原子力显微镜AFM实验报告
原子力显微镜的应用和进展
摘要:从原子力显微镜诞生以来,由于其在表面观测上的高分辨率以及对表面的
要求较低,这项技术被广泛的应用于科研的各个领域,极大的促进了各学科的发展。由于这项技术的重要性,在其诞生之后就一直被改进以满足不同学科不同场合的需求。本文从具体原子力实验出发概述原子力显微镜的应用以及改进方案。
关键词:原子力显微镜 压电微悬臂 敲击式AFM 探针功能化
1 引言
1996年Binning 及其合作者在扫描隧道显微镜的基础上发明了AFM ,它是利用原子、分子间的相互作用力(主要范德瓦尔斯力,价键力,表面张力,万有引力,以及静电力和磁力等)来观察物体表面微观形貌的新型实验技术。在这项表面观测技术发明以来已经被各学科所采纳、改进,以适应不同学科不同工作环境的需求。比如在生物及医学研究中要求不能对活体细胞产生太大影响,要求力更小以免对膜有破坏作用,同时也要求原子力显微镜的扫描更快,更方便以适应更多学科对它的需求,最好能实现更好的自动化,同时最好能应用于不同的环境。但现在而言原子力显微镜对环境的要求还是很高的,所以对原子力显微镜的改进也是件十分有意义的工作。现在有的一个想法是对原子力显微镜的微悬臂进行改造,用压电微悬臂[4]替代,这样直接利用压电微悬臂收集数据以替代激光放大。另外,将原子力显微镜应用于生物和医学的研究,也提出了对探针进行功能化[5]的要求。
2 原子力实验简介
2.1 实验原理
AFM 探针和测试样品表面原子相互靠近时会产生原子间相互作用力,这种力使连接探针的微悬臂发生形变,而通过激光检测器和反馈系统调整样品在z 轴方向的位置,使得探针和样品间的作用力保持恒定,通过测量检测信号对应样品的扫描位置的变化,就可以得到测试样品表面形貌特征。通常原子力显微镜AFM 有几种运行模式:在斥力或接触模式中,力的量级为1∽10ev/
A (或910-∽810-N );在引力或非接触模式中,范德瓦耳斯力、交换力、静电力或磁力被检测。这些不能提供原子分辨率但可得到表面有关的重要信息。[1]
对于原子力显微镜,通用的工作模式有接触(AFM )和敲击式(tapping AFM )。在敲击模式中,一种恒定的驱使力使探针悬臂以一定的频率振动。当针尖刚接触
样品时,悬臂振幅会减少到某一数值。在扫描过程中,反馈回路维持悬臂振幅在这一数值恒定,亦即作用在样品上的力恒定,通过记录压电陶瓷管的移动得到样品表面形貌图。对于接触模式,由于探针和样品间的相互作用力会引起微悬臂发生形变,也就是说微悬臂的形变作为样品和针尖相互作用力的直接度量。同上述轻敲式,反馈系统保持针尖—样品作用力恒定从而得到表面形貌图。原子力显微镜是用微小探针“摸索”样品表面来获得信息,所以测得的图像是样品最表面的形貌,而没有深度信息。扫描过程中,探针在选定区域沿着样品表面逐行扫描[2]
2.2AFM的结构[1][3]
AFM的结构主要包括激光器单元、微悬臂单元、压电扫描单元和光电检测与反馈单元。如图(1)所示:
图一 AFM的组成部件
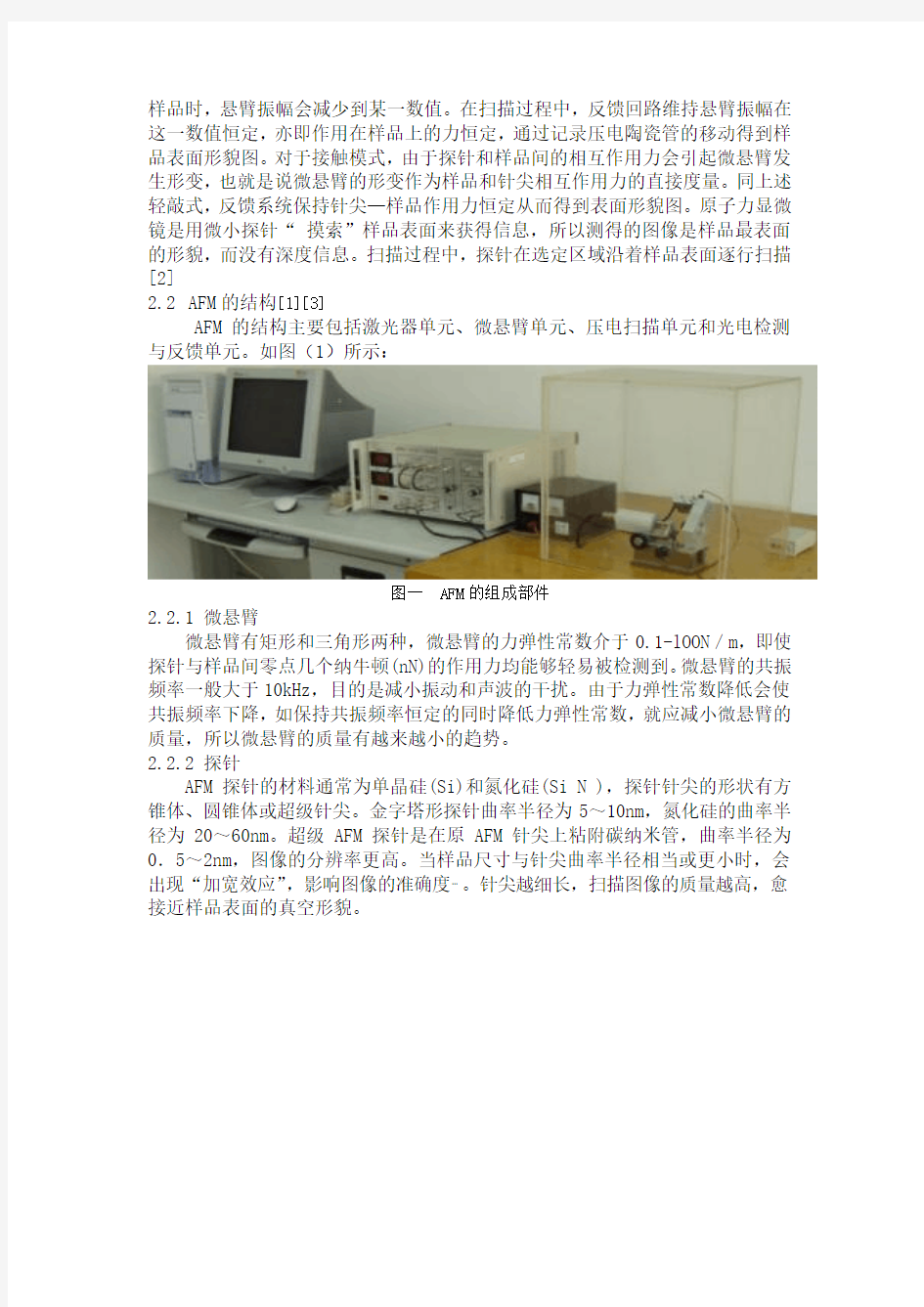
2.2.1 微悬臂
微悬臂有矩形和三角形两种,微悬臂的力弹性常数介于0.1-lOON/m,即使探针与样品间零点几个纳牛顿(nN)的作用力均能够轻易被检测到。微悬臂的共振频率一般大于10kHz,目的是减小振动和声波的干扰。由于力弹性常数降低会使共振频率下降,如保持共振频率恒定的同时降低力弹性常数,就应减小微悬臂的质量,所以微悬臂的质量有越来越小的趋势。
2.2.2 探针
AFM探针的材料通常为单晶硅(Si)和氮化硅(Si N ),探针针尖的形状有方锥体、圆锥体或超级针尖。金字塔形探针曲率半径为5~10nm,氮化硅的曲率半径为20~60nm。超级AFM探针是在原 AFM针尖上粘附碳纳米管,曲率半径为0.5~2nm,图像的分辨率更高。当样品尺寸与针尖曲率半径相当或更小时,会出现“加宽效应”,影响图像的准确度?。针尖越细长,扫描图像的质量越高,愈接近样品表面的真空形貌。
图二 AFM控制机箱及面板示意图
2.3实验操作步骤[3]
(1)AFM仪器开机
电源与控制机箱连接线等已无误,不需确认。依次打开计算机电源、机箱低压电源、高压电源、激光器电源等。
(2)样品——探针进给
样品进给提供粗调和细调两种进给机构。先用粗调进给样品至约离探针1mm 左右,再用细调机构,一边缓慢进给样品,一边观察PSD位置的光斑有变化,这时说明已接近进入反馈状态,接着观察反馈信号,更缓慢地进给样品,直至PSD 信号显示为1.600左右,Z反馈信号在-200~-300左右。注意这时不能再移动粗调和细调进给机构。接下来下面的操作让计算机控制系统自动调整和保持样品与探针之间的间距。
(3) 样品扫描
运行计算计扫描程序,根据需要设置扫描参数。单次扫描时间设定约15s 左右,进入扫描工作状态。
(4) 图象显示与存储
扫描过程自动进行,图像以逐行显示的方式显示。在不改变扫描参数的情况下,扫描在同一区域循环重复进行。也可根据需要改变扫描区域和扫描范围。对于满意的图象,可随时将图像捕获存储。存储时,计算机自动保存图像信息和扫描参数信息。
(5) 退出扫描
如已获得理想的图像,不再做另外扫描,可按“退出”键退出扫描程序,用细调缓慢退移样品,直到Z反馈信号在500以上,并将细调进给机构退移到底,退移粗调。
(6) AFM仪器关机
当不再进行样品扫描实验时,依次关闭激光器电源、高压电源、机箱低压电
源等。
(7) 用配套软件对图像进行平面显示和立体显示
可实现图像的裁剪、平滑、旋转、添加色彩、加注标尺等,并可调整图像的
色调、对比度和亮度等。如图(3—5)为多孔氧化铝正面结构材料的AFM图像,
图3—6为多孔氧化铝背面结构材料的AFM图像。
3 实验结果
实验得到的样品扫描图样如下图所示:
图3.11 样品扫描图样(1) 图3.12 放大三维立体图(1)
图3.21 样品扫描图样(2)图3.22 样品扫描的三维图样(2)
图3.31 样品扫描图样(3)图3.32 样品扫描的三维图样(3)
4结果分析
本实验是个操作要求较高的实验,要花时间才能做得好,由于时间也很有限,所
以本次试验的目的也不是一定也做出多好的成绩,关键在于锻炼一下基本操作,
同时通过查找资料更广泛的了解AFM的构造以及制造、在不同学科上的应用这些
方面来扩充视野倒是不无裨益的。
5 实验改进
5.1 微悬臂的改进
可以考虑采用压电微悬臂,用压电微悬臂采集信号,这样就可免去调节激光
的麻烦,而且可以使得实验更加简便,实验装置更为简单。[4]另外对于微悬臂
的材料也可以加以改进,使其具有更好的性能。如最近有人提出了用钨代替SiO2
的方法:采用STM微位移检测装置,用很细(而弹性又好的钨丝制作简易又适用
的新型微悬臂和针尖,可大大降低了微悬臂的制作成本,在碱溶液中,采用低压
交流电化学腐蚀法,使钨丝尖部达到接近只有一个原子,即使碰撞后也只需腐蚀
一下又可以继续使用。[7]
5.2 采用敲击模式
采用敲击式原子力显微镜。在敲击模式中,一种恒定的驱使力使探针悬臂以
一定的频率振动。当针尖刚接触样品时,悬臂振幅会减少到某一数值。在扫描过
程中,反馈回路维持悬臂振幅在这一数值恒定,亦即作用在样品上的力恒定,通
过记录压电陶瓷管的移动得到样品表面形貌图对于接触模式,由于探针和样品间
的相互作用力会引起微悬臂发生形变,也就是说微悬臂的形变作为样品和针尖相
互作用力的直接度量。同上述轻敲式,反馈系统保持针尖—样品作用力恒定从而
得到表面形貌图[2]
5.3 AFM在生物、医学上的应用——探针功能化
作为最基础的学科,物理的发展往往能极大的推动其他学科的发展,很多的
工程、生物、医学、化学的发展都得益于物理学探测技术的发展。事实已经证明,
AFM技术是物理学对于人类对微观世界探索的有一大具里程碑意义的成就。
1986年 Binning及其合作者在扫描隧道显微镜 (scanning tunneling
microscope,STM)的基础上发明了 AFM,其卓越的高分辨率(0.5~1 nm)和能保持样品生理状态的制样方法,使研究人员能在生理条件下直接观察到高分辨率的生物样品表面结构。[6]
探针功能化是指通过化学或生物方法将各种生物分子固定在AFM的探针上。探针功能化使 AFM在力学测定功能之上又具备了分子识别能力,成为探测生物分子相互作用的有力工具。[5]
近年来,AFM在提高分辨率、探针制作、探针功能化、样品制备和图像数据分析等方面取得了突飞猛进的发展。这些技术进步实现了在生理条件下直接观测生物单分子和在纳米尺度上直接操作生物单分子 ]。特别是以功能化探针为基础的黏附力成像和动态识别成像将 AFM具备的力谱测定和高分辨率成像能力与单分子问识别的特异性有机结合,实现了生物样品表面单分子定位、基于单分子识别的成像和样品组分探测。AFM力谱技术(force spectroscopy)可在生理条件下进行单分子水平的作用力谱分析,实现分子间作用力及其动态变化的实时测定。AFM是目前惟一能在纳米尺度上进行生物膜表面单分子作用力学测定的仪器[5].
在所有的这些进步中,最为重要且意味深远的成果便是将探针功能化,通过探针的功能化,AFM的作用已经不仅仅局限于探测表面的形状,还可用于进行更多方面的研究,如测量DNA之间的结合力、蛋白质配体和受体的结合等。
参考文献:
[1] 王宝玉,何北海,李军荣,孟云兰.原子力显微镜在制浆造纸研究中的应用.Paper
Science& Technology,2010 Vo1.29 No.4.
[2] 刘岁林, 田云飞,陈红,吉晓江.原子力显微镜原理与应用技术. 现代仪器, 2006年第六
期
[3]近代物理讲义,浙江大学,ftp://10.71.23.250
[4]包定华,张良莹,姚熹. 压电微悬臂在原子力显微镜中的应用. 压电与声光,1 998年8
月第2D卷第4期
[5]陈建敏,杨拯,何彦芳. 基于原子力显微镜的单分子探测技术及其在医学研究中的应用.
重庆医学2010年7月第39卷第14期
[6]Dufrene YF,Hinterdorfer P.Recent progress in AFM molecular recognition
studies[J].Pflugers Arch,2008,456(1)
[7] 彭光含,杨学恒,刘济春,李旭,辛洪政.一种高精度多功能双用原子力显微镜技术及应
用. 仪器仪表学报, 2008年1月第29卷第1期.
原子力显微镜 XE-100 AFM
XE-100 High Accuracy Small Sample SPM PSIA
XE-100 Superior Imaging Solution Anodized Aluminum Surface (0.5×0.5 μm )(Sample Courtesy of Prof. J.K. Lee, Seoul National University.) Steel Surface (10×10 μm )STI Patterns on Photomask (5×5 μm ) Self Assembled Monolayers (10×10 μm ) MFM Image of Hard Disk (30×30 μm ) >>>>>Semiconductors Data Storage & Magnetic Materials Biotechnology & Life Sciences Plastics & Polymers Materials & Surface Characterizations Wide Range of Applications NC-AFM Image of porous Polymer (6×6 μm ) XE system produces higher quality images faster . Z scanner of the XE system has a resonance frequency significantly higher than those of conventional piezoelectric tube scanners. The result is greater feedback performance and faster and more accurate data acquisition. Also, since z scanner is physically separated from x-y scanner , there is no coupling between the x-y plane and the z scanner.
原子力显微镜实验报告
原子力显微镜实验报告 原子力显微镜应用技术 一、实验目的 1了解原子力显微镜的工作原理 2掌握用原子力显微镜进行表面观测的方法 二、实验原理 (1)AFM的工作原理 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、 反馈系统。主要工作原理如下图:
原子力显微镜的工作原理图 (2)A FM的工作模式 AFM有三种不同的工作模式:接触模式(contact mode) 、非接触模式 (noncontact mode) 和共振模式或轻敲模式(Tapping Mode) 本实验采用轻敲模式:样品扫描时,针尖始终同样品“接触”,即针尖-样品距离在小于零点几个纳米的斥力区域。此模式通常产生稳定、高分辨图像。当沿着样品扫描时,由于表面的高低起伏使得针尖-样品距离发生变化,引起它们之间作用力的变化,从而使悬臂形变发生改变。当激光束照射到微悬臂的背面,再反射到位置灵敏的光电检测器时,检测器不同象限会接收到同悬臂形变量成一定的比例关系的激光强度差值。反馈回路根据检测器的信号与预置值的差值,不断调整针尖一样品距离,并且保持针尖一样品作用力不变,就可以得到表面形貌像。 三、实验仪器及试剂 试剂及材料:石墨烯溶液,云母片
仪器:nano scope 5.31r 四、步骤 依次按下面步骤开启实验仪器: 1.开机:先开电脑再开主控制器 2.打开程序:Nanoscope: 3.安装样品:用双面胶带将云母片粘到圆形铁片上,再将其放置到样品 台上。调节中部拨钮UP控制样品台降低到样品上表面低于样品台两侧的圆球。 4.安装探针:用镊子小心将探针安装到HOLDE中。 5.安装HOLDER调节样品台后面的旋钮,把HOLDE固定紧; 调节拨钮DOW使样品台尽量接近探针针尖; 将激光调至针尖处,同时屏幕的SUM直最大;调节样品台后面横型旋钮,用于控制样品室中的反射镜子,调节旋钮使屏幕上的SUM直最大;调节样品台上面和后面的两个旋钮,使屏幕上VERT和HORZ匀为0左右;将光敏检测器旋至最小;将左边拨钮拨至 on ; 7.开始测试:控制面板左上: (1)T UNE:弹出对话框,点击下方Auto Tune自动调节,完成之后,点击Exit 退出。 (2)下针:弹出表单,表单消失后,自动开始扫描SCAN (3)Capture : Capture file name ,弹出对话框,对图像命名,并选择保 存路径。
原子力显微镜的原理及使用
原子力显微镜的原理及使用 通过近代物理实验课的学习,了解了许多仪器的工作原理以及使用方法,对今后的科研学习有很大的 帮助。其中原子力显微镜就是其中之一,对于做材料方面的专业来说,原子力显微镜在表征物质的表面结 构及性质起着重要的作用。前段时间我们利用AFM对用RF磁控溅射制备的PZT薄膜进行了表征,通过对AFM的使用并查找相关文献,使我对原子力显微镜有了更加深刻的认识。 原子力显微镜,英文:Atomic Force Microscope ,简写: AFM。是一种利用原子,分子间的相互作用力来观察物体表面微观 形貌的新型实验技术.它有一根纳米级的探针,被固定在可灵敏操 控的微米级弹性悬臂上.当探针很靠近样品时,其顶端的原子与样 品表面原子间的作用力会使悬臂弯曲,偏离原来的位置.根据扫描 样品时探针的偏离量或振动频率重建三维图像.就能间接获得样品 表面的形貌或原子成分。 它主要由带针尖的微悬臂、微悬臂运动检测装置、监控其运 动的反馈回路、使样品进行扫描的压电陶瓷扫描器件、计算机控 制的图像采集、显示及处理系统组成。微悬臂运动可用如隧道电 流检测等电学方法或光束偏转法、干涉法等光学方法检测,当针 尖与样品充分接近相互之间存在短程相互斥力时,检测该斥力可获得表面原子级分辨图像,一般情况下分 辨率也在纳米级水平。AFM测量对样品无特殊要求,可测量固体表面、吸附体系等。 一、仪器结构: 在原子力显微镜(Atomic Force Microscopy,AFM)的系统中,可分成三个部分:力检测部分、位置 检测部分、反馈系统。 1、力检测部分 在原子力显微镜(AFM)的系统中,所要检测的力是原子与原子之间的范德华力。所以在本系统中是 使用微小悬臂(cantilever)来检测原子之间力的变化量。微悬臂通常由一个一般100~500μm长和大约500nm~5μm厚的硅片或氮化硅片制成。微悬臂顶端有一个尖锐针尖,用来检测样品-针尖间的相互作用力。这微小悬臂有一定的规格,例如:长度、宽度、弹性系数以及针尖的形状,而这些规格的选择是依照样品 的特性,以及操作模式的不同,而选择不同类型的探针。 2、位置检测部分 在原子力显微镜(AFM)的系统中,当针尖与样品之间有了交互作用之后,会使得悬臂cantilever摆动,所以当激光照射在微悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量 的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作 信号处理。 3、反馈系统 在原子力显微镜(AFM)的系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作 反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷管制作的扫描器做适当的移动,以保持样品与针 尖保持一定的作用力。 AFM系统使用压电陶瓷管制作的扫描器精确控制微小的扫描移动。压电陶瓷是一种性能奇特的材料, 当在压电陶瓷对称的两个端面加上电压时,压电陶瓷会按特定的方向伸长或缩短。而伸长或缩短的尺寸与 所加的电压的大小成线性关系。也就是说,可以通过改变电压来控制压电陶瓷的微小伸缩。通常把三个分 别代表X,Y,Z方向的压电陶瓷块组成三角架的形状,通过控制X,Y方向伸缩达到驱动探针在样品表面 扫描的目的;通过控制Z方向压电陶瓷的伸缩达到控制探针与样品之间距离的目的。 原子力显微镜(AFM)便是结合以上三个部分来将样品的表面特性呈现出来的:在原子力显微镜(AFM)的系统中,使用微小悬臂(cantilever)来感测针尖与样品之间的相互作用,这作用力会使微悬臂摆动, 再利用激光将光照射在悬臂的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测 器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性 以影像的方式给呈现出来。 二、工作原理: 将一个对微弱力极敏感的微悬臂一端固定,另一端有一微小的针尖,针尖与样品表面轻轻接触,由于 针尖尖端原子与样品表面原子间存在极微弱的排斥力,通过在扫描时控制这种力的恒定,带有针尖的微悬 臂将对应于针尖与样品表面原子间作用力的等位面而在垂直于样品的表面方向起伏运动。利用光学检测法
扫描隧道显微镜实验报告
一、实验目的 1.采用探针扫描显微镜进行微纳米级表面形貌测量。 2.了解扫描探针显微镜的工作原理并熟悉原子力显微镜的操纵。 二、实验设备 原子力显微镜、光盘块、装有SPM Console在线控制软件和Image后处理软件的计算机。 三、实验基础 原子力显微镜(Atomic Force Microscope ,AFM),一种可用来研究包括绝缘体在内的固体材料表面结构的分析仪器。 原子力显微镜的基本原理是:将一个对微弱力极敏感的微悬臂一端固定,另一端有一微小的针尖,针尖与样品表面轻轻接触,由于针尖尖端原子与样品表面原子间存在极微弱的排斥力,通过在扫描时控制这种力的恒定,带有针尖的微悬臂将对应于针尖与样品表面原子间作用力的等位面而在垂直于样品的表面方向起伏运动。利用光学检测法或隧道电流检测法,可测得微悬臂对应于扫描各点的位置变化,从而可以获得样品表面形貌的信息。激光检测原子力显微镜(Atomic Force Microscope Employing Laser Beam Deflection for Force Detection, Laser-AFM)——扫描探针显微镜家族中最常用的一种为例,其工作原理如图1所示。二极管激光器(Laser Diode)发出的激光束经过光学系统聚焦在微悬臂(Cantilever)背面,并从微悬臂背面反射到由光电二极管构成的光斑位置检测器(Detector)。在样品扫描时,由于样品表面的原子与微悬臂探针尖端的原子间的相互作用力,微悬臂将随样品表面形貌而弯曲起伏,反射光束也将随之偏移,因而,通过光电二极管检测光斑位置的变化,就能获得被测样品表面形貌的信息。 在系统检测成像全过程中,探针和被测样品间的距离始终保持在纳米(10e-9米)量级,距离太大不能获得样品表面的信息,距离太小会损伤探针和被测样品,反馈回路(Feedback)的作用就是在工作过程中,由探针得到探针-样品相互作用的强度,来改变加在样品扫描器垂直方向的电压,从而使样品伸缩,调节探针和被测样品间的距离,反过来控制探针样品相互作用的强度,实现反馈控制。因此,
AFM原子力显微镜技术及应用实验报告
AFM原子力显微镜技术及应用实验报告 ——指导老师:袁求理 近 代 物 理 实 验 报 告 物理班实验小组 2012年12月18日
引言 在当今的科学技术中,如何观察、测量、分析尺寸小于可见光波长的物体,是一个重要的研究方向。扫描隧道显微镜(STM) 使人们首次能够真正实时地观察到单个原子在物体表面的排列方式和与表面电子行为有关的物理、化学性质。 STM 要求样品表面能够导电,从而使得STM只能直接观察导体和半导体的表面结构。为了克服STM 的不足之处,推出了原子力显微镜(AFM)。AFM是通过探针与被测样品之间微弱的相互作用力(原子力) 来获得物质表面形貌的信息。因此,AFM除导电样品外,还能够观测非导电样品的表面结构,且不需要用导电薄膜覆盖,其应用领域将更为广阔。除物理,化学生物等领域外,AFM在为微电子,微机械学,新型材料,医学等领域有着广泛的应用,以STM和AFM为基础,衍生出一系列的扫描探针显微镜,有激光里显微镜,磁力显微镜,扫描探针显微镜主要用于对物质表面在纳米线上进行成像和分析。 一、实验组员: 邵孙国(10072127)、周柬辉(10072137)、陈俊峰(10072122)、任寿良(10072126)。 二、实验目的: Ⅰ、学习和了解AFM的结构和原理。 Ⅱ、掌握AFM的操作和调试过程,并以之来观察样品表面的形貌。 Ⅲ、学习用计算机软件来处理原始数据图像。 三、实验原理简析: 1. AFM基本原理 原子力显微镜的工作原理就是将探针装在一弹性微悬臂的一端,微悬臂的另一端固定,当探针在样品表面扫描时,探针与样品表面原子间的排斥力会使得微悬臂轻微变形,这样,微悬臂的轻微变形就可以作为探针和样品间排斥力的直接量度。一束激光经微悬臂的背面反射到光电检测器,可以精确测量微悬臂的微小变形,这样就实现了通过检测样品与探针之间的原子排斥力来反映样品表面形貌和其他表面结构。 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。如图一显示。
原子力显微镜
原子力显微镜 一、实验目的 1了解原子力显微镜的工作原理 2掌握用原子力显微镜进行表面观测的方法 二、实验原理 1. AFM基本原理 原子力显微镜的工作原理就是将探针装在一弹性微悬臂的一端,微悬臂的另一端固定,当探针在样品表面扫描时,探针与样品表面原子间的排斥力会使得微悬臂轻微变形,这样,微悬臂的轻微变形就可以作为探针和样品间排斥力的直接量度。一束激光经微悬臂的背面反射到光电检测器,可以精确测量微悬臂的微小变形,这样就实现了通过检测样品与探针之间的原子排斥力来反映样品表面形貌和其他表面结构。 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。如图一显示。 1)力检测部分 在原子力显微镜系统中,所要检测的力是原子与原子之间的范德华力。使用微悬臂来检测原子之间力的变化量。如图2所示,微悬臂通常由一个一般100~500μm长和大约500nm~5μm厚的硅片或氮化硅片制成。微悬臂顶端有一个尖锐针尖,用来检测样品-针尖间的相互作用力。 (2)位置检测部分 在原子力显微镜系统中,当针尖与样品之间有了作用之后,会使得悬臂摆动,所以当激光照射在微悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理。聚焦到微悬臂上面的激光反射到激光位置检测器,通过对落在检测器四个象限的光强进行计算,可以得到由于表面形貌引起的微悬臂形变量大小,从而得到样品表面的不同信息。 (3)反馈系统 在原子力显微镜系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷制作的扫描器做适当的移动,以保持样品与针尖保持一定的作用力。 2.AFM 有三种不同的工作模式: 接触模式( contact mode) 、非接触模式(noncontact mode) 和共振模式或轻敲模式(Tapping Mode) 。(1)接触模式: 从概念上来理解,接触模式是AFM最直接的成像模式。AFM 在整个扫描成像过程之中,探针针尖始终与样品表面保持亲密的接触,而相互
原子力显微镜的工作原理及基本操作
2015年秋季学期研究生课程考核 (读书报告、研究报告) 考核科目:原子力显微镜的工作原理及基本操作学生所在院(系): 学生所在学科: 学生姓名: 学号: 学生类别:应用型 考核结果阅卷人
原子力显微镜的工作原理及基本操作 一、实验目的 1.了解原子力显微镜的工作原理 2.掌握用原子力显微镜进行表面观测的方法 二、原子力显微镜结构及工作原理 2.1 AFM的工作原理 AFM是用一个一端装有探针而另一端固定的弹性微悬臂来检测样品表面信息的,当探针扫描样品时,与样品和探针距离有关的相互作用力作用在针尖上,使微悬臂发生形变。AFM系统就是通过检测这个形变量,从而获得样品表面形貌及其他表面相关信息 1.原子力作用机制 当两个物体的距离小到一定程度的时候,它们之间将会有原子力作用.这个力主要与针尖和样品之间的距离有关.从对微悬臂形变的作用效果来分,可简单将其分为吸引力和排斥力,它们分别在不同的工作模式下、不同的作用距离起主导作用.探针与样品的距离不同,作用力的大小也不相同,针尖/样品距离曲线如图1所示. 图1 针尖/样品距离曲线 2.原子力显微镜的成像原理 AFM的微悬臂绵薄而修长,当对样品表面进行扫描时,针尖与样品之间力的作用会使微悬臂发生弹性形变,针尖碰到样品表面时,很容易弹起和起伏,它非常的灵敏,极小的力的作用也能反应出来.也就是说如果检测出这种形变,就可以知道针尖-样品间的相互作用力,从而得知样品的形貌。
图2 光束偏转法的原理图 微悬臂形变的检测方法一般有电容、隧道电流、外差、自差、激光二极管反馈、偏振、偏转方法。偏转方法是采用最多的方法,也是原子力显微镜批量生产所采用的方法.图2就是光束偏转法的原理图。 3.原子力显微镜的工作模式 AFM主要有三种工作模式:接触模式(ContactMode)、非接触模式(Non-contact Mode)和轻敲模式( Tapping Mode),如图3. 图3 三种工作模式 接触模式中,针尖一直和样品接触并在其表面上简单地移动.针尖与样品间的相互作用力是两者相接触原子间的排斥力,其大小约为10-8~10-11N。 非接触模式是控制探针一直不与样品表面接触,让探针始终在样品上方5~20nm 距离内扫描.因为探针与样品始终不接触,故而避免了接触模式中遇到的破坏样品和污染针尖的问题,灵敏度也比接触式高,但分辨率相对接触式较低,且非接触模式不适合在液体中成像。 轻敲模式是介于接触模式和非接触模式之间新发展起来的成像技术,类似与非接触模式,但微悬臂的共振频率的振幅相对非接触模式较大,一般在0.01~1nm.分辨率几乎和接触模式一样好,同时对样品的破坏也几乎完全消失,克服了以往常规模式的局限。 4.原子力显微镜的构成 SPA-300HV型显微镜主要包括以下四个系统: 减震系统、头部系统、电子学控制系统、计算机软件系统(图4为结构图)。
材料分析实验报告合辑 --浙江师范大学 材料物理系
浙江师范大学Zhejiang normal university 论文 作者: 专业: 完成日期:2013年12月21日
第一元素 实验 实验一 XRD 衍射 一、实验目的 1. 了解X 射线衍射仪的结构及工作原理 2. 熟悉X 射线衍射仪的操作 3. 掌握运用X 射线衍射分析软件进行物相分析的方法 二.X 衍射原理: X 射线在晶体中的衍射现象,实质上是大量的原子散射波互相干涉的结果。 晶体所产生的衍射花样都反映出晶体内部的原子分布规律。概括地讲,一个衍射花样的特征,可以认为由两个方面的内容组成: 一方面是衍射线在空间的分布规律,(称之为衍射几何),衍射线的分布规律是晶胞的大小、形状和位向决定 另一方面是衍射线束的强度,衍射线的强度则取决于原子的品种和它们在晶胞中的位置。 X 射线衍射理论所要解决的中心问题: 在衍射现象与晶体结构之间建立起定性和定量的关系。 布拉格方程: λθn dSin =2 根据布拉格方程,Sin θ不能大于1, 因此:对衍射而言,n 的最小值为1,所以在任何可观测的衍射角下,产生衍射的条件为λ<2d ,这也就是说,能够被晶体衍射的电磁波的波长必须小于参加反射的晶面中最大面间距的二倍,否则不能产生衍射现象。 若将布拉格方程中的n 隐含在d 中得到简化的布拉格方程: λθλθ===Sin d n d d Sin n d HKL hkl HKL hkl 2,2 则有:令 把(hkl )晶面的n 级反射看成为与(hkl )晶面平行、面间距为(nh,nk,nl) 的晶面的一级反射。面间距为dHKL 的晶面并不一定是晶体中的原子面,而是为了简化布拉格方程所引入的反射面,我们把这样的反射面称为干涉面。干涉面的面指数称为干涉指数。 三、使用仪器、材料 XRD ,带测试的未知材料
南京大学-原子力显微镜实验报告
南京大学-原子力显微镜实验报告
原子力显微镜实验报告 一.实验目的 1.了解原子力显微镜的工作原理 2.掌握用原子力显微镜进行表面观测的方法 二.实验原理 1.AFM工作原理 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。在AFM中用一个安装在对微弱力极敏感的微悬臂上的极细探针。当探针与样品接触时,由于它们原子之间存在极微弱的作用力(吸引或排斥力) ,引起微悬臂偏转。扫描时控制这种作用力恒定,带针尖的微悬臂将对应于原子间作用力的等位面,在垂直于样品表面方向上起伏运动, 因而会使反射光的位置改变而造成偏移量,通过光电检测系统(通常利用光学、电容或隧道电流方法)
对微悬臂的偏转进行扫描,测得微悬臂对应于扫描各点的位置变化, 此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整。将信号放大与转换从而得到样品表面原子级的三维立体形貌图像。AFM 的核心部件是力的传感器件, 包括微悬臂(Cantilever) 和固定于其一端的针尖。根据物理学原理,施加到Cantilever末端力的表达式为: =? F K Z ?表示针尖相对于试样间的距离, K为Cantilever的弹性Z 系数,力的变化均可以通过Cantilever被检测。 AFM 有三种不同的工作模式:接触模式、非接触模式和共振模式或轻敲模式。本实验采用接触模式:样品扫描时,针尖始终同样品“接触”,即针尖-样品距离在小于零点几个纳米的斥力区域。此模式通常产生稳定、高分辨图像。当沿着样品扫描时,由于表面
的高低起伏使得针尖-样品距离发生变化,引起它们之间作用力的变化,从而使悬臂形变发生改变。当激光束照射到微悬臂的背面,再反射到位置灵敏的光电检测器时,检测器不同象限会接收到同悬臂形变量成一定的比例关系的激光强度差值。反馈回路根据检测器的信号与预置值的差值,不断调整针尖一样品距离,并且保持针尖一样品作用力不变,就可以得到表面形貌像。 2.粗糙度的概念 表面粗糙度是反映零件表面微观几何形状误差的一个重要指标。表面粗糙度的评定参数很多,这里选用轮廓算数平均偏差Ra,微观不平度十点高度Rz,轮廓最大高度Ry作为系统纳米粗糙度测量的三个轮廓高度评定参数。 轮廓算数平均偏差Ra为取样长度内轮廓偏距绝
原子力显微镜使用说明书
SII 操作说明书 Nanopics NPX100M001 原子力显微镜 湖南大学机械与汽车精密制造工程实验室翻译
1.1版本 1999年11月 1.2版本 2000年9月 在使用该仪器之前请认真阅读该操作手册并按里面的说明操作。把该说明书放置在仪器旁边,当遇到仪器操作的问题时请参考之。 该产品的技术受国际交易控制法和国际贸易控制法的保护,未经日本政府权威机构的书面允许不得泄漏。 ?1999,2000日本精工Seiko公司。所有的权利都受保护 未经许可不得复制该手册 该说明书内容改变不再通知
前言 感谢您选择了Nanopics产品。该手册为使用注意事项和指导说明,将有助于您安全地使用本仪器,为了充分发挥该仪器的功能,请务必彻底地阅读操作说明书,必要时参考该说明书。 用途 在操作该仪器之前请仔细阅读说明书的安全指南和警告标志,并按照说明书及仪器上所示的注意事项操作,以获得一个安全的使用环境。 保修 该仪器的保修期为从交货之日起一年内。在该期间内提供免费保修,但由于不按操作说明书操作而产生的损坏除外。保修内容的详细信息请参阅5.4节的保修部分。 用户登记 为了方便使SII向您提供软件不断升级及维护服务通知,请返回Nanopics用户信息。在该说明书内有一张用户登记卡,请按卡上的传真号码寄回。若不寄回该卡则可能对该仪器的升级信息的通知及免费维修等带来不便,故建议您及时寄回。
安全指导 为了正确使用该仪器,请注意以下事项 1.在操作之前参考主要设备及附件的操作说明书,按照说明书上的指导要求操作,可保证操作的安全简便。 2.请把操作说明及安全指导书放在仪器旁边,以便于参考。 3.请注意仪器上的所有警告标志,参考后续部分的警告栏信息。 4.该仪器通过三根插线接地,为了避免触电请不要随意乱动或拔下接地线。 5.在修理设备的任何部件之前,请关掉所有的电源。 6.为了防止温升,在腔内置有通风冷却扇,请不要取下或阻碍其运转。 7.为了避免触电类事件发生,请不要把您的手或身体其他部分靠近仪器的开关,特别是通风部分。 8.请把仪器放置在稳定的位置。 9.不要在粉尘过多或温度过高的环境中使用该仪器。 10.不要改置改仪器,除非特殊情况下向SII代理商请求被许可或者在警告栏的指导下。打开或除去罩子会产生大量的电流,从而发生危险事件,如漏电或着火。
教育部《基础课实验教学示范中心》建设标准(讨论稿)
教育部《基础课实验教学示范中心》建设标准(讨论稿) 一、体制与管理 1、基础课实验教学示范中心(以下简称“中心”)属于校级实验中心,建制相对独立。中心实施校、院(系)两级管理,全面负责本科学生基础课实验教学工作。 2、学校负责中心的建设,提供其正常运转、维修及更新经费,教育部必要时给予支持。 3、中心实行主任负责制,主任由学校任免。中心实行人才流动、竞争上岗、定期考核的管理机制。 4、中心除承担学校本科基础课实验教学工作外,同时开展实验教学课程体系、内容、理论和技术方法、手段的研究,负责人员培训并提供开放服务。 5、中心向校内外开放,对外服务的收入可作为运行经费的补贴。 6、中心应具备先进的多媒体开放实验教学软硬件环境,实现实验教学、基本工作信息和仪器设备的计算机网络化管理,可作为向全国院校提供资源的网站和网络系统。 7、中心必须贯彻《高等学校实验室工作规程》(国家教委主任20号令),执行《高等学校仪器设备管理办法》(教高[2000]9号文件),在按照《高等学校基础课教学实验室评估办法和标准表》(教备[1995]33号文件),在按照《高等学校基础课教学实验室评估验收的基础上申请作为“基础课实验教学示范中心”,教育部经组织专家组审查认定后,授予“教育部基础课实验教学示范中心”称号。之后每四年复查一次,审查不合格的将取消资格。 二、实验教学 1、实验课程体系 实验课程同理论课程一样,是构成高等学校课程教学的重要组成部分。中心的基础课实验教学原则上应独立设课并形成完整、科学的实验教学课程体系。 中心应按照新世纪经济建设和社会发展对高素质人才培养的需求,在综合各个层次实验内容的基础上,建立相关内容融合、贯通和渗透,形成科学的相互联系的实验教学课程新体系。中心通过科学的设置实验项目,全面培养学生的实验技能、综合分析和解决问题的能力,使学生具有创新精神和实践能力。 2、实验教学项目 实验教学应包括以下几个层次: 基本实验教学; 提高型实验教学(综合性、设计性等); 研究创新型实验教学。 其中,基本实验项目应根据学科的不同占到所开实验项目的50%左右。 3、实验教学方法
原子力显微镜实验报告-南京大学
南京大学物理系实验报告 题目实验10.5 原子力显微镜 姓名朱瑛莺2014年3月14日学号111120230 一、引言 以光学显微镜、电子显微镜、扫描隧道显微镜为代表的一系列先进显微技术的出现与应用,为人类科技和社会进步做出了巨大贡献。1986 年,IBM 公司的G.Binning 和斯坦福大学的C.F.Quate 及C. Gerber 合作发明的原子力显微镜(Atomic Force Microscope, AFM)[1]更是突出地显现了显微观测技术作为人类视觉感官功能的延伸与增强的重要性,它是在扫描隧道显微镜基础上为观察非导电物质经改进而发展起来的分子和原子级显微工具。对比于现有的其它显微工具,原子力显微镜以其高分辨、制样简单、操作易行等特点而备受关注,并已在生命科学、材料科学等领域发挥了重大作用,极大地推动了纳米科技的发展,促使人类进入了纳米时代。 二、实验目的 1.了解原子力显微镜的工作原理。 2.初步掌握用原子力显微镜进行表面观测的方法。 三、实验原理 1.AFM (1)AFM的工作原理
在AFM中用一个安装在对微弱力极敏感的微悬臂上的极细探针。当探针与样品接触时,由于它们原子之间存在极微弱的作用力(吸引或排斥力) ,引起微悬臂偏转。扫描时控制这种作用力恒定,带针尖的微悬臂将对应于原子间作用力的等位面,在垂直于样品表面方向上起伏运动, 因而会使反射光的位置改变而造成偏移量,通过光电检测系统(通常利用光学、电容或隧道电流方法) 对微悬臂的偏转进行扫描,测得微悬臂对应于扫描各点的位置变化, 此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整。将信号放大与转换从而得到样品表面原子级的三维立体形貌图像。 AFM 的核心部件是力的传感器件, 包括微悬臂(Cantilever) 和固定于其一端的针尖。根据物理学原理,施加到Cantilever 末端力的表达式为: F = KΔZ ΔZ 表示针尖相对于试样间的距离, K 为Can2tilever 的弹性系数,力的变化均可以通过Cantilever 被检测。 (2)AFM关键部位: AFM关键部份是力敏感元件和力敏感检测装置。所以微悬臂和针尖是决定AFM灵敏度的核心。为了能够准确地反映出样品表面与针尖之间微弱的相互作用力的变化,得到更真实的样品表面形貌,提高AFM 的灵敏度,微悬臂的设计通常要求满足下述条件: ①较低的力学弹性系数,使很小的力就可以产生可观测的位移; ②较高的力学共振频率; ③高的横向刚性,针尖与样品表面的摩擦不会使它发生弯曲; ④微悬臂长度尽可能短;⑤微悬臂带有能
扫描隧道显微镜实验报告
扫描隧道显微镜实验报告 武晓忠201211141046 指导教师:何琛娟 【摘 要】: 通过用扫描隧道显微镜对石墨的表面形貌进行观测,加深对扫描显微镜的工作原理的了解、熟悉扫描显微镜的使用步骤和注意事项。以及了解在测量时对图像影响的因素。 【关键词】: 扫描隧道、针尖、隧道电流 【引 言】: 扫描隧道显微镜 scanning tunneling microscope 缩写为STM 。它作为一种扫描探针显微术工具,扫描隧道显微镜可以让科学家观察和定位单个原子,它具有比它的同类原子力显微镜更加高的分辨率。此外,扫描隧道显微镜在低温下(4K )可以利用探针尖端精确操纵原子,因此它在纳米科技既是重要的测量工具又是加工工具。 STM 使人类第一次能够实时地观察单个原子在物质表面的排列状态和与表面电子行为有关的物化性质,在表面科学、材料科学、生命科学等领域的研究中有着重大的意义和广泛的应用前景,被国际科学界公认为20世纪80年代世界十大科技成就之一。 一、实验原理 先简单介绍一起各部分的工作原理 1、 隧道电流: 扫描隧道显微镜的工作原理是基于量子力学的隧道效应.对于经典物理学来说,当一粒子的动能E 低于前方势垒的高度V0时,它不可能越过此势垒,即透射系数等于零,粒子将完全被弹回.而按照量子力学的计算,在一般情况下,其透射系数不等于零,也就是说,粒子可以穿过比它的能量更高的势垒,这个现象称为隧道效应,它是由于粒子的波动性而引起的,只有在一定的条件下,这种效应才会显著。 在量子力学理论中,电子具有波动性,其位置是弥散的,在()V r E >的区域, 薛定谔方程:()()()()22/2r h m V V r r e ψ??-+ψ=?? 的解不一定是零(如果V 不是无限大的话)。因此一个入射粒子穿透一个()V r E >的有限区域的几率是非零的,所以物质表面上的一些电子会散逸出来,在样品四周形成电子云。在导体表面上之外空间的某一位置发现电子的几率会随这个位置与表面距离的增大而呈现指数形式的衰减。隧道效应的物理意义: STM 的工作原理来源于量子力学的隧道效应贯穿原理。其核心是一个能在样品表面上扫描,并与样品间有一定的偏置电压,其镇静为原子尺度的针尖,由于电子隧穿的几率与势垒()V r 的
原子力显微镜(AFM)使用总结
原子力显微镜(AFM)是购买浙江大学光电研究所研制的,已经使用一年多,中间出现些问题,也都解决了,现在做个总结: 1、设备 信号来源:激光 信号接收:PSD(Position Sensitive Detector)全称为位置传感检测器,输出的是模拟信号,线性度好、响应快。 探针:在镀金的小矩形上,每头有一大一小的等腰三角形,探针三角形顶端,垂直于三角形平面,肉眼只能看到三角形,看不到探针,一个矩形上有四个探针可以使用。 压电陶瓷:样品在测试过程中,三维方向的运动是通过三根压电陶瓷的位移产生 信号放大、反馈、数据采集、显示 2、过程 1、把用探针的小矩形用双面胶贴好,矩形伸出的长度一般为小于或接近长边的一半,用四个控制螺钉调节激光器,使激光照在三角形的边上,直到产生衍射条纹,并且衍射条纹在PSD左侧,不能在PSD光敏面上,倾斜方向 \ ,光斑中心居中,激光照在三角形边上达到衍射条件时将产生强的反射光; 2、用双面胶把待测样品粘在样品台上,双面胶要贴平,样品要测得地方不能太靠样品台中心,因为在测试时探针接触的位置不是在样品台的中心,然后把样品台固定在三根压电陶瓷构成的支杆上,适当转动样品台,使待测样品的中心与探针的位置相对; 3、用粗调使试样向探针运动,此时为了观察可把激光关了,当接近至1~2mm 时打开激光,使用细调,观察控制面板上PSD反馈信号、Z轴反馈信号的变化、衍射光斑的变化,但衍射光斑移动时说明已进入原子力的作用范围,应缓慢调节旋钮,在光斑移动迅速的时候应适当方向调节旋钮,防止调过,在PSD信号为1.6,Z轴反馈信号-200~-300时即可进行测试。 3、出现的问题和解决方法 3.1 Z轴反馈信号不稳定
AFM原子力显微镜技术及应用实验报告
原子力显微技术观测薄膜形貌 姓名:吴涵颖学号:5404312065 班级:工业工程122 一、实验目的: Ⅰ、学习和了解AFM的结构和原理。 Ⅱ、掌握AFM的操作和调试过程,并以之来观察薄膜表面的形貌。 Ⅲ、学习用计算机软件来处理原始数据图像。 二、实验原理简析: 1. AFM基本原理 原子力显微镜的工作原理就是将探针装在一弹性微悬臂的一端,微悬臂的另一端固定,当探针在样品表面扫描时,探针与样品表面原子间的排斥力会使得微悬臂轻微变形,这样,微悬臂的轻微变形就可以作为探针和样品间排斥力的直接量度。一束激光经微悬臂的背面反射到光电检测器,可以精确测量微悬臂的微小变形,这样就实现了通过检测样品与探针之间的原子排斥力来反映样品表面形貌和其他表面结构。 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。如图一显示。 (1)力检测部分在原子力显微镜系统中,所要检测的力是原子与原子之间的范德华力。使用微悬臂来检测原子之间力的变化量。如图2所示,微悬臂通常由一个一般100~500μm长和大约500nm~5μm厚的硅片或氮化硅片制成。微悬臂顶端有一个尖锐针尖,用来检测样品-针尖间的相互作用力。 (2)位置检测部分在原子力显微镜系统中,当针尖与样品之间有了作用之后,会使得悬臂摆动,所以当激光照射在微悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量的产生。在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理。聚焦到微悬臂上面的激光反射到激光位置检测器,通过对落在检测器四个象限的光强
进行计算,可以得到由于表面形貌引起的微悬臂形变量大小,从而得到样品表面的不同信息。 (3)反馈系统在原子力显微镜系统中,将信号经由激光检测器取入之后,在反馈系统中会将此信号当作反馈信号,作为内部的调整信号,并驱使通常由压电陶瓷制作的扫描器做适当的移动,以保持样品与针尖保持一定的作用力。 2.AFM 有三种不同的工作模式: 接触模式( contact mode) 、非接触模式(noncontact mode) 和共振模式或轻敲模式(Tapping Mode) 。 (1)接触模式: 从概念上来理解,接触模式是AFM最直接的成像模式。AFM 在整个扫描成像过程之中,探针针尖始终与样品表面保持亲密的接触,而相互作用力是排斥力。扫描时,悬臂施加在针尖上的力有可能破坏试样的表面结构,因此力的大小范围在10 - 10~10 - 6 N。若样品表面柔嫩而不能承受这样的力,便不宜选用接触模式对样品表面进行成像。 (2)非接触模式 非接触模式探测试样表面时悬臂在距离试样表面上方5~10 nm 的距离处振荡。这时,样品与针尖之间的相互作用由范德华力控制,通常为10 - 12 N ,样品不会被破坏,而且针尖也不会被污染,特别适合于研究柔嫩物体的表面。这种操作模式的不利之处在于要在室温大气环境下实现这种模式十分困难。因为样品表面不可避免地会积聚薄薄的一层水,它会在样品与针尖之间搭起一小小的毛细桥,将针尖与表面吸在一起,从而增加尖端对表面的压力。 (3)敲击模式 在敲击模式中,一种恒定的驱使力使探针悬臂以一定的频率振动。当针尖刚接触样品时,悬臂振幅会减少到某一数值。在扫描过程中,反馈回路维持悬臂振幅在这一数值恒定,亦即作用在样品上的力恒定,通过记录压电陶瓷管的移动得到样品表面形貌图。对于接触模式,由于探针和样品间的相互作用力会引起微悬臂发生形变,也就是说微悬臂的形变作为样品和针尖相互作用力的直接度量。同上述轻敲式,反馈系统保持针尖—样品作用力恒定从而得到表面形貌图。 原子力显微镜是用微小探针“摸索”样品表面来获得信息,所以测得的图像是样品最表面的形貌,而没有深度信息。扫描过程中,探针在选定区域沿着样品表面逐行扫描。 实验扫描的是光栅,纳米铜微粒以及纳米微粒,选用的是轻敲式。 敲击模式优点:敲击模式在一定程度上减小样品对针尖的粘滞现象,因为针尖与样品表面接触时,利用其振幅来克服针尖"样品间的粘附力。并且由于敲击模式作用力是垂直的,表面材料受横向摩擦力和剪切力的影响都比较小,减小扫描过程中针尖对样品的损坏。所以对于较软以及粘性较大的样品,应选用敲击模式。 三、实验步骤: 一、实验前准备: ①样品制备 1)薄膜样品制备 把之前实验制备得的铜微粒纳米材料分散到溶剂中,比较稀的状态下,然后涂于解离后的云母片上,自然晾干。 2)纳米微粒制备 把纳米微粒材料分散到溶剂中,比较稀的状态下,然后涂于解离后的云母片
(AFM)原子力显微镜原理介绍
原子力显微镜(AFM)原理 一、原理 原子力显微镜(Atomic Force Microscopy, AFM)是由IBM公司的Binnig与史丹佛大学的Quate于一九八五年所发明的,其目的是为了使非导体也可以采用扫描探针显微镜(SPM)进行观测。 图1、原子与原子之间的交互作用力因为彼此之间的距离 的不同而有所不同,其之间的能量表示也会不同。 原子力显微镜(AFM)与扫描隧道显微镜(STM)最大的差别在于并非利用电子隧道效应,而是利用原子之间的范德华力(Van Der Waals Force)作用来呈现样品的表面特性。假设两个原子中,一个是在悬臂(cantilever)的探针尖端,另一个是在样本的表面,它们之间的作用力会随距离的改变而变化,其作用力与距离的关系如“图1”所示,当原子与原子很接近时,彼此电子云斥力的作用大于原子核与电子云之间的吸引力作用,所以整个合力表现为斥力的作用,反之若两原子分开有一定距离时,其电子云斥力的作
用小于彼此原子核与电子云之间的吸引力作用,故整个合力表现为引力的作用。若以能量的角度来看,这种原子与原子之间的距离与彼此之间能量的大小也可从Lennard –Jones的公式中到另一种印证。 为原子的直径为原子之间的距离 从公式中知道,当r降低到某一程度时其能量为+E,也代表了在空间中两个原子是相当接近且能量为正值,若假设r增加到某一程度时,其能量就会为-E同时也说明了空间中两个原子之间距离相当远的且能量为负值。不管从空间上去看两个原子之间的距离与其所导致的吸引力和斥力或是从当中能量的关系来看,原子力显微镜就是利用原子之间那奇妙的关系来把原子样子给呈现出来,让微观的世界不再神秘。 在原子力显微镜的系统中,是利用微小探针与待测物之间交互作用力,来呈现待测物的表面之物理特性。所以在原子力显微镜中也利用斥力与吸引力的方式发展出两种操作模式: (1)利用原子斥力的变化而产生表面轮廓为接触式原子力显微镜(contact AFM),探针与试片的距离约数个?。 (2)利用原子吸引力的变化而产生表面轮廓为非接触式原子力显微镜(non-contact AFM),探针与试片的距离约数十到数百?。 二、原子力显微镜的硬件架构: 在原子力显微镜(Atomic Force Microscopy,AFM)的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。
南京大学-原子力显微镜实验报告
原子力显微镜实验报告 一.实验目的 1.了解原子力显微镜的工作原理 2.掌握用原子力显微镜进行表面观测的方法 二.实验原理 1.AFM工作原理 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。在AFM 中用一个安装在对微弱力极敏感的微悬臂上的极细探针。当探针与样品接触时,由于它们原子之间存在极微弱的作用力(吸引或排斥力) ,引起微悬臂偏转。扫描时控制这种作用力恒定,带针尖的微悬臂将对应于原子间作用力的等位面,在垂直于样品表面方向上起伏运动, 因而会使反射光的位置改变而造成偏移量,通过光电检测系统(通常利用光学、电容或隧道电流方法) 对微悬臂的偏转进行扫描,测得微悬臂对应于扫描各点的位置变化, 此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整。将信号放大与转换从而得到样品表面原子级的三维立体形貌图像。AFM 的核心部件是力的传感器件, 包括微悬臂(Cantilever) 和固定于其一端的针尖。根据物理学原理,施加到Cantilever末端力的表达式为: F K Z =? ?表示针尖相对于试样间的距离, K为Cantilever的弹性系数,力的变化均可以通过Cantilever Z 被检测。 AFM 有三种不同的工作模式:接触模式、非接触模式和共振模式或轻敲模式。本实验采用接触模式:样品扫描时,针尖始终同样品“接触”,即针尖-样品距离在小于零点几个纳米的斥力区域。此模式通常产生稳定、高分辨图像。当沿着样品扫描时,由于表面的高低起伏使得针尖-样品距离发生变化,引起它们之间作用力的变化,从而使悬臂形变发生改变。当激光束照射到微悬臂的背面,
原子力显微镜AFM实验报告
原子力显微镜的应用和进展 摘要:从原子力显微镜诞生以来,由于其在表面观测上的高分辨率以及对表面的 要求较低,这项技术被广泛的应用于科研的各个领域,极大的促进了各学科的发展。由于这项技术的重要性,在其诞生之后就一直被改进以满足不同学科不同场合的需求。本文从具体原子力实验出发概述原子力显微镜的应用以及改进方案。 关键词:原子力显微镜 压电微悬臂 敲击式AFM 探针功能化 1 引言 1996年Binning 及其合作者在扫描隧道显微镜的基础上发明了AFM ,它是利用原子、分子间的相互作用力(主要范德瓦尔斯力,价键力,表面张力,万有引力,以及静电力和磁力等)来观察物体表面微观形貌的新型实验技术。在这项表面观测技术发明以来已经被各学科所采纳、改进,以适应不同学科不同工作环境的需求。比如在生物及医学研究中要求不能对活体细胞产生太大影响,要求力更小以免对膜有破坏作用,同时也要求原子力显微镜的扫描更快,更方便以适应更多学科对它的需求,最好能实现更好的自动化,同时最好能应用于不同的环境。但现在而言原子力显微镜对环境的要求还是很高的,所以对原子力显微镜的改进也是件十分有意义的工作。现在有的一个想法是对原子力显微镜的微悬臂进行改造,用压电微悬臂[4]替代,这样直接利用压电微悬臂收集数据以替代激光放大。另外,将原子力显微镜应用于生物和医学的研究,也提出了对探针进行功能化[5]的要求。 2 原子力实验简介 2.1 实验原理 AFM 探针和测试样品表面原子相互靠近时会产生原子间相互作用力,这种力使连接探针的微悬臂发生形变,而通过激光检测器和反馈系统调整样品在z 轴方向的位置,使得探针和样品间的作用力保持恒定,通过测量检测信号对应样品的扫描位置的变化,就可以得到测试样品表面形貌特征。通常原子力显微镜AFM 有几种运行模式:在斥力或接触模式中,力的量级为1∽10ev/ A (或910-∽810-N );在引力或非接触模式中,范德瓦耳斯力、交换力、静电力或磁力被检测。这些不能提供原子分辨率但可得到表面有关的重要信息。[1] 对于原子力显微镜,通用的工作模式有接触(AFM )和敲击式(tapping AFM )。在敲击模式中,一种恒定的驱使力使探针悬臂以一定的频率振动。当针尖刚接触