过重给料机振幅明显减小时应减少给料量, 并应经常检查激振器轴承温升情况,轴承温度不允许大于75℃。 6、停机后应清理机面和给料机周围环境。 定量给料机在操作过程中,我们能做到这些维护,虽然这些操作都是重复和琐碎的,但也是决定机器是否正常运行和使用长久的关键,俗话说:细节决定成败。所以河南丰博自动化有限公司提醒使用者,一定要细心细心在细心,真正的做到维护定量给料机,同时也能提高定量给料机的使用寿命并保证定量给料机的精度。 请在该处输入组织/单位名称 Please Enter The Name Of Organization / Organization Here
振动给料机系列主要技术参数
振动给料机系列主要技术参数 型号最大 进料 粒度 (mm) 处理 能力 (t/h) 电动机 功率 (kw) 安装 倾角 (度) 总重量 (kg) 槽体尺寸 (mm) 外形尺寸 (长×宽×高)(mm) GZD-850×3000400 120 3.7×2 5 3607 850×30003110×1800×1600 GZD-1000×3600500 150 5.5×2 5 3895 1000×36003850×1950×1630 GZD-1100×4200580 240 5.5×2 5 4170 1100×42004400×2050×1660 GZD-1100×4900580 280 7.5×2 5 4520 4900×11005200×2050×1700 GZD-1300×4900650 450 11×2 5 5200 4900×13005200×2350×1750 ZSW-380×95500 96-160 11 0 4082 3800×9603920×1640×1320 ZSW-490×110630 120-280 15 0 5352 4900×11004980×1830×1320 ZSW-600×130750 400-560 22 0 7800 6000×13006082×2580×2083 注:产品性能在不断改进中,参数如有更改,恕不另行通知 ZTGL型给料机 我要订购本产 品
振动给料机主要技术参数
GZD-850×3000850×3000400 120 3.0×2 3.6 5o3110×1800×1600 GZD-1000×36001000×3600500 150 3.7×2 3.9 5o3850×1850×1630 GZD-1100×42001100×4200580 240 5.5×2 4.2 5o4400×2050×1660 GZD-1100×49001100×4900580 280 7.5×2 4.5 5o5200×2050×1700 GZD-1300×49001300×4900650 450 11×2 5.2 5o5200×2350×1750注:远华机械保留更改产品设计与规格的权利,恕不另行通知。 GZG系列自同步惯性振动给料机
DEL、DEM定量给料机使用手册
DEL/DEM系列定量给料机 使 用 手 册 承德承信自动化工程有限公司
目录 第一章概述 (1) 第二章定量给料机外形结构及工作原理 (2) 2.1定量给料机外形结构及组成 (2) 2.2定量给料机工作原理 (4) 2.3定量给料机技术指标 (5) 第三章定量给料机的安装 (6) 3.1 定量给料机的安装准备 (6) 3.2 定量给料机的安装要求及步骤 (6) 第四章定量给料机的调试 (9) 4.1 机械部分调试要求及步骤 (9) 第五章定量给料机的使用及日常维护 (11) 5.1 随时检查制度 (11) 5.2 定期检查、维护、保养、润滑及调整制度 (11) 5.3 设备润滑点 (13) 5.4 设备使用注意事项 (14) 第六章定量给料机常见故障及解决方法 (15) 6.1机械类常见故障 (15)
概述 感谢您选购我公司DEL/DEM系列定量给料机。详细地阅读使用说明手册将有助于您正确安装、操作、使用、维护和管理设备,使设备性能达到最佳。 DEL/DEM系列定量给料机系统是对块状物料、颗粒状物料进行连续输送、计量,并对物料流量进行定量控制的专用设备。其工作原理是在设备运行时,称重传感器把环带载荷信号、速度传感器把环带速度信号输送到称重控制单元,称重控制单元连续地将实际给料量与设定给料量进行比较,并通过变频器调整电机转速,从而实时地控制环带速度,实现定量给料。 DEL/DEM 型定量给料机采用先进的制造工艺,在生产过程中严格按照 ISO9000质量管理体系标准控制产品质量,以其高的精度、稳定性和可靠性,成为散状物料配料与计量的理想设备。
第二章定量给料机的外形结构及工作原理 2.1 定量给料机的外形结构及组成 DEL/DEM系列定量给料机主要由两部分组成,即:电气控制部分和机械部分。其中,电气控制部分主要由控制柜(控制箱)、称重控制仪表、变频器、称重传感器、速度传感器等部件组成;机械部分包括驱动装臵、秤体、主动滚筒、从动滚筒、环形胶带、张紧装臵、内外清扫装臵、承重托辊、称重装臵、料斗、防尘罩、防偏装臵、挡料板等部分。 机械外形结构如下图所示: 1. 环形胶带 2. 驱动装臵 图2-1 DEL/DEM定量给料机俯视图
振动给料机的使用说明书
振动给料机使用说 明书 一、用途、特点及技术性能 振动给料机是一种 较新型的定量给料 设备,能适应于连续性生产的要求。因此在冶金、化工、煤炭、电力、机械、建材、以至轻工、食品、医药等工矿企业已经 比较广泛地用于各 种生产环节中。 振动给料机可以作 为水泥磨机、皮带输送机、斗式提升机、破碎机、粉碎机及各工业部门粘滞性的 颗粒或粉末状料的 供料装置。在上述工矿企业生产流程中,能把物料从储料仓或漏斗中定量均匀连续地给到受料装置中去。 二、特点 (1)给料均匀,产量易于调节,易于实现自动控制。 (2)振动给料机没有回转零件,维护简单,不需润滑,物料在料槽中呈抛物线向前跳跃推进,几乎不在料槽表面滑动,故料槽磨损极小,使用中不需要电动机减速器,由于以上原因,本机省油省电,运用维修费用低。(3)可以输送低于300℃的灼热物料。(4)结构坚固,体
积小,重量轻,安装操作方便。 三、主要技术参数(点击查看) 四、工作原理 可控硅控制器和电磁振动给料机配套使用,用来控制给料机的产量。由于电磁振动给料机的给料机随振幅的大小而相应变化,振幅又随通过电磁振动器线圈电流大小而变化,因此,可以控制通过电磁振动器的电流来调节给料量。这目的是通过改变可控硅整流器的导通角来实现的。 五、工艺配置振动给料机的工艺配置好坏,将直接影响他的生产能力和使用性能。 给料机上部储料仓或漏斗的出口和溜槽的设计布置上要注意以下几个问题。(1)料仓或漏斗出口的布置,应尽可能的不使料仓的负荷直接压在给料机的槽体上。为此,在料仓和漏斗出口与槽体之间应加一溜槽。(2)料仓或漏斗的排料口宽度B,必须满足以下经验公式: A—10≥B≥ (2-3)d 公式中:d----最大
星型定量给料机的设计说明书
摘要 ............................................................................................................................................. I Abstract .................................................................................................................................... II 第1章绪论 ................................................................................................................... - 1 - 1 课题来源及研究目的和意义................................................................................. - 1 - 1.1、选题背景和意义......................................................................................... - 1 - 1.2 定量星形粉体给料机系统概述........................................................................... - 3 - 1.2.1定量星形粉体给料机的基本结构和类型................................................ - 3 - 1.3 主要研究内容....................................................................................................... - 3 -第二章星形粉体给料机的发展概况与展望....................................................................... - 5 - 2.1星形粉体给料机的原理及应用............................................... 错误!未定义书签。 2.1.1 粉体定量给料机的原理.............................................. 错误!未定义书签。 2.1.2星形粉尘给料机的应用............................................... 错误!未定义书签。 2.2 粉体定量给料机未来的发展方向.......................................... 错误!未定义书签。第三章设计任务及要求....................................................................................................... - 6 - 3.1螺旋体 ............................................................................................................ - 6 - 3.1.1螺旋间隙.................................................................................................... - 6 - 3.1.2 螺旋叶片................................................................................................... - 6 - 3.1.3螺旋轴 ........................................................................................................ - 6 - 3.1.4轴承 ............................................................................................................ - 7 - 3.1.5机槽 ............................................................................................................ - 8 - 3.1.6具体要求.................................................................................................. - 10 - 3.2 系统功能设计..................................................................................................... - 10 - 3.2.2确定系统主要参数,编制各执行元件工况图...................................... - 10 - 4.1粉尘给料机驱动装置的选择.............................................................................. - 14 - 4.2进料口设计 .......................................................................................................... - 21 - 4.3螺旋体设计 .......................................................................................................... - 21 -第五章毕业设计总结与展望........................................................................................... - 26 - 5.1 毕业设计总结..................................................................................................... - 26 - 5.2毕业设计展望...................................................................................................... - 26 -参考文献 ............................................................................................................................. - 27 -致谢 ..................................................................................................................................... - 28 -
定量给料机安全操作规程标准范本
操作规程编号:LX-FS-A39447 定量给料机安全操作规程标准范本 In The Daily Work Environment, The Operation Standards Are Restricted, And Relevant Personnel Are Required To Abide By The Corresponding Procedures And Codes Of Conduct, So That The Overall Behavior Can Reach The Specified Standards 编写:_________________________ 审批:_________________________ 时间:________年_____月_____日 A4打印/ 新修订/ 完整/ 内容可编辑
定量给料机安全操作规程标准范本 使用说明:本操作规程资料适用于日常工作环境中对既定操作标准、规范进行约束,并要求相关人员共同遵守对应的办事规程与行动准则,使整体行为或活动达到或超越规定的标准。资料内容可按真实状况进行条款调整,套用时请仔细阅读。 1 开机顺序及注意事项 1.1开机顺序:下线设备开启后,开定量给料机; 1.2停机顺序:关闭上线设备后,等物料送空后停定量给料机; 1.3注意事项: 1.3.1将物料送空后再停机; 1.3.2启动时应将喂料量设定在最底; 2 开机前检查 2.1确认各处润滑油符合要求; 2.2确认皮带附近无异物;
2.3确认皮带无裂痕; 2.4确认传动机构正常、各螺栓紧固; 2.5确认安全防护装置完好。 3 运转中检查 3.1检查皮带是否跑偏,运转是否平稳; 3.2检查进、出料是否流畅,有无堵塞,及时清理以免影响计量的准确性; 3.3检查电机运转是否有异音、异振、异温; 3.4检查皮带张紧度是否合适; 3.5检查安全防护装置是否完好。 4 停机维护保养 4.1检查各轴承润滑情况、添加或更换润滑油; 4.2更换损坏的托辊,清扫传感器上的积灰; 4.3处理皮带起毛,开裂现象,必要时更换皮带;
振动给料机系列主要技术参数
振动给料机系列主要技术参数 ZTGL型给料机 我要订购本产 品 产品概述 ZTGL系列电机振动给料机由输送槽体、振动电机、吊杆及电器控制装置等构成。该机工作原理是用两台单独的振动电机作反向同步旋转,其偏心体产生离心力(即激振力),轨迹为一直线,此直线相对输送槽体在垂直方向有一倾角,使输送槽内的物料产生连续的抛掷运动,从而使物料自受料端向出料端给出。本机结构简单,振动频率低,振幅大,对于较难输送的粘性物料也有较强的输送能力,但强度高,安装维修方便,耗电少,运行费用低。 主要用途
该机主要用于原煤或精选煤的均匀给料,也适用与其它尺寸不大于300mm块状物料。能适应粘性不太大的物料的输送,用于煤矿、建材等行业。 技术参数 参数| 型号ZTGL50 ZTGL60 ZTGL70 ZTGL90 ZTGL100 ZTGL110 ZTGL130 ZTGL150 槽体尺寸长 (mm)1400 1400 1400 1600 1600 1600 1800 1800 宽 (mm)500 600 700 900 1000 1100 1300 1500 高(mm)258 258 258 258 308 308 308 308 给料粒度(mm)0~150 0~150 0~200 0~300 0~300 0~300 0~300 0~300 安装角度5~10 5~10 5~10 5~10 5~10 5~10 5~10 5~10 双振幅(mm)6~12 6~12 6~12 6~12 6~12 6~12 6~12 6~12 料层厚度 (mm)350 350 350 450 500 550 550 600 给料量(t/h )精煤 200~500 250~550 290~540 340~640 420~850 原煤 70~150 100~200 150~230 300~700 350~750 400~800 500~1000 600~1200 型号 ZT10-6 ZT10-6 ZT10-6 ZT10-6 ZT10-6 ZT10-6 ZT10-6 ZT10-6 振动电机 振次 (r/min ) 960 960 960 960 960 960 960 960 功率 (kw)×2×2×2×2×2×2×2×2 仓口尺寸 (mm)600×400 600×500 600×600 800×800 900×900 1000×1000 1000×1200 1000×1400 单支点静负荷(N)1784 2294 2744 4323 6573 7214 8612 10368 单支点动负荷(N)192 192 192 205 298 336 280 304 浏览次数:60 次我要订购本产品 振动给料机主要技术参数 型号料槽尺寸 (mm) 最大进 料粒度 (mm) 生产能力 (t/h) 功率(kw) 机器重 量(t) 安装倾角 外型尺寸 (mm) GZD-850×3000 850×3000 400 120 ×25o 3110×1800×1600 GZD-1000×3600 1000×3600 500 150 ×25o 3850×1850×1630 GZD-1100×4200 1100×4200 580 240 ×25o 4400×2050×1660 GZD-1100×4900 1100×4900 580 280 ×25o 5200×2050×1700 GZD-1300×4900 1300×4900 650 450 11×25o 5200×2350×1750 注:远华机械保留更改产品设计与规格的权利,恕不另行通知。 GZG系列自同步惯性振动给料机
定量给料机安装说明
1、安全信息: 1.1有目的的使用给料机 · 定量给料机是为称重和给料散装固体而设计的。 · 当把你们给的特定物质输入给料机进行调试时,注意那些在相关服务和电子称重指南里给出的说明和在系统文件中所给出的技术数据。 · 定量给料机不是安装用来处理一般原料的,而是用来处理那些设定的原料的。 · 如果定量给料机是一个大型系统或过程的一部分,经常要在调试前确定从逆流平台部分不会有危险出现,例如,定量给料机溢出或顺流设备。 · 对于定量给料机有潜力影响安全的建设性的改变在申克公司没有接受的情况下一定不要实施。这些也是用于安装安全设备以及操作部分的焊接工作。 · 备用零件应该满足申克所规定的技术数据,因此,只有非伪造的备用零件能够使用。 1.2不同系列 这个手册适用于定量给料机INTECONT PLUS系列。 请参考你们具体订购的文件,找出我方提供的系列。 两种系列的不同之处在手册的相关章节中已简要说明。 1.3风险或指示 如果系统不能被正确安装或者被没有经验的人调试或操作,就可能存在风险。在这本指南中,风险的标志如下: 危险:出现这个标志说明了被描述的操作,程序或项目有引起严重伤害的隐 患。遵守所有安全操作的指示来避免发生这些危险。 警告:出现这个标志说明了被描述的操作,程序或项目可能会对机器或其零造成坏。遵守所有安全操作的指示来避免发生这些危险。 损 警告:电压危险! 有电击和电灼伤的危险。 ·禁止触摸 1.4工人的资格 ·只有受过培训的,被授权的工人能够操作服务手册中涉及到的工作。 ·工人必须熟悉安装工作和在起重机上手工安装部分的安全注意事项。 ·测量系统工作必须由有很好技术和控制的工程师来操作。
GZ系列电磁振动给料机说明书
GZ系列电磁振动给料机说明书 (一)用途和特点 1、用途 GZ系列电磁振动给料机广泛应用于矿山、冶金、煤炭、建料、轻工、化工、电力、机械、粮食等各行各业中,用于把块状、颗粒状及粉状物料从贮料仓或漏斗中均匀连续或定量地给到受料装置中去。例如,向带式输送机、斗式提升机、筛分设备等给料;向破碎机、粉碎机等喂料,以及用于自动配料,定量包装等,并可用于自动控制的流程中,实现生产流程的自动化。 2、特点 电磁振动给料机是一种新型的给料设备,它和其它给产设备相比具有以下特点: (1)体积小,重量轻,结构简单,安装方便,无转动部件不需润滑,维修方便,运行费用低。 (2)电磁振运给料机由于运用了机械振动学的共振原理?双质体在低临界近共振状态下工作,因而消耗电能少。 (3)由于可以瞬时地改变和启闭料流,所以给料量有较高的精度。 (4)本系列电振机的控制设备采用了可控硅半波整流线路;,因此在使用过程中可以通过调节可控硅开放角的办法方便地无给地调节给料量,并可以实现生产流程的集中控制和自动控制。 (5)由于给料槽中的物料在给料过程中连续地被抛起,并按抛物线的轨迹向前进行跳跃运动,因此给料槽摩损较小。 (6)本系列电振机不适用于具有防爆要求的场合。 (二)结构 电磁振动给料机由以下产要部件组成(见图1) I、料槽
Ⅱ、电磁振动器(详见图2) Ⅲ、减振器 Ⅳ、控制箱 图1 电振机简图 (三)安装和调整 l、安装 (1)本系列电振机均为悬挂式安装,其中振动器的悬挂杠杆应垂直吊挂,为了减少给料机的横向摆动,给料槽悬挂吊杆应向外张开10。布置。四个悬挂吊杆吊挂在具有足够刚度的结构上,对于大型给料机为了维修和更换料槽方便,应布置移动滑架悬挂吊杆。 (2)安装时一般不受拆卸安装,安装后的给料要周围应有一定的游动间隙,使给料机处于自由状态。 (3)安装后的给料机横向应水平,以免给料机工作时物料向一侧偏移。 (4)按控制原理图进行接线,并进行接地保护。 (5)安装完的给料机在试运转前必须松开检修时用的联接叉定位螺栓,然后用螺母锁紧,参看图2。
振动给料机系列主要技术全参数
振动给料机系列主要技术参数 型号 最大 进料 粒度 (mm) 处理 能力 (t/h) 电动机 功率 (kw) 安装 倾角 (度) 总重量 (kg) 槽体尺寸 (mm) 外形尺寸 (长×宽×高)(mm) GZD-850×3000400 120 3.7×2 5 3607 850×30003110×1800×1600 GZD-1000×3600500 150 5.5×2 5 3895 1000×36003850×1950×1630 GZD-1100×4200580 240 5.5×2 5 4170 1100×42004400×2050×1660 GZD-1100×4900580 280 7.5×2 5 4520 4900×11005200×2050×1700 GZD-1300×4900650 450 11×2 5 5200 4900×13005200×2350×1750 ZSW-380×95500 96-160 11 0 4082 3800×9603920×1640×1320 ZSW-490×110630 120-280 15 0 5352 4900×11004980×1830×1320 ZSW-600×130750 400-560 22 0 7800 6000×13006082×2580×2083 注:产品性能在不断改进中,参数如有更改,恕不另行通知 ZTGL型给料机 我要订购本产 品
振动给料机主要技术参数
(mm)(t) GZD-850×3000850×3000400 120 3.0×2 3.6 5o3110×1800×1600 GZD-1000×36001000×3600500 150 3.7×2 3.9 5o3850×1850×1630 GZD-1100×42001100×4200580 240 5.5×2 4.2 5o4400×2050×1660 GZD-1100×49001100×4900580 280 7.5×2 4.5 5o5200×2050×1700 GZD-1300×49001300×4900650 450 11×2 5.2 5o5200×2350×1750注:远华机械保留更改产品设计与规格的权利,恕不另行通知。 GZG系列自同步惯性振动给料机
DEL定量给料机使用说明详解
DEL/DEM 型定量给料机V20610 (高精度一体化定量给料系统) 使 用 说 明 书
(一)、概述 DEL/DEM 型定量给料机是一种连续称量给料设备,它适用于建材、冶金、矿山、化工等行业,对散粒状物料实施连续输送,动态称量和给料控制。 DEL/DEM 型定量给料机能够按照设定的给料速率通过调节皮带速度自动调节物料流量,保证以恒定的给料速率不断地输送物料,并且自动地累积输送的总量。 DEL/DEM 型定量给料机配置有高精度一体化管理系统,通过系统键盘,串行接口或模拟量输入口设置给料速率实施控制,也可以同上位机或过程管理系统(DCS)相连接完成系统的自动控制。 DEL/DEM 型定量给料机经过精湛的制造技术和合格的质量控制体系,保证了产品的精度、品质、先进和价值,成为工业上散粒状物料配料与计量的理想设备。 (二)、规格型号 DEL/DEM 型定量给料机型号组成如下: D E × ×× ×× ×× × 减速机位置 料斗型号 滚筒中心距 皮带宽度 称体型号 电子 定料给料机 规格说明: ·称体型号:L 为轻型机,滚筒直径为190mm M 为重型机,滚筒直径为320mm
·皮带宽度:有以下规格,用两位数字表示。 06———650mm 08———800mm 10———1000mm 12———1200mm 14———1400mm 18———1800mm ·滚筒中心距:有以下规格,取前两位数字表示,例:13 表示130其规格有:1300,1500,2000,2700,3500,4000,4500mm ·料斗型号:根据物料状态特性和皮带宽度可选配T4/T6, T20 皮带速度2,皮带速度5,S1,S2 等相应型号的料斗。 ·\减速电机位置:减速电机在秤体上的安装分为左传动或右传动两种方法。区分方法:人的视线与物料输送方向一致时,若减速电机安装在秤体左侧即为左传动,若减速电机安装在秤体右侧即为右传动。 (三)、基本结构与工作原理 一、基本结构 DEL/DEM 型定量给料机由机械秤体和控制系统两大部分组成。 1、机构秤体主要包括:机架、料斗(或预给料机)、传动装置、 称量传感器、卸料罩、自动张紧器等。 ·称体机架是给料机的基础部件,它采用折弯成型的箱型结构,刚度大,稳定性好。 ·传动装置包括交流电机和减速机,减速机采用SA 型斜齿轮蜗轮蜗杆减速机,体积小,速比大,通过空心轴与主动滚筒直接联接。交流电机采用交流变频高速控制,皮带速度信号从变频器中取出。 ·称量装置由称量框架与称量托辊组成,称量框架由两组十字簧片支撑,皮带上的物料重量通过称量托辊作用到称量传感器上,
定量给料机 安全操作规程 - 制度大全
定量给料机安全操作规程-制度大全 定量给料机安全操作规程之相关制度和职责,1开机顺序及注意事项1.1开机顺序:下线设备开启后,开定量给料机;1.2停机顺序:关闭上线设备后,等物料送空后停定量给料机;1.3注意事项:1.3.1将物料送空后再停机;1.3.2启动时应将喂料量设定在... 1 开机顺序及注意事项 1.1开机顺序:下线设备开启后,开定量给料机; 1.2停机顺序:关闭上线设备后,等物料送空后停定量给料机; 1.3注意事项: 1.3.1将物料送空后再停机; 1.3.2启动时应将喂料量设定在最底; 2 开机前检查 2.1确认各处润滑油符合要求; 2.2确认皮带附近无异物; 2.3确认皮带无裂痕; 2.4确认传动机构正常、各螺栓紧固; 2.5确认安全防护装置完好。 3 运转中检查 3.1检查皮带是否跑偏,运转是否平稳; 3.2检查进、出料是否流畅,有无堵塞,及时清理以免影响计量的准确性; 3.3检查电机运转是否有异音、异振、异温; 3.4检查皮带张紧度是否合适; 3.5检查安全防护装置是否完好。 4 停机维护保养 4.1检查各轴承润滑情况、添加或更换润滑油; 4.2更换损坏的托辊,清扫传感器上的积灰; 4.3处理皮带起毛,开裂现象,必要时更换皮带; 4.4紧固各松动螺栓。 4.5检查皮带张紧度是否合适; 4.6检查传动机构的工作状态; 4.7保持安全防护装置完好。 5 常见故障与处理方法 5.1皮带跑偏:原因:下料不均匀;皮带张紧度不合适,处理方法:调整下料;调节尾轮张紧装置; 5.2计量精度达不到要求,校秤处理。 司务长职责司炉工职责司炉职责 欢迎下载使用,分享让人快乐
定量给料机巡检规程标准范本
操作规程编号:LX-FS-A39106 定量给料机巡检规程标准范本 In The Daily Work Environment, The Operation Standards Are Restricted, And Relevant Personnel Are Required To Abide By The Corresponding Procedures And Codes Of Conduct, So That The Overall Behavior Can Reach The Specified Standards 编写:_________________________ 审批:_________________________ 时间:________年_____月_____日 A4打印/ 新修订/ 完整/ 内容可编辑
定量给料机巡检规程标准范本 使用说明:本操作规程资料适用于日常工作环境中对既定操作标准、规范进行约束,并要求相关人员共同遵守对应的办事规程与行动准则,使整体行为或活动达到或超越规定的标准。资料内容可按真实状况进行条款调整,套用时请仔细阅读。 本规程适用定量给料机的日常巡检。 1.运转前的检查 1) 各加油点的油量是否充足。 2) 皮带附近无杂物。 3) 皮带清扫刮板位置是否合适。 4) 检查张紧情况是否合适。 5) 检查皮带有无裂纹。 6) 现场控制盘选择开关位置是否正确。 7) 现场仪表盘(监视器)指针处于“零”位置。 2.运转中的检查
1) 检查各处螺栓是否松动,脱落。 2) 检查皮带是否跑偏,运转是否平稳。 3) 检查物料下料口有无堵塞,卡死现象。 4) 定时检查判断物料含有效成份的波动情况。 5) 检查电机轴承等无异常发热,振动等现象。 6) 检查皮带无裂纹。 7) 检查现场仪表指针与中控是否相符。 8) 检查各传动滚筒的转动是否灵活。 3.停机后的检查 1) 经常清扫皮带轮。 2) 检查托辊外圈是否粘附粉尘团,尤其是计量一定要清扫干净,以保证计量精度。 3) 皮带张紧程度是否合适。 4) 皮带清扫器要保持完好的状态。 5) 各轴承的润滑情况。
振动式水平输送进料机
青岛农业大学海都学院 本科生毕业论文(设计) 题目:振动式水平输送进料机的设计 姓名:孙良伟 系别:工程系 专业:机械设计制造及其自动化 班级: 2009.01 学号: 200901194 指导教师:吕宝君 2013年6月8日
毕业论文(设计)诚信声明 本人声明:所呈交的毕业论文(设计)是在导师指导下进行的研究工作及取得的研究成果,论文中引用他人的文献、数据、图表、资料均已作明确标注,论文中的结论和成果为本人独立完成,真实可靠,不包含他人成果及已获得青岛农业大学或其他教育机构的学位或证书使用过的材料。与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。 论文(设计)作者签名:日期:年月日 毕业论文(设计)版权使用授权书 本毕业论文(设计)作者同意学校保留并向国家有关部门或机构送交论文(设计)的复印件和电子版,允许论文(设计)被查阅和借阅。本人授权青岛农业大学可以将本毕业论文(设计)全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本毕业论文(设计)。本人离校后发表或使用该毕业论文(设计)或与该论文(设计)直接相关的学术论文或成果时,单位署名为青岛农业大学。 论文(设计)作者签名:日期:年月日 指导教师签名:日期:年月日
目录 摘要...................................................................................................................................................................... ?Abstract .............................................................................................................................................................. П1绪论. (1) 1.1研究目的与意义 (1) 1.2 国内外发展现状 (1) 2设计方案 (3) 2.1 设计要求 (3) 2.2 方案选择与分析 (3) 3整机模型的建立 (6) 4振动输送部分的设计 (8) 4.1 结构参数的设计 (8) 4.2 运动学参数的设计 (9) 4.3 动力学参数的设计 (11) 4.4 激振部分的连杆机构设计 (12) 5传动装置的设计 (14) 5.1 选择电机 (14) 5.2 齿轮的设计..................................................................................... 错误!未定义书签。 5.3 Ⅱ轴(输出轴)的设计计算 (15) 5.4 Ⅰ轴(输入轴)的设计计算 (17) 6结论 (20) 参考文献 (21) 致谢 (22)
定量给料机安全操作规程通用版
操作规程编号:YTO-FS-PD499 定量给料机安全操作规程通用版 In Order T o Standardize The Management Of Daily Behavior, The Activities And T asks Are Controlled By The Determined Terms, So As T o Achieve The Effect Of Safe Production And Reduce Hidden Dangers. 标准/ 权威/ 规范/ 实用 Authoritative And Practical Standards
定量给料机安全操作规程通用版 使用提示:本操作规程文件可用于工作中为规范日常行为与作业运行过程的管理,通过对确定的条款对活动和任务实施控制,使活动和任务在受控状态,从而达到安全生产和减少隐患的效果。文件下载后可定制修改,请根据实际需要进行调整和使用。 1 开机顺序及注意事项 1.1开机顺序:下线设备开启后,开定量给料机; 1.2停机顺序:关闭上线设备后,等物料送空后停定量给料机; 1.3注意事项: 1.3.1将物料送空后再停机; 1.3.2启动时应将喂料量设定在最底; 2 开机前检查 2.1确认各处润滑油符合要求; 2.2确认皮带附近无异物; 2.3确认皮带无裂痕; 2.4确认传动机构正常、各螺栓紧固; 2.5确认安全防护装置完好。 3 运转中检查 3.1检查皮带是否跑偏,运转是否平稳; 3.2检查进、出料是否流畅,有无堵塞,及时清理以免影响计量的准确性;
3.3检查电机运转是否有异音、异振、异温; 3.4检查皮带张紧度是否合适; 3.5检查安全防护装置是否完好。 4 停机维护保养 4.1检查各轴承润滑情况、添加或更换润滑油; 4.2更换损坏的托辊,清扫传感器上的积灰; 4.3处理皮带起毛,开裂现象,必要时更换皮带; 4.4紧固各松动螺栓。 4.5检查皮带张紧度是否合适; 4.6检查传动机构的工作状态; 4.7保持安全防护装置完好。 5 常见故障与处理方法 5.1皮带跑偏:原因:下料不均匀;皮带张紧度不合适,处理方法:调整下料;调节尾轮张紧装置; 5.2计量精度达不到要求,校秤处理。 该位置可输入公司/组织对应的名字地址 The Name Of The Organization Can Be Entered In This Location